Super-Resolution Restoration of MISR Images Using the UCL MAGiGAN System



Abstract
:1. Introduction
1.1. Previous Work
2. Materials and Methods
2.1. Datasets
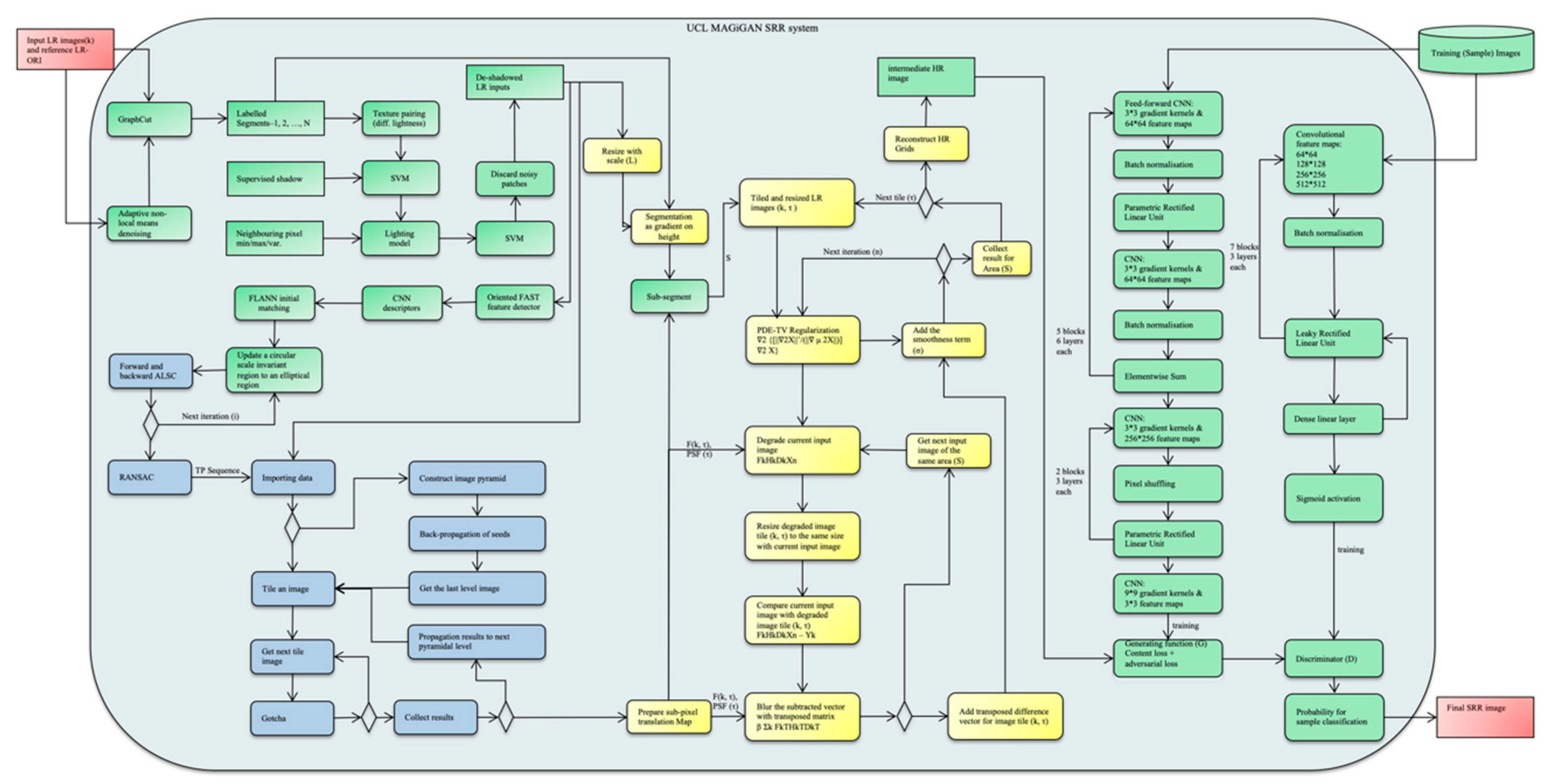
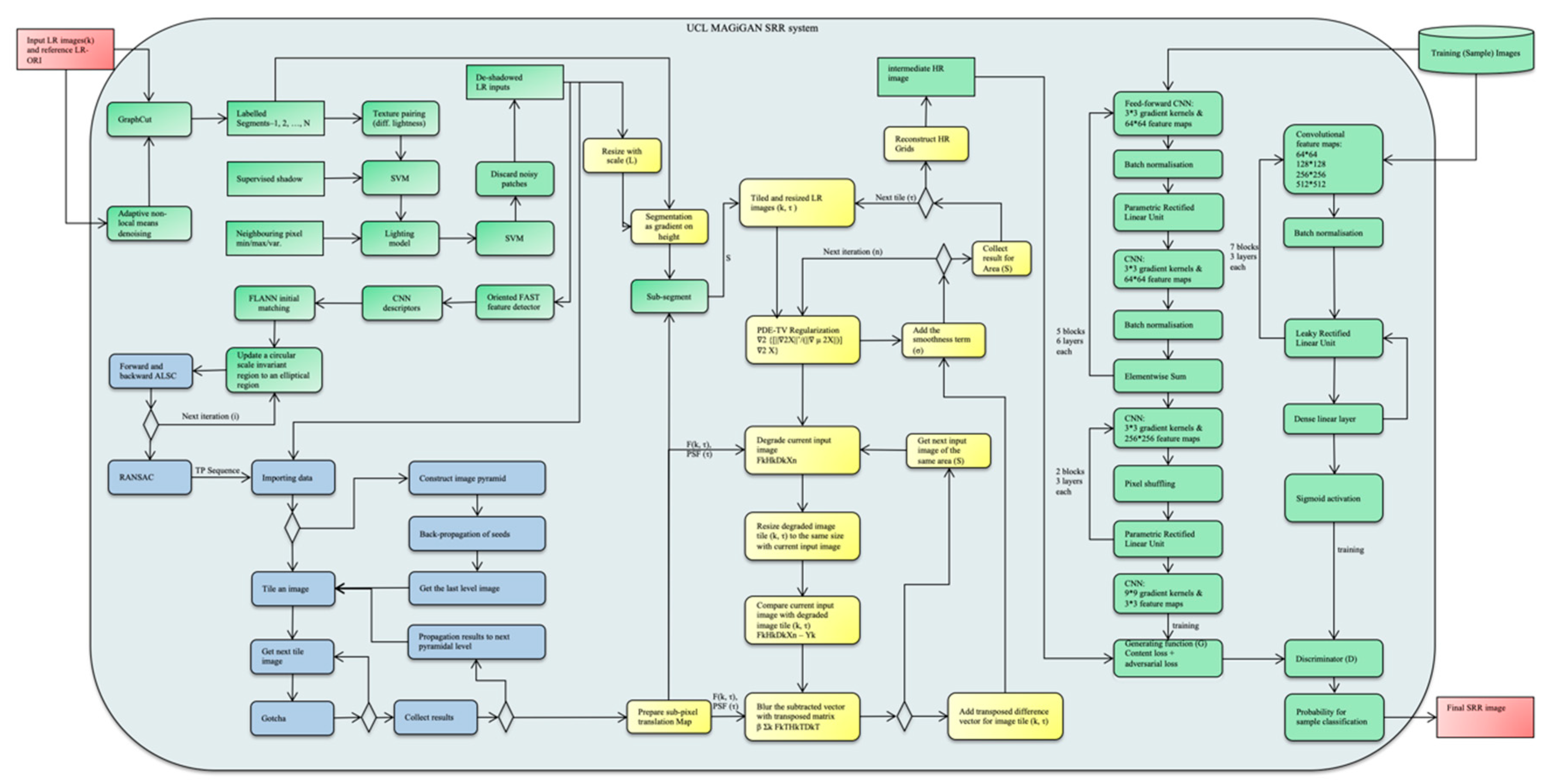
2.2. Methods
- (1)
- Image segmentation and de-shadowing;
- (2)
- Initial feature matching and subpixel refinement;
- (3)
- Subpixel feature densification;
- (4)
- Estimation of the image degradation model;
- (5)
- GAN network training and SRR refinement (prediction).
- (1.1)
- Pair the segmented image patches for the same region from multiple LR images using normalized cross-correlation;
- (1.2)
- If paired segments are found with the same illumination, they should be labelled with the same shadow notation (either shadowed or non-shadowed);
- (1.3)
- If paired segments are found with different illumination, and one segment is much darker (at a given threshold) than the other one, the darker segment is labelled as a shadow;
- (1.4)
- Use a pre-trained SVM [38] classifier to correct the shadow labels produced from previous step in order to increase the confidence of the shadow labelling. Note that the SVM classifier is pre-trained using a small amount of manually selected shadowed and non-shadowed segments from the GC results;
- (1.5)
- Group the connected shadowed patches or non-shadowed patches to one shadow segment or one non-shadow segment;
- (1.6)
- Correct the illumination of the shadow segments using illumination statistics from the neighboring non-shadowed pixels. Note that not all shadow segments are correctable, the intensity (texture) information may already lost during imaging. Such shadow segments will have a very low signal to noise ratio (SNR) after de-shadowing. This means that there will be no (or only very few) added feature correspondences for that region after the de-shadowing process;
- (1.7)
- In case of irrecoverable shadowed segments, the de-shadowed segments are reversed back to their original intensities.
- (2.1)
- Derive initial feature points by considering a circle of 16 pixels around a local maximal point, if 12 out of 16 pixels are all brighter or all darker than a given threshold from the center point, then record it as an initial feature point;
- (2.2)
- Refine the initial feature points using a pre-trained decision tree classifier (ID3 algorithm) to produce optimal choices of feature points;
- (2.3)
- Compare adjacent feature points according to their sum of absolute differences (SAD) between the feature points and 16 surrounding pixel values and discard the adjacent feature points with a lower SAD;
- (2.4)
- At each scale, extract circular patches of 15 by 15 pixels around each FAST feature points;
- (2.5)
- Use a pre-trained CNN model consisting of 3 convolutional layers, proposed in [40], to extract descriptors from all patches. The extracted descriptors include output vectors from all 3 convolutional layers and a fully connected layer;
- (2.6)
- Initial descriptor matching using a fast library for approximate nearest neighbor (FLANN);
- (2.7)
- Iteratively update the matched seed point locations and orientations from the previous step using forward and backward ALSC within a transformable elliptical window [2].
- (3.1)
- Tile the LR images (ensuring that each tile has sufficient number of seed points) and construct image pyramids from coarse to fine resolution;
- (3.2)
- Run ALSC on the seed points and record their similarity value;
- (3.3)
- Sort seed tie-points by similarity value;
- (3.4)
- A new matching is derived from any adjacent neighbors of the initial tie-point with the highest similarity value;
- (3.5)
- If the new match is verified by ALSC then it is considered as a seed tie-point for the next region-growing iteration;
- (3.6)
- This region growing process repeats from (3.3) to (3.5) until there are no more acceptable matches at the current level of resolution;
- (3.7)
- Propagate the intermediate correspondences to the next finer resolution level and repeat from (3.2) to (3.6) until there are no more acceptable matches at the current level of resolution;
- (3.8)
- Collect the densified subpixel correspondences from all tiles.
- (4.1)
- LR images and the initial HR grid are segmented into tiles according to the segmented patches from stage (1) processing and sub-segmentation based on a given threshold of the maximum differences of the magnitude of the distance of the motion vectors;
- (4.2)
- For the same area, each tile (t) of an initial HR image is projected with motion vector (degradation matrix F), convolved with the first estimation of the Point Spread Function (PSF) (degradation matrix H) which is assumed to be a small Gaussian kernel with various standard deviations according to the size of the segment, down-sampled (degradation matrix D) with the defined scaling factor;
- (4.3)
- Compare the degraded image with each LR image (k) tile (t) sequentially;
- (4.4)
- Add the transposed difference vector to the HR grid tile (t);
- (4.5)
- Add the smoothness term and decompose the TV regularization term with a 4th order PDE;
- (4.6)
- Repeat from (4.2) by convolving the degradation matrices with updated HR image for the next steepest descent iteration until it converges, i.e., the differences in (4.3) is minimized;
- (4.7)
- Collect the HR result for this tile (t) and then go back to (4.2) for the next tile (t + 1) until all segments converge;
- (4.8)
- Post-processing including noise filtering and de-blurring.
- (5.1)
- Train a pair of the LR and HR images in the generator network;
- (5.2)
- Minimise the perceptual loss (containing the content loss and adversarial loss) in backpropagation of the generator network;
- (5.3)
- Calculate/update parameterised weights and biases of the generator network;
- (5.4)
- Generate a fake HR image using the generator network;
- (5.5)
- Train the discriminator network with the fake HR image and a real HR image;
- (5.6)
- Calculate discriminator loss in backpropagation of the discriminator network;
- (5.7)
- Update parameterised weights and biases of the discriminator network;
- (5.8)
- Record discriminator prediction and loss;
- (5.9)
- Update the adversarial loss in the generator network;
- (5.10)
- Repeat from (5.1) to (5.9) for all training pairs until the fake HR image is classified as a real HR image.
- (5.11)
- Generate the SRR image using the intermediate HR output from stage (4) with the fully trained GAN network.
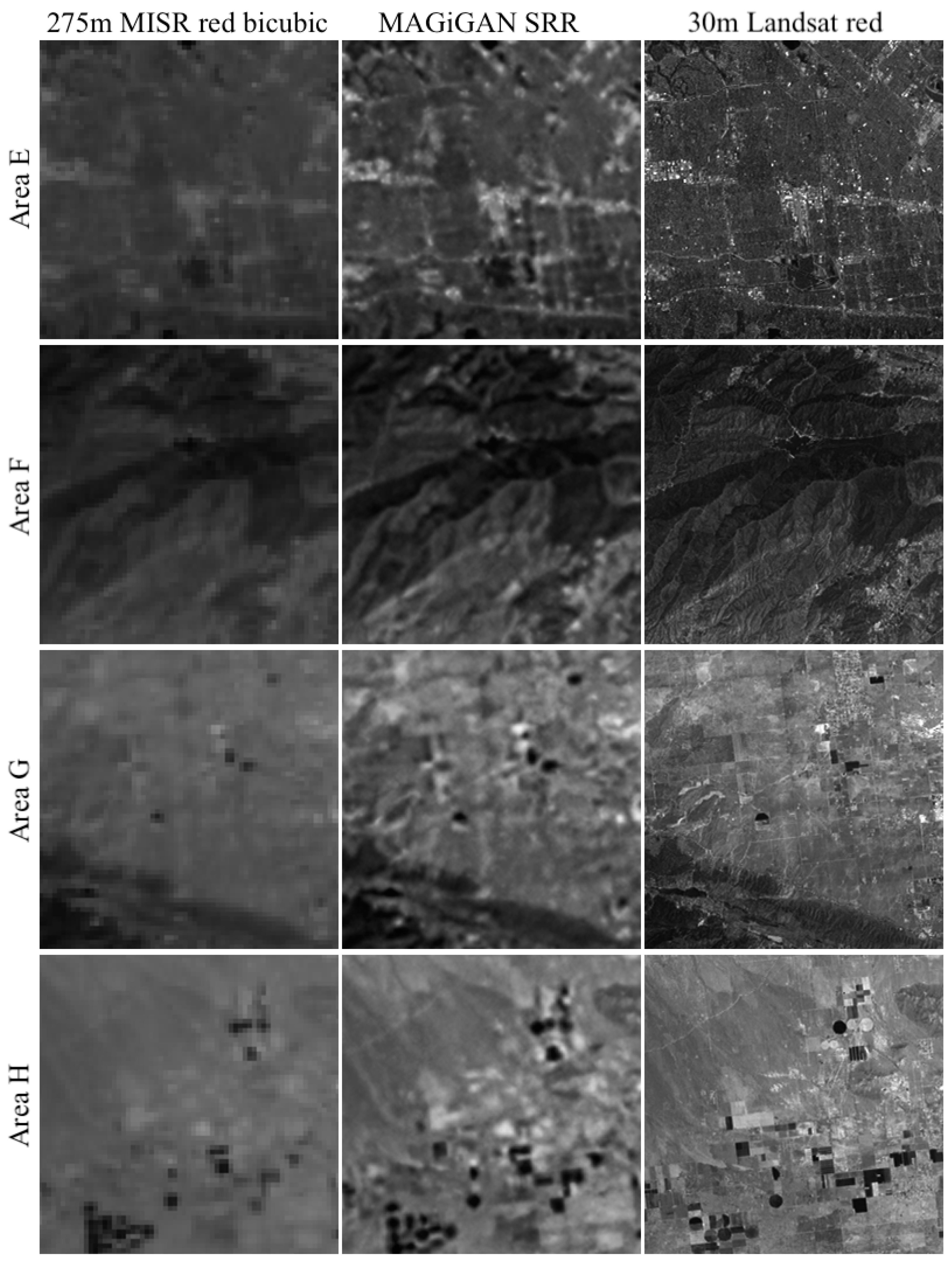
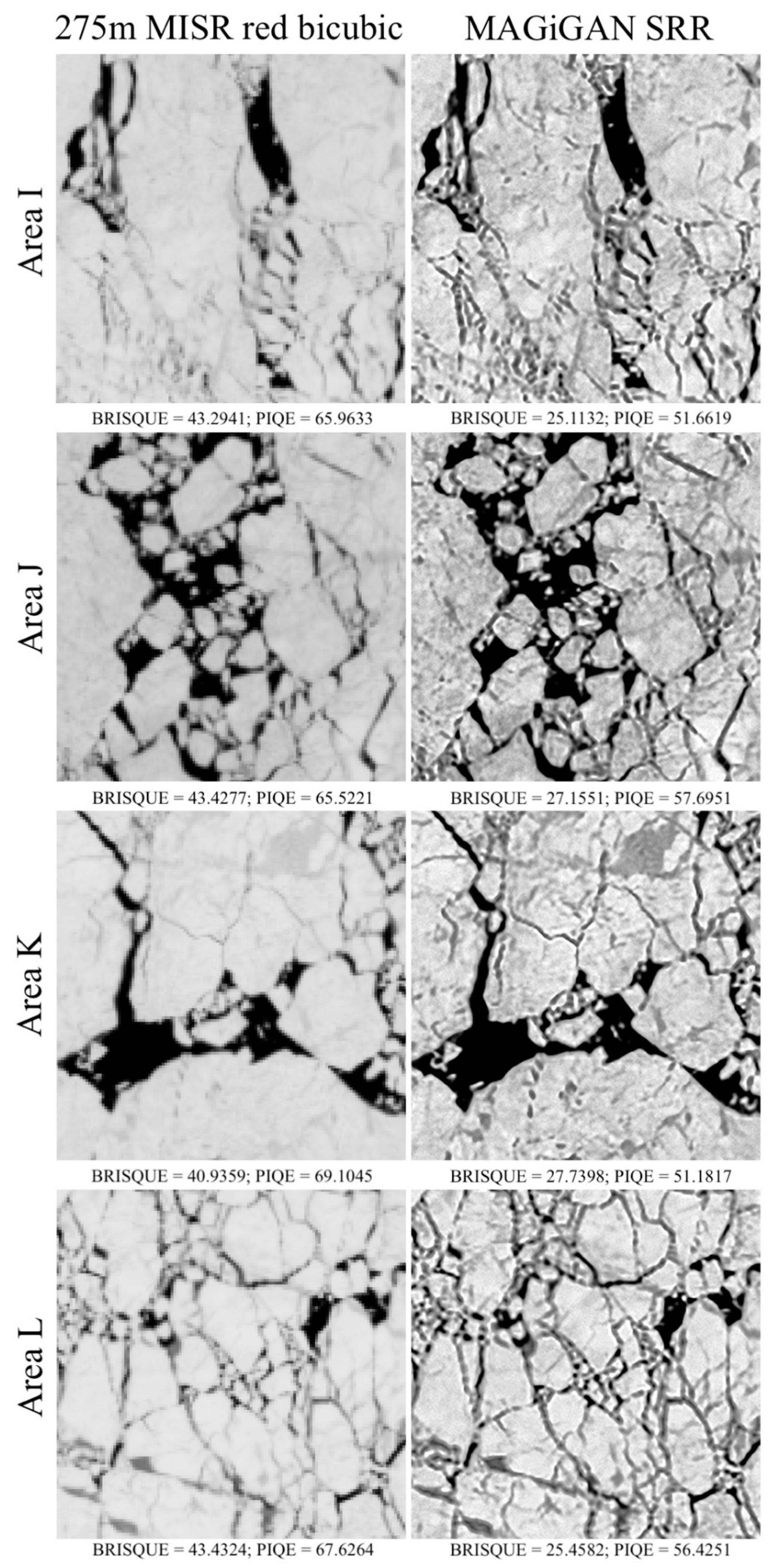
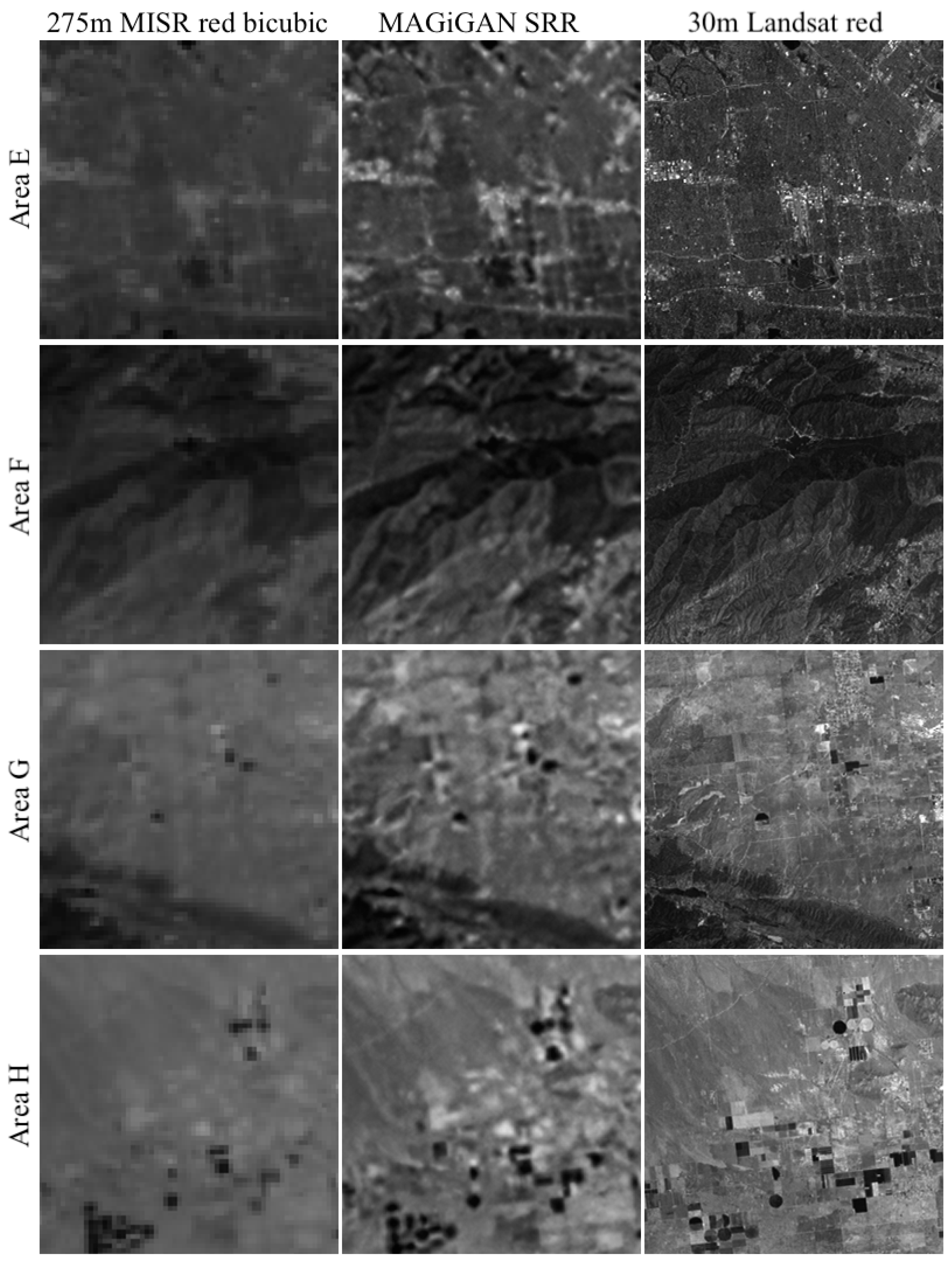
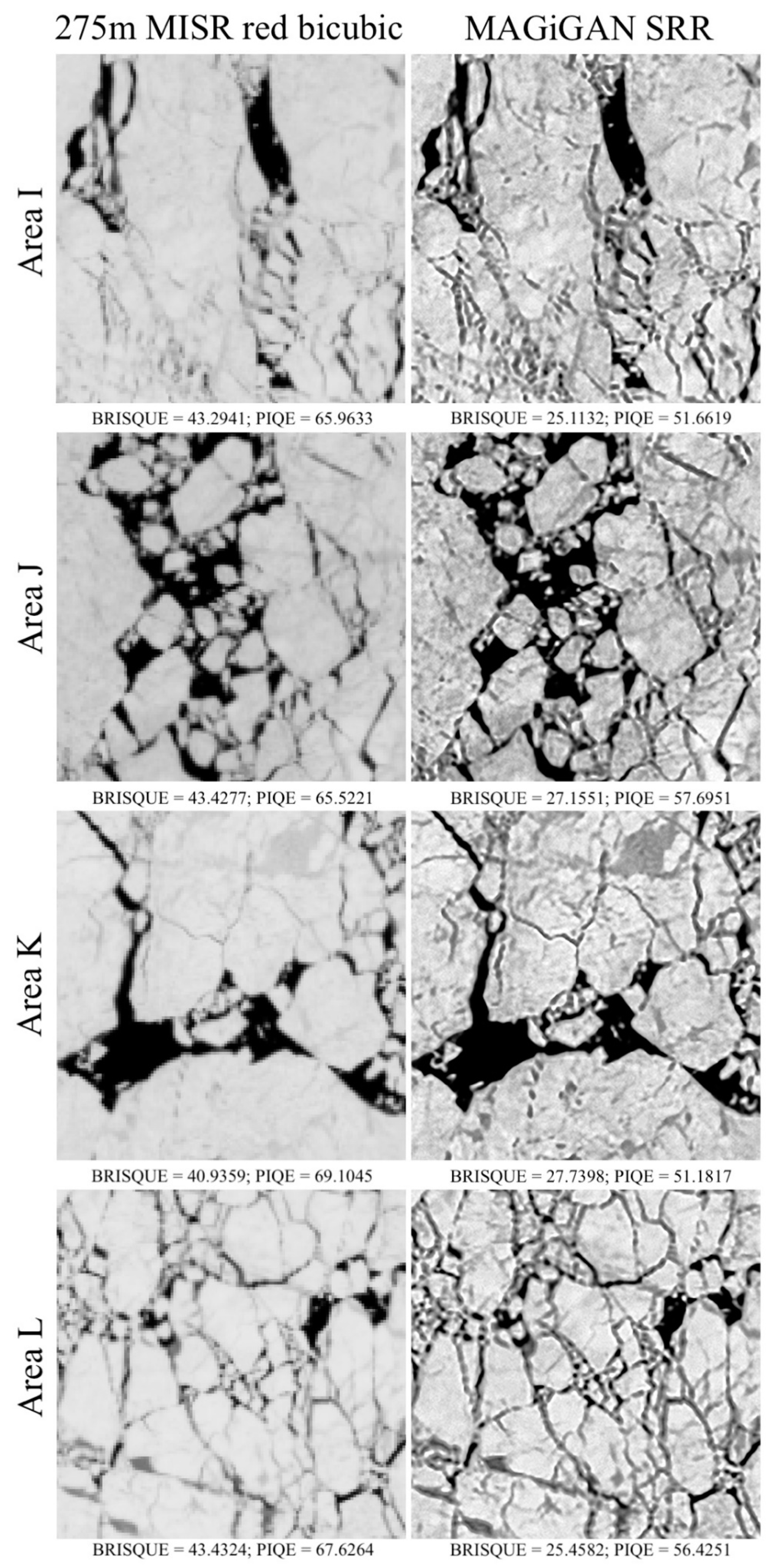
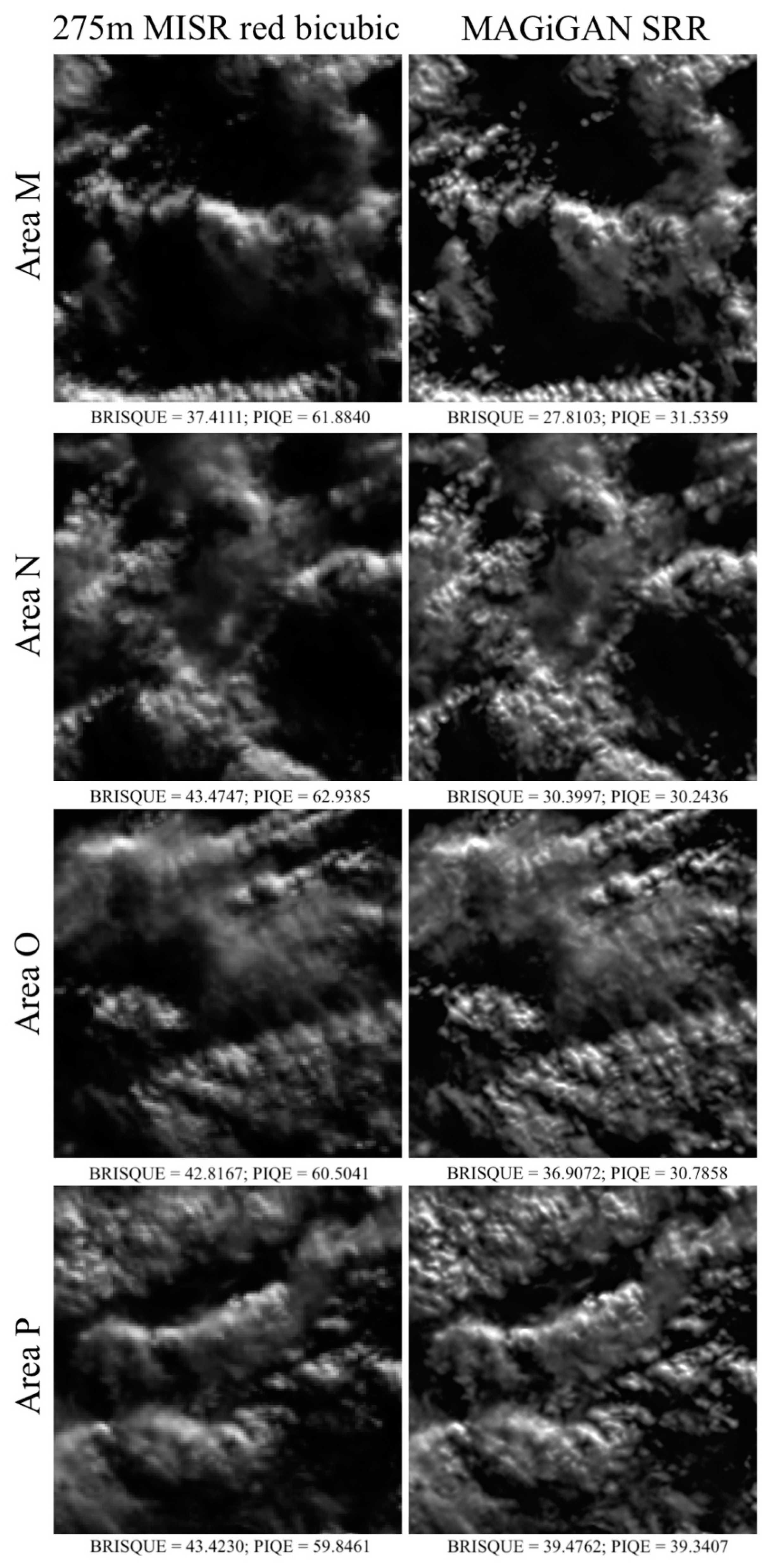
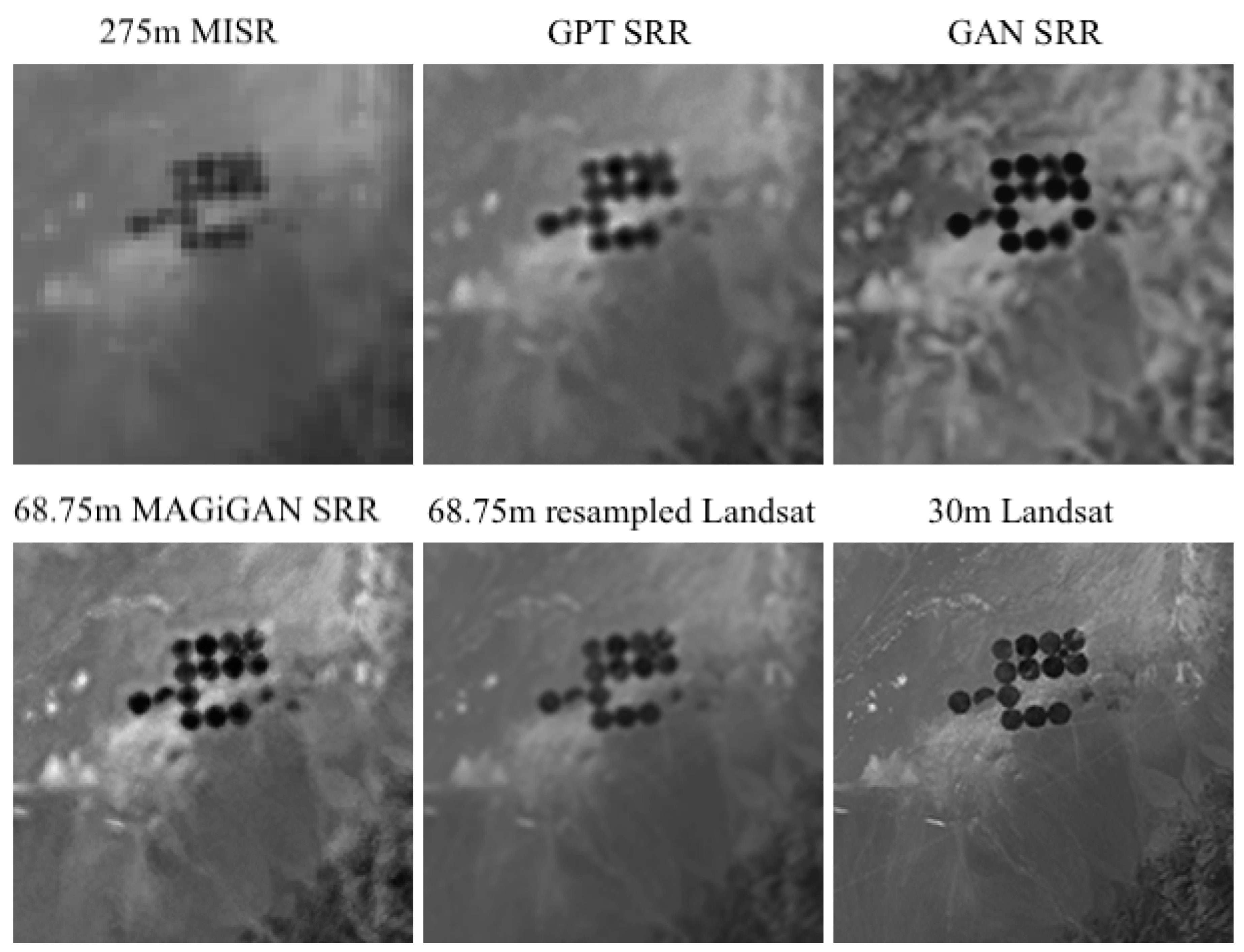
3. Results
- (1)
- Peak signal-to-noise ratio (PSNR). PSNR is derived from the mean square error (MSE), and indicates the ratio of the maximum pixel intensity to the power of the distortion. However, PSNR and MSE metrics are based on pixel-wise difference, they may not be able to capture perceptual details (e.g., high-frequency textures). Mathematical equations for PSNR calculation can be found in [35].
- (2)
- Mean Structural Similarity Index Metric (mean SSIM) [41]. SSIM combines local image structure, luminance, and contrast into a single local quality score. In this metric, structures are patterns of pixel intensities, especially among neighboring pixels, after normalizing for luminance and contrast. Because the human visual system is good at perceiving structure, the SSIM quality metric agrees more closely with the subjective quality score. Structural similarity is computed locally, a mean SSIM value of the overall image performance is calculated. Mathematical equations for mean SSIM calculation can be found in [42].
- (3)
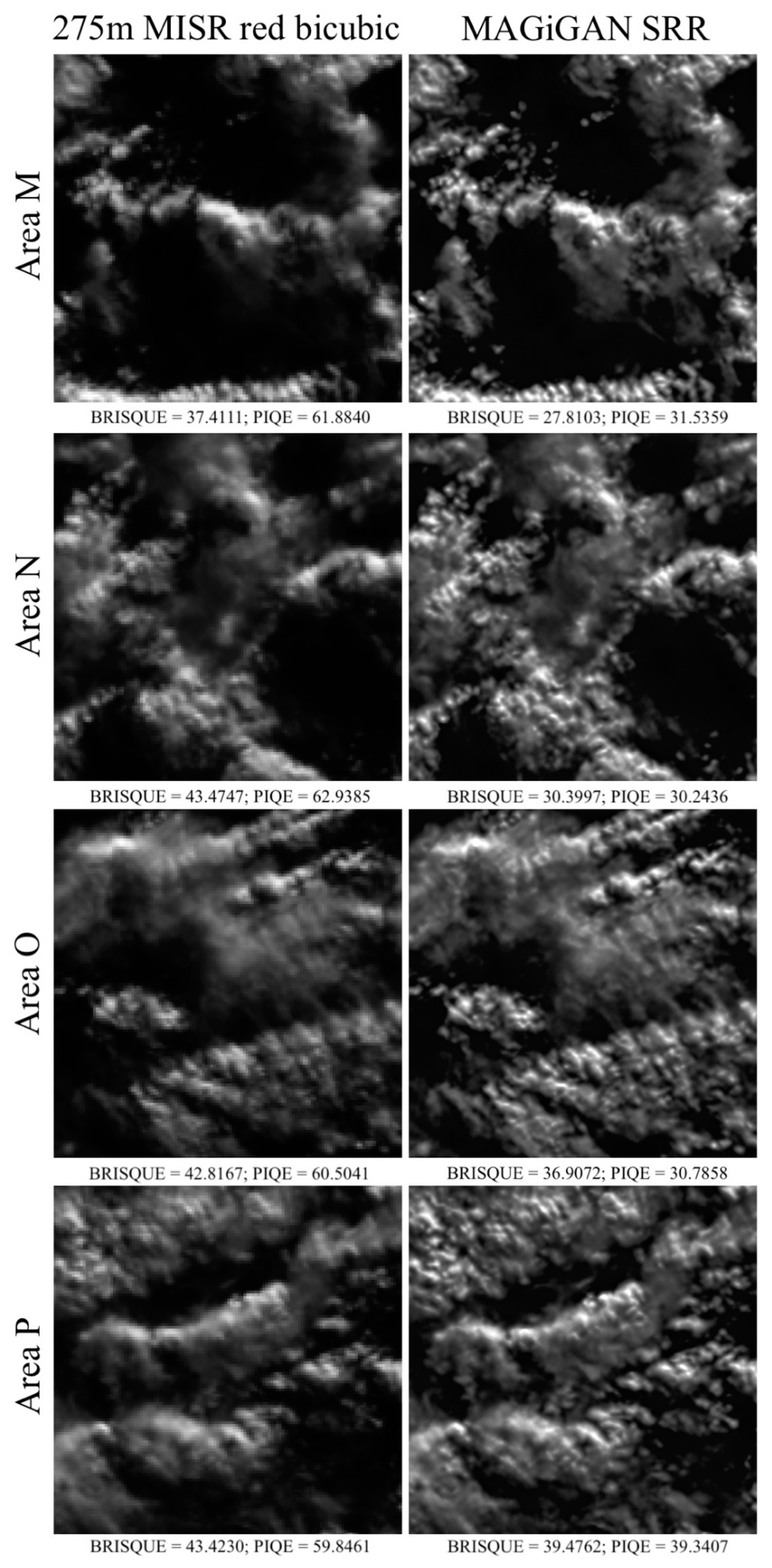
- Blind/Referenceless Image Spatial Quality Evaluator (BRISQUE) [43]. The BRISQUE model provides subjective quality scores based on a training database of images with known distortions. The score range is between 0 and 100. Lower values reflect better perceptual quality.
- (4)
- Perception-based Image Quality Evaluator (PIQE) [44]. The PIQE algorithm is opinion-unaware and unsupervised, which means it does not require a trained model. PIQE can measure the quality of images with arbitrary distortion. PIQE estimates block-wise distortion and measures the local variance of perceptibly distorted blocks to compute the quality score. The score range is between 0 and 100. Lower values reflect better perceptual quality.
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Tao, Y.; Muller, J.-P. Repeat multiview panchromatic super-resolution restoration using the UCL MAGiGAN system. In Proceedings of the Image and Signal Processing for Remote Sensing XXIV 2018, Berlin, Germany, 10–13 September 2018; Volume 10789. Issue 3. [Google Scholar]
- Tao, Y.; Muller, J.-P.; Poole, W.D. Automated localisation of Mars rovers using co-registered HiRISE-CTX-HRSC orthorectified images and DTMs. Icarus 2016, 280, 139–157. [Google Scholar] [CrossRef]
- Rosten, E.; Drummond, T. Machine Learning for High-Speed Corner Detection. Comput. Vis. 2006, 3951, 430–443. [Google Scholar] [Green Version]
- Fischer, P.; Dosovitskiy, A.; Brox, T. Descriptor matching with convolutional neural networks: A comparison to SIFT. ArXiv, 2014; arXiv:1405.5769. [Google Scholar]
- Shin, D.; Muller, J.-P. Progressively weighted affine adaptive correlation matching for quasi-dense 3D reconstruction. Pattern Recognit. 2012, 45, 3795–3809. [Google Scholar] [CrossRef]
- Tao, Y.; Muller, J.-P. A novel method for surface exploration: Super-resolution restoration of Mars repeat-pass orbital imagery. Planet. Space Sci. 2016, 121, 103–114. [Google Scholar] [CrossRef]
- Bouzari, H. An improved regularization method for artefact rejection in image super-resolution. SIViP 2012, 6, 125–140. [Google Scholar] [CrossRef]
- Guo, R.; Dai, Q.; Hoiem, D. Single-image shadow detection and removal using paired regions. In Proceedings of the IEEE Conference on CVPR 2011, Colorado Springs, CO, USA, 20–25 June 2011; pp. 2033–2040. [Google Scholar]
- Ledig, C.; Theis, L.; Huszár, F.; Caballero, J.; Cunningham, A.; Acosta, A.; Aitken, A.P.; Tejani, A.; Totz, J.; Wang, Z.; et al. Photo-Realistic Single Image Super-Resolution Using a Generative Adversarial Network. CVPR 2017, 2, 4. [Google Scholar]
- Tao, Y.; Muller, J.-P. Quantitative assessment of a novel super-resolution restoration technique using HiRISE with Navcam images: How much resolution enhancement is possible from repeat-pass observations. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 41, 503–509. [Google Scholar] [CrossRef]
- Irwin, R.; (Urthecast Corp, Vancouver, Canada); Rampersad, C.; (Urthecast Corp, Vancouver, Canada). Personal communication, 2018.
- Jovanovic, V.; Smyth, M.; Zong, J.; Ando, R. MISR Photogrammetric Data Reduction for Geophysical Retrievals. IEEE Trans. Geosci. Remote Sens. 1998, 36, 1290–1301. [Google Scholar] [CrossRef]
- Mahlangu, P.; Mathieu, R.; Wessels, K.; Naidoo, L.; Verstraete, M.; Asner, G.; Main, R. Indirect Estimation of Structural Parameters in South African Forests Using MISR-HR and LiDAR Remote Sensing Data. Remote Sens. 2018, 10, 1537. [Google Scholar] [CrossRef]
- Duchesne, R.R.; Chopping, M.J.; Tape, K.D.; Wang, Z.; Barker Schaaf, C.L. Changes in tall shrub abundance on the North Slope of Alaska 2000–2010. Remote Sens. Environ. 2018, 219, 221–232. [Google Scholar] [CrossRef]
- Scanlon, T.; Greenwell, C.; Czapla-Myers, J.; Anderson, N.; Goodman, T.; Thome, K.; Woolliams, E.; Porrovecchio, G.; Linduška, P.; Smid, M.; et al. Ground comparisons at RadCalNet sites to determine the equivalence of sites within the network. In Proceedings of the SPIE 8660 Digital Photography 2017, Melbourne, Australia, 10–13 December 2017. [Google Scholar]
- Tsai, R.Y.; Huang, T.S. Multipleframe Image Restoration and Registration. In Advances in Computer Vision and Image Processing, Greenwich; JAI Press Inc.: New York, NY, USA, 1984; pp. 317–339. [Google Scholar]
- Keren, D.; Peleg, S.; Brada, R. Image sequence enhancement using subpixel displacements. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition 1988, Ann Arbor, MI, USA, 5–9 June 1988; pp. 742–746. [Google Scholar]
- Alam, M.S.; Bognar, J.G.; Hardie, R.C.; Yasuda, B.J. Infrared image registration and high-resolution reconstruction using multiple translationally shifted aliased video frames. IEEE Trans. Instrum. Meas. 2000, 49, 915–923. [Google Scholar] [CrossRef]
- Takeda, H.; Farsiu, S.; Milanfar, P. Kernel regression for image processing and reconstruction. IEEE Trans. Image Process. 2007, 16, 349–366. [Google Scholar] [CrossRef]
- Hardie, R.C.; Barnard, K.J.; Armstrong, E.E. Joint MAP registration and high resolution image estimation using a sequence of undersampled images. IEEE Trans. Image Process. 1997, 6, 1621–1633. [Google Scholar] [CrossRef] [PubMed]
- Yuan, Q.; Zhang, L.; Shen, H. Multiframe super-resolution employing a spatially weighted total variation model. IEEE Trans. Circuits Syst. Video Technol. 2012, 22, 379–392. [Google Scholar] [CrossRef]
- Farsiu, S.; Robinson, D.; Elad, M.; Milanfar, P. Fast and robust multi-frame super-resolution. IEEE Trans. Image Process. 2004, 13, 1327–1344. [Google Scholar] [CrossRef] [PubMed]
- Purkait, P.; Chanda, B. Morphologic gain-controlled regularization for edge-preserving super-resolution image reconstruction. Signal Image Video Process. 2013, 7, 925–938. [Google Scholar] [CrossRef]
- Kumar, S.; Nguyen, T.Q. Total subset variation prior. In Proceedings of the IEEE International Conference on Image Processing 2010, Hong Kong, China, 26–29 September 2010; pp. 77–80. [Google Scholar]
- Elad, M.; Datsenko, D. Example-based regularization deployed to super-resolution reconstruction of a single image. Comput. J. 2007, 52, 15–30. [Google Scholar] [CrossRef]
- Dong, C.; Loy, C.C.; He, K.; Tang, X. Learning a deep convolutional network for image super-resolution. In Proceedings of the ECCV 2014, Zurich, Switzerland, 6–12 September 2014; pp. 184–199. [Google Scholar]
- Osendorfer, C.; Soyer, H.; Smagt, P. Image super-resolution with fast approximate convolutional sparse coding. In NIPS 2014; Springer: Cham, Switzerland, 2014; pp. 250–257. [Google Scholar]
- Yang, J.; Wang, Z.; Lin, Z.; Cohen, S.; Huang, T. Coupled dictionary training for image super-resolution. IEEE TIP 2012, 21, 3467–3478. [Google Scholar]
- Kim, J.; Lee, J.K.; Lee, K.M. Deeply-recursive convolutional network for image super-resolution. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR) 2016, Las Vegas, NV, USA, 26 June–1 July 2016; pp. 1637–1645. [Google Scholar]
- Radford, A.; Metz, L.; Chintala, S. Unsupervised representation learning with deep convolutional generative adversarial networks. ArXiv, 2015; arXiv:1511.06434. [Google Scholar]
- Lei, S.; Shi, Z.; Zou, Z. Super-resolution for remote sensing images via local–global combined network. IEEE Geosci. Remote Sens. Lett. 2017, 14, 1243–1247. [Google Scholar] [CrossRef]
- Lanaras, C.; Bioucas-Dias, J.; Galliani, S.; Baltsavias, E.; Schindler, K. Super-resolution of Sentinel-2 images: Learning a globally applicable deep neural network. ArXiv, 2018; arXiv:1803.04271. [Google Scholar]
- Pouliot, D.; Latifovic, R.; Pasher, J.; Duffe, J. Landsat Super-Resolution Enhancement Using Convolution Neural Networks and Sentinel-2 for Training. Remote Sens. 2018, 10, 394. [Google Scholar] [CrossRef]
- Arjovsky, M.; Chintala, S.; Bottou, L. Wasserstein GAN. ArXiv, 2017; arXiv:1701.07875. [Google Scholar]
- Matlab Page for PSNR Equation. Available online: https://uk.mathworks.com/help/images/ref/psnr.html (accessed on 6 December 2018).
- Bridges, J.C.; Clemmet, J.; Pullan, D.; Croon, M.; Sims, M.R.; Muller, J.-P.; Tao, Y.; Xiong, S.-T.; Putri, A.D.; Parker, T.; et al. Identification of the Beagle 2 Lander on Mars. R. Soc. Open Sci. 2017, 4, 170785. [Google Scholar] [CrossRef] [PubMed]
- Rother, C.; Kolmogorov, V.; Blake, A. GrabCut: Interactive foreground extraction using iterated graph cuts. In Proceedings of the ACM SIGGRAPH 2004, Los Angeles, CA, USA, 8–12 August 2004; pp. 309–314. [Google Scholar]
- Chang, C.-C.; Lin, C.-J. LIBSVM: A library for support vector machines. ACM Trans. Intell. Syst. Technol. 2011, 2, 1–27. [Google Scholar] [CrossRef]
- Lowe, D.G. Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Dosovitskiy, A.; Fischer, P.; Springenberg, J.T.; Riedmiller, M.; Brox, T. Discriminative unsupervised feature learning with exemplar convolutional neural networks. IEEE Trans. Pattern Anal. Mach. Intell. 2016, 38, 1734–1747. [Google Scholar] [CrossRef] [PubMed]
- Zhou, W.; Bovik, A.C.; Sheikh, H.R.; Simoncelli, E.P. Image Qualifty Assessment: From Error Visibility to Structural Similarity. IEEE Trans. Image Process. 2004, 13, 600–612. [Google Scholar]
- Matlab Page for SSIM Equation. Available online: https://uk.mathworks.com/help/images/ref/ssim.html (accessed on 6 December 2018).
- Mittal, A.; Moorthy, A.K.; Bovik, A.C. No-Reference Image Quality Assessment in the Spatial Domain. IEEE Trans. Image Process. 2012, 21, 4695–4708. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Venkatanath, N.; Praneeth, D.; Chandrasekhar, B.M.; Channappayya, S.S.; Medasani, S.S. Blind Image Quality Evaluation Using Perception Based Features. In Proceedings of the 21st National Conference on Communications (NCC) 2015, Mumbai, India, 27 February–1 March 2015. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Area | Image | Peak Signal-to-Noise Ratio (PSNR) | Mean Structural Similarity Index Metric (SSIM) | Blind/Referenceless Image Spatial Quality Evaluator (BRISQUE) % | Perception-Based Image Quality Evaluator (PIQE) % |
|---|---|---|---|---|---|
| A | MISR red band bicubic | 26.7346 | 0.7416 | 52.0543 | 66.1779 |
| SRR | 29.1094 | 0.8619 | 39.6647 | 19.7091 | |
| Landsat red band | - | 1.0 | 20.2014 | 8.1027 | |
| B | MISR red band bicubic | 23.2949 | 0.5639 | 53.4357 | 63.1433 |
| SRR | 22.1310 | 0.7496 | 45.5916 | 28.4979 | |
| Landsat red band | - | 1.0 | 19.1740 | 14.9896 | |
| C | MISR red band bicubic | 24.3419 | 0.7443 | 47.6324 | 54.6479 |
| SRR | 32.2880 | 0.8497 | 39.2999 | 30.8875 | |
| Landsat red band | - | 1.0 | 5.9161 | 10.8337 | |
| D | MISR red band bicubic | 26.2917 | 0.7161 | 49.2402 | 62.3354 |
| SRR | 27.0486 | 0.8538 | 42.0864 | 25.5005 | |
| Landsat red band | - | 1.0 | 16.9750 | 9.1723 |
| Area | Image | PSNR | Mean SSIM | BRISQUE % | PIQE % |
|---|---|---|---|---|---|
| E | MISR red band bicubic | 22.8083 | 0.4086 | 43.4232 | 62.1026 |
| SRR | 23.9358 | 0.6045 | 31.3546 | 57.5544 | |
| Landsat red band | - | 1.0 | 20.4667 | 20.7558 | |
| F | MISR red band bicubic | 27.3632 | 0.5964 | 43.2030 | 72.2120 |
| SRR | 27.2719 | 0.7147 | 35.8270 | 69.0694 | |
| Landsat red band | - | 1.0 | 28.4648 | 10.5390 | |
| G | MISR red band bicubic | 20.7561 | 0.4630 | 43.4571 | 64.9261 |
| SRR | 25.0931 | 0.6471 | 34.7673 | 57.8650 | |
| Landsat red band | - | 1.0 | 25.0066 | 11.5139 | |
| H | MISR red band bicubic | 18.9588 | 0.4824 | 43.4566 | 59.0510 |
| SRR | 22.3327 | 0.6772 | 32.8828 | 60.4824 | |
| Landsat red band | - | 1.0 | 25.9460 | 11.5531 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tao, Y.; Muller, J.-P. Super-Resolution Restoration of MISR Images Using the UCL MAGiGAN System. Remote Sens. 2019, 11, 52. https://doi.org/10.3390/rs11010052
Tao Y, Muller J-P. Super-Resolution Restoration of MISR Images Using the UCL MAGiGAN System. Remote Sensing. 2019; 11(1):52. https://doi.org/10.3390/rs11010052
Chicago/Turabian StyleTao, Yu, and Jan-Peter Muller. 2019. "Super-Resolution Restoration of MISR Images Using the UCL MAGiGAN System" Remote Sensing 11, no. 1: 52. https://doi.org/10.3390/rs11010052
APA StyleTao, Y., & Muller, J.-P. (2019). Super-Resolution Restoration of MISR Images Using the UCL MAGiGAN System. Remote Sensing, 11(1), 52. https://doi.org/10.3390/rs11010052