


Design of Concrete Block Paving in Home Zone Traffic Circle Areas


Abstract
1. Introduction
- –
- Increased dynamic loading at vertical deflections,
- –
- Higher horizontal forces caused by decelerations and accelerations, whose magnitudes depend on the driving habits and tempers of drivers.
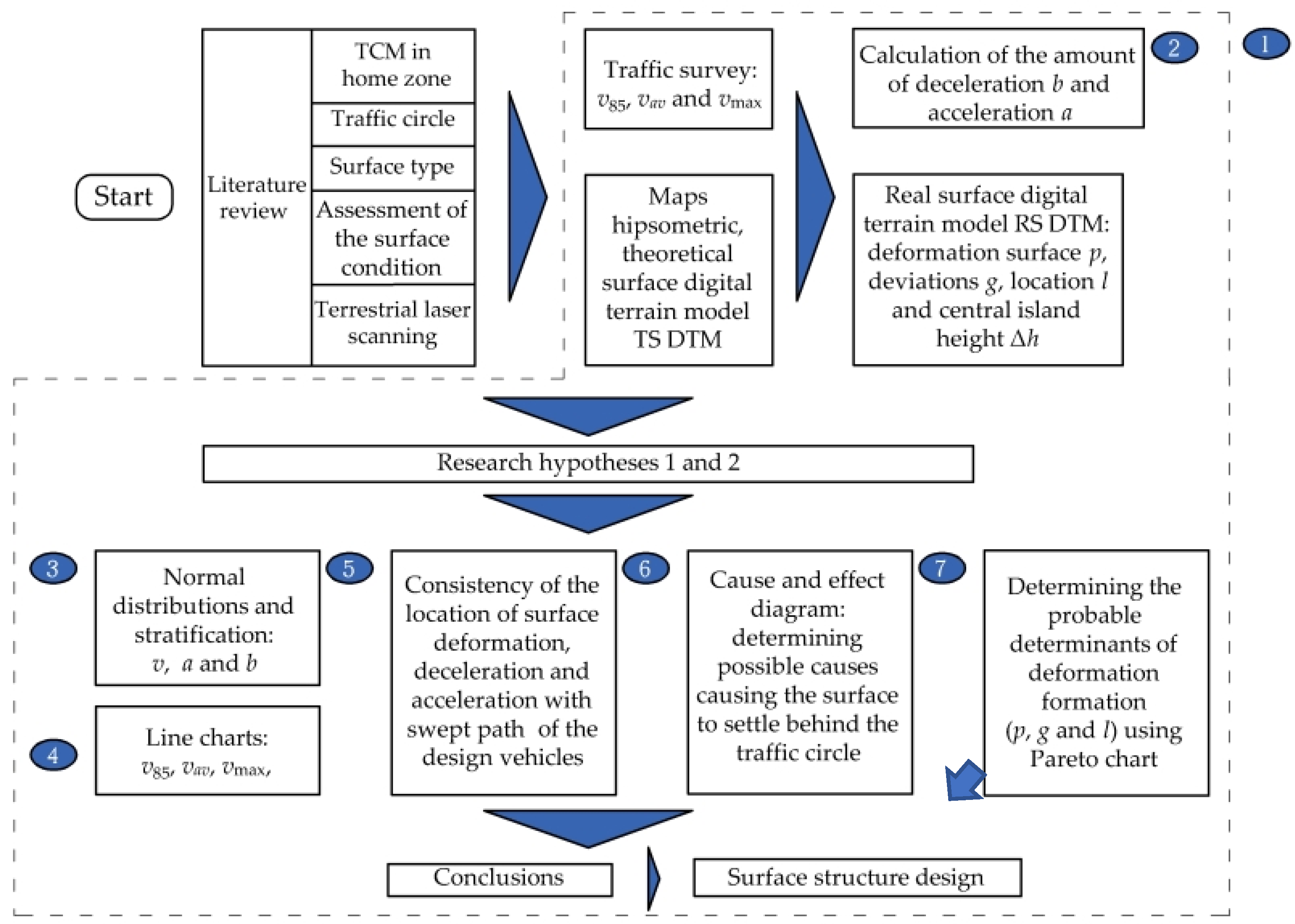
2. Materials and Methodology
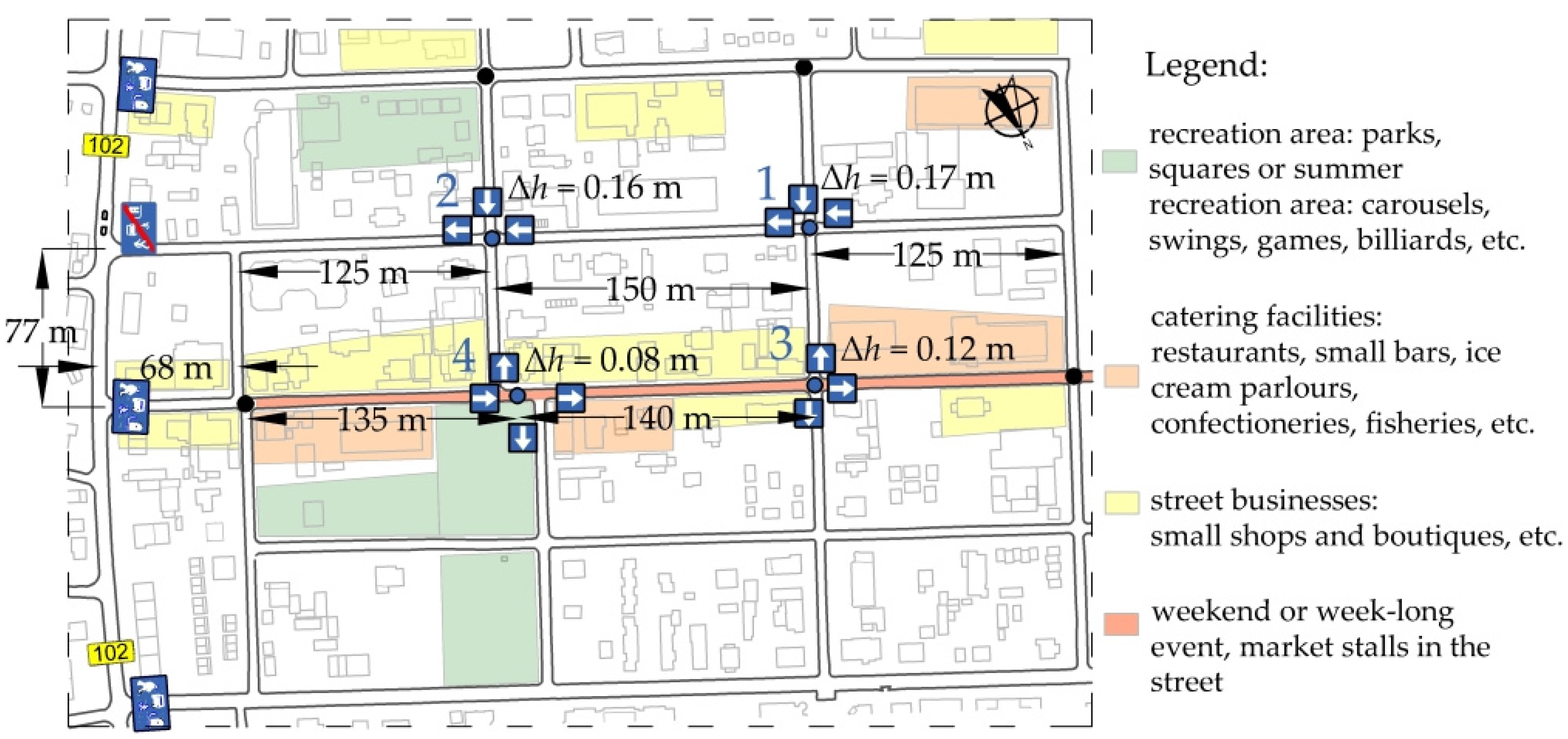
2.1. Study Area
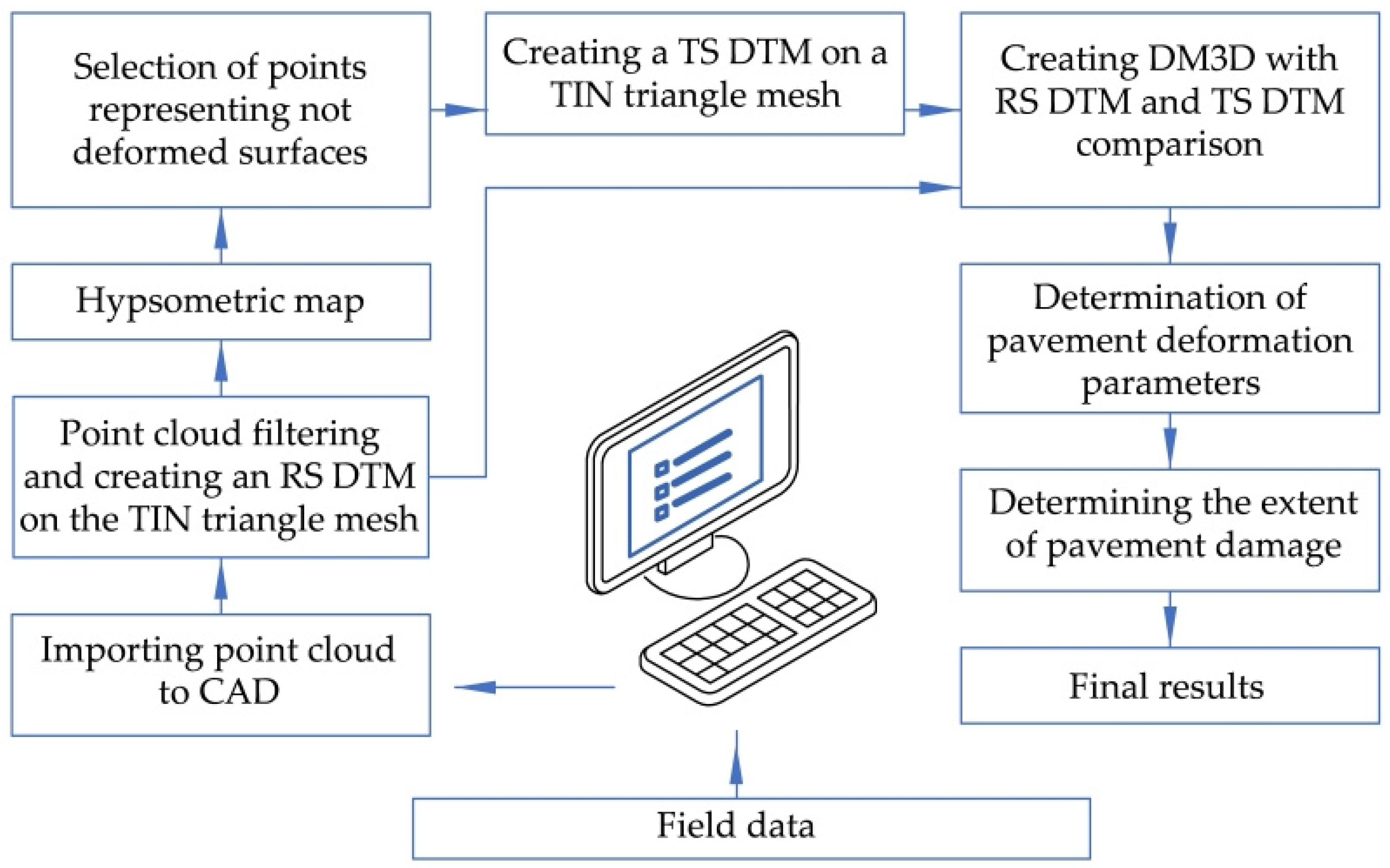
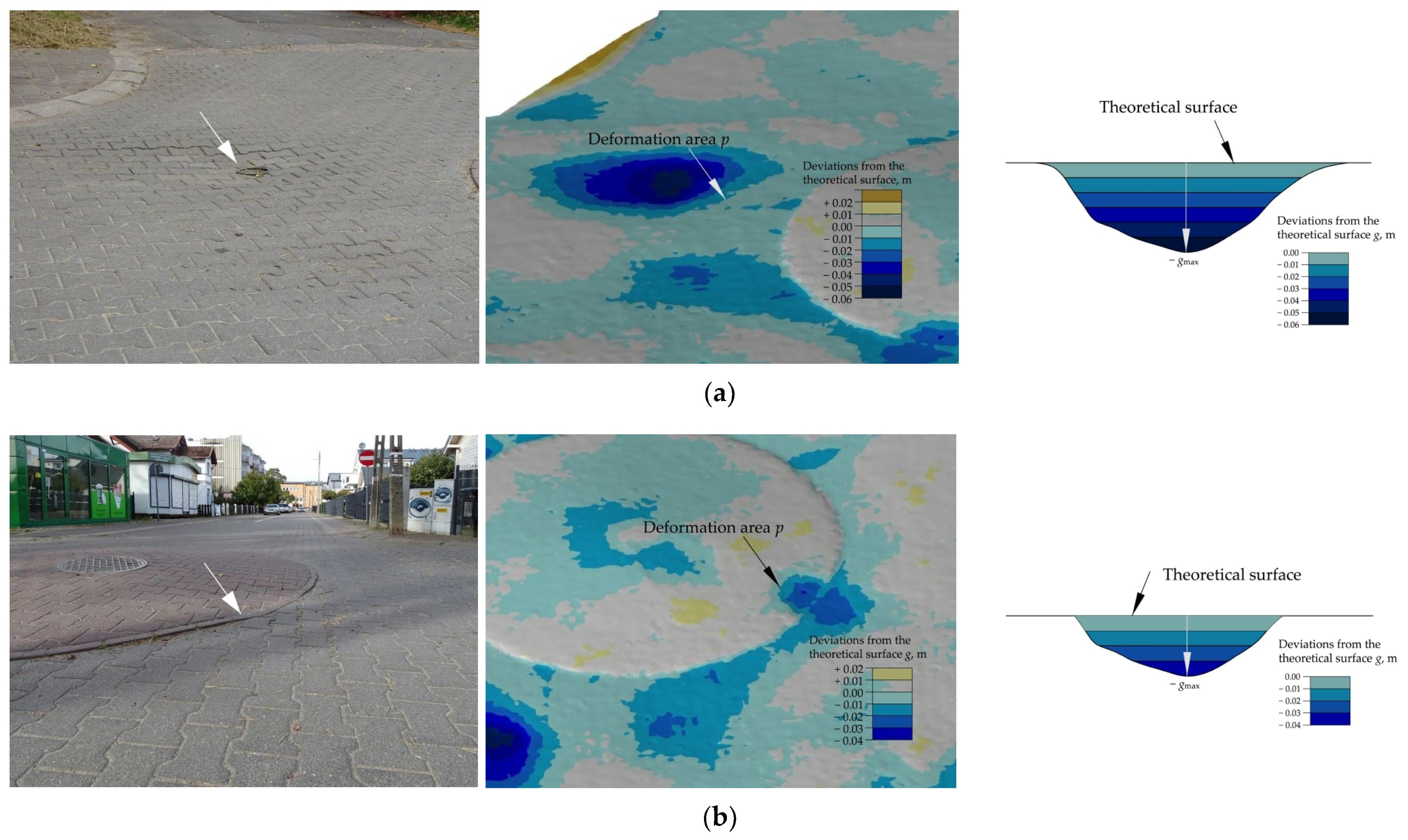
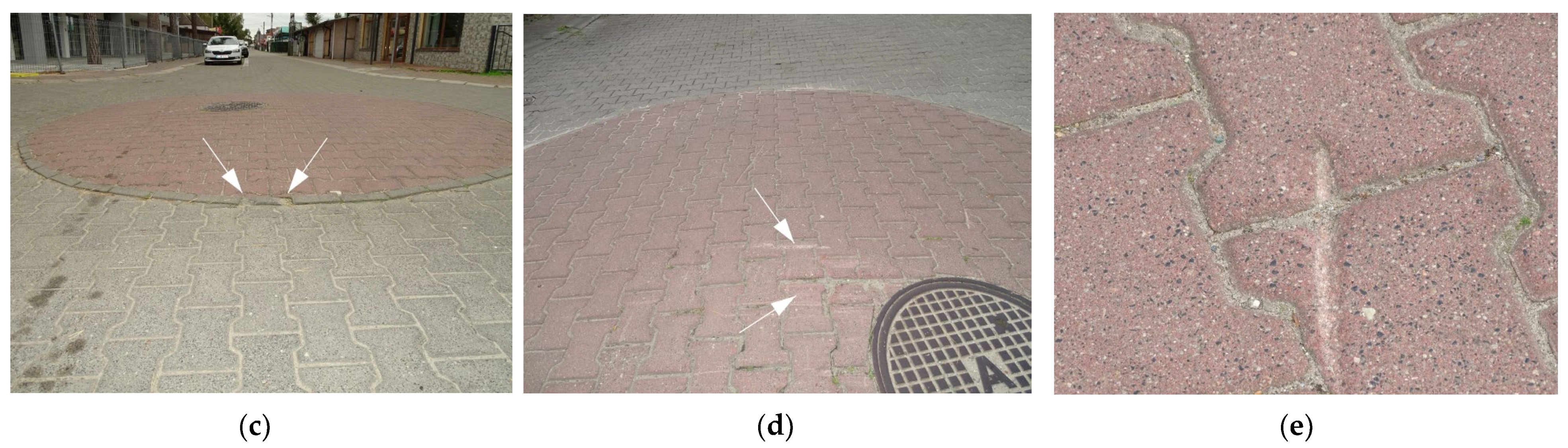
2.2. Road Surface Deformation Measurement Using 3D Scanning Method
2.3. Traffic Volume and Speed Surveys
2.4. Horizontal Forces Estimation
3. Results
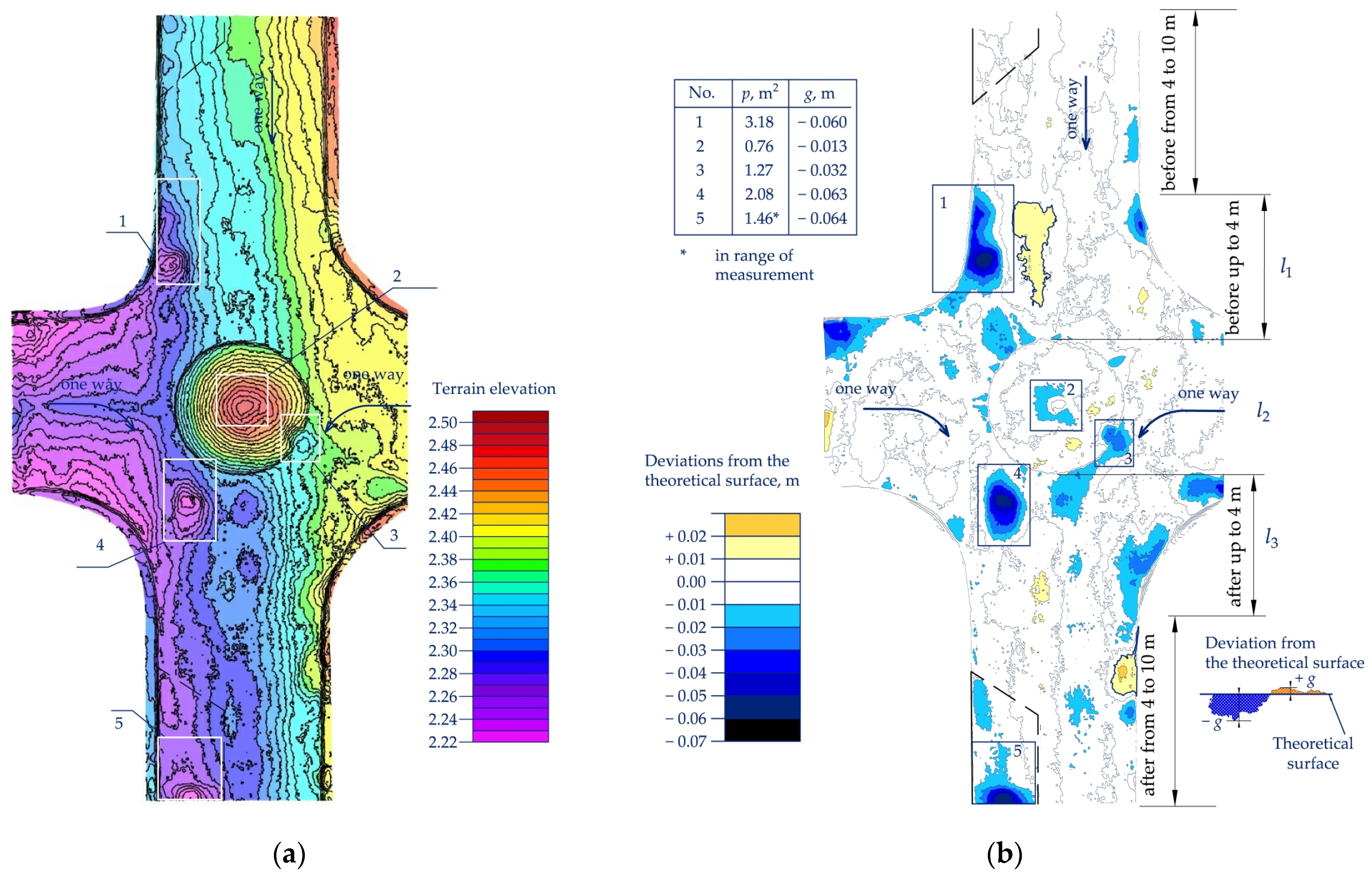
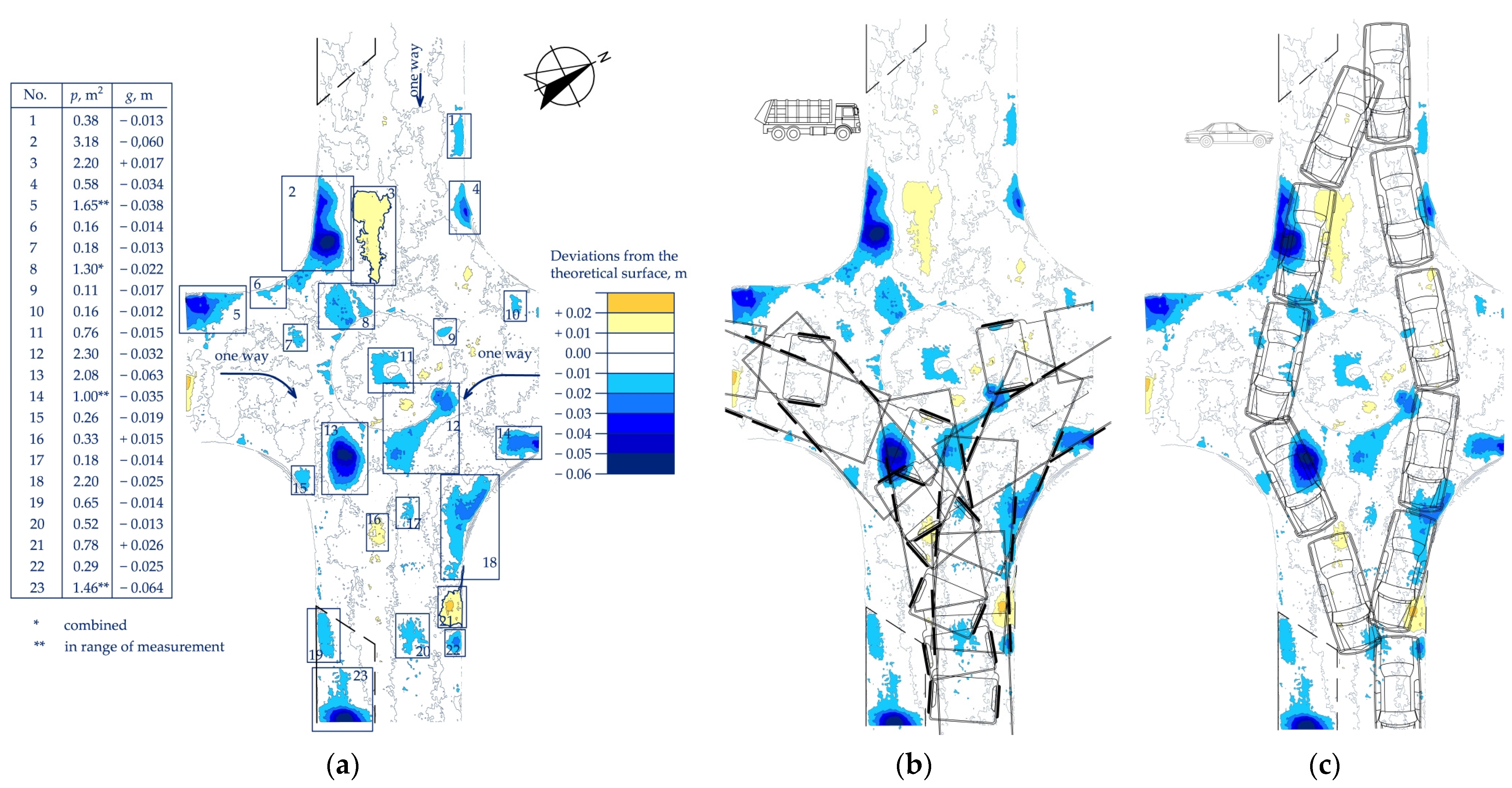
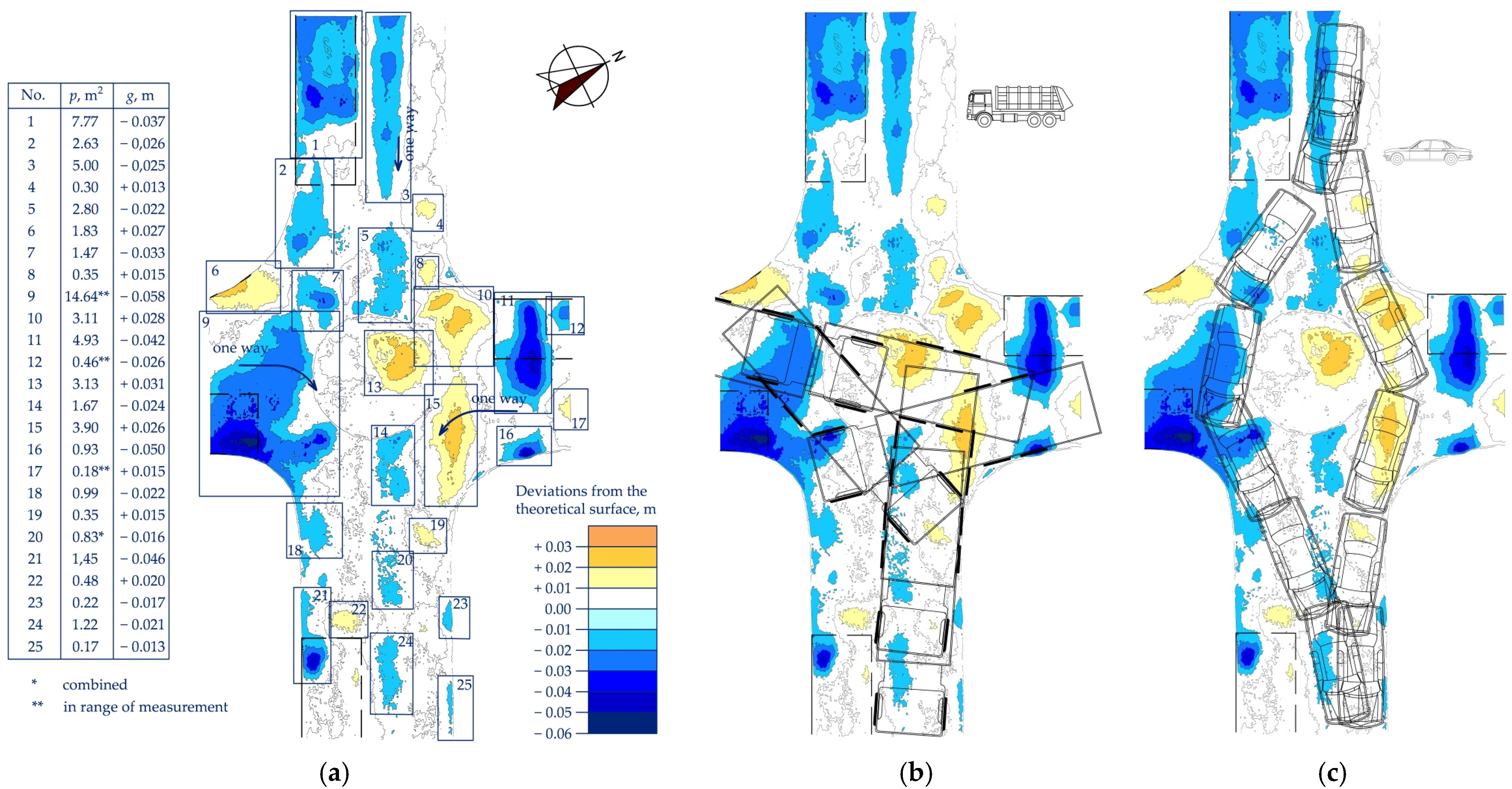
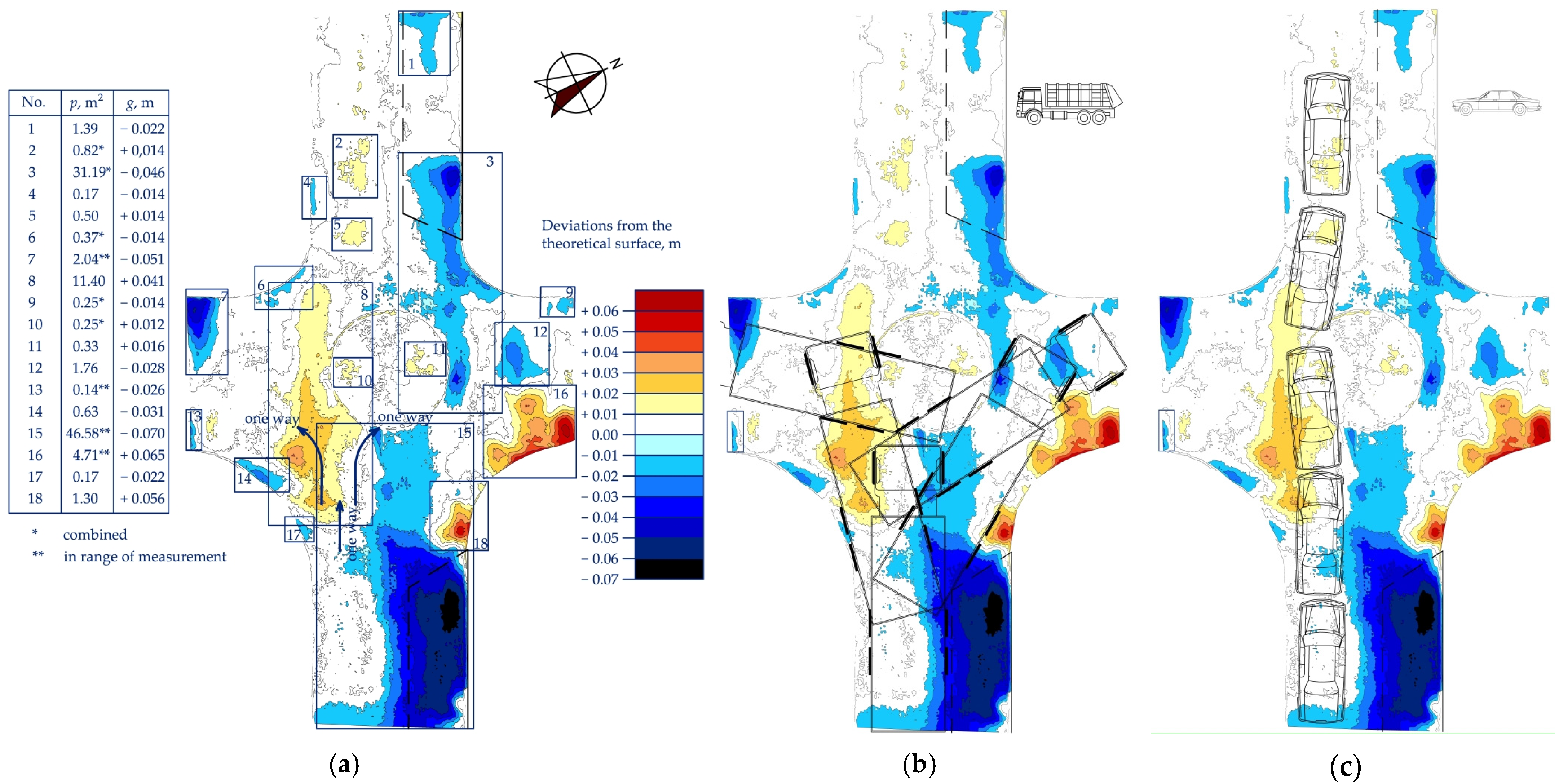
3.1. DM3D Models Representing the Deviations of the Real Surface from the Theoretical Surface and the Swept Paths of the Selected Design Vehicles
3.2. Passenger Car Observations during the Surveys
- -
- Parking lane locations on the respective junction legs,
- -
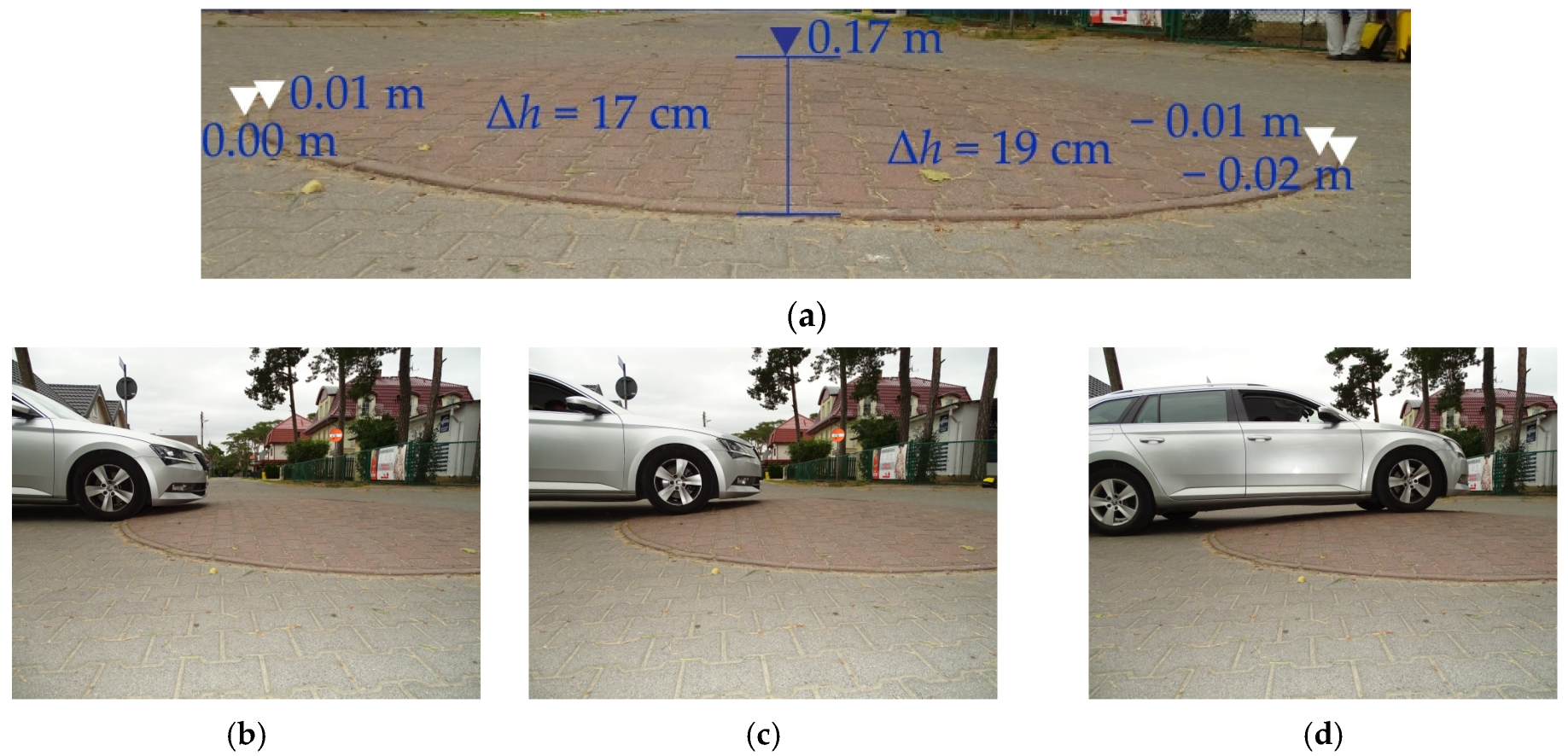
- Junction streetscape and appropriate central island ∆h value,
- -
- Turning movements planned for the junction in question, including design vehicle’s swept path analysis,
- -
- Pavement structure design appropriate to the outcome of the above analyses.
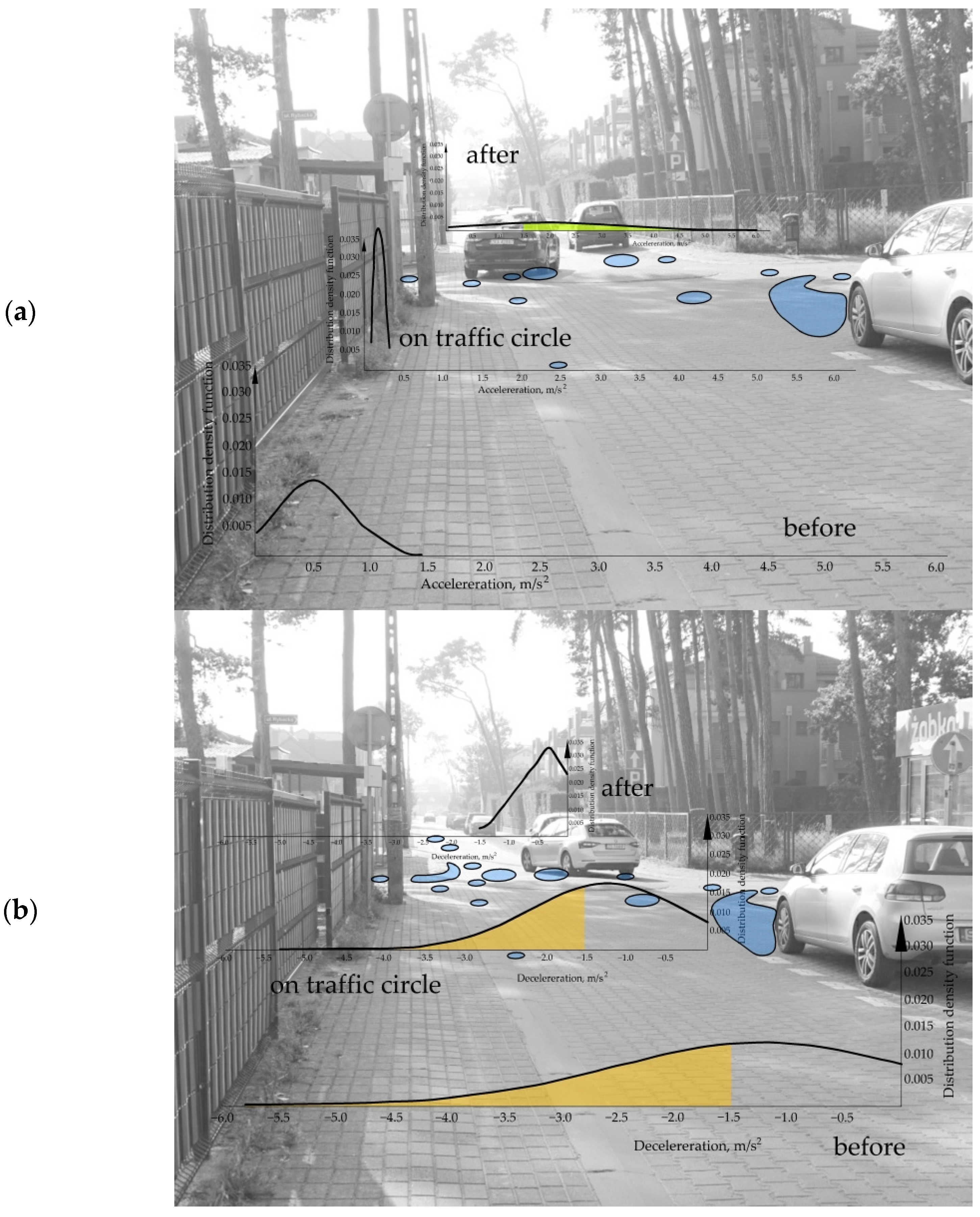
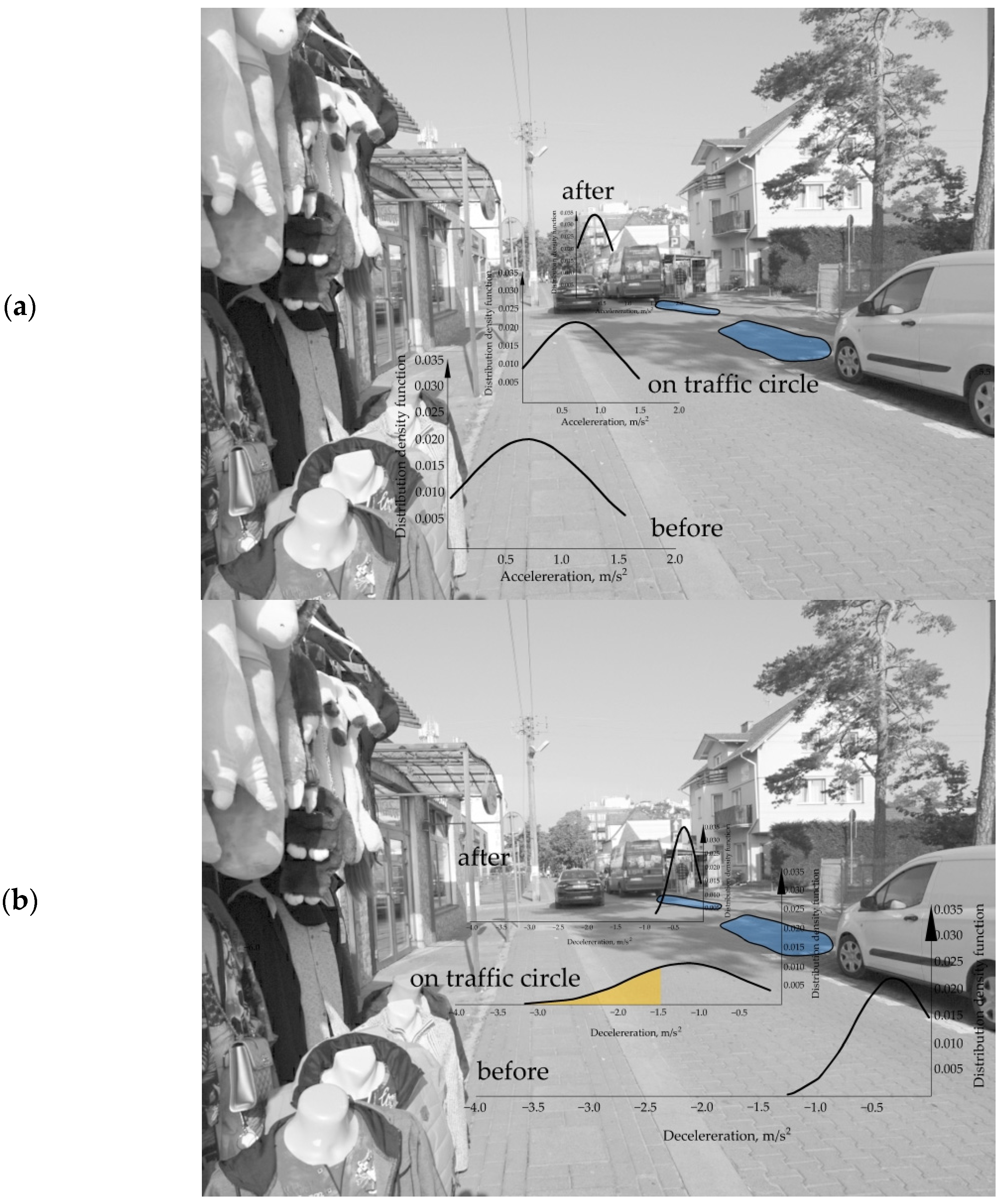
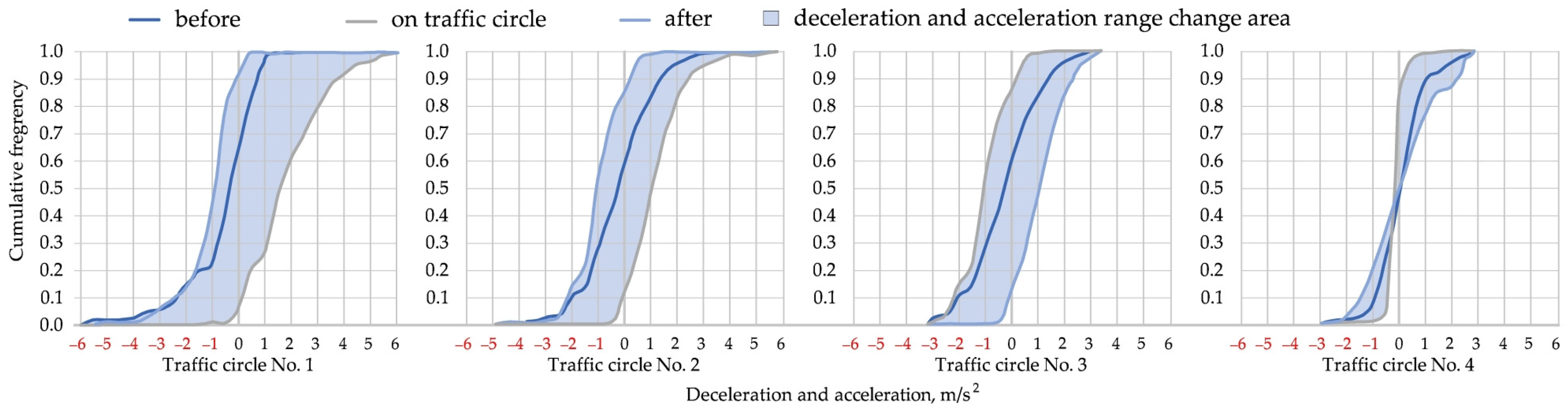
3.3. Traffic Survey Results
4. Discussion
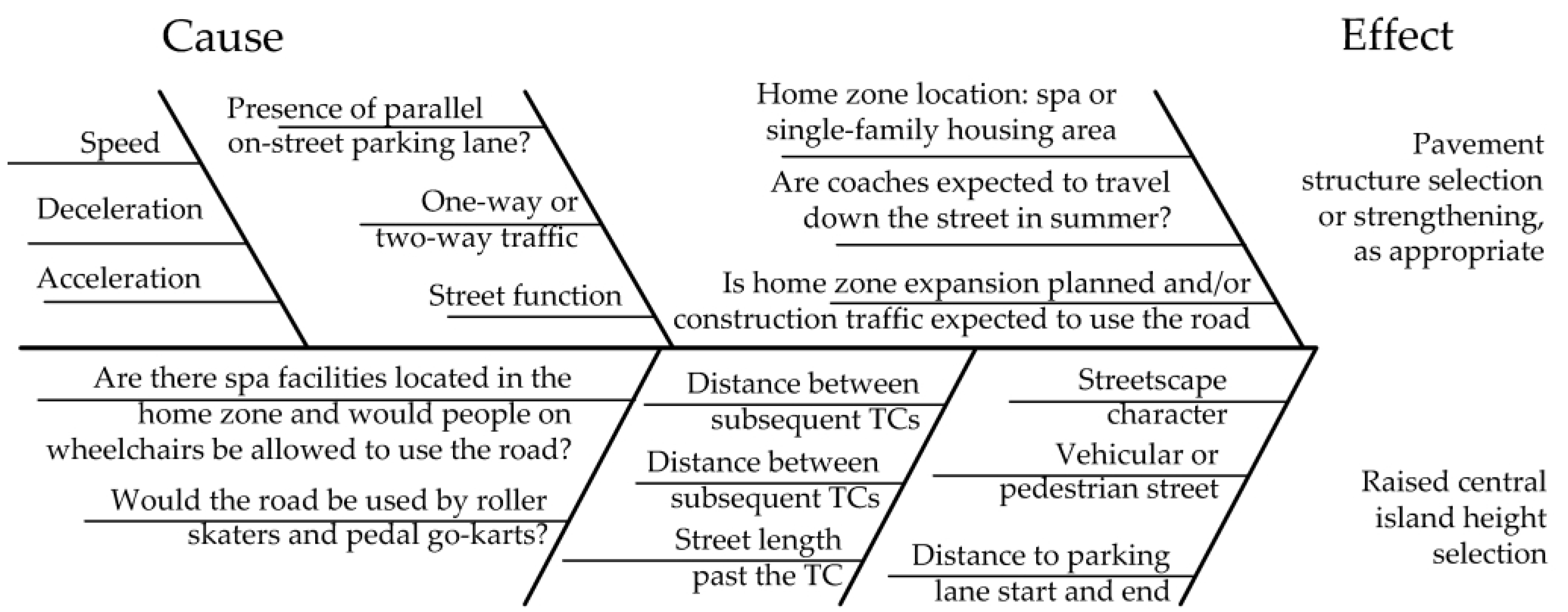
4.1. Cause and Effect Analysis Using the Cause and Effect Diagram and Pareto Chart
- -
- The combined effect of the street function (Figure 2), in this case a street designed for vehicular traffic (1), with due consideration of the streetscape characteristics around the traffic circle (2) and the length of the section between the analysed traffic circles with no side obstacles, such as cars present in the parallel on-street parking lane (3);
- -
- The combined effect of driving much higher above the home zone speed limit in a one-way street beyond the season (4), as reported by Majer and Sołowczuk [5], and a short terminal section of the street at the home zone exit (5);
- -
- High-profile characteristic of the street (Figure 2), where in this case, the main promenade is lined with numerous food outlets, boutiques and shops (6);
- -
- Side obstacles installed at the parking lane’s beginning and end (7) (concrete flowerbeds, vegetated splitter islands, etc.);
- -
- Allowed roller skating or riding pedal go-karts in home zones located in spa areas (8);
- -
- The recommended central island ∆h limit (9).
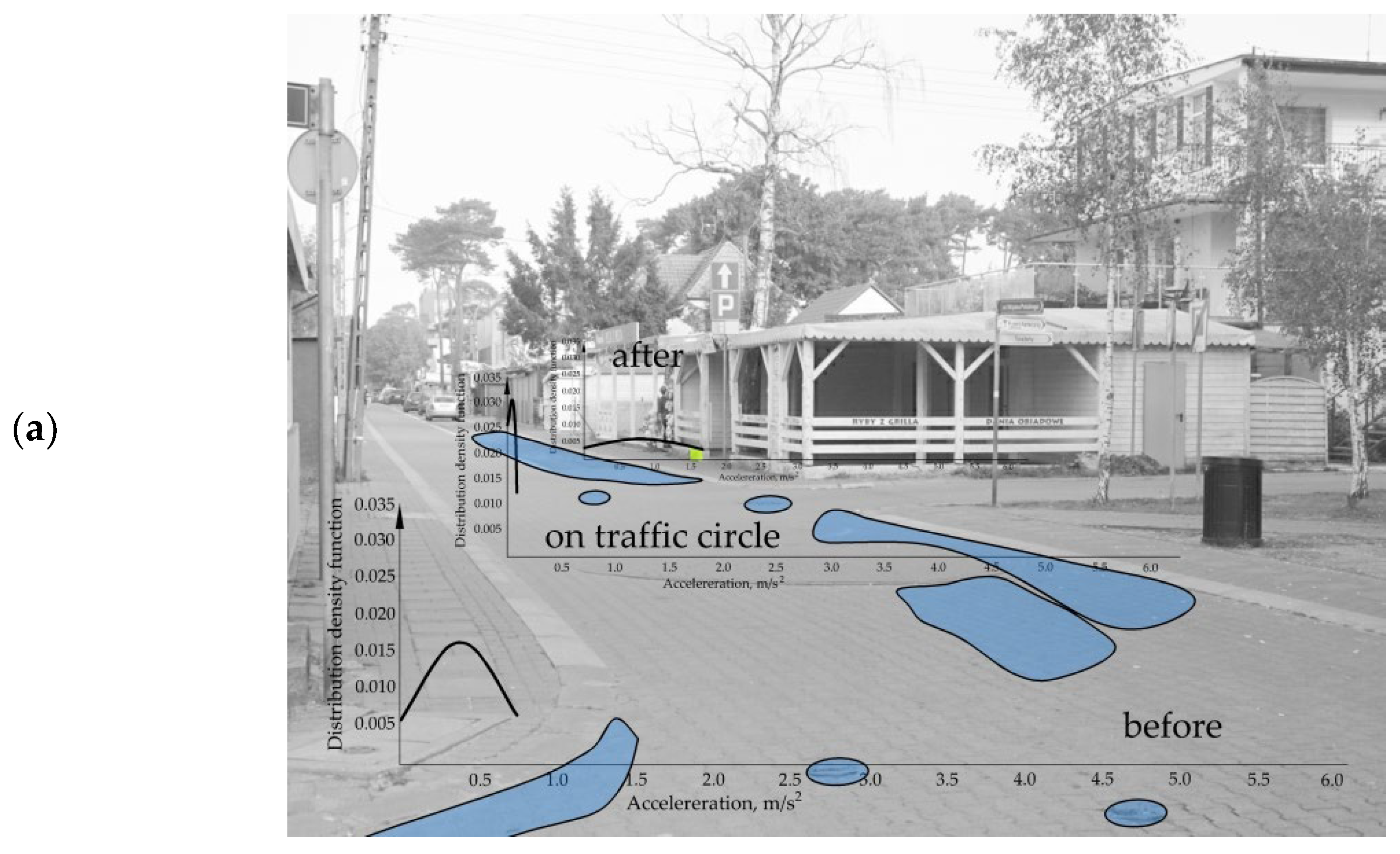
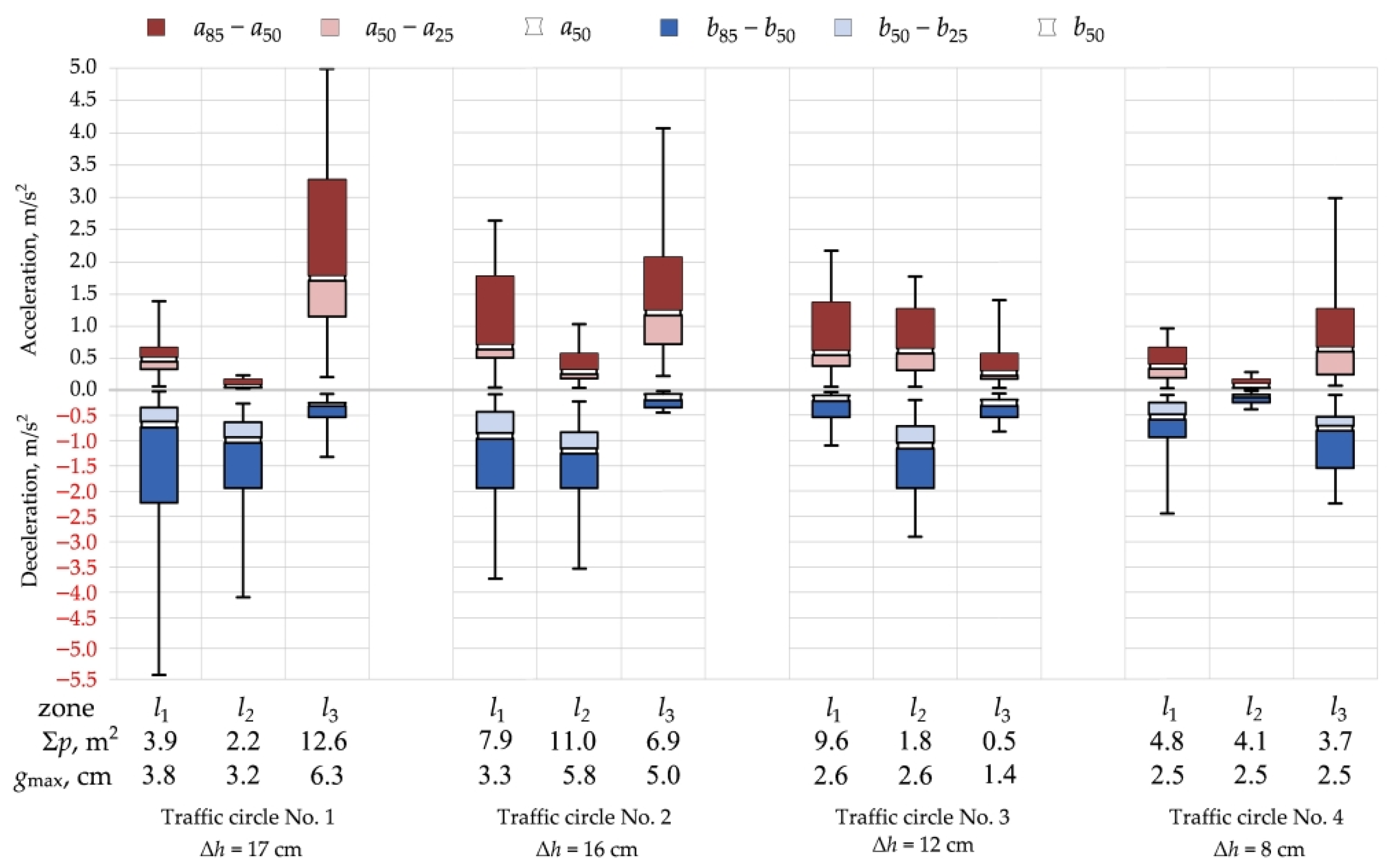
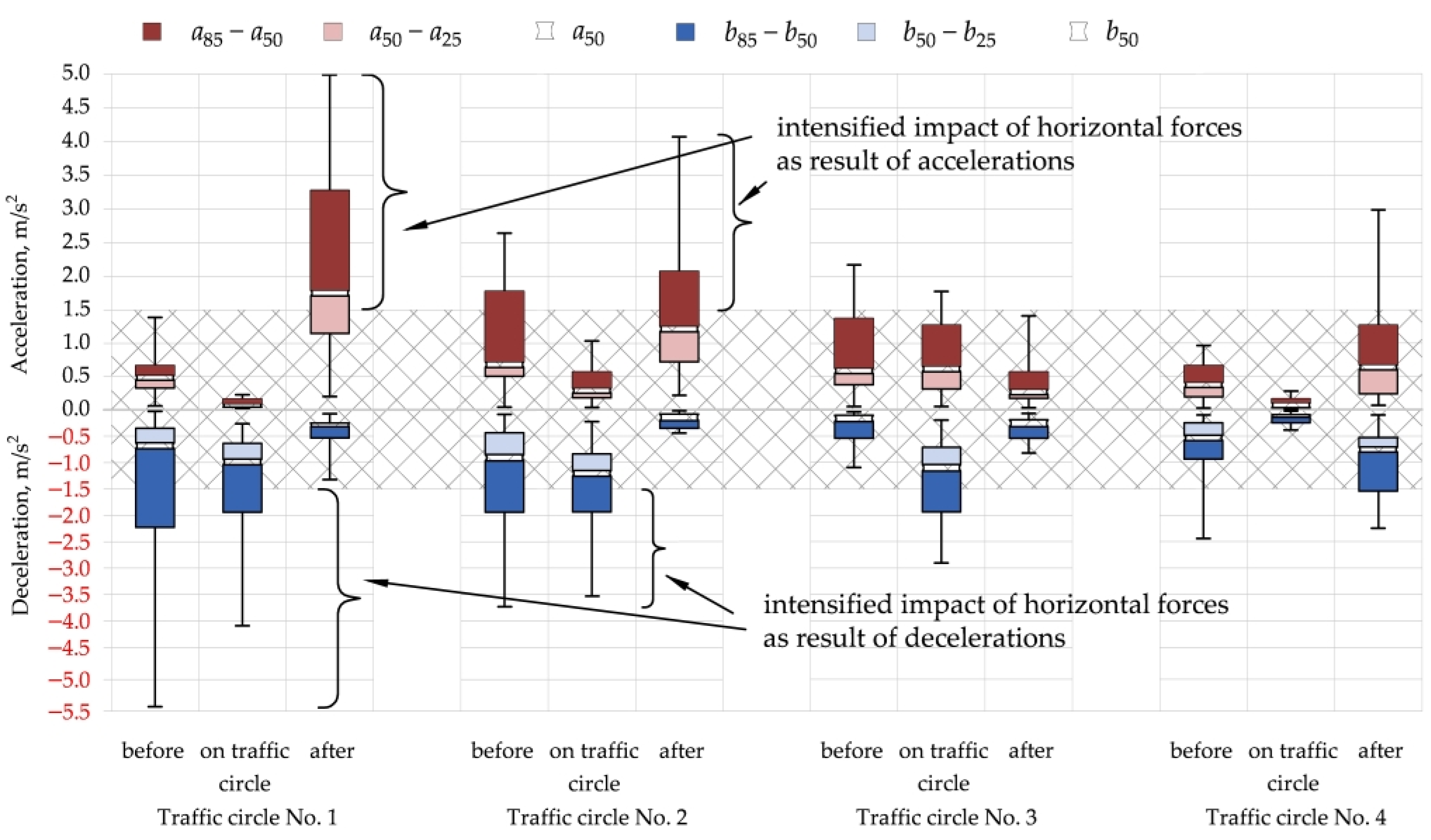
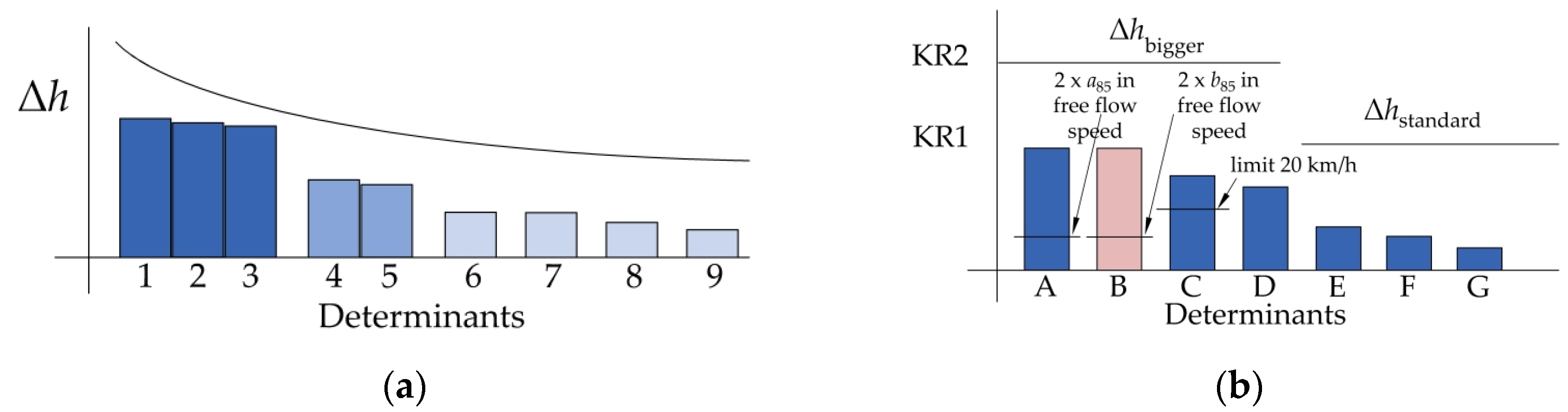
- Increased traffic impact on the road surface around a traffic circle, in relation to acceleration, at different central island ∆h values;
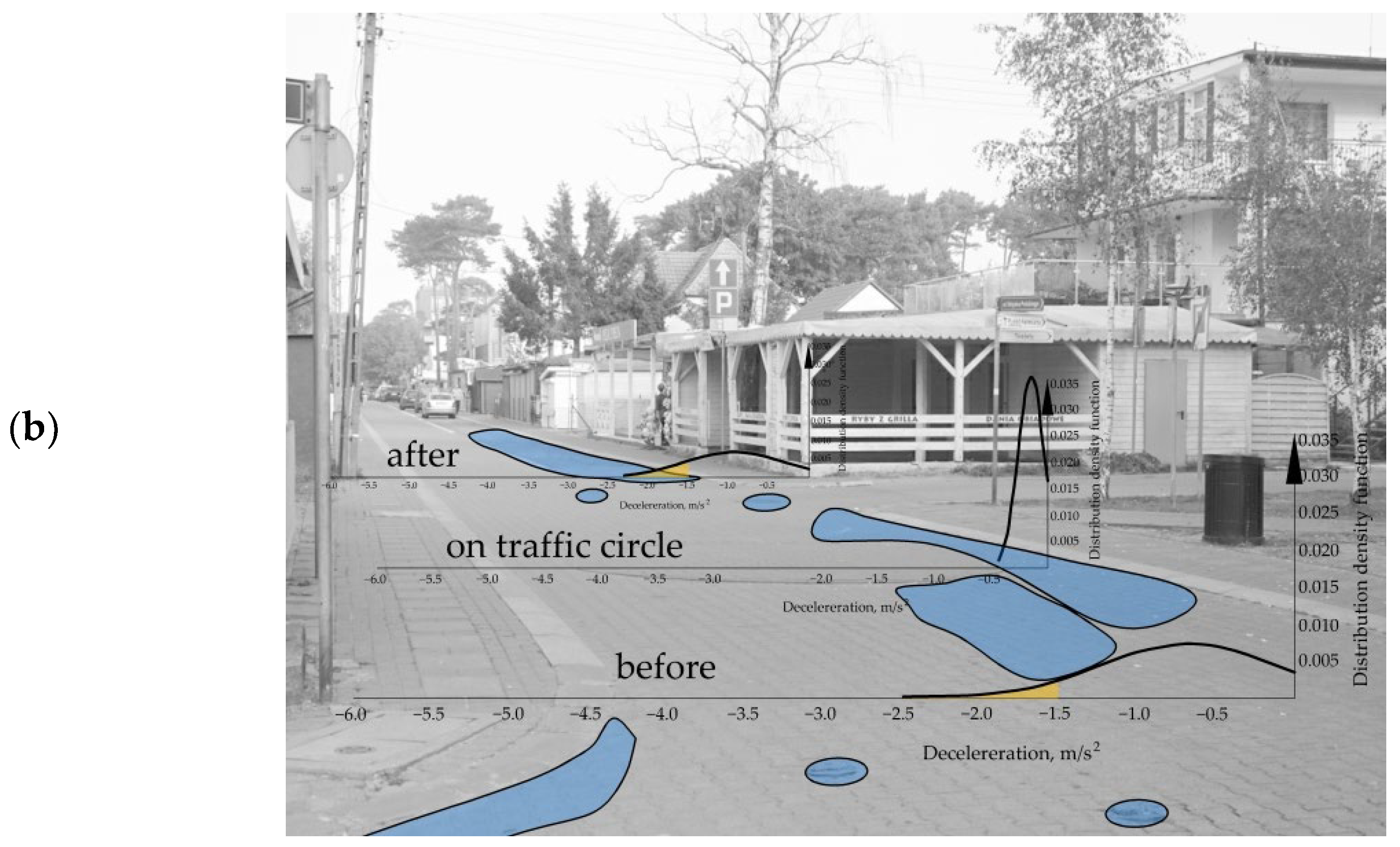
- Increased traffic impact on the road surface around a traffic circle expressed by decelerations depending on central island ∆h;
- Driving at speeds much higher than the home zone speed limit on a one-way street in periods beyond the season, as confirmed by Majer [5];
- Presence of parallel on-street parking lanes, which narrow down the apparent carriageway width when occupied by vehicles at the beginning or end, thus considerably influencing vehicle decelerations or accelerations.In the latter case of ∆hstandard, the determinants relevant to the traffic duty class adopted for pedestrian street pavement include the following:
- Placement of side obstacles, such as concrete planters, positioned at the parking lane’s beginning or end, which may narrow down the apparent carriageway width and make drivers change their driving style, resulting in slightly greater decelerations;
- Weak subgrade, requiring strengthening of the lower layers;
- Draining problems requiring incorporation of additional layers in the pavement structure.
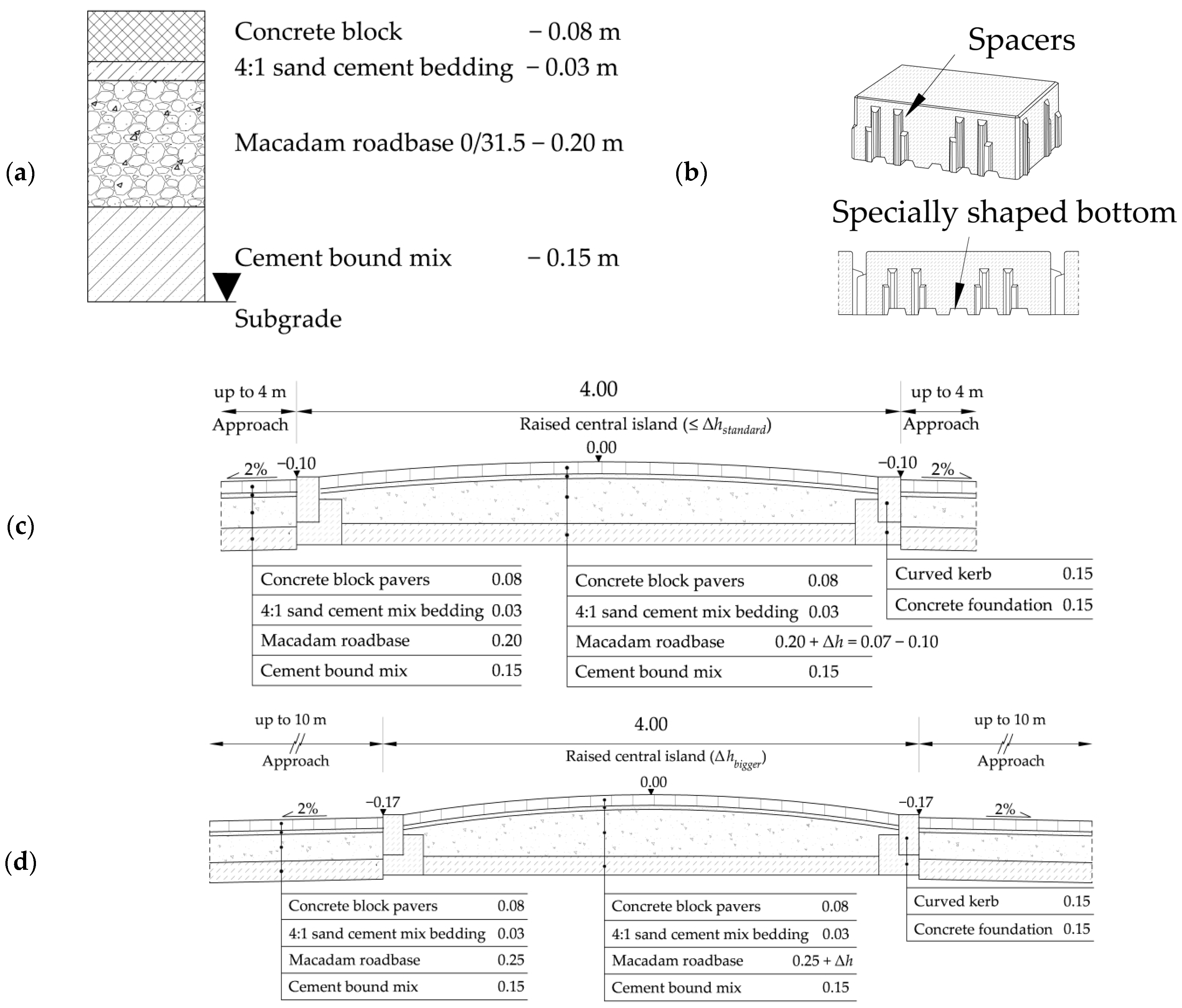
4.2. Design of Road Pavements and Their Interfaces
5. Conclusions
- -
- Sustainable pavement design for spa home zone areas should take into account the following:
- ▪
- The street function,
- ▪
- Traffic circle surrounding streetscape,
- ▪
- Pedestrian traffic characteristics (whether or not wheelchairs, roller skating or pedal go-karts will be allowed on the carriageway).
- -
- The height of the central island ∆h should be adjusted accordingly. The guidance provided by the relevant design guidelines and research publications is limited to recommending the height of speed humps located in normal streets. Traffic circles including a raised central island designed for home zone locations are rarely found in the existing road systems. Therefore, this article postulates to take the above factors into consideration when determining the raised central island height.
- -
- If coaches transporting holidaymakers or spa guests are expected or expansion projects are planned in the spa, according to the authors, a higher traffic duty class should be adopted in sustainable home zone design, especially on streets including raised central islands and central island ∆h > ∆hstandard. The above-mentioned factors have not been taken into account in the relevant design guidelines and publications that have been published so far. This problem is tackled in this article for the first time and is set in a broader context of the sustainable design of junctions located in home zone areas.
- -
- The pavement deterioration survey and horizontal forces calculations (based on the measured decelerations and accelerations) showed that a higher-than-standard traffic duty class should be adopted in the design of pavements in home zones located in spa areas. This higher duty class (adopted for raised central island junctions on one-way streets) should take into account the dynamic effects imposed by vehicles passing through uneven raised surfaces for both straight-through and turning movements from the side legs. These conclusions are formulated for the first time based on the swept path and pavement condition comparative analyses carried out as part of this study. There is no mention in the available design guidelines and research publications of a higher duty class requirement for pavements at raised traffic circles in home zones, which could be recommended due to a higher proportion of turning movements on one-way streets typically found in these areas.
- -
- The placement of additional side obstacle markings the on-street parking lane’s beginning and end is also recommended for these locations where the traffic conditions change throughout the year, in order to make drivers slow down in periods when the lanes are more or less empty, i.e., beyond the season.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Mei, Z.; Feng, C.; Kong, L.; Zhang, L.; Chen, J. Assessment of different parking pricing strategies: A simulation-based analysis. Sustainability 2020, 12, 2056. [Google Scholar] [CrossRef]
- Mingardo, G.; van Wee, B.; Rye, T. Urban parking policy in Europe: A conceptualization of past and possible future trends. Transp. Res. Part A Policy Pract. 2015, 74, 268–281. [Google Scholar] [CrossRef]
- VanHoose, K.; de Gante, A.R.; Bertolini, L.; Kinigadner, J.; Büttner, B. From temporary arrangements to permanent change: Assessing the transitional capacity of city street experiments. J. Urban Mobil. 2022, 2, 100015. [Google Scholar] [CrossRef]
- Jones, P.; Hervik, A. Restraining car traffic in European cities: An emerging role for road pricing. Transp. Res. Part A Policy Pract. 1992, 26, 133–145. [Google Scholar] [CrossRef]
- Majer, S.; Sołowczuk, A. Traffic Circle—An Example of Sustainable Home Zone Design. Sustainability 2023, 15, 16751. [Google Scholar] [CrossRef]
- Ustawa—Prawo o Ruchu Drogowym, Dziennik Ustaw z Dnia 20 Czerwca 1997 Nr 98 Poz. 602, z Późn. Zm. Available online: https://isap.sejm.gov.pl/isap.nsf/DocDetails.xsp?id=wdu19970980602 (accessed on 2 November 2023). (In Polish)
- Jazcilevich, A.; Vázquez, J.M.M.; Ramírez, P.L.; Pérez, I.R. Economic-environmental analysis of traffic-calming devices. Transp. Res. Part D Transp. Environ. 2015, 36, 86–95. [Google Scholar] [CrossRef]
- Lee, G.; Joo, S.; Oh, C.; Choi, K. An evaluation framework for traffic calming measures in residential areas. Transp. Res. Part D Transp. Environ. 2013, 25, 68–76. [Google Scholar] [CrossRef]
- National Association of City Transportation Officials. Urban Street Design Guide; National Association of City Transportation Officials: Washington, DC, USA, 2013. [Google Scholar]
- Vejdirektoratet-Vejregeludvalget. Urban Traffic Areas—Part 7—Speed Reducers; Vejdirektoratet-Vejregeludvalget: Copenhagen, Denmark, 1991. [Google Scholar]
- Devon County Council Engineering & Planning Department. Traffic Calming Guidelines; Devon County Council Engineering & Planning Department: Devon, UK, 1992.
- East Ayrshire, Strathclyde Regional Council. Roads Development Guide; East Ayrshire, Strathclyde Regional Council: London, UK, 2010.
- Road and Transportation Research Association. Directives for the Design of Urban Roads. RASt 06; Road and Transportation Research Association, Working Group Highway Design, FGSV: Köln, Germany, 2006. [Google Scholar]
- Faheem, H. Suitability of existing traffic calming measures for use on some highways in Egypt. In Proceedings of the 9th International Conference on Civil and Architecture Engineering, Cairo, Egypt, 29–31 May 2012. [Google Scholar] [CrossRef]
- Loprencipe, G.; Moretti, L.; Pantuso, A.; Banfi, E. Raised pedestrian crossings: Analysis of their characteristics on a road network and geometric sizing proposal. Appl. Sci. 2019, 9, 2844. [Google Scholar] [CrossRef]
- Pérez-Acebo, H.; Ziółkowski, R.; Linares-Unamunzaga, A.; Gonzalo-Orden, H. A Series of Vertical Deflections, a Promising Traffic Calming Measure: Analysis and Recommendations for Spacing. Appl. Sci. 2020, 10, 3368. [Google Scholar] [CrossRef]
- Distefano, N.; Leonardi, S. Evaluation of the benefits of traffic calming on vehicle speed reduction. Civ. Eng. Archit. 2019, 7, 200–214. [Google Scholar] [CrossRef]
- Balant, M.; Lep, M. Comprehensive traffic calming as a key element of sustainable urban mobility plans-impacts of a neighbourhood redesign in Ljutomer. Sustainability 2020, 12, 8143. [Google Scholar] [CrossRef]
- Wirksamkeit Geschwindigkeitsdämpfender Maßnahmen Außerorts; Hessisches Landesamt für Straßen- und Verkehrswesen: Hessen, Germany. 1997. Available online: https://docplayer.org/57666796-Wirksamkeit-geschwindigkeitsdaempfender-massnahmen.html (accessed on 2 August 2020).
- Rokade, S.; Kumar, R.; Rokade, K.; Dubey, S.; Vijayawargiya, V. Assessment of effectiveness of vertical deflection type traffic calming measures and development of speed prediction models in urban perspective. Int. J. Civ. Eng. Technol. (IJCIET) 2017, 8, 1135–1146. Available online: https://iaeme.com/MasterAdmin/Journal_uploads/IJCIET/VOLUME_8_ISSUE_5/IJCIET_08_05_120.pdf (accessed on 14 June 2023).
- Mohammadipour, A.; Archilla, A.R.; Papacostas, C.S.; Alavi, S.H. Pedestrian (RPC) Influence on Speed Reduction. In Proceedings of the Transportation Research Board (TRB) 91st Annual Meeting, Washington, DC, USA, 22–26 January 2012; Available online: https://www.researchgate.net/publication/273687736_Pedestrian_RPC_Influence_on_Speed_Reduction (accessed on 14 May 2023).
- Ziółkowski, R. Zachowania Kierowców Pojazdów w Otoczeniu Środków Uspokojenia Ruchu w Warunkach Miejskich. Habilitation Thesis, Oficyna Wydawnicza Politechniki Białostockiej, Białystok, Poland, 2022. (In Polish). [Google Scholar]
- Gaca, S.; Alenowicz, J.; Dołżycki, B.; Jaskuła, P.; Mackiewicz, P.; Stienss, M.; Szydło, A. Katalog Typowych Konstrukcji Nawierzchni Jezdni Przeznaczonych do Ruchu Bardzo Lekkiego Oraz Innych Elementów Dróg WR-D-63; Ministerstwo Infrastruktury: Warsaw, Poland, 2022. (In Polish)
- Zapata, C.E.; Andrei, D.; Witczak, M.W.; Houston, W.N. Incorporation of Environmental Effects in Pavement Design. Road Mater. Pavement Des. 2007, 8, 667–693. [Google Scholar] [CrossRef]
- Juran, J.M.; Gryna, F.M. Juran’s Quality Control Handbook, 6th ed.; McGraw-Hill: New York, NY, USA, 2010. [Google Scholar]
- Ishikawa, K.; Loftus, J.H. Introduction to Quality Control, 3rd ed.; 3A Corporation: Tokyo, Japan, 1990. [Google Scholar]
- Ishikawa, K. Introduction to Quality Control; Taylor & Francis: Philadelphia, PA, USA, 1990. [Google Scholar]
- Ishikawa, K. What is Total Quality Control? The Japanese Way; Prentice-Hall Direct: Lansing, MI, USA, 1985. [Google Scholar]
- Majer, S.; Sołowczuk, A. Traffic calming measures and their slowing effect on the pedestrian refuge approach sections. Sustainability 2023, 15, 15265. [Google Scholar] [CrossRef]
- Azam, A.; Alshehri, A.H.; Alharthai, M.; El-Banna, M.M.; Yosri, A.M.; Beshr, A.A.A. Applications of Terrestrial Laser Scanner in Detecting Pavement Surface Defects. Processes 2023, 11, 1370. [Google Scholar] [CrossRef]
- Kim, M.-K.; Sohn, H.; Chang, C.-C. Localization and Quantification of Concrete Spalling Defects Using Terrestrial Laser Scanning. J. Comput. Civ. Eng. 2015, 29, 04014086. [Google Scholar] [CrossRef]
- Beshr, A.A.A.; Heneash, O.G.; Fawzy, H.E.-D.; El-Banna, M.M. Condition assessment of rigid pavement using terrestrial laser scanner observations. Int. J. Pavement Eng. 2021, 23, 4248–4259. [Google Scholar] [CrossRef]
- Feng, Z.; El Issaoui, A.; Lehtomäki, M.; Ingman, M.; Kaartinen, H.; Kukko, A.; Savela, J.; Hyyppä, H.; Hyyppä, J. Pavement Distress Detection Using Terrestrial Laser Scanning Point Clouds—Accuracy Evaluation and Algorithm Comparison. ISPRS Open J. Photogramm. Remote Sens. 2021, 3, 100010. [Google Scholar] [CrossRef]
- GDDP. Katalog Typowych Konstrukcji Nawierzchni Podatnych i Półsztywnych; Generalna Dyrekcja Dróg Publicznych GDDP: Warsaw, Poland, 1997. (In Polish) [Google Scholar]
- Trimble Inc. Trimble SX10 Technical Data Sheet; Trimble Inc.: Westminster, CO, USA, 2017. [Google Scholar]
- Transportation Research Board. Highway Capacity Manual 2000; Transportation Research Board, The National Academies: Washington, DC, USA, 2000. [Google Scholar]
- Majer, S.; Sołowczuk, A. Road surface degradation reasons in case of bus isles and bus stops. In Proceedings of the Seventh International Scientific Conference on International Combustion Engines and Vehicles—MOTAUTO, Sofia, Bulgaria, 18–20 October 2000; Volume 2, pp. 122–128. [Google Scholar]
- Gardas, P.; Sołowczuk, A. Estimation of the necessary length of strengthening the pavement structure in the vicinity of a bus stop on the basis of tests carried out in a selected city. Roads Bridges-Drogi Mosty 2022, 21, 39–61. [Google Scholar] [CrossRef]
- Government Publications Sale Office, Sun Alliance House. Traffic Management Guidelines; Government Publications Sale Office, Sun Alliance House: Dublin, Ireland, 2014.
- Boile, M.; Narayanan, P.; Ozbay, K. Impact of Buses on Highway Infrastructure: Case Study for New Jersey State. Transp. Res. Rec. J. Transp. Res. Board 2003, 1841, 32–40. [Google Scholar] [CrossRef]
- Dreyer, W.; Steyn, W. Evaluation of the effect of deteriorating riding quality on bus-pavement interaction. J. S. Afr. Inst. Civ. Eng. 2015, 57, 2–8. [Google Scholar] [CrossRef]
- Fekpe, E. Pavement Damage from Transit Buses and Motor Coaches; Energy, Transportation and Environment Division, Battelle Memorial Institute: Columbus, OH, USA, 2003. [Google Scholar]
- Lithonplus GmbH & Co. KG. Profilhandbuch; Lithonplus GmbH & Co. KG: Lingenfeld, Germany, 2016. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Location | Symbol | Deceleration, m/s2 | Symbol | Acceleration, m/s2 | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| No. 1 | No. 2 | No. 3 | No. 4 | No. 1 | No. 2 | No. 3 | No. 4 | |||
| before | bmax | −5.5 * | −3.5 | −1.2 | −2.4 | amax | 1.4 | 2.7 | 2.2 | 1.0 |
| b85 | −2.3 | −2.0 | −0.6 | −1.0 | a85 | 0.7 | 1.8 | 1.4 | 0.7 | |
| bav | −1.2 | −1.1 | −0.3 | −1.0 | aav | 0.5 | 0.9 | 0.7 | 0.4 | |
| on traffic circle | bmax | −4.0 | −3.7 | −2.8 | −0.4 | amax | 0.3 | 1.0 | 1.8 | 0.3 |
| b85 | −2.0 | −2.0 | −2.0 | −0.3 | a85 | 0.2 | 0.6 | 1.3 | 0.2 | |
| bav | −1.2 | −1.3 | −1.2 | −0.4 | aav | 0.1 | 0.4 | 0.7 | 0.1 | |
| after | bmax | −1.3 | −0.4 | −0.8 | −2.2 | amax | 5.0 | 4.1 | 1.4 | 3.0 |
| b85 | −0.6 | −0.4 | −0.6 | −1.6 | a85 | 3.5 | 2.1 | 0.6 | 1.3 | |
| bav | −0.4 | −0.2 | −0.3 | −0.9 | aav | 1.9 | 1.3 | 0.4 | 0.8 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Majer, S.; Sołowczuk, A.; Kurnatowski, M. Design of Concrete Block Paving in Home Zone Traffic Circle Areas. Sustainability 2024, 16, 1973. https://doi.org/10.3390/su16051973
Majer S, Sołowczuk A, Kurnatowski M. Design of Concrete Block Paving in Home Zone Traffic Circle Areas. Sustainability. 2024; 16(5):1973. https://doi.org/10.3390/su16051973
Chicago/Turabian StyleMajer, Stanisław, Alicja Sołowczuk, and Marek Kurnatowski. 2024. "Design of Concrete Block Paving in Home Zone Traffic Circle Areas" Sustainability 16, no. 5: 1973. https://doi.org/10.3390/su16051973
APA StyleMajer, S., Sołowczuk, A., & Kurnatowski, M. (2024). Design of Concrete Block Paving in Home Zone Traffic Circle Areas. Sustainability, 16(5), 1973. https://doi.org/10.3390/su16051973