

LiDAR-Based Detection of Field Hamster (Cricetus cricetus) Burrows in Agricultural Fields



Abstract
1. Introduction
2. Materials and Methods
2.1. Study Area
2.2. Collection of Reference Data
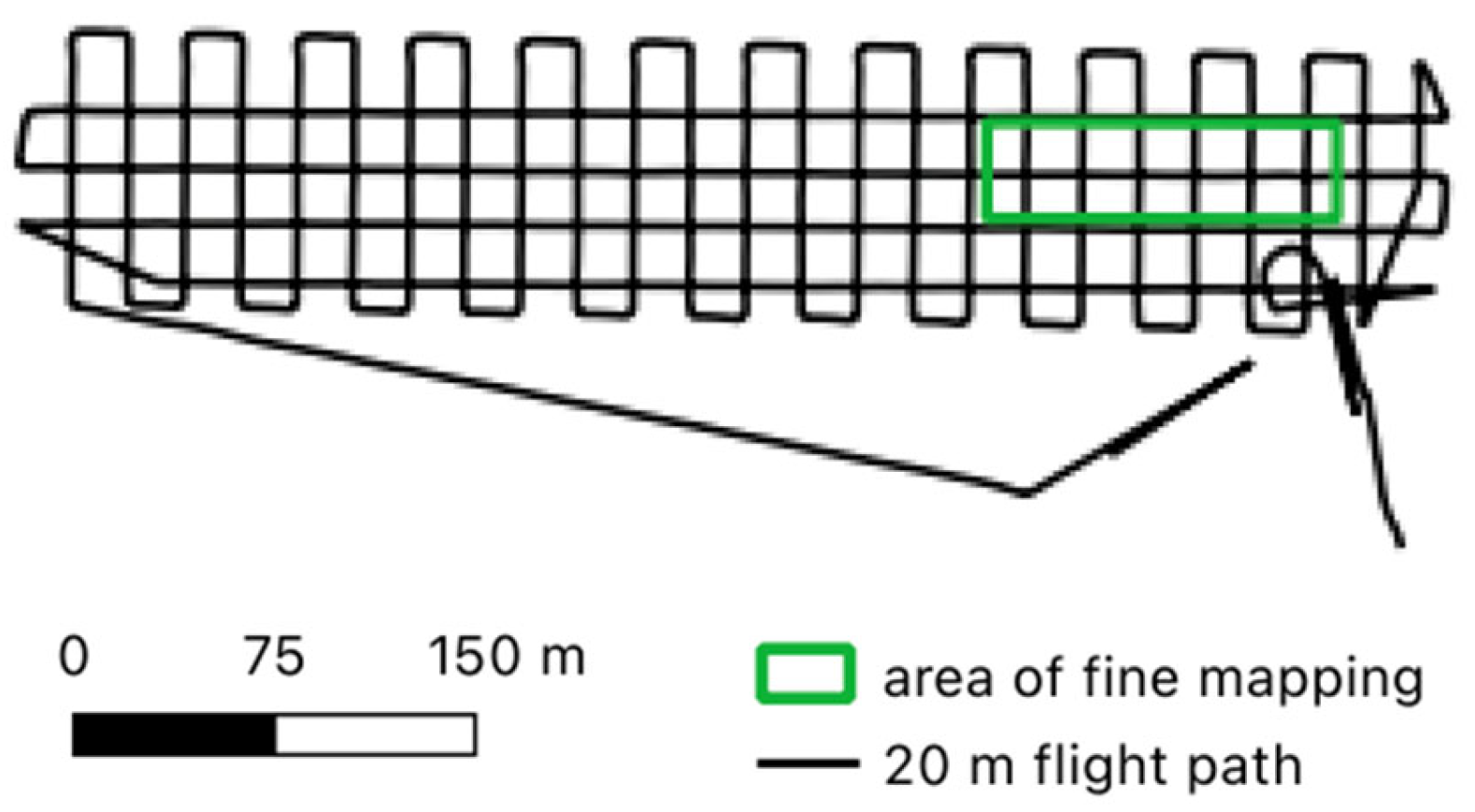
2.3. Collection of LiDAR Data
2.4. Burrow Entrance Detection Algorithm
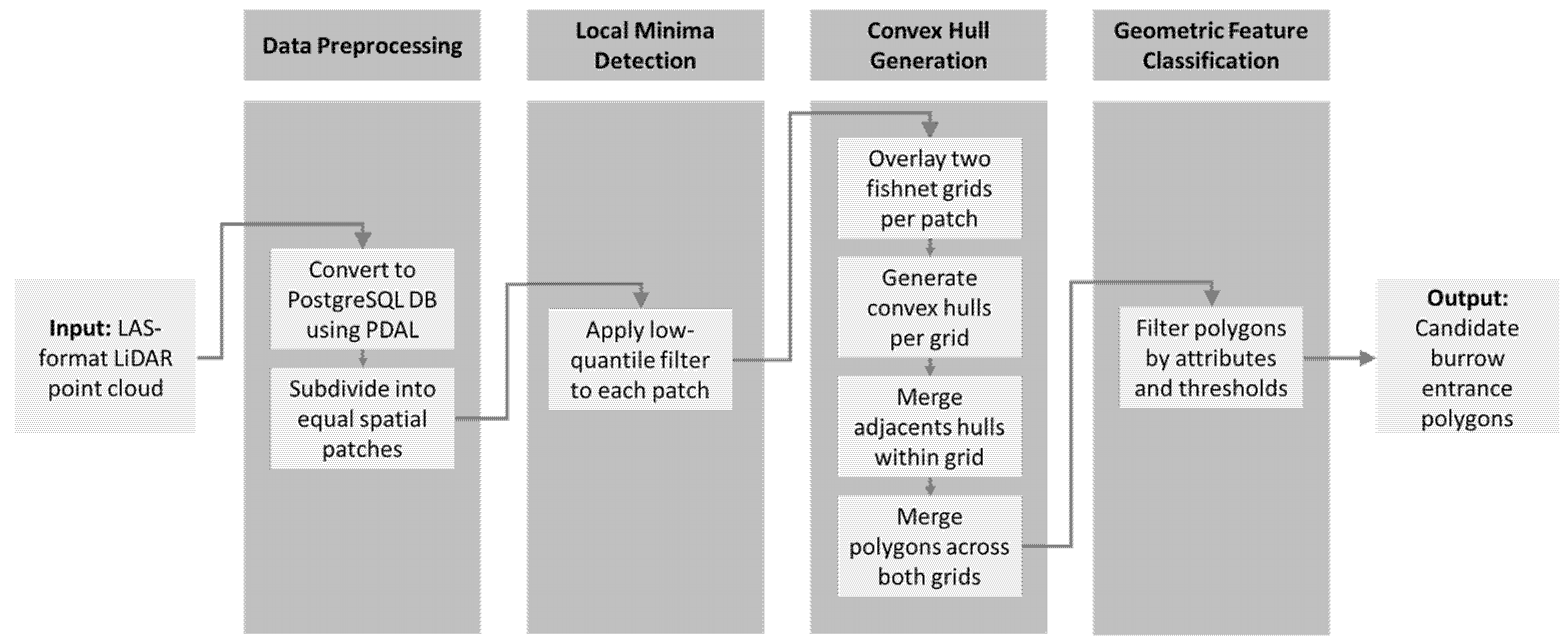
2.4.1. Concept
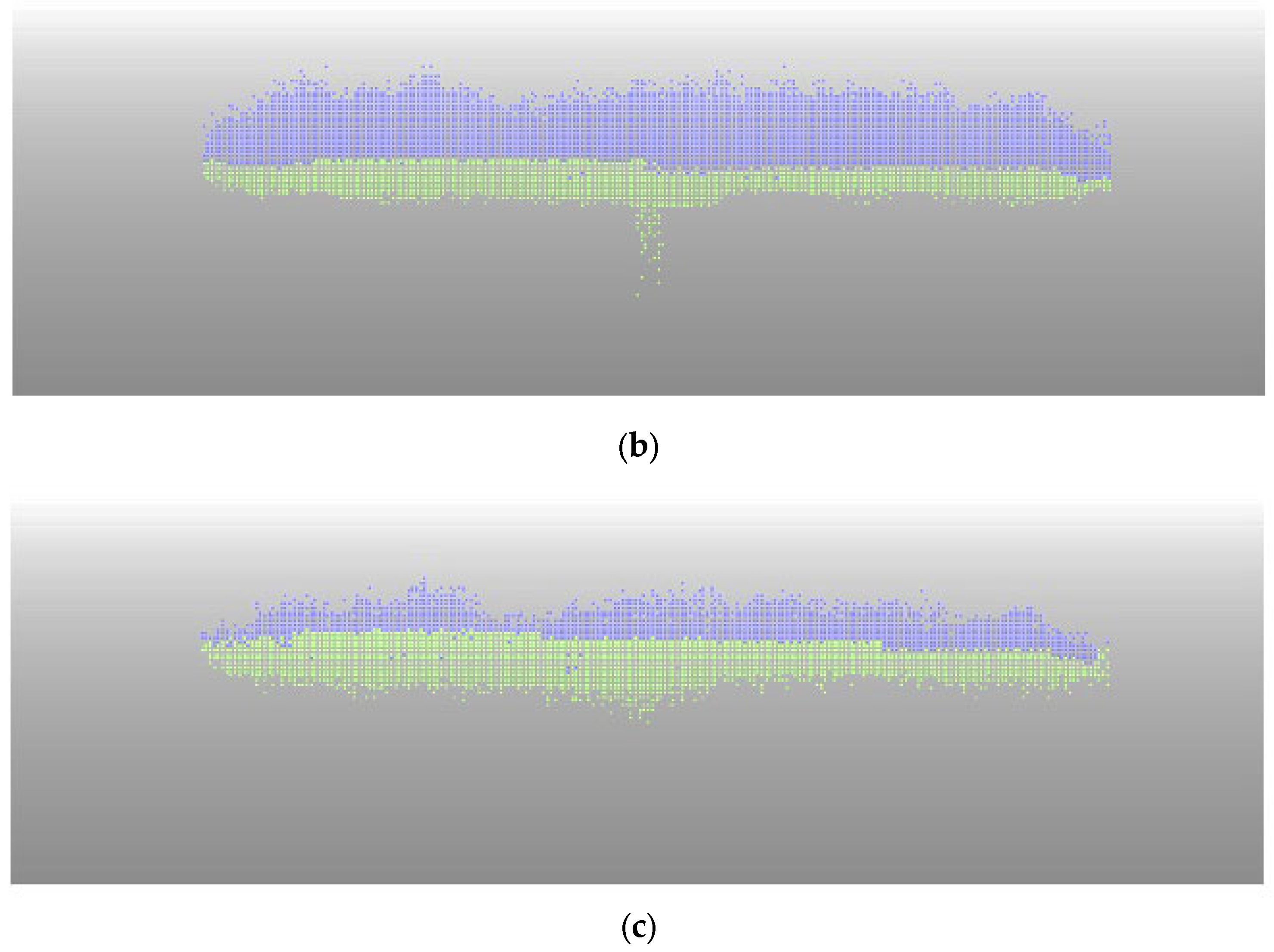
2.4.2. Data Preprocessing
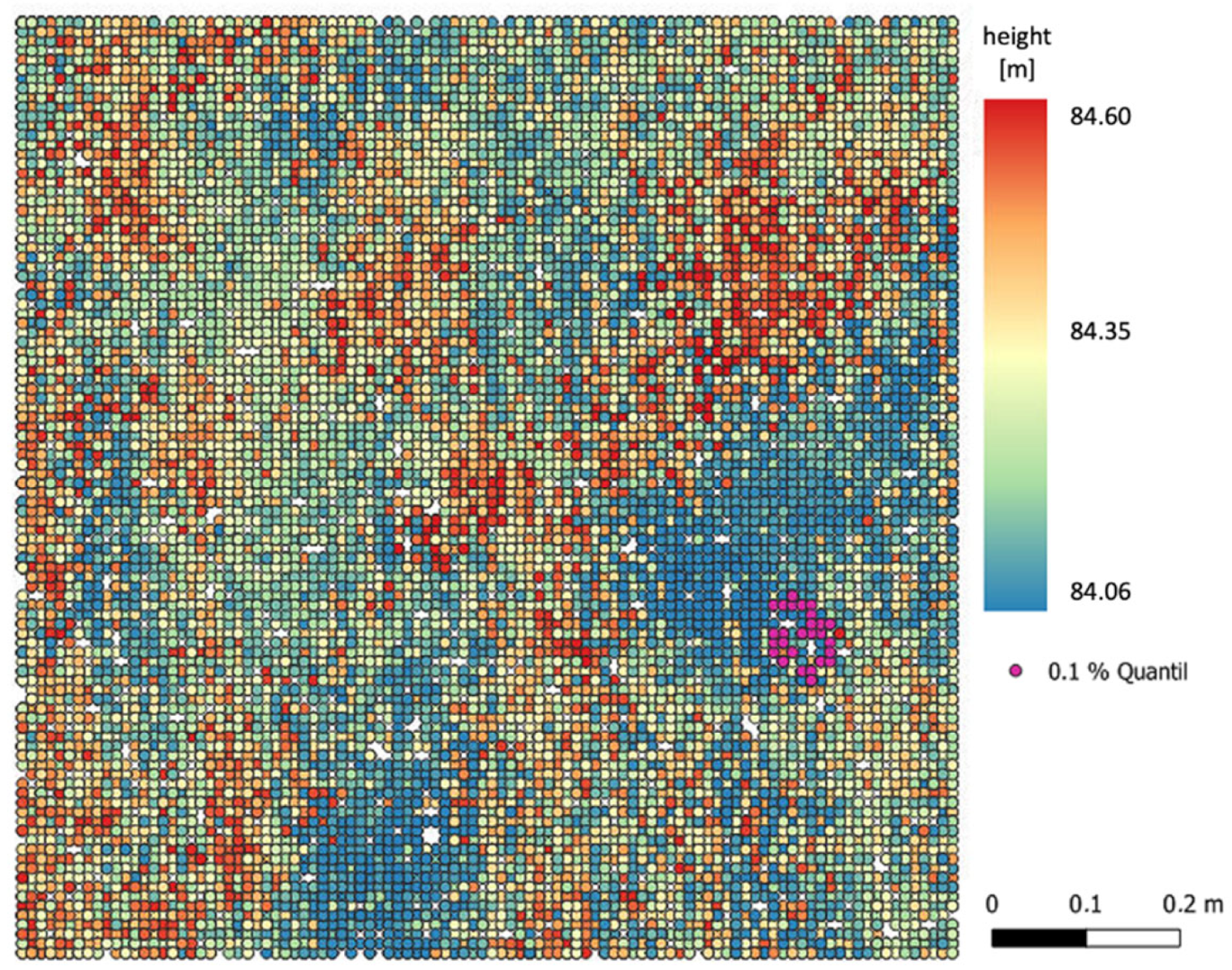
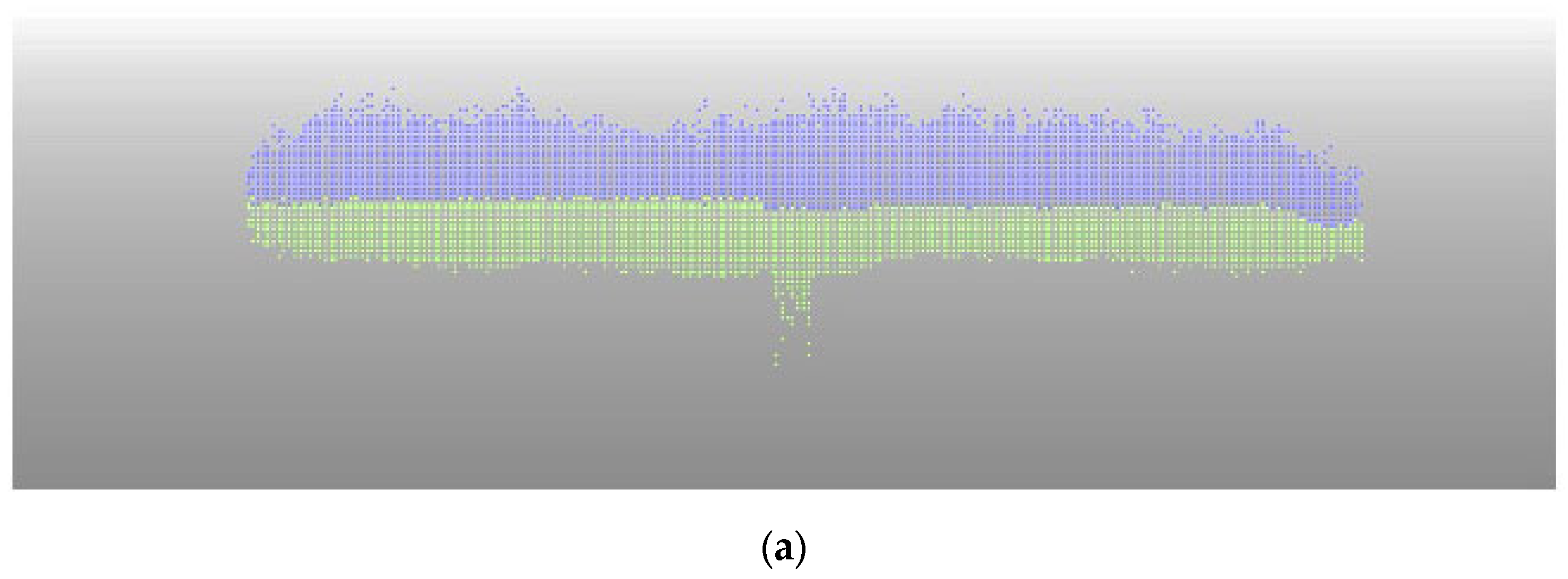
2.4.3. Detection of Local Depth Minima
2.4.4. Convex Hull Generation
2.4.5. Geometric Feature Classification and Filtering
3. Results
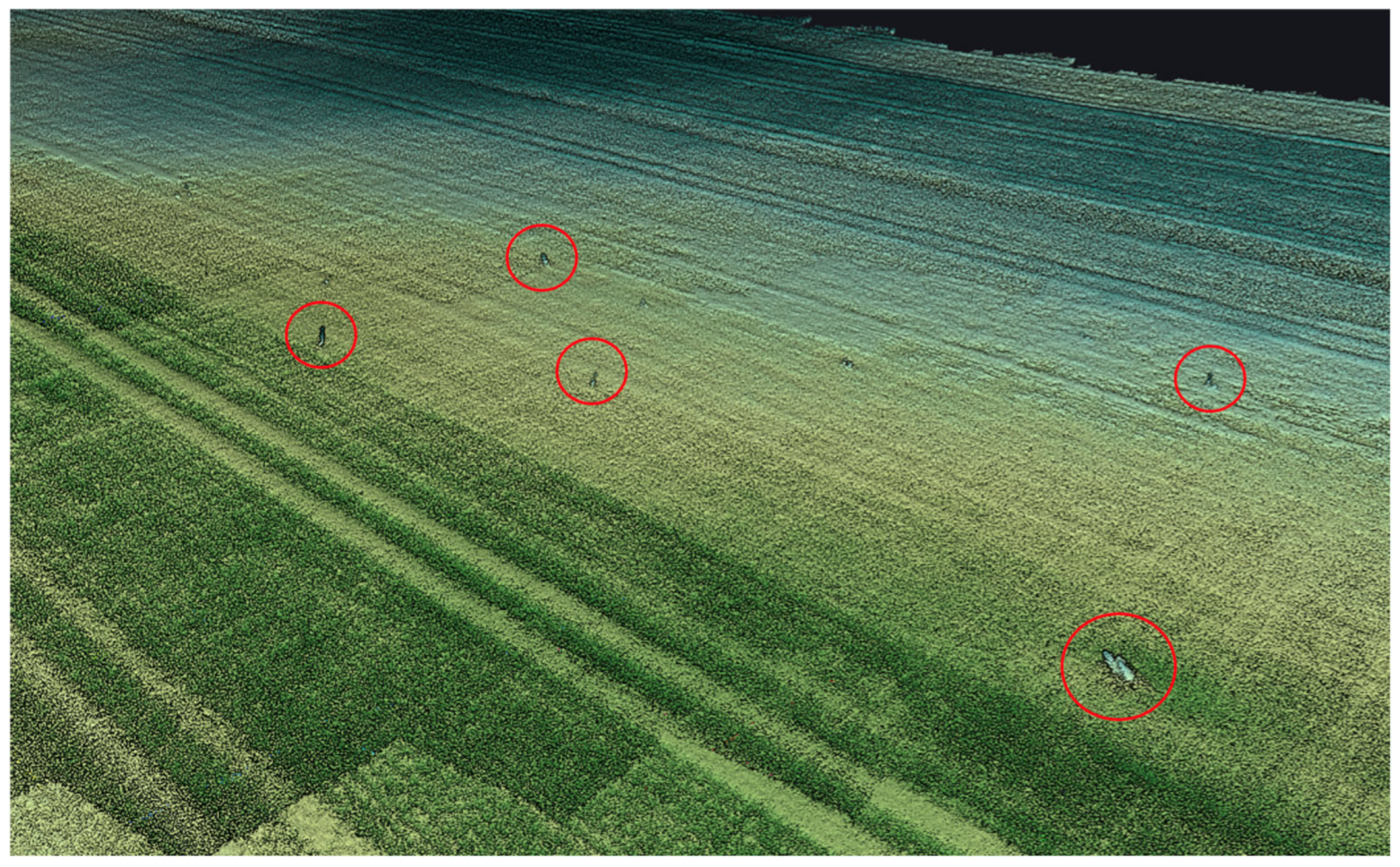
3.1. Confirmed Hamster Burrows
3.2. LiDAR Dataset Quality
3.3. Burrow Entrance Detection Accuracy
3.4. An Evaluation of the Burrow Entrance Detection Algorithm
4. Discussion
4.1. Limitations and Uncertainty of Results
4.2. Differentiation Between Hamster and Vole Burrows
4.3. Performance in the Context of Related Studies
4.4. Technological Innovations and Future Potential
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Banaszek, A.; Bogomolov, P.; Feoktistova, N.; La Haye, M.; Monecke, S.; Reiners, T.E.; Rusin, M.; Surov, A.; Weinhold, U.; Ziomek, J. Cricetus cricetus . In The IUCN Red List of Threatened Species 2020; IUCN: Gran, Switzerland, 2020; p. e.T5529A111875852. [Google Scholar] [CrossRef]
- Meinig, H.; Boye, P.; Dähne, M.; Hutterer, R.; Lang, J. Rote Liste und Gesamtartenliste derSäugetiere (Mammalia) Deutschlands. Bundesamt für Naturschutz; Landwirtschaftsverlag GmbH: Münster, Germany, 2020; ISBN 978-3-7843-3772-2. [Google Scholar]
- Brakes, C.R.; Smith, R.H. Exposure of Non-target Small Mammals to Rodenticides: Short-term Effects, Recovery and Implications for Secondary Poisoning. J. Appl. Ecol. 2005, 42, 118–128. [Google Scholar] [CrossRef]
- Surov, A.; Banaszek, A.; Bogomolov, P.; Feoktistova, N.; Monecke, S. Dramatic Global Decrease in the Range and Reproduction Rate of the European Hamster Cricetus cricetus. Endanger. Species Res. 2016, 31, 119–145. [Google Scholar] [CrossRef]
- Gao, X.; Bi, Y.; Du, J. Identification of Ratholes in Desert Steppe Based on UAV Hyperspectral Remote Sensing. Appl. Sci. 2023, 13, 7057. [Google Scholar] [CrossRef]
- Chanev, M.; Dolapchiev, N.; Kamenova, I.; Filchev, L. Application of Remote Sensing Methods for Monitoring Wild Life Populations: A Review. In Proceedings of the Ninth International Conference on Remote Sensing and Geoinformation of the Environment (RSCy2023), Ayia Napa, Cyprus, 3–5 April 2023; Themistocleous, K., Michaelides, S., Hadjimitsis, D.G., Papadavid, G., Eds.; SPIE: Ayia Napa, Cyprus, 2023; p. 36. [Google Scholar]
- Zhang, Z.; Zhu, L. A Review on Unmanned Aerial Vehicle Remote Sensing: Platforms, Sensors, Data Processing Methods, and Applications. Drones 2023, 7, 398. [Google Scholar] [CrossRef]
- Bycroft, R.; Leon, J.X.; Schoeman, D. Comparing Random Forests and Convoluted Neural Networks for Mapping Ghost Crab Burrows Using Imagery from an Unmanned Aerial Vehicle. Estuar. Coast. Shelf Sci. 2019, 224, 84–93. [Google Scholar] [CrossRef]
- Stuhler, J.D.; Portillo-Quintero, C.; Goetze, J.R.; Stevens, R.D. Efficacy of Remote Sensing Technologies for Burrow Count Estimates of a Rare Kangaroo Rat. Wildl. Soc. Bull. 2024, 48, e1510. [Google Scholar] [CrossRef]
- Gedeon, C.I.; Árvai, M.; Szatmári, G.; Brevik, E.C.; Takáts, T.; Kovács, Z.A.; Mészáros, J. Identification and Counting of European Souslik Burrows from UAV Images by Pixel-Based Image Analysis and Random Forest Classification: A Simple, Semi-Automated, yet Accurate Method for Estimating Population Size. Remote Sens. 2022, 14, 2025. [Google Scholar] [CrossRef]
- Kearney, S.P.; Porensky, L.M.; Augustine, D.J.; Pellatz, D.W. Toward Broad-Scale Mapping and Characterization of Prairie Dog Colonies from Airborne Imagery Using Deep Learning. Ecol. Indic. 2023, 154, 110684. [Google Scholar] [CrossRef]
- Ha, S.-B.; Jang, Y.; Seo, J.; Kim, K.; Koo, B.J.; Ryu, J.-H.; Lee, S.-K. Burrow Opening Measurements of Intertidal Macroinvertebrates from Optical Drone Images. Remote Sens. 2024, 16, 1941. [Google Scholar] [CrossRef]
- Virtue, J.; Turner, D.; Williams, G.; Zeliadt, S.; Walshaw, H.; Lucieer, A. Burrow-Nesting Seabird Survey Using UAV-Mounted Thermal Sensor and Count Automation. Drones 2023, 7, 674. [Google Scholar] [CrossRef]
- Davies, A.B.; Asner, G.P. Advances in Animal Ecology from 3D-LiDAR Ecosystem Mapping. Trends Ecol. Evol. 2014, 29, 681–691. [Google Scholar] [CrossRef] [PubMed]
- De Vries, J.P.R.; Koma, Z.; WallisDeVries, M.F.; Kissling, W.D. Identifying Fine-scale Habitat Preferences of Threatened Butterflies Using Airborne Laser Scanning. Divers. Distrib. 2021, 27, 1251–1264. [Google Scholar] [CrossRef]
- Young, M.; Andrews, J.; Caldwell, T.; Saylam, K. Airborne LiDAR and Aerial Imagery to Assess Potential Burrow Locations for the Desert Tortoise (Gopherus agassizii). Remote Sens. 2017, 9, 458. [Google Scholar] [CrossRef]
- Nechay, G. Status of Hamsters, Cricetus cricetus, Cricetus migratorius, Mesocricetus newtoni and Other Hamster Species in Europe, Nature and Environment; Council of Europe Publ.: Strasbourg, France, 2000; ISBN 978-92-871-4330-3. [Google Scholar]
- PDAL Contributors PDAL Point Data Abstraction Library 2023. Available online: https://pdal.io/en/latest/ (accessed on 5 May 2025).
- Tiede, D.; Hochleitner, G.; Blaschke, T. A Full GIS-Based Workflow for Tree Identification and Tree Crown Delineation Using Laser Scanning. In Proceedings of the ISPRS Workshop CMRT, Vienna, Austria, 29–30 August 2005; ISPRS: Baton Rouge, LA, USA, 2005; Volume 5, p. 2005. [Google Scholar]
- Kim, Y.J.; Nam, B.H.; Youn, H. Sinkhole Detection and Characterization Using LiDAR-Derived DEM with Logistic Regression. Remote Sens. 2019, 11, 1592. [Google Scholar] [CrossRef]
- Montero, R.S.; Bribiesca, E. State of the Art of Compactness and Circularity Measures. Int. Math. Forum 2009, 4, 1305–1335. Available online: https://www.m-hikari.com/imf-password2009/25-28-2009/bribiescaIMF25-28-2009.pdf (accessed on 15 June 2025).
- Petrová, I.; Petriláková, M.; Losík, J.; Gouveia, A.; Damugi, I.E.D.; Tkadlec, E. Density-Related Pattern of Variation in Body Growth, Body Size and Annual Productivity in the Common Hamster. Mamm. Biol. 2018, 91, 34–40. [Google Scholar] [CrossRef]
- Olea, P.P.; De Diego, N.; García, J.T.; Viñuela, J. Habitat Type Modulates Sharp Body Mass Oscillations in Cyclic Common Vole Populations. Sci. Rep. 2024, 14, 12013. [Google Scholar] [CrossRef]
- Kirn, N. Ontogenese Des Europäischen Feldhamsters (Cricetus cricetus) Unter Dem Einfluss Verschiedener Prä-Und Postnataler Photoperioden. Ph.D. Thesis, Tierärztliche Hochschule Hannover, Hannover, Germany, 2004. [Google Scholar]
- Ezzy, H.; Charter, M.; Bonfante, A.; Brook, A. How the Small Object Detection via Machine Learning and UAS-Based Remote-Sensing Imagery Can Support the Achievement of SDG2: A Case Study of Vole Burrows. Remote Sens. 2021, 13, 3191. [Google Scholar] [CrossRef]
- Katzman, E.A.; Zaytseva, E.A.; Feoktistova, N.Y.; Tovpinetz, N.N.; Bogomolov, P.L.; Potashnikova, E.V.; Surov, A.V. Seasonal Changes in Burrowing of the Common Hamster (Cricetus cricetus L., 1758) (Rodentia: Cricetidae) in the City. PJE 2018, 17, 251–258. [Google Scholar] [CrossRef]
- Kryštufek, B.; Hoffmann, I.E.; Nedyalkov, N.; Pozdnyakov, A.; Vohralík, V. Cricetus cricetus (Rodentia: Cricetidae). Mamm. Species 2020, 52, 10–26. [Google Scholar] [CrossRef]
- Karaseva, E.; Shilayeva, L. The Structure of Hamster Burrows in Relation to Its Age and the Season. Byulletin’Moskovskogo Obs. Ispyt. Prirody Otd. Biol. 1965, 70, 30–39. [Google Scholar]
- Popescu, S.C.; Wynne, R.H.; Nelson, R.F. Measuring Individual Tree Crown Diameter with Lidar and Assessing Its Influence on Estimating Forest Volume and Biomass. Can. J. Remote Sens. 2003, 29, 564–577. [Google Scholar] [CrossRef]
- Rudge, M.L.M.; Levick, S.R.; Bartolo, R.E.; Erskine, P.D. Modelling the Diameter Distribution of Savanna Trees with Drone-Based LiDAR. Remote Sens. 2021, 13, 1266. [Google Scholar] [CrossRef]
- Unger, D.R.; Hung, I.-K.; Brooks, R.; Williams, H. Estimating Number of Trees, Tree Height and Crown Width Using Lidar Data. GIScience Remote Sens. 2014, 51, 227–238. [Google Scholar] [CrossRef]
- Falkowski, M.J.; Smith, A.M.S.; Hudak, A.T.; Gessler, P.E.; Vierling, L.A.; Crookston, N.L. Automated Estimation of Individual Conifer Tree Height and Crown Diameter via Two-Dimensional Spatial Wavelet Analysis of Lidar Data. Can. J. Remote Sens. 2006, 32, 153–161. [Google Scholar] [CrossRef]
- Chlaib, H.K.; Mahdi, H.; Al-Shukri, H.; Su, M.M.; Catakli, A.; Abd, N. Using Ground Penetrating Radar in Levee Assessment to Detect Small Scale Animal Burrows. J. Appl. Geophys. 2014, 103, 121–131. [Google Scholar] [CrossRef]
- Talha, S.A.; Manasreh, D.; Nazzal, M.D. The Use of Lidar and Artificial Intelligence Algorithms for Detection and Size Estimation of Potholes. Buildings 2024, 14, 1078. [Google Scholar] [CrossRef]
- Rodrigues, W.G.; Vieira, G.S.; Cabacinha, C.D.; Bulcão-Neto, R.F.; Soares, F. Applications of Artificial Intelligence and LiDAR in Forest Inventories: A Systematic Literature Review. Comput. Electr. Eng. 2024, 120, 109793. [Google Scholar] [CrossRef]
- Thürkow, F.; Lorenz, C.; Ramstetter, J.; Hoppe, I.; Haase, M. KI-basierte Detektion von Feldhamsterbauen auf landwirtschaftlichen Nutzflächen mittels multi-sensoraler UAS-Daten. In Proceedings of the Ökologische Nachhaltigkeit—Kolloquium Landwirtschaft der Zukunft—Ist KI ein Wesentlicher Schlüssel zur Nachhaltigeren Landwirtschaft? Berlin, Germany, 28 September 2023; Available online: https://www.researchgate.net/publication/378041194_KI-basierte_Detektion_von_Feldhamsterbauen_auf_landwirtschaftlichen_Nutzflachen_mittels_multi-sensoraler_UAS-Daten (accessed on 5 June 2025).
- Mammen, U.; Kayser, A.; Mammen, K.; Raddatz, D.; Weinhold, U. Die Berücksichtigung Des Feldhamsters (Cricetus cricetus) Im Rahmen von Eingriffsvorhaben. Nat. Landsch. 2014, 89, 0028–0615. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dataset Name | Mapper+ | Voyager 20 m | Voyager 30 m | Voyager 120 m |
|---|---|---|---|---|
| Sensor | YellowScan Mapper+ | YellowScan Voyager | YellowScan Voyager | YellowScan Voyager |
| Drone system | DJI M600 | Acecore NOA | Acecore NOA | Acecore NOA |
| Flight date | 31 August 2022 | 5 May 2023 | 5 May 2023 | 5 May 2023 |
| Altitude [m] | 30 | 20 | 30 | 120 |
| Precision [cm] | 2.5 | 0.5 | 0.5 | 0.5 |
| Accuracy [cm] | 3 | 1 | 1 | 1 |
| Maximum echoes | 3 | 15 | 15 | 15 |
| Point density [points/m2] | 6360 | 22,583 | 14,587 | 2972 |
| Used in accuracy evaluation | No * | Yes | Yes | Yes |
| Attribute | Description or Calculation | Filter Threshold | Justification |
|---|---|---|---|
| Roundness | Calculated using the common circularity index , where values close to 1 indicate a near-perfect circle and values near 0 indicate elongation or irregularity [21]. | ≥0.54 | Excludes elongated or fragmented shapes not consistent with burrow entrance morphology. |
| Area | The surface area enclosed by the convex hull. | ≤0.05 m2 | Based on maximum observed burrow footprint in field measurements. |
| Depth 1 | The vertical range within the convex hull, i.e., the difference between its highest and lowest point. | ≥0.07 m | Ensures sufficient vertical depression within the polygon. |
| Depth 2 | The difference between the average elevation in a 10 cm radius surrounding the polygon and its lowest point, providing a measure of its contrast to the immediate neighborhood. | ≥0.15 m | Captures the relative depression compared to the local terrain. |
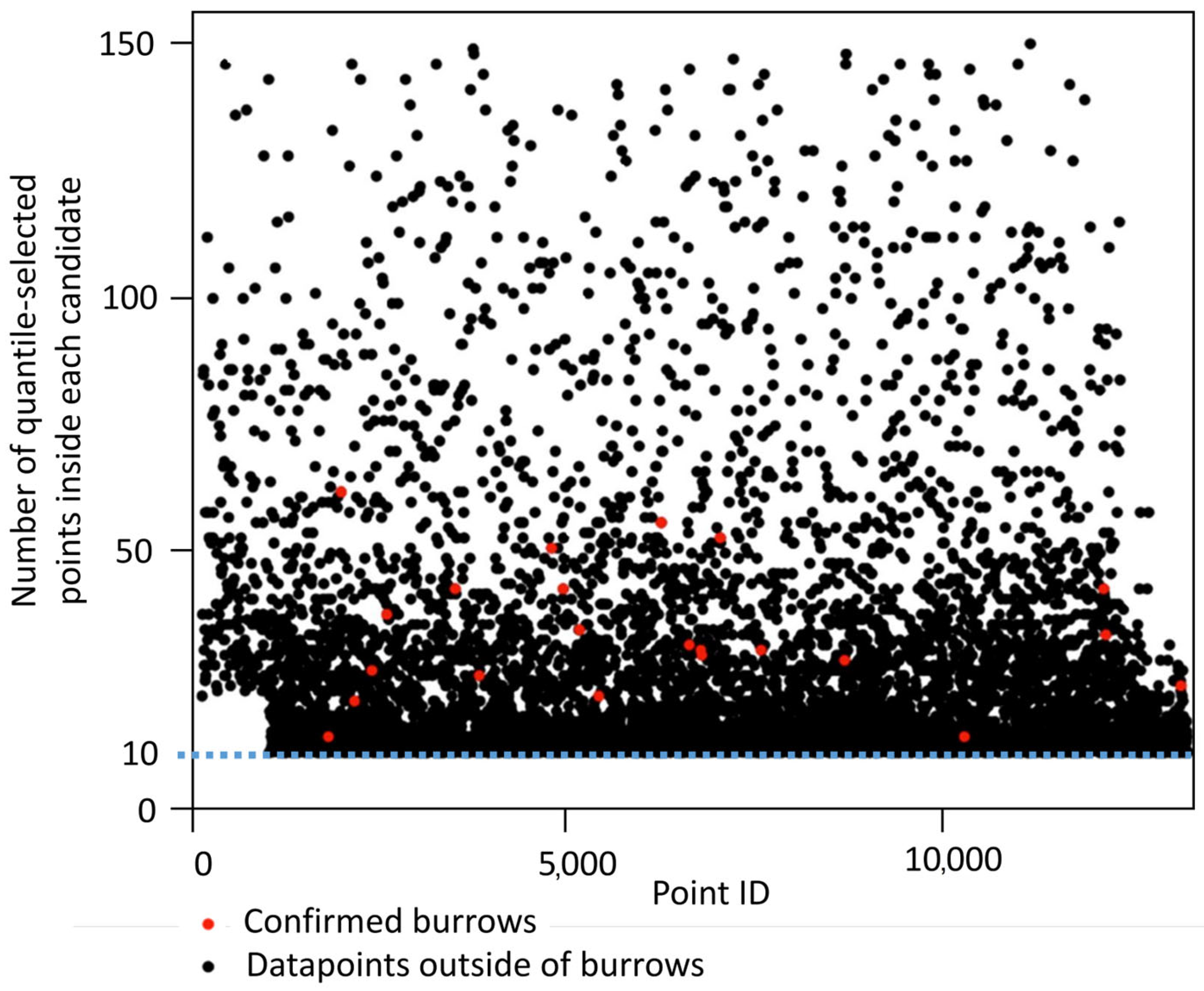
| nPoints | The number of quantile-selected points forming the polygon. | ≥10 | Guarantees a minimal structural density and prevents noise-driven detections. |
| Type of Hole | Number | Burrow Depth [cm] | Burrow Entrance Diameter [cm] | Feeding Circle Diameter [cm] | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Minimum | Maximum | Mean | Minimum | Maximum | Mean | Minimum | Maximum | Mean | ||
| Drop hole | 14 | 23.0 | 119.0 | 61.7 | 4.5 | 8.5 | 6.7 | 20.0 | 40.0 | 28.6 |
| Slip hole | 2 | 28.0 | 50.0 | 39.0 | 6.0 | 7.0 | 6.5 | 40.0 | 60.0 | 50.0 |
| Metric | Mapper+ | Voyager 20 m | Voyager 30 m | Voyager 120 m |
|---|---|---|---|---|
| Precision | 0.71 | 0.77 | 0.80 | 0.61 |
| Recall | - | 0.87 | 0.87 | 0.61 |
| F1-score | - | 0.82 | 0.83 | 0.61 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Thürkow, F.; Mohri, M.; Ramstetter, J.; Alb, P. LiDAR-Based Detection of Field Hamster (Cricetus cricetus) Burrows in Agricultural Fields. Sustainability 2025, 17, 6366. https://doi.org/10.3390/su17146366
Thürkow F, Mohri M, Ramstetter J, Alb P. LiDAR-Based Detection of Field Hamster (Cricetus cricetus) Burrows in Agricultural Fields. Sustainability. 2025; 17(14):6366. https://doi.org/10.3390/su17146366
Chicago/Turabian StyleThürkow, Florian, Milena Mohri, Jonas Ramstetter, and Philipp Alb. 2025. "LiDAR-Based Detection of Field Hamster (Cricetus cricetus) Burrows in Agricultural Fields" Sustainability 17, no. 14: 6366. https://doi.org/10.3390/su17146366
APA StyleThürkow, F., Mohri, M., Ramstetter, J., & Alb, P. (2025). LiDAR-Based Detection of Field Hamster (Cricetus cricetus) Burrows in Agricultural Fields. Sustainability, 17(14), 6366. https://doi.org/10.3390/su17146366