Fifteen Years of Cal/Val Service to Reference Altimetry Missions: Calibration of Satellite Altimetry at the Permanent Facilities in Gavdos and Crete, Greece



 ,
,  and
and
Abstract
:
1. Introduction
2. The Permanent Facility for Altimeter Calibration
2.1. Infrastructure and Instrumentation
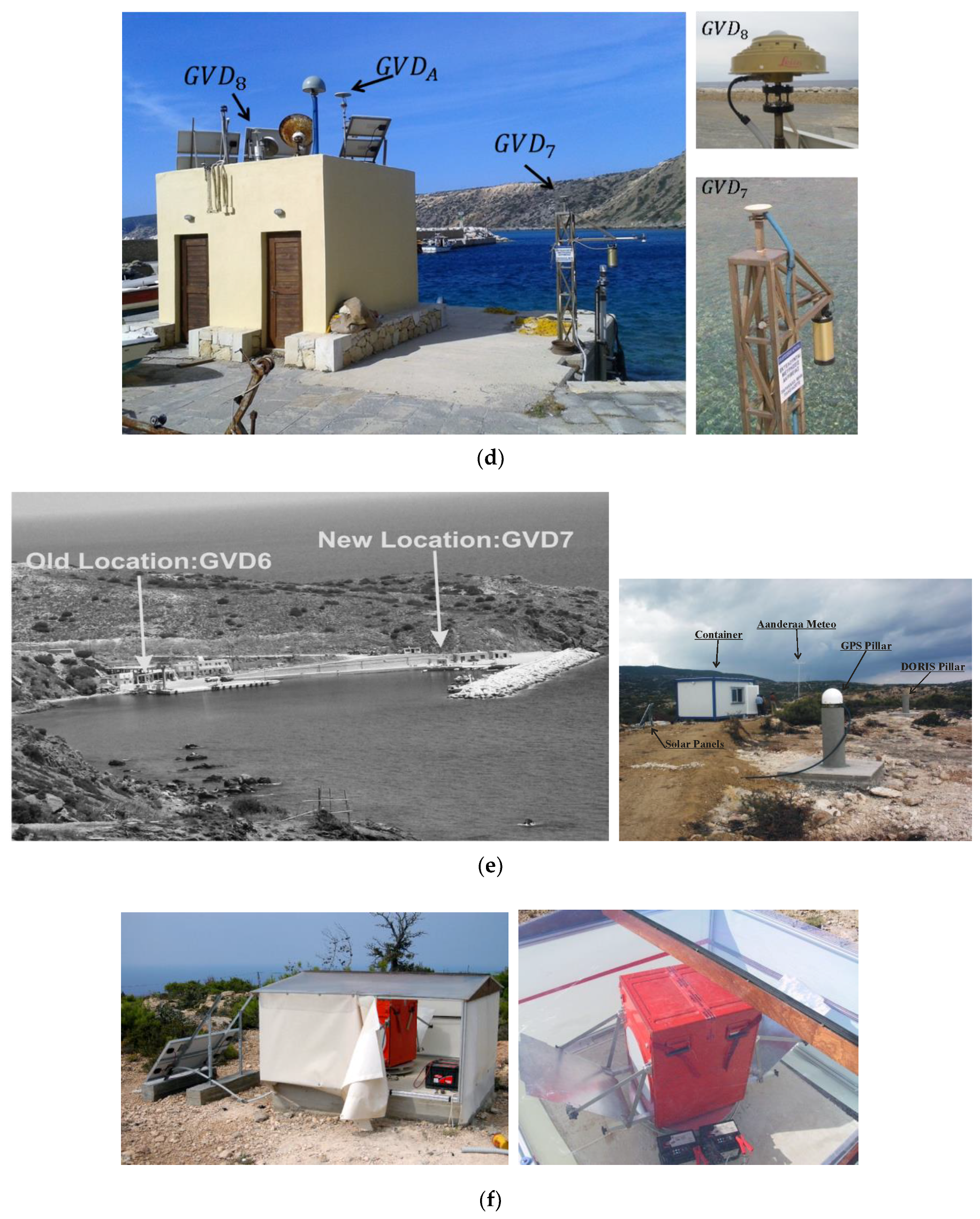
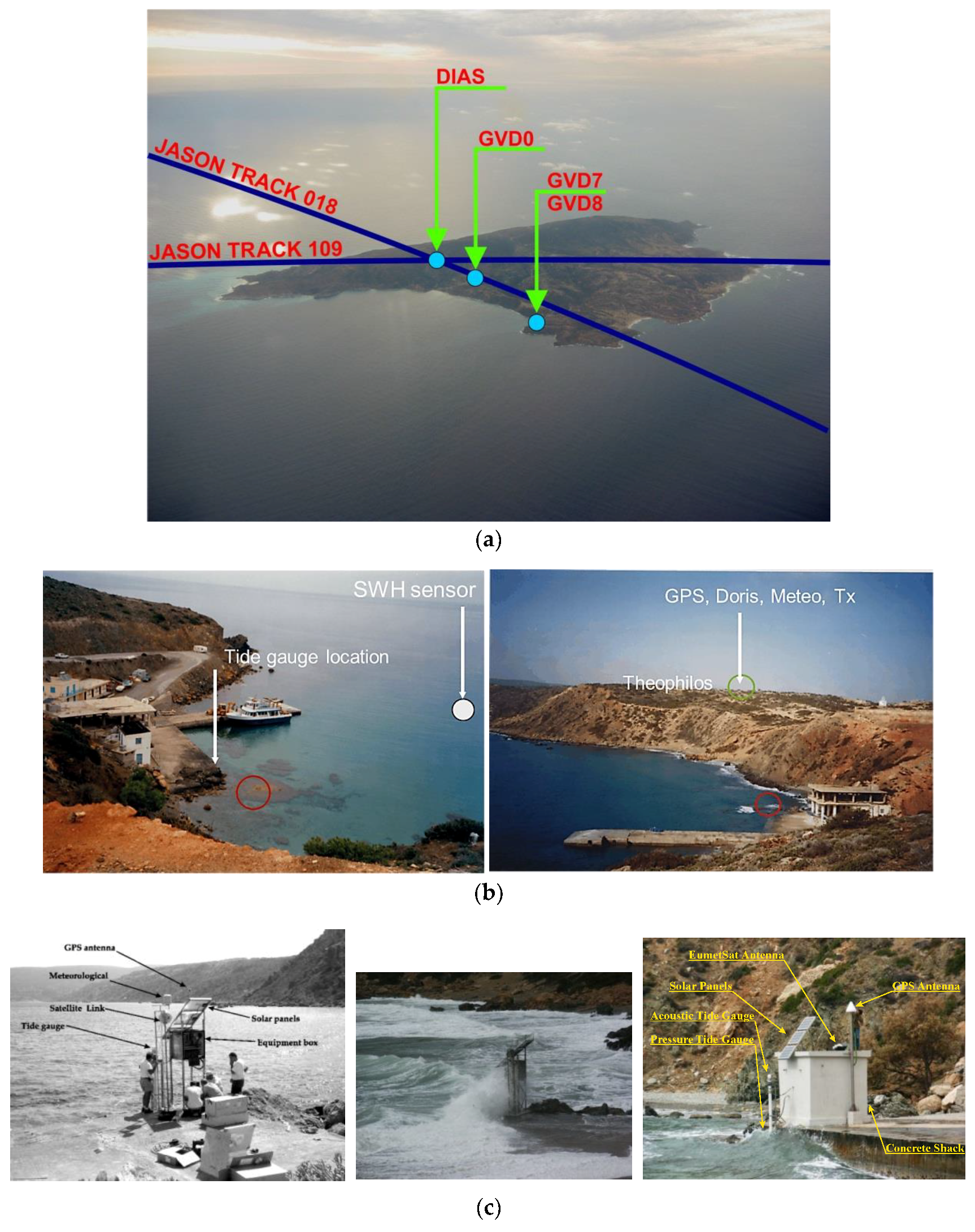
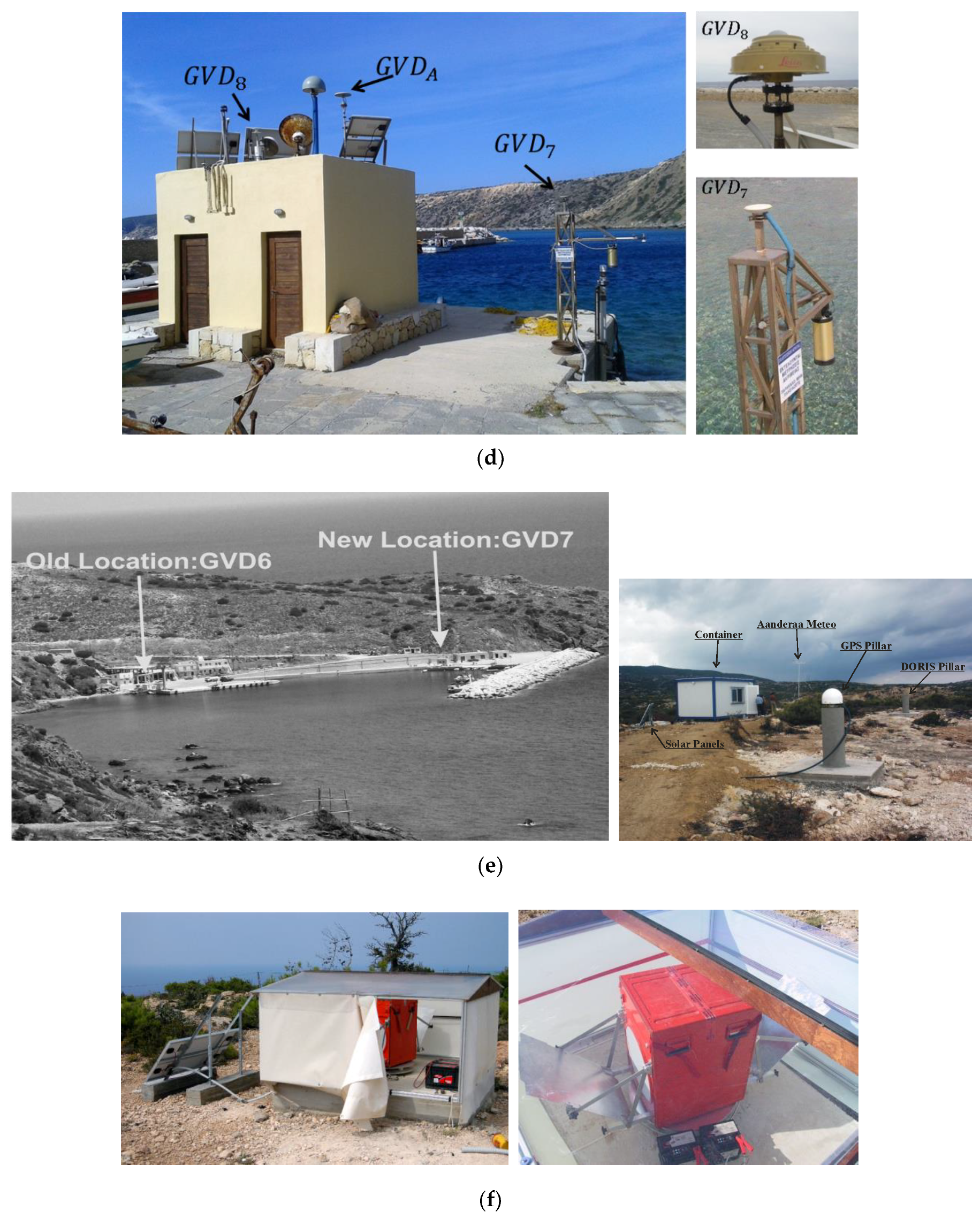
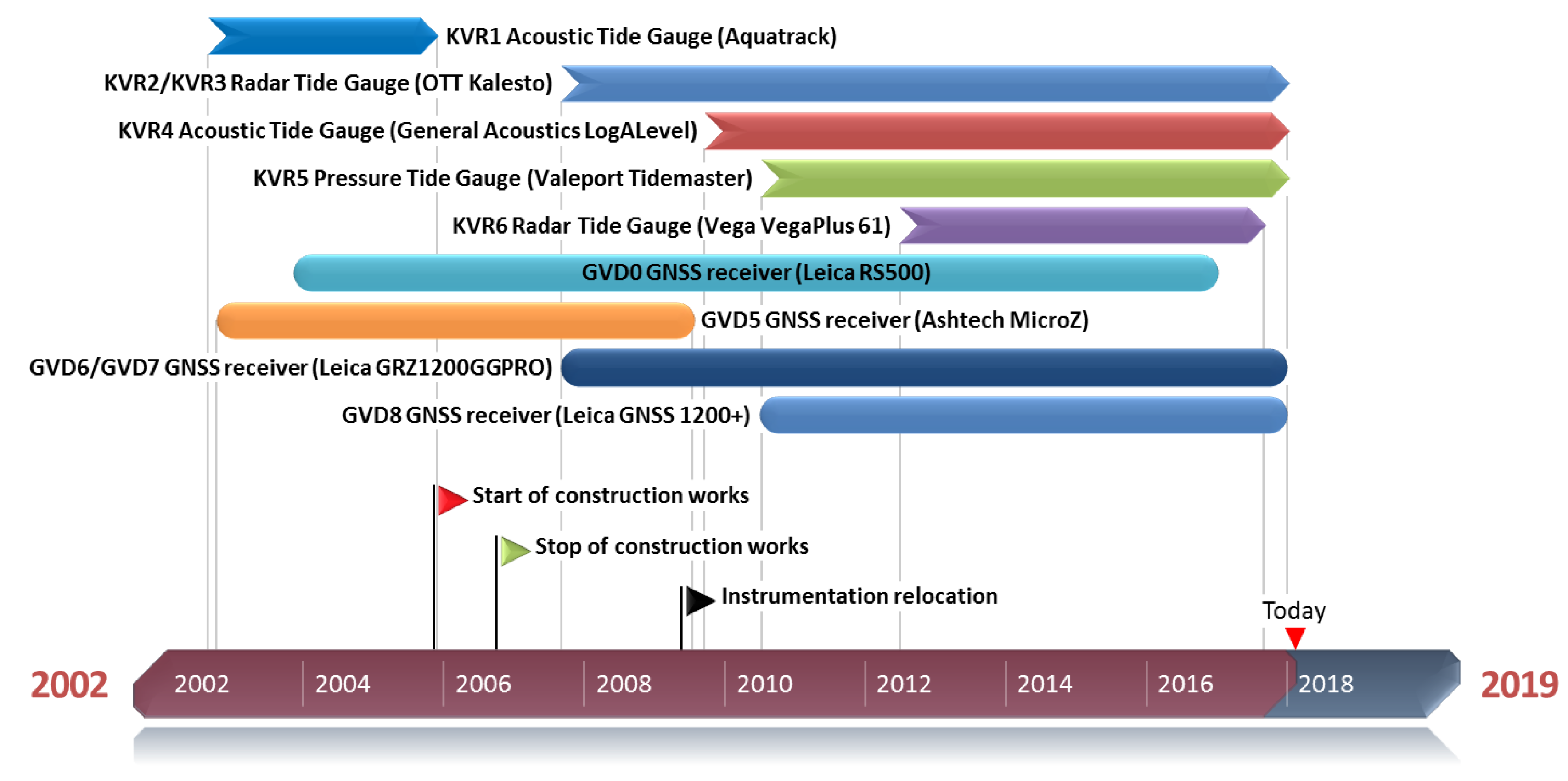
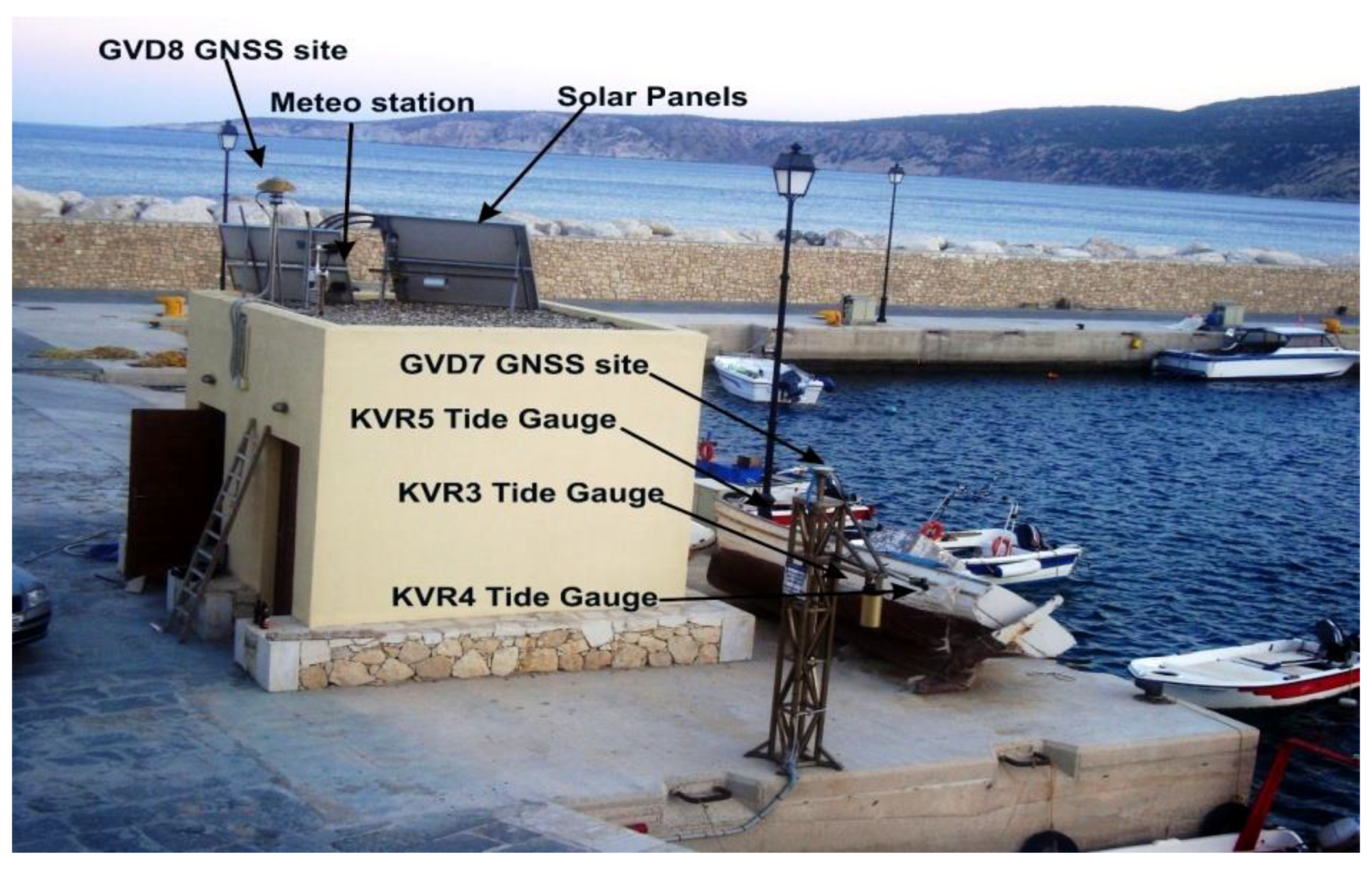
2.1.1. The Gavdos Cal/Val Site
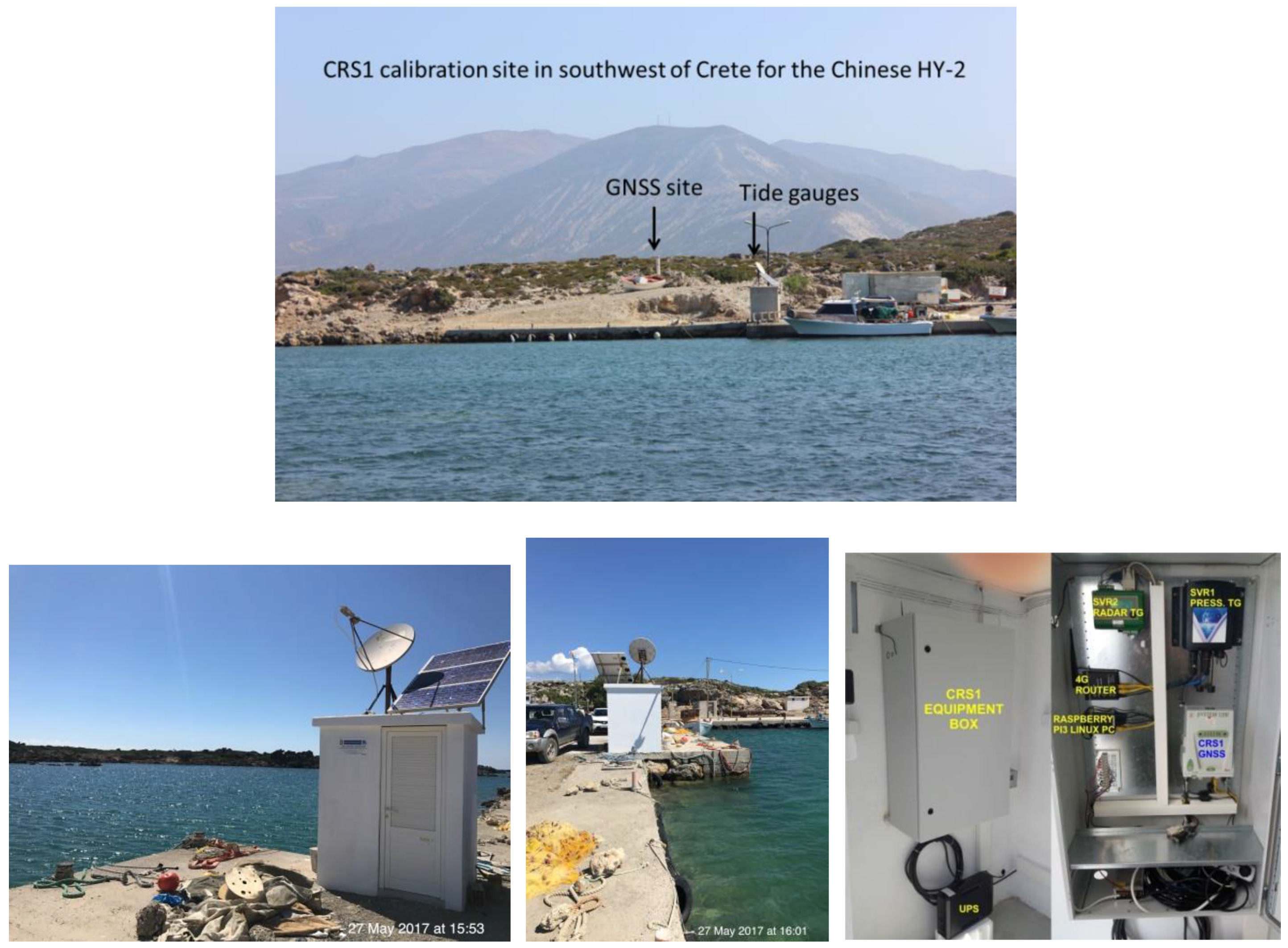
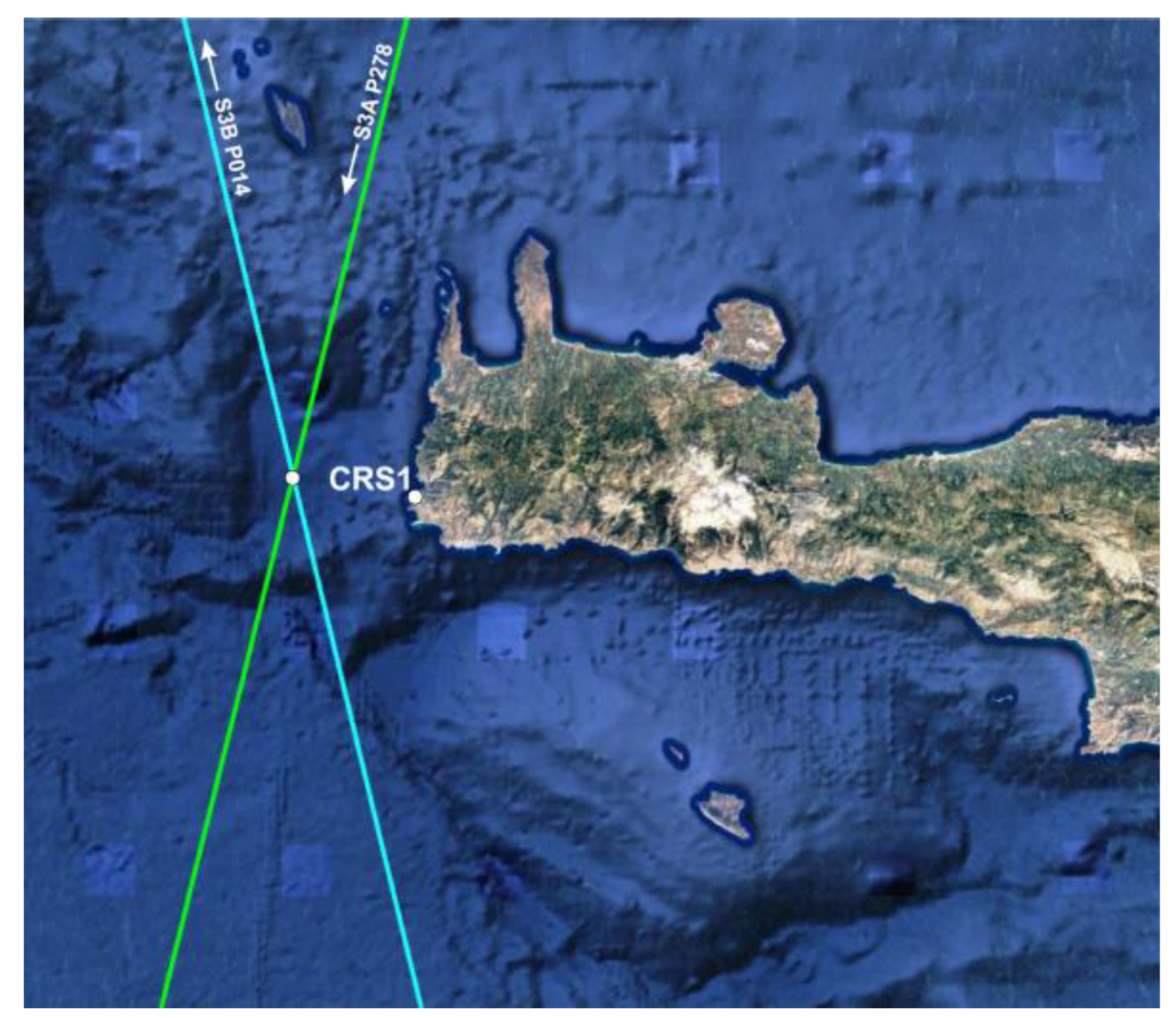
2.1.2. The CRS1 Cal/Val Site
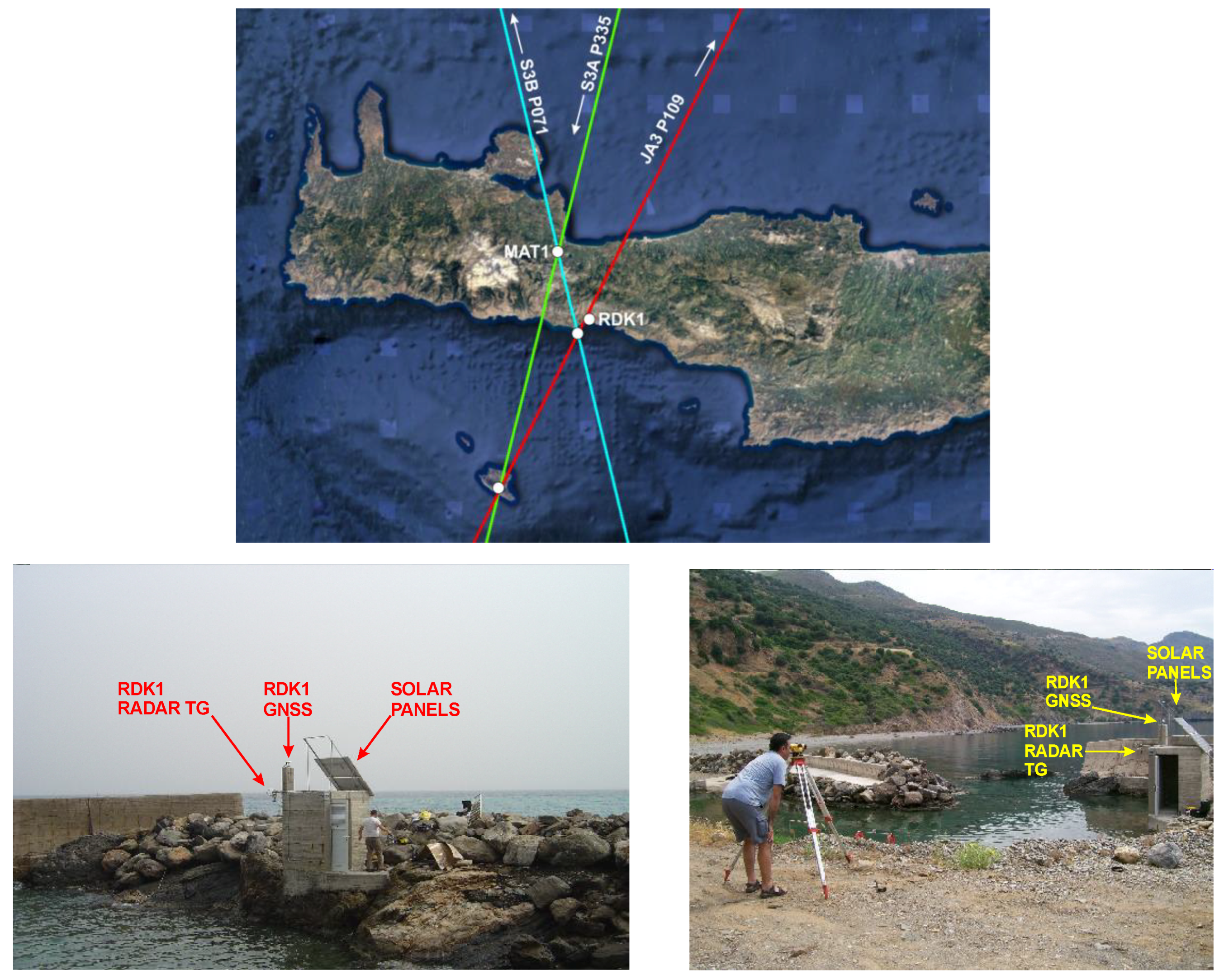
2.1.3. The RDK1 Cal/Val Site
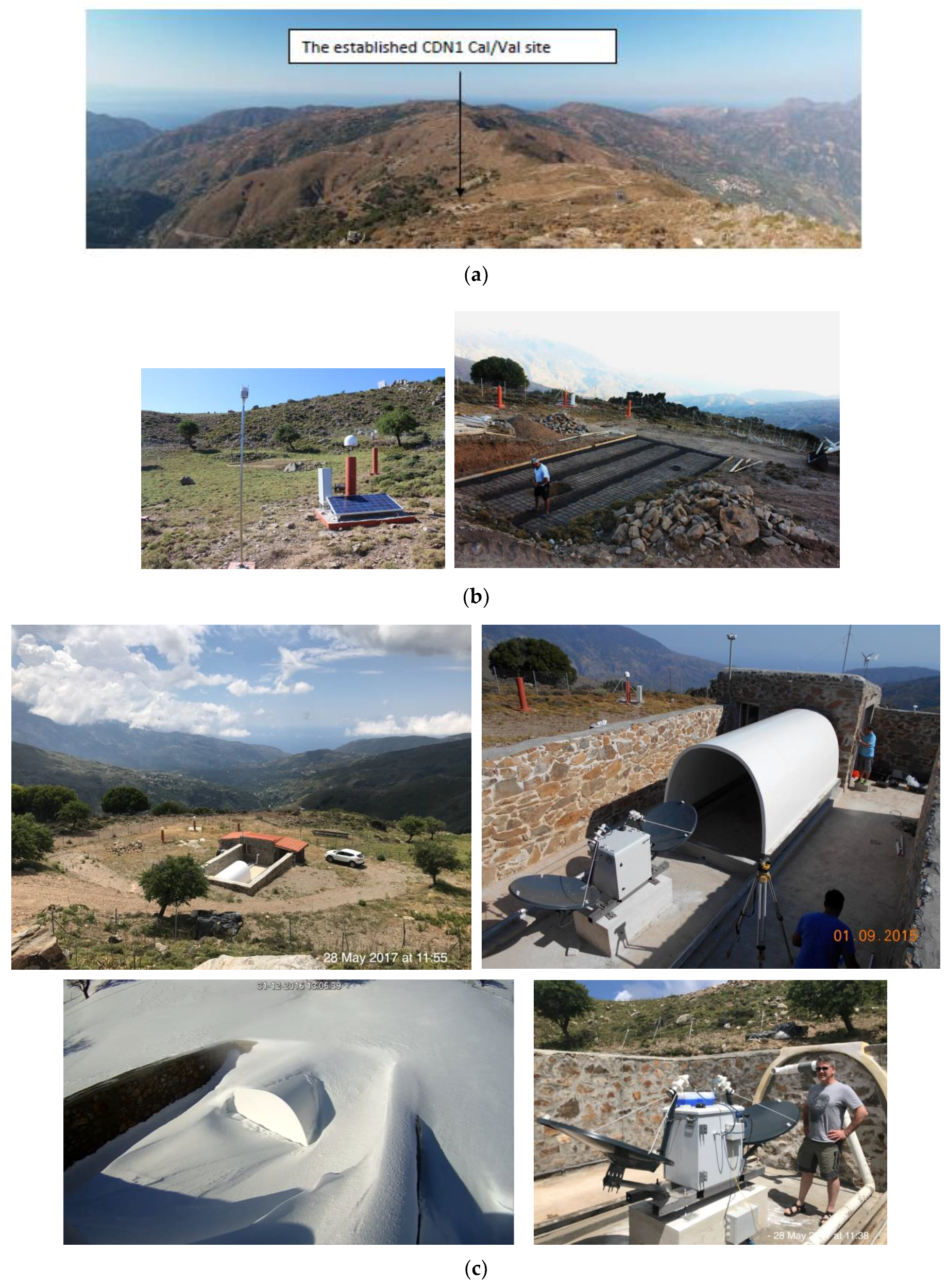
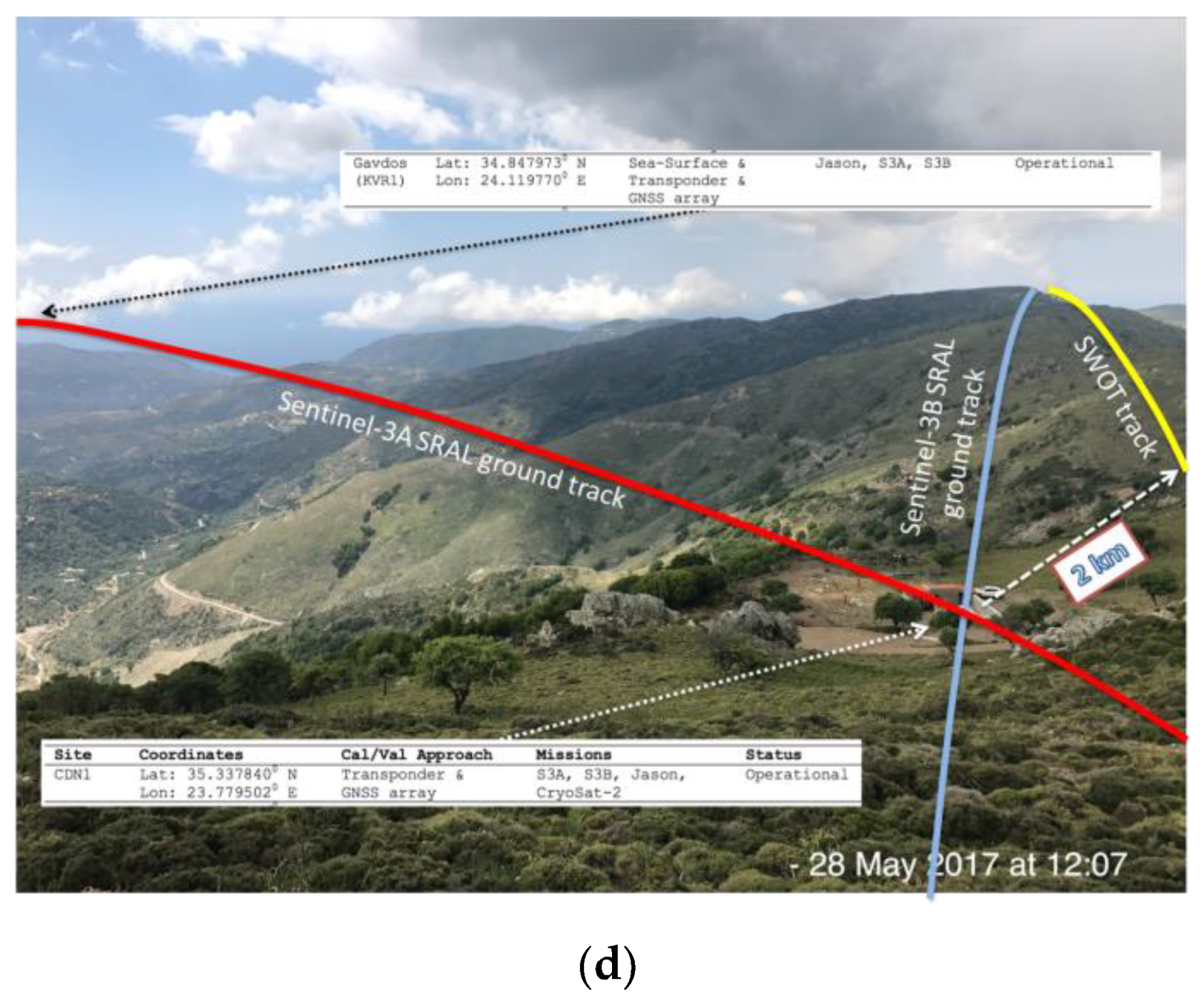
2.1.4. The CDN1 Transponder Cal/Val Site
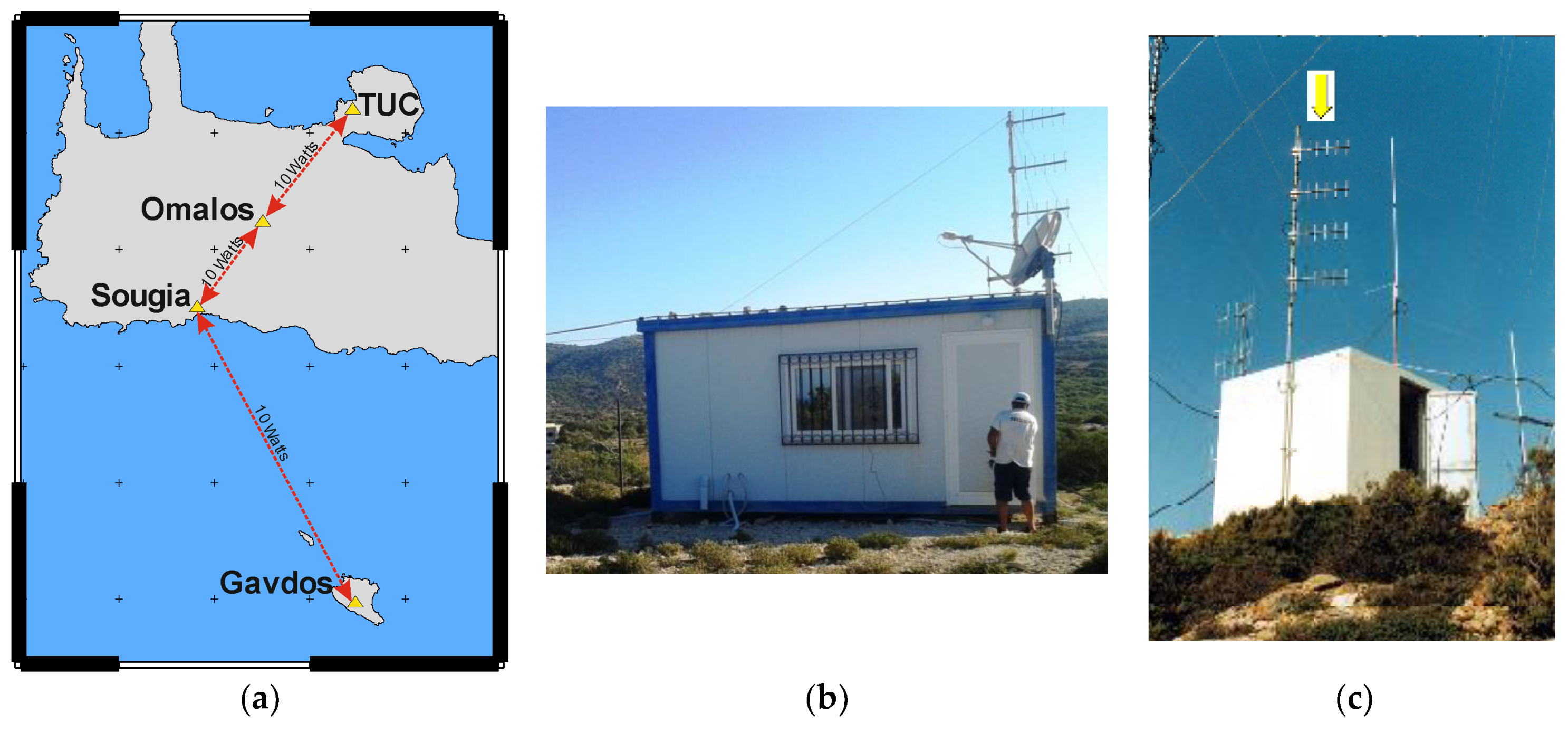
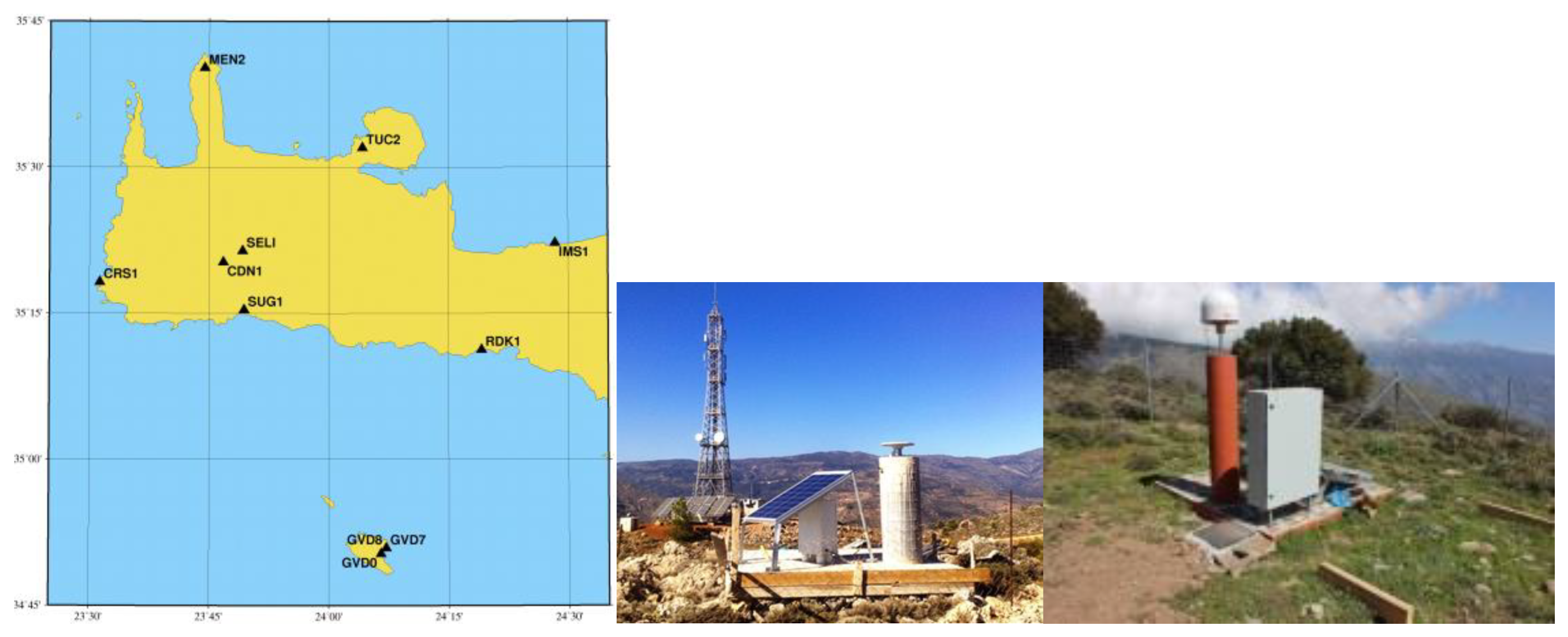
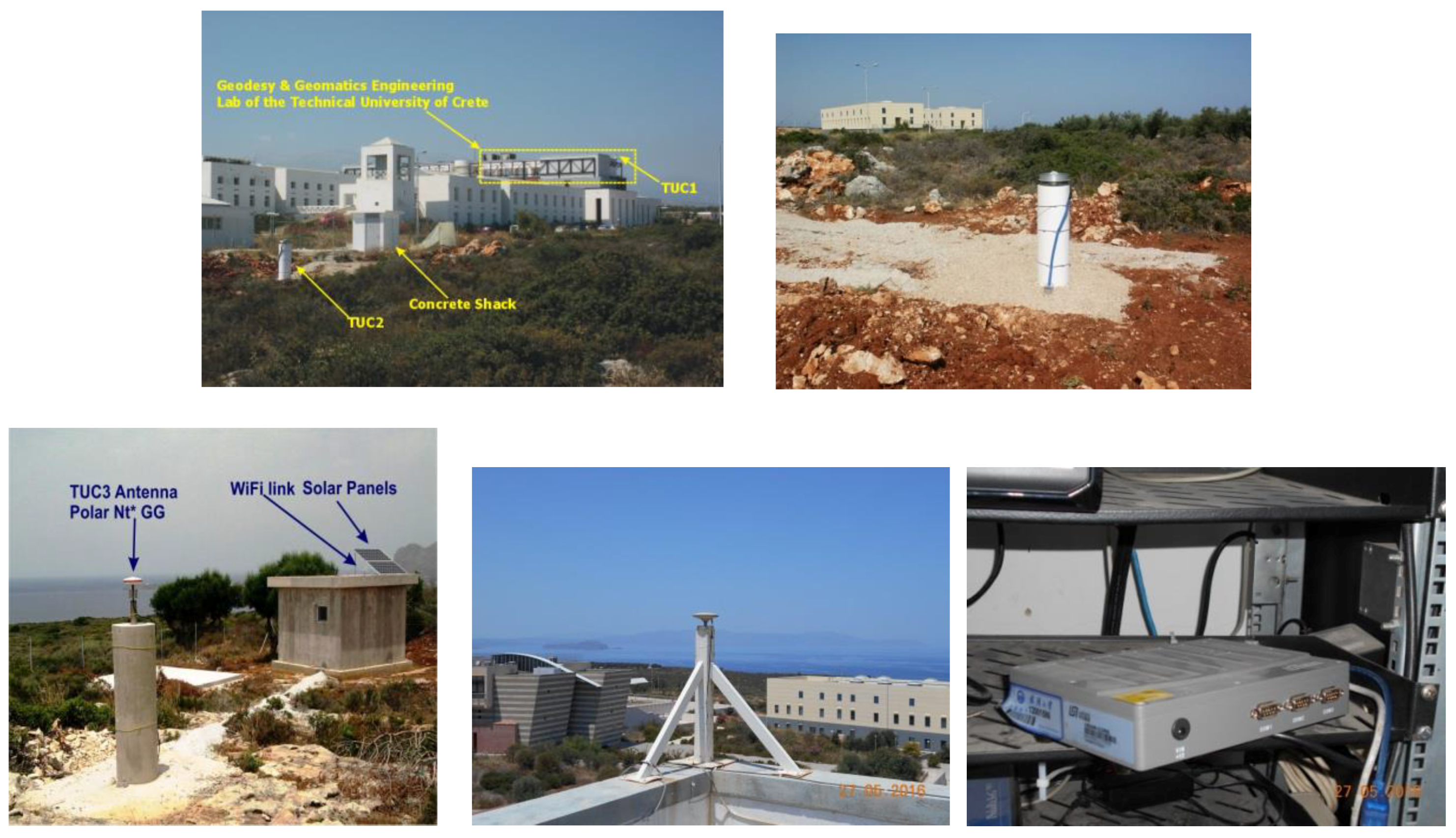
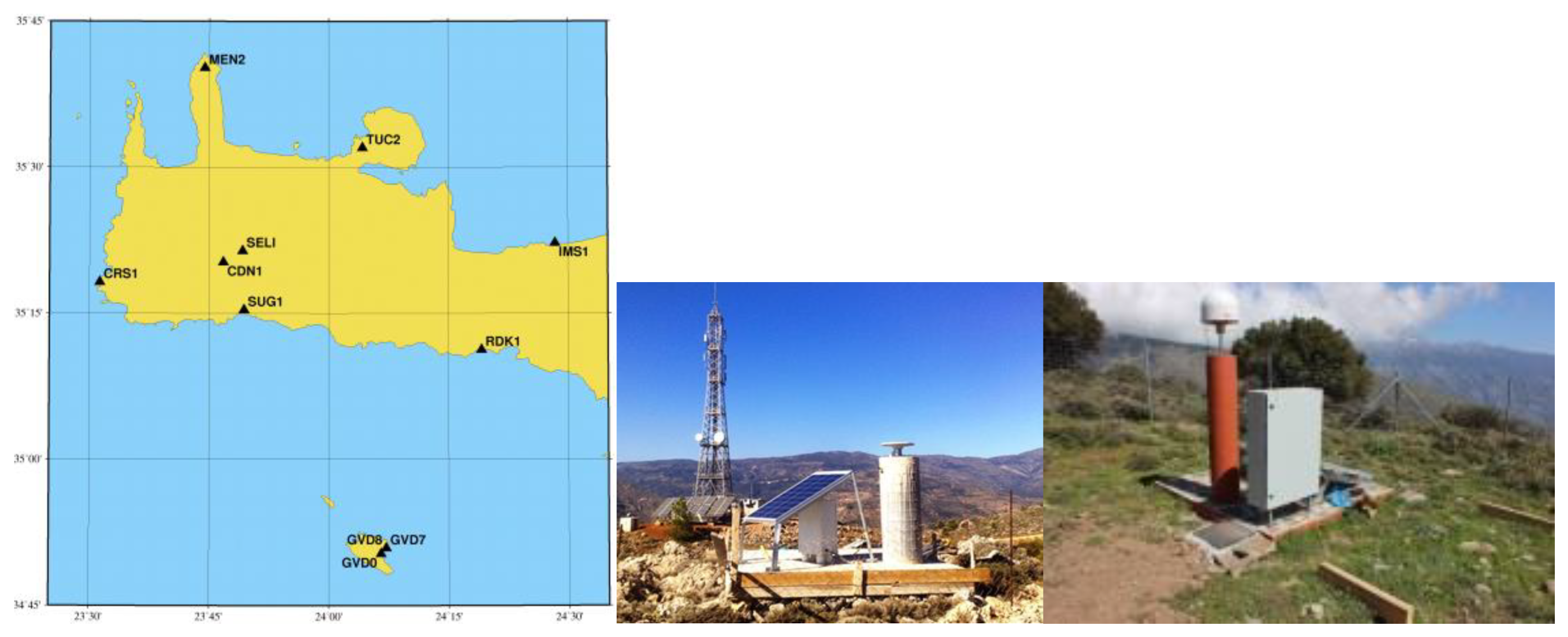
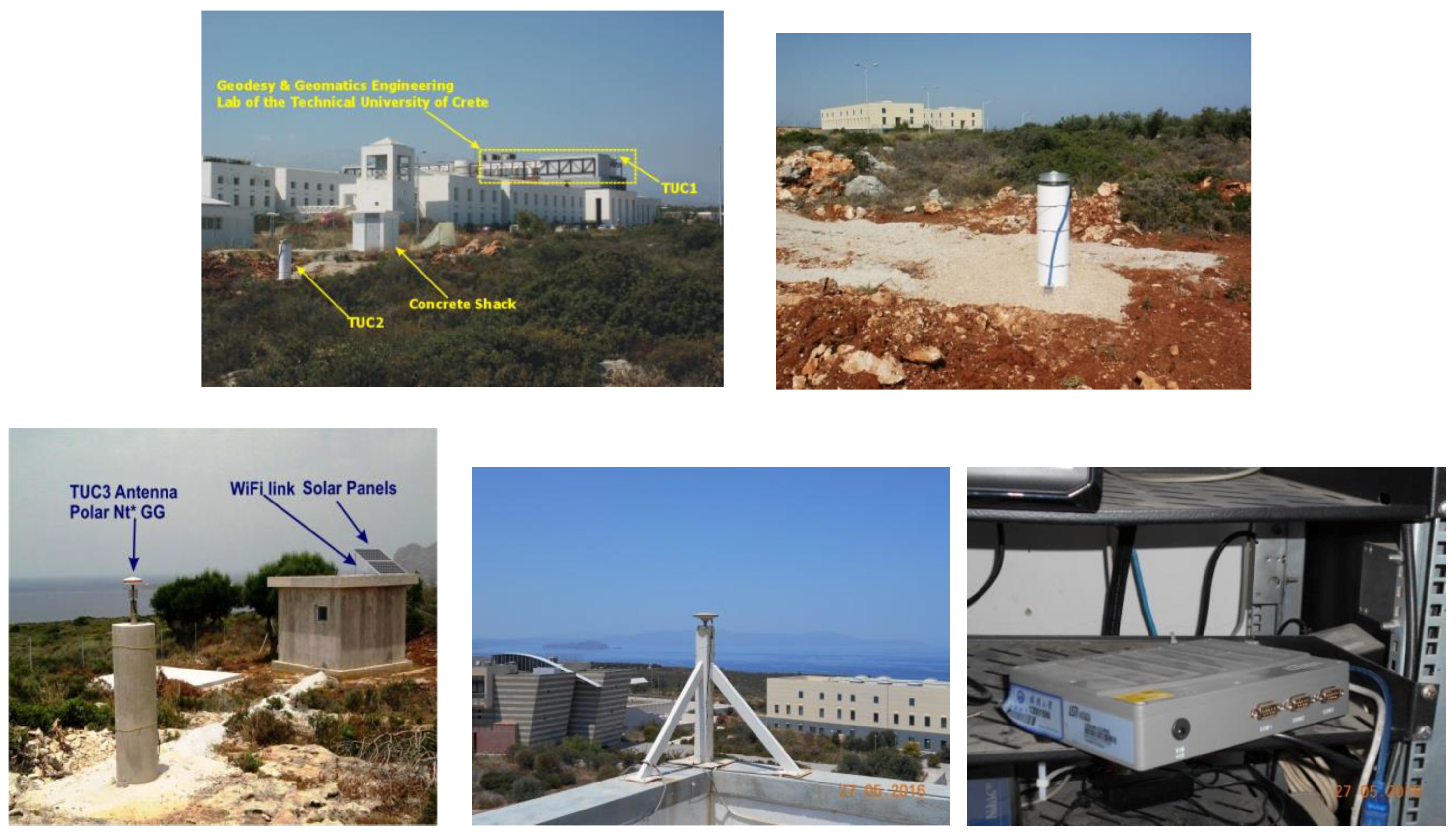
2.1.5. The GNSS Monitoring Network
2.1.6. The Operations Control Center
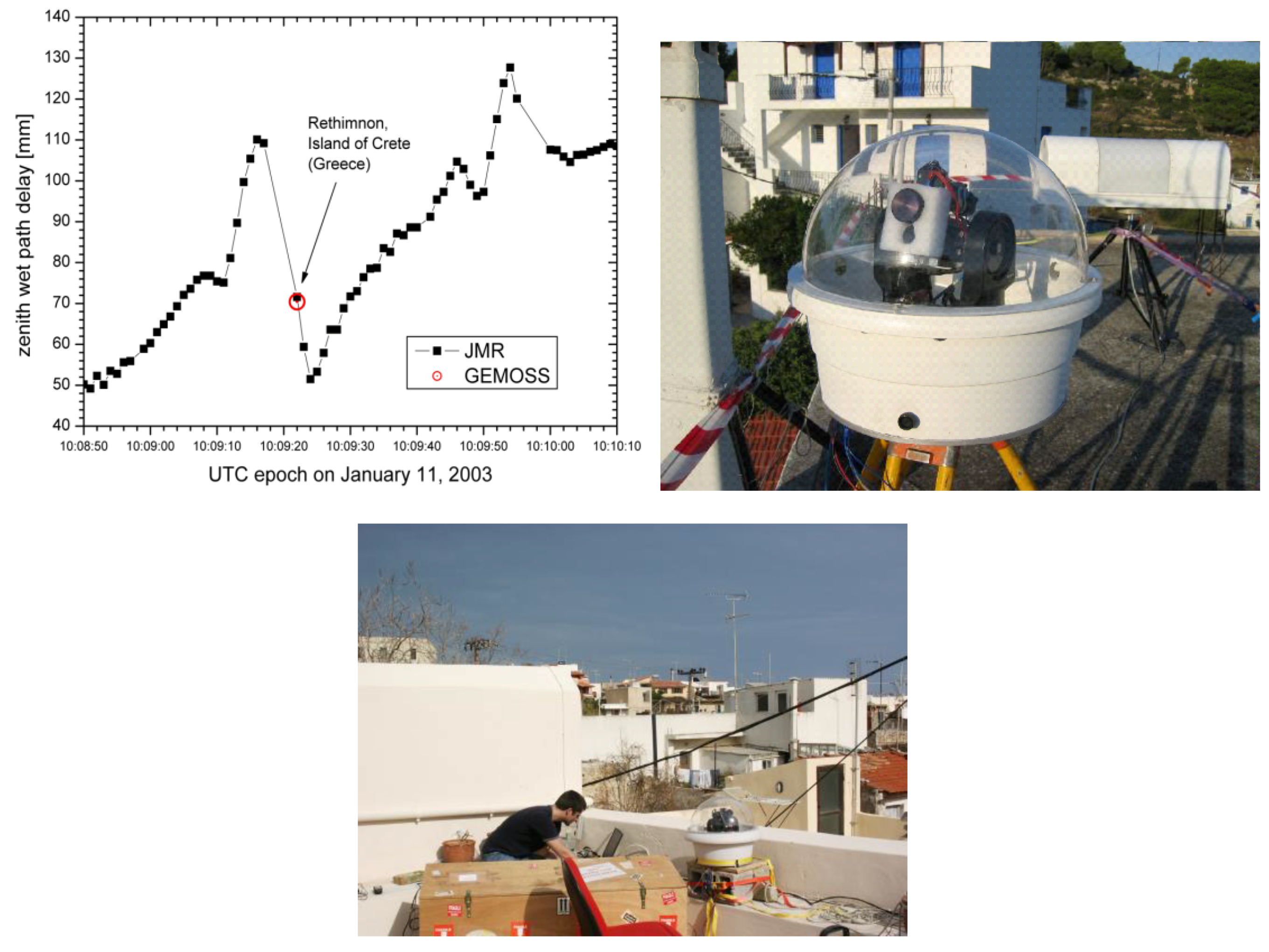
2.2. Regional Models and Reference Surfaces
3. Sea-Surface Calibration Results
4. Transponder Calibration Results
4.1. Transponder Versus Sea-Surface Biases: Jason-2 and Jason-3
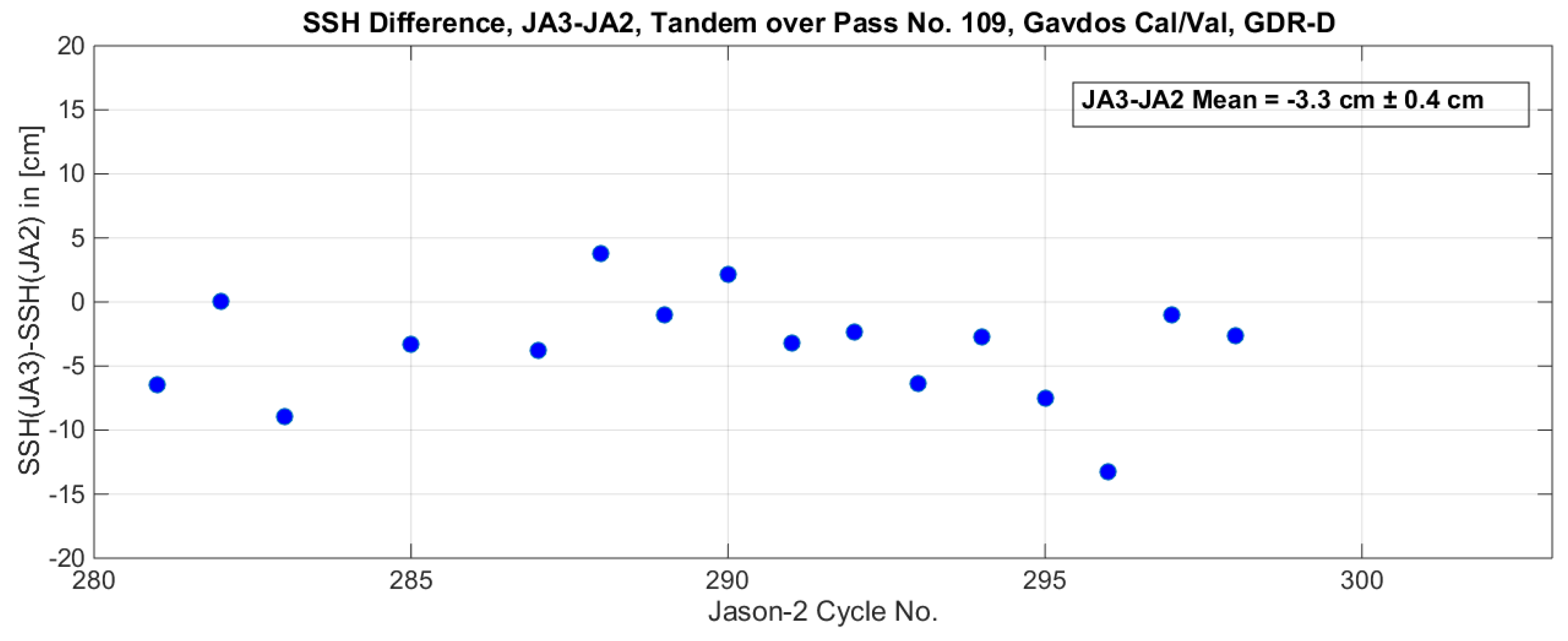
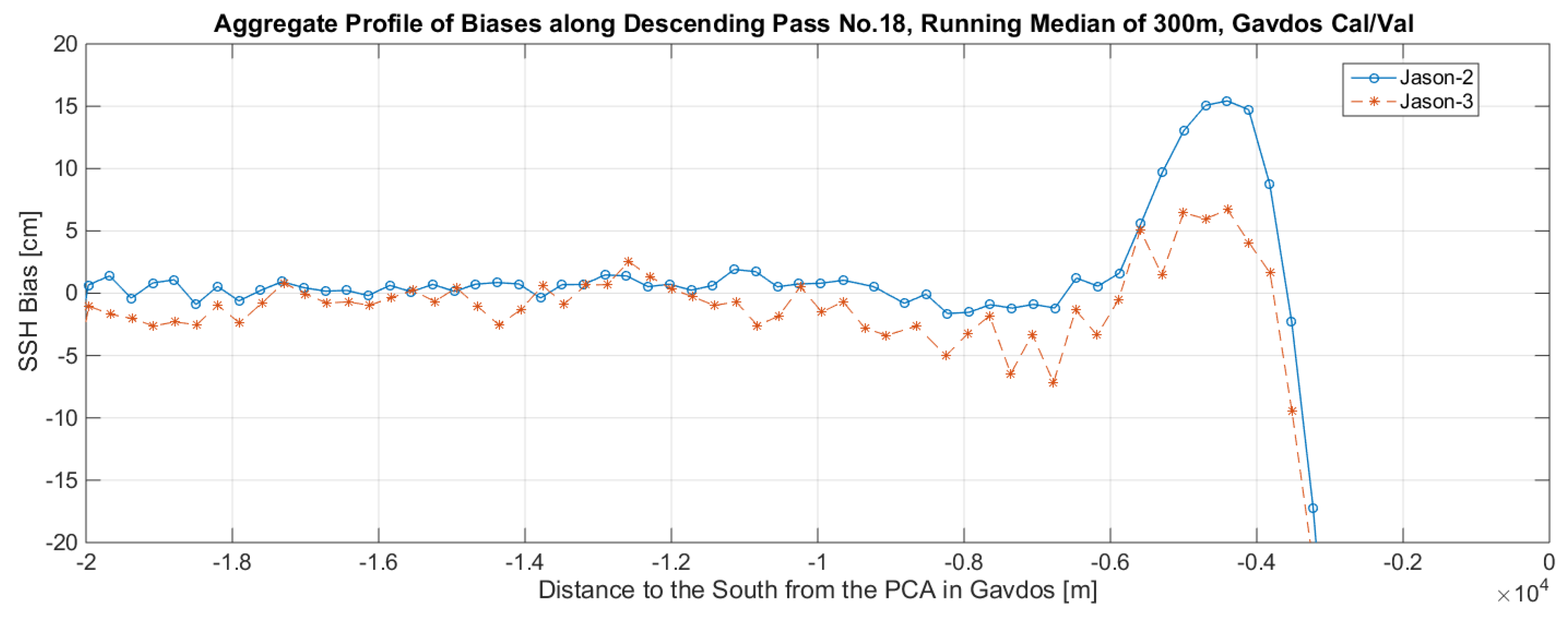
4.2. Tandem Mission for Jason-2 and Jason-3
5. Crossover Calibration Results
6. Conclusions
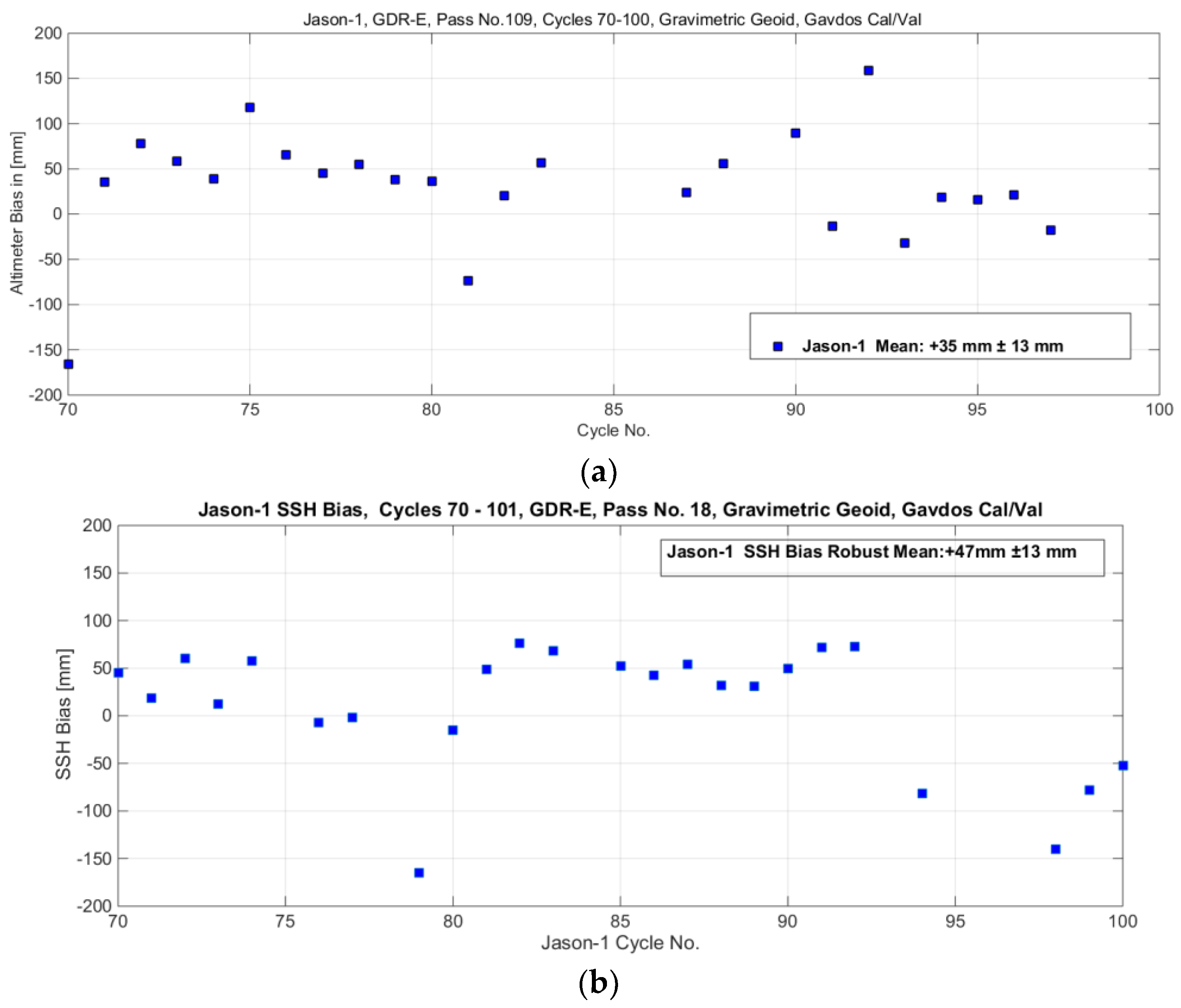
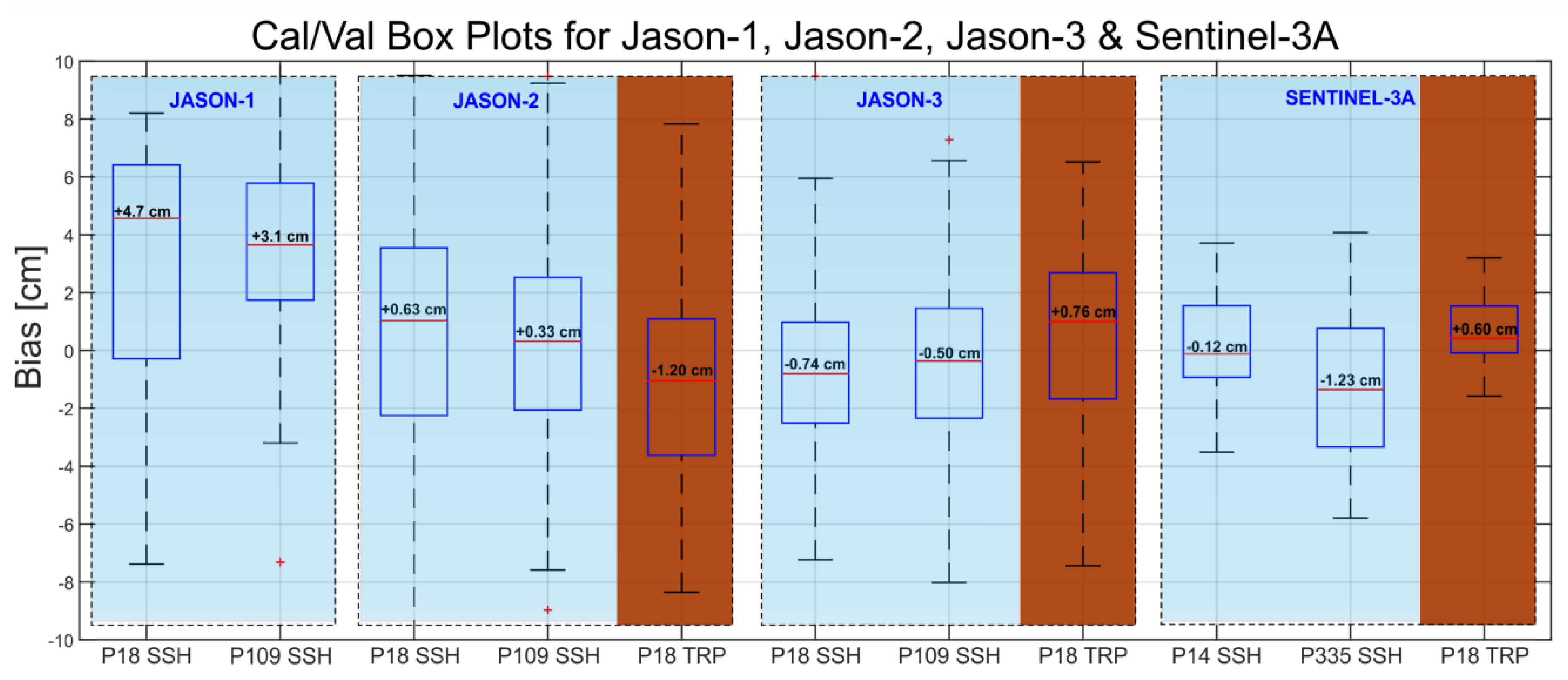
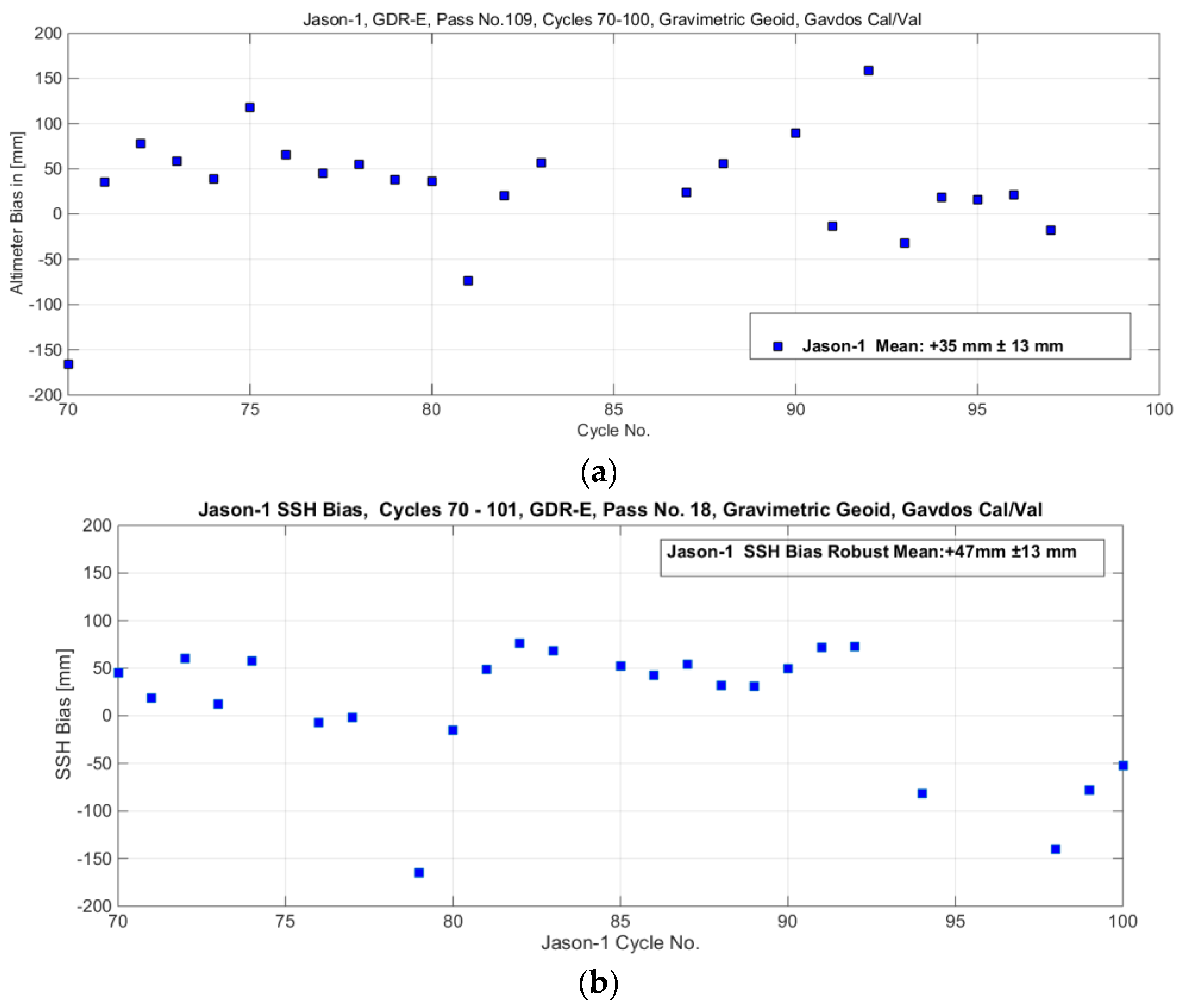
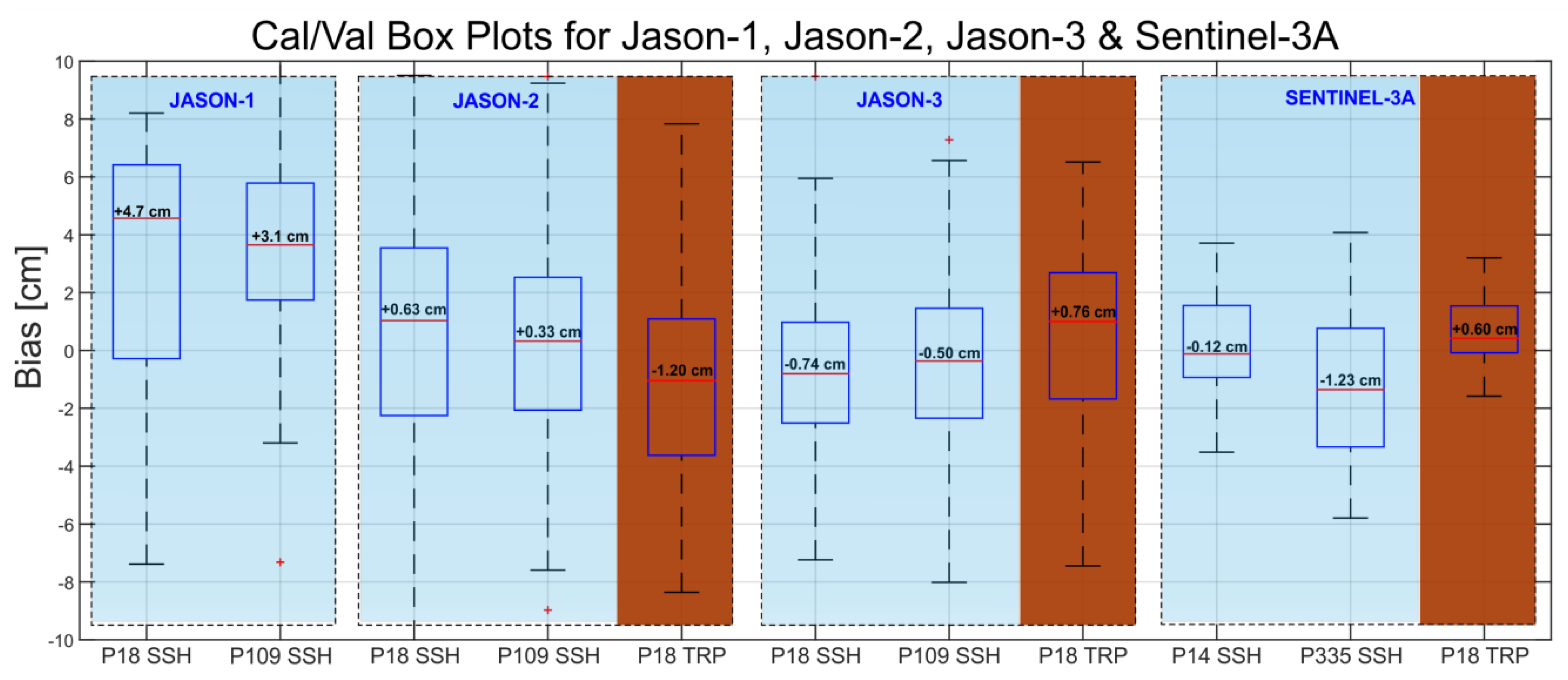
- Jason-1 has produced a sea-surface height bias of +3.5 cm and +4.7 cm along the ascending and the descending orbits, respectively, around Gavdos. The mean value of this Jason-1 altimeter comes to +4.1 cm based on cycles 70 to 100 and the GRD-E data products.
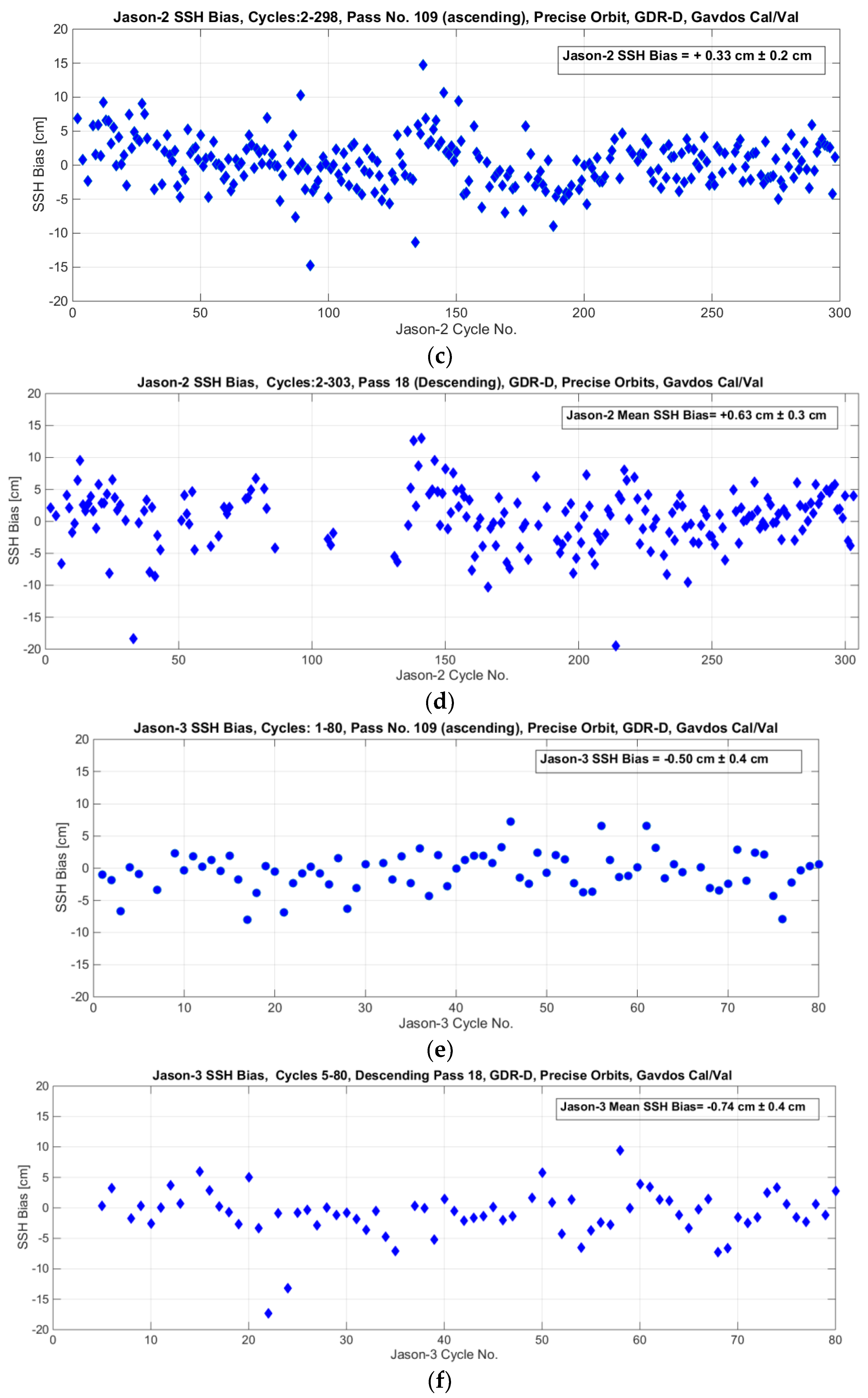
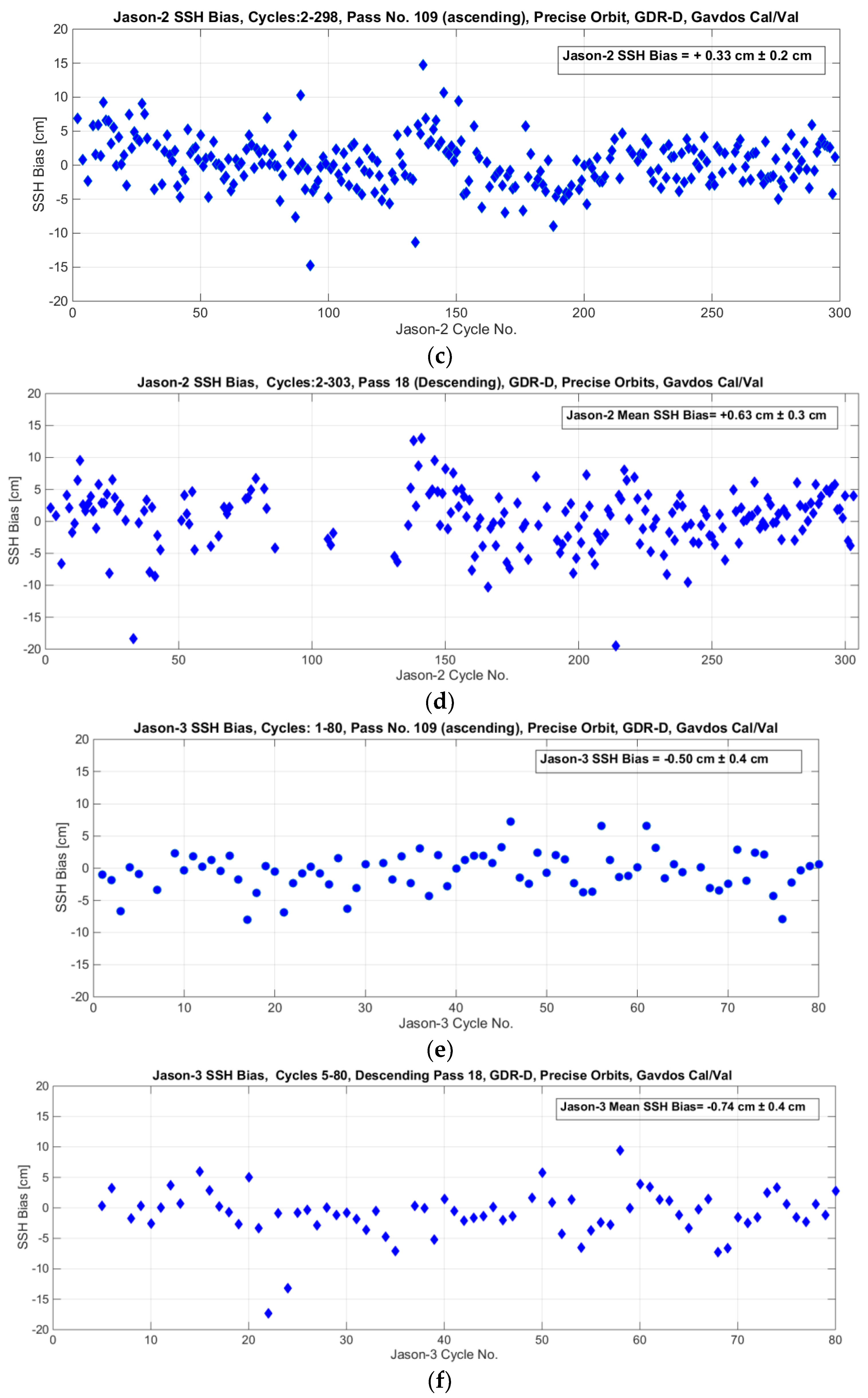
- Jason-2 exhibits an altimeter bias in determining sea-surface heights of +0.33 cm (ascending No. 109) and to a value of +0.63 cm for its descending orbit No. 18. Hence, the mean value for Jason-2 comes to almost zero (i.e., +0.48 cm). These results were based on the Gavdos Cal/Val, and Cycles 2–303 with GDR-D data products for Jason-2.
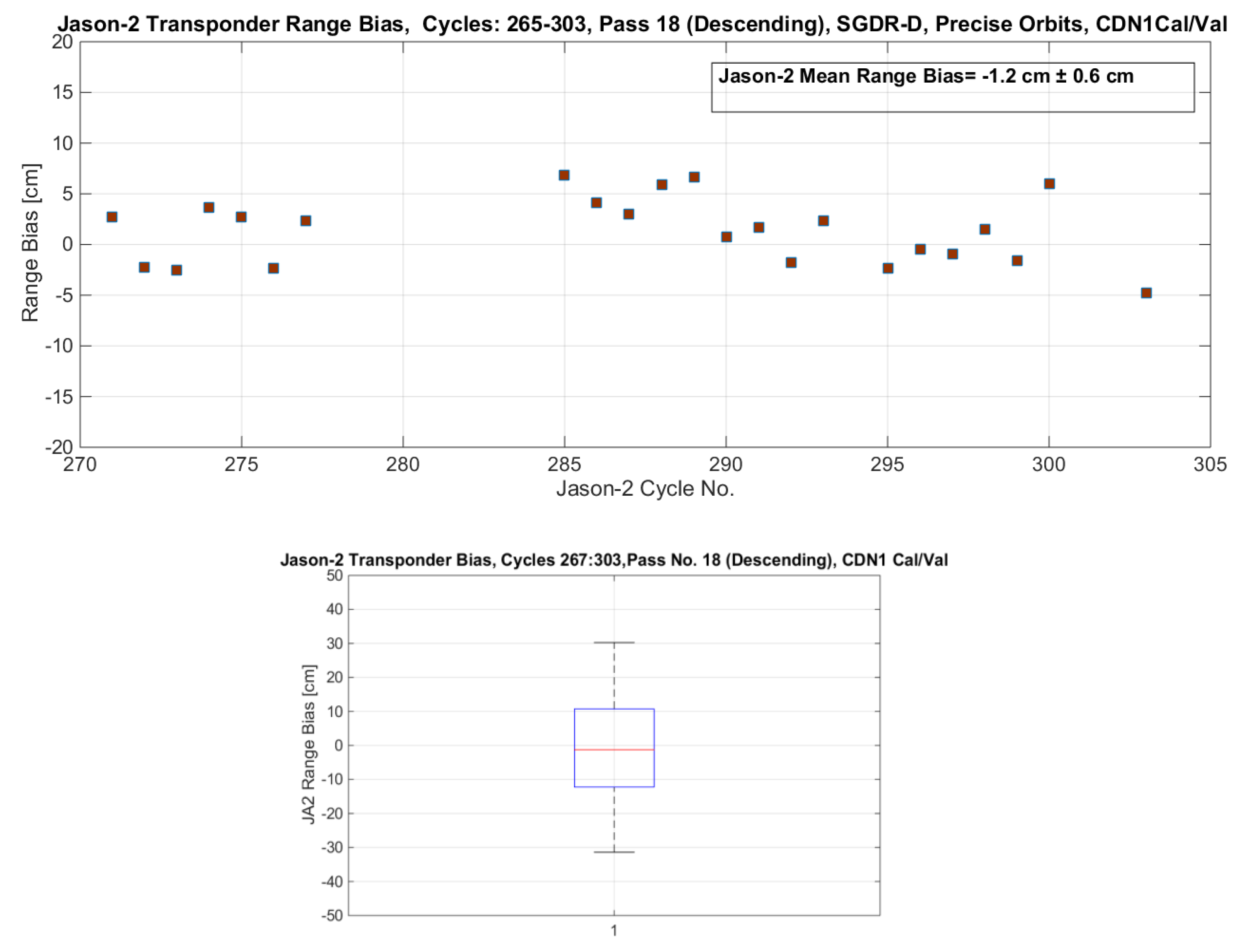
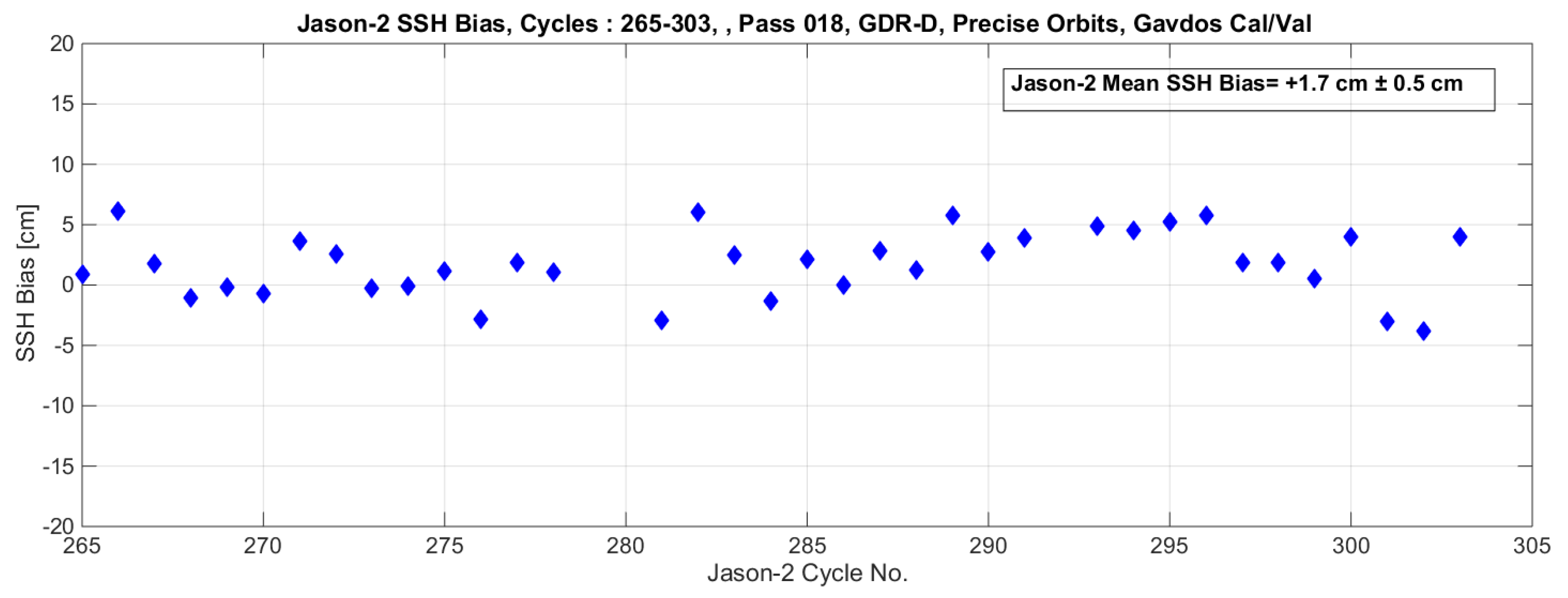
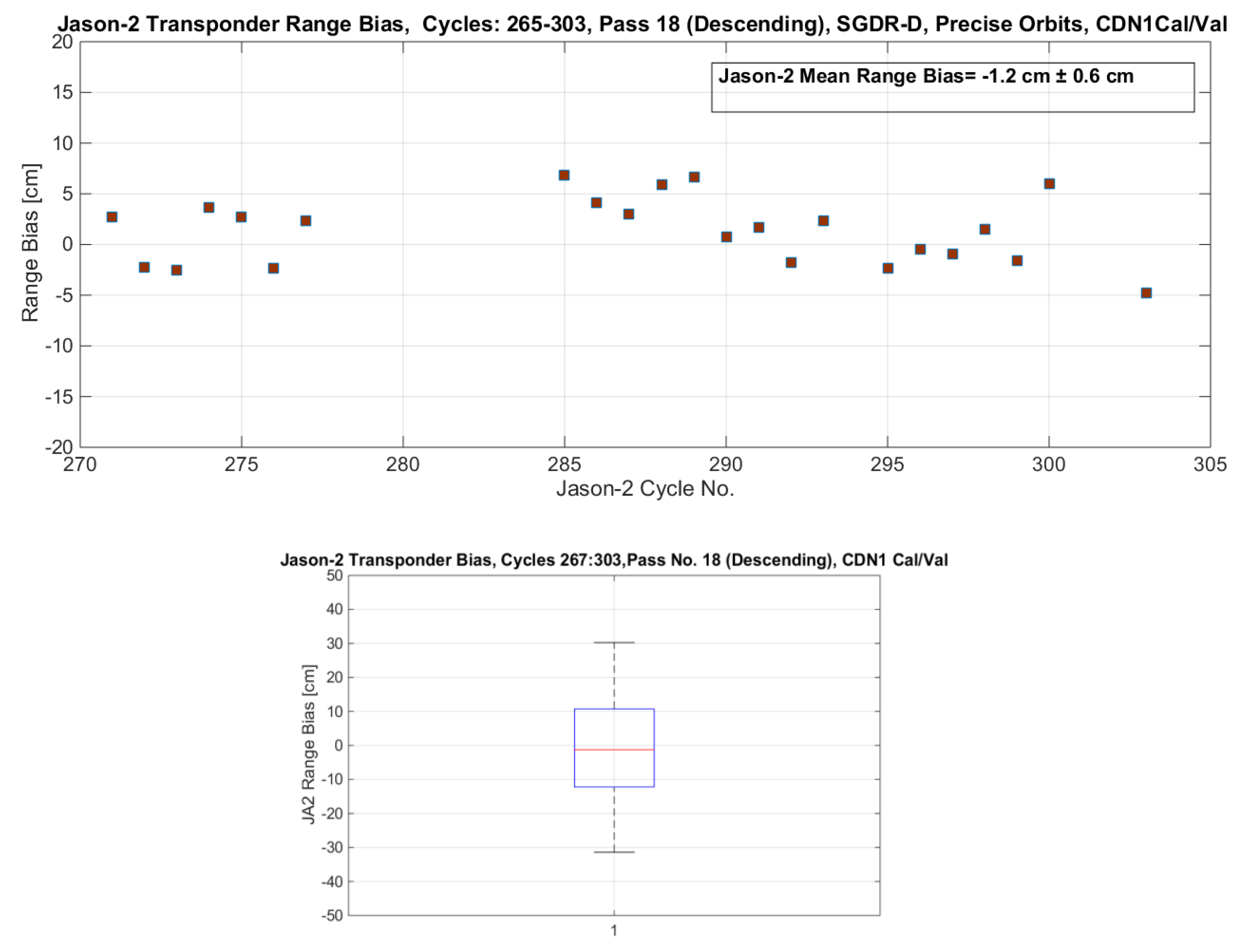
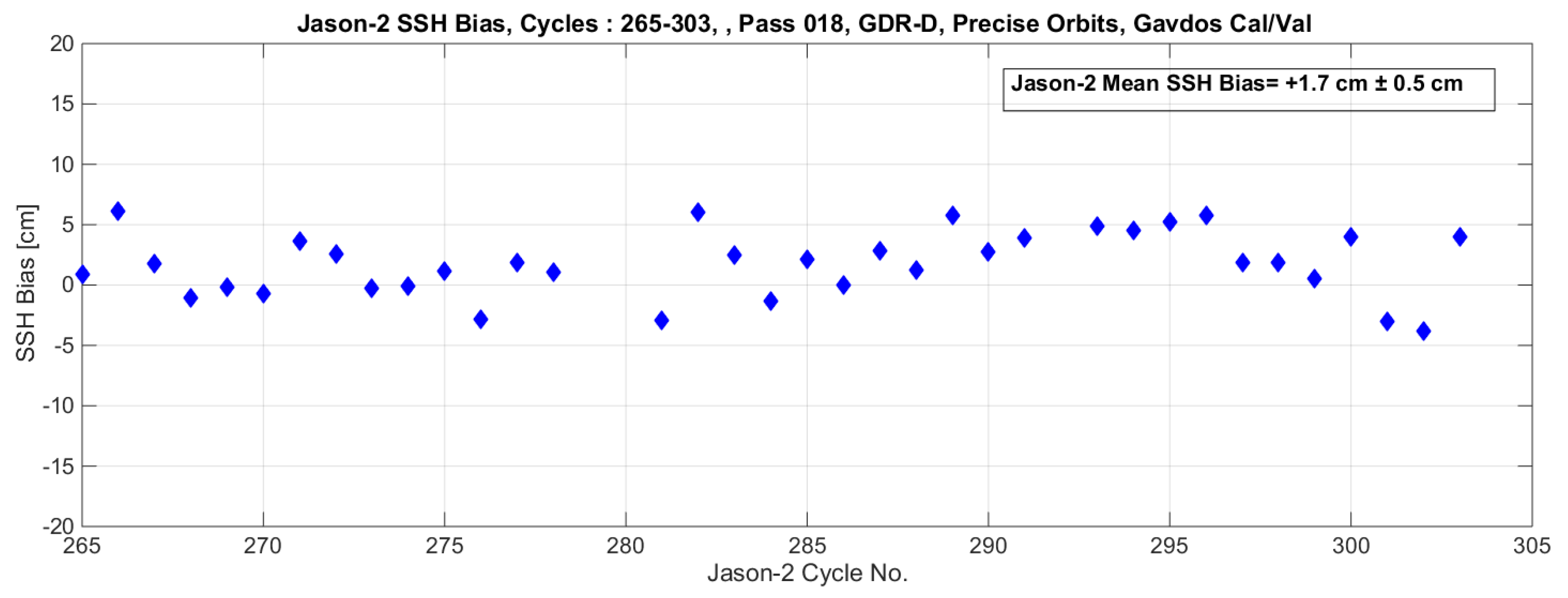
- The transponder at CDN1 Cal/Val facility has produced a range bias for Jason-2 of −1.2 cm for Cycles 267–303 with SGDR-D and Level-2 data products. The associated SSH bias of Jason-2 along Pass No. 18 for the same cycles amounts to +1.7 cm based on Gavdos Cal/Val facility. Biases derived using transponder and sea surface techniques exhibited absolute values of about the same magnitude but with opposite signs. These results back each other up as they are determined by diverse calibration techniques, different locations, settings, and instrumentation;
- Jason-3 demonstrated a bias at determining sea-surface heights of −0.50 cm along the ascending orbit and −0.74 cm along its descending orbit, as determined by the Gavdos Cal/Val site. Results were based on GDR-D products and its first 80 cycles of Jason-3. The mean value of the SSH bias of Jason-3 came to −0.62 cm when averaged over the ascending and its descending pass.
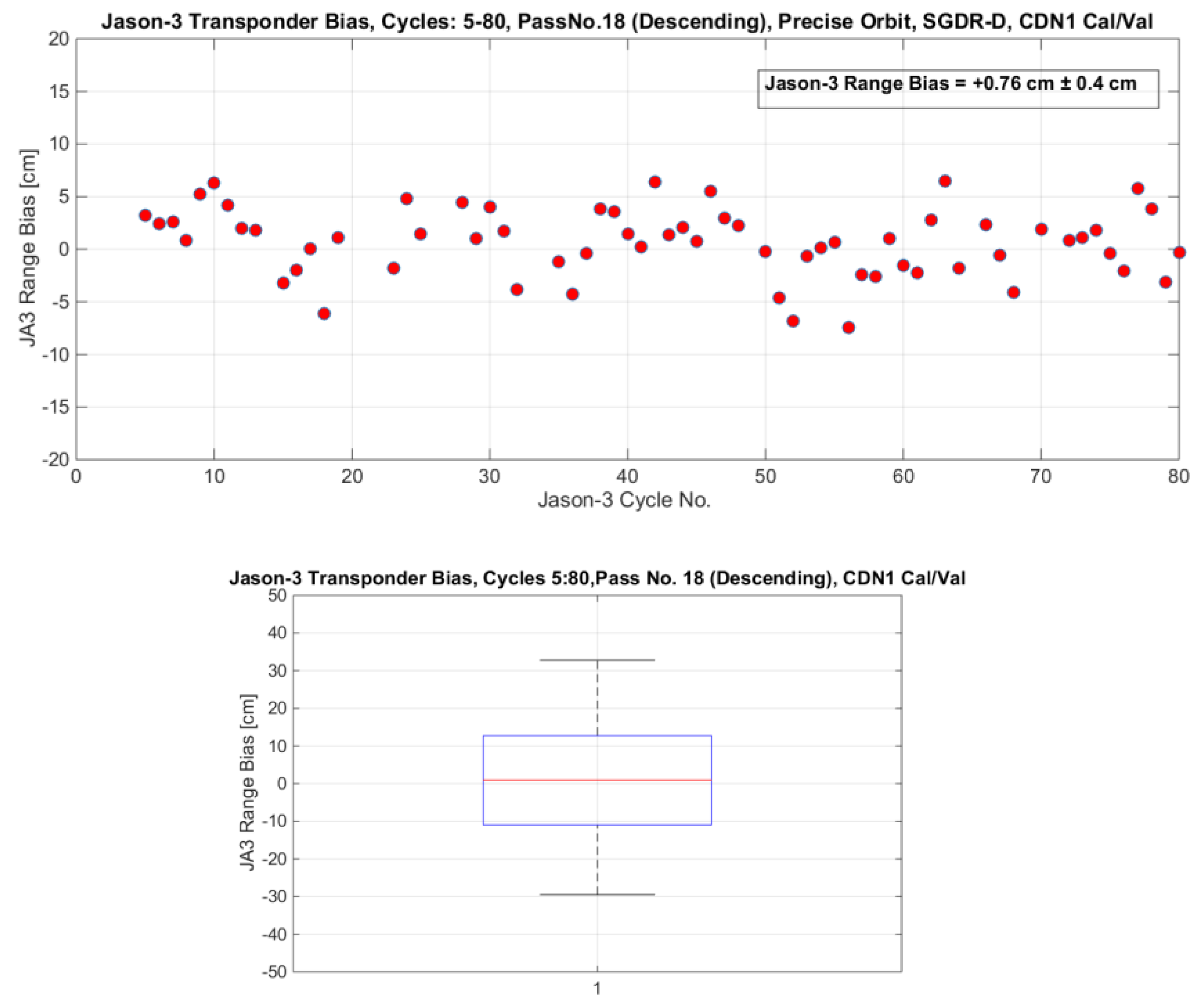
- The transponder at the CDN1 Cal/Val site demonstrated a range bias of +0.76 cm for Jason-3, based on Cycles 5–80 with S-GDR products and precise orbits.
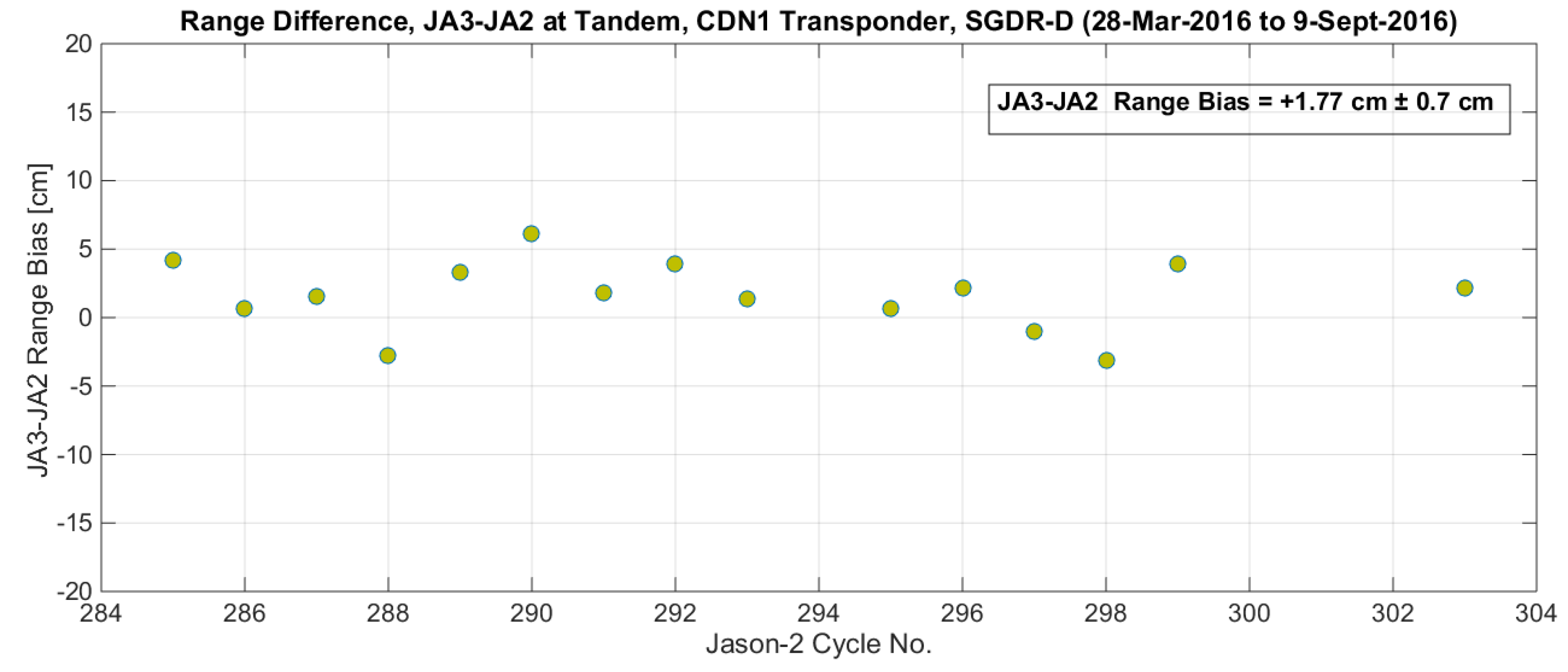
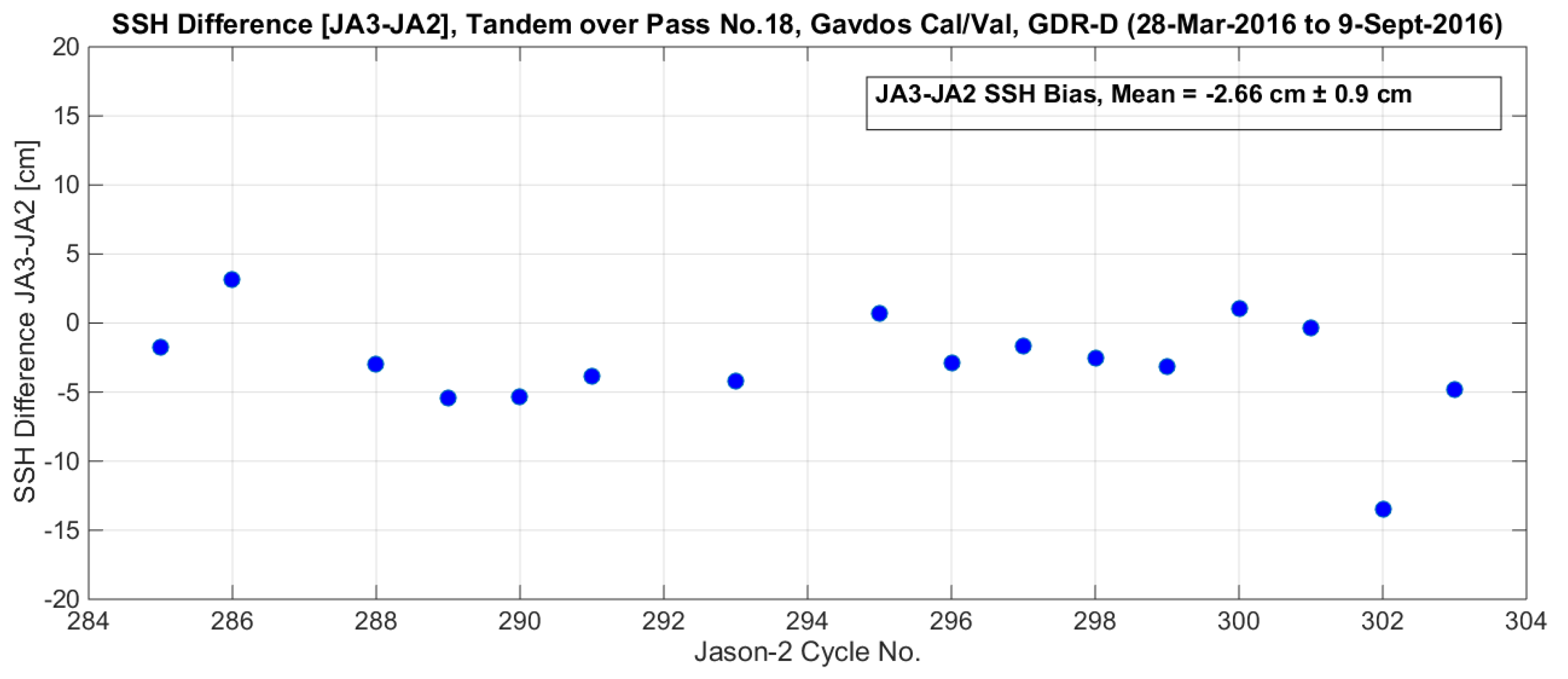
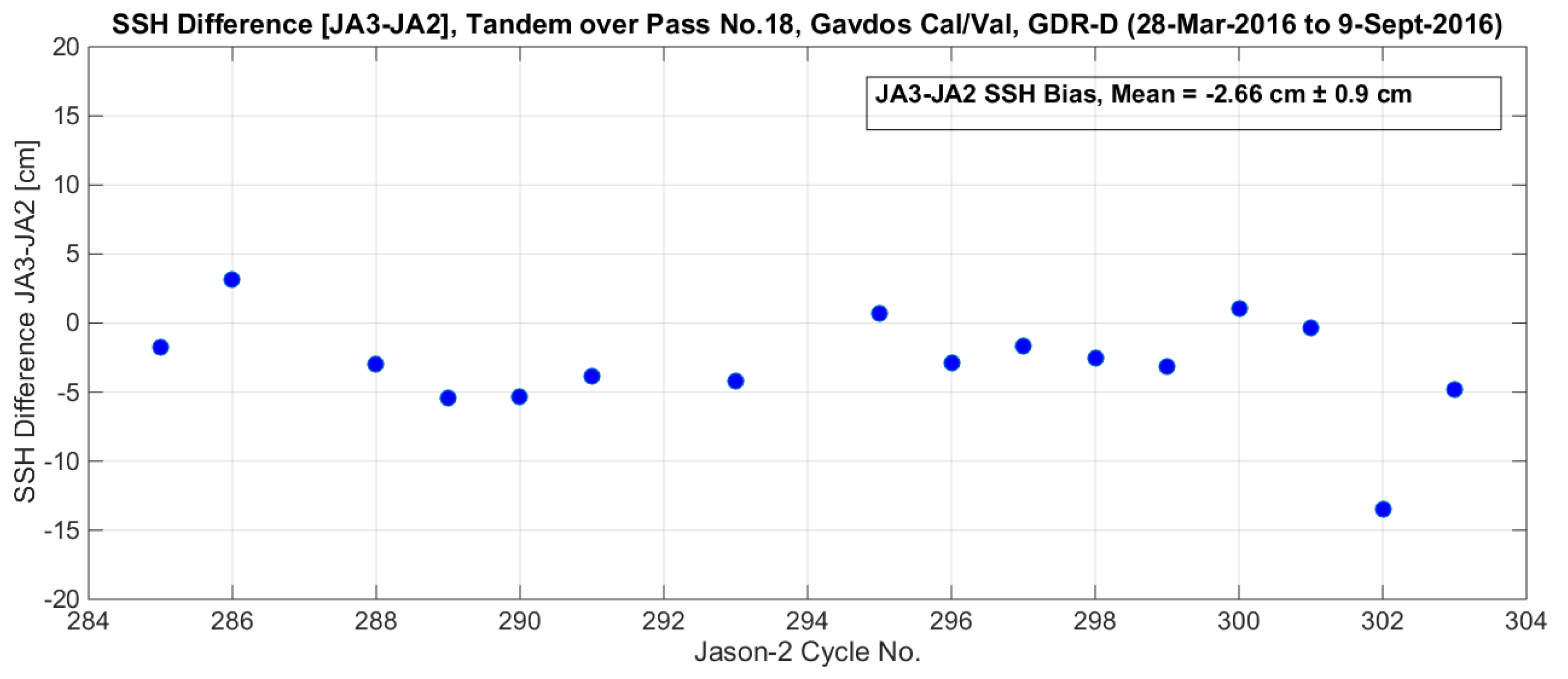
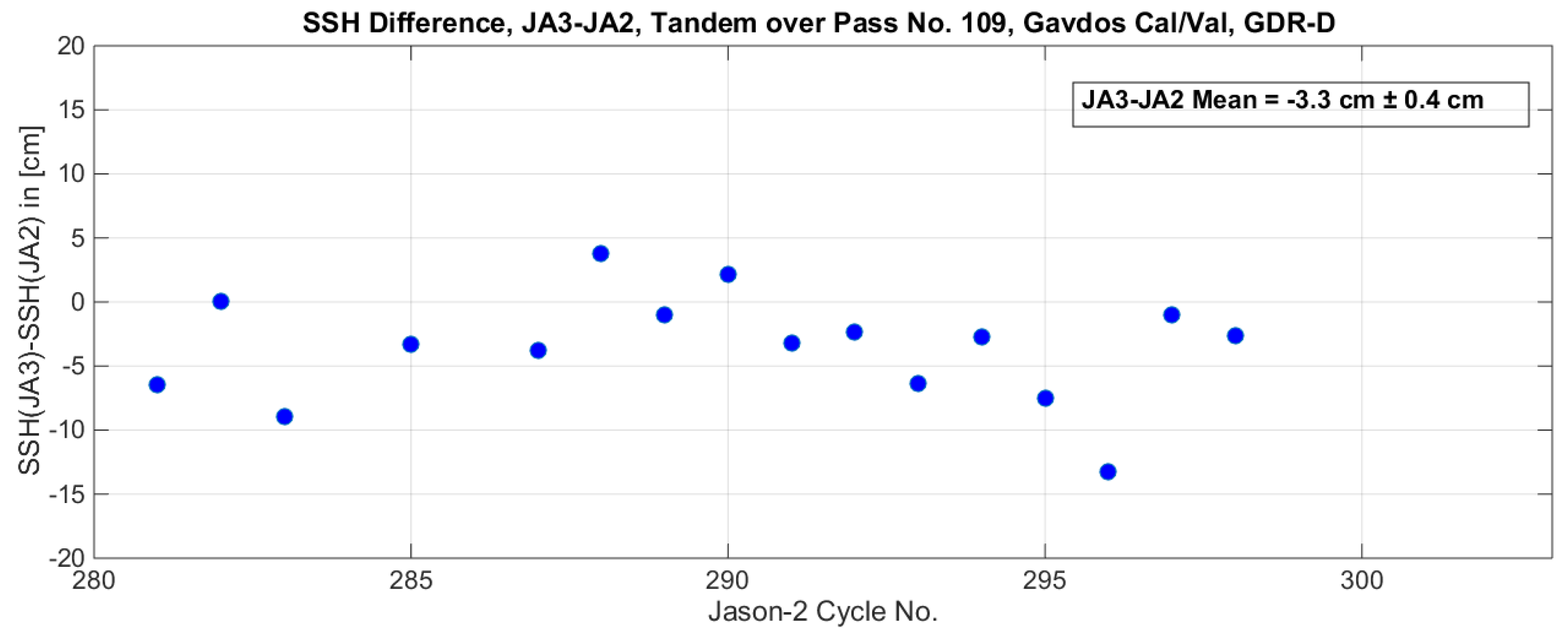
- During the tandem mission, the offset in biases of Jason-3 with respect to Jason-2 for the SSH came to −2.66 cm, while it became +1.77 cm when ranges were directly evaluated with the transponder. The average bias offset of Jason-3 with respect to Jason-2 amounted to +2.21 cm (mean of transponder and SSH);
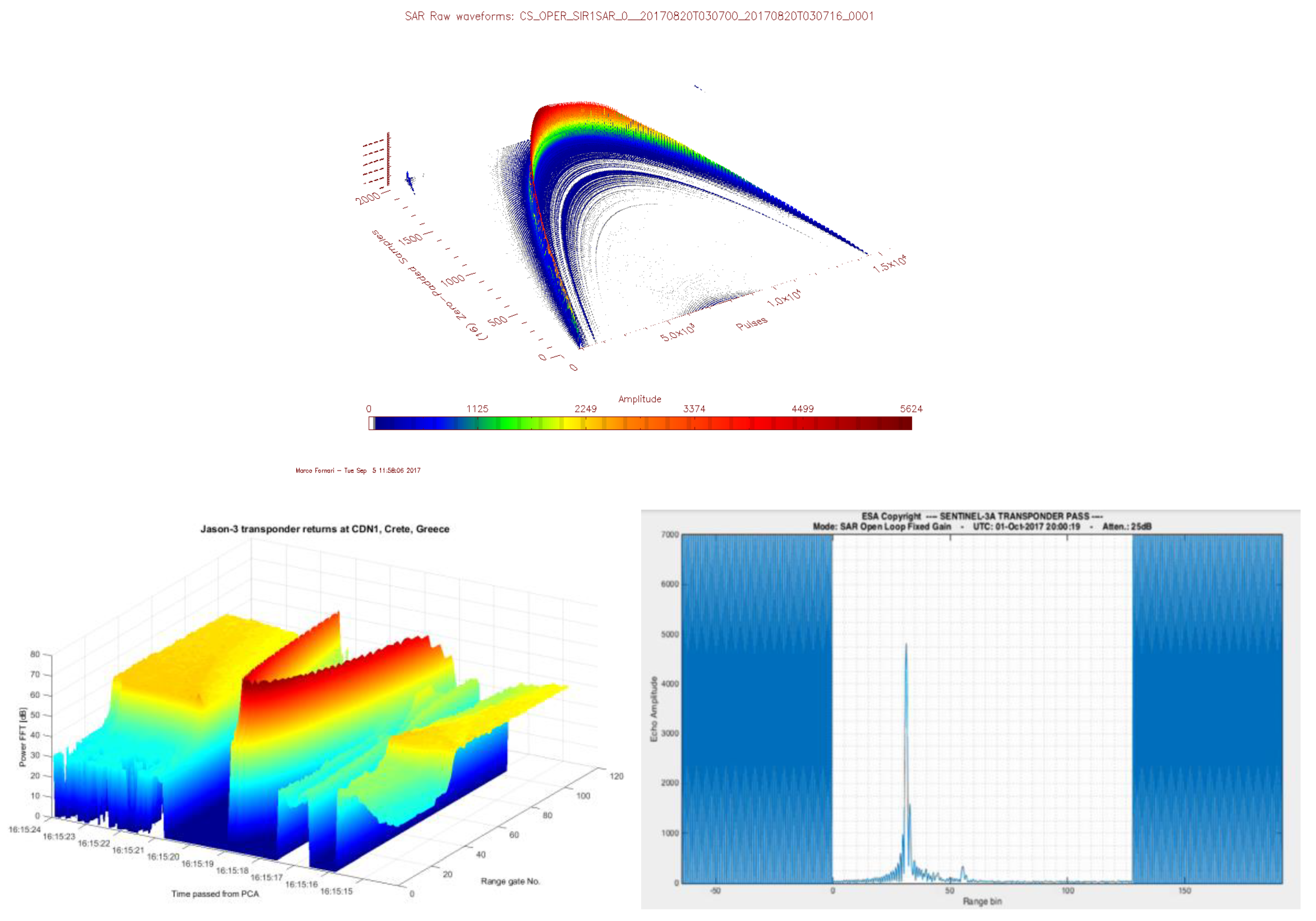
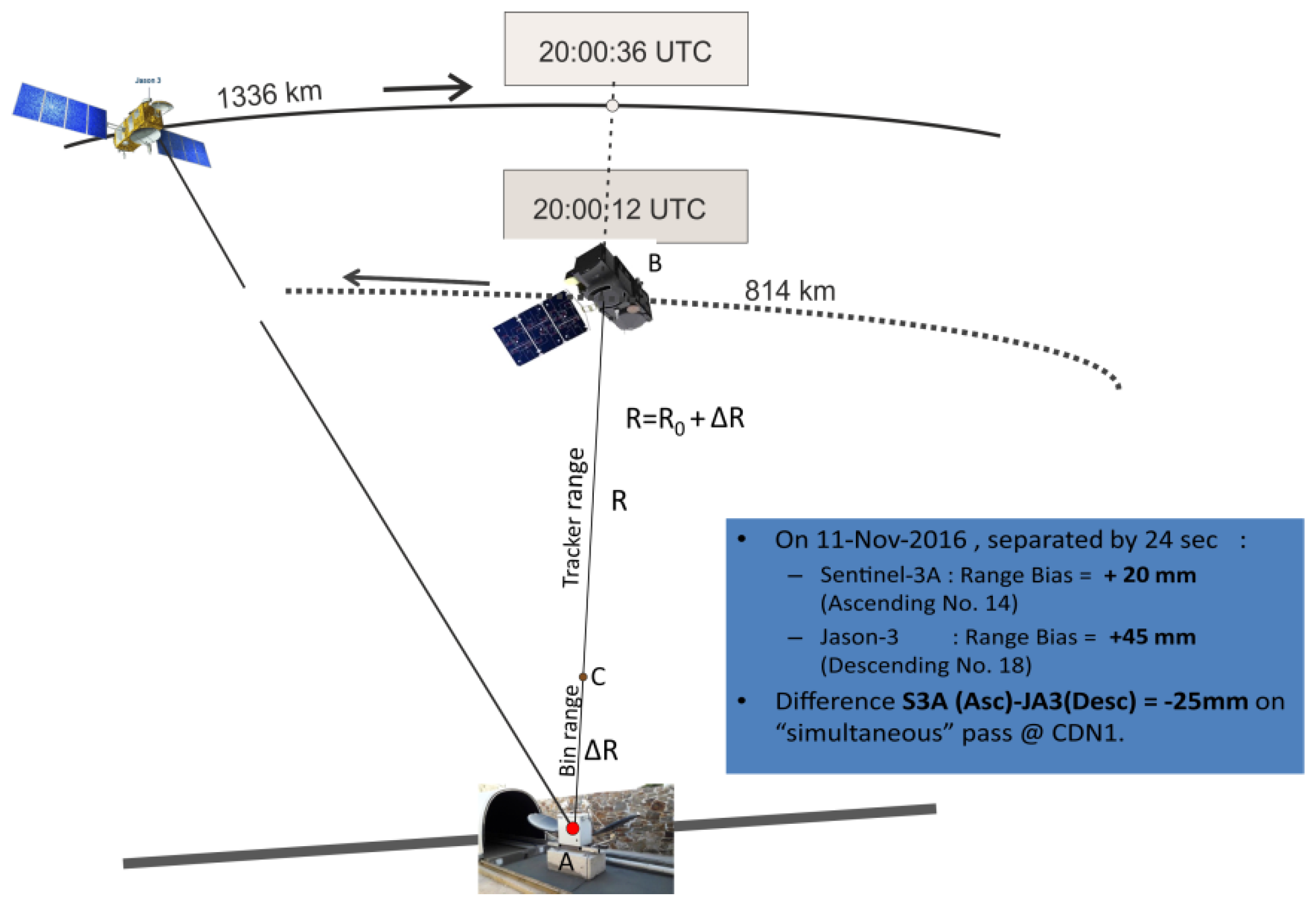
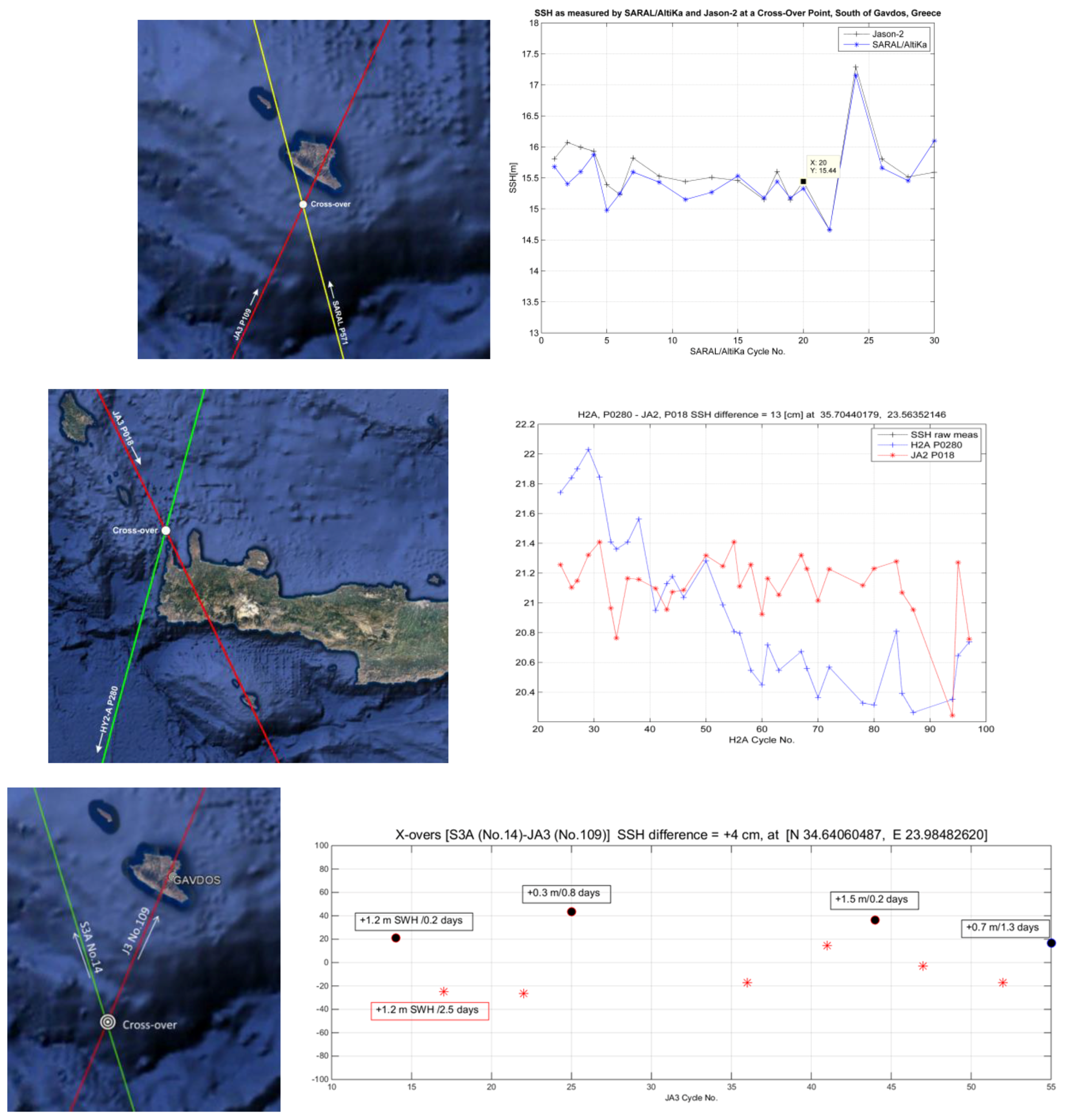
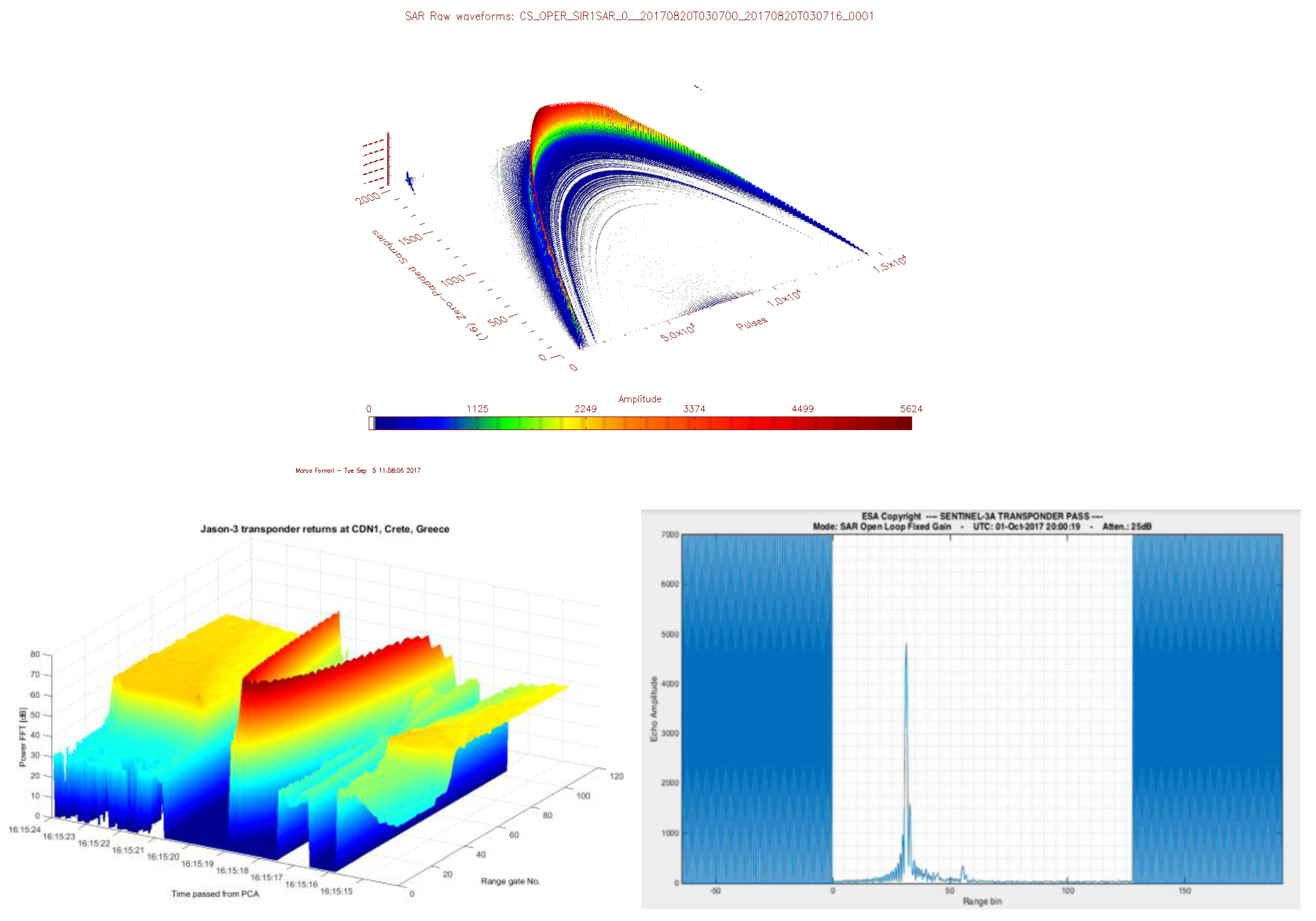
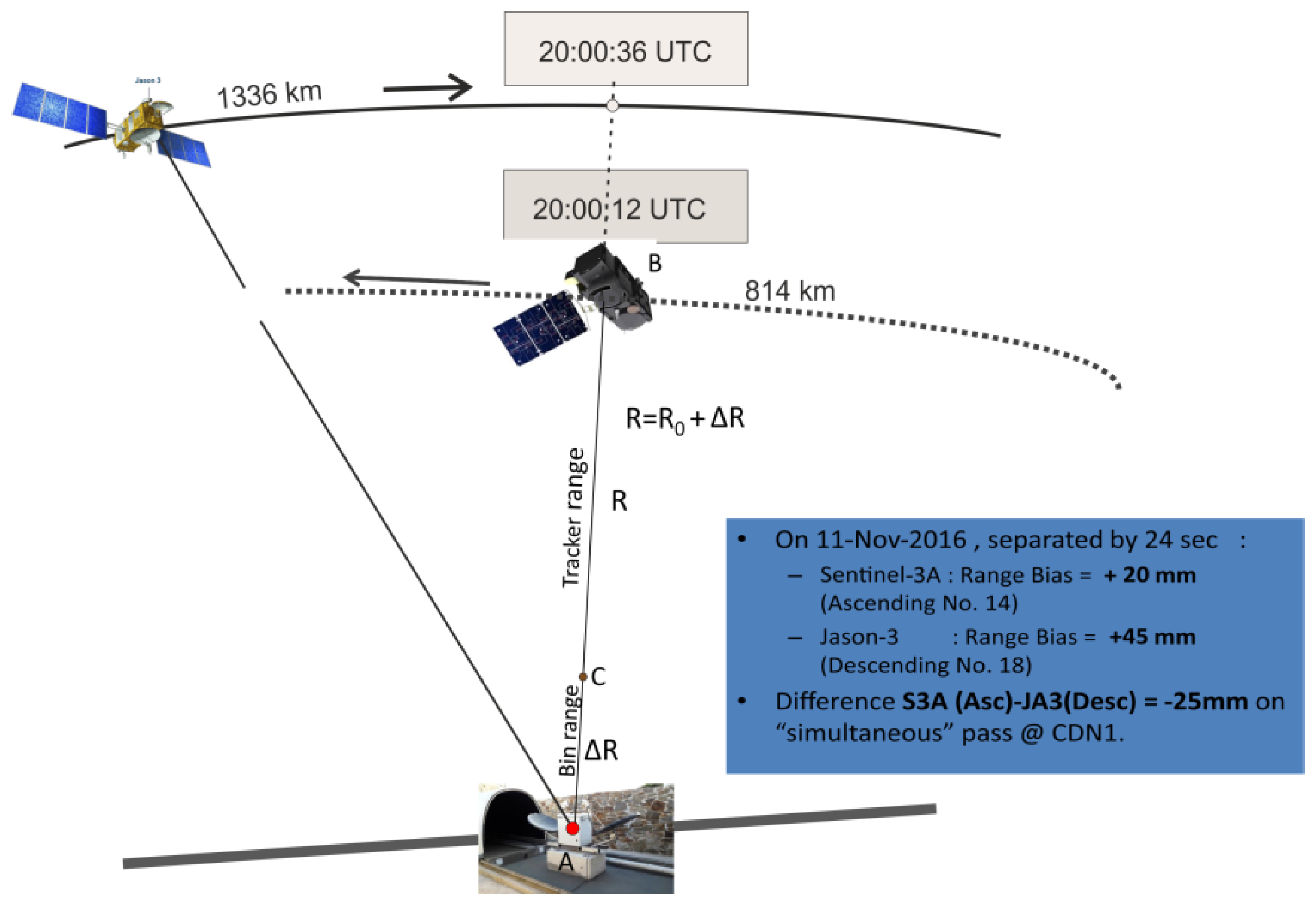
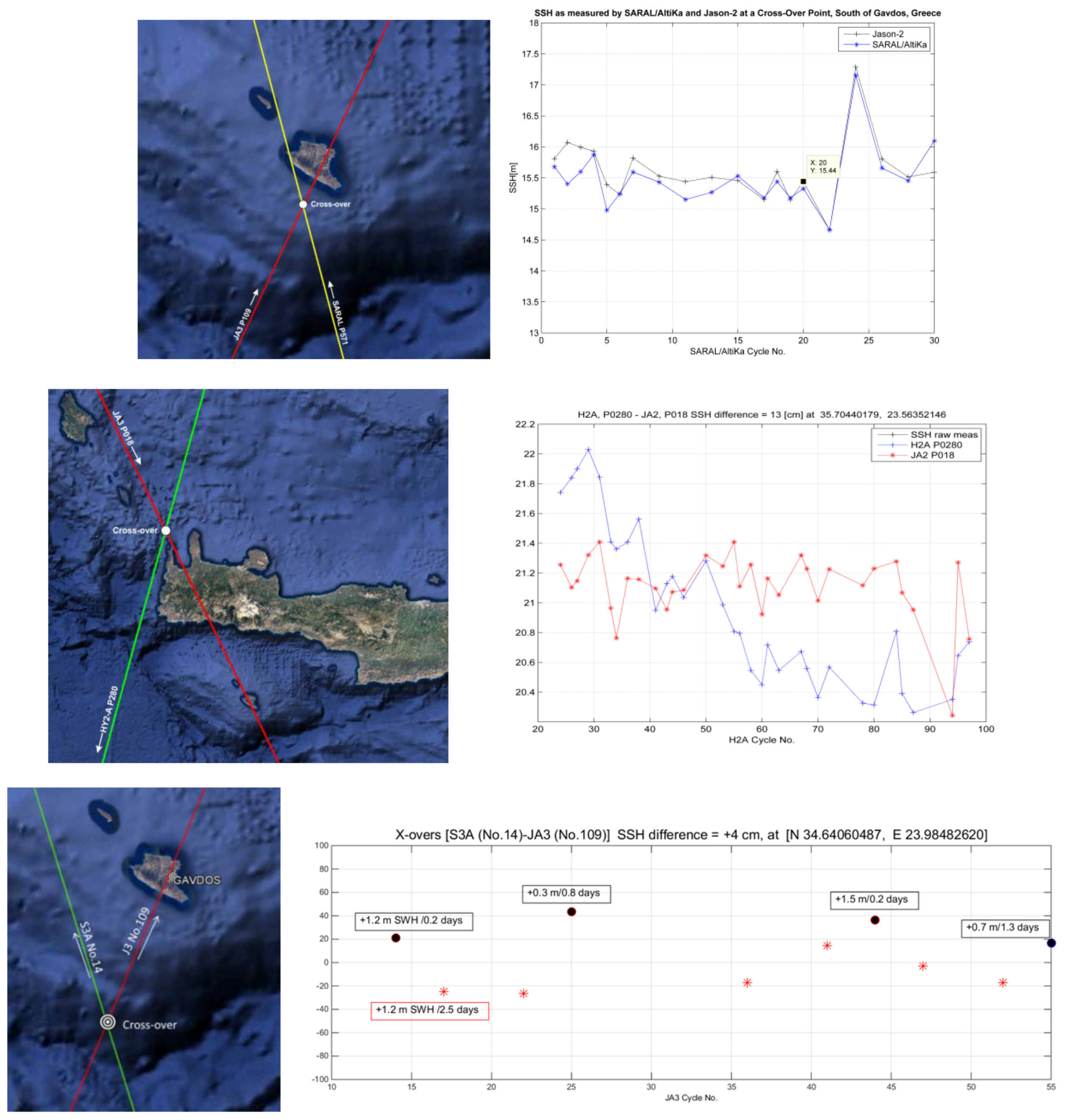
- Sentinel-3A appeared to exhibit a relative offset in sea surface heights of +4 cm with respect to Jason-3 with crossover analysis. This value was also confirmed using a simultaneous transponder pass over the CDN1 Cal/Val site on 11 November 2016, where a range bias of −2.5 cm (i.e., opposite sign when compared to SSH bias) was determined.
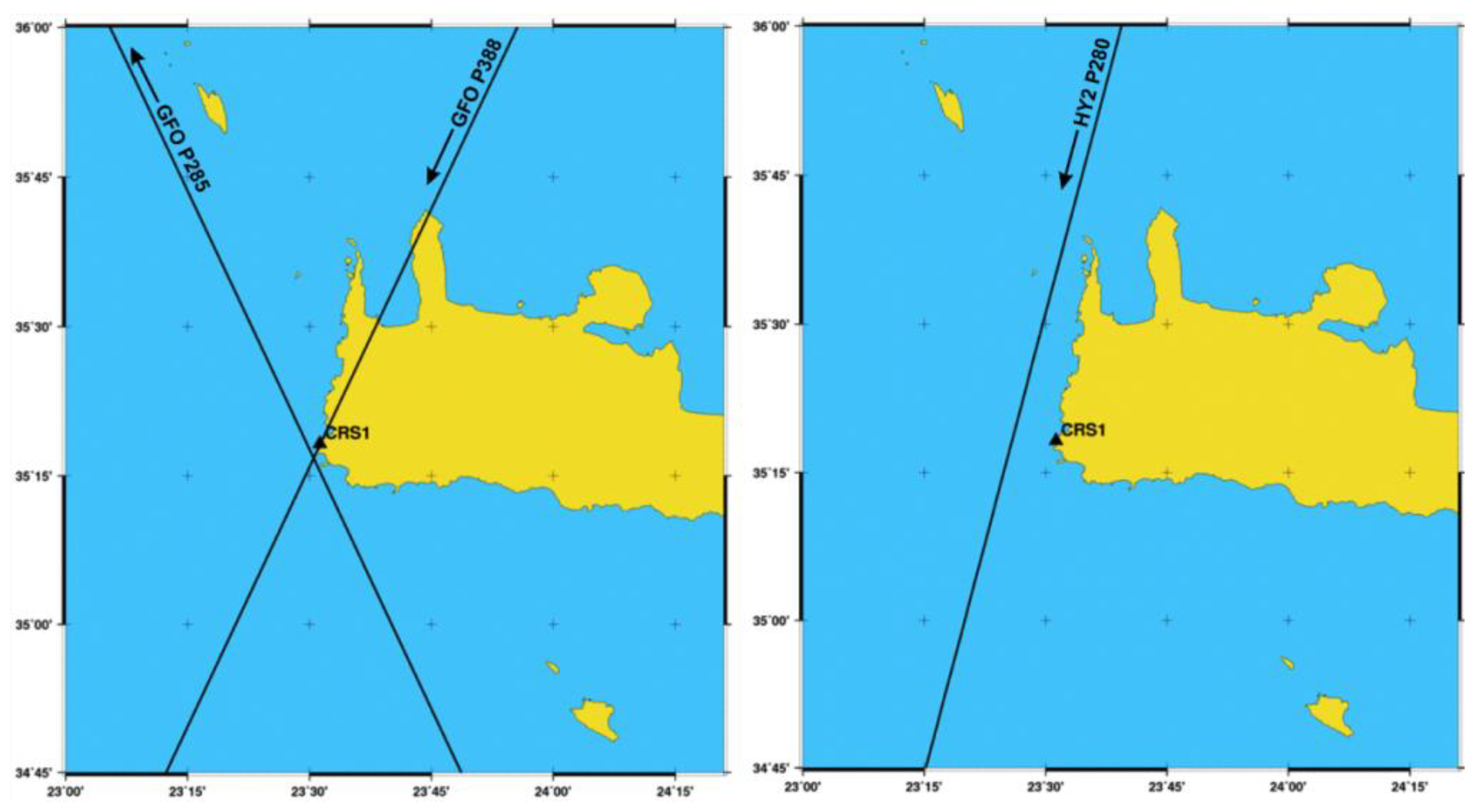
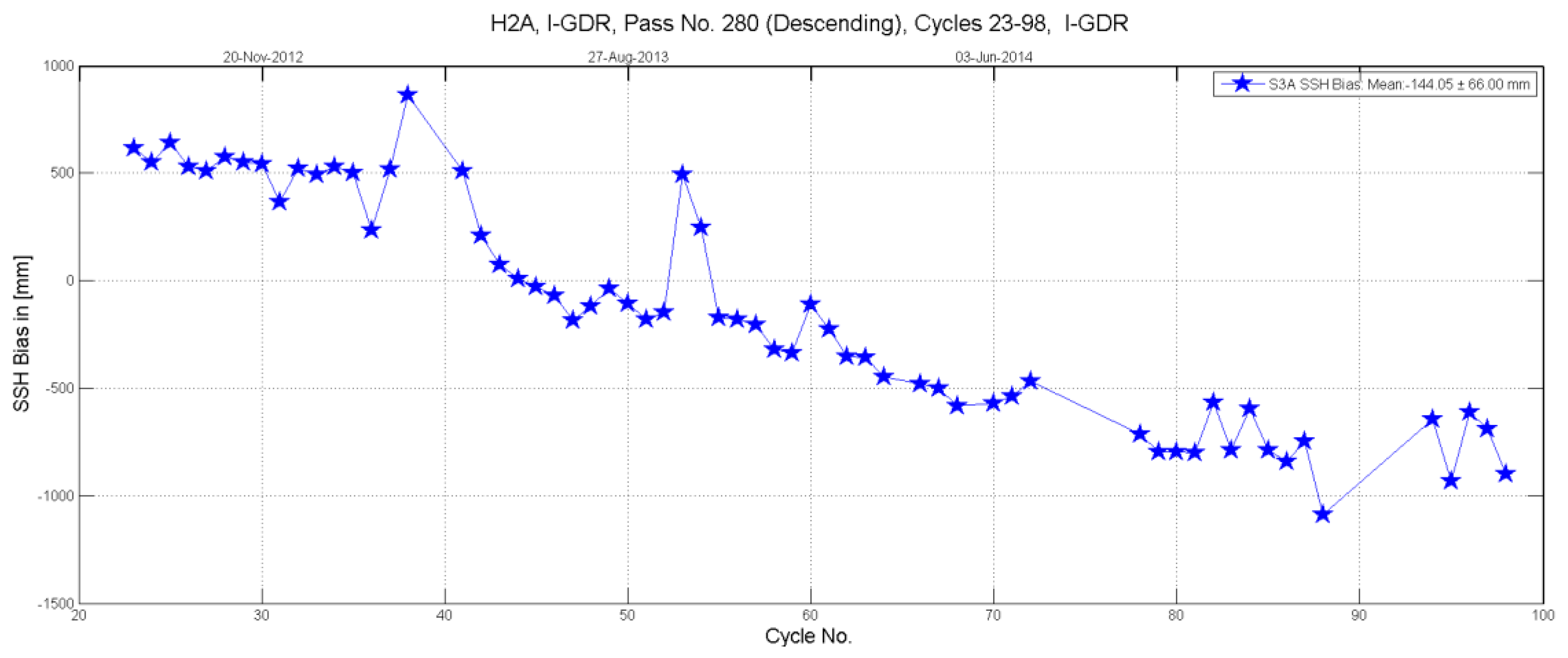
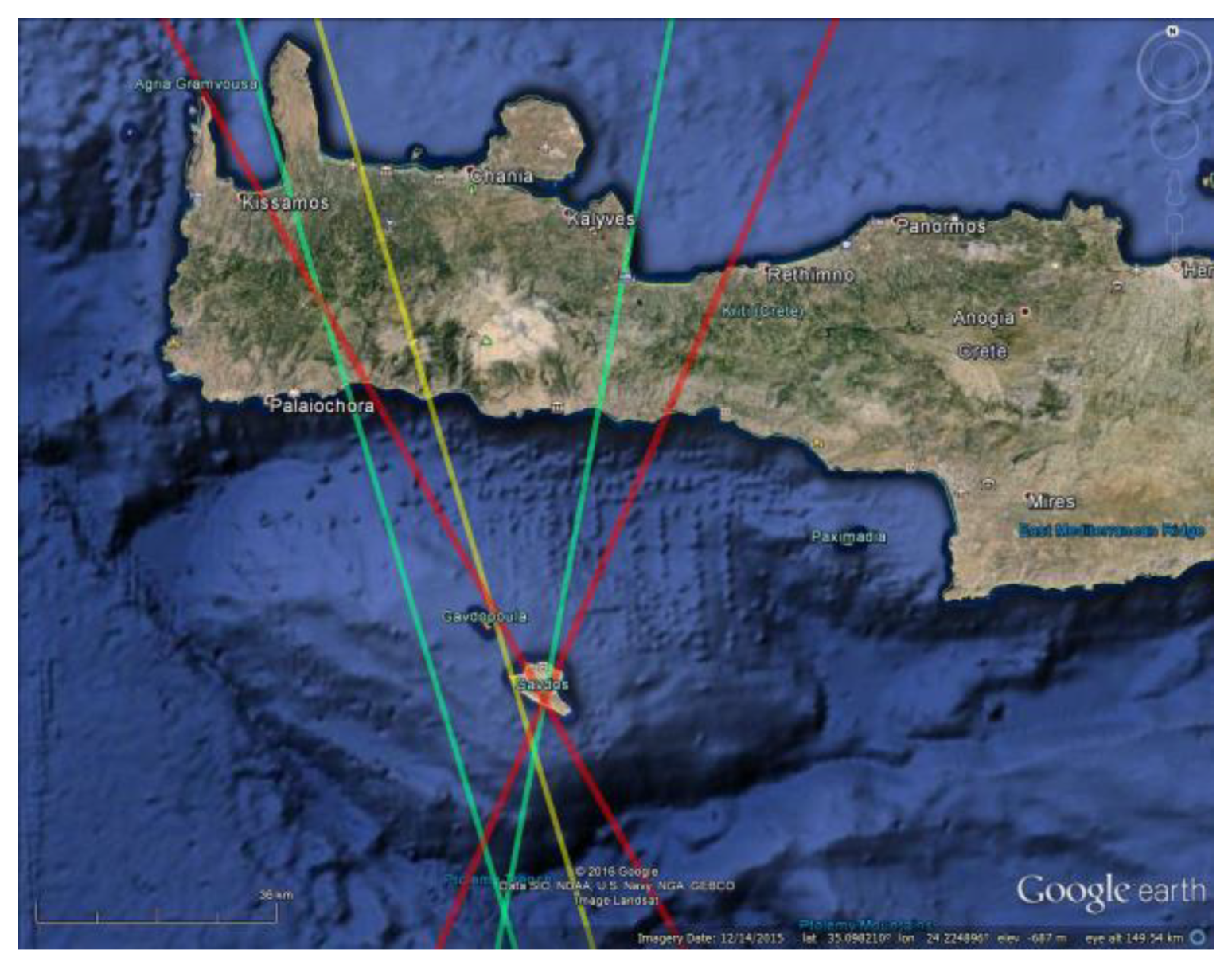
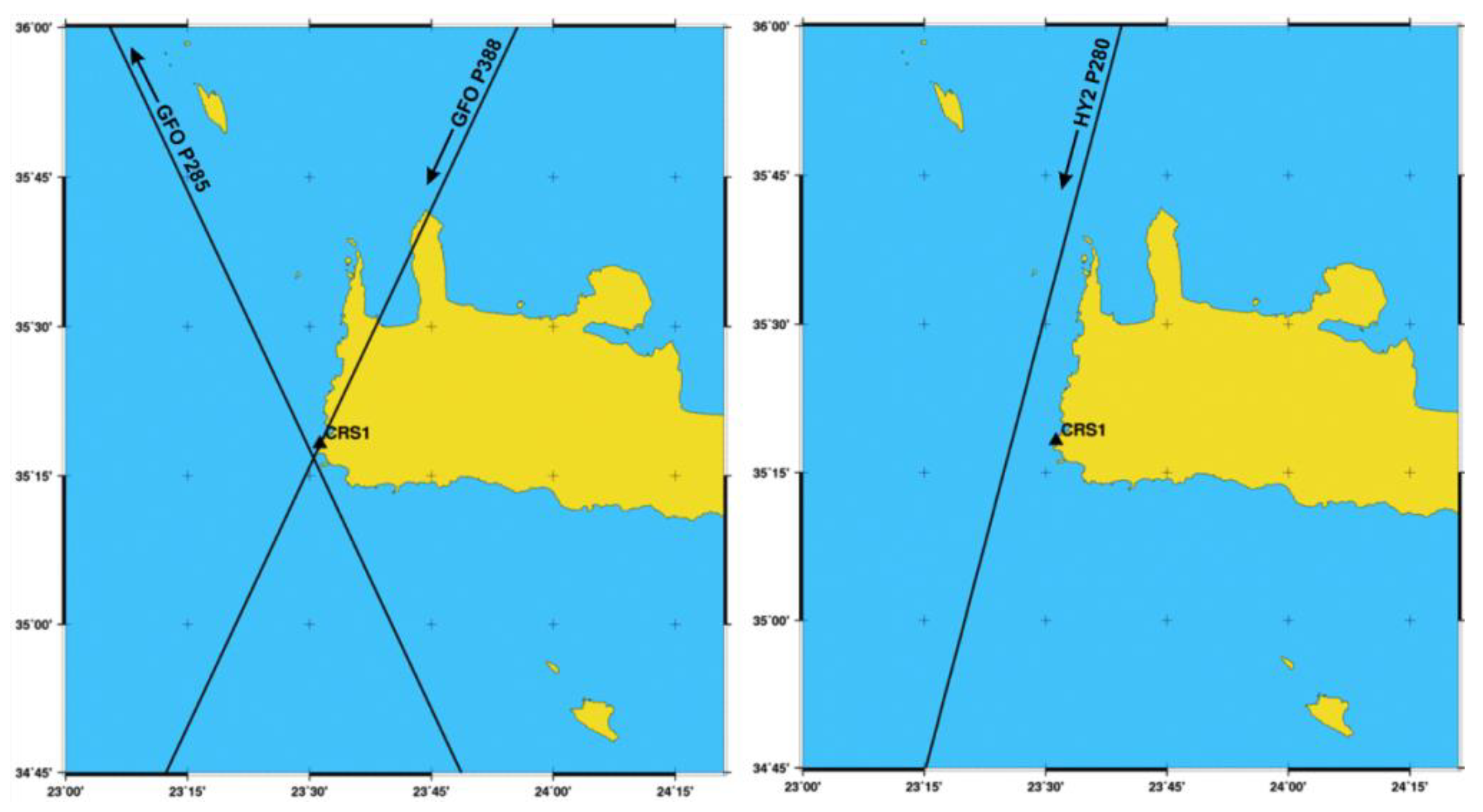
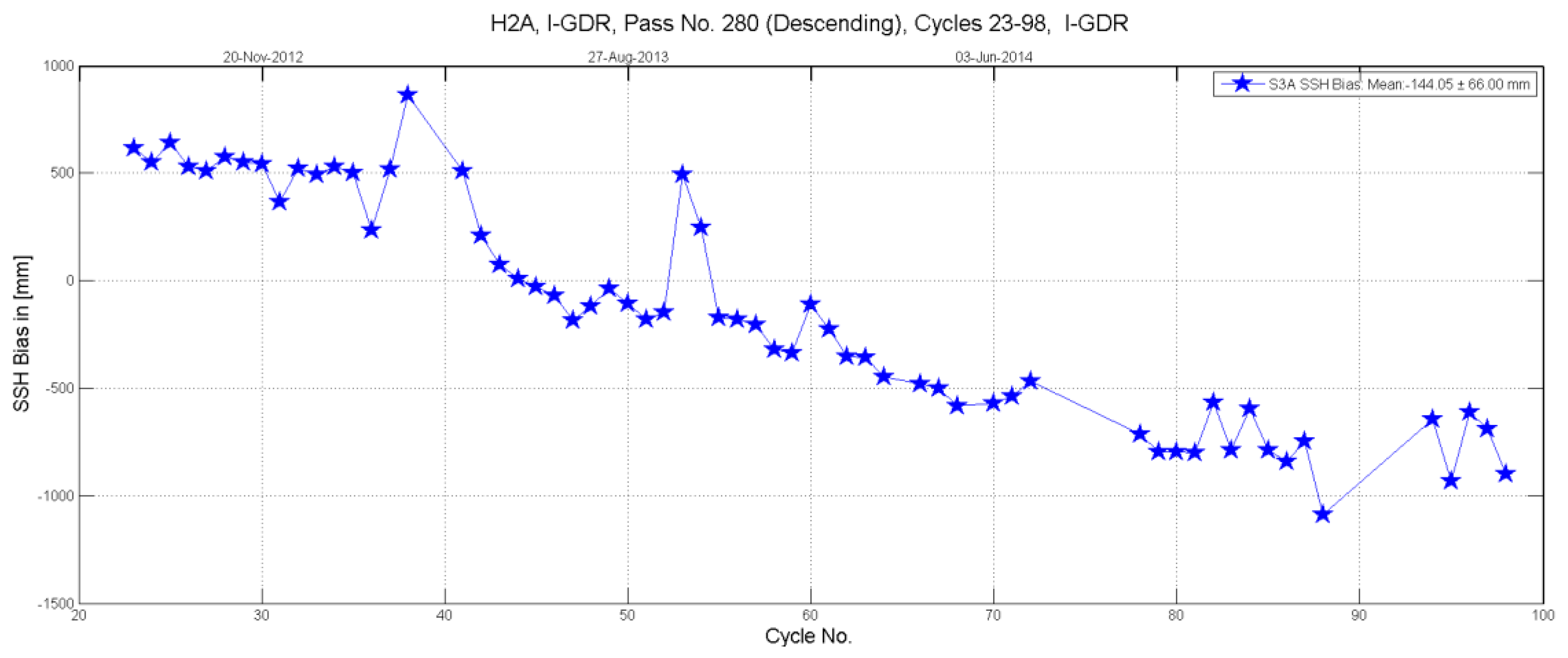
- Relative calibration of HY-2A against Jason-2 with crossover analysis at sea shows that HY-2A displayed a performance that looks like a linear downward trend in bias, starting from +60 cm at Cycle 23 and reaching about −60 cm at Cycle 98. This kind of behavior might be explained by realizing it was generated by a satellite clock defect (oscillation) onboard HY-2A. Comparable bias results for HY-2A have been verified with cross over analysis at sea north of western Crete (Figure 31).
- SARAL/AltiKa displays a bias in sea surface height determination which was larger than that of Jason-2.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Lewis, J.A.; Ladislaw, S.O.; Zheng, D.E. Earth Observation for Climate Change: A Report of the CSIS Technology and Public Policy Program. Center for Strategic and International Studies 2010. Available online: https://goo.gl/xB6OyX (accessed on 25 September 2018).
- Yang, J.; Gong, P.; Fu, R.; Zhang, M.; Chen, J.; Liang, S.; Xu, B.; Shi, J.; Dickinson, R. The role of satellite remote sensing in climate change studies. Nat. Clim. Chang. 2013, 3, 875–883. [Google Scholar] [CrossRef]
- Sandwell, D.T.; Müller, R.D.; Smith, W.H.F.; Garcia, E.; Francis, R. New global marine gravity model from CryoSat-2 and Jason-1 reveals buried tectonic structure. Science 2014, 346, 65–67. [Google Scholar] [CrossRef] [PubMed]
- Smith, W.H.F.; Sandwell, D. Global Sea Floor Topography from Satellite Altimetry and Ship Depth Sounding. Science 1997, 277, 1956–1962. [Google Scholar] [CrossRef]
- Cretaux, J.F.; Kouraev, A.; Berge-Nguyen, M.; Cazenave, A.; Papa, F. Satellite Altimetry for monitoring lake level changes. In Transboundary Water Resources: Strategies for Regional Security and Ecological Stability; NATO Science Series (Series IV: Earth and Environmental Sciences); Vogtmann, H., Dobretsov, N., Eds.; Springer: Dordrecht, The Netherlands, 2005; Volume 46. [Google Scholar]
- Cretaux, J.F.; Calmant, S.; Romanovski, V.; Shibuyin, A.; Lyard, F.; Berge-Nguyen, M.; Cazenave, A.; Hernandez, F.; Perosanz, F. An absolute calibration site for radar altimeters in the continental domain: Lake Issyk-Kul in Central Asia. J. Geod. 2009, 83, 723–735. [Google Scholar] [CrossRef]
- Gornitz, V. Monitoring sea level changes. Clim. Chang. 1995, 31, 515–544. [Google Scholar] [CrossRef]
- IRGC. The Emergence of Risks: Contributing Factors, Emerging Risks: Sea Level Rise; International Risk Governance Council: Lausanne, Switzerland, 2010; ISBN 978-2-9700672-7-6. [Google Scholar]
- Haigh, I.D.; Wahl, T.; Rohling, E.J.; Price, R.M.; Pattiaratchi, C.B.; Calafat, F.M.; Dangendorf, S. Timescale for detecting a significant acceleration in sea level rise. Nat. Commun. 2014, 5, 3635. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bojinski, S.; Verstraete, M.; Peterson, T.C.; Richter, C.; Simmons, A.; Zemp, M. The concept of essential climate variables in support of climate research, applications, and policy. Bull. Am. Meteorol. Soc. 2014, 95, 1431–1443. [Google Scholar] [CrossRef]
- Hollmann, R.; Merchant, C.J.; Saunders, R.; Downy, C.; Buchwitz, M.; Cazenave, A.; Chuvieco, E.; Defourny, P.; de Leeuw, G.; Forsberg, R.; et al. The ESA Climate Change Initiative: Satellite Data records for Essential Climate Variables. Bull. Am. Meteorol. Soc. 2013, 94, 1541–1552. [Google Scholar] [CrossRef]
- Carlowicz, M. Sea Level Rise Hits Home at NASA: Watching Water Rise Right outside the Front Door. Earth Observatory. Available online: https://earthobservatory.nasa.gov/Features/NASASeaLevel (accessed on 25 January 2018).
- Englander, J. Sea Level Rise-Fact & Fiction. TEDX-Boca Raton. Available online: https://www.youtube.com/watch?v=TH8Q8Ki9fCA (accessed on 21 April 2018).
- Le Traon, P.Y. From satellite altimetry to Argo and operational oceanography: Three revolutions in oceanography. Ocean Sci. 2013, 9, 901–915. [Google Scholar] [CrossRef]
- IPCC. Summary for Policymakers. In Climate Change 2013: The Physical Science Basis. Contribution of Working Group I to the Fifth Assessment Report of the Intergovernmental Panel on Climate Change; Stocker, T.F., Qin, D., Plattner, G.-K., Tignor, M., Allen, S.K., Boschung, J., Nauels, A., Xia, Y., Bex, V., Midgley, P.M., Eds.; Cambridge University Press: Cambridge, UK; New York, NY, USA, 2013. [Google Scholar]
- National Academies of Sciences, Engineering and Medicine. Thriving on Our Changing Planet: A Decadal Strategy for Earth Observation from Space; The National Academies Press: Washington, DC, USA, 2018. [Google Scholar]
- Cazenave, A.; Dieng, H.B.; Meyssignac, B.; von Schuckmann, K.; Decharme, B.; Berthier, E. The rate of sea-level rise. Nat. Clim. Chang. Lett. 2014, 4, 358–361. [Google Scholar] [CrossRef]
- Watson, C.; White, N.J.; Church, J.A.; King, M.A.; Burgette, R.J.; Legresy, B. Unabated global mean sea-level rise over the satellite altimeter era. Nat. Clim. Chang. Lett. 2015, 5, 565–568. [Google Scholar] [CrossRef]
- Fu, L.L.; Haines, B.J. The challenges in long-term altimetry calibration for addressing the problem of global sea level change. J. Adv. Space Res. 2012. [Google Scholar] [CrossRef]
- Müller, R. Calibration and verification of remote sensing instruments and observations. Remote Sens. 2014, 6, 5692–5695. [Google Scholar] [CrossRef]
- Bonnefond, P.; Exertier, P.; Laurain, O.; Jan, G. Absolute calibration of Jason-1 and Jason-2 altimeters in Corsica during formation flight phase. Mar. Geod. 2010, 33 (Suppl. S1), 80–90. [Google Scholar] [CrossRef]
- Haines, B.J.; Desai, S.; Born, G. The Harvest Experiment: Calibration of the climate data record from TOPEX/Poseidon, Jason-1 and the Ocean Surface Topography Mission. Mar. Geod 2010, 33 (Suppl. S1), 91–113. [Google Scholar] [CrossRef]
- Watson, C.; White, N.; Church, J.; Burgette, R.; Tregoning, P.; Coleman, R. Absolute calibration in Bass Strait, Australia: TOPEX, Jason-1 and OSTM/Jason-2. Mar. Geod. 2011, 34, 242–260. [Google Scholar] [CrossRef]
- Mertikas, S.P.; Ioannides, R.T.; Tziavos, I.N.; Vergos, G.S.; Hausleitner, W.; Frantzis, X.; Tripolitsiotis, A.; Partsinevelos, P.; Andrikopoulos, D. Statistical models and latest results in the determination of the absolute bias for the radar altimeters of Jason satellites using the Gavdos facility. Mar. Geod. 2010, 33 (Suppl. S1), 114–149. [Google Scholar] [CrossRef]
- Cancet, M. Regional In Situ Cal/Val of Satellite Altimeter Range at Non-Dedicates Sites. In 2017 Ocean Surface Topography Science Team. Available online: https://goo.gl/w2tUeA (accessed on 25 September 2018).
- Calmant, S. Evaluation of the Sentinel-3A Water Levels over Large Hydrological Basins. In 2017 Ocean Surface Topography Science Team. Available online: https://goo.gl/ThTLNQ (accessed on 25 September 2018).
- Babu, K.N.; Shukla, A.K.; Suchandra, A.B.; Arun-Kumar, S.V.V.; Bonnefond, P.; Testut, L.; Mehra, P.; Laurain, O. Absolute calibration of SARAL/AltiKa in Kavaratti During its initial calibration-validation phase. Mar. Geod. 2015, 38, 156–170. [Google Scholar] [CrossRef]
- Martinez-Benjamin, J.J. Contribution of Ibiza, Estarit and Barcelona Harbours Sites for Altimeter Calibrations. In 2017 Ocean Surface Topography Science Team. Available online: https://goo.gl/2TneV5 (accessed on 25 September 2018).
- Peng, H.; Mu, B.; Lin, M.; Zhou, W. HY-2A satellite calibration and validation approach and results. In Proceedings of the IEEE Geoscience and Remote Sensing Symposium, Quebec City, QC, Canada, 13–18 July 2014. [Google Scholar]
- Mertikas, S.P.; Pavlis, E.C.; Drakopoulos, P. GAVDOS: A satellite radar altimeter calibration and sea-level monitoring site on the island of Gavdos, Crete. In Building the European Capacity in Operational Oceanography, Proceedings of the Third EuroGOOS Conference; Elsevier Oceanography Series 69; Dahlin, H., Flemming, N.C., Nittis, K., Petersson, S.E., Eds.; Elsevier: Amsterdam, The Netherlands, 2003; pp. 258–264. [Google Scholar]
- Mertikas, S.P.; Zhou, X.; Qiao, F.; Daskalakis, A.; Lin, M.; Peng, H.; Tziavos, I.N.; Vergos, G.; Tripolitsiotis, A.; Frantzis, X. First preliminary results for the absolute calibration of the Chinese HY-2 altimetric mission using the CRS1 calibration facilities in West Crete, Greece. Adv. Space Res. 2015, 57, 78–95. [Google Scholar] [CrossRef]
- Velaoras, D.; Krokos, G.; Nittis, K.; Theocharis, A. Dense intermediate water outflow from the Cretan Sea: A salinity driven, recurrent phenomenon, connected to thermohaline circulation changes. J. Geophys. Res. Oceans 2014, 119, 4797–4820. [Google Scholar] [CrossRef] [Green Version]
- Mertikas, S.P.; Tripolitsiotis, A.; Mavrocordatos, C.; Picot, N.; Féménias, P.; Daskalakis, A.; Boy, F. A permanent infrastructure in Crete for the calibration of Sentinel-3, Cryosat-2 and Jason missions with a transponder. In Proceedings of the ESA Living Planet Symposium, Edimburgh, UK, 9–13 September 2013. [Google Scholar]
- Tserolas, V.; Mertikas, S.P.; Frantzis, X. The Western Crete geodetic infrastructure: Long-range power-law correlations in GPS time series using Detrended Fluctuation Analysis. Adv. Space Res. 2013, 51, 1448–1467. [Google Scholar] [CrossRef]
- Herring, T.A.; King, R.W.; McClusky, S.C. GAMIT Reference Manual: GPS Analysis at MIT, Release 10.4.; Massachusetts Institute of Technology: Cambridge, MA, USA, 2010. [Google Scholar]
- Dash, R.; Andritsch, F.; Arnold, D.; Bertone, S.; Fridez, P.; Jäggi, A.; Jean, Y.; Maier, A.; Mervart, L.; Meyer, U.; et al. Bernese GNSS Software, Version 5.2.; University of Bern, Bern Open Publishing: Bern, Switzerland, 2015. [Google Scholar]
- Desai, S.; Kuang, D.; Bertiger, W. GIPSY/OASIS (GIPSY) Overview and under the Hood. California Institute of Technology. Available online: ftp://ehzftp.wr.usgs.gov/svarc/GIPSY_pdfs/GIPSY_Overview.pdf (accessed on 27 June 2016).
- Willis, P.; Mertikas, S.P.; Argus, D.F.; Bock, O. DORIS and GPS monitoring of the Gavdos calibration site. Adv. Space Res. 2013, 51, 1438–1447. [Google Scholar] [CrossRef]
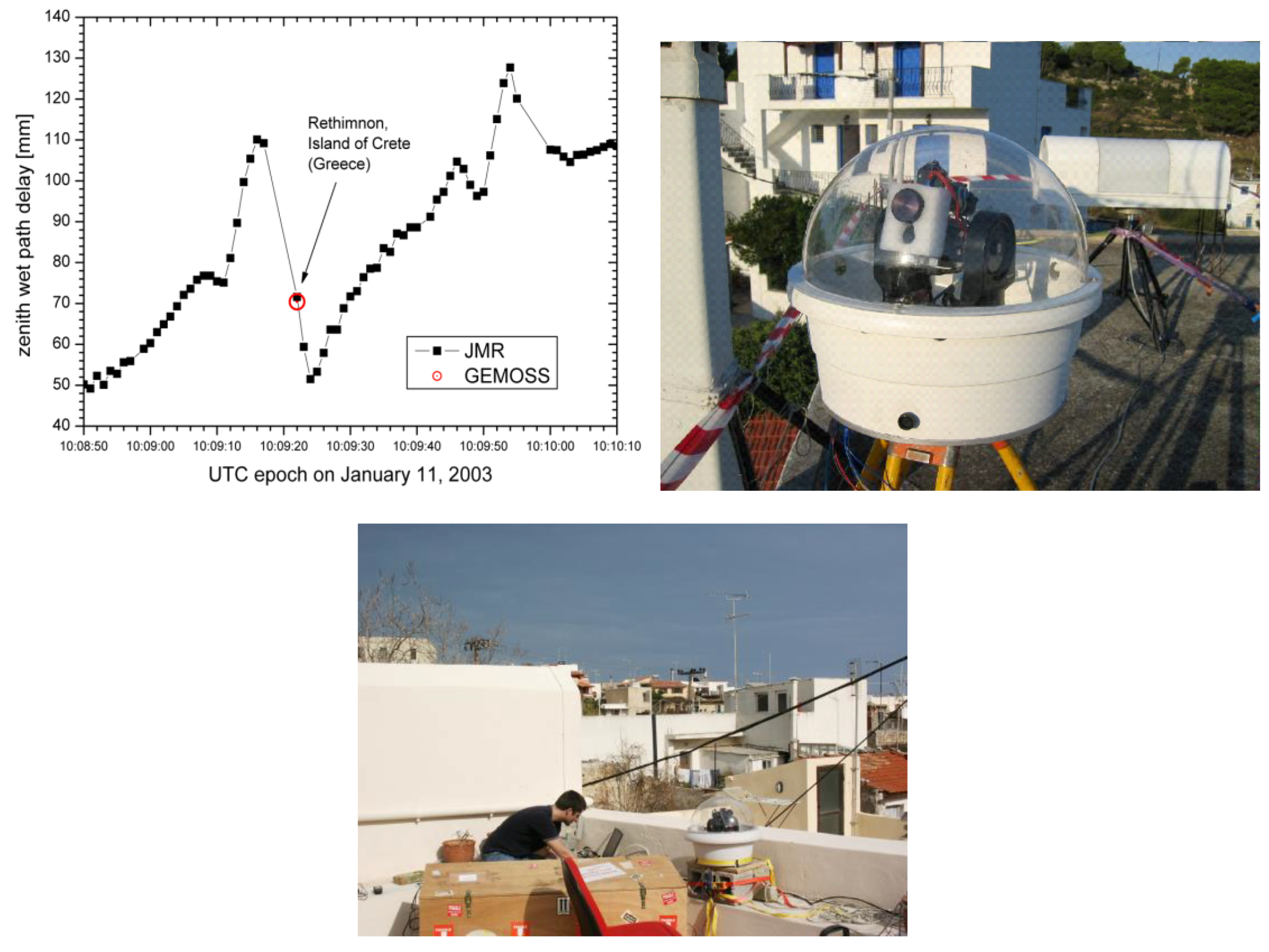
- Somieski, A.; Burki, B.; Geiger, A.; Kahle, H.G.; Pavlis, E.C.; Becker-Ross, H.; Florek, S.; Okruss, M. Geodetic Mobile Solar Spectrometer (GEMOSS): Comparison with the microwave radiometer of the altimeter satellite Jason (JMR). Geophys. Res. Abstr. 2005, 7, 02746. [Google Scholar] [CrossRef]
- Mertikas, S.P.; Daskalakis, A.; Tziavos, I.N.; Andersen, O.B.; Vergos, G.; Tripolitsiotis, A.; Zervakis, V.; Frantzis, X.; Partsinevelos, P. Altimetry, bathymetry and geoid variations at the Gavdos permanent Cal/Val facility. Adv. Space Res. 2012, 51, 1418–1437. [Google Scholar] [CrossRef]
- Mertikas, S.P.; Donlon, C.; Mavrocordatos, C.; Tziavos, I.N.; Galanakis, D.; Vergos, G.; Andersen, O.B.; Tripolitsiotis, A.; Frantzis, X. Gavdos/West Crete Cal-Val site: Over a decade calibration for Jason series, SARAL/AltiKa, Cryosat-2, Sentinel-3 and HY-2 altimeter satellites. In Proceedings of the ESA Living Planet Symposium Prague, Czech Republic, 9–13 May 2016. [Google Scholar]
- Cocard, M.; Banks, A.C.; Damianidis, K.; Drakopoulos, P.; Exertier, P.; Forsberg, R.; Forsberg, R.; Frantzis, X.; Gidskehaug, A.; Koutroulis, E.; et al. Airborne laser and gravity project for the altimeter calibration site Gavdos. In 27th European Geophysical Society General Assembly. 2002. Available online: http://adsabs.harvard.edu/abs/2002EGSGA..27.6236C (accessed on 25 September 2018).
- Olesen, A.V.; Tziavos, I.N.; Forsberg, R. New airborne gravity data around Crete—First results from CAATER campaign. In Proceedings of the 3rd Meeting of the International Gravity and Geoid Commission, Thessaloniki, Greece, 26–30 August 2002; Tziavos, I.N., Ed.; Available online: https://goo.gl/Cnjap8 (accessed on 25 September 2018).
- Vergos, G.S.; Tziavos, I.N.; Andritsanos, V.D. Gravity database generation and geoid model estimation using heterogeneous data. In Gravity Geoid and Space Missions; Jekeli, C., Bastos, L., Fernandes, J., Eds.; IAG Symp. 129; Springer: Berlin/Heidelberg, Germany, 2005; pp. 155–160. [Google Scholar]
- Pavlis, E.C.; Mertikas, S.P. The GAVDOS mean sea level and altimeter calibration facility: Results for Jason-1. Mar. Geod. 2004, 27, 631–655. [Google Scholar] [CrossRef]
- Mertikas, S.P.; Daskalakis, A.; Tziavos, I.N.; Vergos, G.S.; Frantzis, X.; Tripolitsiotis, A.; Partsinevelos, P.; Andrikopoulos, D.; Zervakis, V. Ascending and Descending Passes for the Determination of the Altimeter Bias of Jason Satellites using the Gavdos Facility. Mar. Geod. 2001, 34, 2011. [Google Scholar] [CrossRef]
- OSTST. Report of the Ocean Surface Topography Science Team Meeting, Boulder, CO, USA, 8–11 October 2013; Willis, J., Bonnefond, P., Eds. Available online: http://www.aviso.altimetry.fr/fileadmin/documents/OSTST/2013/oral/OSTST_2013_Meeting_Report.pdf (accessed on 25 September 2018).
- OSTST. Report of the Ocean Surface Topography Science Team Meeting, Lake Constance, Germany, 28–31 October 2014; Bonnefond, P., Willis, J., Eds. Available online: http://www.aviso.altimetry.fr/fileadmin/documents/OSTST/2014/OSTST_2014_Meeting_Report.pdf (accessed on 25 September 2018).
- OSTST. Report of the Ocean Surface Topography Science Team Meeting, Reston, VA, USA, 19–23 October 2015; Bonnefond, P., Willis, J., Eds. Available online: http://www.aviso.altimetry.fr/fileadmin/documents/OSTST/OSTST_2015_Meeting_Report.pdf (accessed on 25 September 2018).
- Donlon, C. Fiducial Reference Measurements for Altimetry. FRM4ALT Project Web Portal. Available online: https://goo.gl/Yn23pQ (accessed on 26 June 2018).
- Mertikas, S.P.; Donlon, C.; Femenias, P.; Cullen, R.; Galanakis, D.; Frantzis, X.; Tripolitsiotis, A. Fiducial Reference Measurements for Satellite Altimetry Calibration: The Constituents. In International Altimetry Cal/Val Review & Applications; International Association of Geodesy Symposia; Springer: Basel, Switzerland, 2018; under review. [Google Scholar]
- Mertikas, S.P.; Donlon, C.; Femenias, P.; Mavrocordatos, C.; Galanakis, D.; Guinle, T.; Boy, F.; Tripolitsiotis, A.; Frantzis, X.; Tziavos, I.N.; et al. Fiducial Reference Measurements for Satellite Altimetry Calibration: The Constituents. In International Altimetry Cal/Val Review & Applications; International Association of Geodesy Symposia; Springer: Basel, Switzerland, 2018; under review. [Google Scholar]
- Mertikas, S.P.; Daskalakis, A.; Tziavos, I.N.; Vergos, G.; Frantzis, X.; Tripolitsiotis, A. First calibration results for the SARAL/AltiKa altimetric mission using the Gavdos permanent facilities. Mar. Geod. 2015, 38, 249–259. [Google Scholar] [CrossRef]
- Pires, N.; Fernades, J.F.; Gommenginger, C.; Scharroo, R. A conceptually simple modeling approach for Jason-1 sea state bias correction based on 3 parameter exclusively derived from altimetric information. Remote Sens. 2016, 8, 576. [Google Scholar] [CrossRef]
- Denys, P.; Birks, A.; Cross, P.; Powell, J.; Bürki, B. Transponder altimetry: Precise height measurements over land. J. Geophys. Res. 1995, 100, 24347–24359. [Google Scholar] [CrossRef]
- Birks, A.R. Radar Altimeter Calibration Using Ground Based Transponders. In Proceedings of the Envisat Symposium, ESA SP-636, Montreux, Switzerland, 23–27 April 2007; pp. 23–27. [Google Scholar]
- Powell, R.J. Relative vertical positioning using ground-level transponders with the ERS-1 altimeter. IEEE Trans. Geosci. Remote Sens. 1986, 24. [Google Scholar] [CrossRef]
- Pesec, P.; Sunkel, H.; Fachbach, N. Transponders for Altimeter Calibration and Height Transfer. VGI Osterreichische Zeitschrift für Vermessung und Geoinformation 1996, 84, 252–256. [Google Scholar]
- Cristea, E.; Moore, P. Altimeter bias determination using two years of transponder observations. In Proceedings of the Envisat Symposium, ESA SP-636, Montreux, Switzerland, 23–27 April 2007; Lacoste, H., Ouwehand, L., Eds.; ESA Publications Division, European Space Agency: Noordwijk, The Netherlands, 2007. [Google Scholar]
- Hausleitner, W.; Moser, F.; Desjonqueres, J.D.; Boy, F.; Picot, N.; Weingrill, J.; Mertikas, S.; Daskalakis, A. A New Method of Precise Jason-2 Altimeter Calibration Using a Microwave Transponder. Mar. Geod. 2012, 35, 337–362. [Google Scholar] [CrossRef]
- OSTST. Report of the Ocean Surface Topography Science Team Meeting, Miami, FL, USA, 23–27 October 2017; Willis, J., Bonnefond, P., Leulitte, E., Scharroo, R., Donlon, C., Eds. Available online: https://goo.gl/6yQr9t (accessed on 25 January 2018).
- BIPM. International Vocabulary of Metrology-Basic and General Concepts and Associated Terms (VIM), 3rd ed.; Bureau International des Poids et Mesures: Sevres, France, 2012. [Google Scholar]
- Mertikas, S.P.; Donlon, C.; Cullen, R.; Tripolitsiotis, A. Scientific and Operational Roadmap for Fiducial Reference Measurements in Satellite Altimetry Calibration and Validation. In International Altimetry Cal/Val Review & Applications; International Association of Geodesy Symposia; Springer: Basel, Switzerland, 2018; under review. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Altimetric Mission | Specifications for Sea-Surface Height | Actual SSH | Specifications for Altimeter | Actual Altimeter Noise |
|---|---|---|---|---|
| Jason-2 and Jason-3 | ±3.4 cm | ±2.5 cm | ±1.7 cm | ±1.5 cm |
| SARAL/AltiKa | ±3.2 cm | ±3.2 cm | ±1.5 cm | ±1.0 cm |
| HY-2A | ±10 cm | ±5.0 cm | ±4 cm | ±2 cm |
| Sentinel-3A | ±2.94 cm | ±3.0–5.0 cm | ±1.3 cm | ±3.0 cm |
| Site | Latitude (Deg) | Longitude (Deg) | Ell.Height (m) | σ(lat) (mm) | σ(lon) (mm) | σ(h) (mm) | Time Span (Years) |
|---|---|---|---|---|---|---|---|
| CDN0 | N 35 20 16.024403 | E 23 46 46.854649 | 1049.5183 | 1.9 | 2.5 | 7.6 | 2014.49–2018.44 |
| CDN2 | N 35 20 16.291142 | E 23 46 46.829187 | 1050.4080 | 1.7 | 1.9 | 8.0 | 2016.40–2018.44 |
| CRS1 | N 35 18 12.649002 | E 23 31 17.263955 | 21.2075 | 2.0 | 1.8 | 5.4 | 2008.18–2018.44 |
| GVD0 | N 34 50 18.578282 | E 24 6 31.908077 | 123.8719 | 2.2 | 1.6 | 5.6 | 2003.04–2017.35 |
| GVD7 | N 34 50 52.744567 | E 24 7 11.205655 | 20.1685 | 1.5 | 1.8 | 5.8 | 2009.37–2018.44 |
| GVD8 | N 34 50 52.612206 | E 24 7 11.399223 | 22.2757 | 1.6 | 1.9 | 6.2 | 2010.50–2018.44 |
| IMS1 | N 35 22 12.547506 | E 24 28 20.982681 | 35.9138 | 1.8 | 1.6 | 5.0 | 2010.19–2015.19 |
| MEN2 | N 35 40 12.897887 | E 23 44 26.308798 | 265.7064 | 2.9 | 3.1 | 5.9 | 2013.26–2018.25 |
| RDK1 | N 35 11 15.375737 | E 24 19 6.539699 | 25.5337 | 3.7 | 1.9 | 9.0 | 2009.18–2017.44 |
| SELI | N 35 21 14.334437 | E 23 50 22.305407 | 1038.0693 | 1.9 | 2.1 | 4.7 | 2009.52–2013.80 |
| TUC2 | N 35 31 59.482697 | E 24 4 14.015013 | 160.8894 | 2.0 | 1.9 | 4.6 | 2004.47–2018.44 |
| Site | vN (m/Year) | vE (m/Year) | vUP (m/Year) | σvN (m) | σvE (m) | σvUP (m) | Time Span (Years) |
|---|---|---|---|---|---|---|---|
| CDN0 | −0.0129 | 0.0092 | 0.0009 | 0.0003 | 0.0005 | 0.0015 | 2014.49–2018.44 |
| CDN2 | −0.0129 | 0.0063 | 0.0002 | 0.0007 | 0.0006 | 0.0036 | 2016.40–2018.44 |
| CRS1 | −0.0124 | 0.0068 | −0.0011 | 0.0002 | 0.0001 | 0.0003 | 2008.18–2018.44 |
| GVD0 | −0.0128 | 0.0081 | 0.0000 | 0.0002 | 0.0001 | 0.0004 | 2003.04–2017.35 |
| GVD7 | −0.0138 | 0.0086 | −0.0004 | 0.0001 | 0.0002 | 0.0005 | 2009.37–2018.44 |
| GVD8 | −0.0143 | 0.0082 | −0.0007 | 0.0002 | 0.0002 | 0.0007 | 2010.50–2018.44 |
| IMS1 | −0.0131 | 0.0078 | −0.0004 | 0.0002 | 0.0002 | 0.0006 | 2010.19–2015.19 |
| MEN2 | −0.0146 | 0.0058 | −0.0001 | 0.0005 | 0.0005 | 0.0007 | 2013.26–2018.25 |
| RDK1 | −0.0128 | 0.0081 | 0.0010 | 0.0004 | 0.0002 | 0.0009 | 2009.18–2017.44 |
| SELI | −0.0112 | 0.0077 | −0.0010 | 0.0004 | 0.0005 | 0.0009 | 2009.52–2013.80 |
| TUC2 | −0.0124 | 0.0075 | −0.0006 | 0.0001 | 0.0001 | 0.0002 | 2004.47–2018.44 |
| Satellite | Jason-1 | Jason-2 | Jason-3 | |
|---|---|---|---|---|
| Product | GDR-E | GDR-D | GDR-D | |
| Cycles | 70–100 | 2–303 | 1–80 | |
| SSH bias | Pass No. 18, Descending | +4.70 cm (±1.3 cm) | + 0.63 cm (±0.3 cm) | −0.74 cm (±0.4 cm) |
| Pass No. 109 Ascending | +3.50 cm (±1.3 cm) | +0.33 cm (±0.2 cm) | −0.50 cm (±0.4 cm) | |
| Average | +4.10 cm | +0.48 cm | −0.62 cm |
| SSH Bias (cm) | Satellite | Jason-1 | Jason-2 | Jason-3 | JA3 − JA2 Offset |
|---|---|---|---|---|---|
| Product | GDR-E | GDR-D | GDR-D | ||
| Cycles | 70–100 | 2–303 | 1–80 | ||
| No. 18 (descending) | +4.7 cm ± 1.3 cm | +0.63 cm ± 0.3 cm | −0.74 cm ± 0.4 cm | −1.37 cm | |
| No. 109 (ascending) | +3.5 cm ± 1.3 cm | +0.33 cm ± 0.2 cm | −0.50 cm ± 0.4 cm | −0.83 cm | |
| Average Bias | +4.10 cm | +0.48 cm | −0.62 cm | ||
| Tandem Bias (cm) | Satellite | Jason-2 | Jason-3 | JA3 − JA2 Offset | |
| Product | GDR-D/SGDR-D | GDR-D/SGDR-D | |||
| Cycles | 285–303 | 5–23 | |||
| Sea-Surface Height | No.18 (descending) | +2.70 cm ± 0.9 cm | +0.27 cm ± 0.9 cm | −2.43 cm | |
| No. 109 (ascending) | +1.62 cm ± 0.9 cm | −0.98 cm ± 0.9 cm | −2.60 cm | ||
| Transponder | No. 18 (descending) | −0.40 cm ± 0.6 cm | +1.30 cm ± 0.5 cm | +1.70 cm | |
| Range Bias | Satellite | Jason-2 | Jason-3 | JA3 − JA2 Offset | |
| Product | SGDR-D | GDR-D | |||
| Cycles | 267–303 | 1–80 | |||
| Transponder | Descending | −1.20 cm ± 0.6 cm | +0.76 cm ± 0.4 cm | +1.96 cm |
| Standard Uncertainty | Uncertainty Estimates | Divisor | Standardized Uncertainty | Sensitivity Coefficient | Uncertainty Component | Degrees of Freedom |
|---|---|---|---|---|---|---|
| GPS Height Processing | 0.14 mm | 1 | 0.14 mm | 1 | 0.14 mm | 1759 |
| GPS Receiver Manufacturer | 6.0 mm | 3.5 mm | 1 | 3.5 mm | 50 | |
| GPS Antenna Reference Point, Lab Calibration | 2.0 mm | 1 | 2.0 mm | 1 | 2.0 mm | ∞ |
| Water Level Observations | 1.3 mm | 1 | 1.3 mm | 1 | 1.3 mm | 19 |
| Tide Gauge Zero Offset | 5.0 mm | 2.9 mm | 1 | 2.9 mm | 2 | |
| Tide Gauge Vertical Misalignment | 2.4 mm | 1.4 mm | 1 | 1.4 mm | 50 | |
| Tide Gauge Calibration Certificate | 5.5 mm | 1 | 5.5 mm | 1 | 5.5 mm | ∞ |
| Spirit Levelling | 0.13 mm | 1 | 0.13 mm | 1 | 0.13 mm | 15 |
| GNSS and Tide Gauge Thermal Expansion | 1.1 mm | 0.6 mm | 1 | 0.6 mm | 50 | |
| Spirit Levelling Target Misalignment | 1.0 mm | 0.6 mm | 1 | 0.6 mm | 50 | |
| Observer’s Experience | 1.0 mm | 0.6 mm | 1 | 0.6 mm | 50 | |
| Spirit Levelling Instrument | 1.0 mm | 0.6 mm | 1 | 0.6 mm | ∞ | |
| Water Level at Tide Pole | 1.0 mm | 0.6 mm | 1 | 0.6 mm | ∞ | |
| MSS/Geoid Models | 5.8 mm | 1 | 5.8 mm | 1 | 5.8 mm | 8 |
| Cal/Val Processing and Transformations | 0.5 mm | 0.3 mm | 1 | 0.3 mm | 50 | |
| Geoid Slope | 10.0 mm | 5.8 mm | 1 | 5.8 mm | 50 | |
| Unaccounted Uncertainty | 50.00 mm | 28 mm | 1 | 28 mm | 50 | |
| Root Sum Square | 52 mm | 31.0 mm | 1 | 31 mm | 50 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mertikas, S.P.; Donlon, C.; Féménias, P.; Mavrocordatos, C.; Galanakis, D.; Tripolitsiotis, A.; Frantzis, X.; Tziavos, I.N.; Vergos, G.; Guinle, T. Fifteen Years of Cal/Val Service to Reference Altimetry Missions: Calibration of Satellite Altimetry at the Permanent Facilities in Gavdos and Crete, Greece. Remote Sens. 2018, 10, 1557. https://doi.org/10.3390/rs10101557
Mertikas SP, Donlon C, Féménias P, Mavrocordatos C, Galanakis D, Tripolitsiotis A, Frantzis X, Tziavos IN, Vergos G, Guinle T. Fifteen Years of Cal/Val Service to Reference Altimetry Missions: Calibration of Satellite Altimetry at the Permanent Facilities in Gavdos and Crete, Greece. Remote Sensing. 2018; 10(10):1557. https://doi.org/10.3390/rs10101557
Chicago/Turabian StyleMertikas, Stelios P., Craig Donlon, Pierre Féménias, Constantin Mavrocordatos, Demitris Galanakis, Achilles Tripolitsiotis, Xenophon Frantzis, Ilias N. Tziavos, George Vergos, and Thierry Guinle. 2018. "Fifteen Years of Cal/Val Service to Reference Altimetry Missions: Calibration of Satellite Altimetry at the Permanent Facilities in Gavdos and Crete, Greece" Remote Sensing 10, no. 10: 1557. https://doi.org/10.3390/rs10101557
APA StyleMertikas, S. P., Donlon, C., Féménias, P., Mavrocordatos, C., Galanakis, D., Tripolitsiotis, A., Frantzis, X., Tziavos, I. N., Vergos, G., & Guinle, T. (2018). Fifteen Years of Cal/Val Service to Reference Altimetry Missions: Calibration of Satellite Altimetry at the Permanent Facilities in Gavdos and Crete, Greece. Remote Sensing, 10(10), 1557. https://doi.org/10.3390/rs10101557