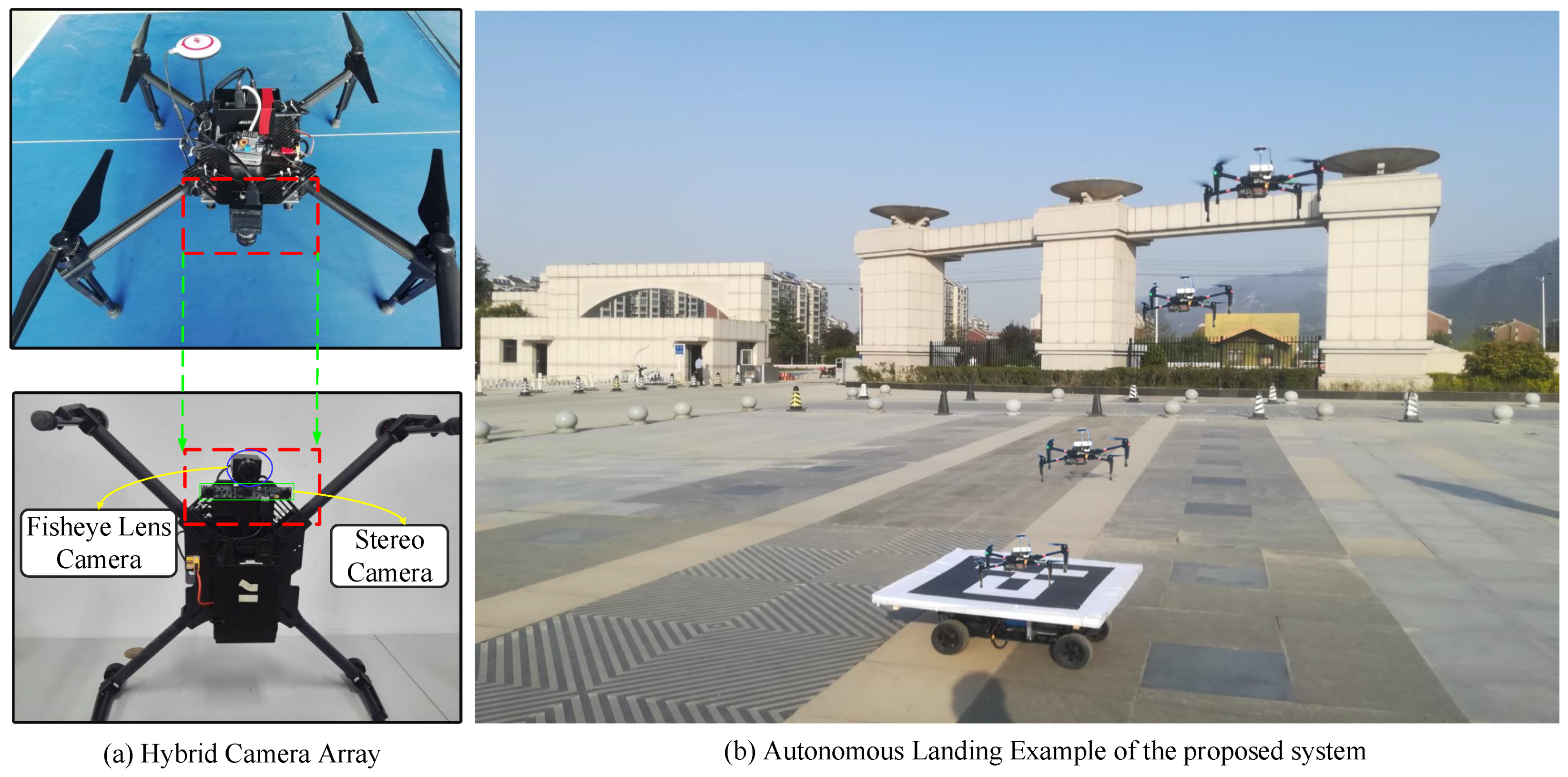
Figure 1.
UAV autonomous landing system based on a hybrid camera array. (a) Hybrid camera array, including a fisheye lens camera and a stereo camera; (b) An autonomous landing example using the proposed system.
Figure 1.
UAV autonomous landing system based on a hybrid camera array. (a) Hybrid camera array, including a fisheye lens camera and a stereo camera; (b) An autonomous landing example using the proposed system.
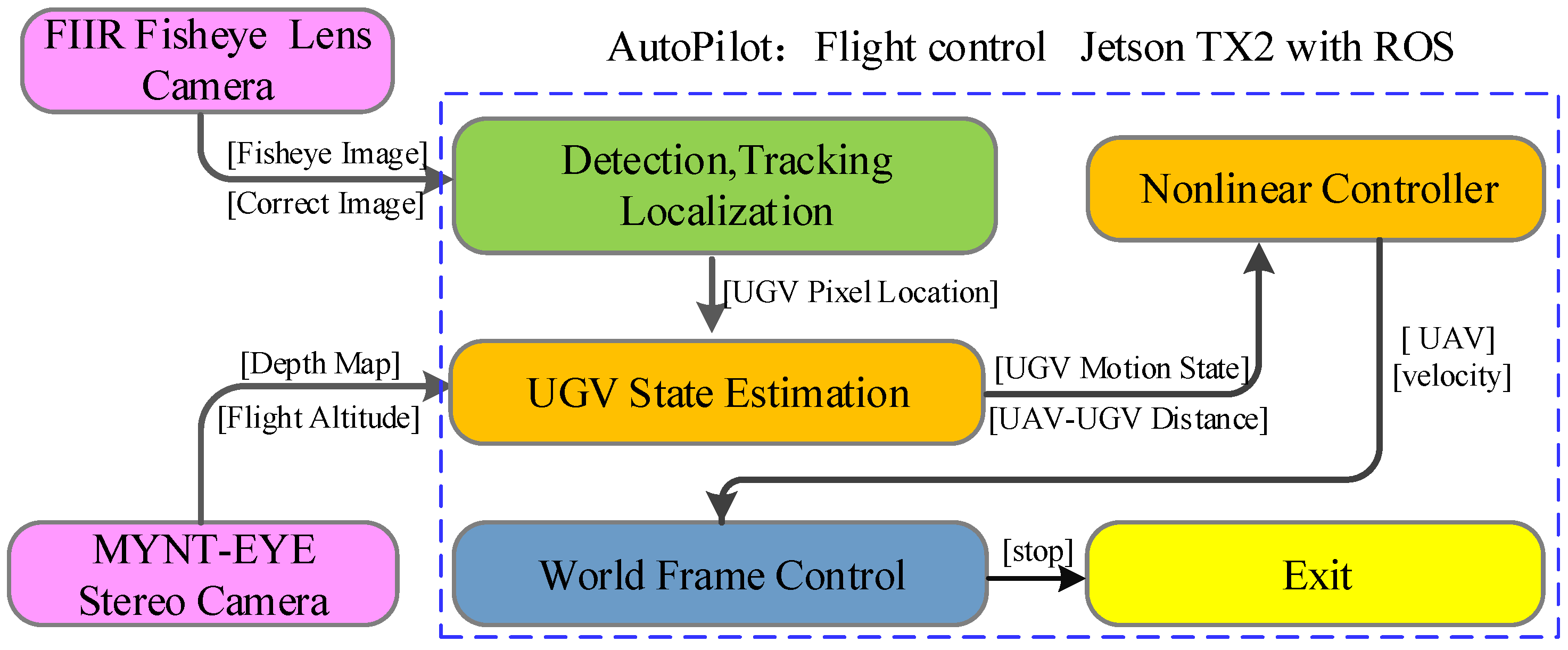
Figure 2.
The control architecture diagram of the proposed system. It shows the data transmission from the hybrid camera array to the target location and state estimation, then to a nonlinear controller.
Figure 2.
The control architecture diagram of the proposed system. It shows the data transmission from the hybrid camera array to the target location and state estimation, then to a nonlinear controller.
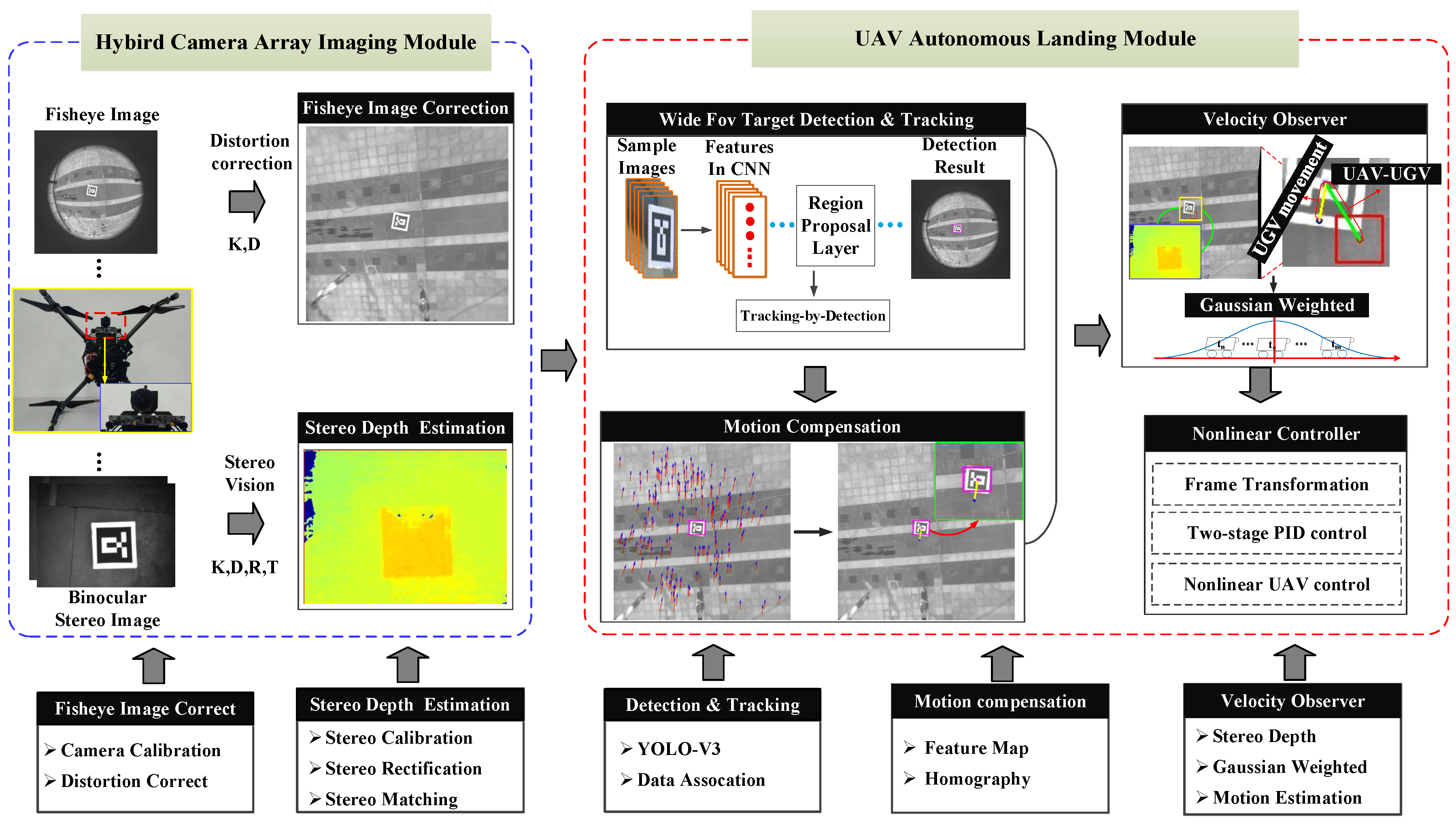
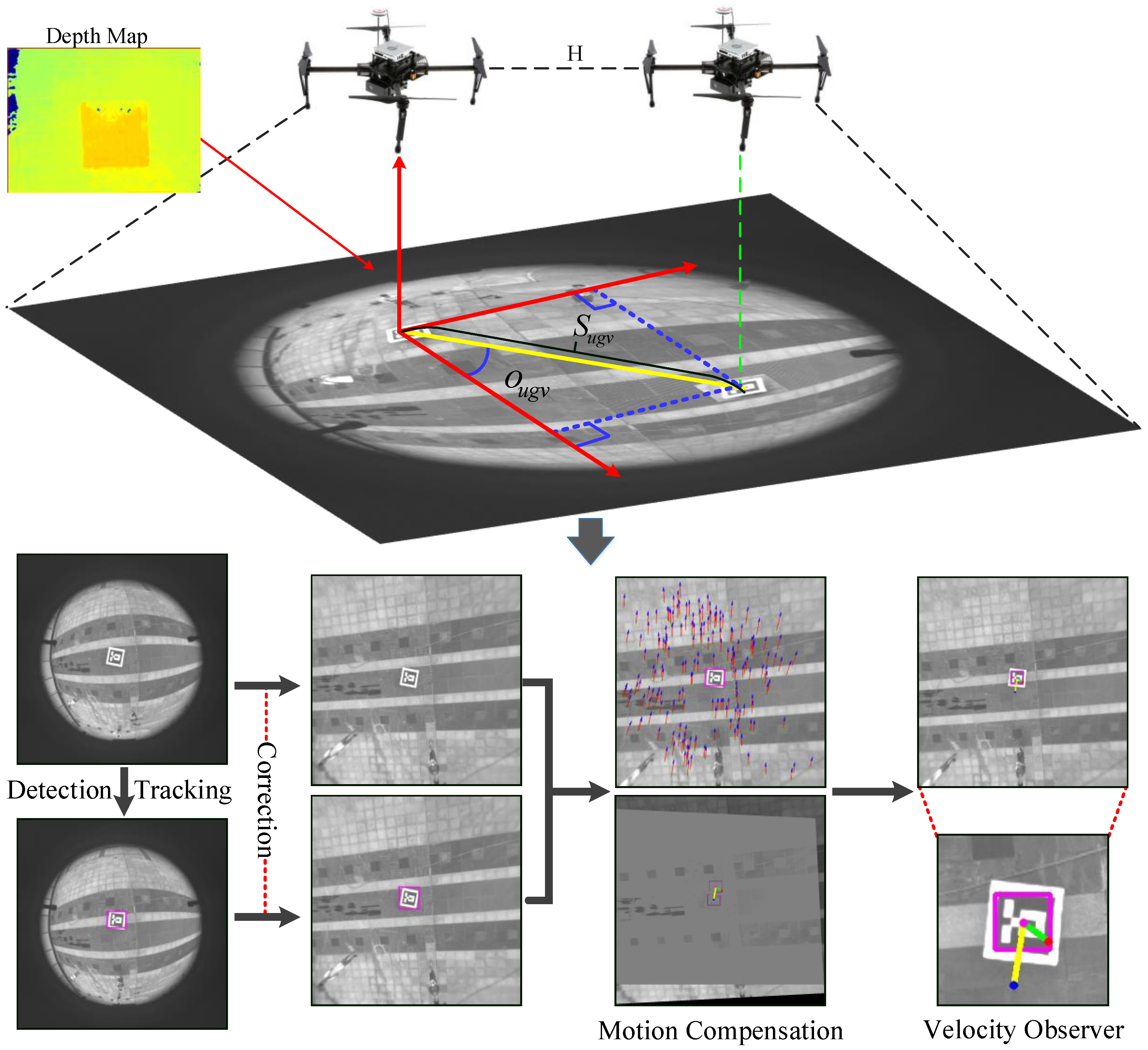
Figure 3.
An overview of our landing system. This system contains two main parts: a hybrid camera array imaging module and a UAV autonomous landing algorithm module.The first part shows imaging using a fisheye lens camera and a stereo camera, which were employed to build our imaging system. In the second part, our UAV autonomous landing algorithm is presented, including a novel UGV state estimation algorithm and the design of the nonlinear controller in the system. Among them, the UGV state estimation algorithm performs detection and tracking, motion compensation, and the velocity observer function.
Figure 3.
An overview of our landing system. This system contains two main parts: a hybrid camera array imaging module and a UAV autonomous landing algorithm module.The first part shows imaging using a fisheye lens camera and a stereo camera, which were employed to build our imaging system. In the second part, our UAV autonomous landing algorithm is presented, including a novel UGV state estimation algorithm and the design of the nonlinear controller in the system. Among them, the UGV state estimation algorithm performs detection and tracking, motion compensation, and the velocity observer function.
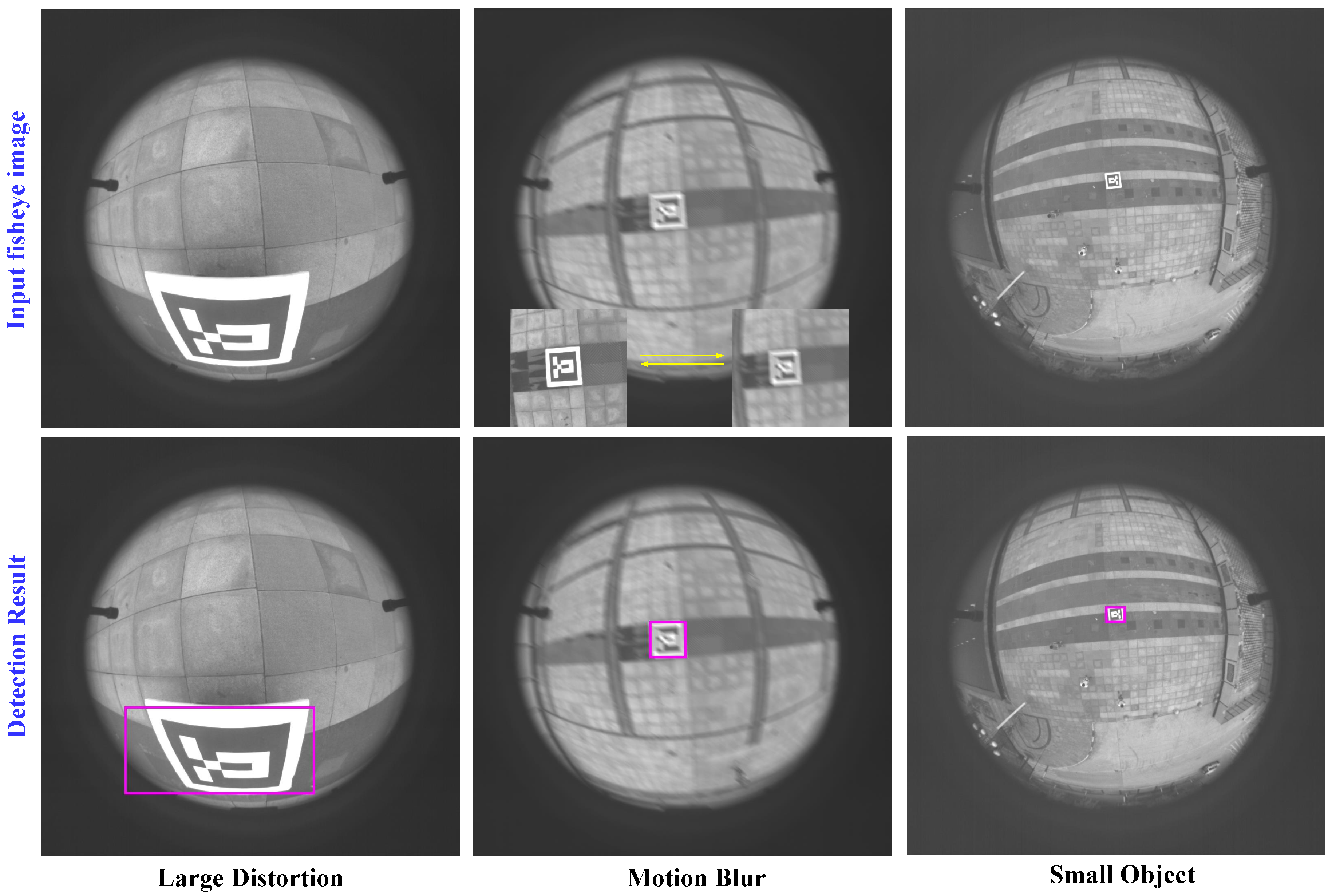
Figure 4.
Target detection results in some challenging scenarios. The top and bottom rows represent the input image and detection results, respectively, under a large distortion, motion blur conditions, and small object conditions.
Figure 4.
Target detection results in some challenging scenarios. The top and bottom rows represent the input image and detection results, respectively, under a large distortion, motion blur conditions, and small object conditions.
Figure 5.
An illustration of the proposed UGV state estimation method. It includes three parts: detection and tracking, motion compensation, and velocity observer. The yellow and green lines in the velocity observer represent the UGV’s actual movement and the distance between the UAV and UGV, respectively.
Figure 5.
An illustration of the proposed UGV state estimation method. It includes three parts: detection and tracking, motion compensation, and velocity observer. The yellow and green lines in the velocity observer represent the UGV’s actual movement and the distance between the UAV and UGV, respectively.
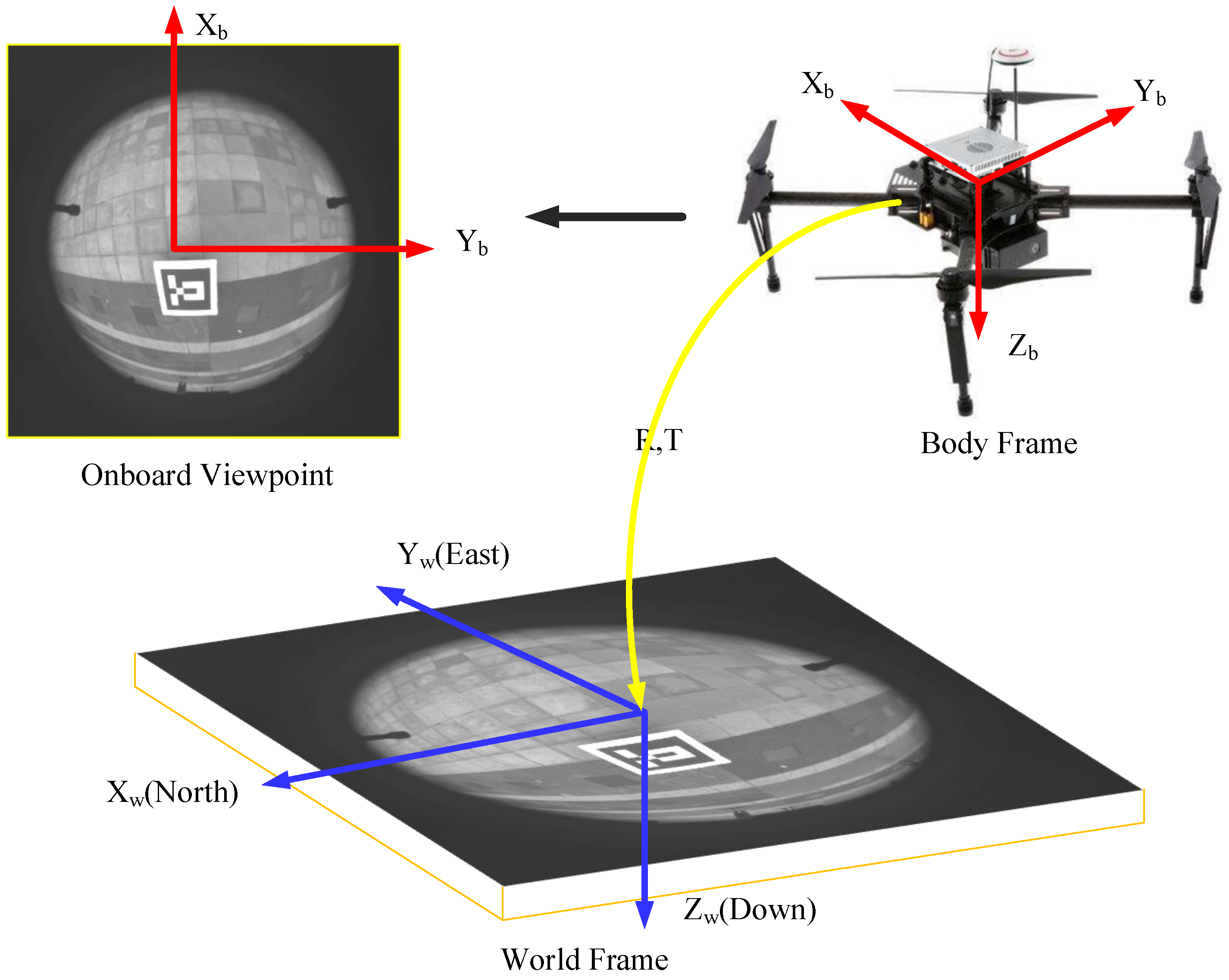
Figure 6.
The transformation between the World Frame and the Body Frame . In this system, the world frame is North East Down (NED).
Figure 6.
The transformation between the World Frame and the Body Frame . In this system, the world frame is North East Down (NED).
Figure 7.
Our simulation environment based on Microsoft AirSim. (a) A screenshot of our test environment; (b) The running simulation environment and the requiring physical equipment; (c) A schematic diagram of the autonomous landing of the UAV in our simulation environment.
Figure 7.
Our simulation environment based on Microsoft AirSim. (a) A screenshot of our test environment; (b) The running simulation environment and the requiring physical equipment; (c) A schematic diagram of the autonomous landing of the UAV in our simulation environment.
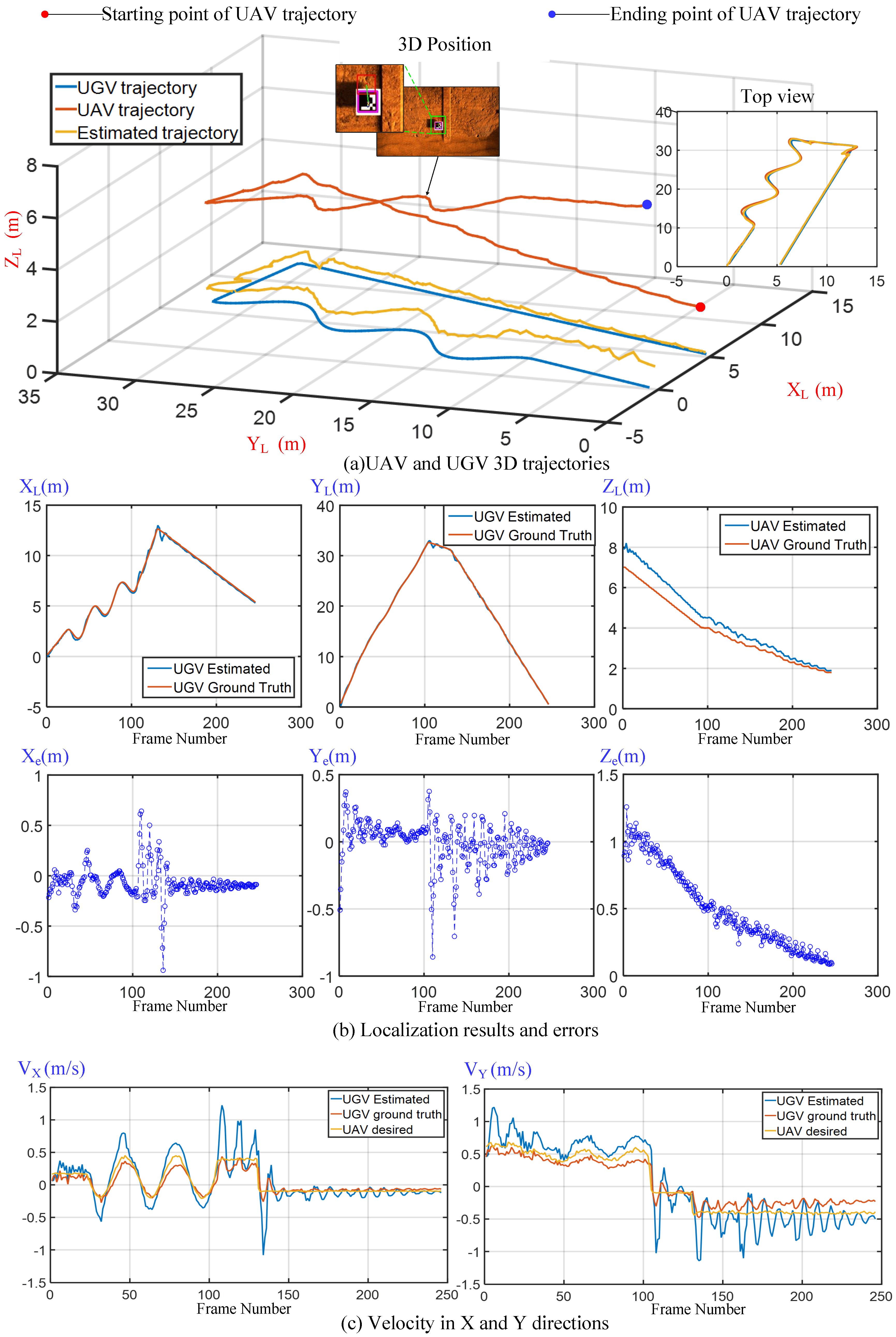
Figure 8.
The results of the quantitative analysis simulation. (a) UAV and UGV 3D trajectories; (b) The localization results and errors in the X, Y, and Z coordinates; (c) The velocities of the UGV in both X and Y directions. In the figure, , , and respectively represent the localization in the X, Y, and Z directions; , , and represent the localization errors in the X, Y, and Z directions; , represent the velocity in the X, Y directions.
Figure 8.
The results of the quantitative analysis simulation. (a) UAV and UGV 3D trajectories; (b) The localization results and errors in the X, Y, and Z coordinates; (c) The velocities of the UGV in both X and Y directions. In the figure, , , and respectively represent the localization in the X, Y, and Z directions; , , and represent the localization errors in the X, Y, and Z directions; , represent the velocity in the X, Y directions.
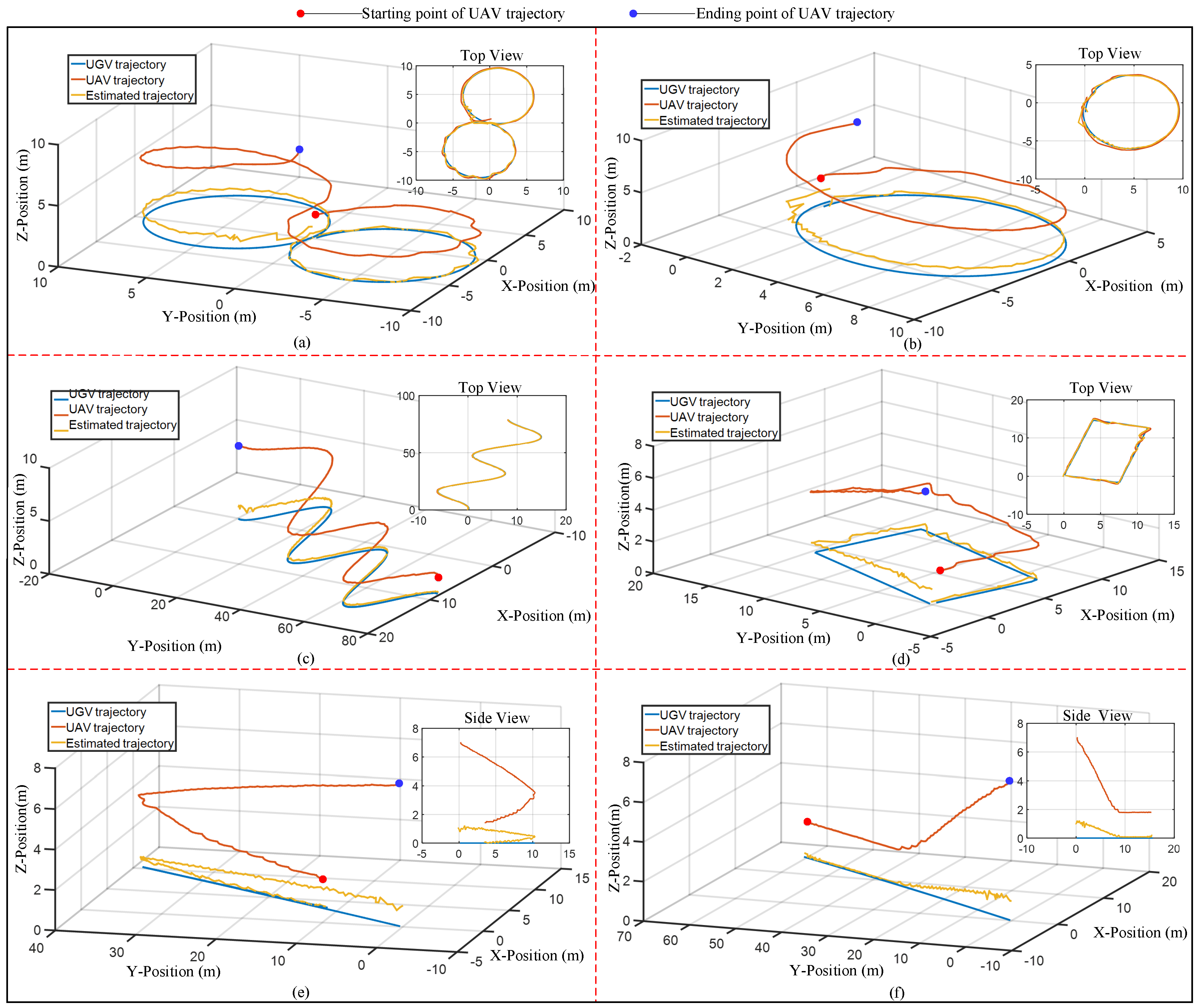
Figure 9.
The experimental results of several kinds of 3D trajectories, such as figure-of-eight, circle, S-shape, rectangle, straight line, etc. (a–c) The movement direction of the UGV is constantly changing in both the X and Y directions; (d,e) The movement direction of the UGV is changing in the X or Y direction; (f) Maintaining forward movement.
Figure 9.
The experimental results of several kinds of 3D trajectories, such as figure-of-eight, circle, S-shape, rectangle, straight line, etc. (a–c) The movement direction of the UGV is constantly changing in both the X and Y directions; (d,e) The movement direction of the UGV is changing in the X or Y direction; (f) Maintaining forward movement.
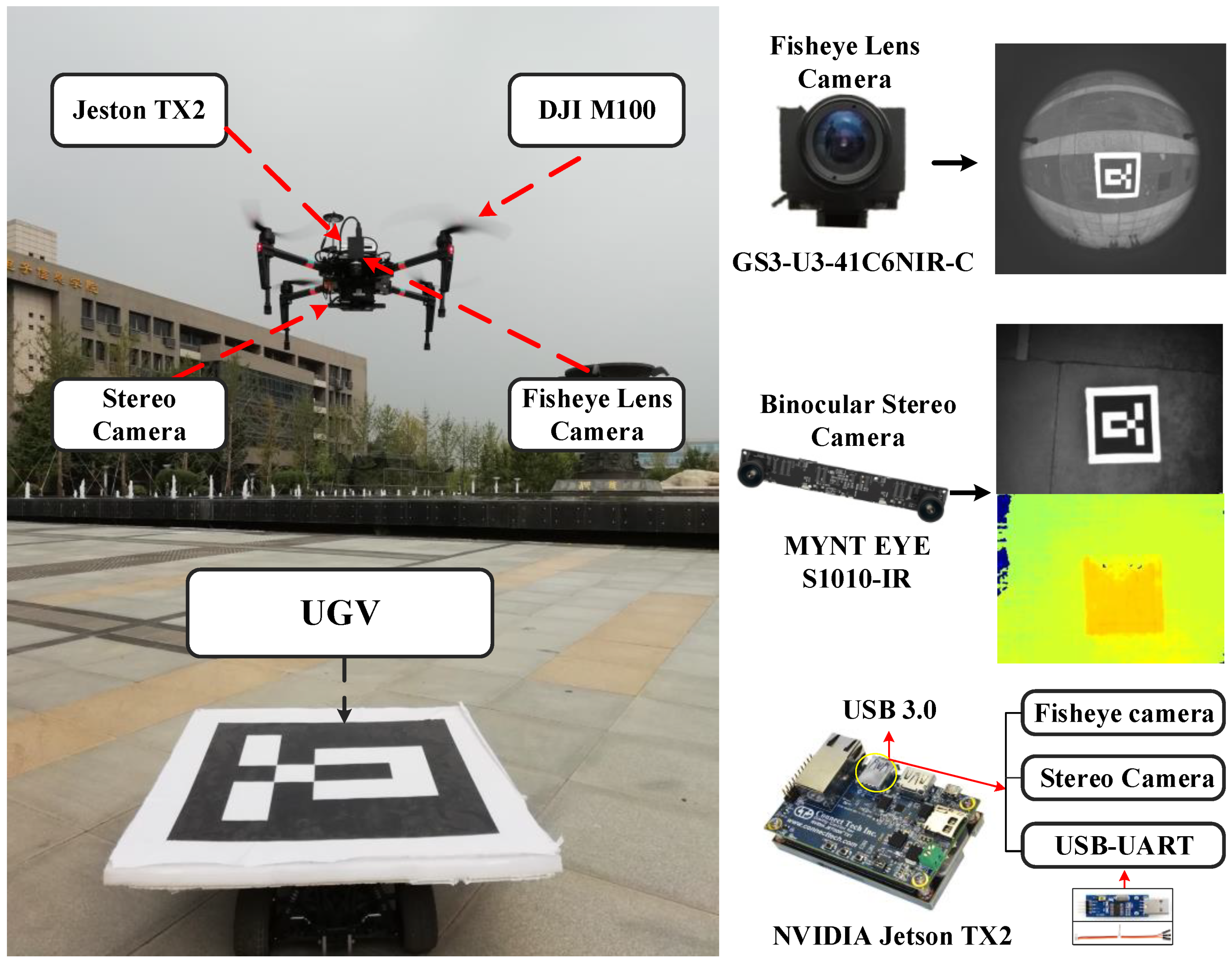
Figure 10.
The autonomous landing system settings used in our experiments, including DJI-MATRICE, Jetson TX2, the fisheye lens camera and binocular stereo camera, and the remote-control vehicle.
Figure 10.
The autonomous landing system settings used in our experiments, including DJI-MATRICE, Jetson TX2, the fisheye lens camera and binocular stereo camera, and the remote-control vehicle.
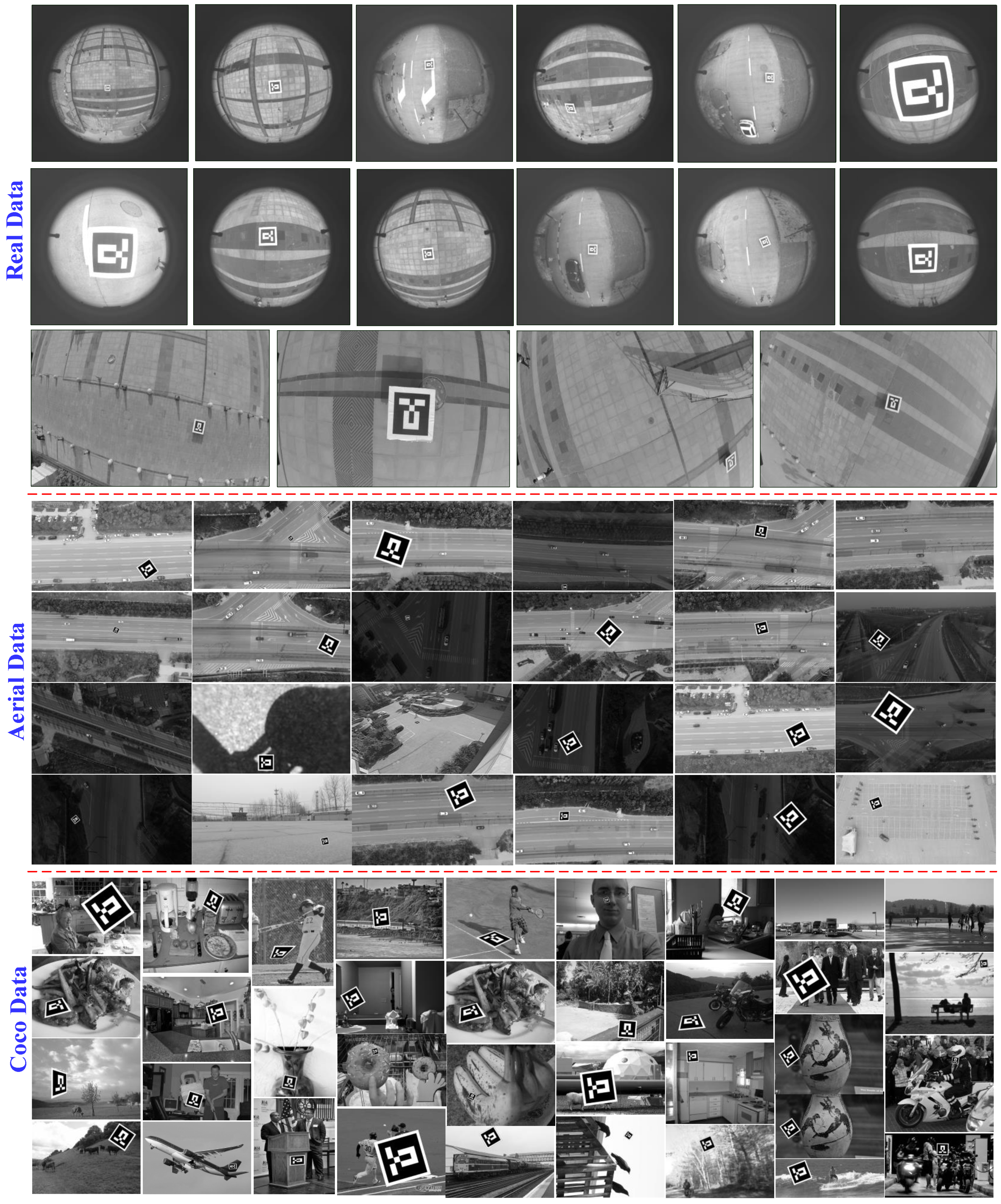
Figure 11.
Some images in our training dataset, including the real captured images and the composite images of complex scenes. Among them, the original images include near-infrared fisheye images captured by the Point Grey camera and grayscale images; the composite images include the Coco Test 2017 dataset and our own complex aerial dataset.
Figure 11.
Some images in our training dataset, including the real captured images and the composite images of complex scenes. Among them, the original images include near-infrared fisheye images captured by the Point Grey camera and grayscale images; the composite images include the Coco Test 2017 dataset and our own complex aerial dataset.
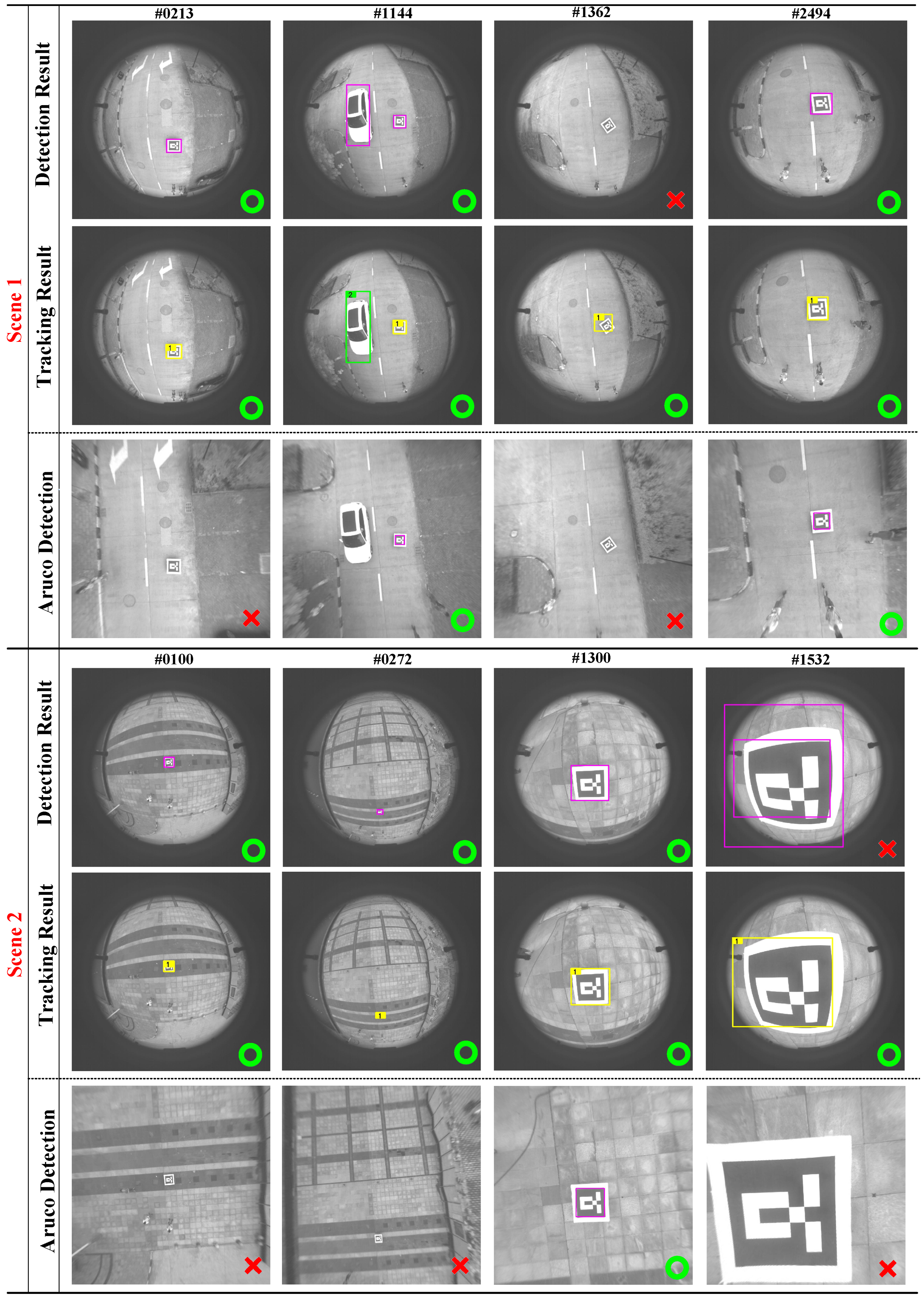
Figure 12.
The infrared image target detection and tracking results in two scenarios compared with an ArUco marker: detection results. The green circle represents correct detection and the red x indicates wrong detection.
Figure 12.
The infrared image target detection and tracking results in two scenarios compared with an ArUco marker: detection results. The green circle represents correct detection and the red x indicates wrong detection.
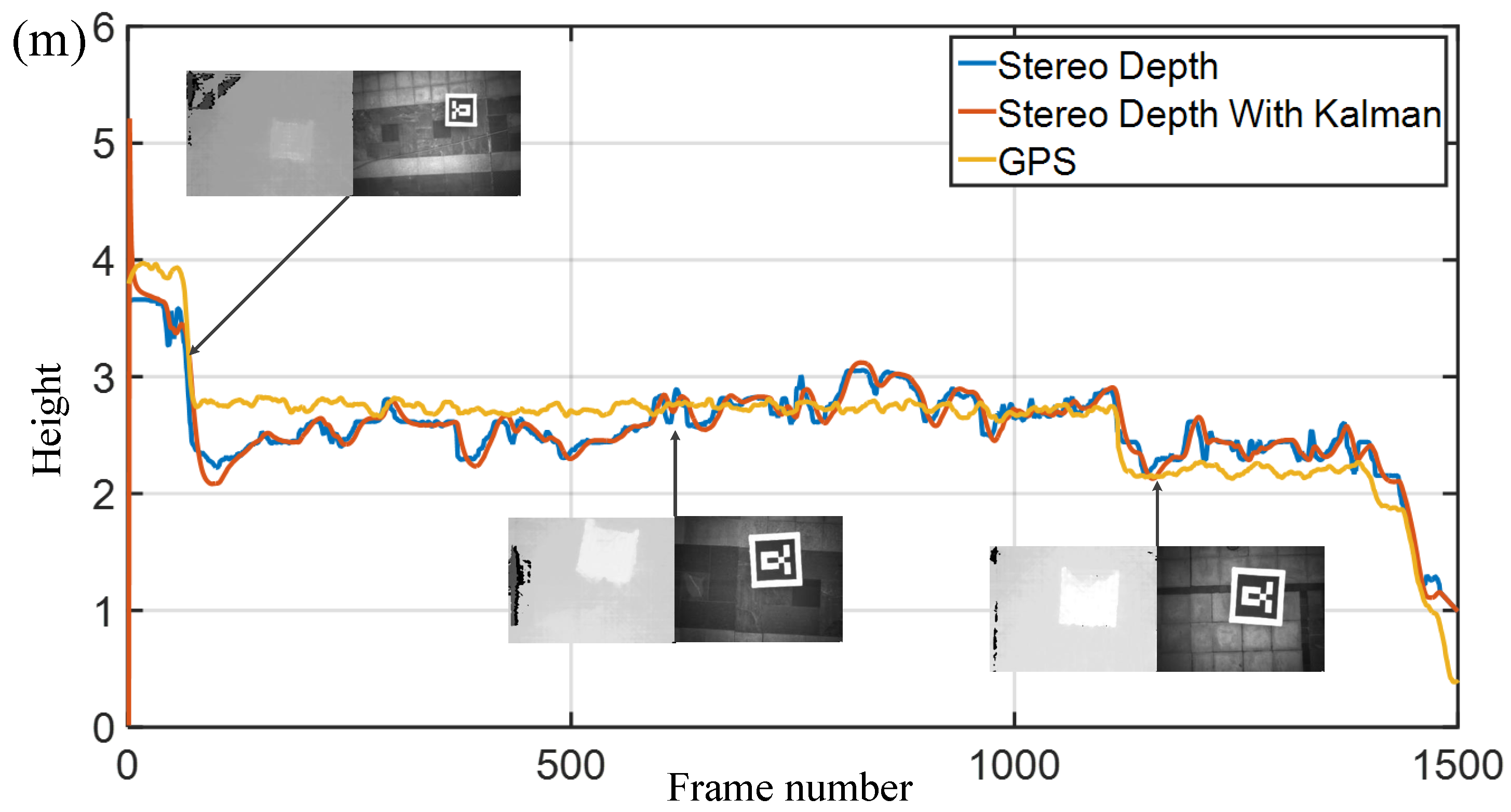
Figure 13.
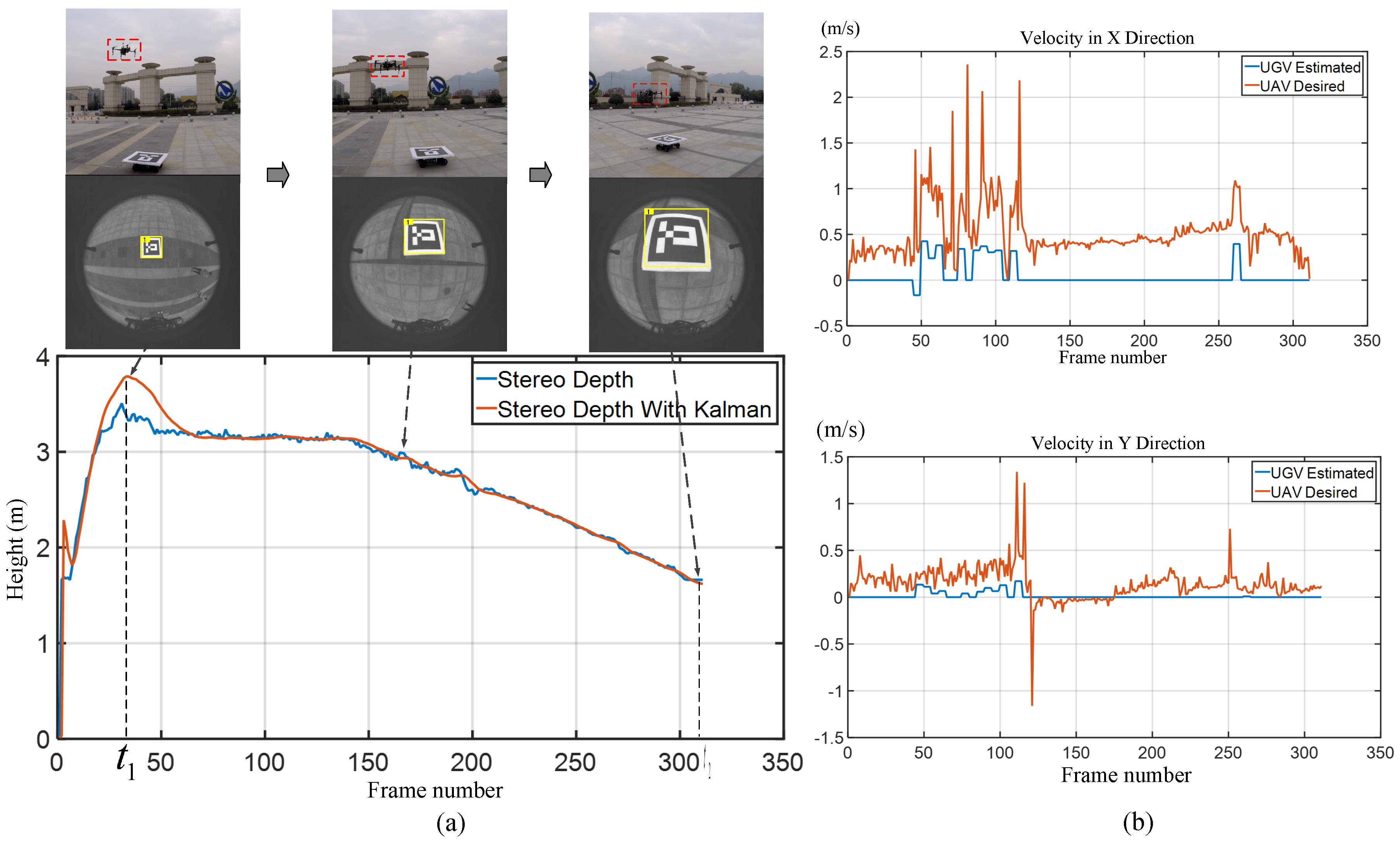
Comparison of UAV altitude estimation. Blue, red, and yellow represent the stereo depth estimation results, the stereo depth estimation results with Kalman filtering, and the ground truth of the GPS, respectively.
Figure 13.
Comparison of UAV altitude estimation. Blue, red, and yellow represent the stereo depth estimation results, the stereo depth estimation results with Kalman filtering, and the ground truth of the GPS, respectively.
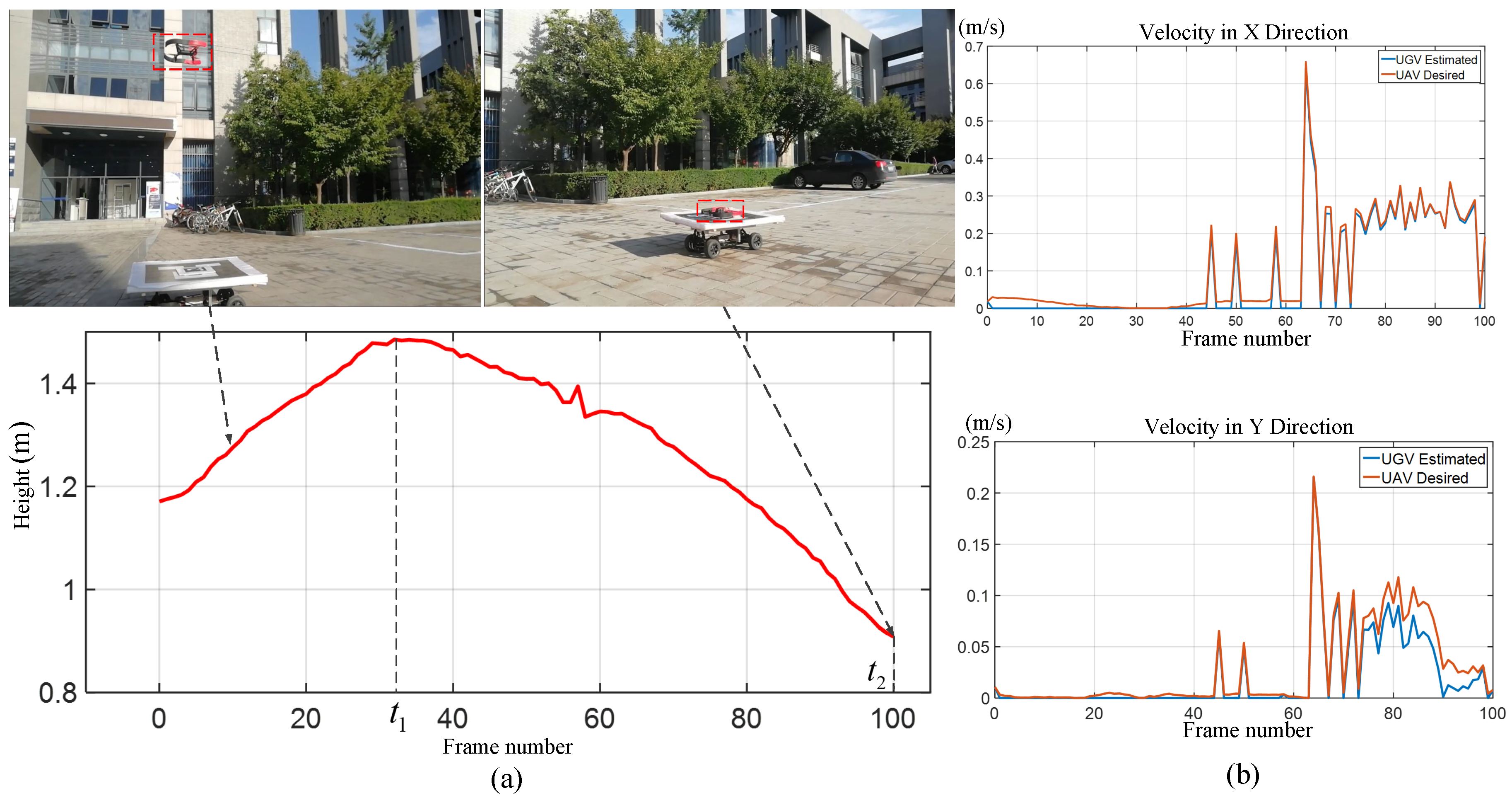
Figure 14.
The results of autonomous landing system built with Parrot Bebop, including (a) the flight altitude changes of UAV; (b) the velocity changes in the X and Y directions of the UGV and UAV.
Figure 14.
The results of autonomous landing system built with Parrot Bebop, including (a) the flight altitude changes of UAV; (b) the velocity changes in the X and Y directions of the UGV and UAV.
Figure 15.
The results of the autonomous landing system built with DJI M100, including (a) the flight altitude changes of the UAV; (b) the velocity changes in the X and Y directions of the UGV and UAV.
Figure 15.
The results of the autonomous landing system built with DJI M100, including (a) the flight altitude changes of the UAV; (b) the velocity changes in the X and Y directions of the UGV and UAV.
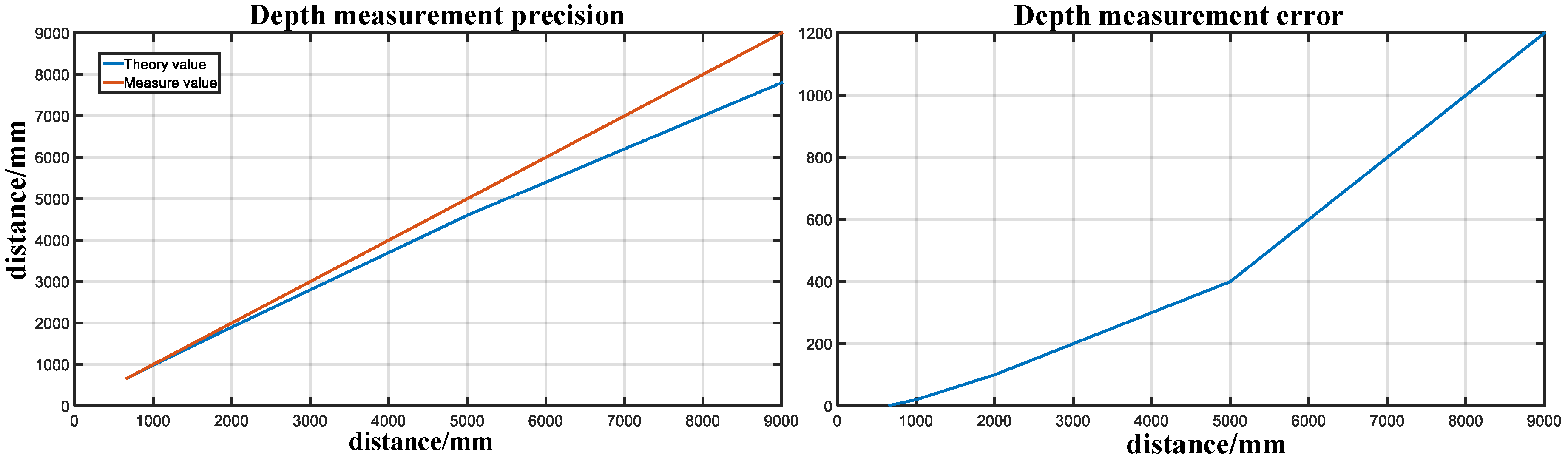
Figure 16.
The precision curve and error curve of the depth measurement of the binocular camera MYNT EYE S1010-IR.
Figure 16.
The precision curve and error curve of the depth measurement of the binocular camera MYNT EYE S1010-IR.
Table 1.
The camera and lens parameters.
Table 2.
The PID control parameters.
Table 2.
The PID control parameters.
| Experiments | Height (m) | | | |
|---|
| Simulation | ≥4 | 0.80 | 0.00 | 0.35 |
| <4 | 1.50 | 0.00 | 0.50 |
| Real-World (DJI) | ≥3 | 0.50 | 0.00 | 0.20 |
| <3 | 0.70 | 0.00 | 0.25 |
Table 3.
The detection performance on the test dataset.
Table 3.
The detection performance on the test dataset.
| Datasets | Total Targets | TP | FP | FN | Precision | Recall | F1-Measure |
|---|
| Scene 1 | 408 | 391 | 0 | 17 | 100.00% | 95.83% | 97.87% |
| Scene 2 | 960 | 957 | 0 | 3 | 100.00% | 99.68% | 99.83% |
| Scene 3 | 934 | 932 | 0 | 2 | 100.00% | 99.78% | 99.88% |
| Scene 4 | 421 | 419 | 0 | 2 | 100% | 99.52% | 99.75% |
| Scene 5 | 3175 | 3175 | 2 | 0 | 99.93% | 100.00% | 99.96% |
| Total | 5898 | 5874 | 2 | 24 | 99.62% | 99.59% | 99.60% |
Table 4.
The NVIDIA Jetson TX2.
Table 4.
The NVIDIA Jetson TX2.
| Content | Jetson TX2 |
|---|
| GPU | NVIDIA Pascal, 256 CUDA cores |
| CPU | dual-core NVIDIA Denver2 + quad-core ARM Cortex-A57 |
| Memory | 8 GB 128-bit LPDDR4 59.7 GB/s |
| PCIE | Gen 2 | 1 × 4 + 1 × 1 OR 2 × 1 + 1 × 2 |
| USB | USB 3.0 + USB 2.0 |
| Mechanical | 50 mm × 87 mm (400-Pin Compatible Board-to-Board Connector) |
Table 5.
The CPU usage in NVIDIA Jetson TX2.
Table 5.
The CPU usage in NVIDIA Jetson TX2.
| Core 1 | Core 2 | Core 3 | Core 4 | Core 5 | Core 6 |
|---|
| 43–66% | 65–99% | 57–98% | 43–62% | 40–62% | 41–69% |
Table 6.
The YOLOv3-416 compared to YOLOv3-tiny in NVIDIA Jetson TX2.
Table 6.
The YOLOv3-416 compared to YOLOv3-tiny in NVIDIA Jetson TX2.
| Model | Train | Test | Speed (FPS) | Precision | Recall | F1-Measure |
|---|
| YOLOv3-416 | UGV_Train_Data | Scene 5 | 3.00 | 98.91% | 100.00% | 99.45% |
| YOLOv3-tiny | UGV_Train_Data | Scene 5 | 20.00 | 99.93% | 100.00% | 99.96% |
Table 7.
The Computation time for Jetson TX2.
Table 7.
The Computation time for Jetson TX2.
| Content | Mean | Standard Deviation | |
|---|
| Fisheye Correction | 6.15 | 1.97 | (ms) |
| Stereo Depth Estimation | 23.77 | 2.66 | (ms) |
| Detection | 51.24 | 55.69 | (ms) |
| Tracking | 1.51 | 0.86 | (ms) |
| Motion compensation | 105.71 | 0.03 | (ms) |
| Nonlinear Control | 0.34 | 0.07 | (ms) |
| Total (Max thread) | 110.08 | 0.03 | (ms) |

 ,
, 
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}


