Fast and Automatic Data-Driven Thresholding for Inundation Mapping with Sentinel-2 Data


 , ,
, ,  and
and 
Abstract
1. Introduction
- Radar-based approaches proposed in the literature rely on the specular behavior of the free water surface and its high dielectric constant; thus, very little backscatter is returned to the satellite sensor [1]. Gray-level thresholding is the most prevalent approach. In this context, all pixels with a backscatter lower than a specified threshold in an intensity image are mapped as water [4]. Issues arise with shadow areas or forward scattering sandy soils. Another approach to map surface waters is using active contour models, which exploit local tone and texture measures to delineate flood extension [5,6]. However, emergent vegetation [7,8] and/or waves [9] increase the amount of backscattered radiation from flooded surfaces to the satellite, making the delineation between water and land more difficult.
- In optical images, several methods have been used to detect water bodies by applying thresholds to one or more spectral bands or indices [10,11,12,13]. Commonly applied indices include the Normalized Difference Water Index (NDWI) [11,12,13] and the Modified NDWI [10,12,13], whose estimation relies on green and near-infrared or short-wave infrared bands. Other approaches rely on machine-learning algorithms to extract water bodies from optical imagery. Prevalent supervised classification algorithms that have been used include Random Forests [14,15], neural networks [16], decision trees [17], support vector machines [18,19] and the perceptron model [20]. Classification-based approaches may achieve higher accuracy than thresholding methods; however, ground truth data are required to select appropriate training samples.
- Global approaches [23] estimate thresholds based on the histogram analysis of the complete image. The capability of a global thresholding algorithm to detect an optimal histogram threshold may be unsatisfying when the class proportions within the image are imbalanced [29]. Additionally, the water and non-water class distributions may be quite different when considering the complete image compared to image subsets [27], and this may hamper the ability to detect an optimal global threshold for the complete area.
- Local thresholding approaches separate image into subsets and estimate local thresholds for subsets containing large portions of pixels belonging to the water and non-water classes, and these thresholds may be combined to estimate an overall threshold. Several of the methods rely on image subsets of fixed size [24,26,27,28] to estimate local thresholds, while there is a limited number of recent approaches that adapt the size of the subregions to the information content retrieved from the image [22,29]. The approach in Chini et al. [29] estimates subregions of variable size, which allow the parameterization of the distribution of water and non-water classes, while the approach in Nakmuenwai et al. [22] selects subregions of elliptical shape having a water and non-water cover ratio of nearly 1:1.
2. Materials and Methods
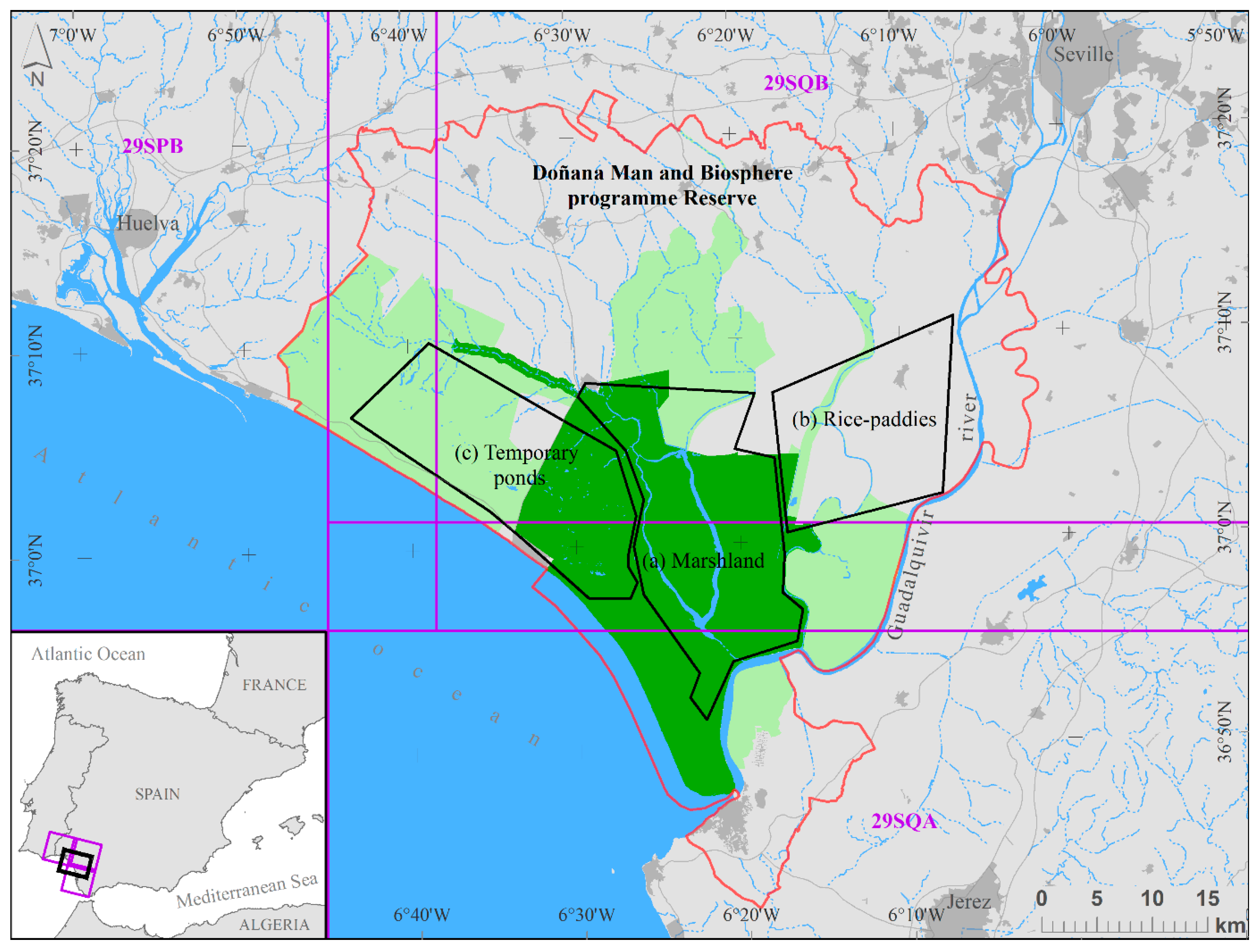
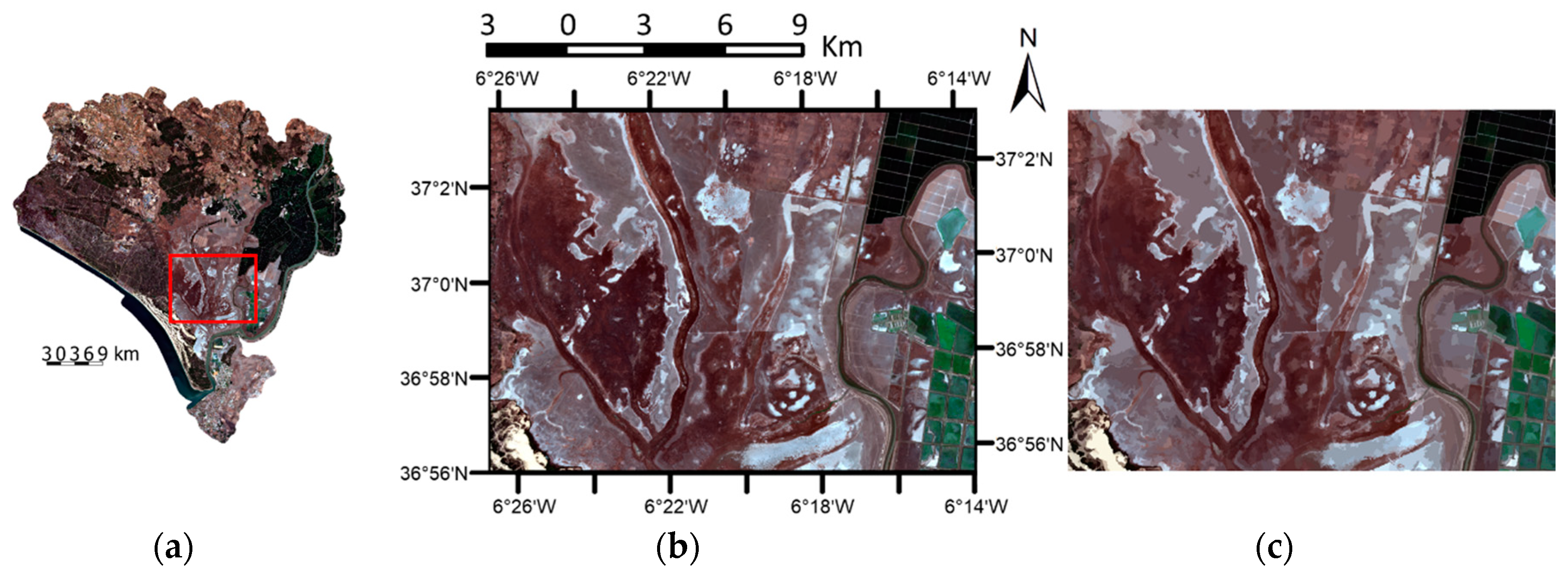
2.1. Study Area
2.2. Satellite Imagery
Preprocessing of Sentinel-2 Data
2.3. Ground Truth Data
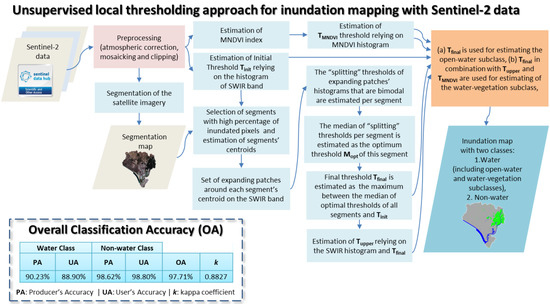
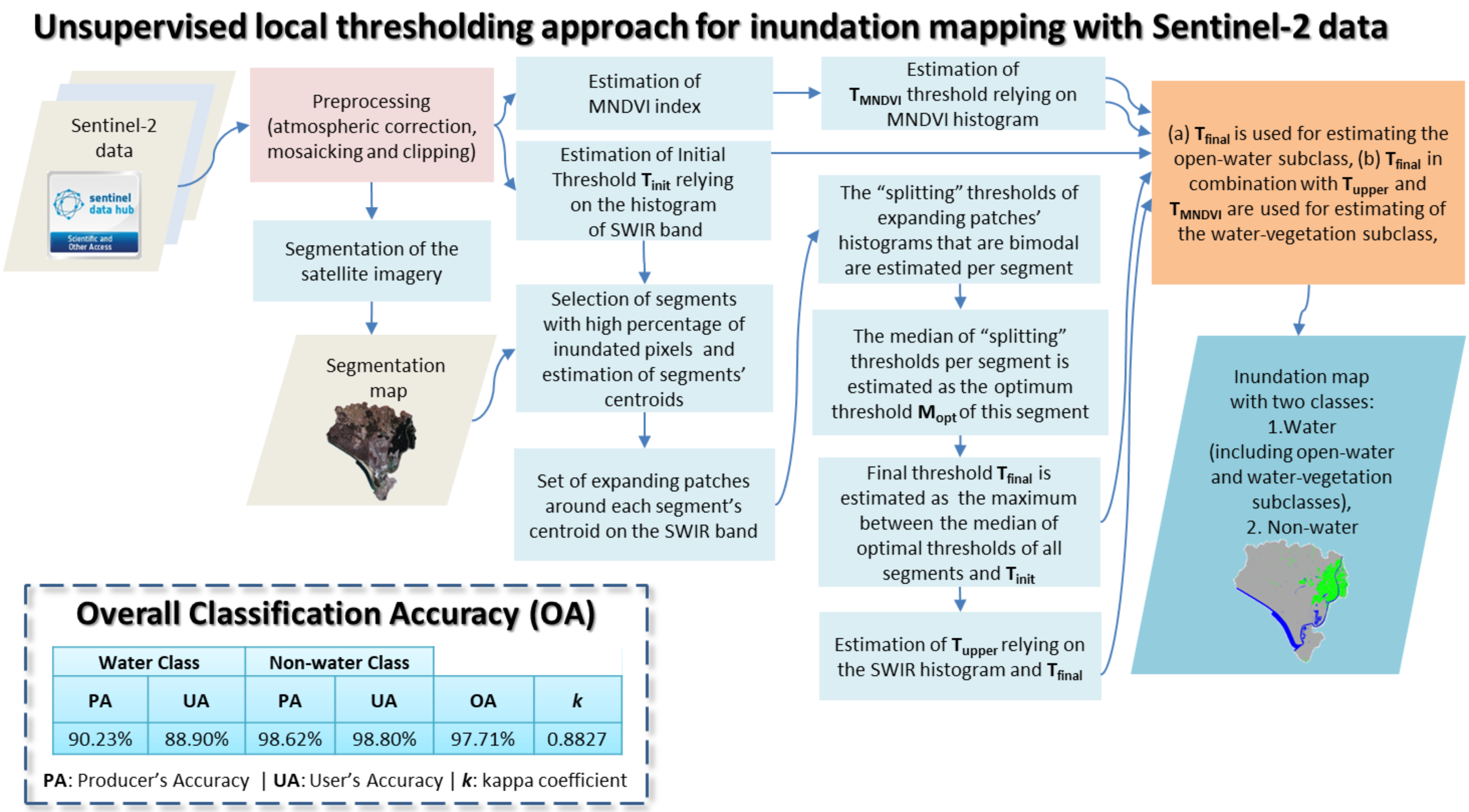
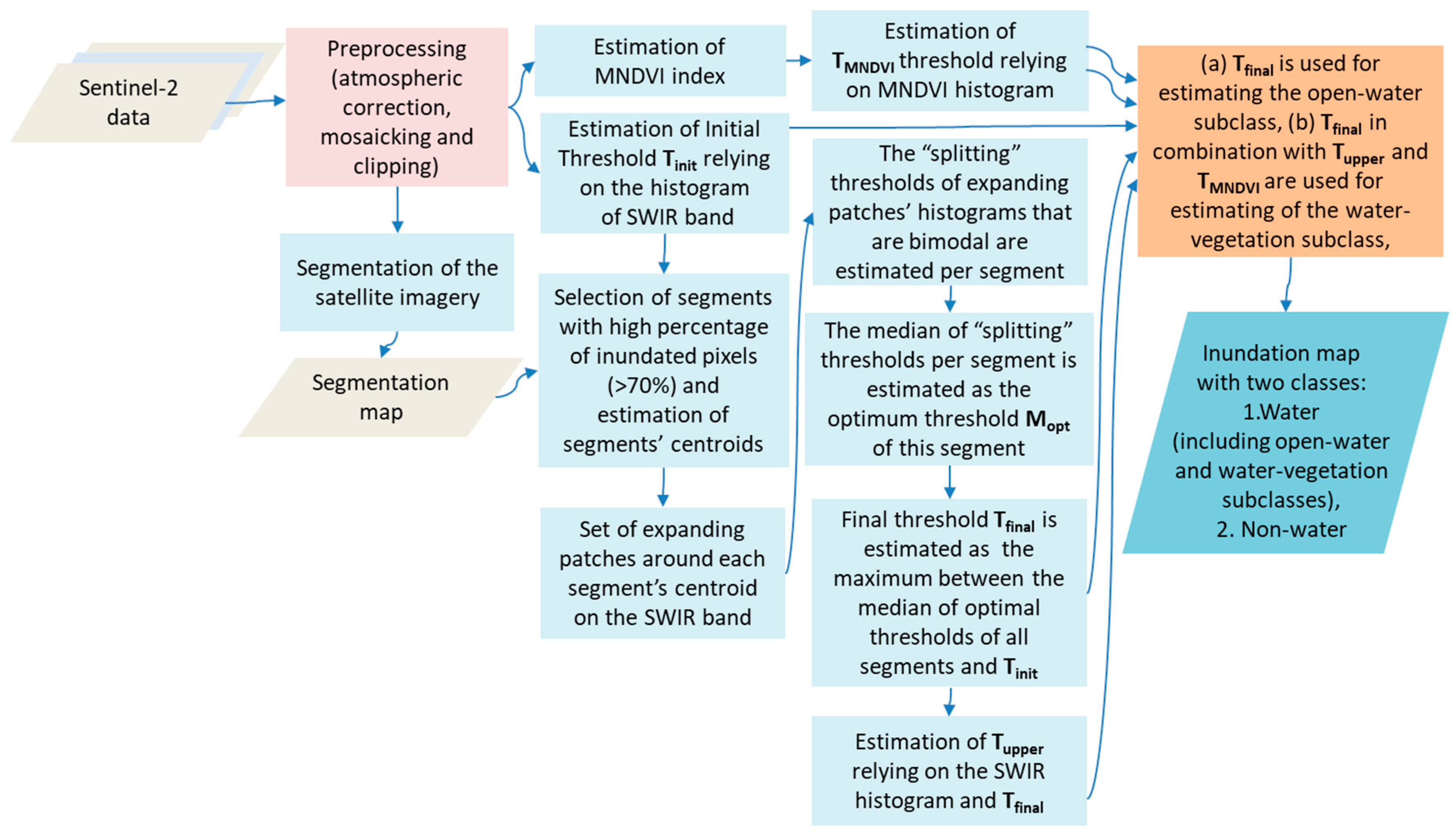
2.4. Unsupervised Approach
2.4.1. Segmentation of the Satellite Image
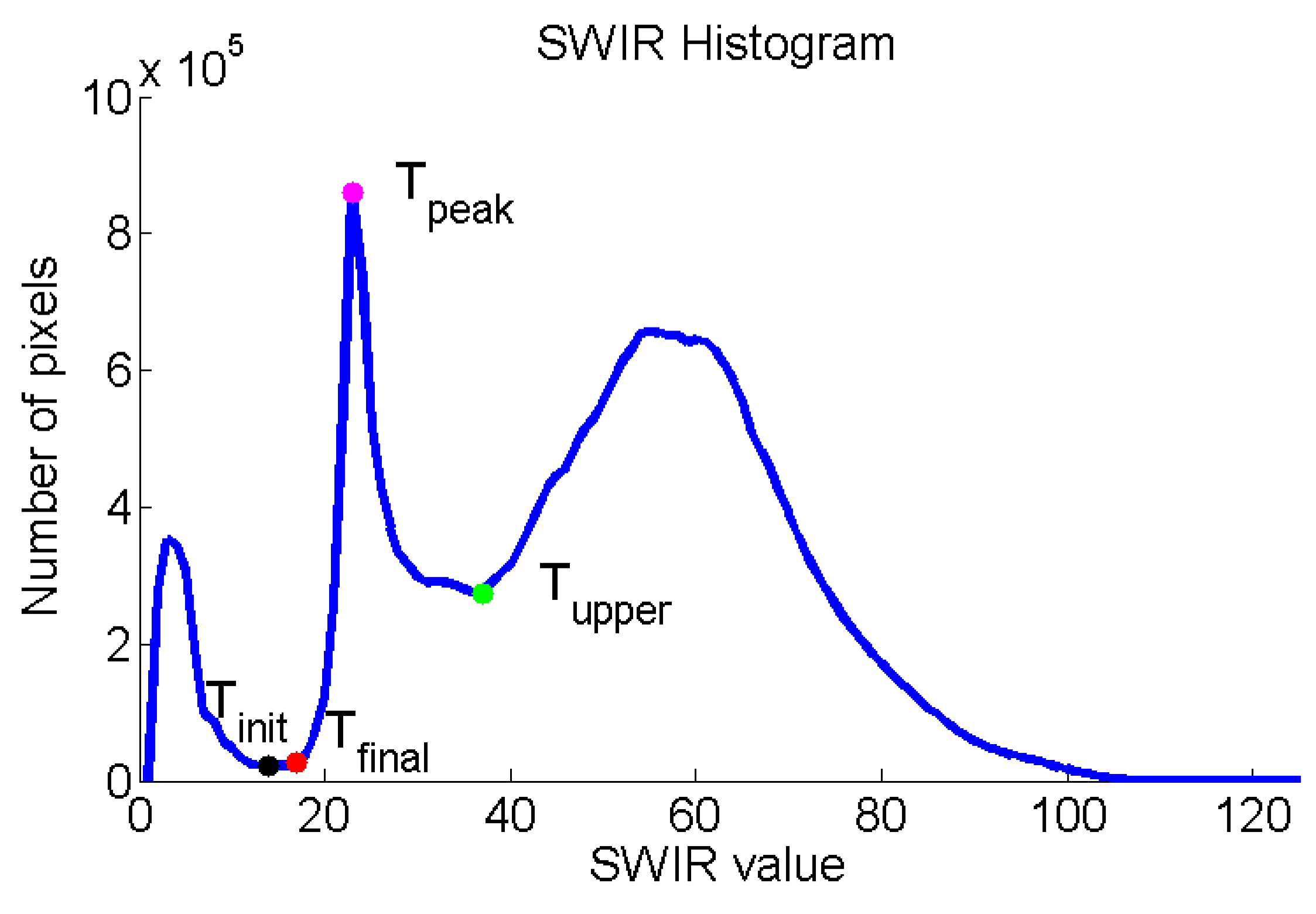
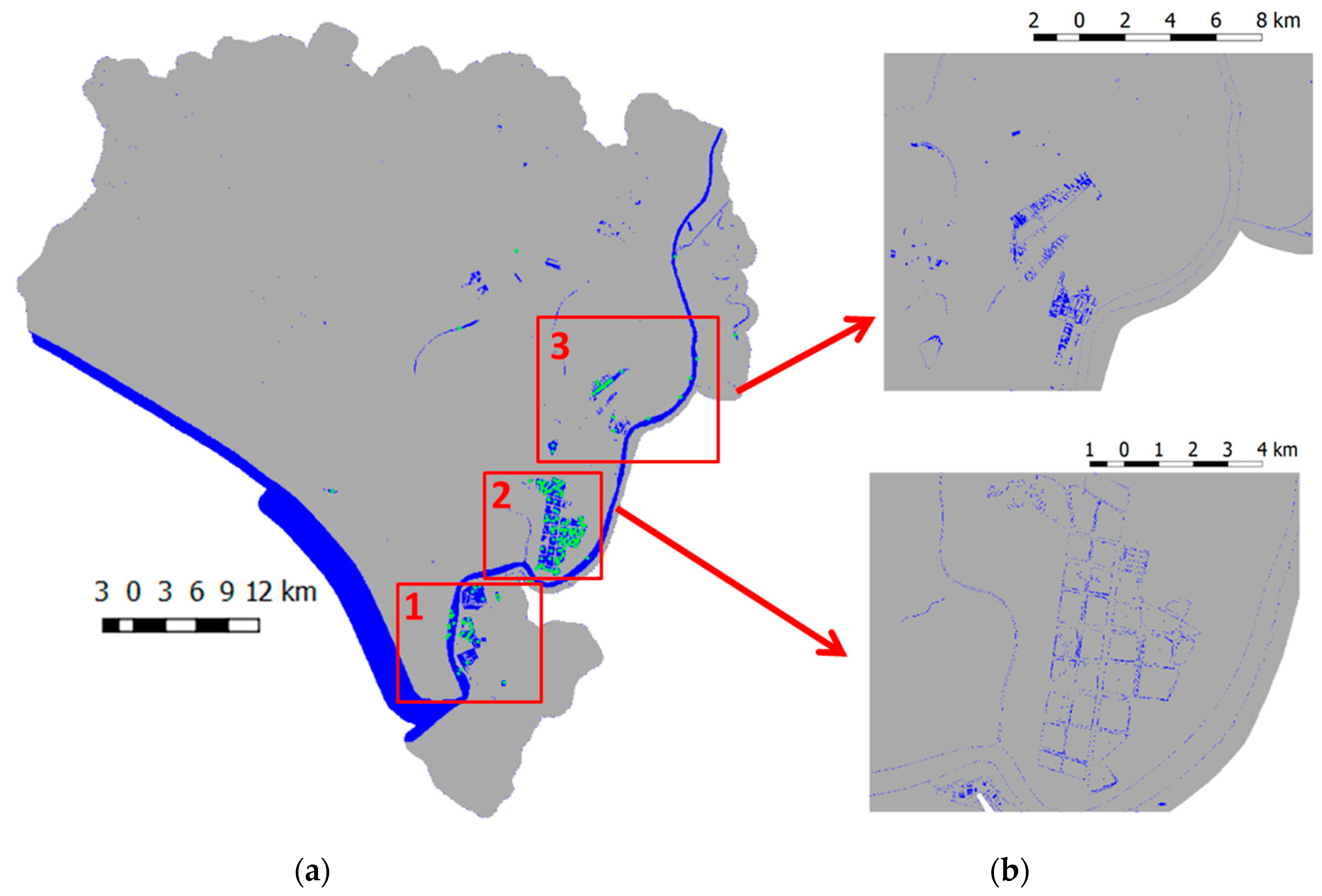
2.4.2. Mapping of the Open-Water Subclass
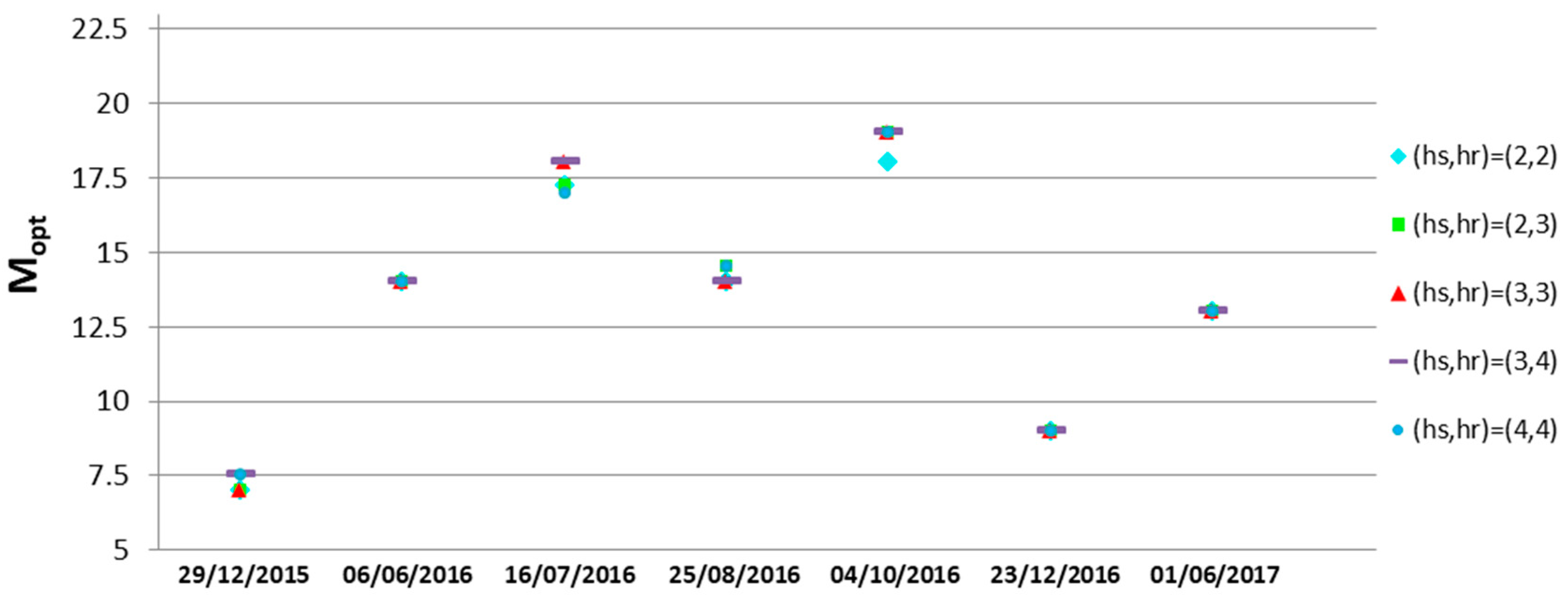
2.4.3. Testing of Mean-Shift Segmentation Parameters
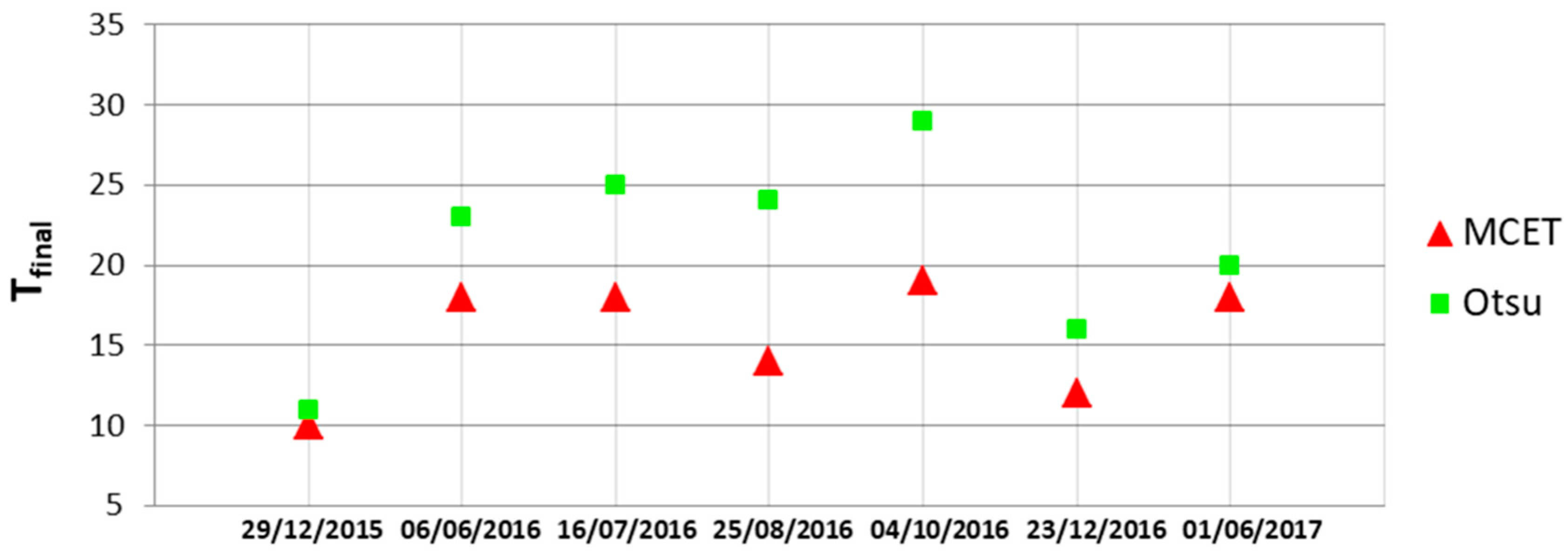
2.4.4. Effect of an Alternative Algorithm for Estimating Splitting Thresholds
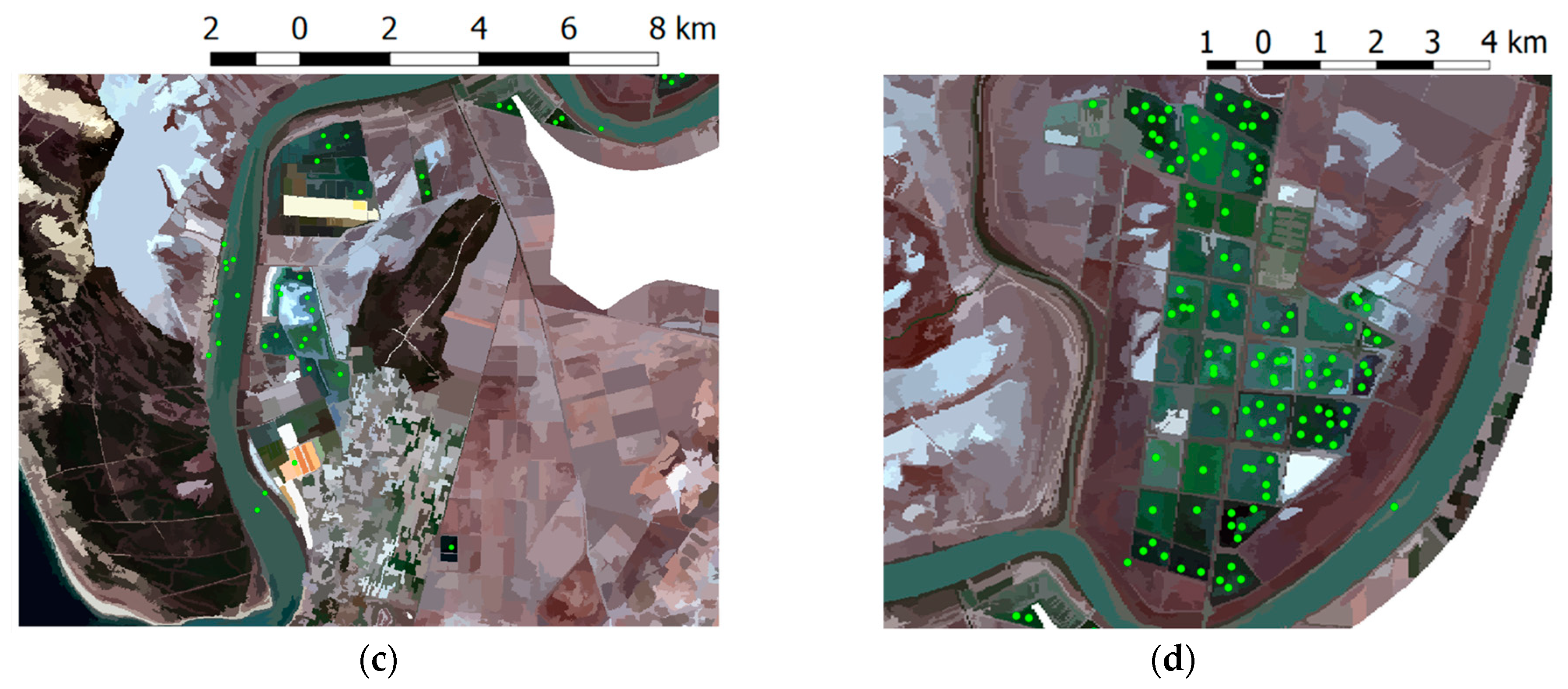
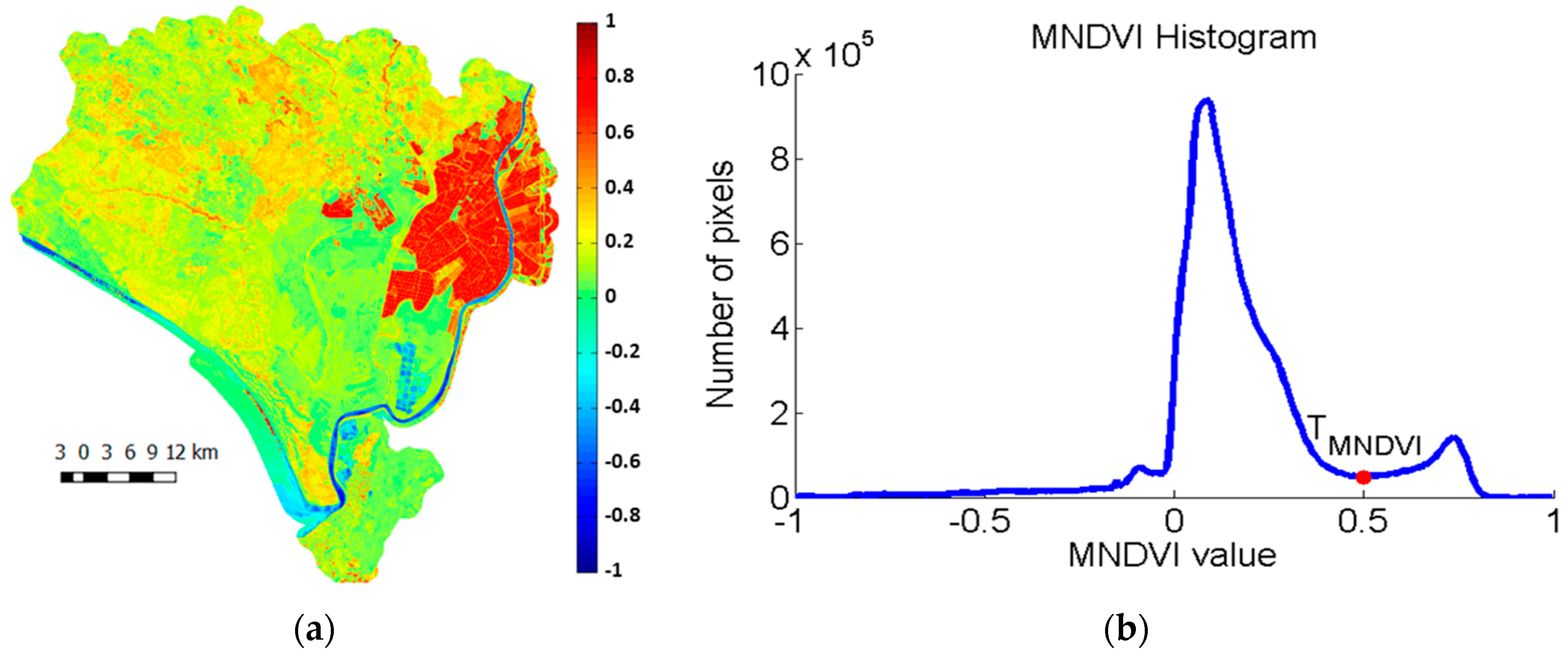
2.4.5. Mapping of the Water-Vegetation Subclass
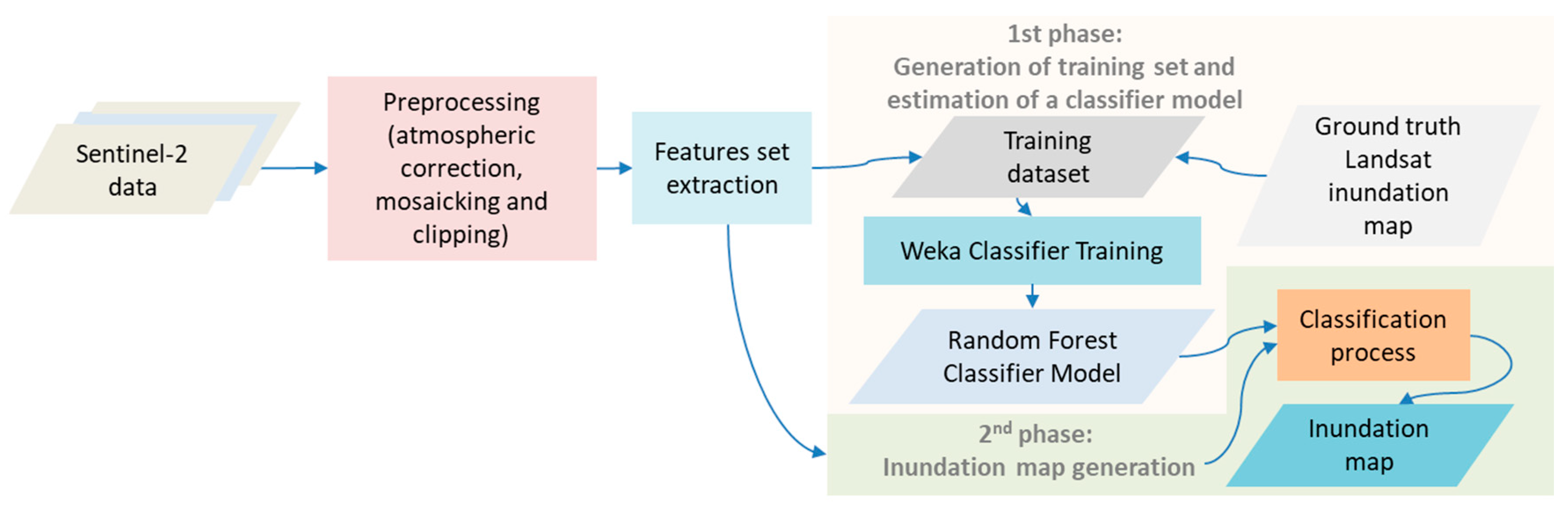
2.5. Supervised Approach
3. Results
3.1. Accuracy Assessment Results for S2 and Landsat Coincident Overpasses
3.2. Combined Accuracy
3.3. Performance of the Unsupervised Approach in Marshland
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- White, L.; Brisco, B.; Dabboor, M.; Schmitt, A.; Pratt, A. A collection of SAR methodologies for monitoring wetlands. Remote Sens. 2015, 7, 7615–7645. [Google Scholar] [CrossRef]
- Díaz-Delgado, R.; Aragonés, D.; Afán, I.; Bustamante, J. Long-term monitoring of the flooding regime and hydroperiod of Doñana marshes with Landsat time series (1974–2014). Remote Sens. 2016, 8, 775. [Google Scholar] [CrossRef]
- Afshari, S.; Tavakoly, A.A.; Rajib, M.A.; Zheng, X.; Follum, M.L.; Omranian, E.; Fekete, B.M. Comparison of new generation low-complexity flood inundation mapping tools with a hydrodynamic model. J. Hydrol. 2018, 556, 539–556. [Google Scholar] [CrossRef]
- Henry, J.B.; Chastanet, P.; Fellah, K.; Desnos, Y.L. Envisat multi-polarized ASAR data for flood mapping. Int. J. Remote Sens. 2006, 27, 1921–1929. [Google Scholar] [CrossRef]
- Mason, D.C.; Horritt, M.S.; Dall’Amico, J.T.; Scott, T.R.; Bates, P.D. Improving river flood extent delineation from synthetic aperture radar using airborne laser altimetry. IEEE Trans. Geosci. Remote Sens. 2007, 45, 3932–3943. [Google Scholar] [CrossRef]
- Hahmann, T.; Wessel, B. Surface water body detection in high-resolution TerraSAR-X data using active contour models. In Proceedings of the 8th European Conference on Synthetic Aperture Radar, Aachen, Germany, 7–10 June 2010; pp. 1–4. [Google Scholar]
- Schnebele, E.K. Fusion of Remote Sensing and Non-authoritative Data for Flood Disaster and Transportation Infrastructure Assessment. Doctoral’s Thesis, George Mason University, Fairfax, VA, USA, 2013. [Google Scholar]
- Huang, W.; DeVries, B.; Huang, C.; Lang, M.W.; Jones, J.W.; Creed, I.F.; Carroll, M.L. Automated Extraction of Surface Water Extent from Sentinel-1 Data. Remote Sens. 2018, 10, 797. [Google Scholar] [CrossRef]
- Töyrä, J.; Pietroniro, A. Towards operational monitoring of a northern wetland using geomatics-based techniques. Remote Sens. Environ. 2005, 97, 174–191. [Google Scholar] [CrossRef]
- Donchyts, G.; Schellekens, J.; Winsemius, H.; Eisemann, E.; van de Giesen, N. A 30 m Resolution Surface Water Mask Including Estimation of Positional and Thematic Differences Using Landsat 8, SRTM and OpenStreetMap: A Case Study in the Murray-Darling Basin, Australia. Remote Sens. 2016, 8, 386. [Google Scholar] [CrossRef]
- Yang, X.; Lu, X.X. Delineation of lakes and reservoirs in large river basins: An example of the Yangtze River Basin, China. Geomorphology 2013, 190, 92–102. [Google Scholar] [CrossRef]
- Sun, F.; Sun, W.; Chen, J.; Gong, P. Comparison and improvement of methods for identifying waterbodies in remotely sensed imagery. Int. J. Remote Sens. 2012, 33, 6854–6875. [Google Scholar] [CrossRef]
- Du, Y.; Zhang, Y.; Ling, F.; Wang, Q.; Li, W.; Li, X. Water bodies’ mapping from Sentinel-2 imagery with modified normalized difference water index at 10-m spatial resolution produced by sharpening the SWIR band. Remote Sens. 2016, 8, 354. [Google Scholar] [CrossRef]
- Ko, B.C.; Kim, H.H.; Nam, J.Y. Classification of potential water bodies using Landsat 8 OLI and a combination of two boosted random forest classifiers. Sensors 2015, 15, 13763–13777. [Google Scholar] [CrossRef] [PubMed]
- Feng, Q.; Gong, J.; Liu, J.; Li, Y. Flood mapping based on multiple endmember spectral mixture analysis and random forest classifier—The case of Yuyao, China. Remote Sens. 2015, 7, 12539–12562. [Google Scholar] [CrossRef]
- Skakun, S. A neural network approach to flood mapping using satellite imagery. Comput. Inform. 2012, 29, 1013–1024. [Google Scholar]
- Acharya, T.D.; Lee, D.H.; Yang, I.T.; Lee, J.K. Identification of Water Bodies in a Landsat 8 OLI Image Using a J48 Decision Tree. Sensors 2016, 16, 1075. [Google Scholar] [CrossRef] [PubMed]
- Sarp, G.; Ozcelik, M. Water body extraction and change detection using time series: A case study of Lake Burdur, Turkey. J. Taibah Univ. Sci. 2017, 11, 381–391. [Google Scholar] [CrossRef]
- Nandi, I.; Srivastava, P.K.; Shah, K. Floodplain Mapping through Support Vector Machine and Optical/Infrared Images from Landsat 8 OLI/TIRS Sensors: Case Study from Varanasi. Water Resour. Manag. 2017, 31, 1157–1171. [Google Scholar] [CrossRef]
- Mishra, K.; Prasad, P. Automatic Extraction of Water Bodies from Landsat Imagery Using Perceptron Model. J. Comput. Environ. Sci. 2015, 2015, 903465. [Google Scholar] [CrossRef]
- Otsu, N.A. threshold selection method from gray-level histograms. IEEE Trans. Syst. Man Cybern. 1979, 9, 62–66. [Google Scholar] [CrossRef]
- Nakmuenwai, P.; Yamazaki, F.; Liu, W. Automated Extraction of Inundated Areas from Multi-Temporal Dual-Polarization RADARSAT-2 Images of the 2011 Central Thailand Flood. Remote Sens. 2017, 9, 78. [Google Scholar] [CrossRef]
- Ban, H.J.; Kwon, Y.J.; Shin, H.; Ryu, H.S.; Hong, S. Flood Monitoring Using Satellite-Based RGB Composite Imagery and Refractive Index Retrieval in Visible and Near-Infrared Bands. Remote Sens. 2017, 9, 313. [Google Scholar] [CrossRef]
- Li, J.; Wang, S. An automatic method for mapping inland surface waterbodies with Radarsat-2 imagery. Int. J. Remote Sens. 2015, 36, 1367–1384. [Google Scholar] [CrossRef]
- Kittler, J.; Illingworth, J. Minimum error thresholding. Pattern Recognit. 1986, 19, 41–47. [Google Scholar] [CrossRef]
- Bovolo, F.; Bruzzone, L. A split-based approach to unsupervised change detection in large-size multitemporal images: Application to tsunami-damage assessment. IEEE Trans. Geosci. Remote Sens. 2007, 45, 1658–1670. [Google Scholar] [CrossRef]
- Martinis, S.; Twele, A.; Voigt, S. Towards operational near real-time flood detection using a split-based automatic thresholding procedure on high resolution TerraSAR-X data. Nat. Hazards Earth Syst. Sci. 2009, 9, 303–314. [Google Scholar] [CrossRef]
- Martinis, S.; Kuenzer, C.; Wendleder, A.; Huth, J.; Twele, A.; Roth, A.; Dech, S. Comparing four operational SAR-based water and flood detection approaches. Int. J. Remote Sens. 2015, 36, 3519–3543. [Google Scholar] [CrossRef]
- Chini, M.; Hostache, R.; Giustarini, L.; Matgen, P. A Hierarchical Split-Based Approach for Parametric Thresholding of SAR Images: Flood Inundation as a Test Case. IEEE Trans. Geosci. Remote Sens. 2017, 55, 6975–6988. [Google Scholar] [CrossRef]
- Kullback, S. Information Theory and Statistics; Dover Publications: New York, NY, USA, 1968. [Google Scholar]
- García-Novo, F.; Marín-Cabrera, C. Doñana: Water and biophere. Guadalquivir Hydrologic Basin Authority; Spanish Ministry of Environment: Madrid, Spain, 2005.
- Green, A.J.; Bustamante, J.; Janss, G.F.E.; Fernández-Zamudio, R.; Díaz-Paniagua, C. Doñana Wetlands (Spain). In The Wetland Book: II: Distribution, Description and Conservation; Finlayson, C., Milton, G., Prentice, R., Davidson, N., Eds.; Springer: Dordrecht, The Netherlands, 2016. [Google Scholar]
- Márquez-Ferrando, R.; Figuerola, J.; Hooijmeijer, J.C.; Piersma, T. Recently created man-made habitats in Doñana provide alternative wintering space for the threatened Continental European black-tailed godwit population. Biol. Conserv. 2014, 171, 127–135. [Google Scholar] [CrossRef]
- Bustamante, J.; Aragonés, D.; Afán, I. Effect of protection level in the hydroperiod of water bodies on Doñana’s aeolian sands. Remote Sens. 2016, 8, 867. [Google Scholar] [CrossRef]
- Kloskowski, J.; Green, A.J.; Polak, M.; Bustamante, J.; Krogulec, J. Complementary use of natural and artificial wetlands by waterbirds wintering in Doñana, south-west Spain. Aquat. Conserv. Mar. Freshw. Ecosyst. 2009, 19, 815–826. [Google Scholar] [CrossRef]
- Louis, J.; Debaecker, V.; Pflug, B.; Main-Knorn, M.; Bieniarz, J.; Mueller-Wilm, U.; Cadau, E.; Gascon, F. Sentinel-2 Sen2Cor: L2A Processor for Users. In Proceedings of the Living Planet Symposium, Prague, Czech Republic, 9–13 May 2016; pp. 1–8. [Google Scholar]
- ERDAS IMAGINE. 2016. Available online: https://www.hexagongeospatial.com/products/power-portfolio/erdas-imagine (accessed on 22 March 2018).
- Comaniciu, D.; Meer, P. Mean shift: A robust approach toward feature space analysis. IEEE Trans. Pattern Anal. Mach. Intell. 2002, 24, 603–619. [Google Scholar] [CrossRef]
- Kordelas, G.A.; Alexiadis, D.S.; Daras, P.; Izquierdo, E. Enhanced disparity estimation in stereo images. Image Vis. Comput. 2015, 35, 31–49. [Google Scholar] [CrossRef]
- Tombari, F.; Mattoccia, S.; Di Stefano, L. Segmentation-based adaptive support for accurate stereo correspondence. In Advances in Image and Video Technology; Springer: Berlin/Heidelberg, Germany, 2007; pp. 427–438. [Google Scholar]
- Lee, K.S.; Kim, T.H.; Yun, Y.S.; Shin, S.M. Spectral characteristics of shallow turbid water near the shoreline on inter-tidal flat. Korean J. Remote Sens. 2001, 17, 131–139. [Google Scholar]
- Li, W.; Du, Z.; Ling, F.; Zhou, D.; Wang, H.; Gui, Y.; Sun, B.; Zhang, X. A comparison of land surface water mapping using the normalized difference water index from TM, ETM+ and ALI. Remote Sens. 2013, 5, 5530–5549. [Google Scholar] [CrossRef]
- Toral, G.M.; Aragones, D.; Bustamante, J.; Figuerola, J. Using Landsat images to map habitat availability for waterbirds in rice fields. Ibis 2011, 153, 684–694. [Google Scholar] [CrossRef]
- Ashraf, M.; Nawaz, R. A comparison of change detection analyses using different band algebras for baraila wetland with Nasa’s multi-temporal Landsat dataset. J. Geogr. Inf. Syst. 2015, 7, 1–19. [Google Scholar] [CrossRef]
- Rokni, K.; Ahmad, A.; Selamat, A.; Hazini, S. Water feature extraction and change detection using multitemporal Landsat imagery. Remote Sens. 2014, 6, 4173–4189. [Google Scholar] [CrossRef]
- Frank, E.; Hall, M.A.; Witten, I.H. The WEKA Workbench. Online Appendix for “Data Mining: Practical Machine Learning Tools and Techniques”, 4th ed.; Morgan Kaufmann: Burlington, MA, USA, 2016. [Google Scholar]
- Breiman, L. Random forests. Mach. Learn. 2011, 45, 5–32. [Google Scholar] [CrossRef]
- Landis, J.R.; Koch, G.G. The measurement of observer agreement for categorical data. Biometrics 1977, 33, 159–174. [Google Scholar] [CrossRef] [PubMed]
- Ramírez, F.; Rodríguez, C.; Seoane, J.; Figuerola, J.; Bustamante, J. How will climate change affect endangered Mediterranean waterbirds? PLoS ONE 2018, 13, e0192702. [Google Scholar] [CrossRef] [PubMed]
- Cohen, S.; Brakenridge, G.R.; Kettner, A.; Bates, B.; Nelson, J.; McDonald, R.; Huang, Y.; Munasinghe, D.; Zhang, J. Estimating floodwater depths from flood inundation maps and topography. J. Am. Water Resour. Assoc. 2017. [Google Scholar] [CrossRef]
- Grimaldi, S.; Li, Y.; Pauwels, V.R.; Walker, J.P. Remote sensing-derived water extent and level to constrain hydraulic flood forecasting models: Opportunities and challenges. Surv. Geophys. 2016, 37, 977–1034. [Google Scholar] [CrossRef]
- Muster, S.; Heim, B.; Abnizova, A.; Boike, J. Water Body Distributions Across Scales: A Remote Sensing Based Comparison of Three Arctic Tundra Wetlands. Remote Sens. 2013, 5, 1498–1523. [Google Scholar] [CrossRef]
- Omranian, E.; Sharif, H.O. Evaluation of the Global Precipitation Measurement (GPM) Satellite Rainfall Products over the Lower Colorado River Basin, Texas. J. Am. Water Resour. Assoc. 2018. [Google Scholar] [CrossRef]
- Follum, M.L.; Tavakoly, A.A.; Niemann, J.D.; Snow, A.D. AutoRAPID: A model for prompt streamflow estimation and flood inundation mapping over regional to continental extents. J. Am. Water Resour. Assoc. 2017, 53, 280–299. [Google Scholar] [CrossRef]
- Nobre, A.D.; Cuartas, L.A.; Hodnett, M.; Rennó, C.D.; Rodrigues, G.; Silveira, A.; Waterloo, M.; Saleska, S. Height Above the Nearest Drainage—A hydrologically relevant new terrain model. J. Hydrol. 2011, 404, 13–29. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cycle | September | October | November | December | January | February | March | April | May | June | July | August |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 2015–2016 | 19 29 (L) | 17 | 8 | 6 (L) | 16 (L) 26 | 5 25 (L) | ||||||
| 2016–2017 | 4 24 | 4 (L) | 23 (L) | 12 | 2 12 | 2 | 1 (L) | 11 21 31 | 20 | |||
| 11 |
| Setinel-2 Bands | Resolution |
|---|---|
| Band 2 (Blue); Band 3 (Green); Band 4 (Red); Band 8 (NIR) | 10 m |
| Band 5 (Vegetation Red Edge); Band 6 (Vegetation Red Edge); Band 7 (Vegetation Red Edge); Band 8A (Narrow NIR); Band 11 (SWIR); Band 12 (SWIR) (upscaled to 10m relying on nearest-neighbors) | 20 m |
| Index Name and Abbreviation | Equation |
|---|---|
| Normalized Difference Water Index (NDWI) | (Band 3 − Band 8)/(Band 3 + Band 8) |
| Modified NDWI (MNDWI) | (Band 3 − Band 11)/(Band 3 + Band 11) |
| Normalized Difference Vegetation Index (NDVI) | (Band 8 − Band 4)/(Band 8 + Band 4) |
| Modified Normalized Difference Vegetation Index (MNDVI) | (Band 7 − Band 5)/(Band 7 + Band 5) |
| Part A | Unsupervised: Complete Area | ||||||||||||||
| Date | 29 December 2015 | 6 June 2016 | 16 July 2016 | 25 August 2016 | 4 October 2016 | 23 December 2016 | 1 June 2017 | ||||||||
| Class | PA | UA | PA | UA | PA | UA | PA | UA | PA | UA | PA | UA | PA | UA | |
| Water class | 91.34% | 93.41% | 93.21% | 94.46% | 90.03% | 68.98% | 94.77% | 70.79% | 90.76% | 97.16% | 85.10% | 95.82% | 92.49% | 95.21% | |
| Non-water class | 99.20% | 98.93% | 99.38% | 99.23% | 96.79% | 99.19% | 97.05% | 99.60% | 99.93% | 99.75% | 98.94% | 95.86% | 99.10% | 98.55% | |
| OA | 98.33% | 98.75% | 96.30% | 96.89% | 99.68% | 95.86% | 98.02% | ||||||||
| k | 0.9143 | 0.9313 | 0.7613 | 0.7939 | 0.9369 | 0.8753 | 0.9266 | ||||||||
| Part B | Supervised: Complete Area | ||||||||||||||
| Date | 29 December 2015 | 06 June 2016 | 16 July 2016 | 25 August 2016 | 4 October 2016 | 23 December 2016 | 1 June 2017 | ||||||||
| Class | PA | UA | PA | UA | PA | UA | PA | UA | PA | UA | PA | UA | PA | UA | |
| Water class | 99.26% | 91.58% | 99.05% | 92.85% | 98.81% | 93.02% | 98.24% | 84.90% | 98.30% | 95.78% | 98.61% | 92.23% | 99.38% | 93.98% | |
| Non-water class | 98.87% | 99.91% | 99.13% | 99.89% | 99.41% | 99.90% | 98.68% | 99.87% | 99.88% | 99.95% | 97.62% | 99.59% | 98.76% | 99.88% | |
| OA | 98.91% | 99.12% | 99.37% | 98.65% | 99.84% | 97.84% | 98.86% | ||||||||
| k | 0.9465 | 0.9536 | 0.9548 | 0.9036 | 0.9694 | 0.9391 | 0.9592 | ||||||||
| Part A | Unsupervised: Marshland | ||||||||||||||
| Date | 29 December 2015 | 6 June 2016 | 16 July 2016 | 25 August 2016 | 4 October 2016 | 23 December 2016 | 1 June 2017 | ||||||||
| Class | PA | UA | PA | UA | PA | UA | PA | UA | PA | UA | PA | UA | PA | UA | |
| Water class | 91.48% | 99.36% | 91.07% | 99.73% | 88.74% | 82.41% | 90.16% | 54.68% | 92.83% | 95.97% | 92.84% | 99.98% | 88.32% | 99.93% | |
| Non-water class | 99.98% | 99.75% | 99.93% | 97.34% | 99.92% | 99.95% | 99.90% | 99.99% | 99.99% | 99.99% | 99.94% | 79.79% | 99.95% | 90.92% | |
| OA | 99.74% | 97.85% | 99.87% | 99.89% | 99.99% | 94.40% | 94.59% | ||||||||
| k | 0.9512 | 0.9383 | 0.8540 | 0.6802 | 0.9438 | 0.8508 | 0.8902 | ||||||||
| Part B | Supervised: Marshland | ||||||||||||||
| Date | 29 December 2015 | 6 June 2016 | 16 July 2016 | 25 August 2016 | 4 October 2016 | 23 December 2016 | 1 June 2017 | ||||||||
| Class | PA | UA | PA | UA | PA | UA | PA | UA | PA | UA | PA | UA | PA | UA | |
| Water class | 98.59% | 92.76% | 99.26% | 97.95% | 96.53% | 95.74% | 97.56% | 87.25% | 98.65% | 77.81% | 99.01% | 98.52% | 99.24% | 98.70% | |
| Non-water class | 99.77% | 99.96% | 99.37% | 99.77% | 99.98% | 99.99% | 99.98% | 99.99% | 99.98% | 99.99% | 94.73% | 96.45% | 98.88% | 99.35% | |
| OA | 99.74% | 99.34% | 99.97% | 99.98% | 99.98% | 98.07% | 99.05% | ||||||||
| k | 0.9545 | 0.9817 | 0.9612 | 0.9611 | 0.8699 | 0.9435 | 0.9809 | ||||||||
| Part A | Unsupervised: Rice-Paddies | ||||||||||||||
| Date | 29 December 2015 | 6 June 2016 | 16 July 2016 | 25 August 2016 | 4 October 2016 | 23 December 2016 | 1 June 2017 | ||||||||
| Class | PA | UA | PA | UA | PA | UA | PA | UA | PA | UA | PA | UA | PA | UA | |
| Water class | 92.08% | 99.97% | 94.62% | 99.58% | 86.34% | 70.44% | 95.90% | 76.23% | 47.30% | 98.80% | 82.26% | 99.98% | 95.15% | 99.94% | |
| Non-water class | 99.95% | 86.49% | 99.75% | 96.80% | 71.44% | 86.90% | 75.36% | 95.70% | 99.99% | 99.69% | 99.95% | 65.84% | 99.87% | 90.33% | |
| OA | 94.73% | 97.80% | 78.00% | 84.64% | 99.69% | 86.77% | 96.62% | ||||||||
| k | 0.8863 | 0.9529 | 0.5642 | 0.6967 | 0.6384 | 0.7024 | 0.9236 | ||||||||
| Part B | Supervised: Rice-Paddies | ||||||||||||||
| Date | 29 December 2015 | 6 June 2016 | 16 July 2016 | 25 August 2016 | 4 October 2016 | 23 December 2016 | 1 June 2017 | ||||||||
| Class | PA | UA | PA | UA | PA | UA | PA | UA | PA | UA | PA | UA | PA | UA | |
| Water class | 99.63% | 98.98% | 99.07% | 97.84% | 98.87% | 98.00% | 97.85% | 87.23% | 89.18% | 74.10% | 98.71% | 98.39% | 99.69% | 99.51% | |
| Non-water class | 97.98% | 99.27% | 98.66% | 99.42% | 98.41% | 99.10% | 88.19% | 98.03% | 99.81% | 99.94% | 95.27% | 96.21% | 98.92% | 99.31% | |
| OA | 99.08% | 98.81% | 98.61% | 92.56% | 99.75% | 97.84% | 99.45% | ||||||||
| k | 0.9792 | 0.9749 | 0.9719 | 0.8513 | 0.8082 | 0.9429 | 0.9871 | ||||||||
| Part A | Unsupervised: Temporary Ponds | ||||||||||||||
| Date | 29 December 2015 | 6 June 2016 | 16 July 2016 | 25 August 2016 | 4 October 2016 | 23 December 2016 | 1 June 2017 | ||||||||
| Class | PA | UA | PA | UA | PA | UA | PA | UA | PA | UA | PA | UA | PA | UA | |
| Water class | 93.03% | 83.21% | 94.25% | 65.53% | 96.58% | 33.58% | 94.76% | 23.40% | 98.37% | 12.25% | 79.12% | 89.16% | 92.24% | 54.89% | |
| Non-water class | 99.99% | 99.99% | 99.95% | 99.99% | 99.90% | 99.99% | 99.93% | 99.99% | 99.92% | 99.99% | 99.99% | 99.97% | 99.90% | 99.99% | |
| OA | 99.98% | 99.95% | 99.90% | 99.93% | 99.92% | 99.95% | 99.89% | ||||||||
| k | 0.8784 | 0.7729 | 0.4980 | 0.3751 | 0.2177 | 0.8382 | 0.6877 | ||||||||
| Part B | Supervised: Temporary Ponds | ||||||||||||||
| Date | 29 December 2015 | 6 June 2016 | 16 July 2016 | 25 August 2016 | 4 October 2016 | 23 December 2016 | 1 June 2017 | ||||||||
| Class | PA | UA | PA | UA | PA | UA | PA | UA | PA | UA | PA | UA | PA | UA | |
| Water class | 96.60% | 55.82% | 95.83% | 60.11% | 99.09% | 33.33% | 99.37% | 21.36% | 100% | 10.29% | 90.36% | 58.10% | 96.51% | 59.70% | |
| Non-water class | 99.95% | 99.99% | 99.94% | 99.99% | 99.90% | 99.99% | 99.92% | 99.99% | 99.90% | 100% | 99.90% | 99.99% | 99.92% | 99.99% | |
| OA | 99.95% | 99.94% | 99.90% | 99.92% | 99.90% | 99.89% | 99.91% | ||||||||
| k | 0.7073 | 0.7372 | 0.4984 | 0.3513 | 0.1864 | 0.7067 | 0.7373 | ||||||||
| Water Class | Non-Water Class | ||||||
|---|---|---|---|---|---|---|---|
| Measure | PA | UA | PA | UA | OA | k | |
| Approach and Study Area | |||||||
| 1 | Unsupervised (MCET): Complete area | 90.23% | 88.90% | 98.62% | 98.80% | 97.71% | 0.8827 |
| 2 | Supervised: Complete area | 98.90% | 92.06% | 98.96% | 99.86% | 98.95% | 0.9477 |
| 3 | Unsupervised: Marshland | 91.14% | 99.77% | 99.95% | 97.82% | 98.18% | 0.9413 |
| 4 | Supervised: Marshland | 99.10% | 98.32% | 98.96% | 99.77% | 99.48% | 0.9839 |
| 5 | Unsupervised: Rice-paddies | 90.54% | 92.09% | 92.87% | 91.46% | 91.76% | 0.8347 |
| 6 | Supervised: Rice-paddies | 99.07% | 97.21% | 97.39% | 99.13% | 98.19% | 0.9639 |
| 7 | Unsupervised: Temporary Ponds | 89.67% | 52.59% | 99.94% | 99.99% | 99.93% | 0.6626 |
| 8 | Supervised: Temporary Ponds | 95.04% | 46.32% | 99.92% | 99.99% | 99.91% | 0.6224 |
| 9 | Unsupervised (Otsu): Complete area | 94.20% | 76.49% | 96.46% | 99.27% | 96.21% | 0.8320 |
| Water Class | Non-Water Class | ||||||
|---|---|---|---|---|---|---|---|
| Measure | PA | UA | PA | UA | ΟA | k | |
| Approach | |||||||
| Unsupervised using | 91.14% | 99.77% | 99.95% | 97.82% | 98.18% | 0.9413 | |
| Unsupervised using | 93.30% | 99.63% | 99.91% | 98.34% | 98.59% | 0.9548 | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kordelas, G.A.; Manakos, I.; Aragonés, D.; Díaz-Delgado, R.; Bustamante, J. Fast and Automatic Data-Driven Thresholding for Inundation Mapping with Sentinel-2 Data. Remote Sens. 2018, 10, 910. https://doi.org/10.3390/rs10060910
Kordelas GA, Manakos I, Aragonés D, Díaz-Delgado R, Bustamante J. Fast and Automatic Data-Driven Thresholding for Inundation Mapping with Sentinel-2 Data. Remote Sensing. 2018; 10(6):910. https://doi.org/10.3390/rs10060910
Chicago/Turabian StyleKordelas, Georgios A., Ioannis Manakos, David Aragonés, Ricardo Díaz-Delgado, and Javier Bustamante. 2018. "Fast and Automatic Data-Driven Thresholding for Inundation Mapping with Sentinel-2 Data" Remote Sensing 10, no. 6: 910. https://doi.org/10.3390/rs10060910
APA StyleKordelas, G. A., Manakos, I., Aragonés, D., Díaz-Delgado, R., & Bustamante, J. (2018). Fast and Automatic Data-Driven Thresholding for Inundation Mapping with Sentinel-2 Data. Remote Sensing, 10(6), 910. https://doi.org/10.3390/rs10060910