Suitability Assessment of X-Band Satellite SAR Data for Geotechnical Monitoring of Site Scale Slow Moving Landslides


 ,
,  , , ,
, , ,  ,
,
Abstract
1. Introduction
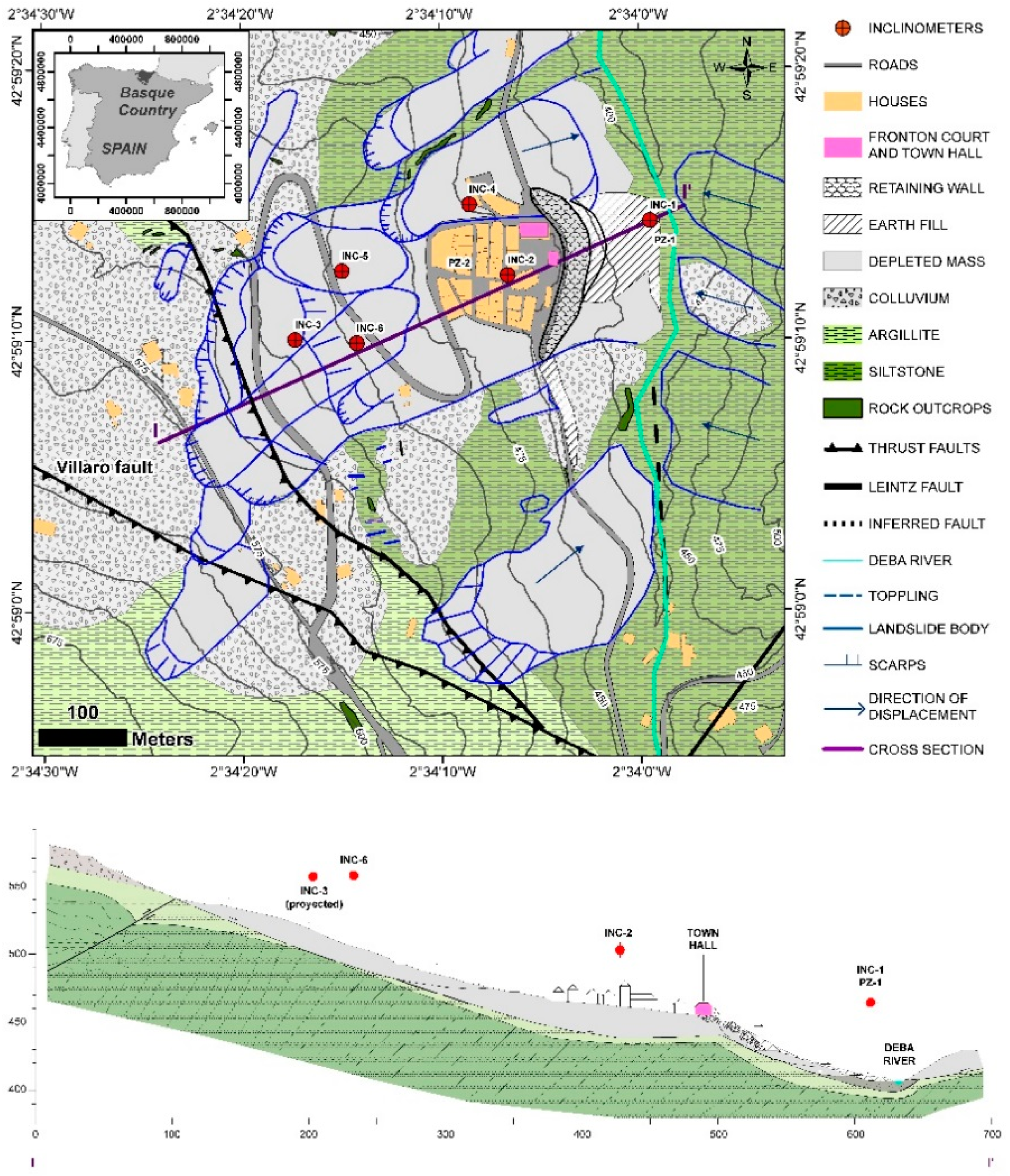
2. Leintz Gatzaga Landslide
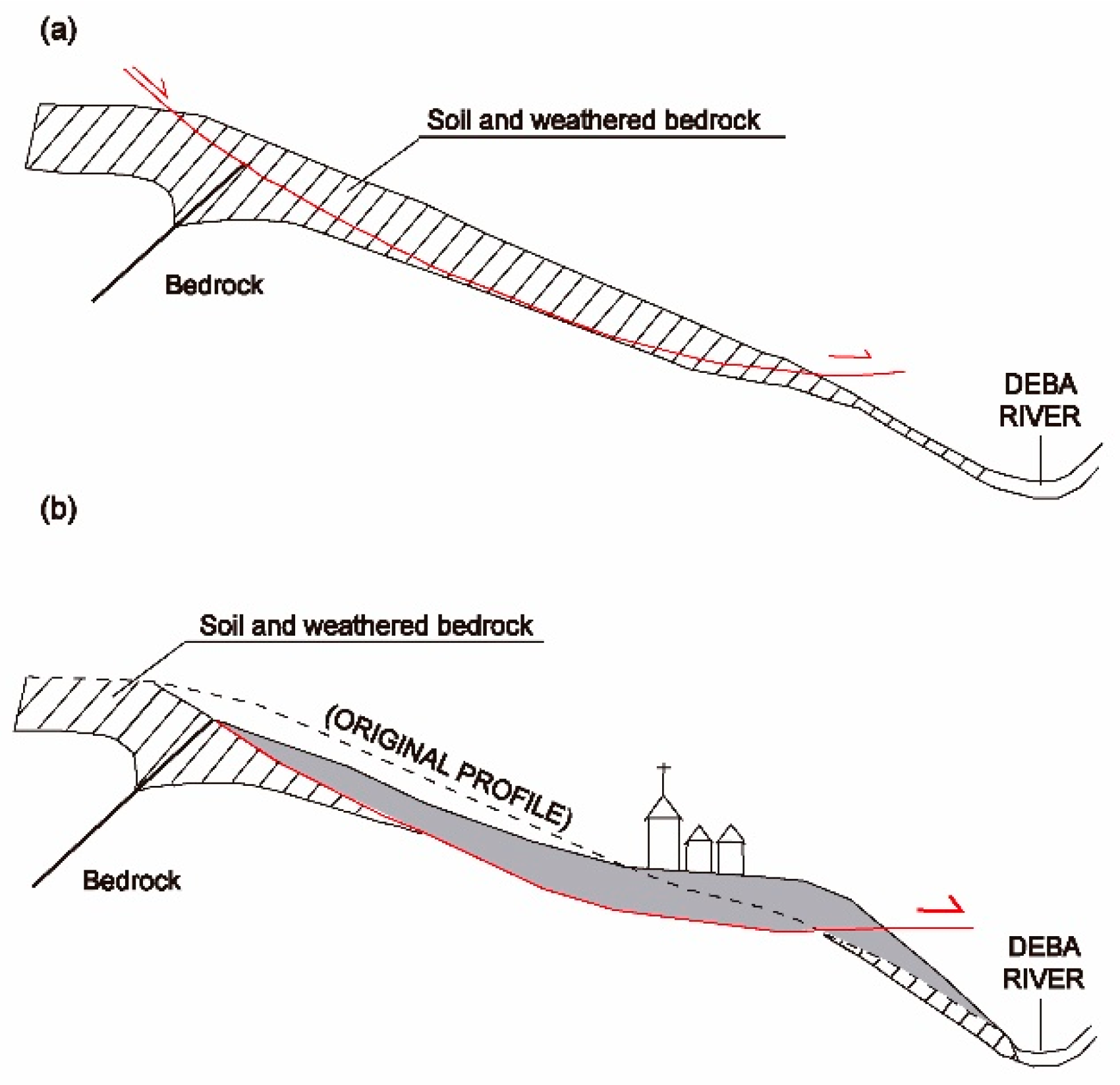
2.1. Geological Context
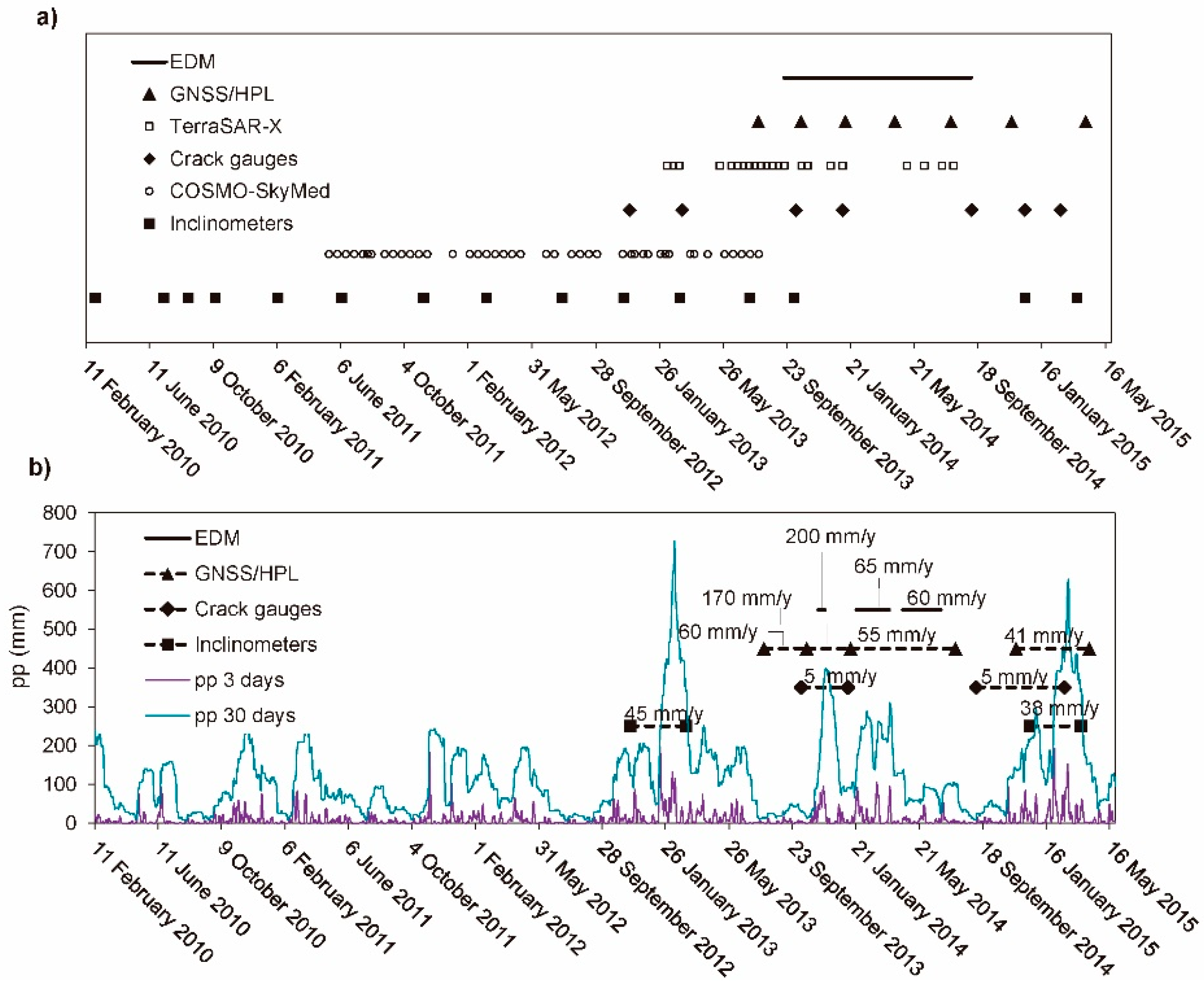
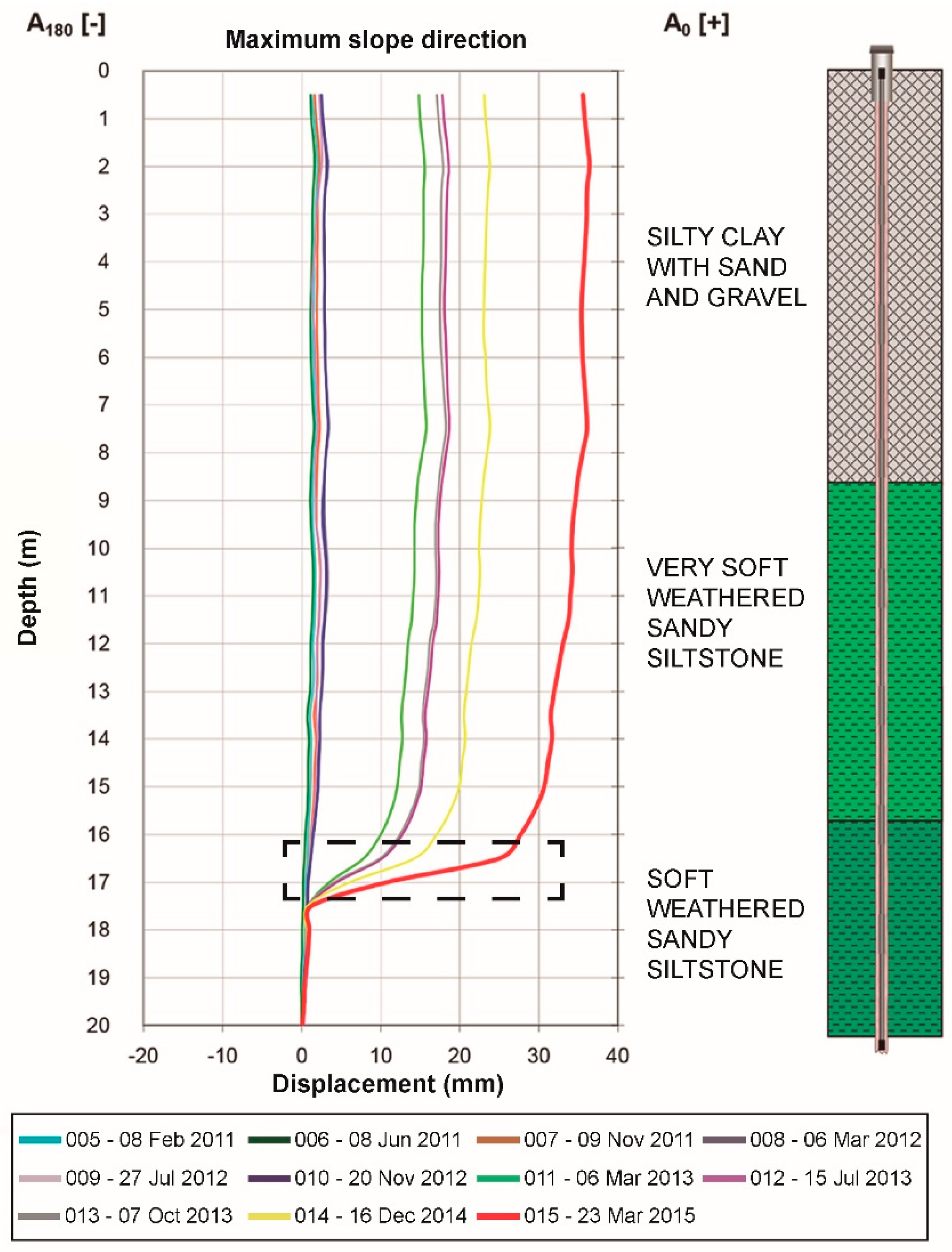
2.2. Monitoring Techniques Applied
2.3. Landslide Classification and Activity
3. Practical Guidelines for Complex Monitoring of Slow Moving Landslides
3.1. SAR Dataset Selection
3.1.1. Particular Characteristics of the Landslide Scene
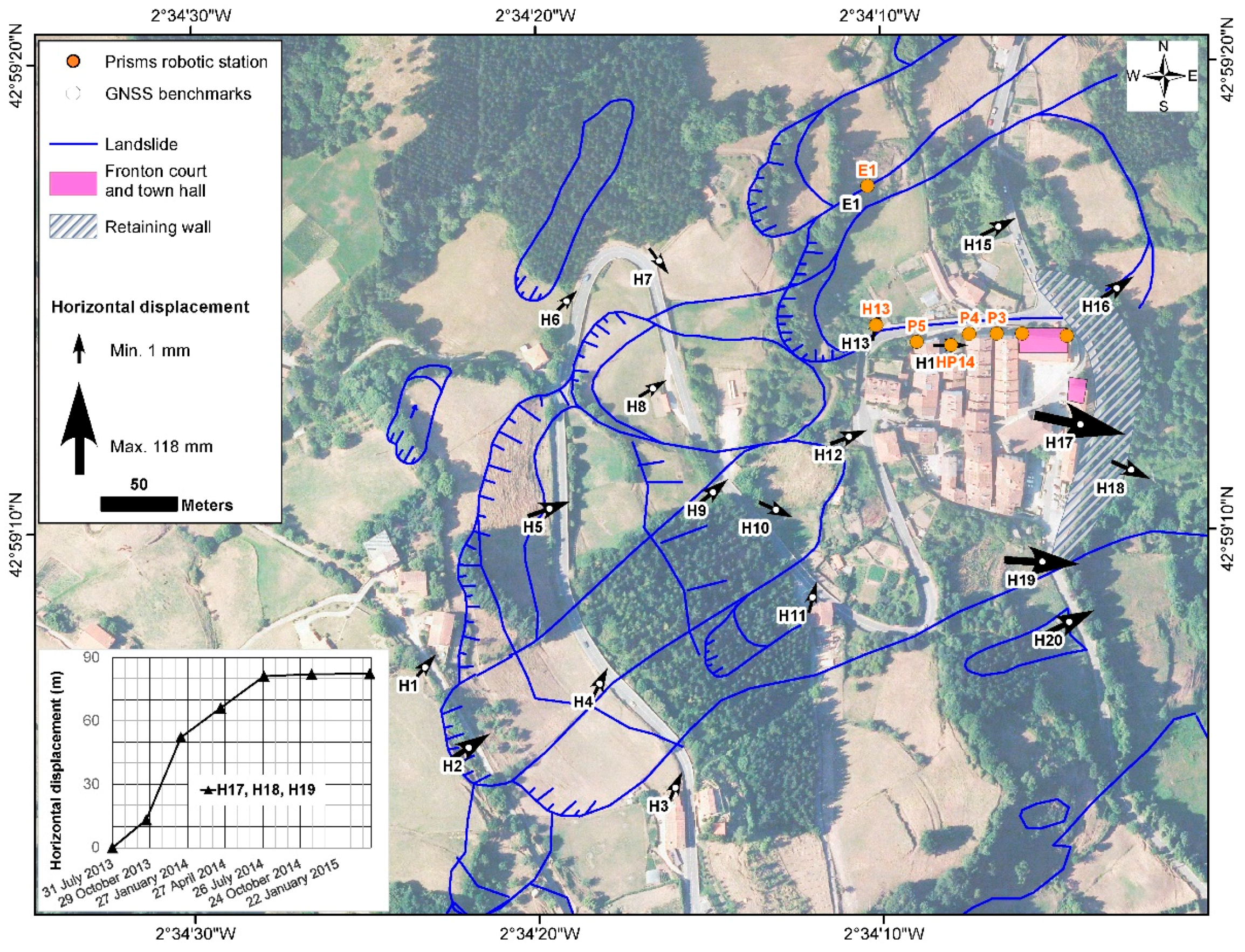
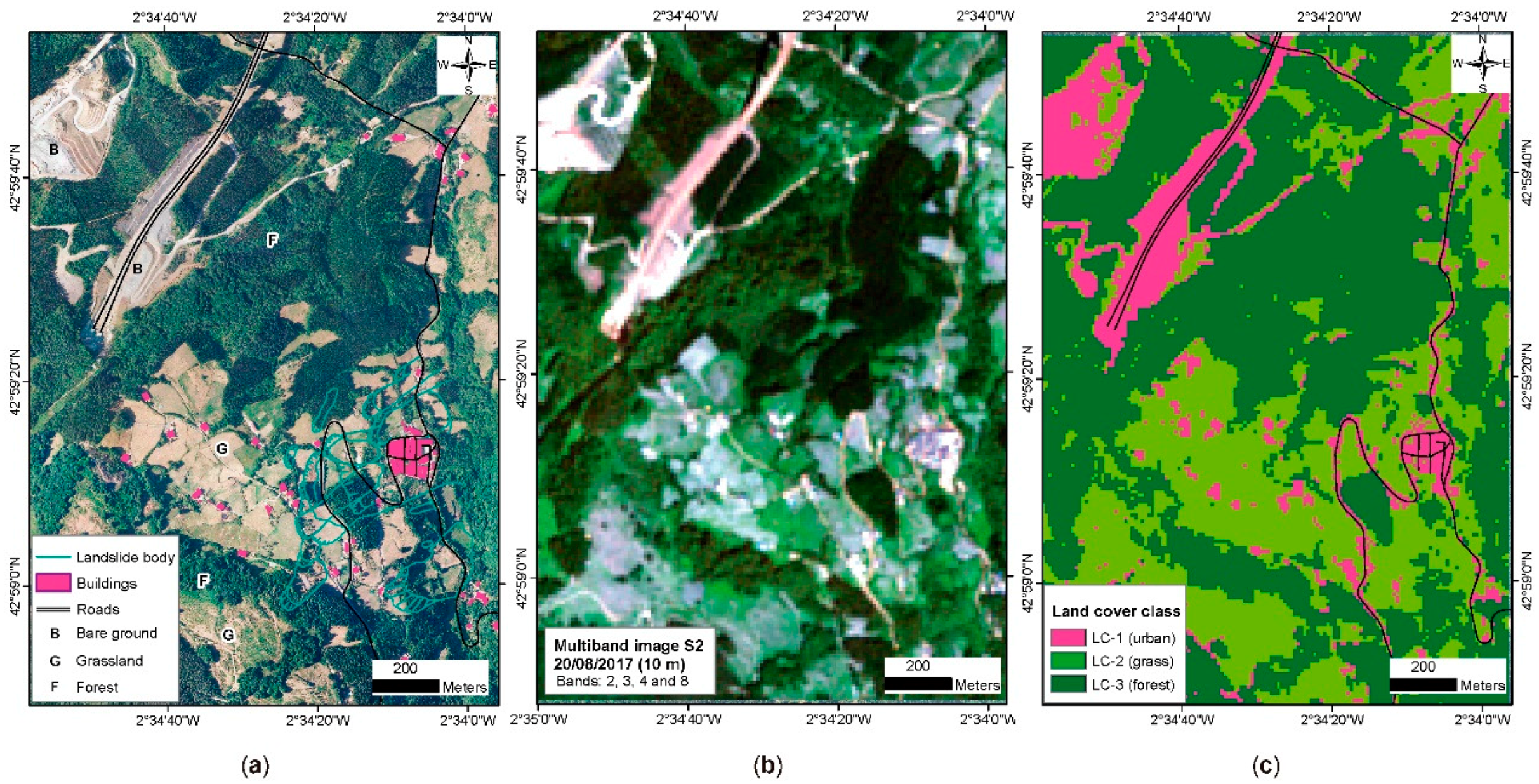
- Type of land cover: in our test-case the area of interest is characterized by both small patches of man-made structures (the village, sparse construction, and roads), which are usually coherent, and vegetated zones (pastures and forest), which instead are generally less coherent.
- Spatial extent of the phenomena: landslide extent is in the order of 300 × 600 m2.
- Deformation dynamics: according to in situ monitoring data, the expected velocity of the landslide varies between extremely slow velocity and very slow velocity according to Cruden and Varnes classification [21], depending on rainfall infiltration.
- Geometry of the slope: the landslide is located on a slope that faces east, with an average inclination of 25%.
- Period to be monitored: from early 2010 to middle 2015.
3.1.2. Selected SAR Datasets Parameters
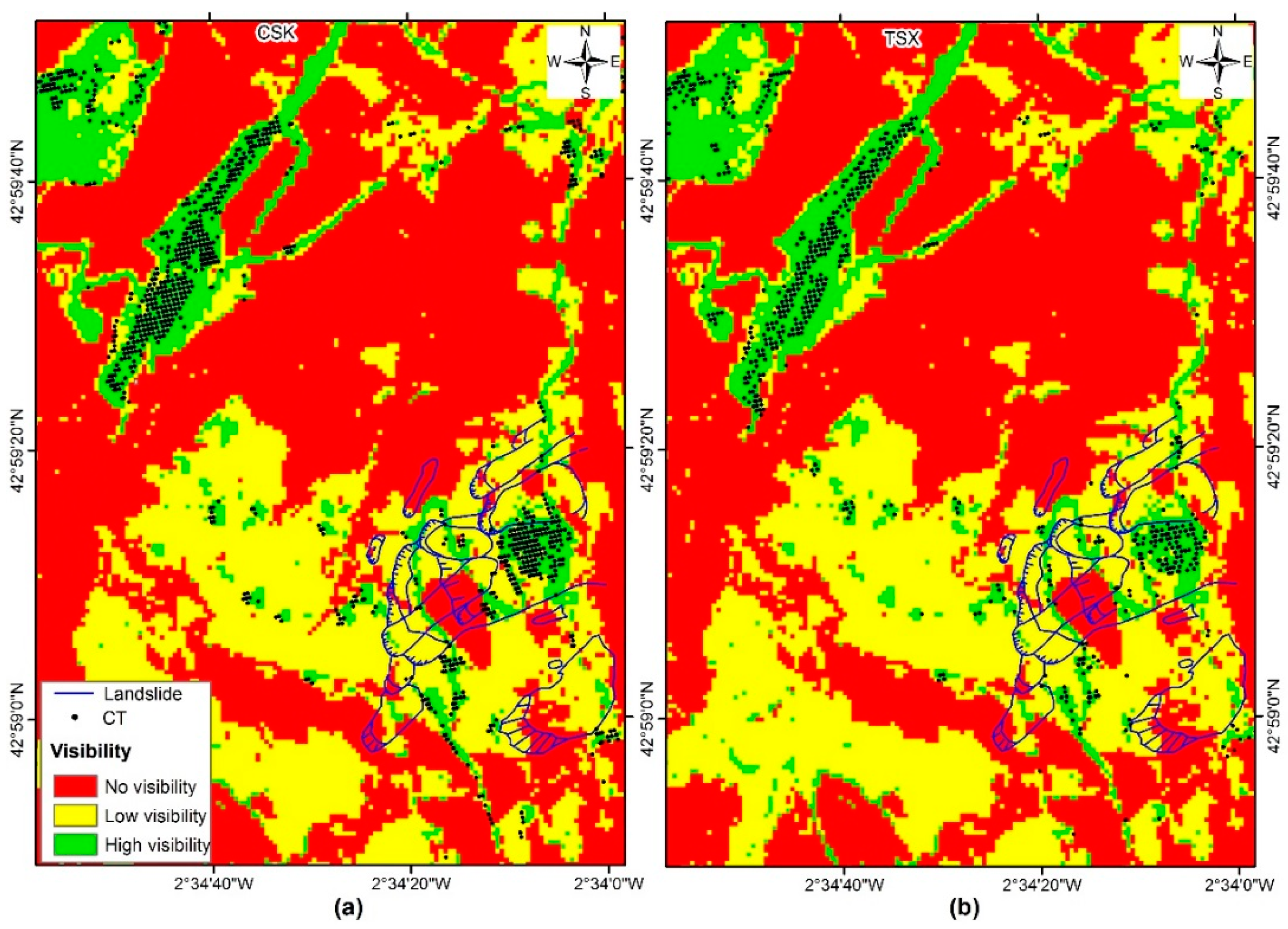
3.2. Visibility Analysis
3.2.1. Land Cover Classification
- LC-1: Urban (buildings, roads and bare ground). Coherence is expected to be very well preserved through time.
- LC-2: Grasslands. Coherence is expected to be poorly preserved.
- LC-3: Forest. Coherence is expected to be completely lost.
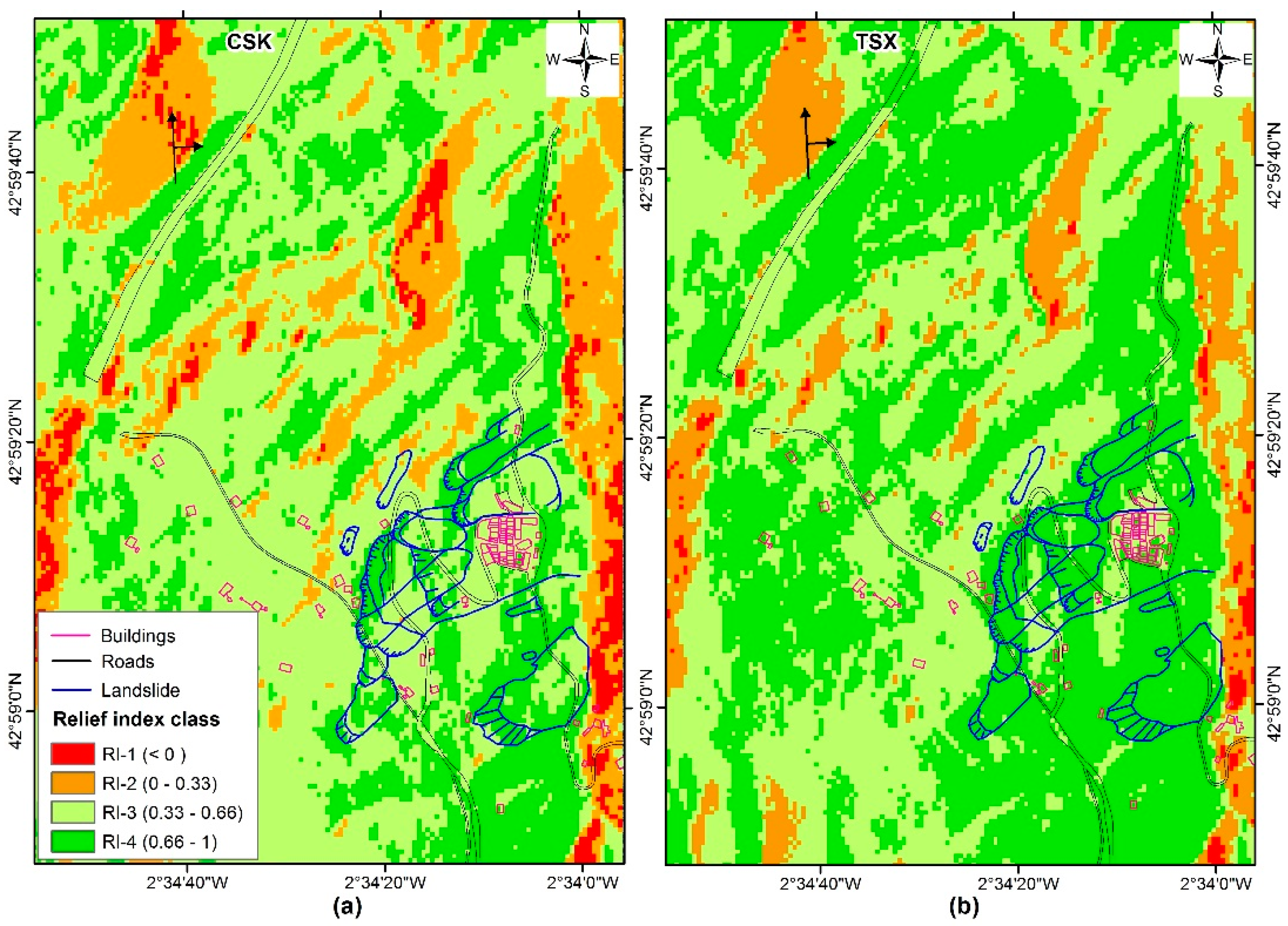
3.2.2. Geometrical Distortion (Relief Index) Classification
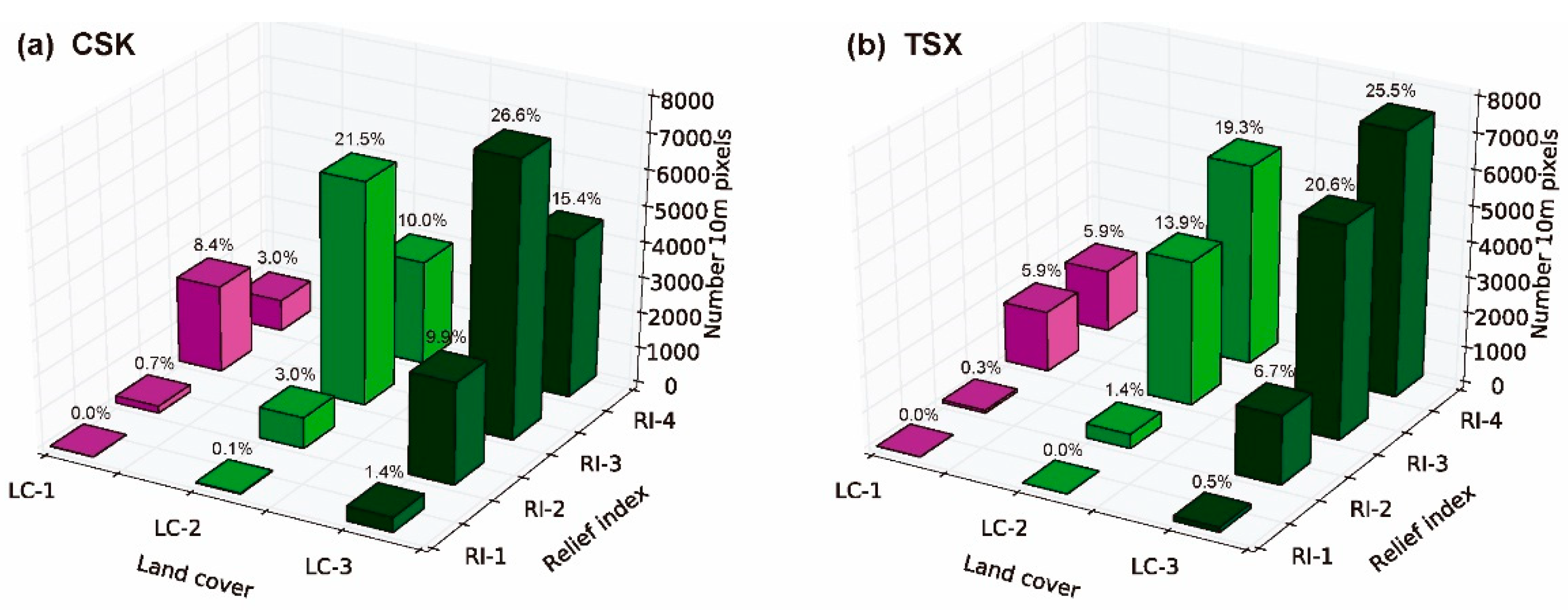
3.2.3. Land Cover and RI Classes’ Distribution
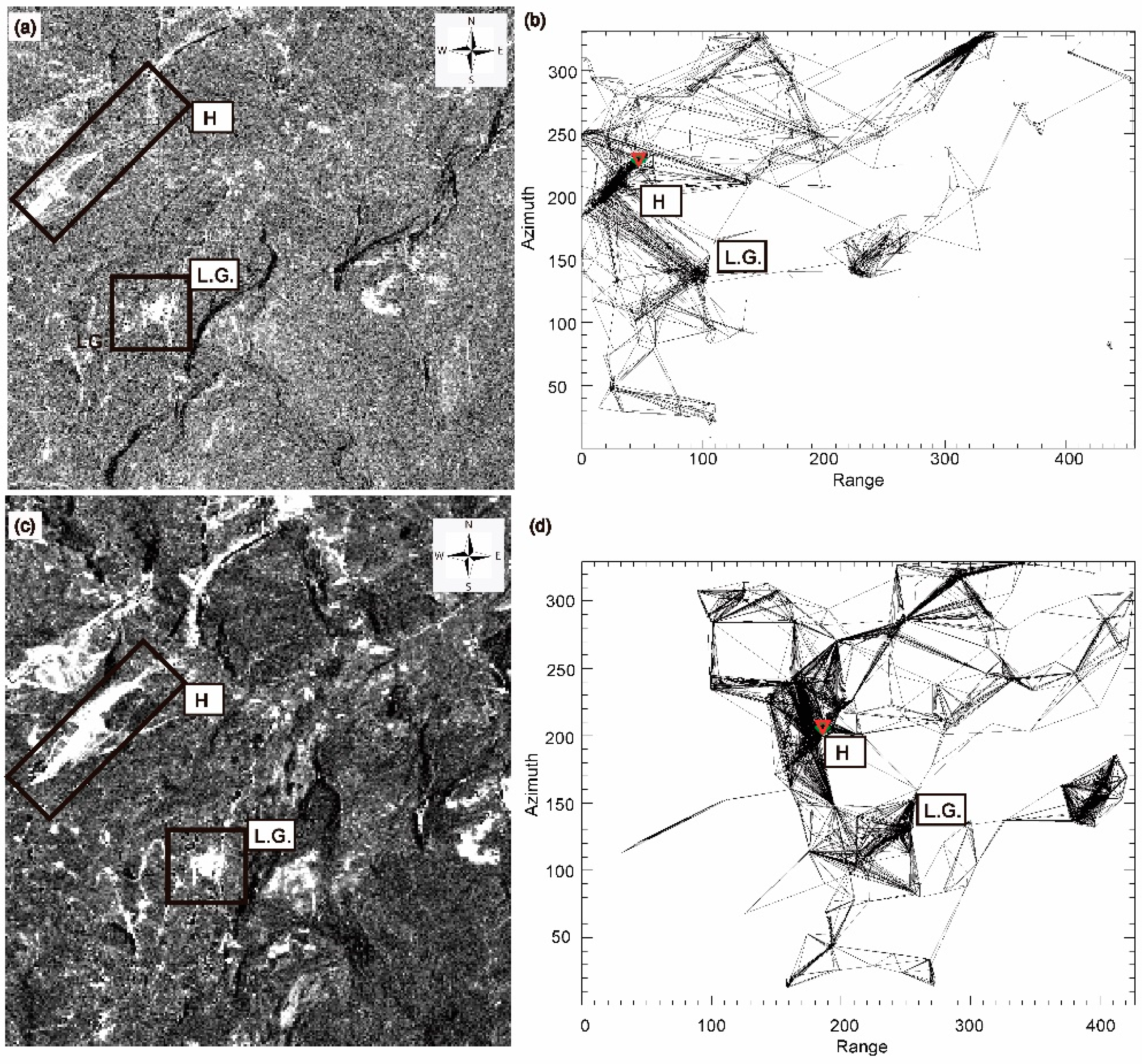
3.3. A-DInSAR Processing
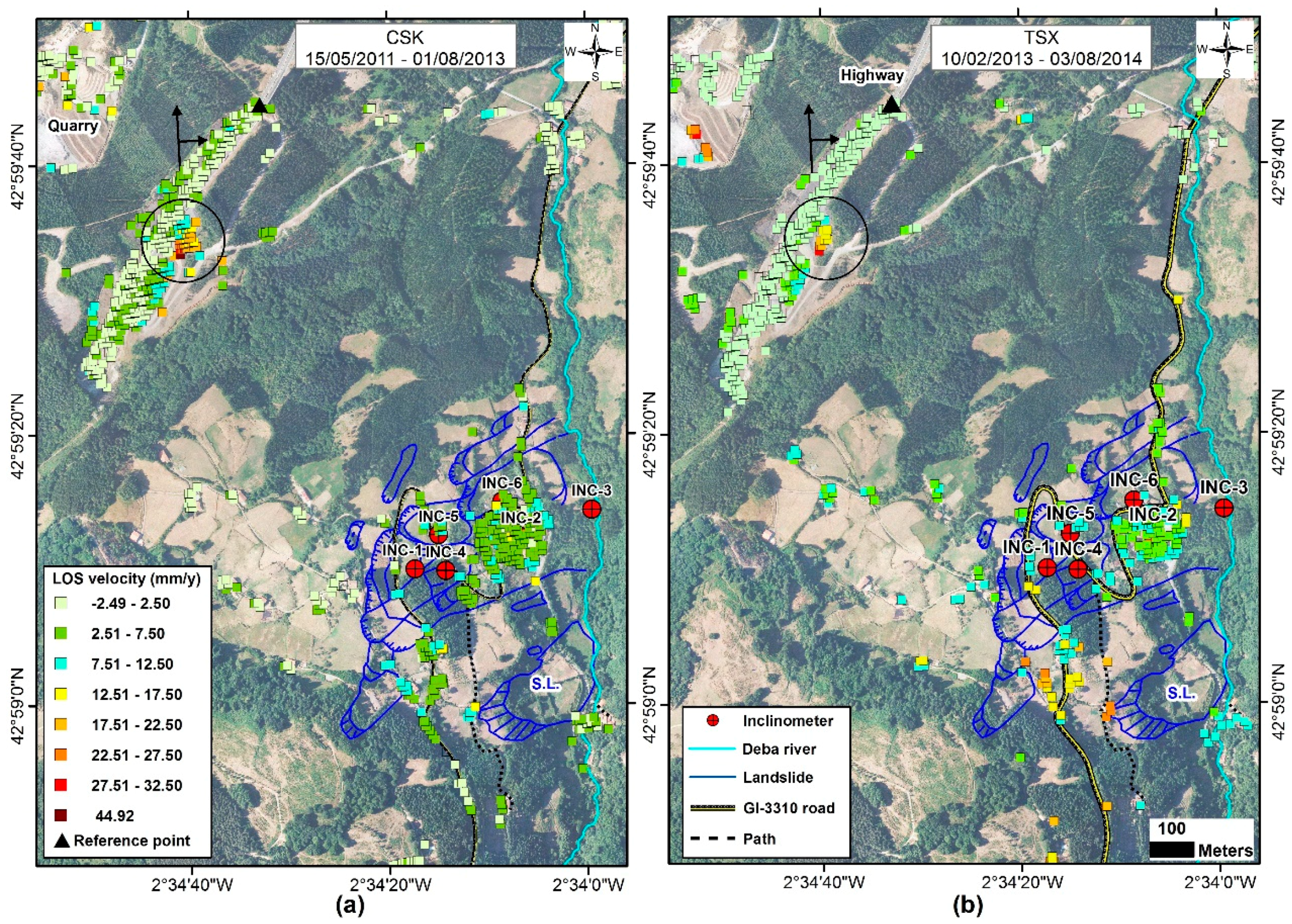
3.3.1. A-DInSAR Results
3.3.2. CT Detection Suitability Assessment
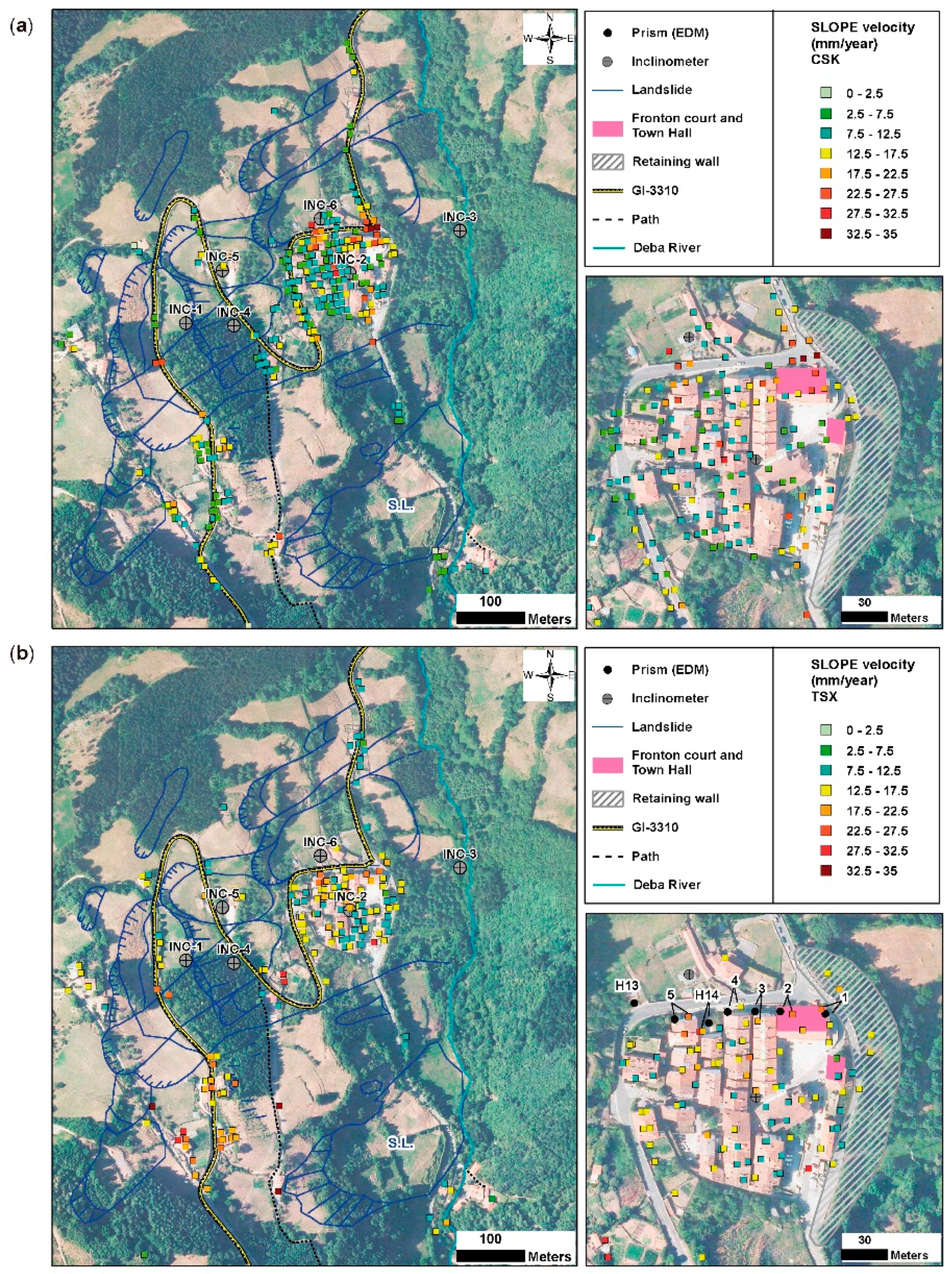
3.3.3. Post Processing Downslope Projection
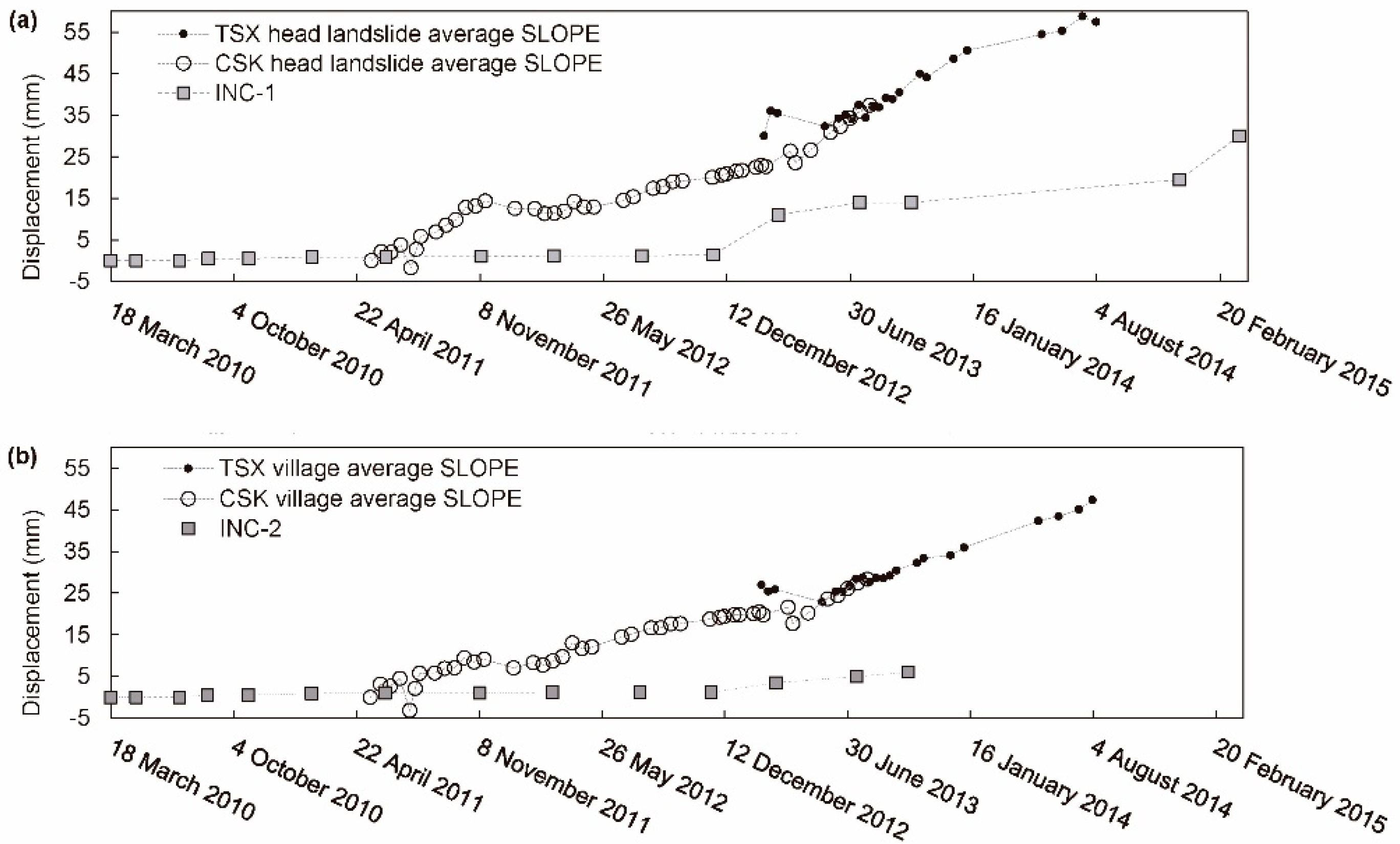
3.3.4. A-DInSAR Results Comparison to Ground Measurements
4. Discussion
5. Conclusions
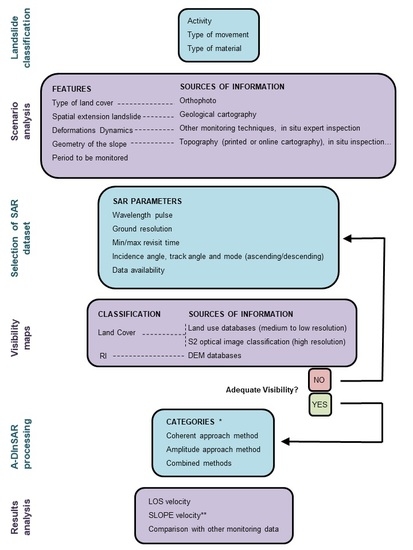
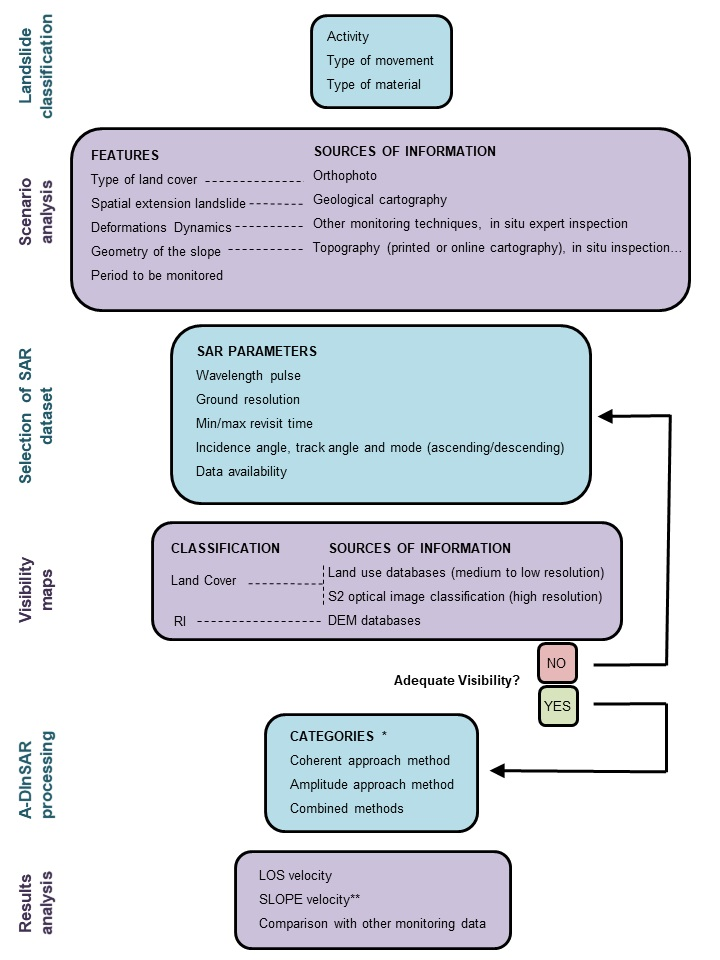
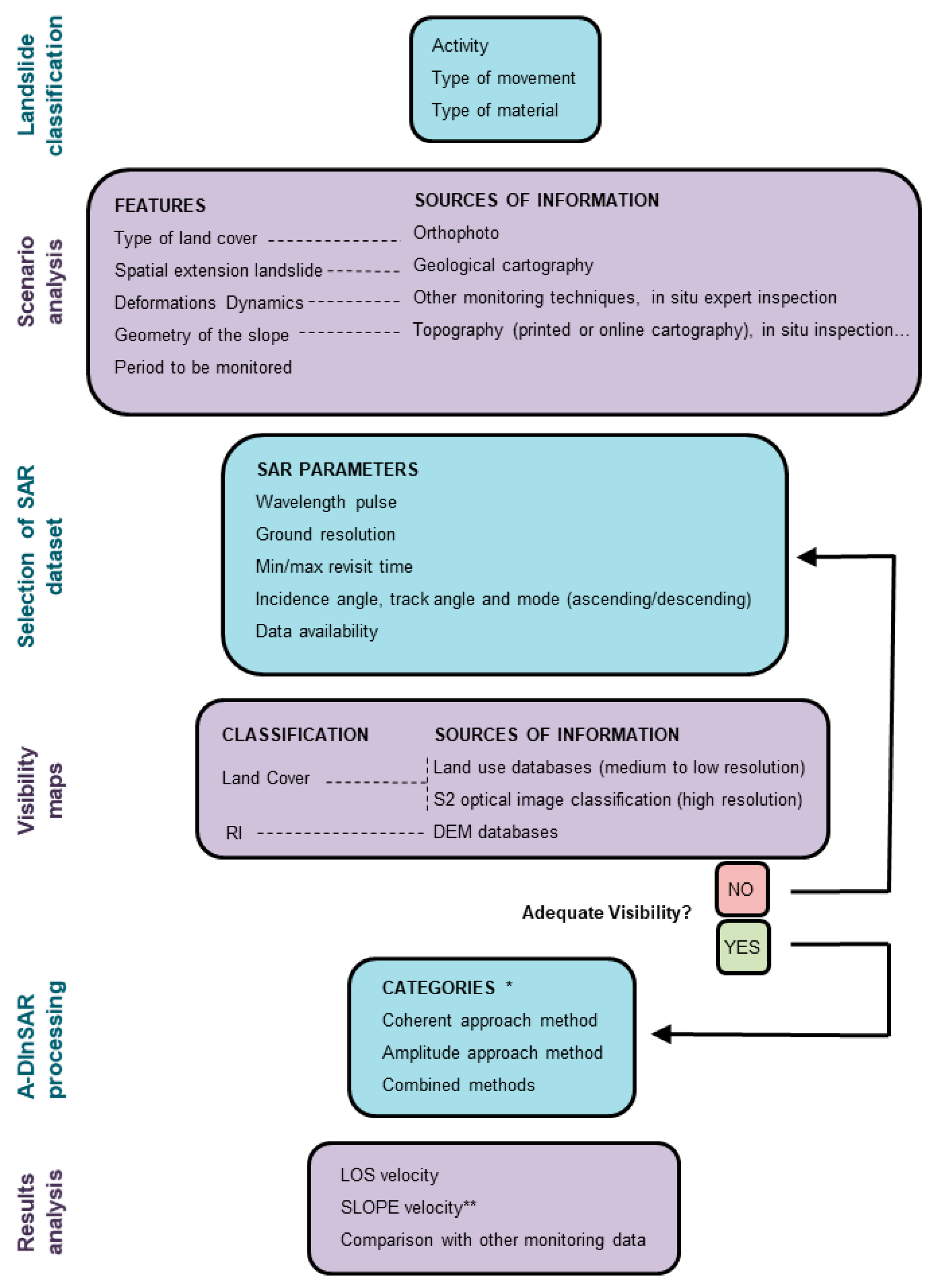
- A priori selection of the dataset according to the following aspects of the scenario:
- ○
- Type of land cover: will determine the radar sensor wavelength pulse selection.
- ○
- Spatial extent of the phenomena: will determine the minimum spatial resolution.
- ○
- Deformation dynamics: will determine the expected velocity and hence the wavelength pulse selection and minimum time between acquisitions.
- ○
- Geometry of the slope: will determine the acquisition mode of the SAR images.
- ○
- Period to be monitored: will determine if historical archives are needed (data availability) and to plan satellite data acquisition requests.
- Perform a qualitative visibility analysis of the selected SAR dataset with a GIS software, according to:
- ○
- Land cover: Use freely available S-2 optical image data to make supervised land cover classification. First identify the main classes of land cover according to the area of interest characteristics, the preservation of coherence among time or the amplitude reflectance (depending if SABS of PS approach are used) and the radar wavelength. We recommend using the higher resolution, closer to the ground resolution of the SAR data, and generating the multiband image (from which the supervised classification will be performed) with the maximum number of multispectral bands available.
- ○
- Relief geometrical distortion: Perform the relief index RI to detect geometrical distortions, using a DEM and the geometrical parameters of the SAR dataset
- Process the stack of SAR images with A-DInSAR: We have shown that performing a SBAS approach has the advantage of requiring less number of SAR images, which reduces the costs, although multilooking compromises the spatial resolution.
- Analyze the spatial distribution mean LOS velocity that will give information of the extension of the landslide, previously undetected unstable areas and differential movements.
- Perform the slope projection method if the movement occurs mainly along the steepest slope.
- When comparing and complementing A-DInSAR with other displacement monitoring data, take into account that A-DInSAR is measuring surface displacements; meanwhile other techniques, such as inclinometers, measure subsurface displacement at the rupture plane. If quantitative time series analysis is performed, all the data should be in the same projection. We must not forget that movements can be also masked by aliasing due to the sampling frequency.
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Bryant, E.A. Natural Hazards, 1st ed.; N. Y. Cambridge University Press: New York, NY, USA, 1991; pp. 1–12. ISBN 0-521-37295-X. [Google Scholar]
- UNEP/GRID-Geneva. Global Risk Data Platform. Available online: http://preview.grid.unep.ch (accessed on 18 February 2018).
- Gili, J.A.; Corominas, J.; Rius, J. Using Global Positioning System techniques in landslide monitoring. Eng. Geol. 2000, 55, 167–192. [Google Scholar] [CrossRef]
- Wieczorek, G.F.; Snyder, J.B. Monitoring slope movements. Geol. Monit. 2009, 245–271. [Google Scholar] [CrossRef]
- Calò, F.; Ardizzone, F.; Castaldo, R.; Lollino, P.; Tizzani, P.; Guzzetti, F.; Lanari, R.; Angeli, M.-G.; Pontoni, F.; Manunta, M. Enhanced landslide investigations through advanced DInSAR techniques: The Ivancich case study, Assisi, Italy. Remote Sens. Environ. 2014, 142, 69–82. [Google Scholar] [CrossRef]
- Hanssen, R.F. Radar Interferometry: Data Interpretation and Error Analysis; Springer Science & Business Media: Berlin, Germany, 2001; Volume 2. [Google Scholar]
- Casu, F.; Manzo, M.; Lanari, R. A quantitative assessment of the SBAS algorithm performance for surface deformation retrieval from DInSAR data. Remote Sens. Environ. 2006, 102, 195–210. [Google Scholar] [CrossRef]
- Lundgren, P.; Casu, F.; Manzo, M.; Pepe, A.; Berardino, P.; Sansosti, E.; Lanari, R. Gravity and magma induced spreading of Mount Etna volcano revealed by satellite radar interferometry. Geophys. Res. Lett. 2004, 31. [Google Scholar] [CrossRef]
- Manzo, M.; Ricciardi, G.; Casu, F.; Ventura, G.; Zeni, G.; Borgström, S.; Berardino, P.; Del Gaudio, C.; Lanari, R. Surface deformation analysis in the Ischia Island (Italy) based on spaceborne radar interferometry. J. Volcanol. Geotherm. Res. 2006, 151, 399–416. [Google Scholar] [CrossRef]
- Hilley, G.E.; Bürgmann, R.; Ferretti, A.; Novali, F.; Rocca, F. Dynamics of slow-moving landslides from permanent scatterer analysis. Science 2004, 304, 1952–1955. [Google Scholar] [CrossRef] [PubMed]
- Colesanti, C.; Wasowski, J. Investigating landslides with space-borne Synthetic Aperture Radar (SAR) interferometry. Eng. Geol. 2006, 88, 173–199. [Google Scholar] [CrossRef]
- Wasowski, J.; Bovenga, F. Investigating landslides and unstable slopes with satellite Multi Temporal Interferometry: Current issues and future perspectives. Eng. Geol. 2014, 174, 103–138. [Google Scholar] [CrossRef]
- Cascini, L.; Fornaro, G.; Peduto, D. Analysis at medium scale of low-resolution DInSAR data in slow-moving landslide-affected areas. ISPRS J. Photogramm. Remote Sens. 2009, 64, 598–611. [Google Scholar] [CrossRef]
- Iglesias, R.; Monells, D.; Centolanza, G.; Mallorquí, J.J.; Fabregas, X.; Aguasca, A. Landslide monitoring with spotlight TerraSAR-X DATA. In Proceedings of the 2012 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Munich, Germany, 22–27 July 2012; pp. 1298–1301. [Google Scholar]
- Iglesias, R.; Monells, D.; Centolanza, G.; Mallorqui, J.; Fabregas, X.; Aguasca, A. Down-slope combination of orbital and ground-based DInSAR for the efficient monitoring of slow-moving landslides. In Proceedings of the 10th European Conference on Synthetic Aperture Radar (EUSAR 2014), Berlin, Germany, 3–5 June 2014; pp. 1–4. [Google Scholar]
- Remondo, J.; González, A.; De Terán, J.R.D.; Cendrero, A.; Fabbri, A.; Chung, C.-J.F. Validation of landslide susceptibility maps; examples and applications from a case study in Northern Spain. Nat. Hazards 2003, 30, 437–449. [Google Scholar] [CrossRef]
- Ábalos, B.; Alkorta, A.; Iríbar, V. Geological and isotopic constraints on the structure of the Bilbao anticlinorium (Basque–Cantabrian basin, North Spain). J. Struct. Geol. 2008, 30, 1354–1367. [Google Scholar] [CrossRef]
- Euroestudios. Informe Geotécnico para Control del Deslizamiento Existente entre los PPKK 4,550-5,630 de la GI-3310 y Tramo Inicial de la GI-3681 en Leintz Gatzaga (Gipuzkoa); Euroestudios: Madrid, Spain, 2011; p. 119. [Google Scholar]
- Bru, G.; Gascón, B.; Camacho, A.; Prieto, J.F.; Mallorqui, J.; Morales, A.; Fernández, J. Deslizamiento de Leintz Gatzaga: Instrumentación geotécnica y monitorización del movimiento con técnicas terrestres y espaciales. Proyecto EOSLIDE. Ing. Civ. 2015, 180, 55–75. [Google Scholar]
- Euroestudios. Recopilacion de Informacion Geotécnica y Propuestas de Control Carretera GI-3681 en Leintz Gatzaga (Gipuzkoa); Euroestudios: Madrid, Spain, 2009; p. 196. [Google Scholar]
- Cruden, D.M.; Varnes, D.J. Landslides: Investigation and mitigation. Chapter 3: Landslide types and processes. Transportation Research Board Special Report, 15 July 1996. [Google Scholar]
- Fell, R. Landslide risk assessment and acceptable risk. Can. Geotech. J. 1994, 31, 261–272. [Google Scholar] [CrossRef]
- Osmanoğlu, B.; Sunar, F.; Wdowinski, S.; Cabral-Cano, E. Time series analysis of InSAR data: Methods and trends. ISPRS J. Photogramm. Remote Sens. 2016, 115, 90–102. [Google Scholar] [CrossRef]
- Farina, P.; Colombo, D.; Fumagalli, A.; Marks, F.; Moretti, S. Permanent Scatterers for landslide investigations: Outcomes from the ESA-SLAM project. Eng. Geol. 2006, 88, 200–217. [Google Scholar] [CrossRef]
- Colombo, A.; Mallen, L.; Pispico, R.; Giannico, C.; Bianchi, M.; Savio, G. Mappatura regionale delle aree monitorabili mediante l’uso della tecnica PS. In Proceedings of the 10 National Conference ASITA, Bolzano, Italy, 14–17 November 2006. ISBN/ISSN:88-900943-0-3-2006. [Google Scholar]
- Notti, D.; Meisina, C.; Zucca, F.; Colombo, A. Models to predict Persistent Scatterers data distribution and their capacity to register movement along the slope. In Proceedings of the Fringe 2011 Workshop, ESRIN SP-697, Frascati, Italy, 19–23 September 2011; pp. 17–23. [Google Scholar]
- Plank, S.; Singer, J.; Minet, C.; Thuro, K. Pre-survey suitability evaluation of the differential synthetic aperture radar interferometry method for landslide monitoring. Int. J. Remote Sens. 2012, 33, 6623–6637. [Google Scholar] [CrossRef]
- Plank, S.; Singer, J.; Thuro, K. Assessment of number and distribution of persistent scatterers prior to radar acquisition using open access land cover and topographical data. ISPRS J. Photogramm. Remote Sens. 2013, 85, 132–147. [Google Scholar] [CrossRef]
- Strozzi, T.; Farina, P.; Corsini, A.; Ambrosi, C.; Thüring, M.; Zilger, J.; Wiesmann, A.; Wegmüller, U.; Werner, C. Survey and monitoring of landslide displacements by means of L-band satellite SAR interferometry. Landslides 2005, 2, 193–201. [Google Scholar] [CrossRef]
- IGN. Ortophoto PNOA, Sheet No. 0112, 2017. Available online: http://ign.es (accessed on 25 October 2017).
- Diputación Foral de Gipuzkoa. Cadastre. Available online: http://www4.gipuzkoa.net/ogasuna/catastro/presenta.asp (accessed on 10 September 2017).
- Sansosti, E.; Berardino, P.; Bonano, M.; Calò, F.; Castaldo, R.; Casu, F.; Manunta, M.; Manzo, M.; Pepe, A.; Pepe, S. How second generation SAR systems are impacting the analysis of ground deformation. Int. J. Appl. Earth Obs. Geoinf. 2014, 28, 1–11. [Google Scholar] [CrossRef]
- Cascini, L.; Fornaro, G.; Peduto, D.; Ferlisi, S.; Di Nocera, S. A new approach to the use of DinSAR data to study slow-moving landslides over large areas. In Proceedings of the Fringe 2009 Workshop, Frascati, Italy, 30 November–4 December 2010. [Google Scholar]
- Ferretti, A.; Fumagalli, A.; Novali, F.; Prati, C.; Rocca, F.; Rucci, A. A new algorithm for processing interferometric data-stacks: SqueeSAR. IEEE Trans. Geosci. Remote Sens. 2011, 49, 3460–3470. [Google Scholar] [CrossRef]
- García-Davalillo, J.C.; Herrera, G.; Notti, D.; Strozzi, T.; Álvarez-Fernández, I. DInSAR analysis of ALOS PALSAR images for the assessment of very slow landslides: The Tena Valley case study. Landslides 2014, 11, 225–246. [Google Scholar] [CrossRef]
- Herrera, G.; Gutiérrez, F.; García-Davalillo, J.; Guerrero, J.; Notti, D.; Galve, J.; Fernández-Merodo, J.; Cooksley, G. Multi-sensor advanced DInSAR monitoring of very slow landslides: The Tena Valley case study (Central Spanish Pyrenees). Remote Sens. Environ. 2013, 128, 31–43. [Google Scholar] [CrossRef]
- Borràs, J.; Delegido, J.; Pezzola, A.; Pereira, M.; Morassi, G.; Camps-Valls, G. Clasificación de usos del suelo a partir de imágenes Sentinel-2. In Revista de Teledetección; Universitat Politècnica de València: València, Spain, 2017; pp. 55–66. [Google Scholar]
- Mather, P.M.; Koch, M. Computer Processing of Remotely-Sensed Images: An Introduction; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- Cohen, J. A coefficient of agreement for nominal scales. Educ. Psychol. Meas. 1960, 20, 37–46. [Google Scholar] [CrossRef]
- Foody, G.M. Thematic map comparison. Photogramm. Eng. Remote Sens. 2004, 70, 627–633. [Google Scholar] [CrossRef]
- Sansosti, E. A simple and exact solution for the interferometric and stereo SAR geolocation problem. IEEE Trans. Geosci. Remote Sens. 2004, 42, 1625–1634. [Google Scholar] [CrossRef]
- Ferretti, A.; Monti-Guarnieri, A.; Prati, C.; Rocca, F.; Massonet, D. InSAR Principles—Guidelines for SAR Interferometry Processing and Interpretation; European Space Reseach and Technology Centre (ESTEC): Noordwijk, The Netherlands, 2007; Volume 19. [Google Scholar]
- Notti, D.; Davalillo, J.; Herrera, G.; Mora, O. Assessment of the performance of X-band satellite radar data for landslide mapping and monitoring: Upper Tena Valley case study. Nat. Hazards Earth Syst. Sci. 2010, 10, 1865–1875. [Google Scholar] [CrossRef]
- Cigna, F.; Bateson, L.B.; Jordan, C.J.; Dashwood, C. Simulating SAR geometric distortions and predicting Persistent Scatterer densities for ERS-1/2 and ENVISAT C-band SAR and InSAR applications: Nationwide feasibility assessment to monitor the landmass of Great Britain with SAR imagery. Remote Sens. Environ. 2014, 152, 441–466. [Google Scholar] [CrossRef]
- Bianchini, S.; Herrera, G.; Mateos, R.M.; Notti, D.; Garcia, I.; Mora, O.; Moretti, S. Landslide activity maps generation by means of Persistent Scatterer Interferometry. Remote Sens. 2013, 5, 6198–6222. [Google Scholar] [CrossRef]
- IGN. Digital Elevation Model, LIDAR 5m, Sheet No. 0112. Available online: http://ign.es (accessed on 5 May 2017).
- Ferretti, A.; Prati, C.; Rocca, F. Permanent scatterers in SAR interferometry. IEEE Trans. Geosci. Remote Sens. 2001, 39, 8–20. [Google Scholar] [CrossRef]
- Berardino, P.; Fornaro, G.; Lanari, R.; Sansosti, E. A new algorithm for surface deformation monitoring based on small baseline differential SAR interferograms. IEEE Trans. Geosci. Remote Sens. 2002, 40, 2375–2383. [Google Scholar] [CrossRef]
- Mora, O.; Mallorqui, J.J.; Broquetas, A. Linear and non-linear terrain deformation maps from a reduced set of interferometric SAR images. IEEE Trans. Geosci. Remote Sens. 2003, 41, 2243–2253. [Google Scholar] [CrossRef]
- Lanari, R.; Mora, O.; Manunta, M.; Mallorqui, J.J.; Berardino, P.; Sansosti, E. A small baseline DInSAR approach for investigating deformations on full resolution SAR interferograms. IEEE Trans. Geosci. Remote Sens. 2004, 42, 1377–1386. [Google Scholar] [CrossRef]
- Blanco, P.; Mallorqui, J.J.; Duque, S.; Monells, D. The Coherent Pixels Technique (CPT): An advanced DInSAR technique for nonlinear deformation monitoring. Pure Appl. Geophys. 2008, 165, 1167–1193. [Google Scholar] [CrossRef]
- Iglesias, R.; Aguasca, A.; Fabregas, X.; Mallorqui, J.J.; Monells, D.; López-Martínez, C.; Pipia, L. Ground-Based Polarimetric SAR Interferometry for the Monitoring of Terrain Displacement Phenomena–Part I: Theoretical Description. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 980–993. [Google Scholar] [CrossRef]
- Barra, A.; Solari, L.; Béjar-Pizarro, M.; Monserrat, O.; Bianchini, S.; Herrera, G.; Crosetto, M.; Sarro, R.; González-Alonso, E.; Mateos, R.M. A Methodology to Detect and Update Active Deformation Areas Based on Sentinel-1 SAR Images. Remote Sens. 2017, 9, 1002. [Google Scholar] [CrossRef]
- Cascini, L.; Fornaro, G.; Peduto, D. Advanced low-and full-resolution DInSAR map generation for slow-moving landslide analysis at different scales. Eng. Geol. 2010, 112, 29–42. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor | CSK | TSX |
|---|---|---|
| Number of images | 43 | 22 |
| Acquisition orbit | Ascending | Ascending |
| Acquisition mode | Stripmap HIMAGE | High Resolution Spotlight (HS) |
| Polarization | HH | HH |
| Temporal interval | 15 May 2011 to 1 August 2013 | 10 February 2013 to 3 August 2014 |
| Minimum revisit time (days) | 7 | 11 |
| Maximum revisit time (days) | 48 | 121 |
| Incidence angle (°) | 27 | 35 |
| Tracking angle (°) | 348 | 350 |
| Ground projected resolution (Azimut × Range) | 2.2 m × 2.2 m | 0.9 m × 1.6 m |
| Multilook factor applied (Azimuth × Range) | 5 × 5 | 13 × 7 |
| Ground resolution with ML | ≈10 m × 10 m | ≈10 m × 10 m |
| LC Class Distribution (%) of the Studied Scene | Detected CTs (%) for Each LC Class | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| CSK (926 CTs) | TSX (658 CTs) | |||||||||||
| Cell Resolution (m) | S2 Image | Bands Combination | Kappa Coefficient | LC-1 | LC-2 | LC-3 | LC-1 | LC-2 | LC-3 | LC-1 | LC-2 | LC-3 |
| 10 (29,088 pixels) | 22 August 2017 | 3,4,2 | 0.69 | 16.2 | 33.6 | 50.2 | 85.1 | 12.1 | 2.8 | 88.8 | 7.8 | 3.5 |
| 2,3,4,8 | 0.785 | 16.6 | 30.8 | 52.6 | 85.2 | 11.4 | 3.3 | 89.7 | 6.8 | 3.5 | ||
| 20 August 2017 | 3,4,2 | 0.807 | 12.6 | 35.9 | 51.5 | 79.6 | 18.6 | 1.8 | 82.8 | 14.1 | 3 | |
| 2,3,4,8 | 0.813 | 12.1 | 34.6 | 53.3 | 79.9 | 17.5 | 2.6 | 86.6 | 10.9 | 2.4 | ||
| 20 (7373 pixels) | 22 April 2017 | 3,4,2 | 0.63 | 16.2 | 34.4 | 49.4 | 83.9 | 13.3 | 2.8 | 86.6 | 10.6 | 2.7 |
| 2,3,4,8A | 0.694 | 18.9 | 28.9 | 52.2 | 87.7 | 8.7 | 3.6 | 90.1 | 7.3 | 2.6 | ||
| 5,4,2 | 0.652 | 16.8 | 33.5 | 49.7 | 84.7 | 12.3 | 3 | 89.1 | 8.1 | 2.9 | ||
| 7,4,2 | 0.666 | 17.6 | 29.4 | 53 | 84.7 | 10.7 | 4.6 | 88 | 8.1 | 4 | ||
| 2,3,4,5,6,7,8A,11,12 | 0.75 | 21 | 28.5 | 50.5 | 95.5 | 3.3 | 1.2 | 94.4 | 4.1 | 1.5 | ||
| 20 August 2017 | 3,4,2 | 0.697 | 13.5 | 35.6 | 50.9 | 81.4 | 16.4 | 2.2 | 87.8 | 10.6 | 1.5 | |
| 2,3,4,8A | 0.688 | 12.9 | 36 | 51.1 | 80.1 | 17.6 | 2.3 | 86.5 | 12.3 | 1.2 | ||
| 5,4,2 | 0.705 | 13.6 | 36.1 | 50.3 | 79.8 | 18 | 2.2 | 85.4 | 11.9 | 2.7 | ||
| 7,4,2 | 0.681 | 12.8 | 35.9 | 51.3 | 78 | 20 | 2 | 85.6 | 13.4 | 1.1 | ||
| 2,3,4,5,6,7,8A,11,12 | 0.754 | 17.8 | 28.8 | 53.4 | 90.9 | 5.9 | 3.1 | 93 | 4.6 | 2.4 | ||
| Ave. | 15.6 | 33.0 | 51.4 | 84.0 | 13.3 | 2.7 | 88.2 | 9.3 | 2.5 | |||
| Max. | 21.0 | 36.1 | 53.4 | 95.5 | 20.0 | 4.6 | 94.4 | 14.1 | 4.0 | |||
| Min. | 12.1 | 28.5 | 49.4 | 78.0 | 3.3 | 1.2 | 82.8 | 4.1 | 1.1 | |||
| RI Class Distribution (%) of the Studied Scene | ||||||||
|---|---|---|---|---|---|---|---|---|
| Cell resolution (m) | CSK geometry | TSX geometry | ||||||
| RI-1 | RI-2 | RI-3 | RI-4 | RI-1 | RI-2 | RI-3 | RI-4 | |
| 10 | 1.5 | 13.6 | 56.5 | 28.4 | 0.5 | 8.4 | 40.3 | 50.8 |
| 20 | 1.6 | 13.5 | 56.4 | 28.2 | 0.6 | 8.7 | 40 | 50.7 |
| Detected CT (%) for each RI class | ||||||||
| CSK dataset (926 CT) | TSX dataset (658 CT) | |||||||
| RI-1 | RI-2 | RI-3 | RI-4 | RI-1 | RI-2 | RI-3 | RI-4 | |
| 10 | 0 | 1.1 | 74.9 | 24 | 0 | 0.3 | 54.9 | 44.8 |
| 20 | 0 | 0.6 | 76.3 | 23 | 0 | 0.2 | 52.1 | 47.4 |
| Studied Scene Cell Resolution | CSK CT Distribution (%) | TSX CT Distribution (%) | |||||||
|---|---|---|---|---|---|---|---|---|---|
| RI-1 | RI-2 | RI-3 | RI-4 | RI-1 | RI-2 | RI-3 | RI-4 | ||
| 10 m | LC-1 | 0.0 | 2.8 | 21.1 | 16.0 | 0.0 | 1.6 | 17.2 | 11.5 |
| LC-2 | 0.0 | 0.3 | 1.4 | 1.7 | 0.0 | 0.1 | 0.5 | 0.8 | |
| LC-3 | 0.0 | 0.0 | 0.2 | 0.2 | 0.0 | 0.0 | 0.3 | 0.4 | |
| RI-1 | RI-2 | RI-3 | RI-4 | RI-1 | RI-2 | RI-3 | RI-4 | ||
| 20 m | LC-1 | 0.0 | 6.6 | 77.7 | 57.3 | 0.0 | 3.2 | 60.3 | 44.1 |
| LC-2 | 0.0 | 0.0 | 5.6 | 4.4 | 0.0 | 0.0 | 1.6 | 3.2 | |
| LC-3 | 0.0 | 0.1 | 0.7 | 1.0 | 0.0 | 0.0 | 0.4 | 0.5 | |
| RI-1 | RI-2 | RI-3 | RI-4 | |
|---|---|---|---|---|
| LC-1 | NV | LV | HV | HV |
| LC-2 | NV | NV | LV | LV |
| LC-3 | NV | NV | NV | NV |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bru, G.; Escayo, J.; Fernández, J.; Mallorqui, J.J.; Iglesias, R.; Sansosti, E.; Abajo, T.; Morales, A. Suitability Assessment of X-Band Satellite SAR Data for Geotechnical Monitoring of Site Scale Slow Moving Landslides. Remote Sens. 2018, 10, 936. https://doi.org/10.3390/rs10060936
Bru G, Escayo J, Fernández J, Mallorqui JJ, Iglesias R, Sansosti E, Abajo T, Morales A. Suitability Assessment of X-Band Satellite SAR Data for Geotechnical Monitoring of Site Scale Slow Moving Landslides. Remote Sensing. 2018; 10(6):936. https://doi.org/10.3390/rs10060936
Chicago/Turabian StyleBru, Guadalupe, Joaquin Escayo, José Fernández, Jordi J. Mallorqui, Rubén Iglesias, Eugenio Sansosti, Tamara Abajo, and Antonio Morales. 2018. "Suitability Assessment of X-Band Satellite SAR Data for Geotechnical Monitoring of Site Scale Slow Moving Landslides" Remote Sensing 10, no. 6: 936. https://doi.org/10.3390/rs10060936
APA StyleBru, G., Escayo, J., Fernández, J., Mallorqui, J. J., Iglesias, R., Sansosti, E., Abajo, T., & Morales, A. (2018). Suitability Assessment of X-Band Satellite SAR Data for Geotechnical Monitoring of Site Scale Slow Moving Landslides. Remote Sensing, 10(6), 936. https://doi.org/10.3390/rs10060936