3.3. Range Image Technique for Quantifying Change Regions
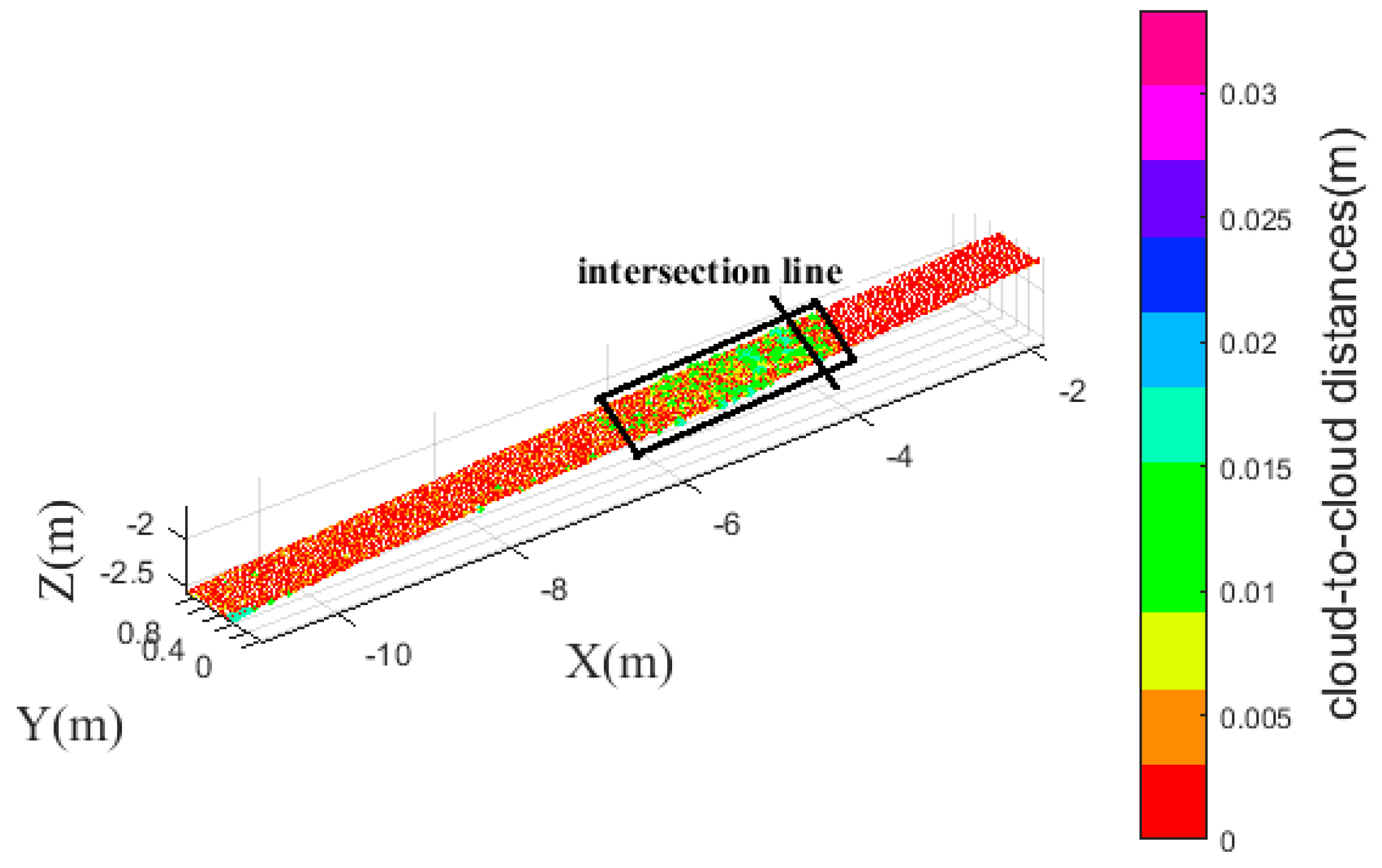
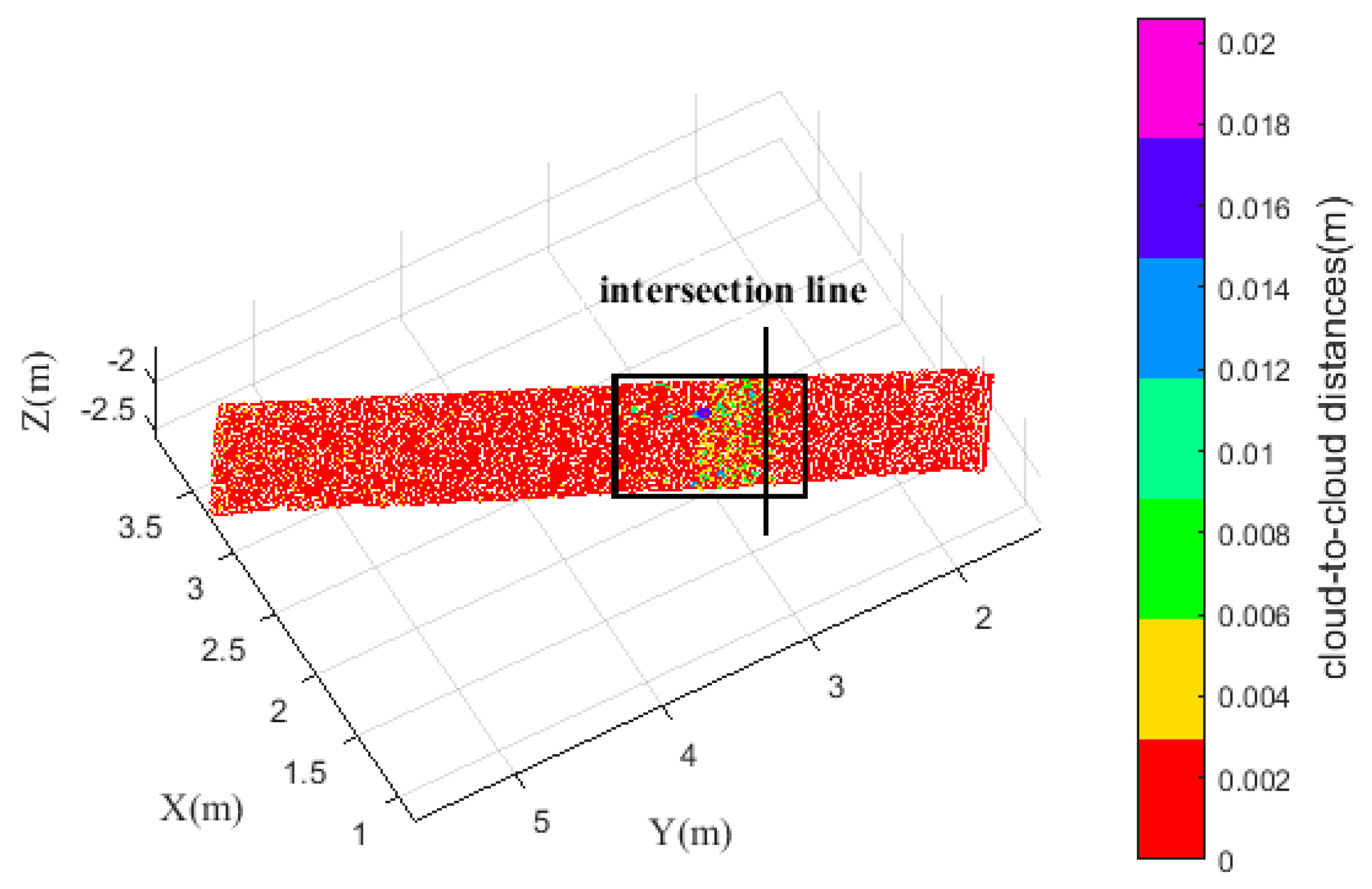
From change analysis results using the cloud-to-cloud distance, it is apparent that the change in the area near the intersection line is larger than in other areas. Therefore, points were selected manually from the global point cloud around this area. The range images were created according to Equation (1) for the two slopes respectively.
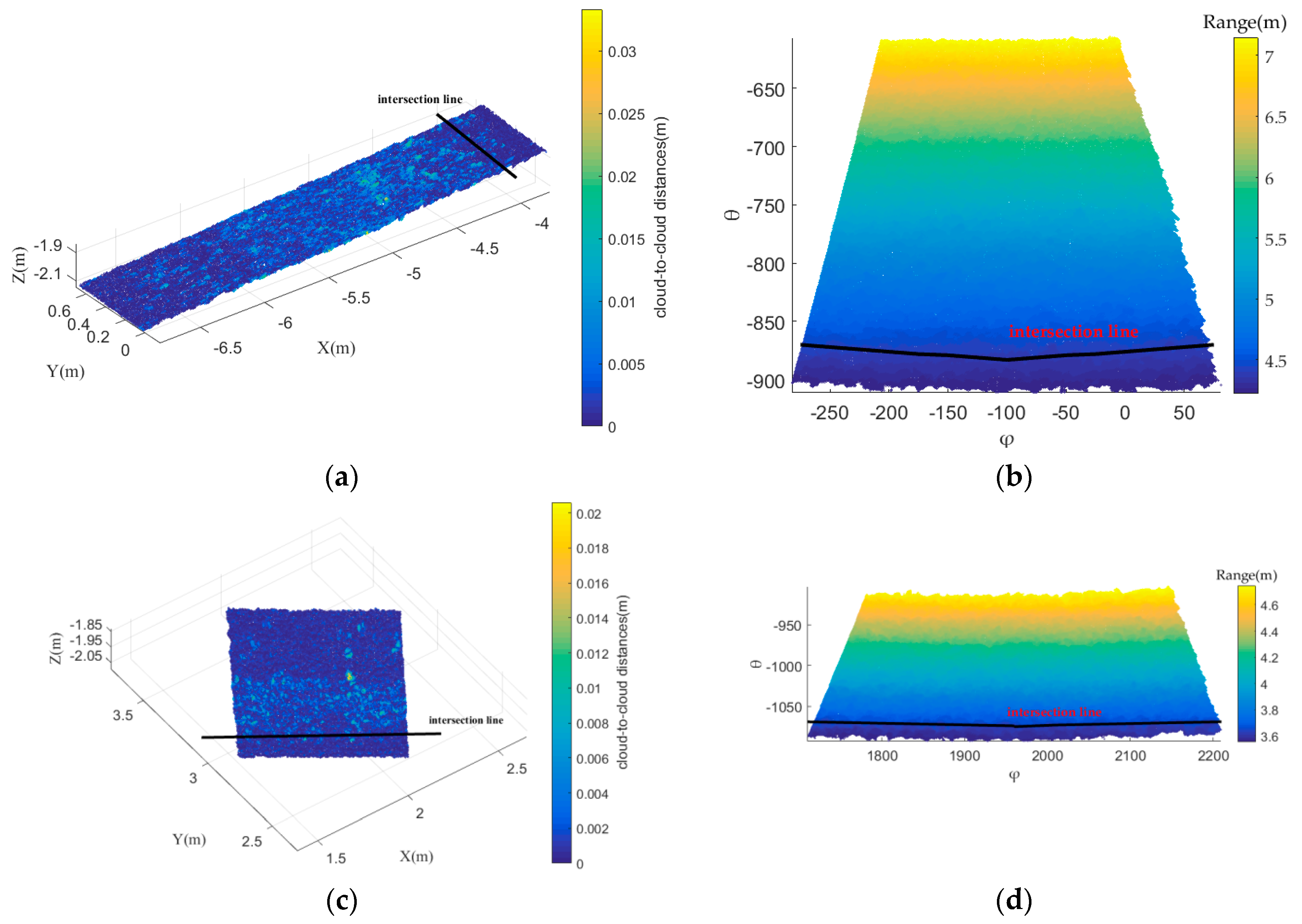
Figure 8a,c show the raw point cloud colored by cloud-to-cloud distances for Slope 1 and Slope 2, respectively.
Figure 8b,d show the range images colored by ranges for Slope 1 and Slope 2, respectively.
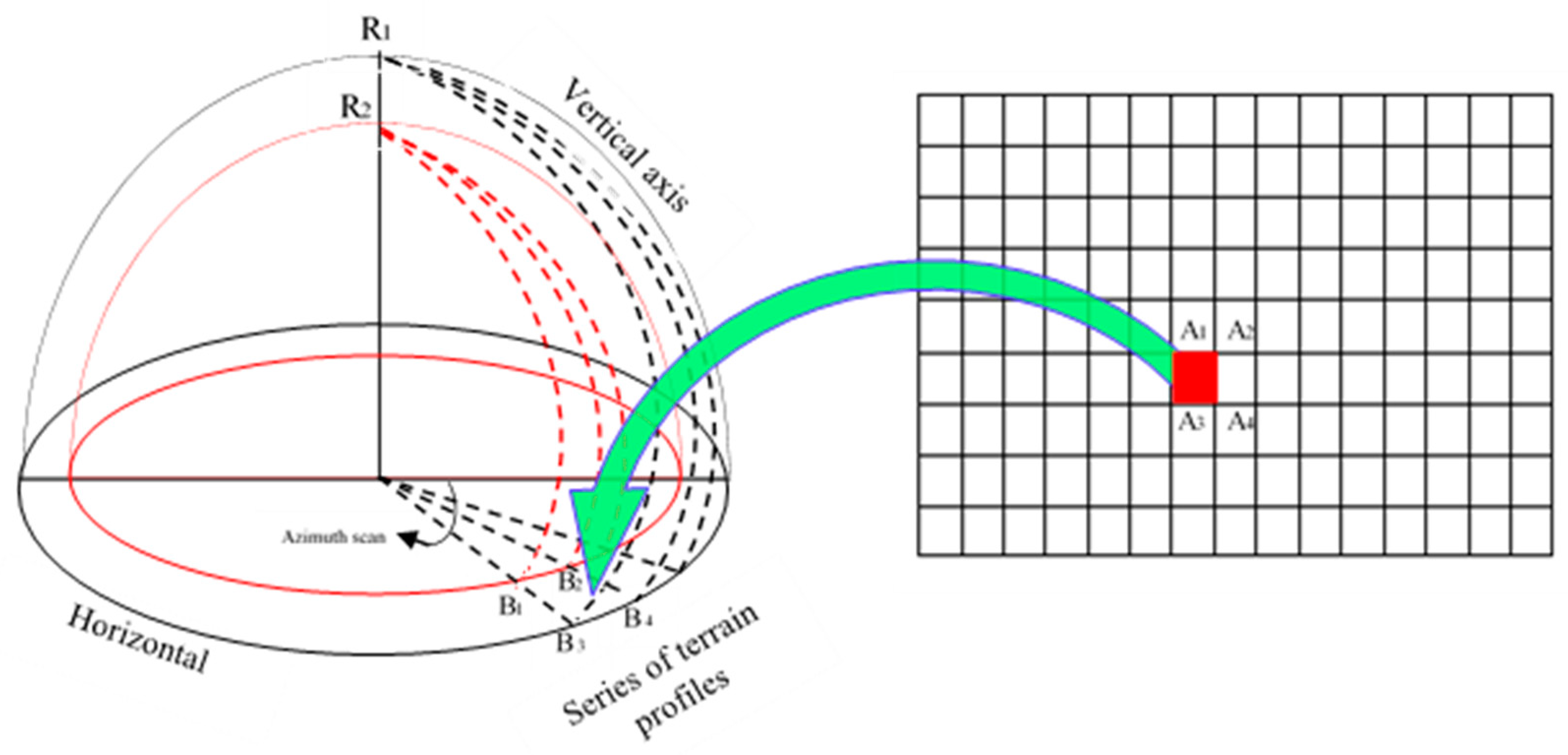
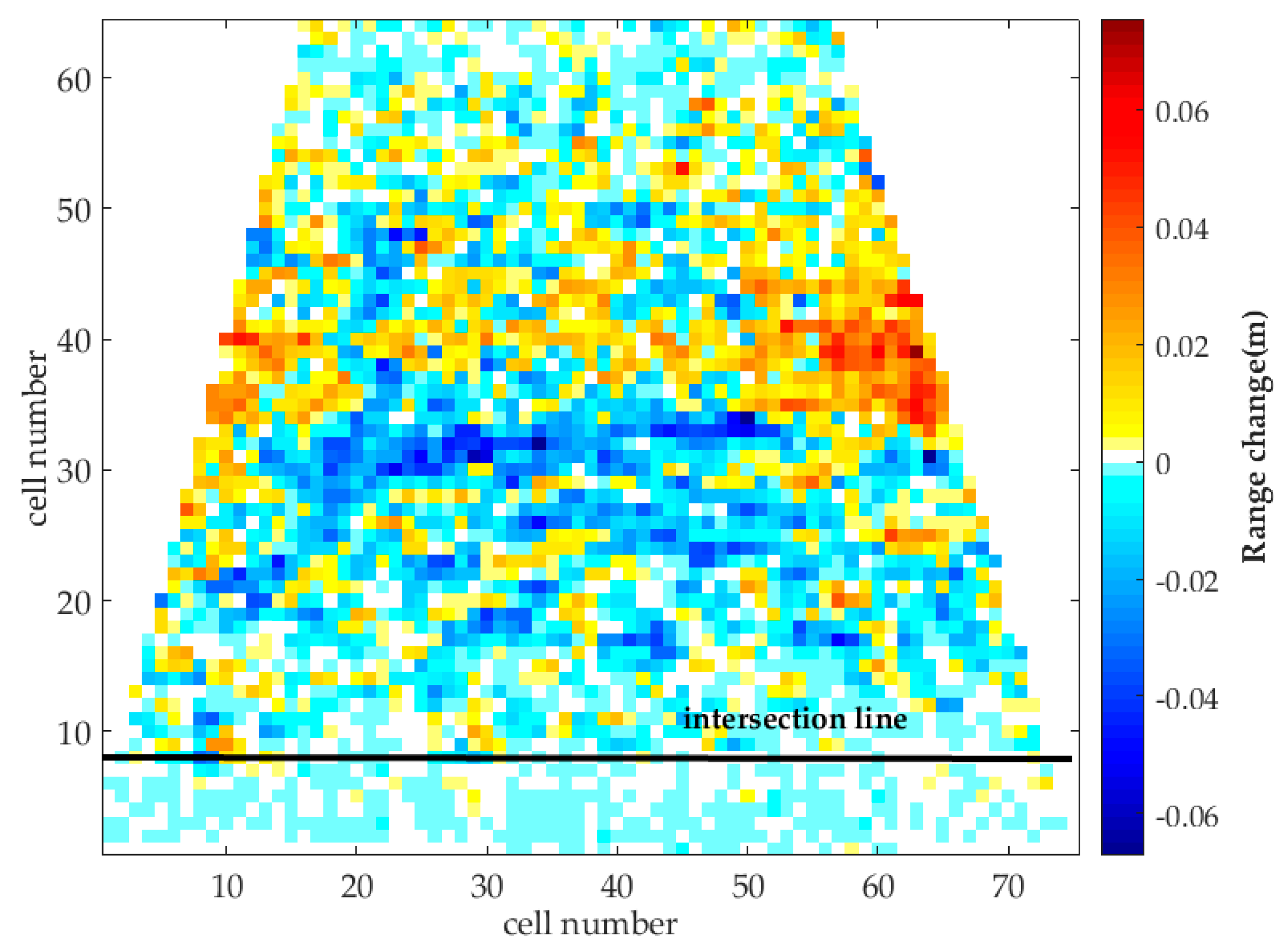
In the range image, the horizontal and vertical axes correspond to the horizontal and vertical scan angles, respectively. In our experiment, the horizontal and vertical angle resolutions are both 0.0005 rad. Here, the size of the image cell was set at 5 times this angular resolution, i.e., at a value of 0.0025 rad, to insure the number of points in each cell is more than 20. Next, the range image was divided into cells of 0.0025 rad × 0.0025 rad. To remove the influence of edge effects, cell creation started from the center of the range image. For each point in a given cell, the mean range was estimated by averaging the ranges of all point within the current cell. Through comparing the corresponding cells in two epochs, the range change was estimated. The range images colored by range change for Slope 1 and Slope 2 are shown in
Figure 9 and
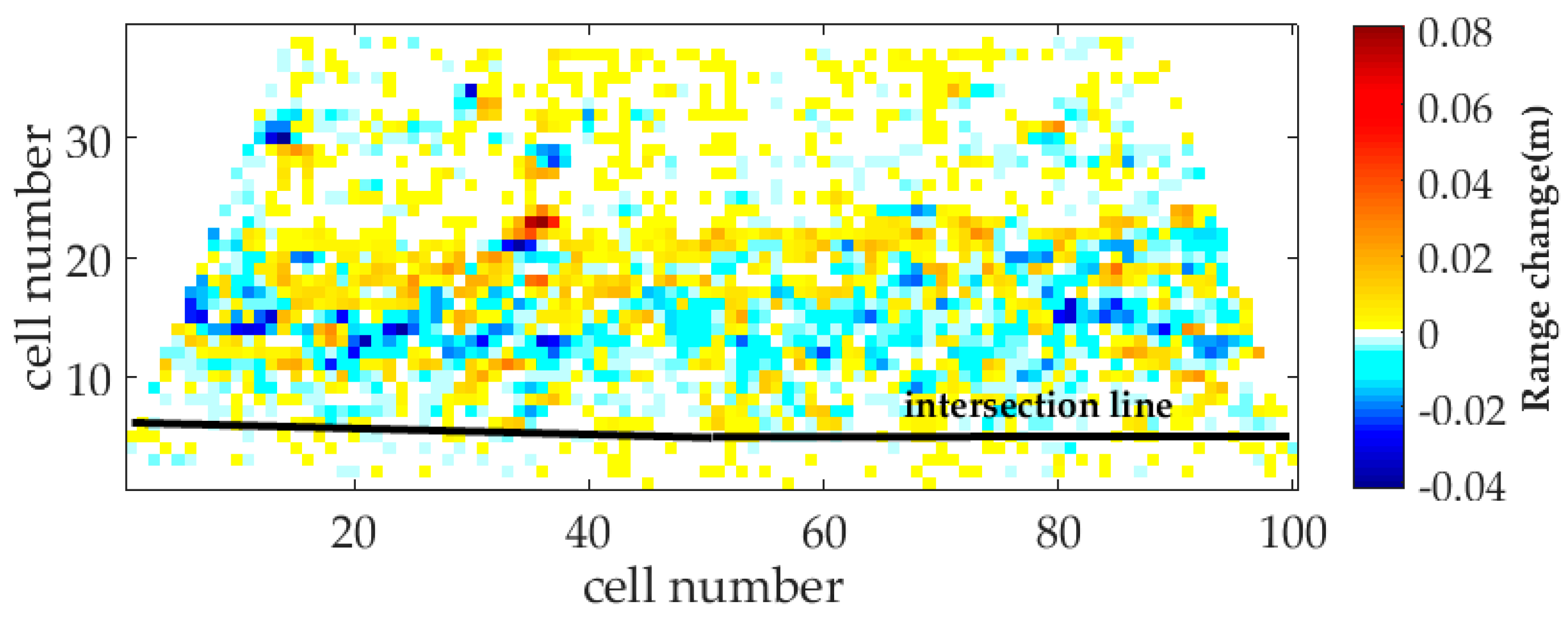
Figure 10, respectively. Range changes with negative values indicate rocks in the current cell that have moved closer to the scanner location after the wave attack test. Conversely, the range change with positive values correspond to the rocks in the current cell that moved away from the scanner center after the wave attack test.
For further characterizing the change information, the range change is projected to the directions along and perpendicular to the slope. Based on the horizontal angles, the center of the slope is obtained according to the method introduced in
Section 3.3. Afterwards, the vectors representing the main direction (
) along the slope, the second direction (
) across the water flume, and the third direction (
) vertically upwards against the slope plane are estimated. These vectors are summarized in
Table 4.
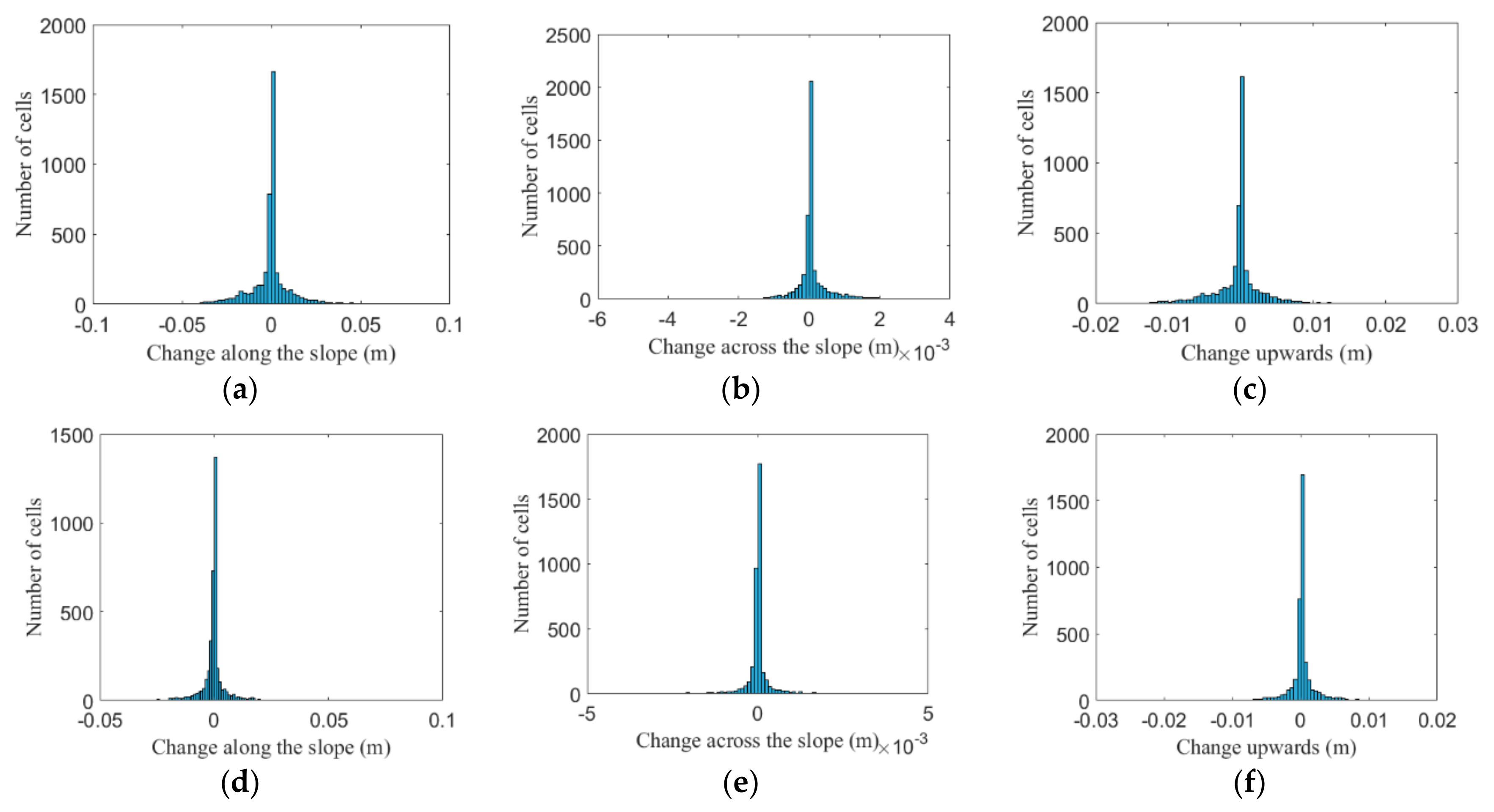
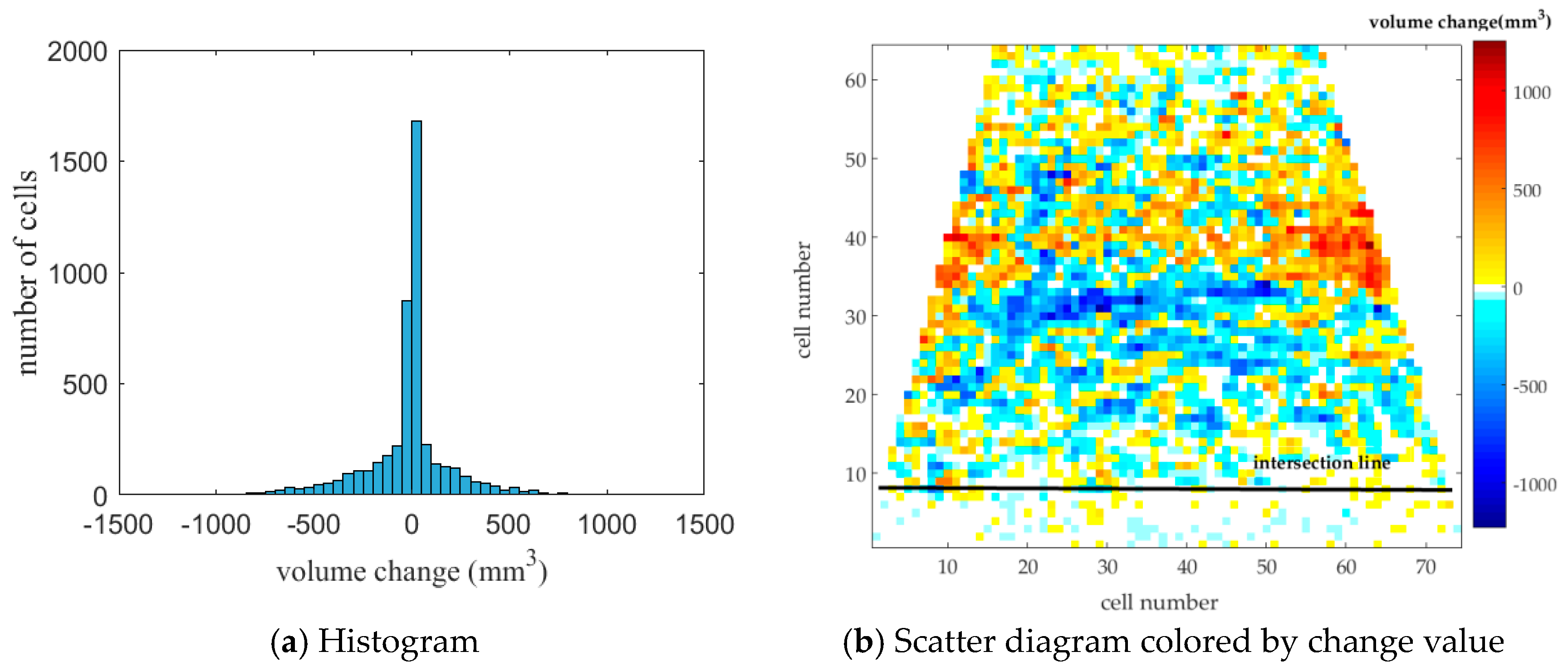
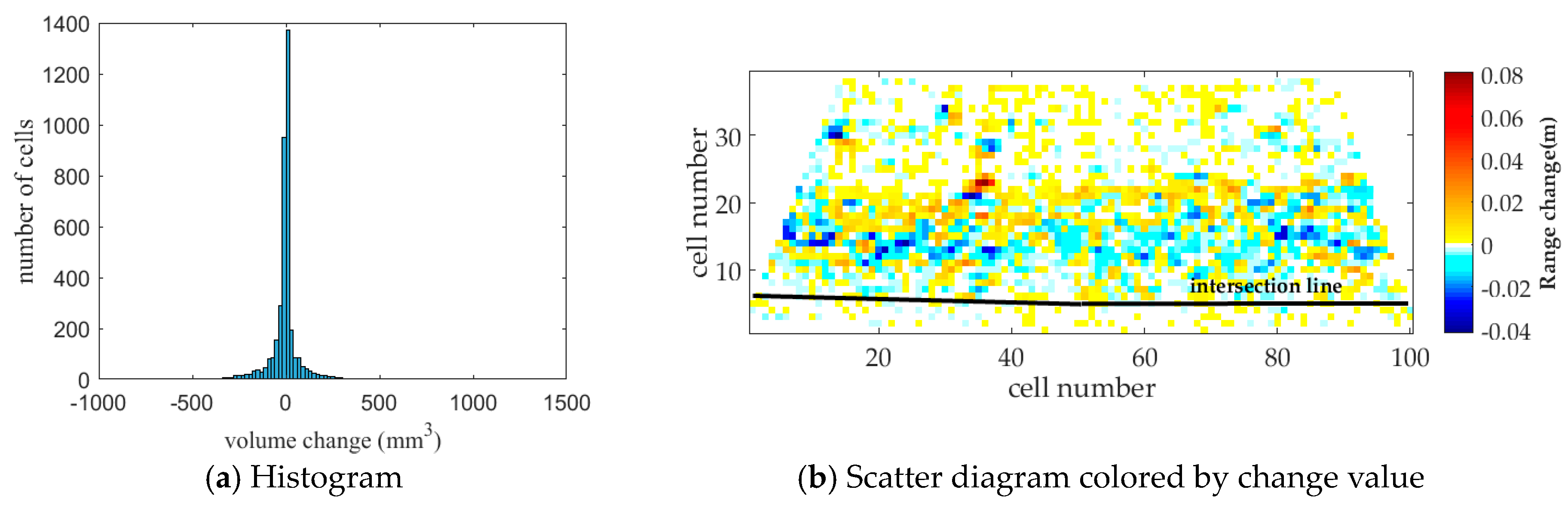
Subsequently, the range change for every cell in the range image is decomposed in the three directions as discussed above. The histograms of the number of cells along slope, across slope, and upwards for Slope 1 are shown in
Figure 11a–c, respectively. Similarly, the histograms of the number of cells along slope, across slope, and upwards for Slope 2 are shown in
Figure 11d–f, respectively.
As can be seen in
Figure 11, the changes for both Slope 1 and Slope 2 in the direction along slope are [−0.0645, 0.0726] m and [−0.0399, 0.0774] m, respectively, with the left value indicating the minimum change while the right value indicates the maximum change values in a slope). The changes for two slopes (Slope 1 and Slope 2) in the direction across the water flume are between [−0.0043, 0.0037] m and [−0.0045, 0.0048] m, respectively. The changes for two slopes (Slope 1 and Slope 2) in the direction vertically upwards against the slope plane are between [−0.0190, 0.0201] m and [−0.0237, 0.0123] m, respectively. Note that the change values in the direction across the water flume have a big difference from the values in the other directions. The absolute change value is relatively small: the minimum value is −0.0043 m and −0.0045 m for Slope 1 and Slope 2, respectively, while the maximum value is 0.0037 m and 0.0048 m. In addition, the cells with an absolute change value less than 0.001 m in the direction across the water flume occupy 92.5% and 95.7% of Slope 1 and Slope 2, respectively. In this regard, considering the registration error, the surface density in different scans, etc., the change in the direction across the water flume can be ignored in the further analysis. Next, the scatter diagrams for the two slopes in the direction along slope are plotted, in
Figure 12 and
Figure 13.
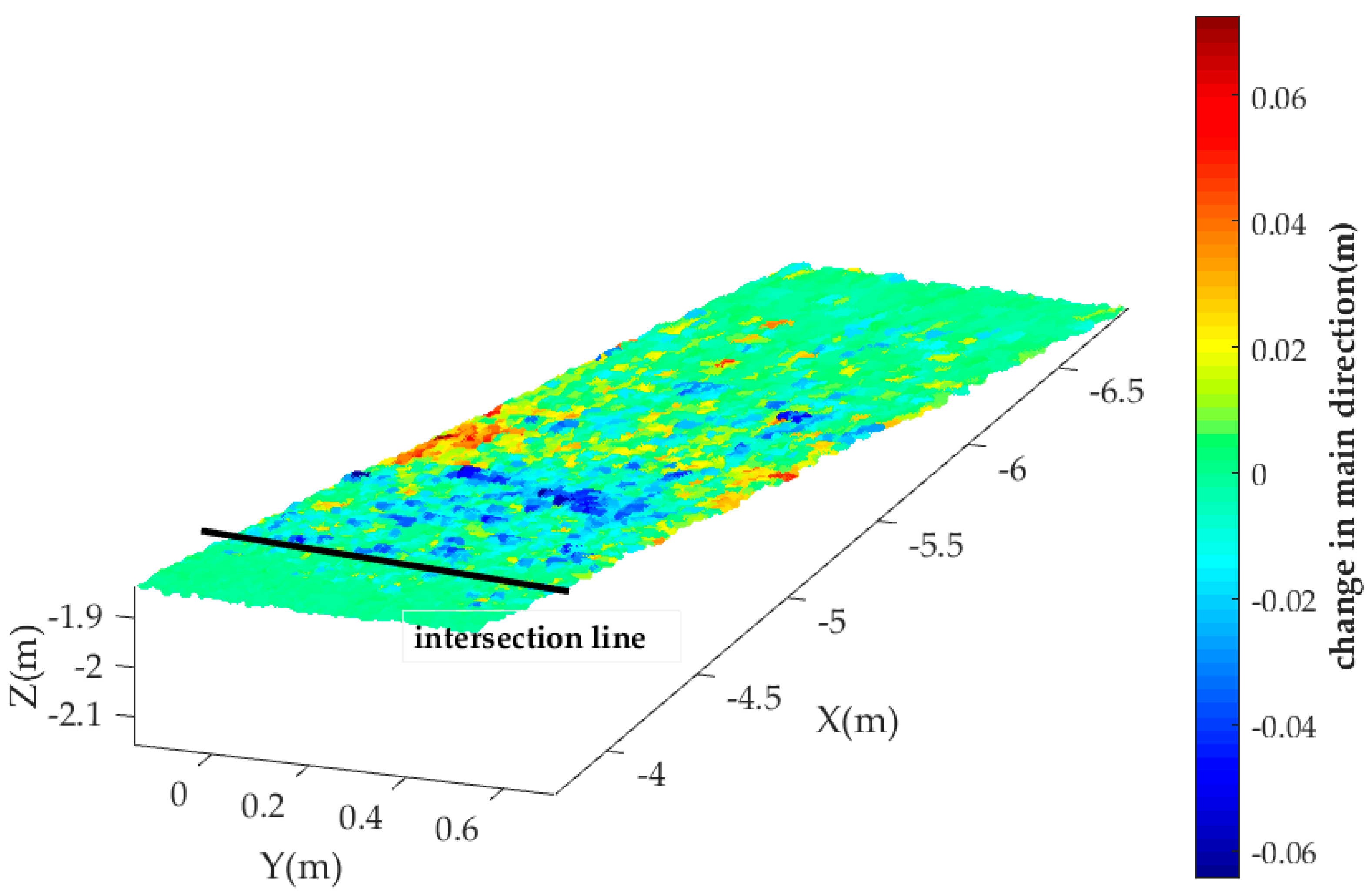
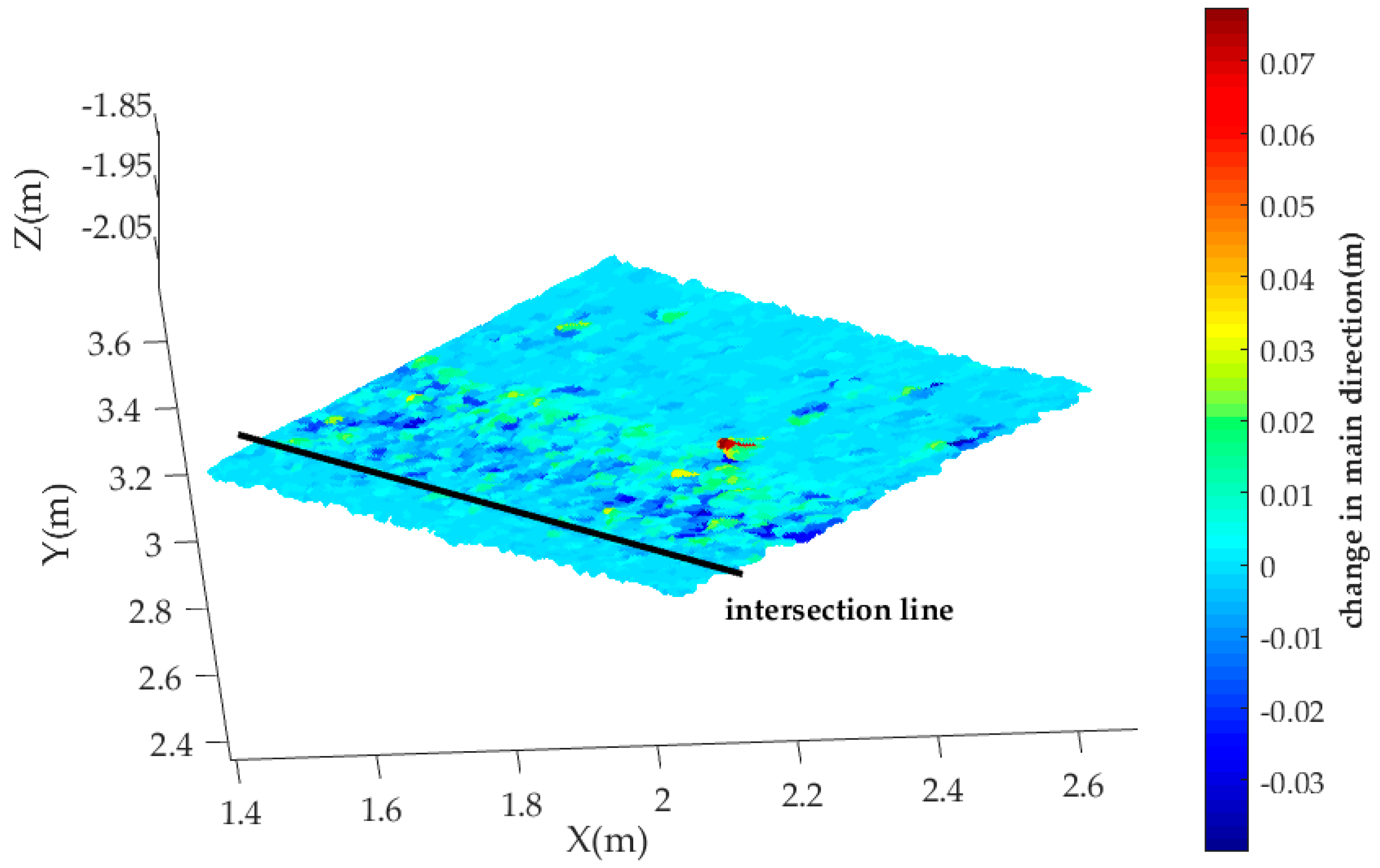
As shown in
Figure 12 and
Figure 13, the changes in the direction along slope are symmetrically distributed along the center line of the slope length, i.e., the center line of the water flume. Thus, the change profile along the slope length, i.e., the vertical axis direction (
) in 2D space, is defined and computed by averaging all the cell values within the same horizontal axis (
), as in Equation (6):
where
is the number of columns, in the raster image, and
denotes the change of a raster grid in the
i-th row and
j-th column.
Figure 14 shows the change profile for the damage area of the two slopes (1:10 and 1:5) in the along slope direction. The maximum and minimum change in the value of direction along the slope for Slope 2 are 0.0052 m and −0.0032 m, respectively, while the same change values for Slope 1 are more significant with values of 0.0121 m and −0.0132 m, respectively. Compared to the change in the direction along the slope, the changes in the direction vertically upwards against the slope plane are less significant, i.e., the maximum change values for Slope 1 and Slope 2 are 0.0036 m and 0.001 m, respectively, and the minimum change values are −0.0036 m and −0.0018 m, respectively. The change information is also summarized in
Table 5.
Close examination of the change information in
Figure 14 and
Table 5 shows that most change happened at the area around the intersection line. In addition, the changes in the direction along the slope have a similar tendency for Slope 1 and Slope 2, i.e., along the slope, first the change becomes larger, which indicates that some materials (stones) moving to this location from other areas. Then the change becomes smaller which indicates the materials here are moving away after the wave attack test. The slopes tend to be stable away from this location. However, the changes vertically upwards against the slope plane act differently for two slopes. That is, for Slope 1, the change is first larger, then smaller. For Slope 2, the change first is smaller, then larger. This is an interesting phenomenon and the following conclusions can be drawn, (1) For the steeper 1:5 slope, the transport direction changes to be mostly seaward, that is, towards the direction away from the scanner and (2) for the less steep 1:10 slope, the transport is in the opposite direction, that is, towards the direction close to the scanner.
In our previous work [
55], we analyzed the same datasets for the slopes but performed another approach consisting of exploiting a slope coordinate system, coordinate transformation, range image creation, change detection, etc. Through comparing the results, we found that the results acquired by the approach proposed in this article correspond well to the results presented in our previous contribution [
55] including the change values, change tendency, etc.
3.5. Limitation Analysis
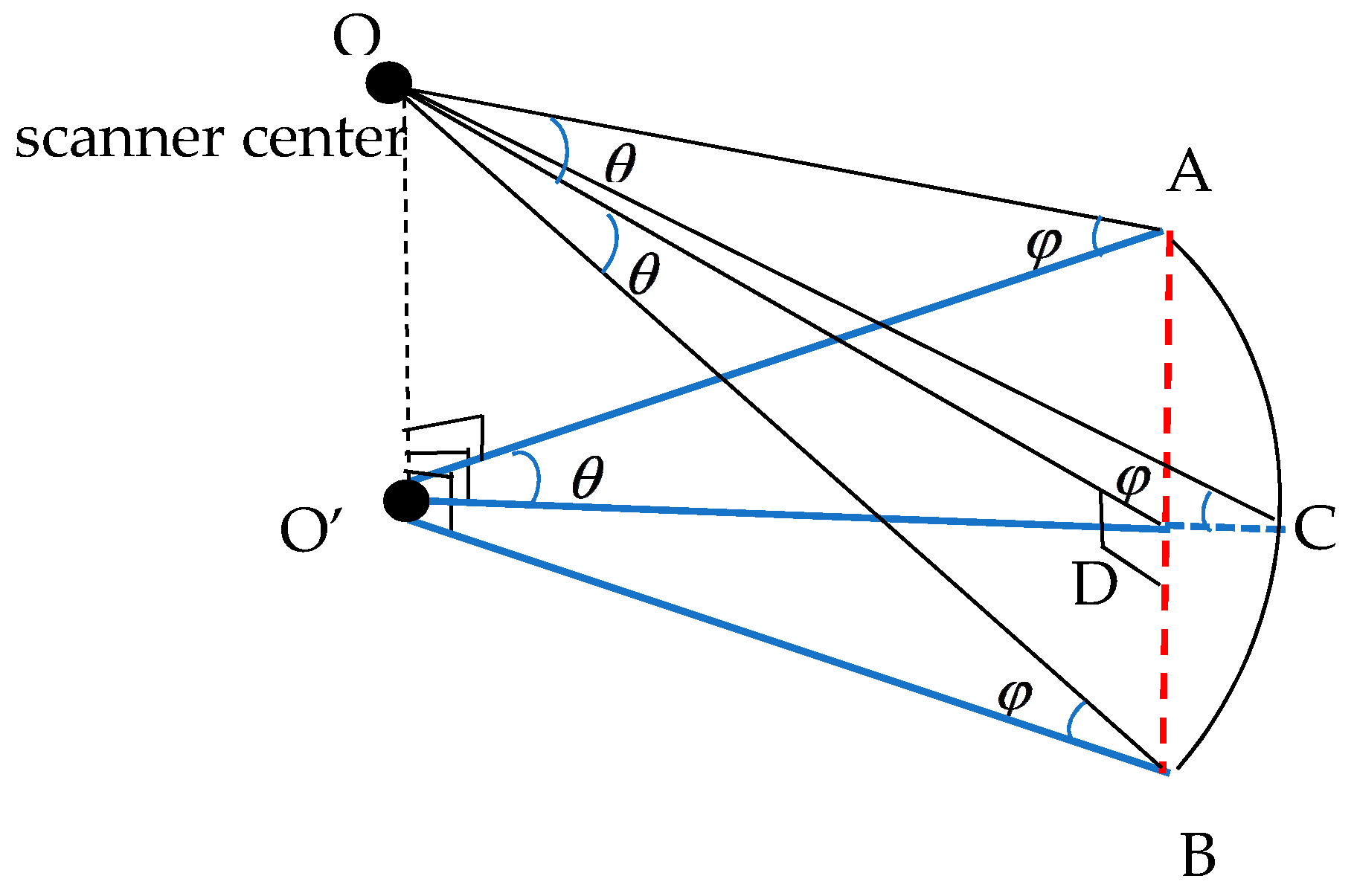
In this study, the rock slopes considered are long and narrow which ensures the excellent performance of the range image technique. However, the width of the slope influences the change profile along the slope length generation. The typical graphical illustration of the scanning is described in
Figure 17 where
denotes the scanner center and
denotes the scanner center projection in the slope plane. The slope length direction is represented by
, the points in the arc
are with identical vertical angle so they are expected to have the same vertical coordinates in 2D space that are revealed by a line. In reality, the points in the line
across the slope are expected to be extracted rather than the point in the arc
. This somehow causes errors in generating the change profile along the slope length. Assuming that the distance from
to
in the slope plane is
with a value of
, the distance from the scanner center to the slope plane is
with a value of
, the vertical angle at current position is
, the angle between
and
is
, and the width of the slope (
) is
, thus,
Finally, the distance between and is estimated by .
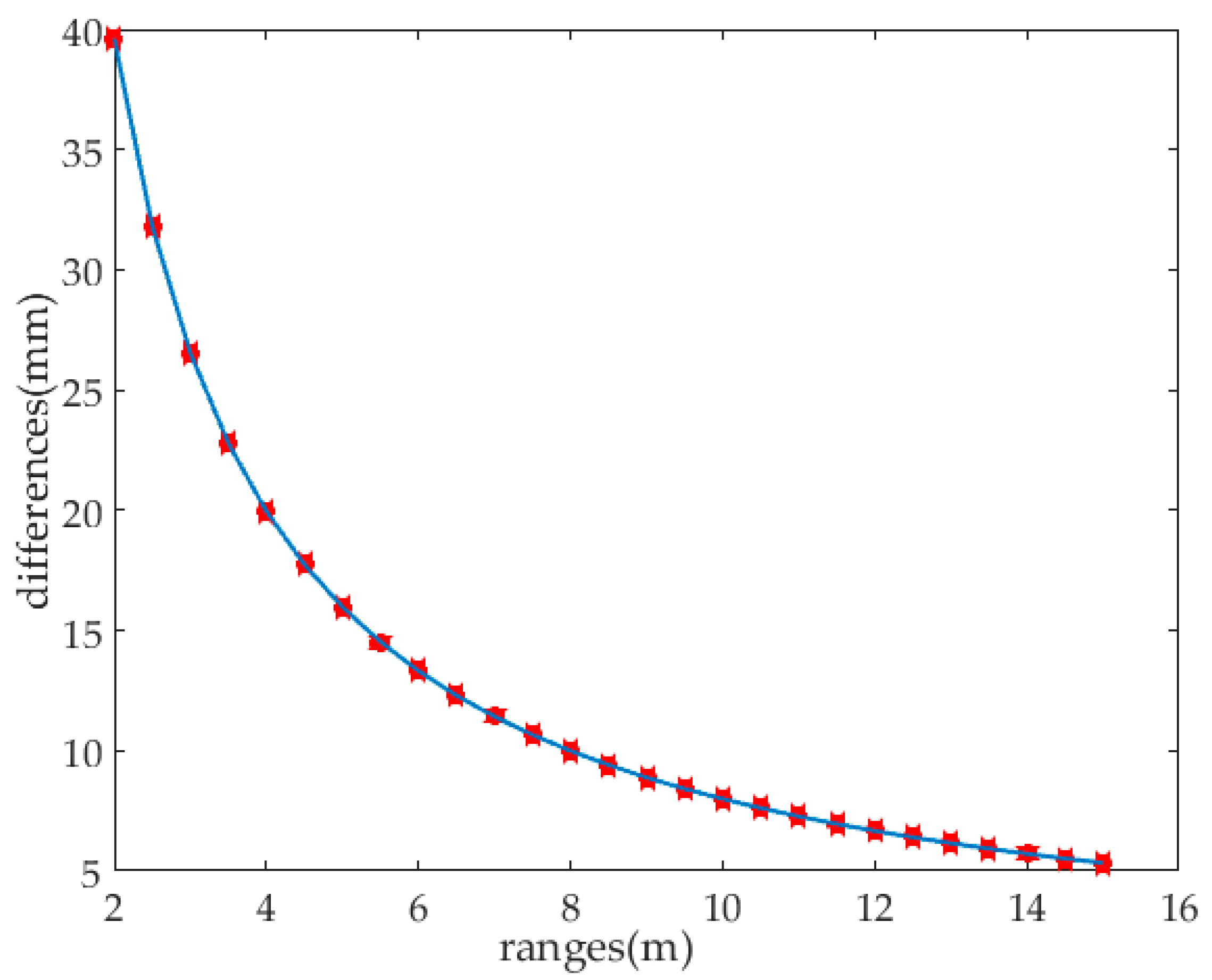
In our experiment, the width of the slope is 0.8 m, the range for Slope 1 is less than 9 m while for Slope 2 it is less than 15 m. The distance from the scanner center to the slope plane is less than 2 m. Here we define the distance
equals to 2 m, and the range of 2 m to 15 m is used to illustrate the influence induced by the range image technique. A graph indicating the difference (
) against the ranges is shown in
Figure 18. It is apparently that the difference decreases as the range increase. The difference at the range of 2 m is 0.0396 m while the difference at the range of 15 m is 0.0053 m. Considering the absolute value is with a relatively small magnitude, the difference that shifting in the direction along the slope length induced by the method is acceptable. In this sense, the method presented here can be applied to any object with similar characteristics with the rock slopes of narrow and long dimensions, e.g., metro tunnels, railways, highways, and large-scale bridges. The above-analysis indicates the main limitation of range image technique applied in the change analysis of rock slopes. However, it definitely has no influence on the cell change analysis, volume change estimation, etc.
In order to investigate the influence induced by various point density on the volume change estimation results, the raw point clouds were downsampled with the percentage of 50%, 25%, and 10%, respectively. The surface density of slope 1 for the raw, 50%, 25%, and 10% of the point clouds is 378,089 pt/m
2, 189,044 pt/m
2, 94,522 pt/m
2, and 37,809 pt/m
2, respectively. While the corresponding surface density for slope 2 is 577,888 pt/m
2, 288,944 pt/m
2, 144,472 pt/m
2, and 57,789 pt/m
2, respectively. The proposed methodology was implemented on the downsampled point clouds again; the volume change information for the four cases are summarized in
Table 6. The maximum volume changes for erosion occurred, extracted from the raw, 50%, 25%, and 10% of point clouds for slope 1 are 1257.1 mm
3, 1261.9 mm
3, 1192.0 mm
3, and 1506.9 mm
3, respectively. While for slope 2 the maximum volume changes are 1004.8 mm
3, 1003.3 mm
3, 994.4 mm
3, and 991.7 mm
3, respectively. The minimum volume changes, i.e., dilation occurred, extracted from the raw, 50%, 25%, and 10% of point clouds for slope 1 are −1229.8 mm
3, −1194.2 mm
3, −1262.5 mm
3, and −1408.7 mm
3, respectively, in which the symbol “−” represents the dilation occurred. While for slope 2 the minimum volume changes are −528.5 mm
3, −540.7 mm
3, −546.4 mm
3, and −486.9 mm
3, respectively. Afterwards, the volume changes for the entire damaged area were estimated with values of −79,060.9 mm
3, −76,013.8 mm
3, −86,922.1 mm
3, and −81,596.1 mm
3, for the raw, 50%, 25%, and 10% of the point clouds, respectively. Next, the comparison of the extracted volume change results between the downsampled point clouds and the raw point cloud was carried out. It is evident that the maximum and minimum volume changes have a relatively large difference for the downsampled point cloud of 10% w.r.t the raw point cloud. In the case of the downsampled point cloud of 10%, the average point space is ~5.2 mm, namely on the surface of one stone (nominal diameter is 16.20 mm), the number of points is less than ten, so the points are not enough for reflecting the stone surface in an accurate way. Therefore, the low point density influences the extraction results of the volume change. In this regard, we conclude that relatively ideal volume change estimation results could be obtained under the surface point density greater than 144,472 pt/m
2.
To investigate the influence induced by various cell sizes on the volume change estimation results, the raster image is divided into cells of 0.01 rad × 0.01 rad, 0.005 rad × 0.005 rad, and 0.001 rad × 0.001 rad, respectively, for volume change estimation. The results are summarized in
Table 7 (results of cell of 0.0025 rad × 0.0025 rad included). Thanks to the various cell sizes, it is reasonable that the maximum, minimum, and mean volume changes are different against the various cell sizes. The volume changes of the entire interest area, i.e., the sum of the volume changes w.r.t four cell sizes are expected to be identical. However, as shown in
Figure 7, we found that for slope 1, the sum of the volume change becomes smaller with increased cell size, namely, the greater the cell size the smaller the sum of the volume change. While for slope 2, the sum of the volume change for the cell sizes of 0.01 rad × 0.01 rad, 0.005 rad × 0.005 rad, 0.0025 rad × 0.0025 rad, and 0.001 rad × 0.001 rad are −29,440.3 mm
3, −23,144.4 mm
3, −22,552.2 mm
3, and −21,047.1 mm
3, respectively, and their magnitudes are almost the same. As shown in
Section 3.2, the mean distance from the damaged area to the scanner center for slope 1 is ~6.2 m; while the value for slope 2 is ~4.17 m. Therefore, for the raster image of slope 1 with the cell sizes of 0.001 rad × 0.001 rad, 0.0025 rad × 0.0025 rad, 0.005 rad × 0.005 rad, and 0.01 rad × 0.01 rad, the corresponding cell sizes in Euler space are ~0.006 m, ~0.015 m, ~0.03 m, and ~0.06 m, respectively. For the raster image of Slope 2 with the cell sizes of 0.001 rad × 0.001 rad, 0.0025 rad × 0.0025 rad, 0.005 rad × 0.005, rad and 0.01 rad × 0.01 rad, the corresponding cell sizes in Euler space are ~0.004 m, ~0.01 m, ~0.02 m, and ~0.04 m. At this point, we found that if the cell size in Euler space is greater than the nominal of the stone diameter, i.e., 16.2 mm, one cell covers more than one complete stone which causes the accretion or the erosion of the current cell averaged by the region outside the stone. In this regard, the effectiveness and reliable of the proposed methodology is constrained by the cell size, that is, it is better to set the cell size smaller than the nominal size of the particles composing the slopes in the real applications.
As stated in a past paper [
64], terrestrial laser scanning measurements are subject to noise induced from the incident angle. They concluded that above a 60 degree incidence angle, noise in the measurements affect the scan point precision. In our experiment, the incidence angle is close to 60 degrees, even greater than 60 degrees in some areas. However, considering the distinctiveness of the rock slope with the characteristics of long and narrow, it is unavoidable to guarantee the incident angles w.r.t entire areas greater than 60 degrees. As a result, we only used the damaged area that is close to the scanner center, i.e., the incidence angle is relatively small w.r.t the entire slope, for change analysis. This setting somehow improved the reliability of the volume change extraction results. Moreover, the raster image was introduced in this article which averaged all points in each cell. This step also reduced the error induced by the incidence angle. In the real application, it is better to mount the scanner with a relatively higher position with respect to the object to ensure a smaller incident angle which definitely increases the feasible and accuracy of the proposed methodology.
Also, the roughness of the slope is another factor that influences the plausibility of the proposed methodology. In our experiment, all the stones composing the slope are clear and have almost identical size, i.e., they have relatively low roughness. However, in the real application, the particles composing the slopes are dirty, e.g., with impurities, vegetation that grew around it and lichen, irregular in different areas. This maybe result in the roughness in different areas varies greatly, and then somehow influence the accuracy of the volume change estimation results. Therefore, an additional step is to assess the roughness of the object surface before implementing the proposed methodology. Several roughness assessment methods have been proposed, e.g., in multiple past papers [
65,
66], based on of which the raw point cloud could be cleared.


 and
and 



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}