1. Introduction
Mediterranean regions host a wide diversity of habitats and ecosystems, characterized by a large amount of rare and endemic species, despite their restricted spatial extent [
1,
2,
3,
4,
5]. Specifically, the Mediterranean Basin hosts about 25,000 plant species representing 10% of the world’s total floristic richness concentrated on only 1% of the world’s surface [
6]. Additionally, a high level of narrow endemism is a major feature of this species richness [
7]. Endemism and richness result in very heterogeneous landscapes, and the understanding of the spatial patterns of plant distribution is crucial to give better insights into past and current processes shaping biodiversity [
8]. Mediterranean landscapes are currently facing a major crisis due to climate change, combined with a series of direct anthropic factors leading either to changes in traditional management practices such as pasture and logging or to changes in land use driven by urban sprawl [
9]. The rate of open landscapes such as grasslands or open shrublands is decreasing as a direct consequence of these factors, resulting in a loss of biodiversity [
10] and increasing risks of fire propagation [
11].
In light of the increasing pressures affecting this unique and complex landscape mosaic, the development of operational monitoring systems providing information on ecosystem changes is critical to support the implementation of international policies towards efficient conservation planning [
12]. Such monitoring systems aim at linking ecological processes to environmental and anthropogenic factors, requiring repetitive and spatially explicit acquisitions performed over large extent. Remote sensing appears as a particularly appropriate technical solution to provide information supporting requirements for monitoring systems oriented to biodiversity conservation [
13]. The European Union Member States identified very high spatial resolution (VHSR) Earth observation data as an appropriate technique to contribute to the production of indicators on habitat structure and meet the requirements of the Habitats Directive [
14]. Monitoring the spatial and temporal dynamics associated with the degree of openness of Mediterranean ecosystems is key to analyzing and better understanding ecological processes. Herein, information is needed on the spatial distribution of vertical vegetation strata (e.g., herbaceous, shrub, or tree layer) from fine scale (identification of individual trees) to broader scale (landscape analysis). This level of detail can only be achieved with VHSR images with metric to sub-metric spatial resolution.
The description of habitat structure usually follows two steps: (i) the identification of different vegetation strata of interest leading to categorical maps; and (ii) the computation of various landscape metrics aiming at summarizing the information provided by these categorical maps at various spatial scales. Categorical maps of the vegetation strata derived from remotely sensed data can be obtained either from photo-interpretation and manual delineation, or from automatic classification.
The discrimination between soil and vegetation is technically straightforward when visible and near-infrared information is available [
15], and the potential of VHSR imagery to map shrubs has also been demonstrated in various studies using either pixel-based image analysis (PBIA) or object-based image analysis (OBIA). The estimation of the fraction cover of shrubs and bare soil strata can be performed with PBIA with a simple thresholding on panchromatic gray level values [
16] or with supervised algorithms based on multi-spectral imagery [
17]. OBIA involves preliminary segmentation of the image followed by a classification, and led to improved delineation of vegetation strata [
18,
19], especially for sub-metric spatial resolution [
20].
Despite the existing methodological solutions for the identification of vegetation strata, the differentiation between shrubs and trees remains a major challenge, in particular when these vegetation strata are highly mixed, and even more complex when limited spectral information leads to confusion of herbs and grasslands [
21,
22]. Promising results have been found on the characterization of heterogeneous habitat structures by combining LIDAR and optical data (e.g., [
23,
24,
25]). Nevertheless, we must highlight that such a combination of sensors is technically, logistically, and financially too demanding to be considered as an operational approach for monitoring purposes.
Once identified, the spatial distribution of vegetation strata can be used to compute higher-level landscape metrics and summarize spatial information. A variety of landscape metrics exists, providing complementary information about the spatial heterogeneity and organization of landscape patterns: shape, aggregation, and connectivity [
26,
27]. The conceptual straightforwardness and intuitive appeal of these metrics contribute to their widespread use [
27]: they provide synoptic information which can then be directly related to natural habitat fragmentation [
19] and can also be used as input and combined with other observations for higher level ecological applications such as identification of habit preference of endangered bird species [
17].
One limitation of structure indicators based on the classification paradigm is that both choice of the classification scheme and the associated error can dramatically impact the resulting metrics, even for classification error rates considered as low as in the standards of remote sensing analysis [
27,
28,
29]. This variability inherent to the computation of these metrics sometimes results in misleading scientific conclusions [
30]. Therefore, continuous models have been increasingly proposed as an alternative approach to the discrete patch framework [
31]. The aim of these continuous models is to provide a more accurate representation of the habitat heterogeneity, in particular for landscapes for which patch delineation is technically or conceptually too challenging. The main advantage of continuous approaches over the discrete patch framework is that they are not impacted by classification errors because they are based on spatial statistics of pixel values (i.e., textural information) as the indicator of habitat structure, and are not based on patchy structure representation or the presence of boundaries. McGarigal et al. [
32] showed that indices derived from each approach provide complementary information about landscape structure and concluded that there is a need to further test the relevance of continuous models for ecological applications. Numerous textural indices such as Haralick indices [
33], Gabor filters [
33], or wavelet decomposition [
34] proved to be useful for the identification of several classes of tree and shrub density, but their proper use requires careful parameterization. Direct measurement of autocorrelation also showed strong potential as an indicator of disturbance caused by grazing, fire, or shrub encroachment [
35,
36]. Among this variety of methods taking advantage of textural information, the Fourier-based textural ordination (FOTO) developed by Couteron et al. [
37] shows particularly desirable advantages for the characterization of structural heterogeneity across landscapes. The method produces one or multiple textural continuous gradients with no a priori hypothesis about the underlying structure of the image, and only requires the selection of the size of the elementary spatial unit as parameterization. The method also proved its ability to characterize subtle variations in landscape structure with one or two indices [
37]. The identification of gradients derived from continuous models applied on VHSR data shows strong potential for the production of metrics related to habitat structure. However, such models are seldom used for habitat monitoring because of their limitation in the interpretation and implementation of continuous data products [
27]. This study provides insights on the interpretation of continuous models in terms of spatial structures of heterogeneous vegetation. Discrete and continuous approaches were applied to VHSR imagery acquired over a Mediterranean landscape characterized by a heterogeneous structure. The FOTO method was applied to derive continuous gradients, and a selection of landscape metrics was computed from categorical maps differentiating bare soil (BS) from herbaceous vegetation (H), low ligneous (LL), and high ligneous (HL). Then we compared the information provided by each method, using a machine learning regression model to retrieve landscape metrics from two textural indices computed with FOTO. By this comparison, our aim was to understand the ability of FOTO to summarize information from multiple landscape metrics relevant for the characterization of habitat structure heterogeneity, while preventing drawbacks inherent to categorical maps. The methodology and the results are discussed, as well as the potential of this framework to support continuous approaches as a surrogate of landscape structure metrics to provide insights towards habitat conservation monitoring.
2. Methods
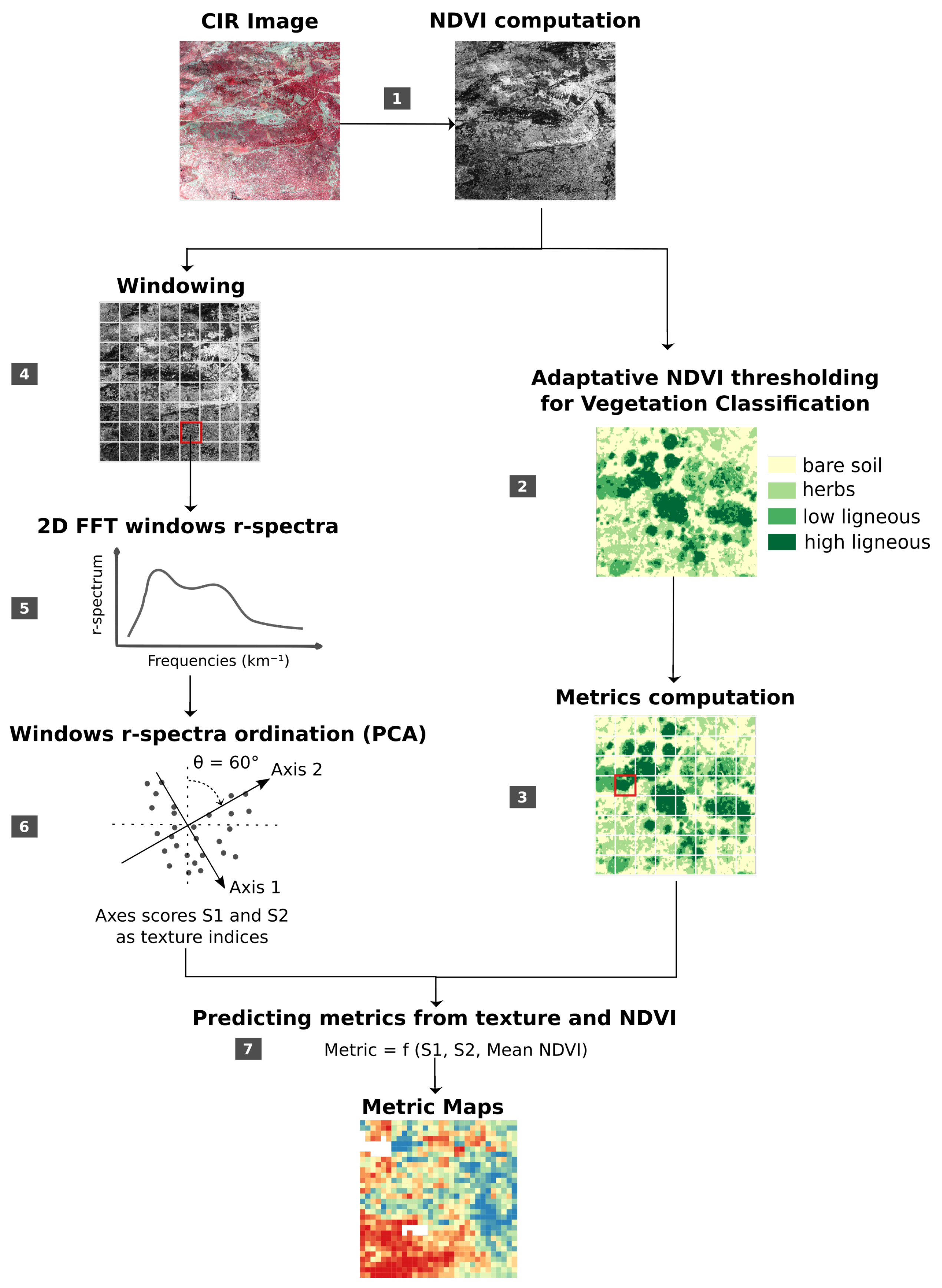
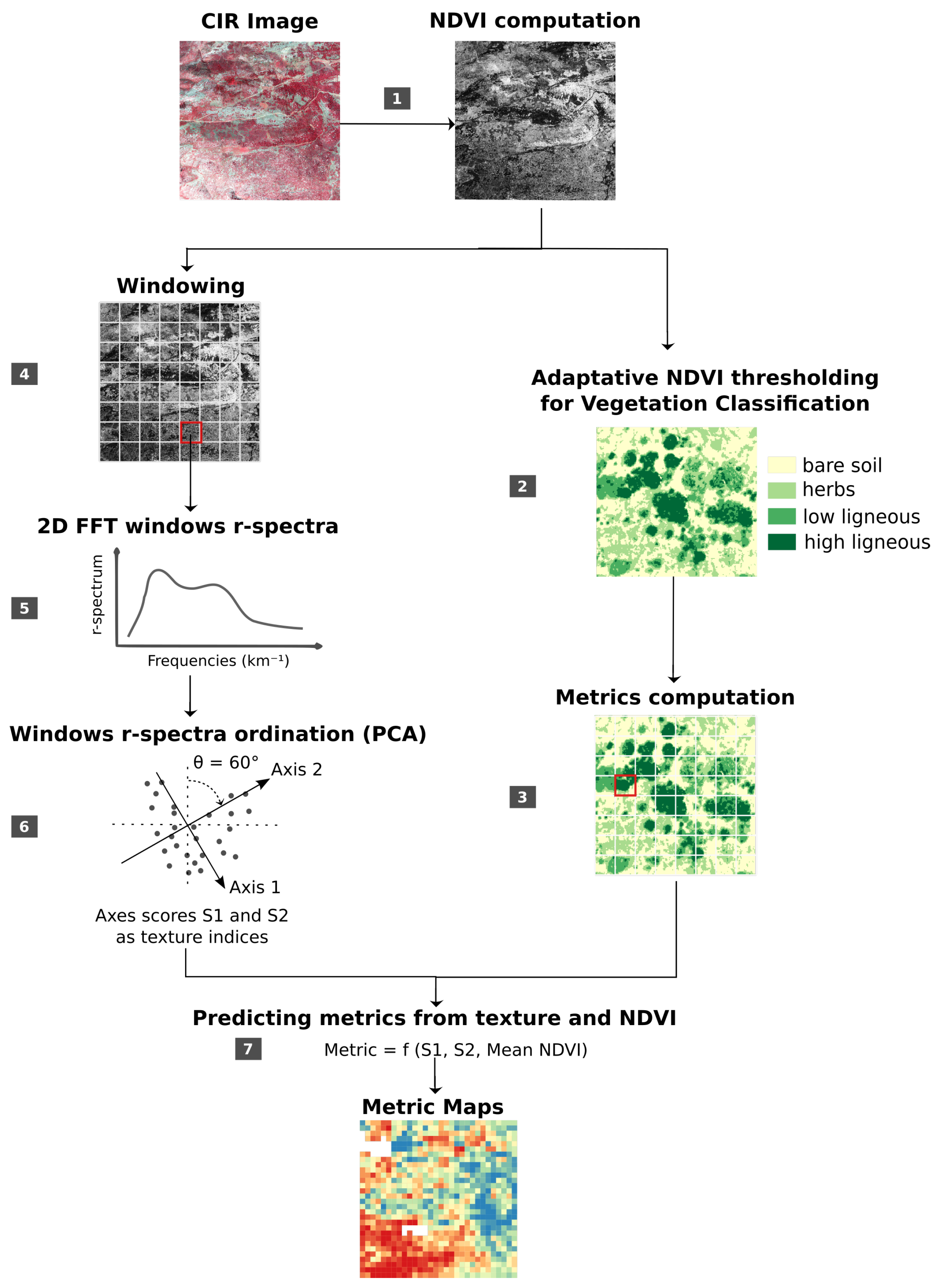
The general workflow of this study was built around the comparison of discrete and continuous approaches (
Figure 1). First, the spatial distribution of the four strata of interest (BS, H, LL, and HL) was identified from very-high-resolution coloured infrared (CIR) airborne images based on radiometric differences among strata in the visible and near infrared domains [
15] (
Figure 1, step 1 and 2). We considered the four strata as pure and mutually exclusive. Next, we computed landscape structure metrics for individual vegetation strata and for grouped strata corresponding to ground strata (BS + H) and ligneous strata (LL + HL) considering homogeneous spatial units across the landscape (
Figure 1, step 3). Then, we computed textural information from the Normalized Difference Vegetation Index (NDVI) layer of the CIR image (see
Figure 1, steps 4–6). The textural information was obtained with the FOTO method, which is fully detailed bellow (
Section 2.5). Finally, we tested the performances of the textural information as predictor variables for the estimation of landscape structure metrics when used with machine learning regression (
Figure 1, step 7). Couteron et al. [
37] highlighted that textural attributes lead to poor discrimination ability between landscapes with opposite structural patterns, such as patches of bare soil and herbaceous vegetation included in a matrix of dense ligneous vegetation vs. patches of dense ligneous vegetation included in a matrix of bare soil and herbaceous vegetation. It is thus suggested that the combination of textural attributes with radiometric information may improve the discrimination in this situation [
37]. Therefore, here we considered the synergy between these two types of information by comparing the performance of models aiming at estimating landscape structure metrics when trained with textural and radiometric information separated or combined (
Section 2.5.3).
2.1. Study Area
Mediterranean ecosystems are characterized by a complex landscape of heterogeneous mosaics. This heterogeneity is key to their exceptional level of biodiversity [
5] and results from long-term co-evolution of human activities associated with heterogeneous semi-open habitats [
38]. However, the structure of these natural habitats is currently shifting due to changes in traditional management practices, as mentioned previously. Among the many Mediterranean open habitats, the pseudo-steppe with grasses and annuals of the Thero-Brachypodietea [
39] is threatened by the progressive encroachment of woody vegetation through natural successions due to the abandonment of grazing activities, and is also listed as a habitat of community interest by the European Council Directive 92/43/EEC, which aims to promote the maintenance of biodiversity. We focused on the site the
Montagne de la Moure et Causse d’Aumelas, which is located in France, 30 km West of Montpellier (
N,
N) (see
Figure 2a). It is part of the European Natura 2000 ecological network for natural habitat conservation, and it was selected for our study because it contains numerous habitats of high interest organized in landscape mosaics, including pseudo-steppe with grasses and annuals of the Thero-Brachypodietea.
Our study site was a section of 3 km × 3 km (see
Figure 2b) within
Montagne de la Moure et Causse d’Aumelas. The area was carefully chosen to be representative of the diversity of vegetation types present on the whole site in order to test the generalizability of our approach. It is characterized by heterogeneous structure types, with a continuous openness gradient ranging from open pastures (e.g.,
Brachypodium retusum mixed with
Thymus vulgaris) to degraded pastures with variable colonization rates of shrubs (
Quercus coccifera,
Juniperus oxycedrus, or
Genista scorpius). There is a dynamic process of landscape closure by shrubs or forest (e.g.,
Quercus ilex and
Quercus pubescens) (
Figure 2c). The climate of this study site is characterized by hot dry summer with heavy rain events and a cold wet winter. Elevation is between 100 m and 349 m.
2.2. CIR Aerial Images
We used aerial images available through the BD ORTHO
IRC, a French CIR airborne image database. This image database, made available by the National Institute of Geographical and Forestry Information (IGN), is updated every three years and includes VHSR images (0.5-m spatial resolution) acquired over three spectral broad-bands with a radiometric resolution of 8 bits. These spectral bands correspond to the near-infrared, red, and green domains. It is a valuable source of information for vegetation structure at a fine scale over large areas at a reasonable cost [
10,
40]. The image dataset used in the study was acquired on the 23th and 26th of June 2012, respectively, between 1 and 2 p.m. and between 11 a.m. and 12 p.m., when the area of trees’ shadows was minimal. Vegetation seasonality is key to discrimination among strata: the photosynthetic activity of both herbaceous and ligneous strata in early vegetative season (spring) may reduce the ability of remote sensing to discriminate among these strata, while herbaceous vegetation dries first during early spring. Therefore, the period of image acquisition has a strong potential influence on the applications considered in this study. The data available for our study did not allow us to test the influence of seasonality, but the time of acquisition of our image dataset should reduce the risk of confusion between herbaceous and ligneous strata. Images are provided in 1 km
square tiles downloadable in GeoTiff format, in Lambert-93 projection.
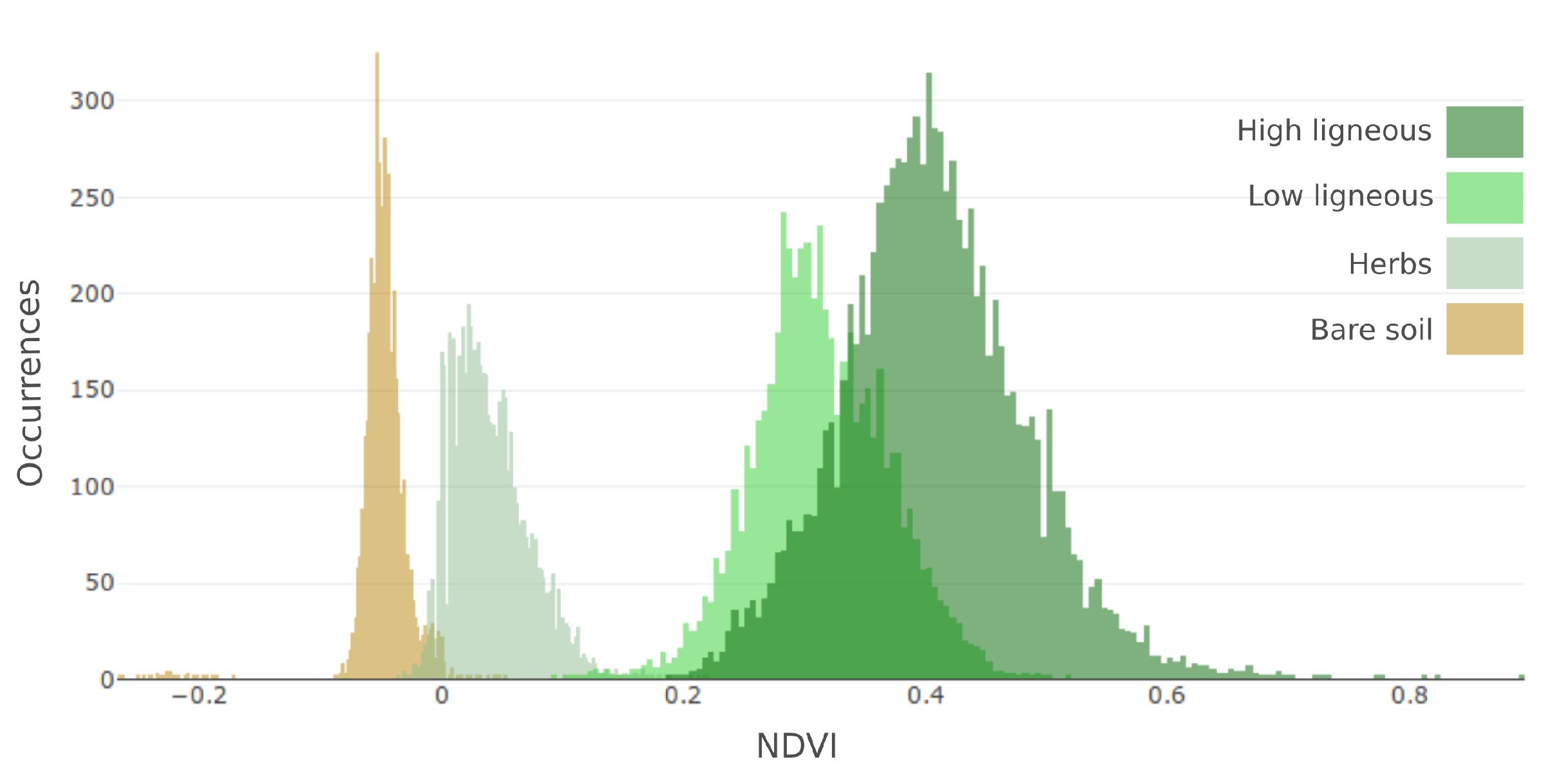
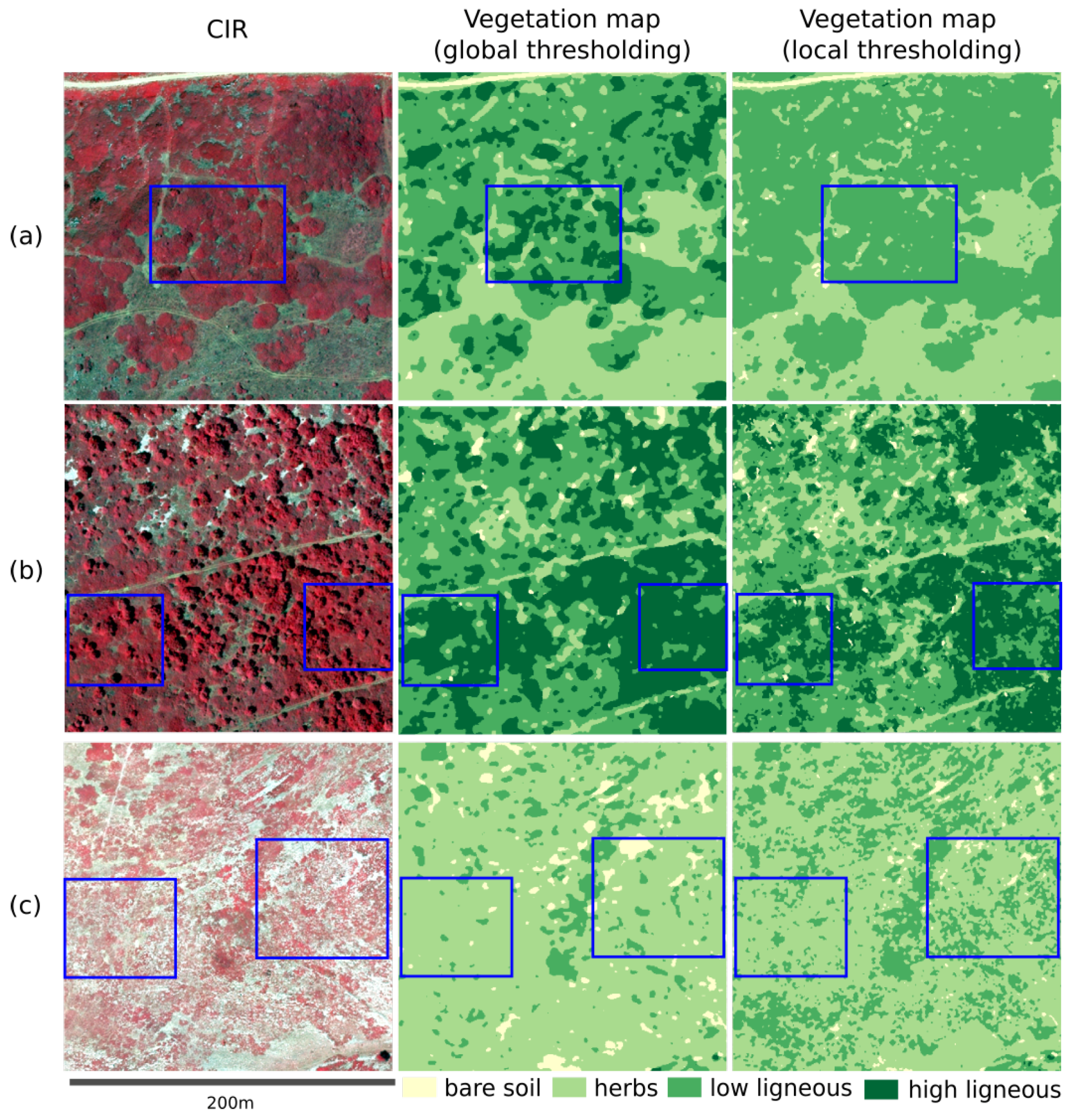
2.3. Identification of the Vegetation Strata
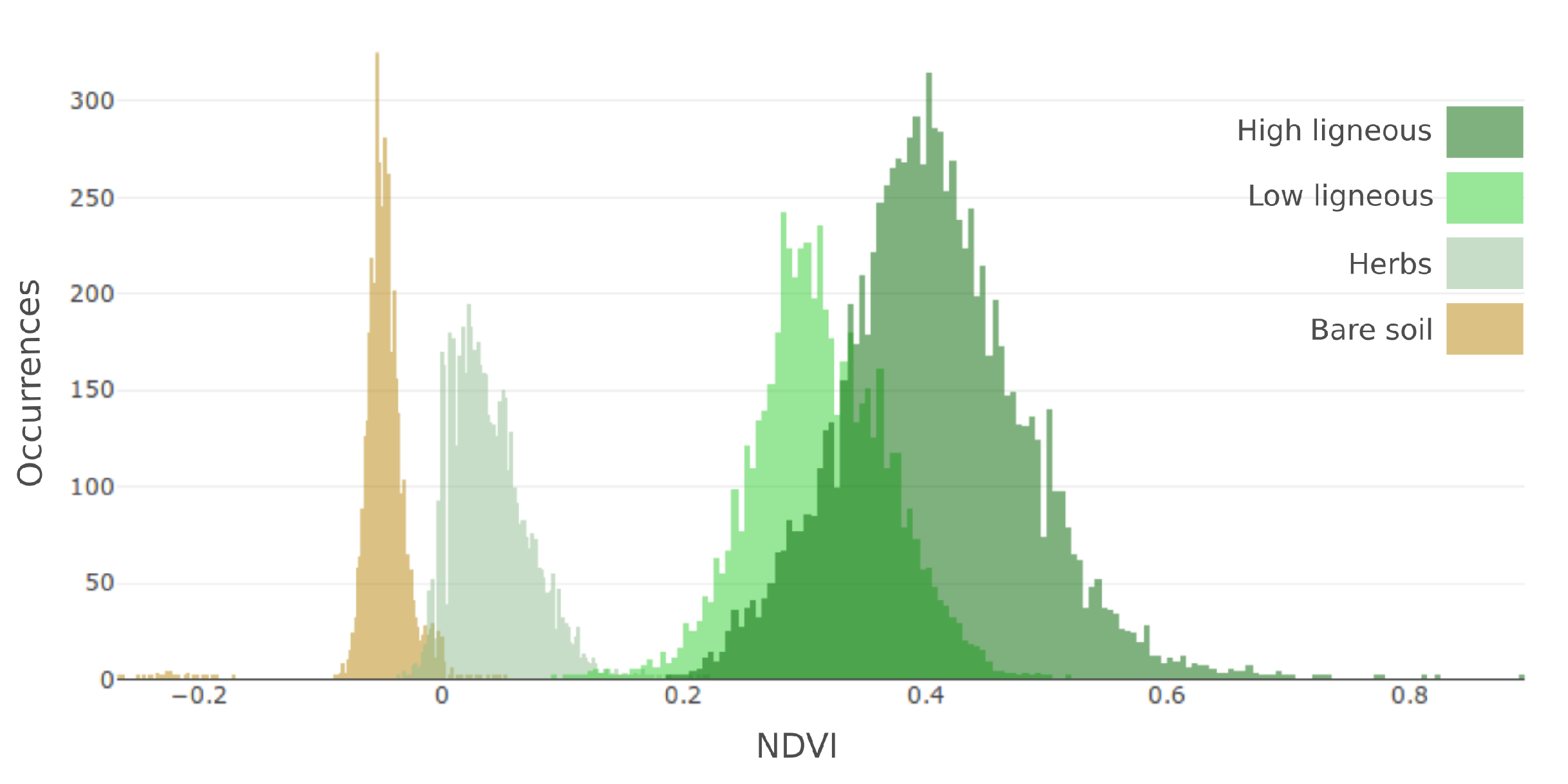
The distinction between the four vegetation strata was based on NDVI thresholding . NDVI is mainly used as an indicator of vegetation photosynthetic activity and vegetation density. Therefore, the choice of using it for the differentiation between BS and vegetated surfaces appeared particularly appropriate. Visual analysis of the NDVI images also highlighted that NDVI was relevant for the discrimination among vegetation strata, with NDVI values increasing with vegetation density, from H to LL to HL. However, the optimal threshold value allowing differentiating among strata varied substantially depending on the location on the site, leading to poor discrimination at the site scale when defining a unique threshold value to discriminate between pairs of strata.
We developed a graphical user interface in order to assist operators in the definition of the optimal local thresholds among strata based on visual interpretation. First, the image was split into 6.25 ha square windows. Then, thresholds between pairs of classes were defined sequentially—first between BS and H, then between H and LL, and finally between LL and HL. The presence of shadows may increase confusion when using NDVI as a criterion to discriminate among vegetation strata. We did not exclude shadows in our study, but image data was acquired around noon, in order to minimize these shadows. A
majority filter was finally applied on the vegetation map prior to computation in order to remove the salt and pepper effect, considered here as an artefact of the classification process. We validated the resulting strata maps based on the identification of a set of regions by an independent operator. For each spatial unit and each stratum (if present), a set of regions with minimum surface of 2.5 m
(i.e., 10 image pixels) with unambiguous identification was digitized after photo-interpretation and compared with the strata obtained from NDVI thresholding. In total, 524 regions representing 25,497 pixels (see
Table 1) were identified. The accuracies of the global thresholding and the local thresholding methods were assessed using kappa coefficient, overall accuracy (OA), user accuracy (UA), and producer accuracy (PA) for each vegetation stratum.
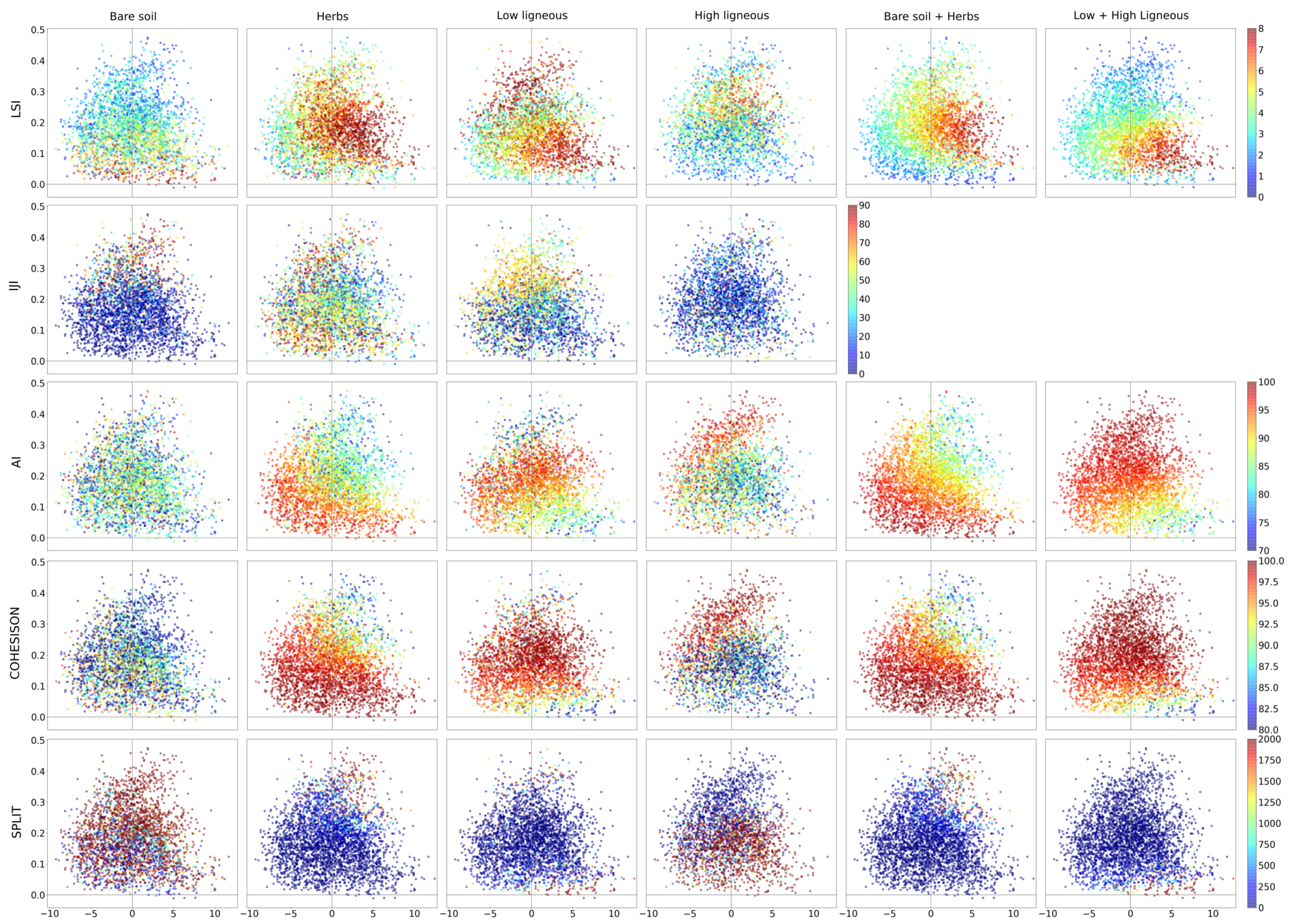
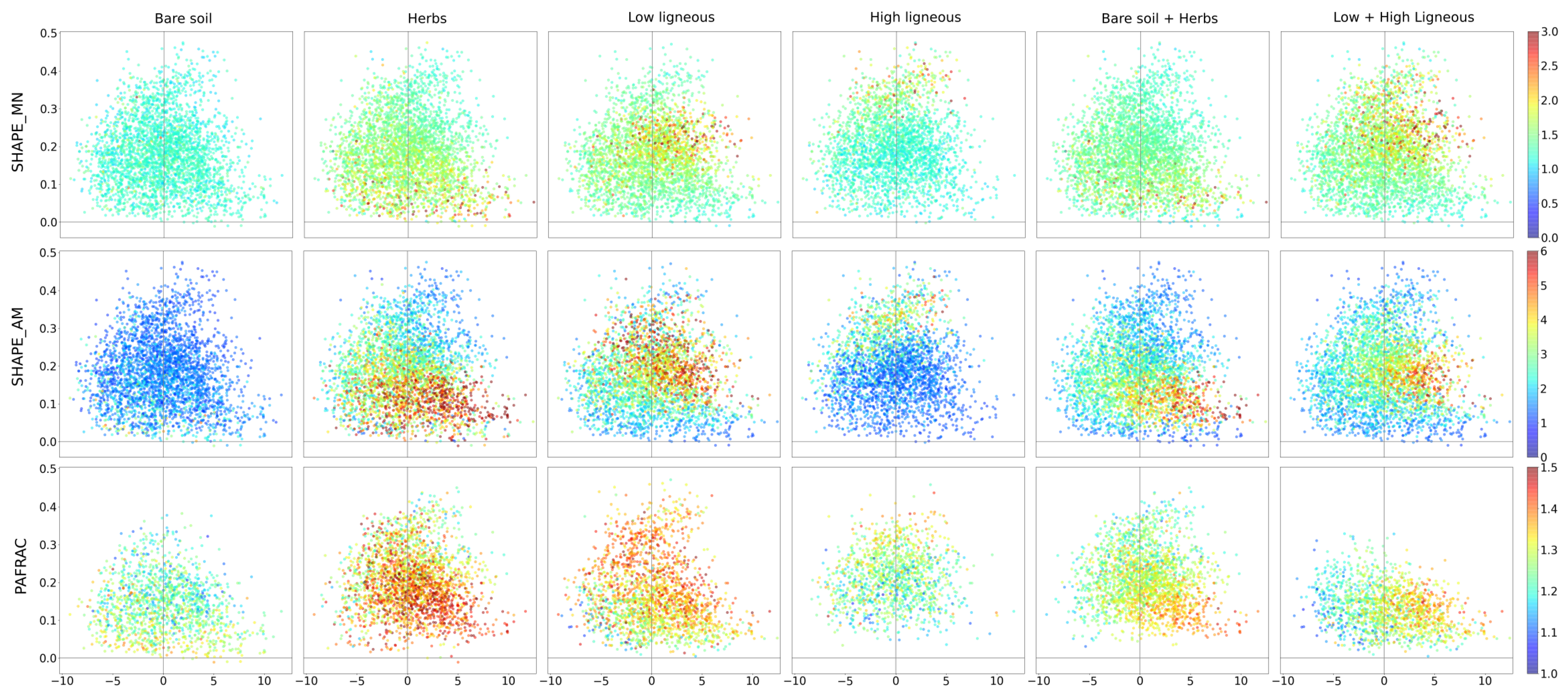
2.4. Metrics Computation
Various landscape metrics were computed with FRAGSTATS 4.2.1. software. The metrics were computed with a specific window size
N for each stratum or combination of stratum (BS + H and LL + HL) individually and for all strata considered together (called “landscape level” in FRAGSTATS). FRAGSTATS enables the computation of a large number of metrics for categorical landscape patterns. These metrics are grouped according to landscape pattern features. This study focused on three main groups, corresponding to area, shape, and aggregation metrics [
26]. Some of these metrics show strong collinearity, in particular metrics from the same class [
41,
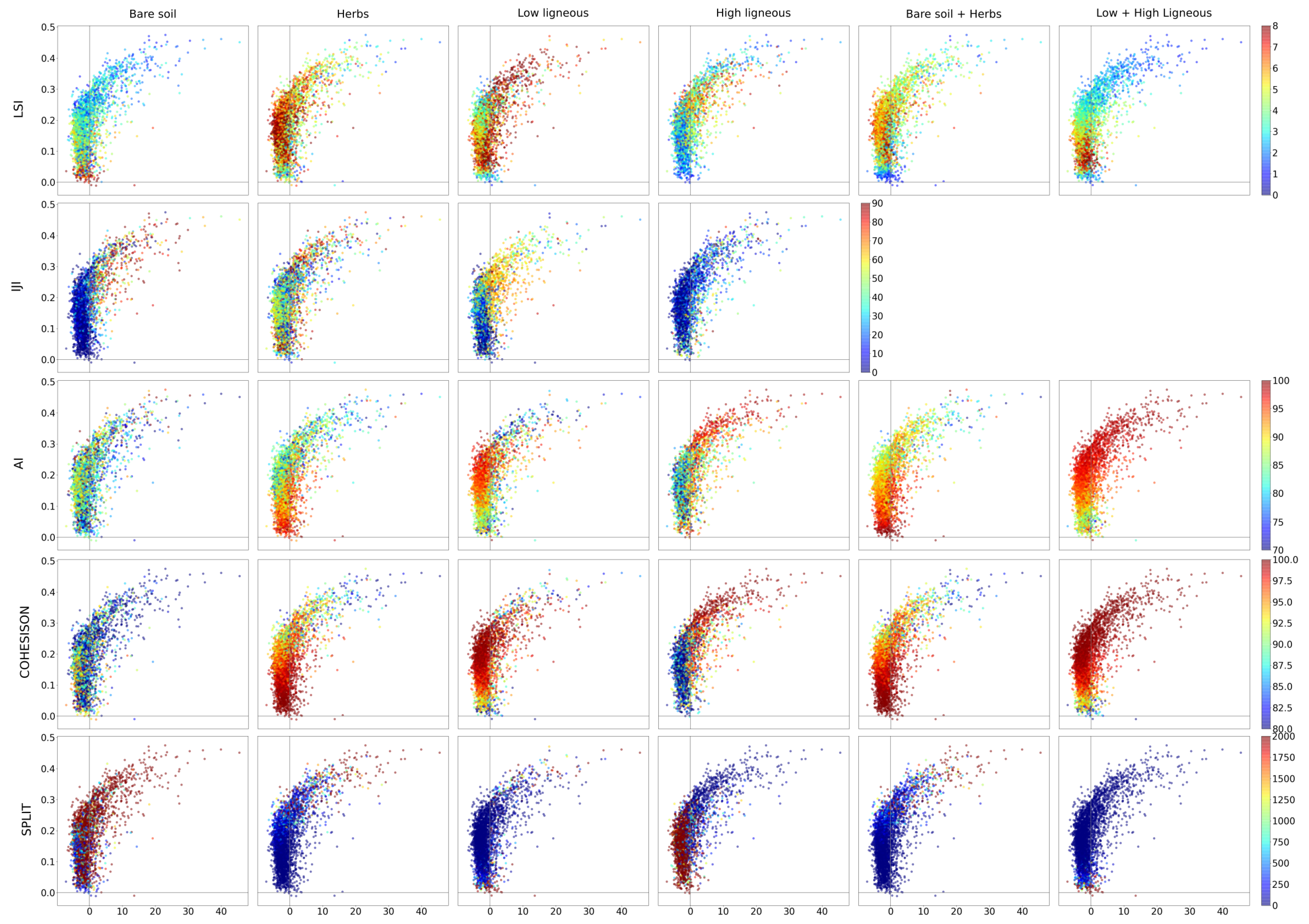
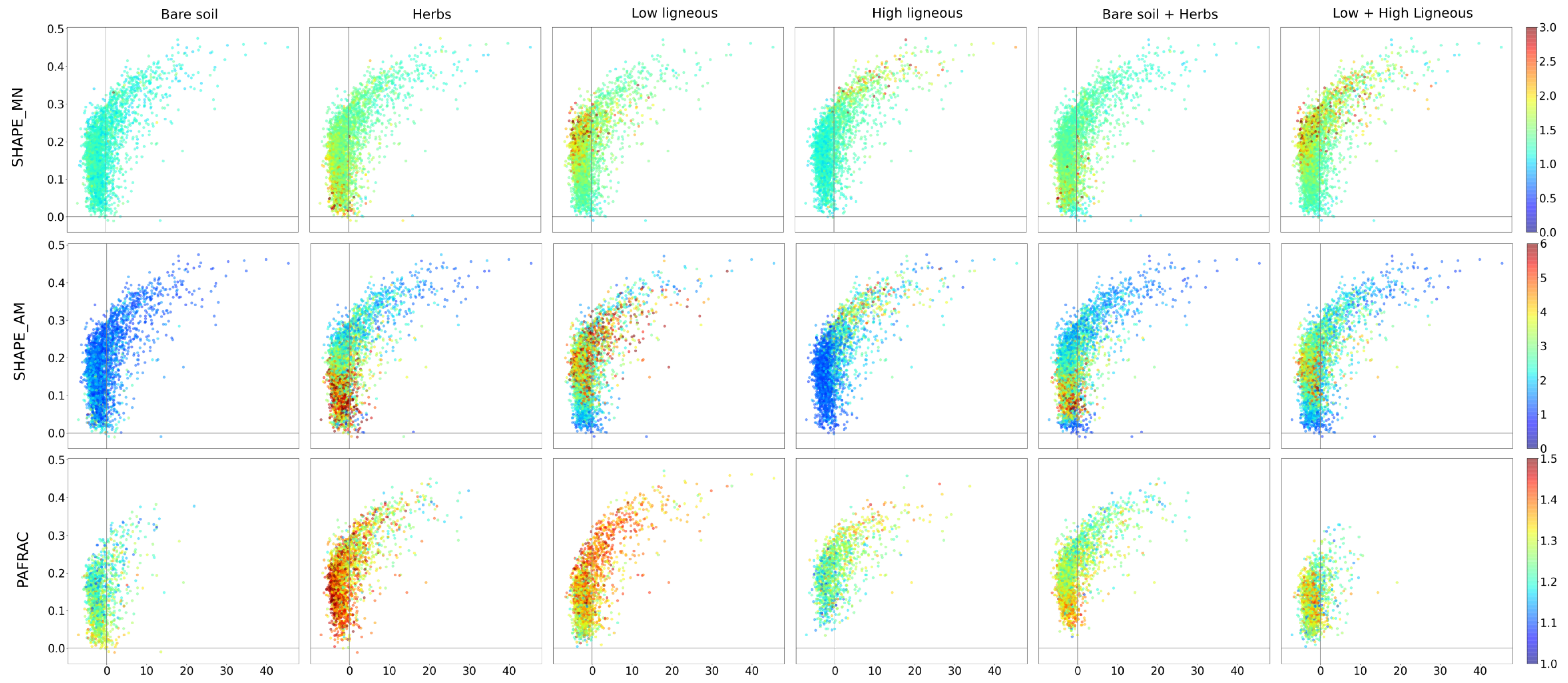
42]. In order to minimize redundancy and computational cost, a correlation analysis was performed to select a limited set of uncorrelated metrics from each group of metrics. The final selection resulted in one area metric, three shape metrics, and five aggregation metrics. Area metrics are related to the proportion of a stratum in the landscape with no information on its spatial distribution. Shape and aggregation metrics are related to landscape configuration; the former in terms of the complexity of patch shape, and the latter in terms of spatial aggregation of the same patch type.
Table 2 lists all the selected indices of landscape patterns. The landscape metrics were computed with the vegetation classes delineated applying the eight neighbours rule. Each window was analyzed separately, and the window boundaries were not counted as edges.
2.5. Coarseness Gradient Computation
The textural gradients were generated with the FOTO method. FOTO combines two-dimensional Fourier transform and principal component analysis (PCA) techniques in order to ordinate image subsets according to their frequency content along a coarseness gradient [
37]. First, a spatial sampling matching with the spatial sampling used to compute landscape metrics was performed, leading to elementary spatial units (or windows) of size
N (
Figure 1, step 4). Next, a Fourier transform was applied on each window and a radial spectrum (r-spectrum) was computed (
Figure 1, step 5). Then, a PCA was performed and scores on the first prominent axes were used as textural indices after a loading rotation (
Figure 1, step 6). In this study, the FOTO method was performed using the Matlab package used by Proisy et al. [
43].
2.5.1. 2D Fast Fourier Transform and R-Spectra
Only broad outlines of the spectral analysis based on Fourier transform are provided here since many references describing the procedure are already available (e.g., [
37,
43,
44,
45]). First, the NDVI image was windowed into square windows of homogeneous size (
Figure 1, step 4). Three percent of the study area corresponding to vineyard or tree plantations was masked, as they produce a very specific periodic pattern and bias the analysis. Then, a fast Fourier transform (FFT) was computed for each window of the original image. FFT aims at expressing the variance of an image as a weighted sum of cosine and sine waveforms of varying travelling direction and spatial frequency [
37]. Following FFT, a periodogram I was computed for each window and defined by individual elements
corresponding to the portion of variance in NDVI explained by a given wavenumber
r and travelling in direction
[
45]. The wavenumber is defined as the number of times a waveform signal is repeated in the window’s travelling direction
[
37]. For each spatial frequency, an azimuthally averaged radial spectrum (r-spectrum)
was produced by averaging values on all travelling directions (
Figure 1, step 5).
FOTO provides a convenient way to quantify coarseness-related properties with no prior directional assumption by studying the decomposition of variance among spatial frequencies, and proved to be useful for analyzing landscape patterns [
37]. We expressed wavenumber as spatial frequencies
f in cycles per kilometer.
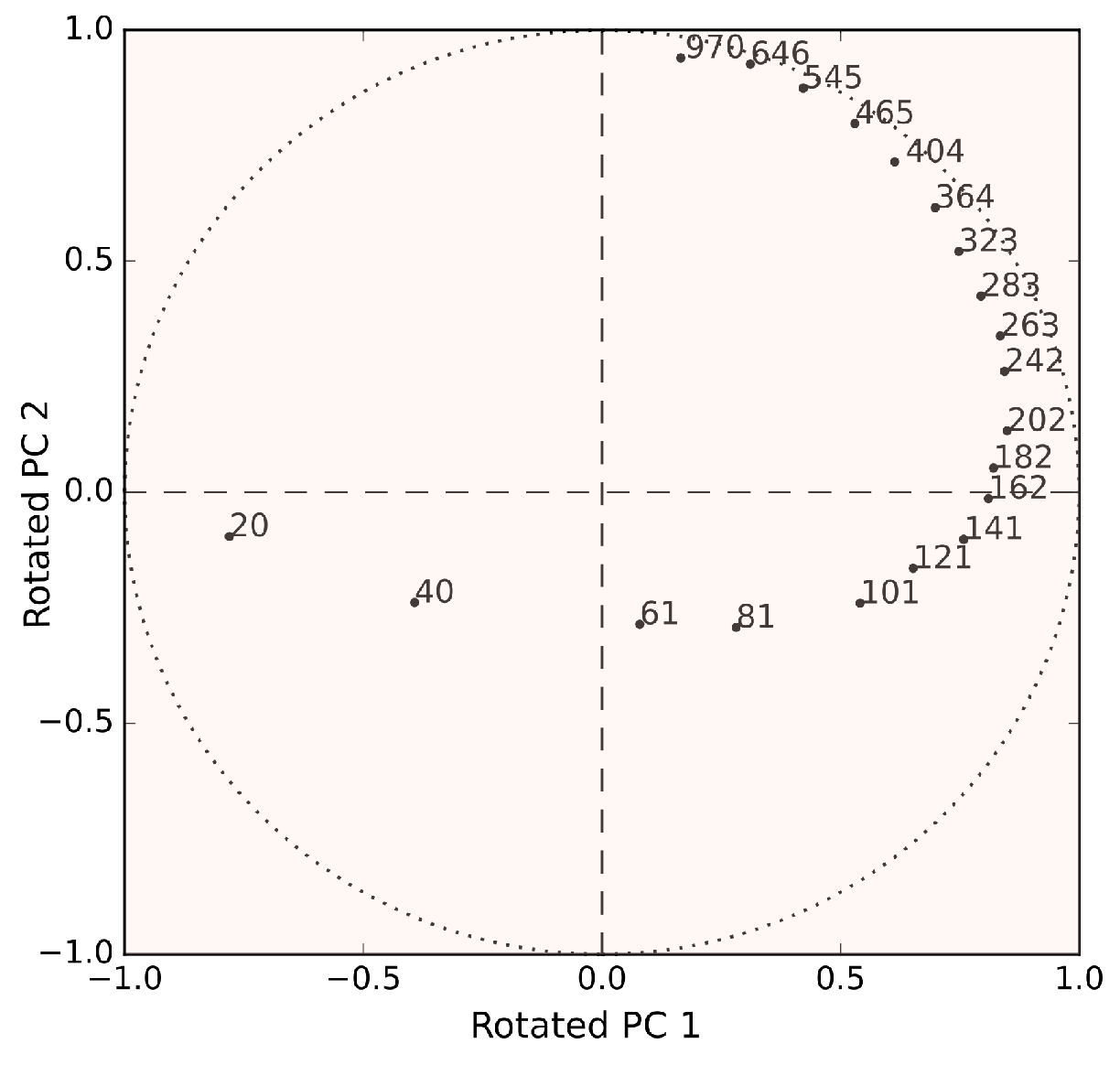
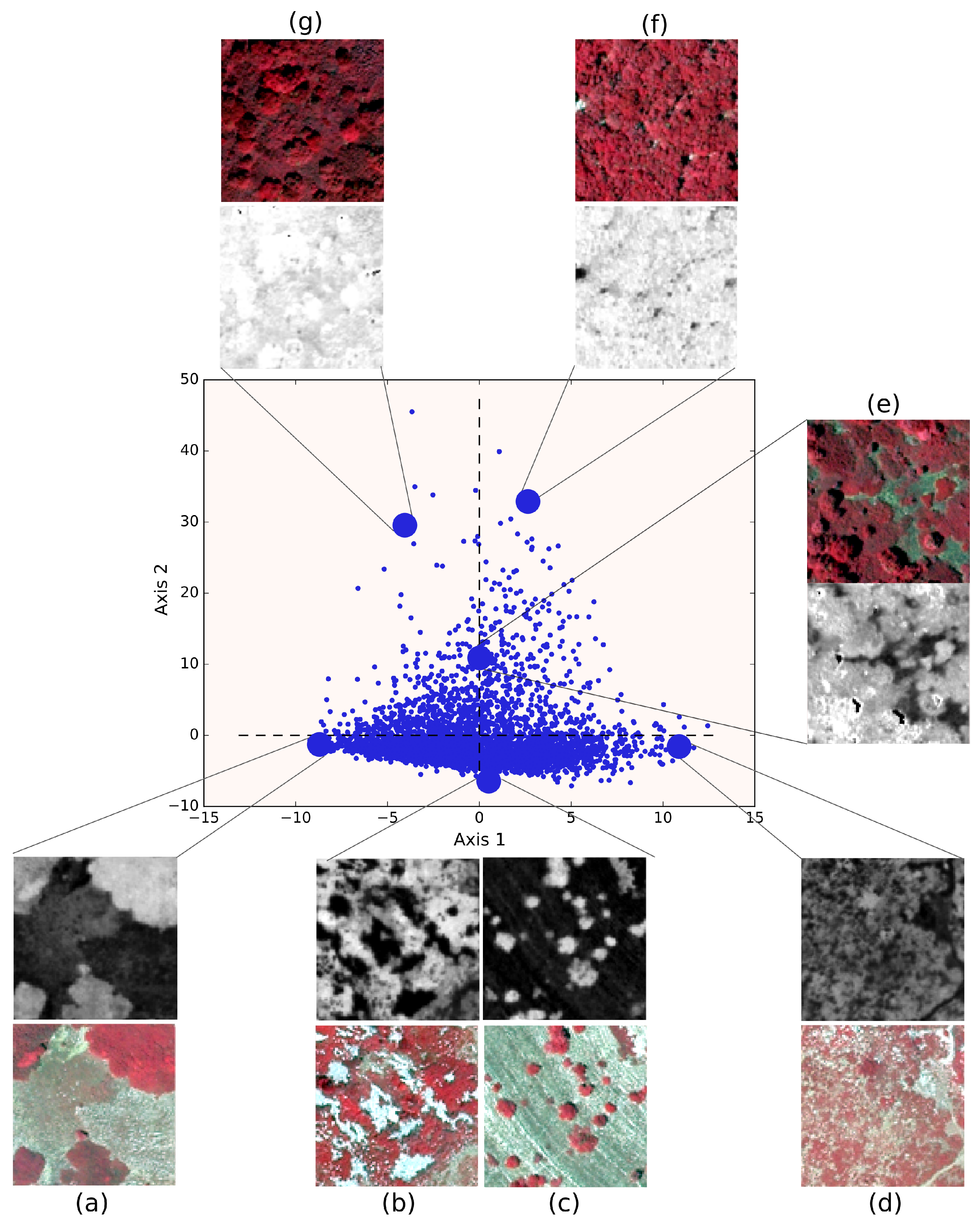
2.5.2. Textural Ordination
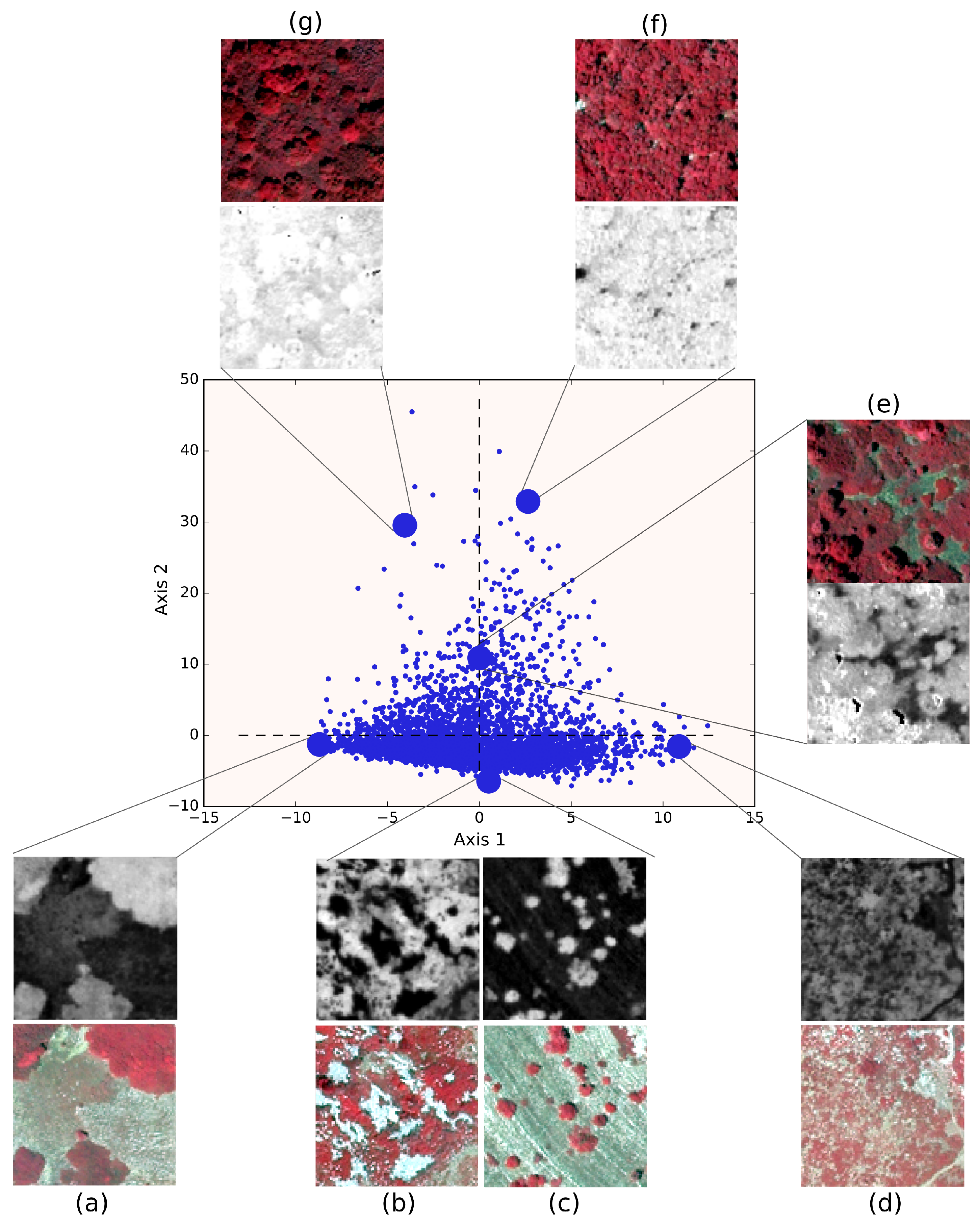
A table compiling the r-spectra was produced, each row corresponding to the r-spectrum of a given window, and each column corresponding to a spatial frequency. Then, a PCA was applied to this table [
46]. The table was standardized prior to PCA in order to avoid excessive influence of low spatial frequencies [
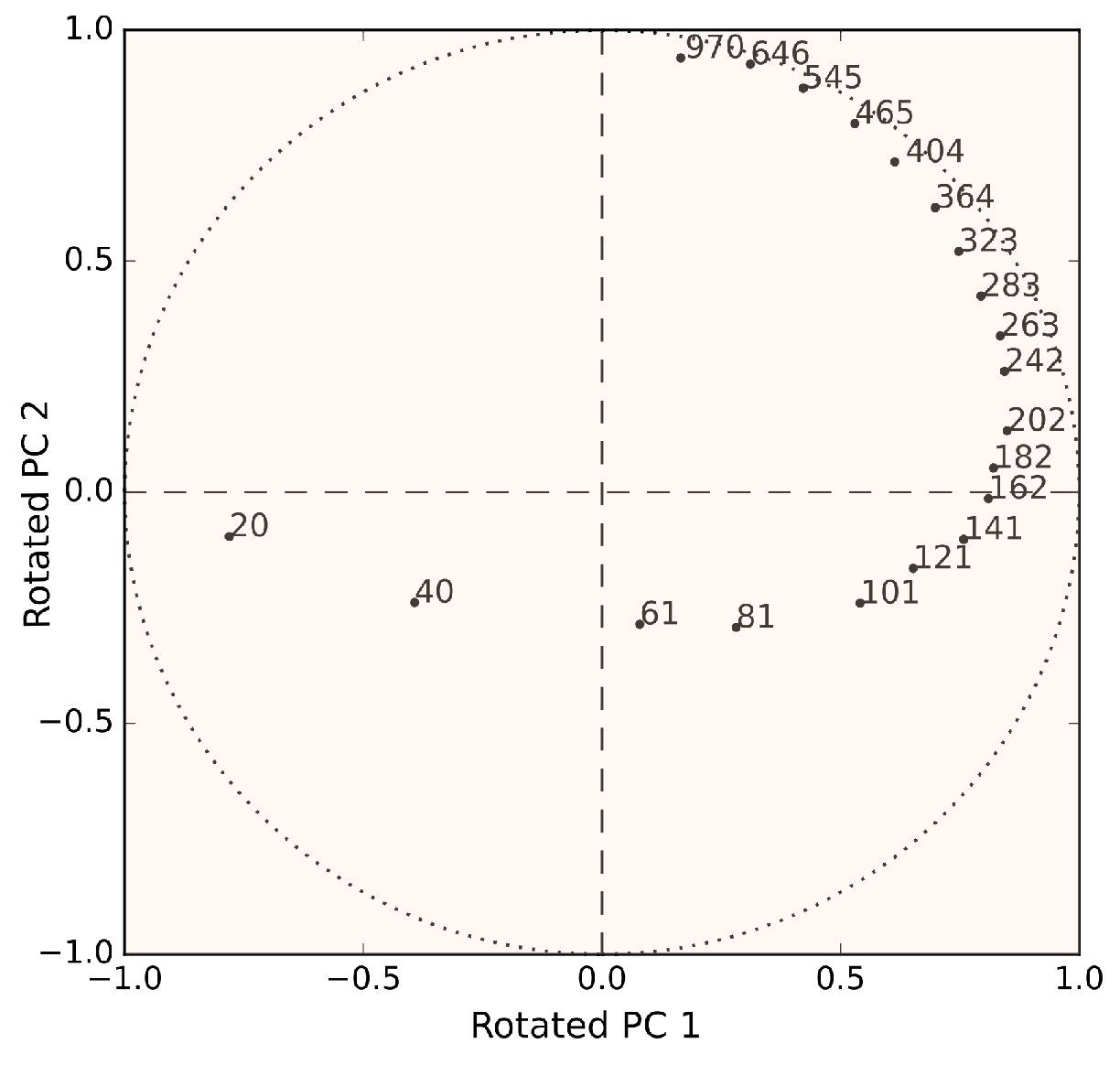
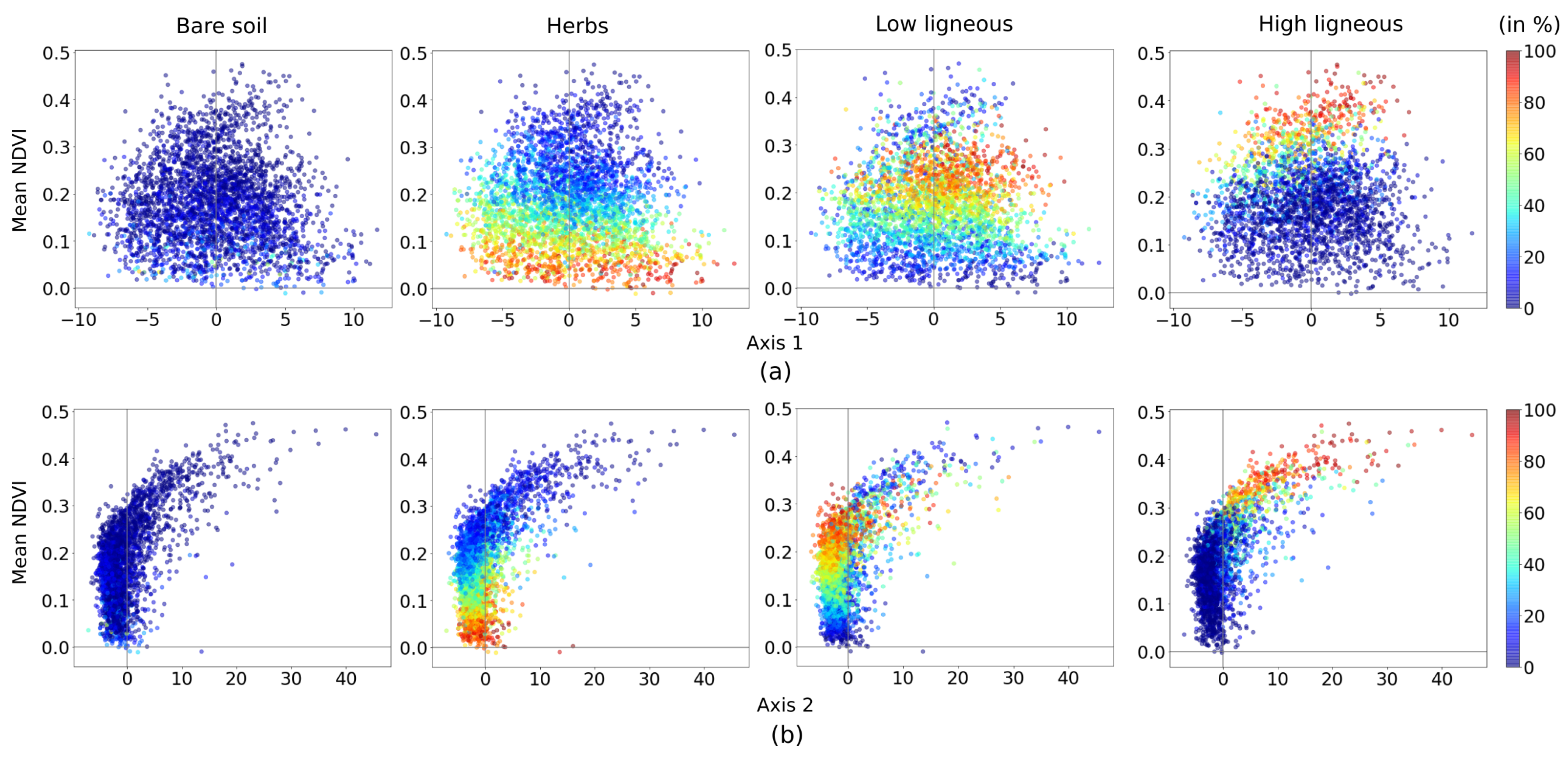
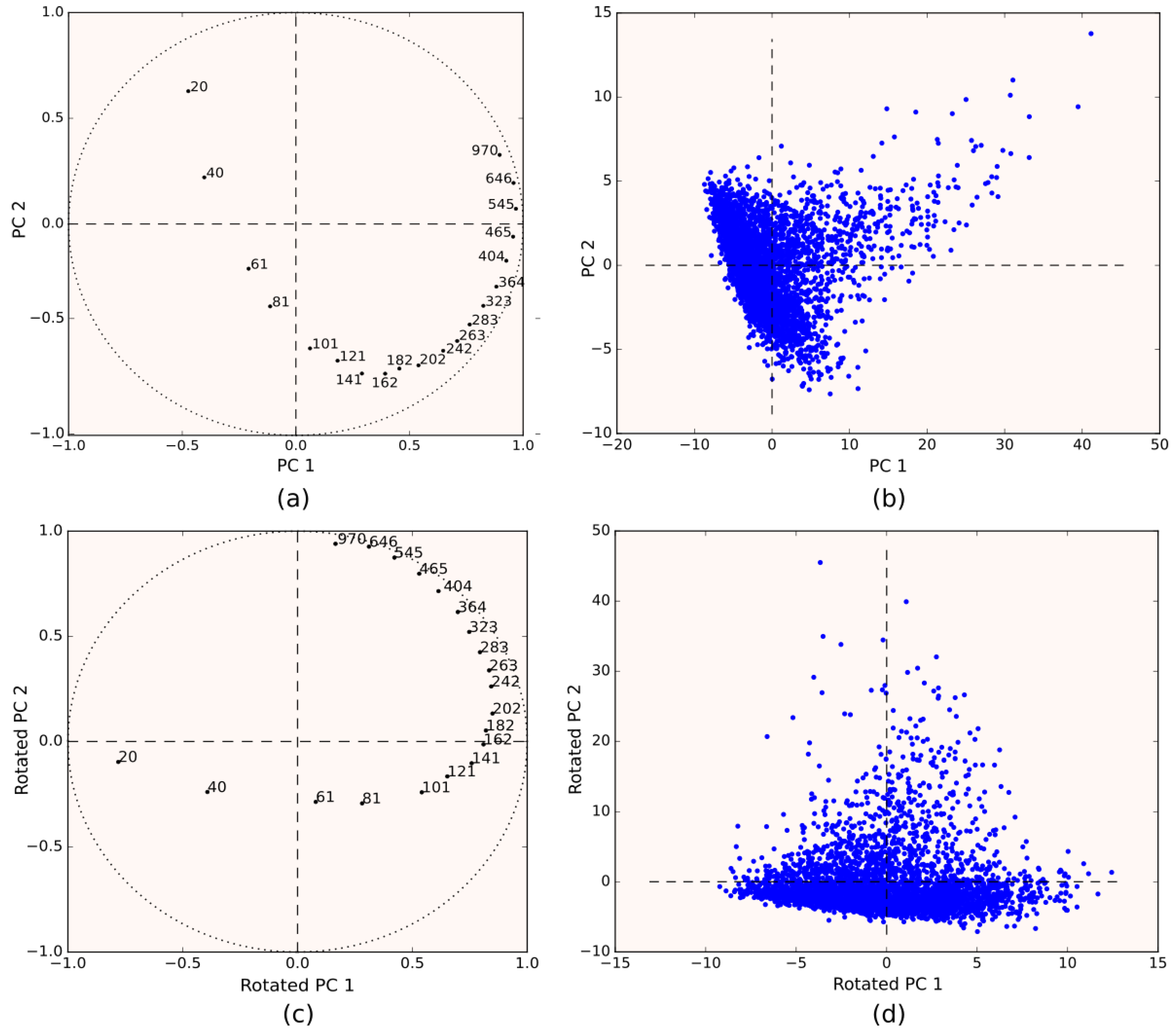
37]. The main axes resulting from the PCA could be linked to the texture, and the first two are usually related to the following orthogonal coarseness gradients in the literature [
37,
43]: the first axis usually corresponds to a coarseness gradient that evidences the contrast between coarse texture and fine/very fine texture, and the second axis to another coarseness gradient evidencing the contrast between intermediate–coarse texture and very coarse or very fine texture. Fine and very fine textures are generally linked to densely forested areas due to canopy grain, and the first gradient described previously is particularly useful when linking textural metrics with canopy structure of Amazonian forests [
47] or development stages in dynamic mangroves [
43]. However, when studying the semi-open landscapes, the forest can be considered as secondary compared to intermediate–coarse or fine texture linked to patterns made by patches of dense ligneous vegetation included in a matrix of bare soil and herbaceous vegetation. In that respect, the first gradient was not the most relevant in the context of this study. Therefore, in order to simplify the interpretability of our results, we performed an orthogonal rotation aiming at defining a new first axis, evidencing the contrast between very coarse and intermediate or fine texture, which was thus better related to semi-open landscape structure.
The rotated axes remain orthogonal and explain the same global amount of variance as the initial coarseness gradients. However, as the rotation was performed for optimal interpretation, and the definition of the first rotated axis is arbitrary and application dependent, the variance explained by the first rotated axis may be lower than the variance explained by the second rotated axis.
2.5.3. Coupling FOTO Outputs with Landscape Metrics
In the final step of the process, the ability of textural information and radiometric information to predict landscape metrics was tested with regression models based on support vector machine (SVM). We used a nonlinear radial basis function kernel. The regression involved three steps. First, the full dataset was split into a training dataset and a validation dataset, and the optimal values of the free parameters of the SVM (cost (
C) and gamma (
)) were identified based on an exhaustive grid search strategy with cross-validation on the training dataset. The space defined by values ranging from
to
was explored for both parameters. Then, the model was trained with the full training dataset and
C and
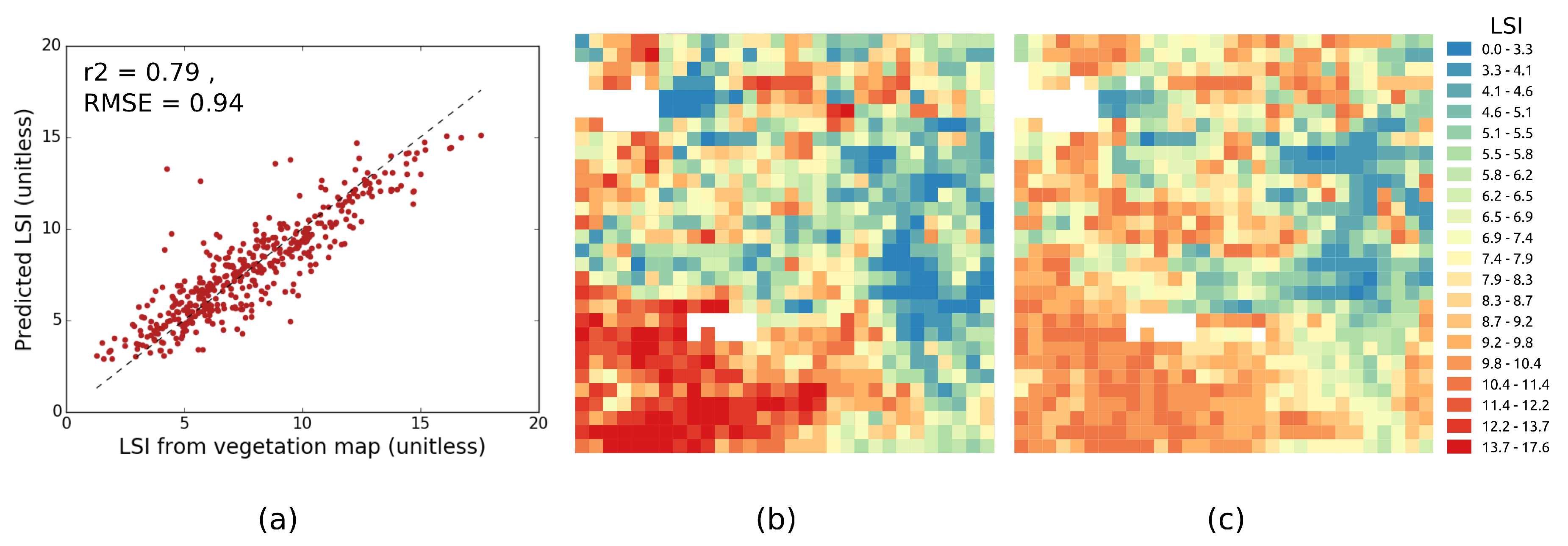
set to their optimal values defined in the first step. Finally, the resulting mode was applied on the validation data set. We used the coefficient of determination (Equation (
1)), with
the measured values,
the predicted values, and
the mean of measured values as fitness quality criterion for the models.
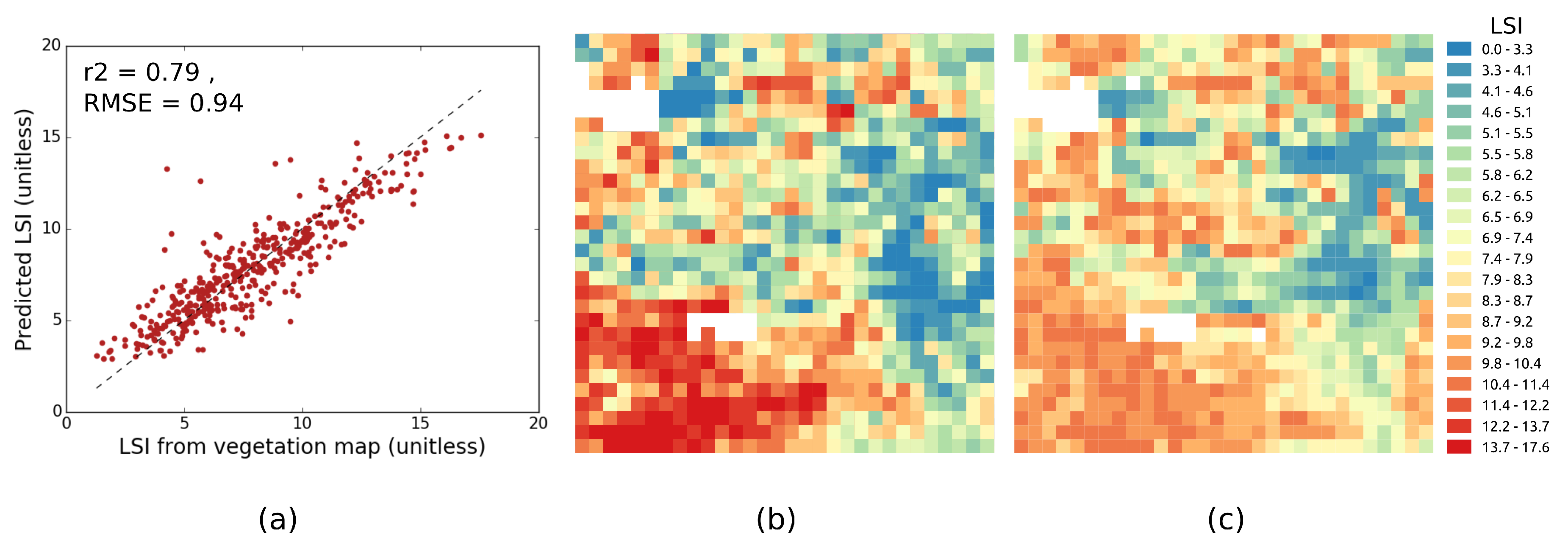
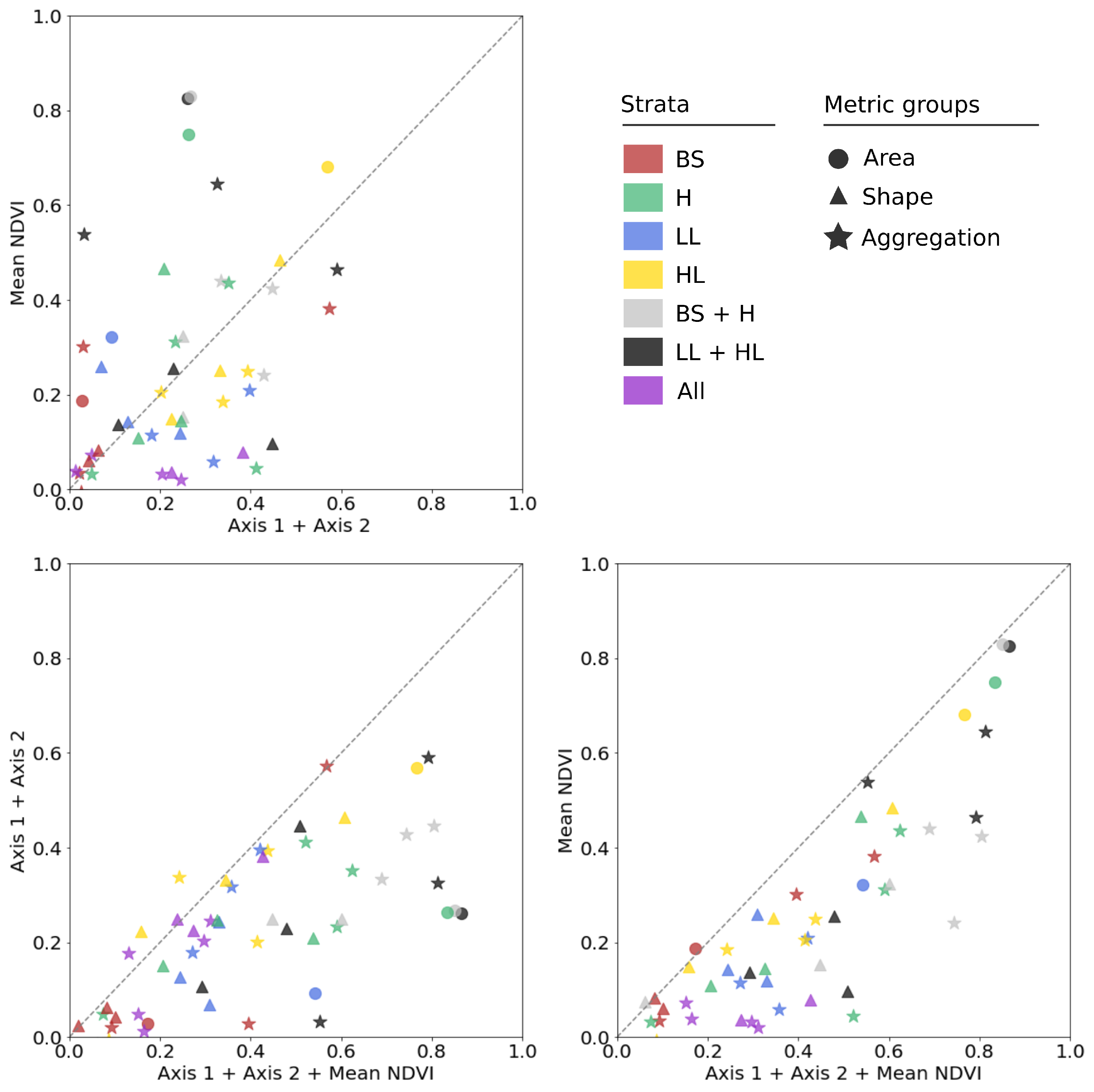
In order to test the synergy between the mean NDVI and FOTO indices, we adjusted regression models based on the two first rotated axes obtained from FOTO only, mean NDVI only, and the combination of the two first rotated axes and the mean NDVI. Indeed, the Fourier decomposition is insensitive to opposite patterns in terms of radiometric information: patches of bare soil and herbaceous vegetation included in a matrix of dense ligneous vegetation may show the same textural information as patches of dense ligneous vegetation included in a matrix of bare soil and herbaceous vegetation [
37]. Thus, two windows can have similar coarseness attributes but very different vegetation structure. Here, each metric was predicted from three different sets of variables: FOTO indices only, mean NDVI only, and a combination of both FOTO indices and mean NDVI. Regression models were finally used to spatially predict landscape metrics and produce a spatial representation of these landscape metrics.
2.5.4. Mapping FOTO Indices Enhanced with Mean NDVI
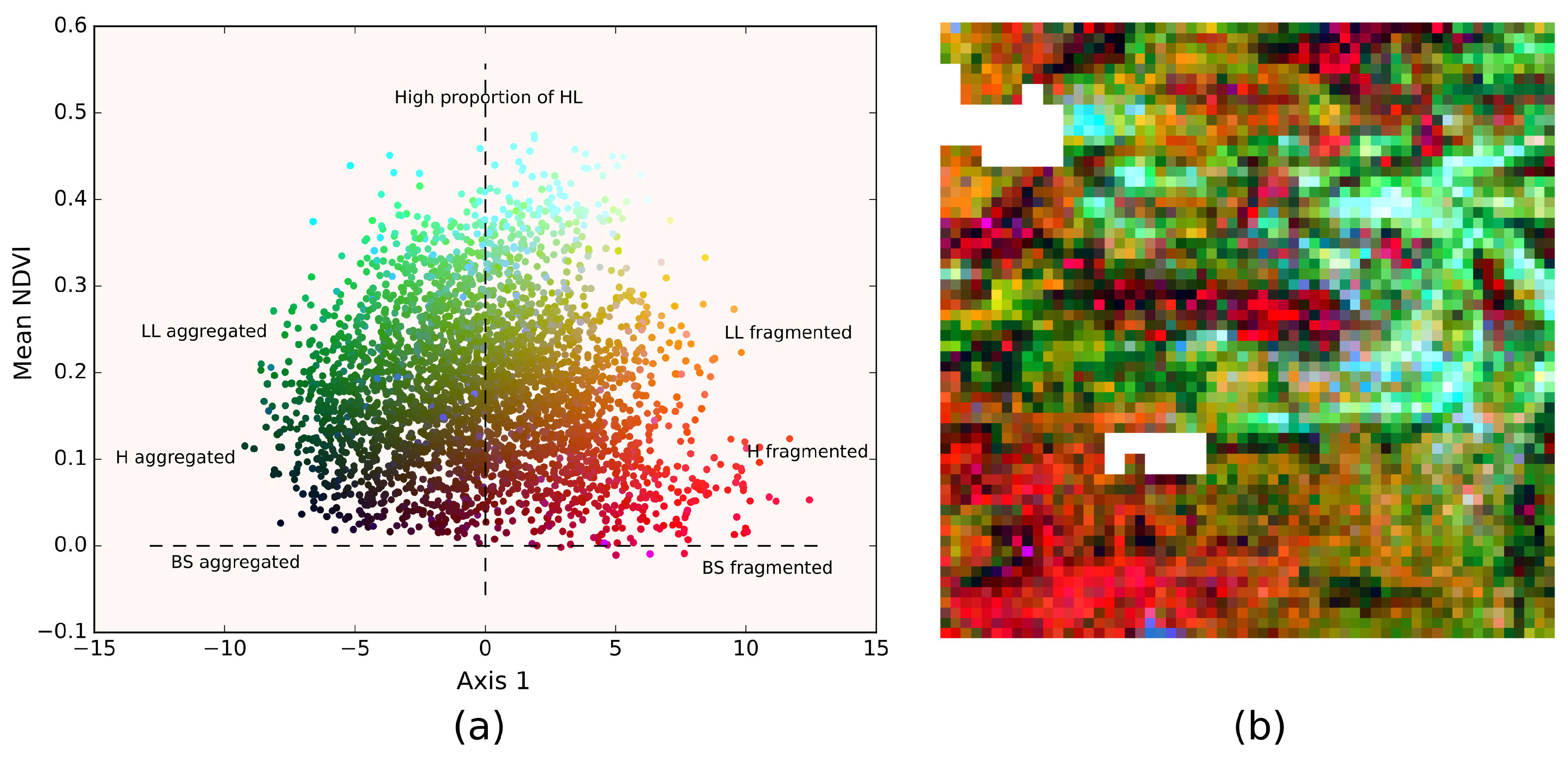
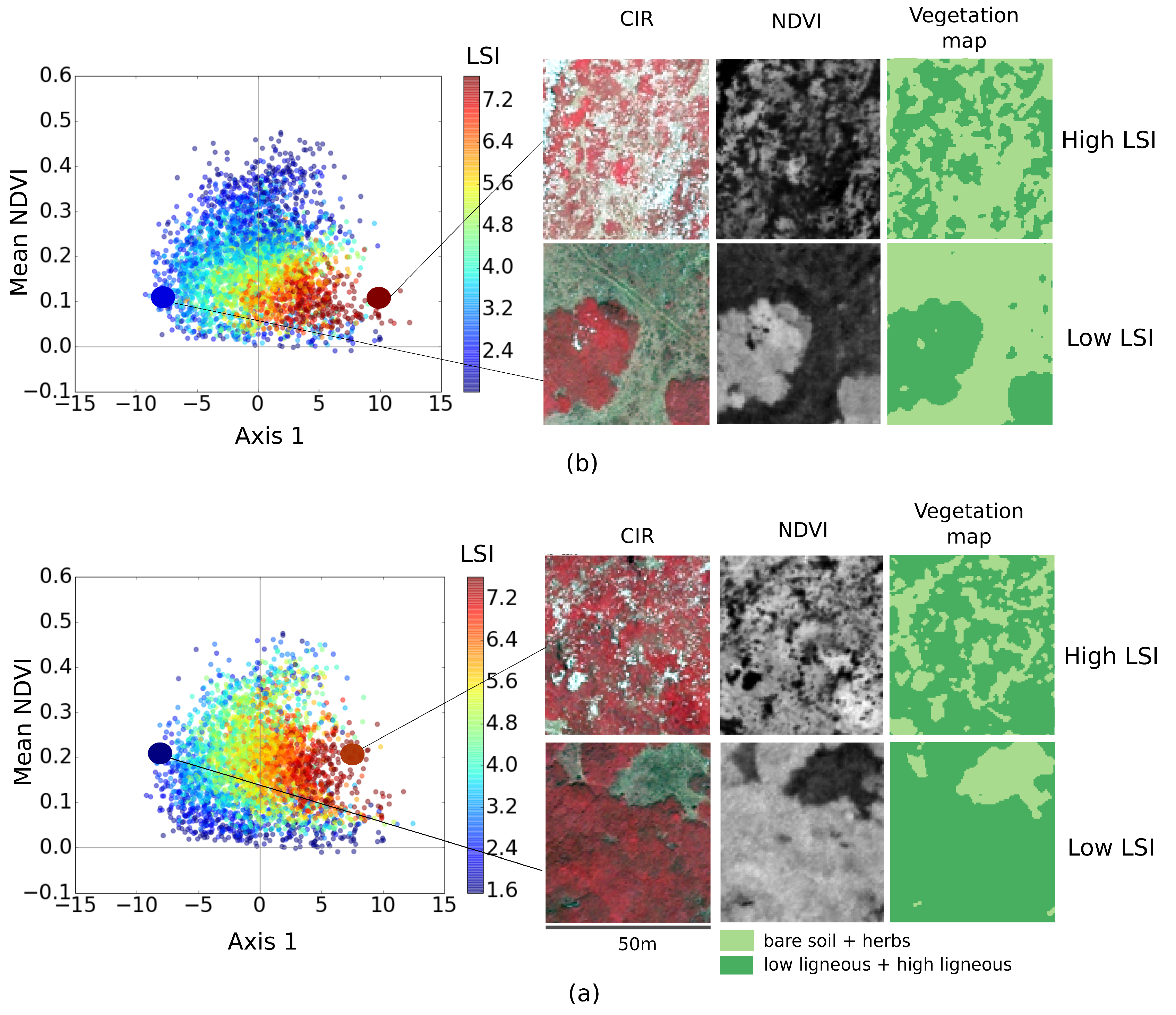
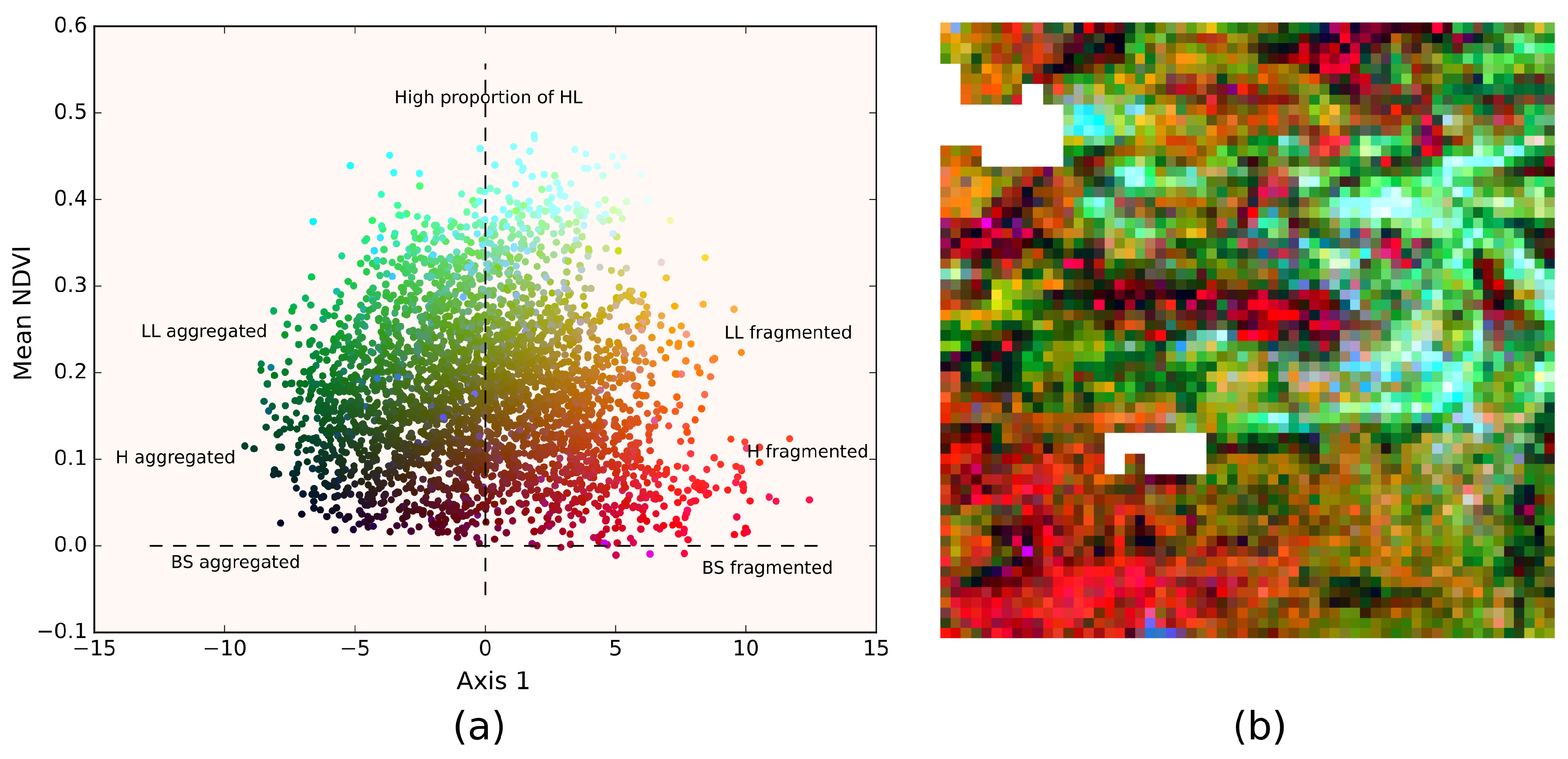
We tested the potential of the combination of textural ordination and radiometry as a straightforward tool for characterizing vegetation organization with synoptic representations. We hence represented the two first rotated components of PCA and the mean NDVI as a composite red–green–blue image [
43], with the colours corresponding to window scores for the first rotated axis, the mean NDVI value, and the second rotated axis respectively.
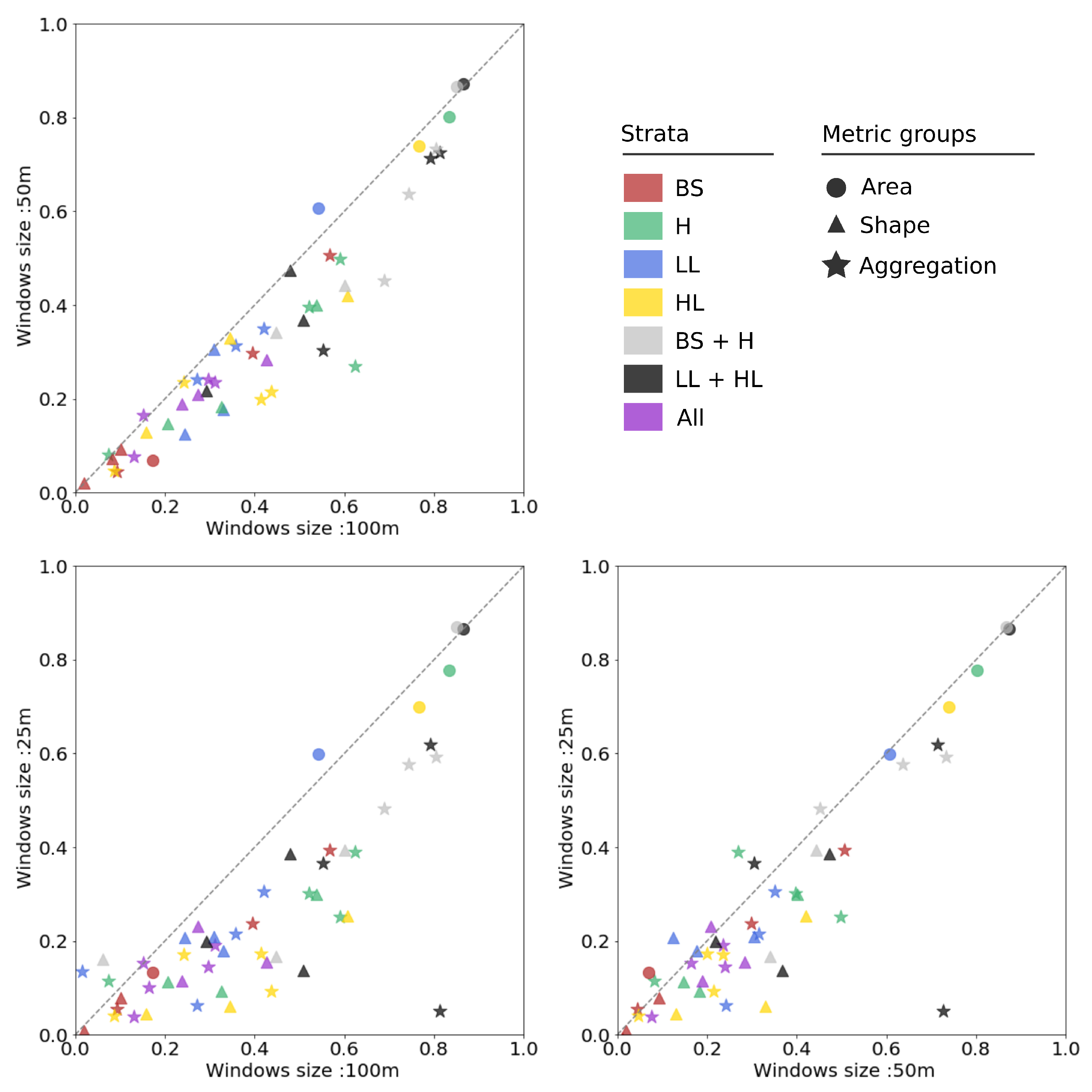
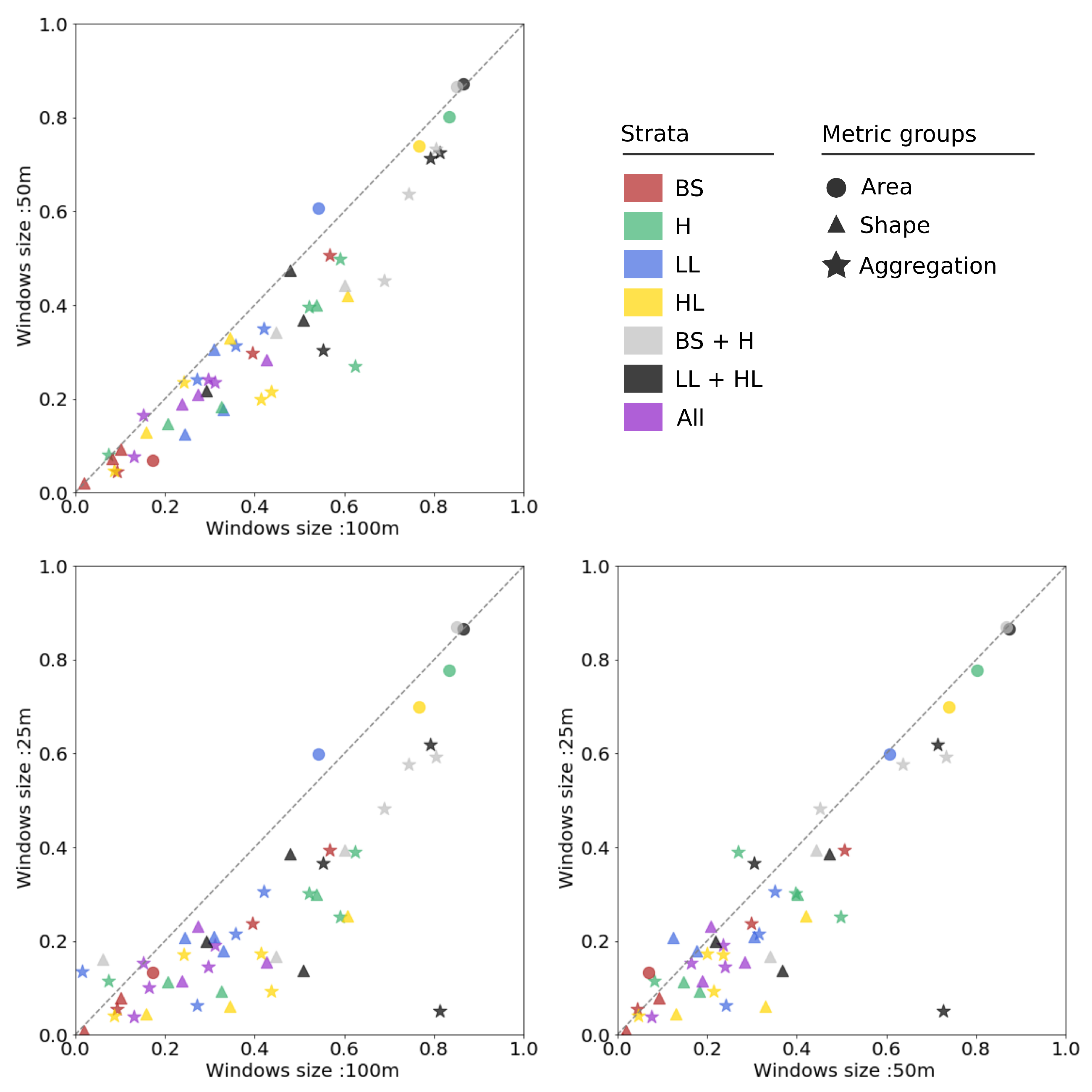
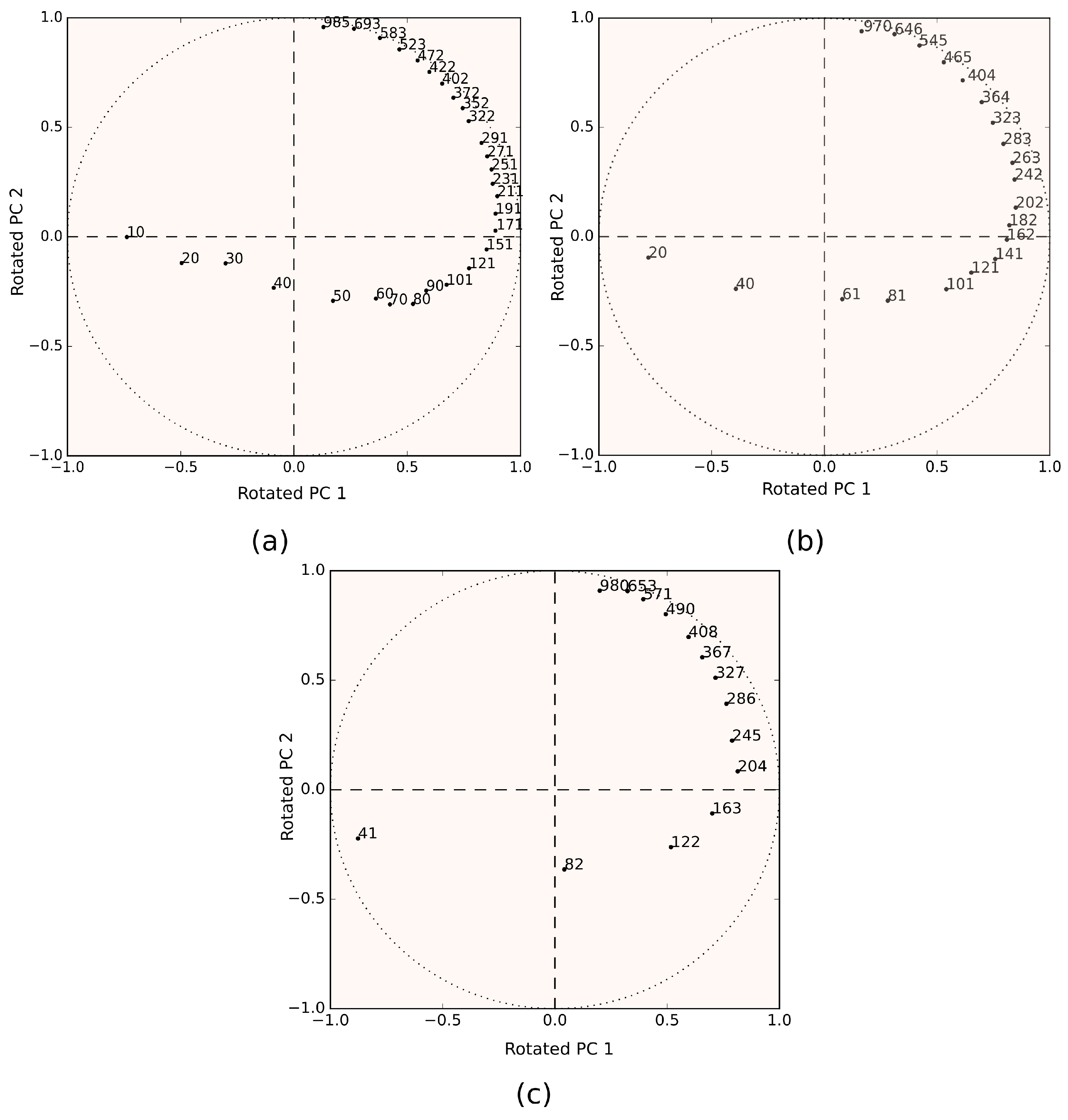
The spatial resolution of the resulting maps corresponds to the window size used for the FOTO analysis and the computation of the landscape metrics. Increasing the spatial resolution of the maps to get more spatial details on vegetation organization implies reducing the window size for FOTO analysis and thus not taking into account low spatial frequencies that may be of interest for the characterization of vegetation strata structure. As window size is a compromise between spatial resolution of textural maps and the number of frequencies included in the analysis, we tested the influence of three different window sizes on the synoptic landscape maps: 25 m, 50 m, and 100 m.
5. Conclusions
Continuous approaches are still not widely used for ecological conservation application, mostly because they are difficult to interpret. However, they present great potential in the characterization of vegetation pattern, especially for highly fragmented/patchy habitats. The present approach proposes the use of three continuous indices, two independent textural indices derived from a Fourier-based ordination and the mean NDVI, as summary indicators of vegetation structure. They show particular potential because they are relatively straightforward while at the same time they do not require the parameterization of a particular classification scheme that can be very expert-demanding and bias the resulting landscape metrics.
The present framework shows great potential in operational monitoring systems for habitat conservation programs. It can be potentially reproduced over large areas with minimal adaptation to the specific context. Hence, it contributes towards the development of generic and simple tools for the monitoring of habitats of high interest. It also seems promising for various other applications, such as fire risk prevention, grazing management, or bird community conservation that also require reliable information on vegetation structure. If produced periodically, this approach can help in the long-term analysis of heterogeneous dynamic habitats such as in the case of Mediterranean ecosystems, which can help to monitor changes in the conservation state of habitat and biodiversity closely related to landscape heterogeneity.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}