
Monitoring of Ship Operations in Seaport Areas in the Sustainable Development of Ocean–Land Connections


Abstract
1. Introduction
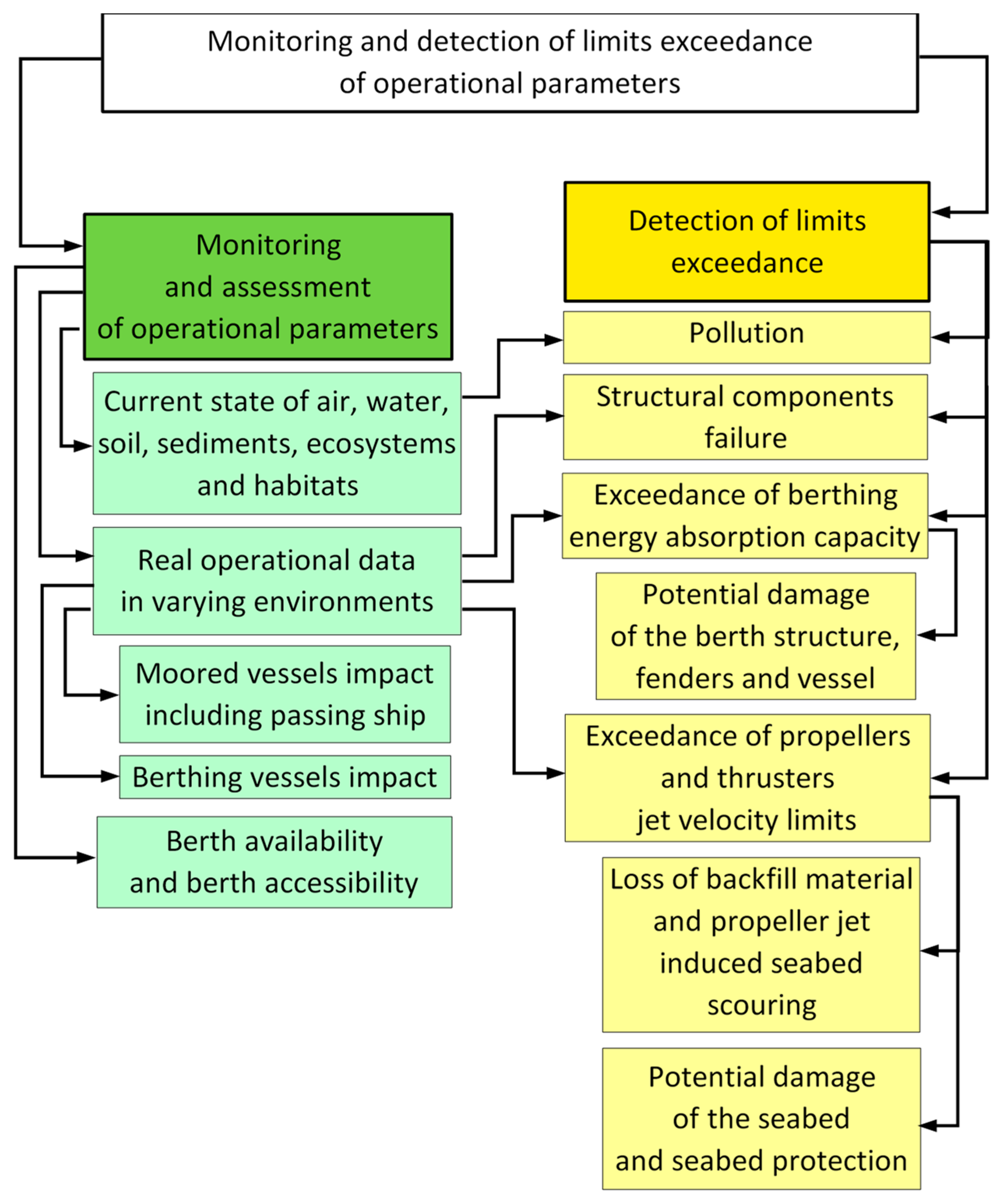
2. Prediction and Monitoring of Loads Generated by Ships on the Berth and Seabed near the Quay Wall
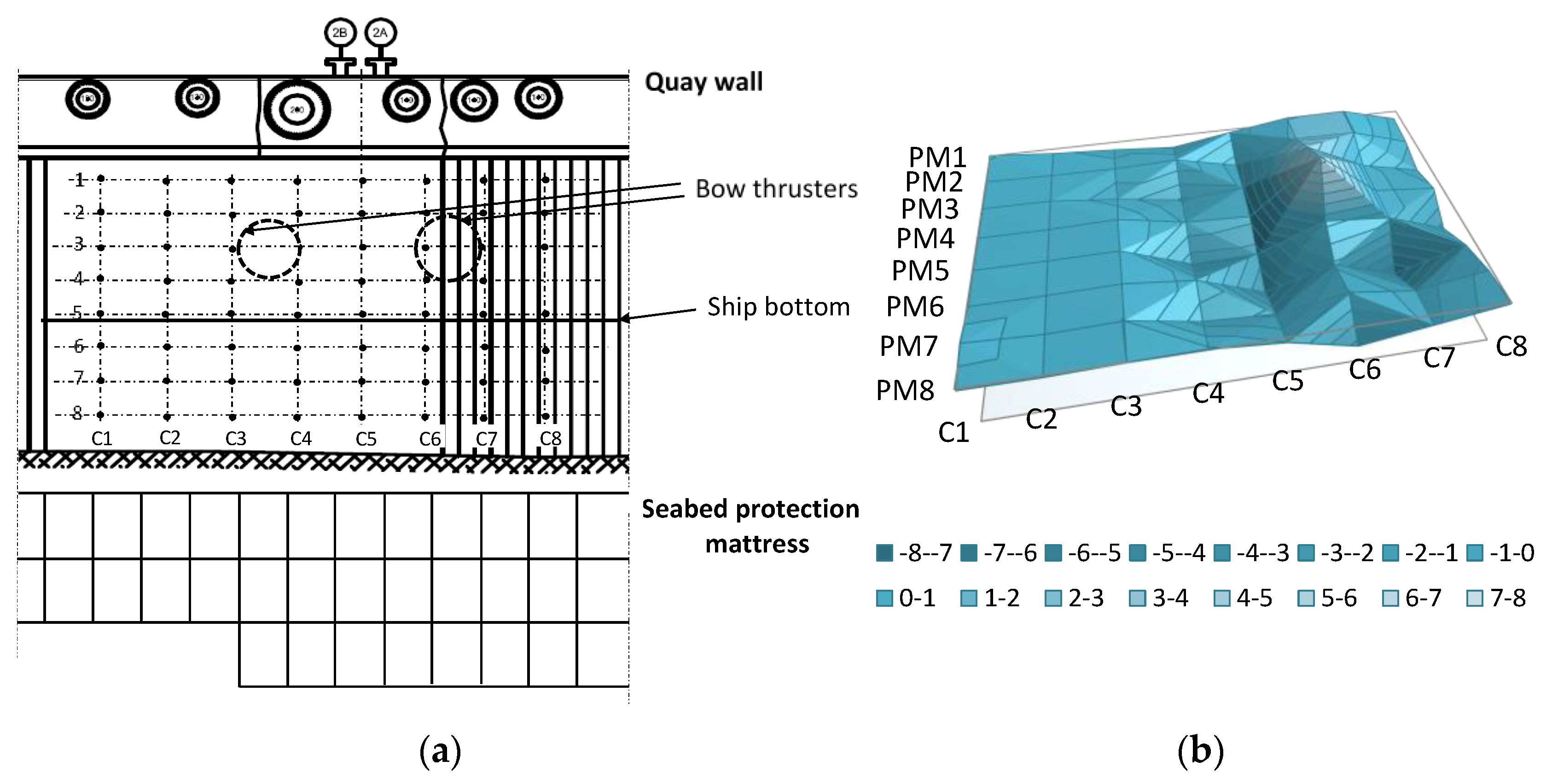
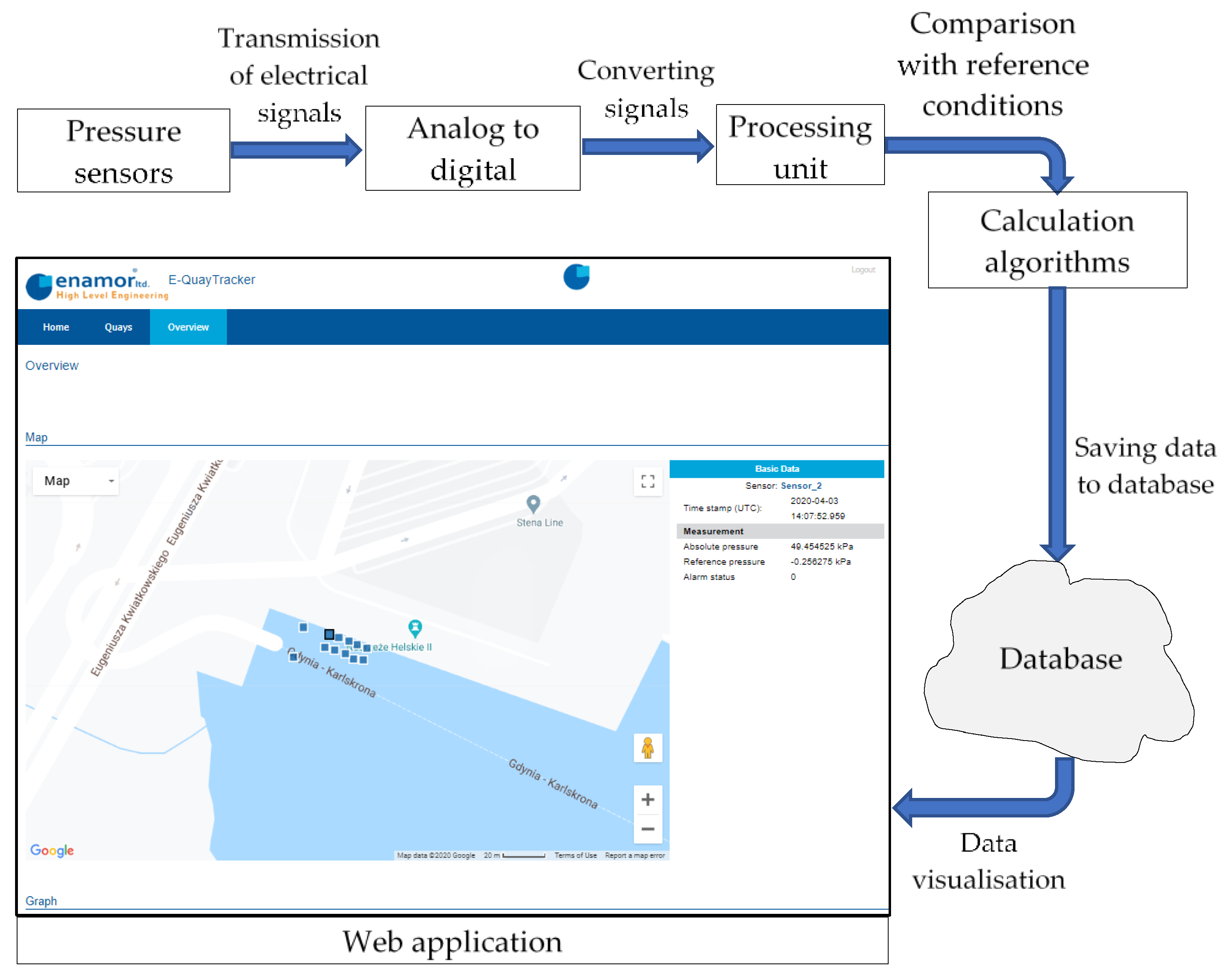
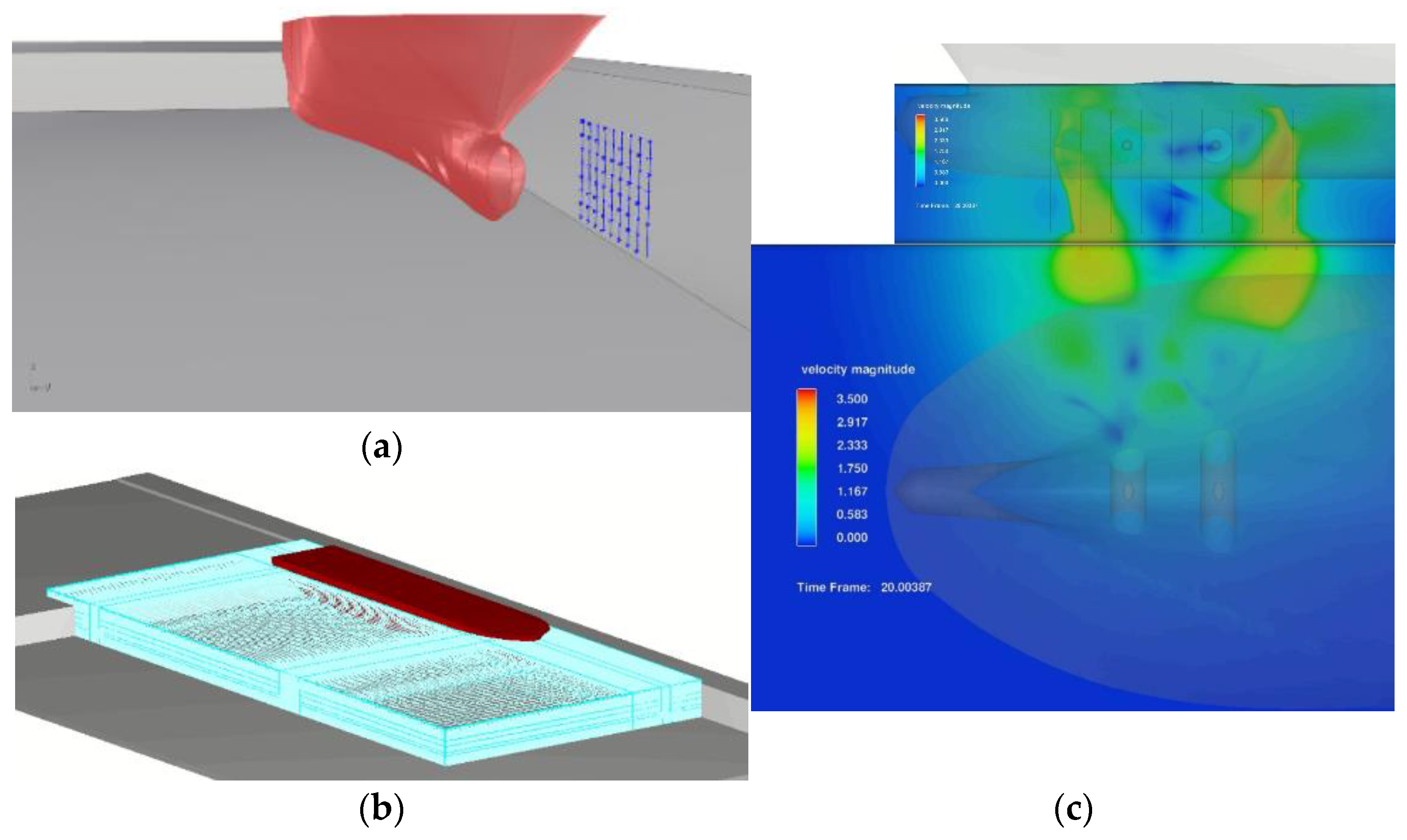
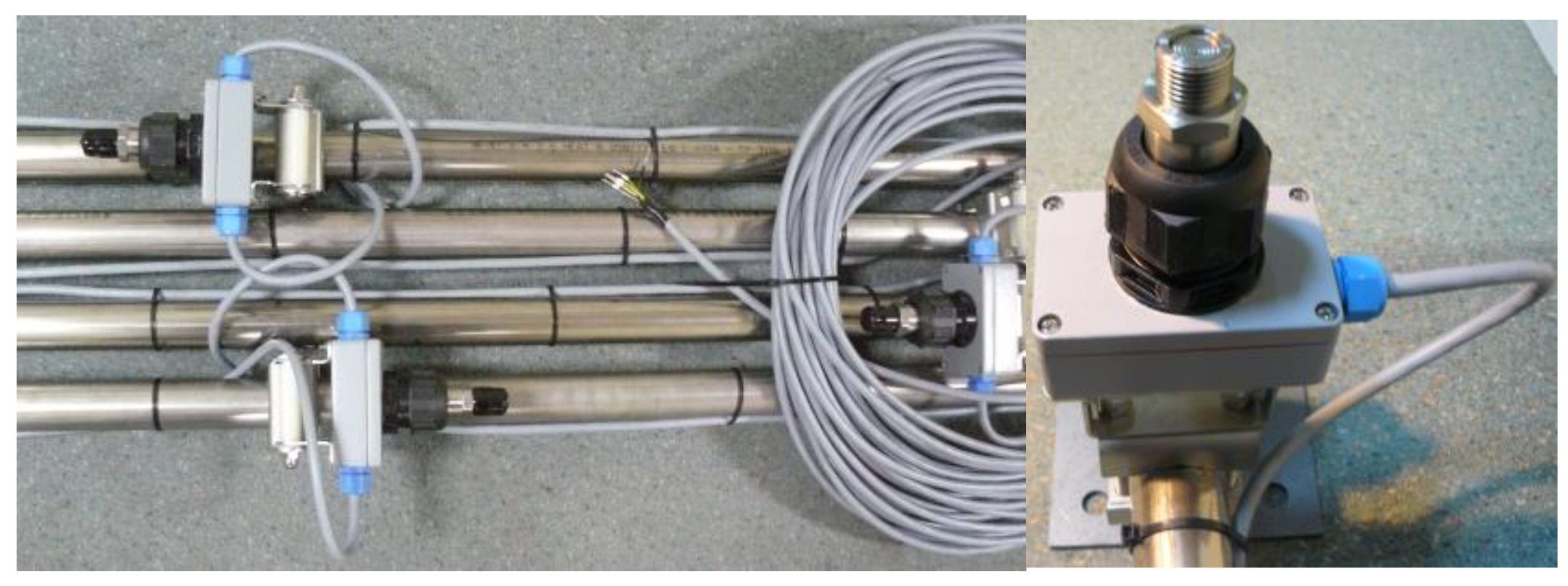
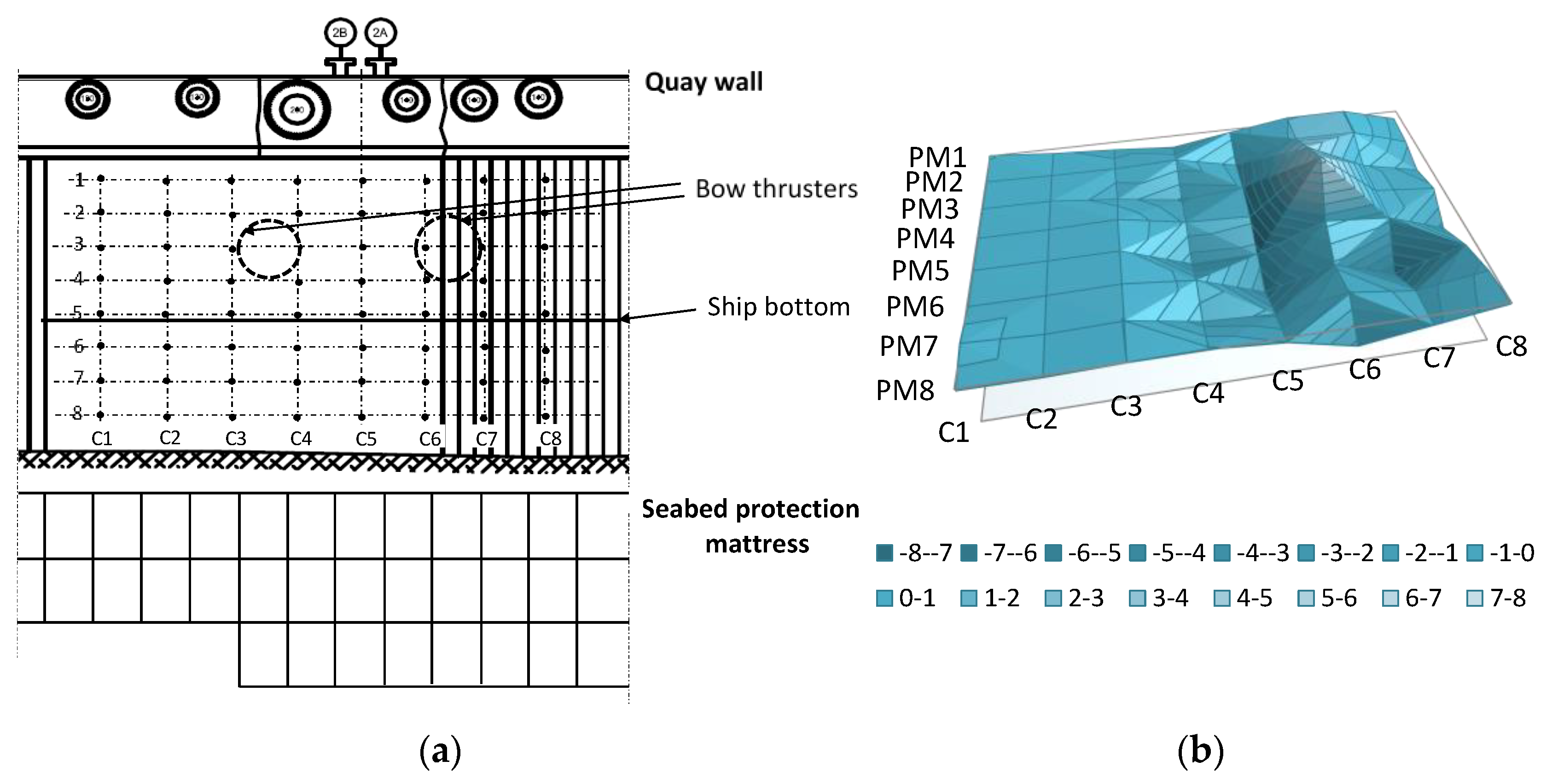
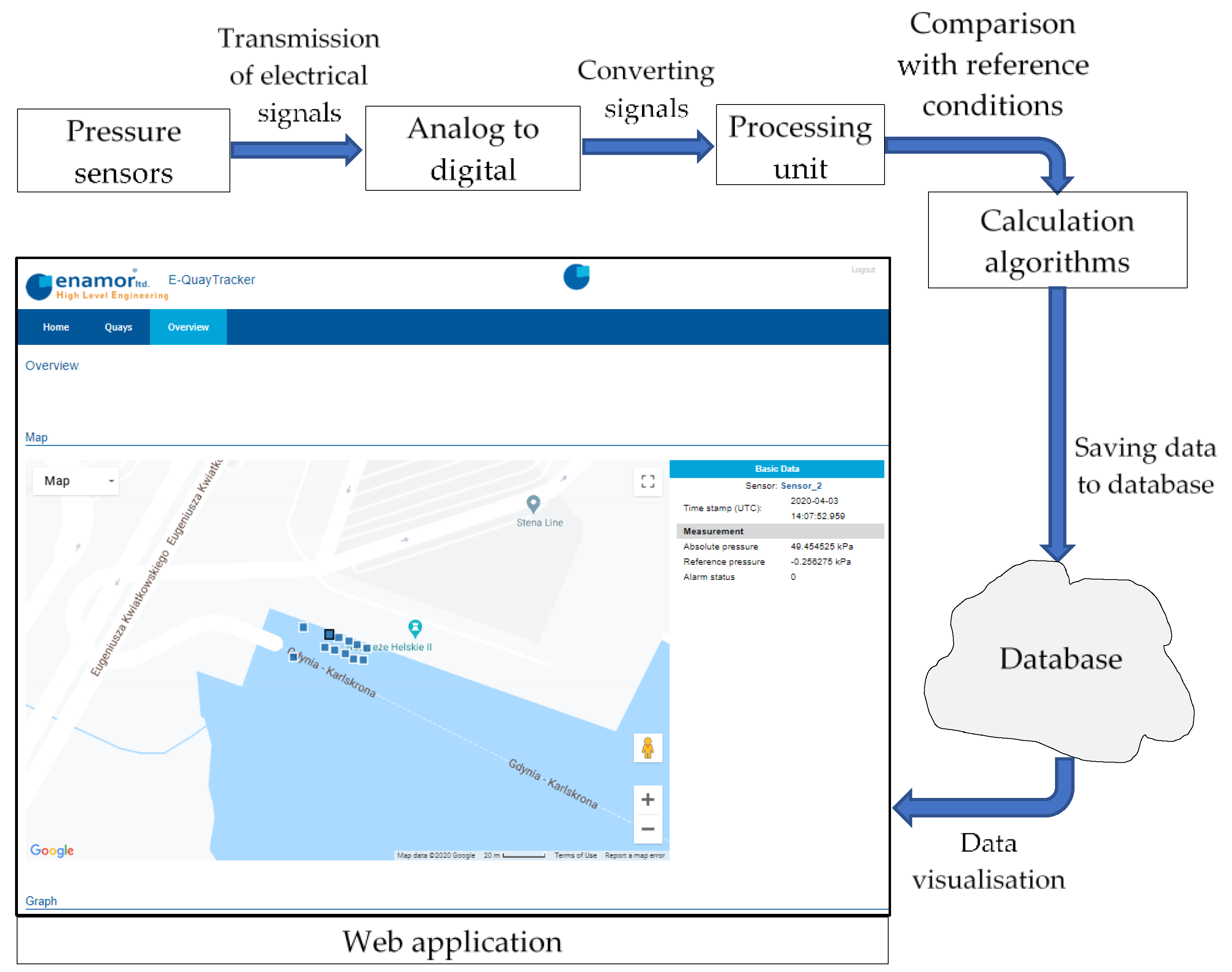
2.1. Prediction and Monitoring of Thruster and Propeller Jets’ Scouring Effects
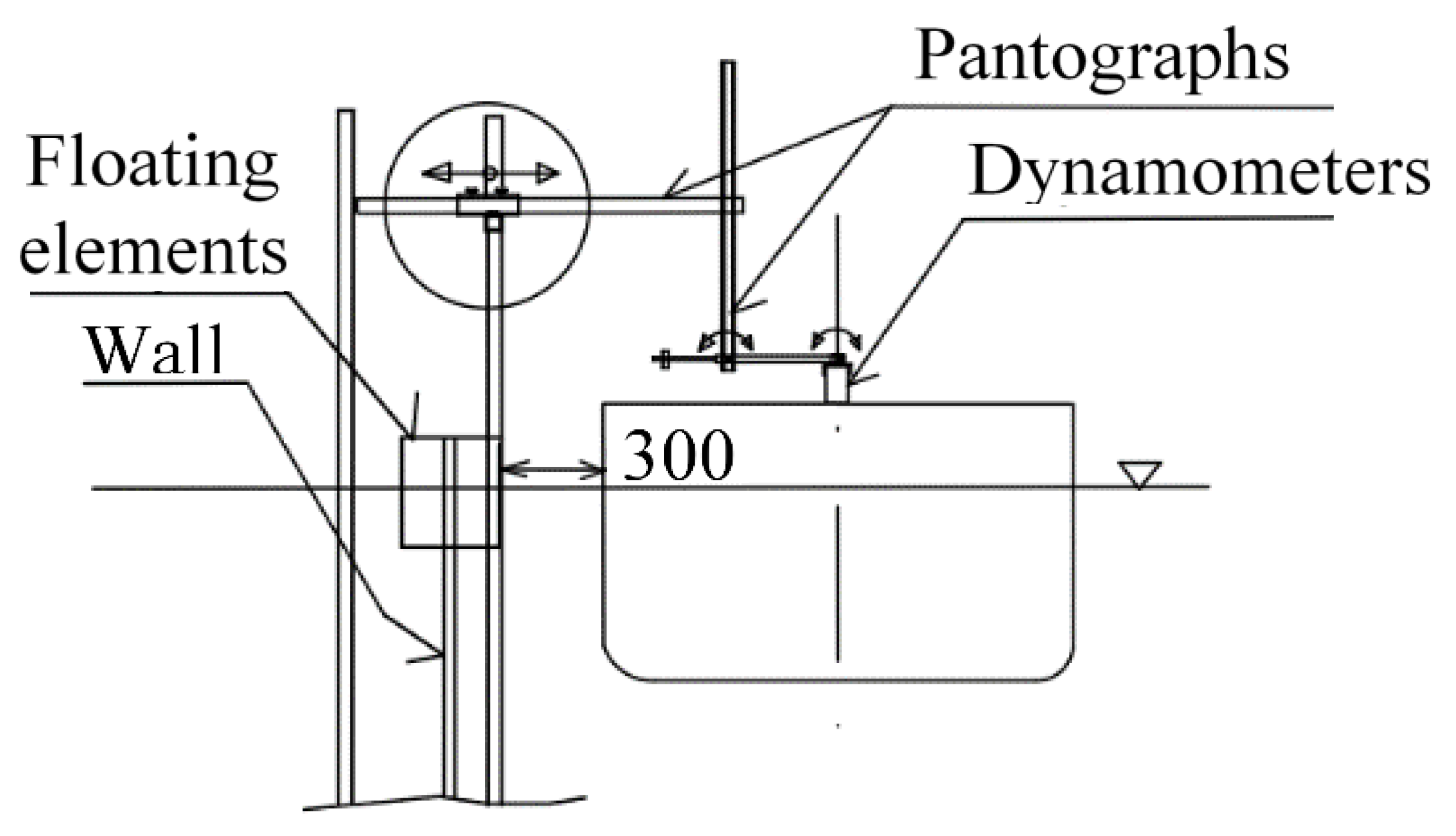
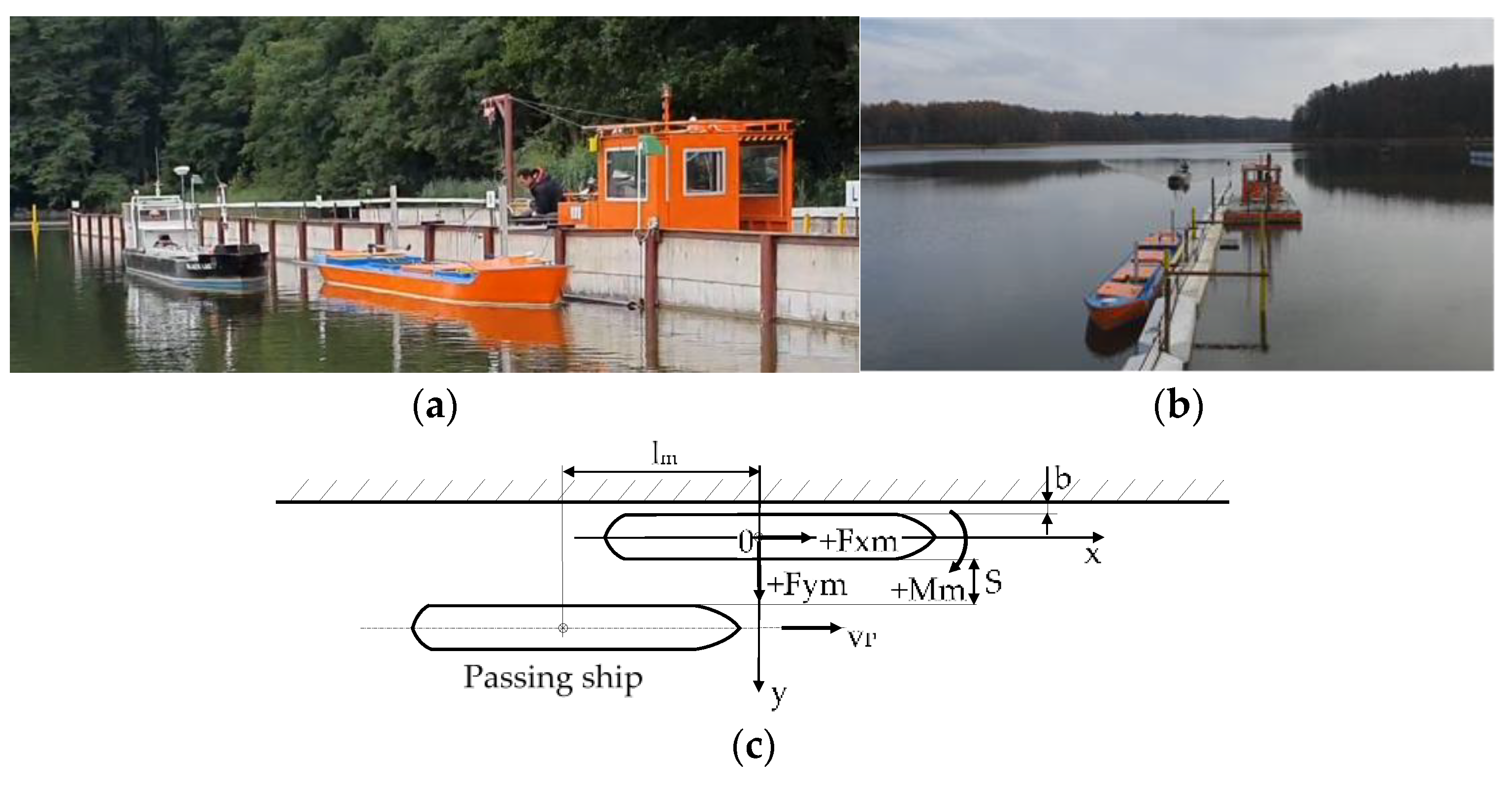
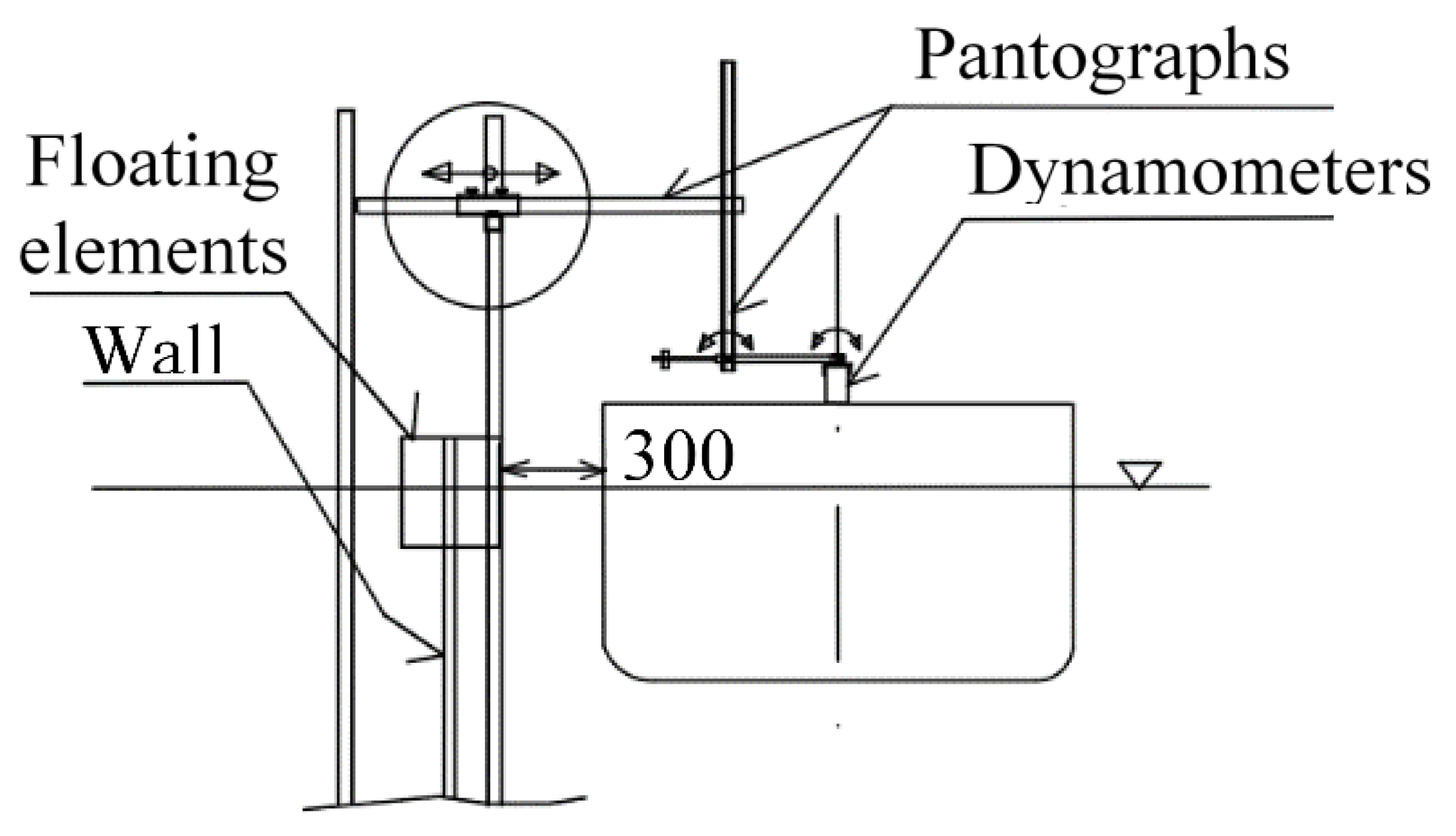
2.2. Prediction of Passing Ship Generated Loads on the Moored Ship
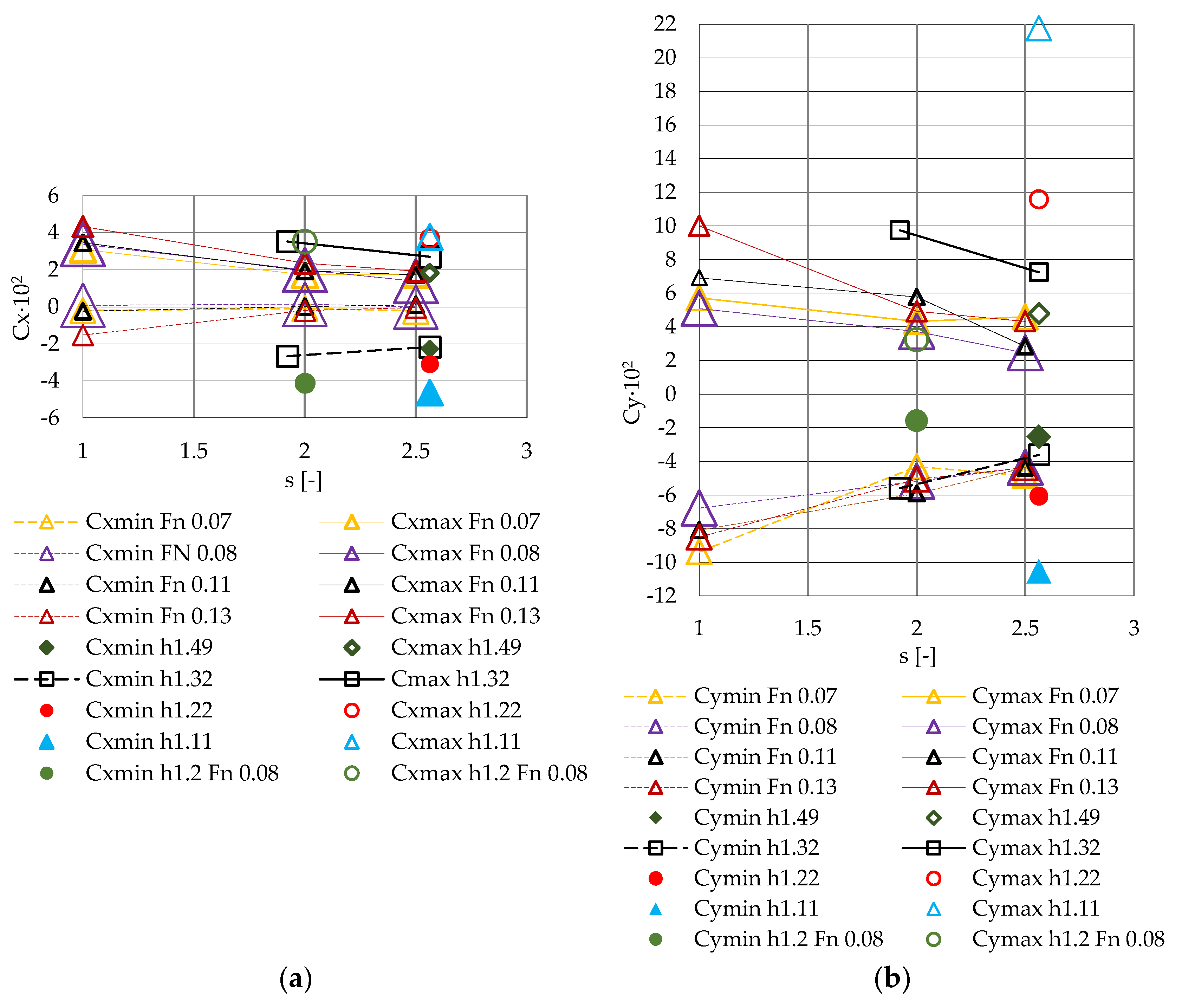
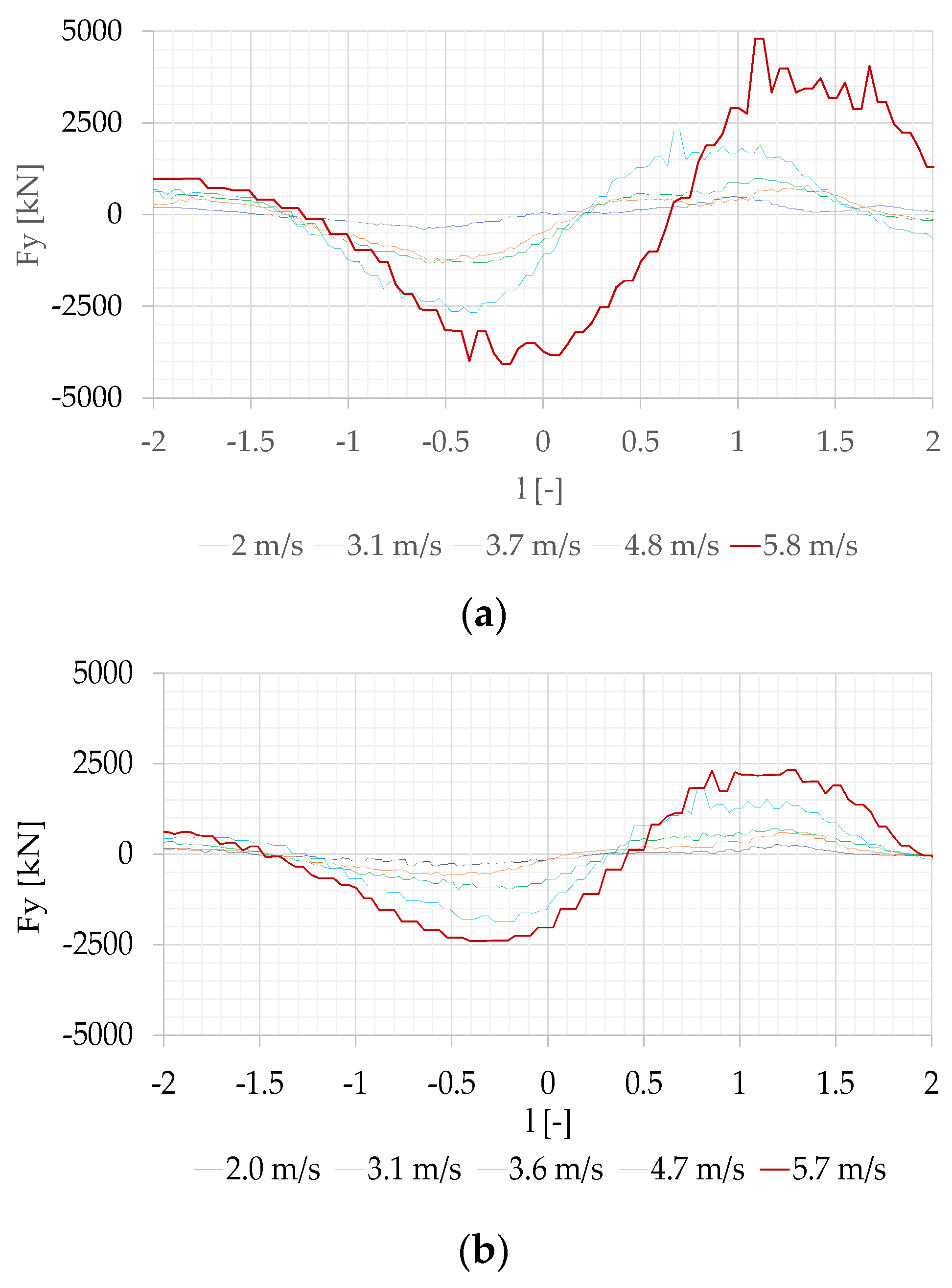
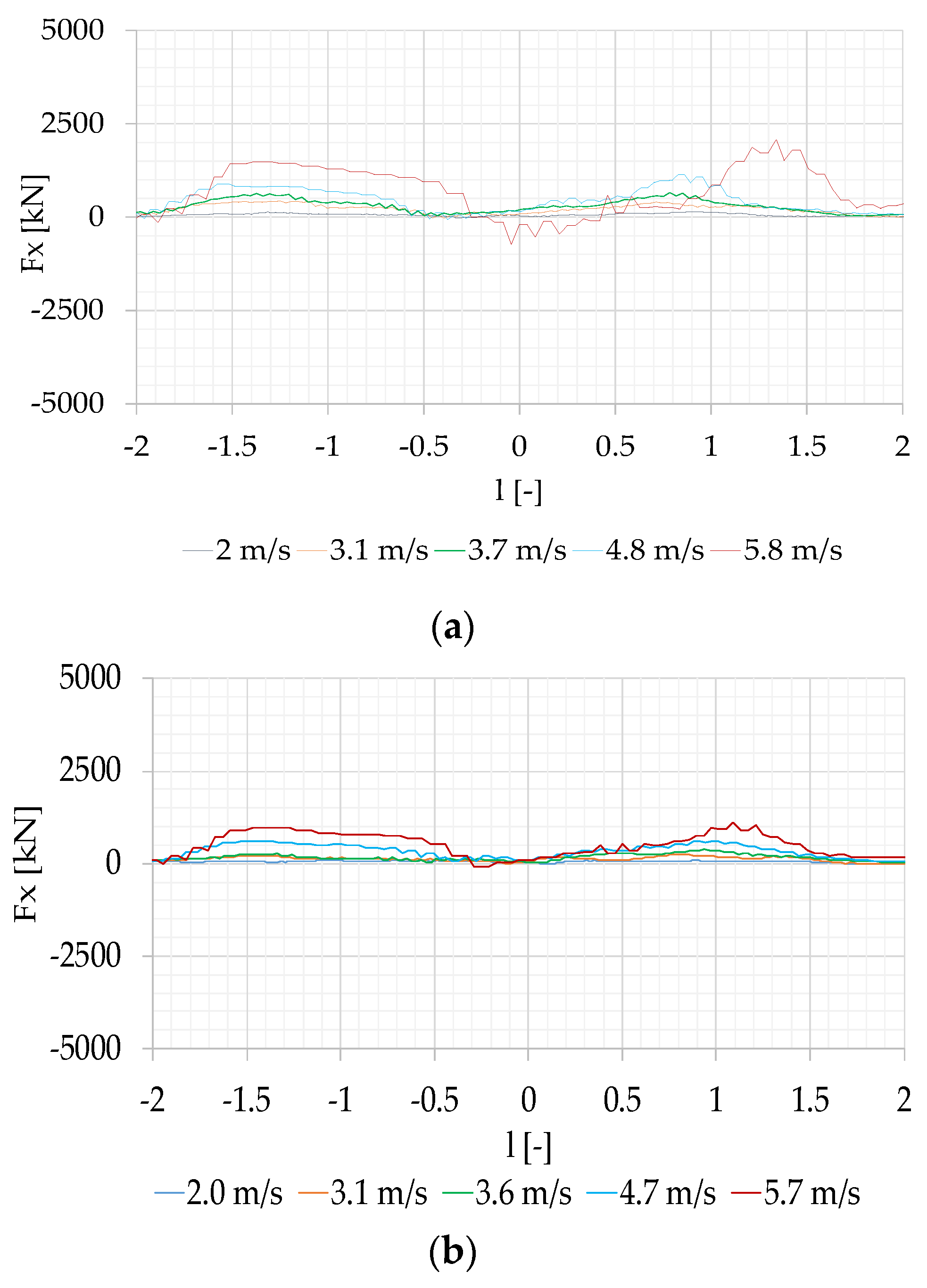
3. Results of the Experimental Study on Passing Ship-Generated Forces on the Moored Ship in Shallow Water Conditions
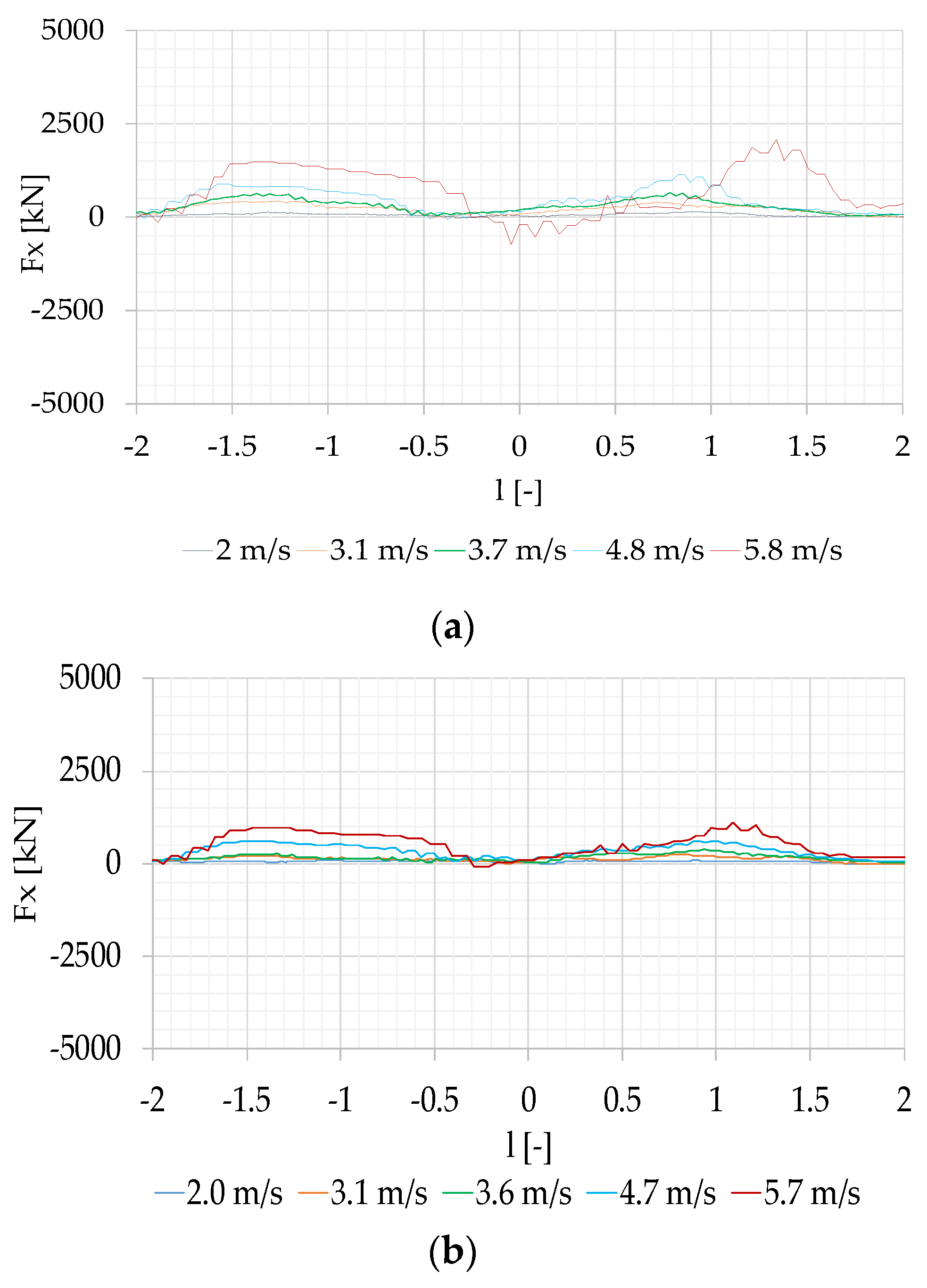
3.1. Results of the Model Tests
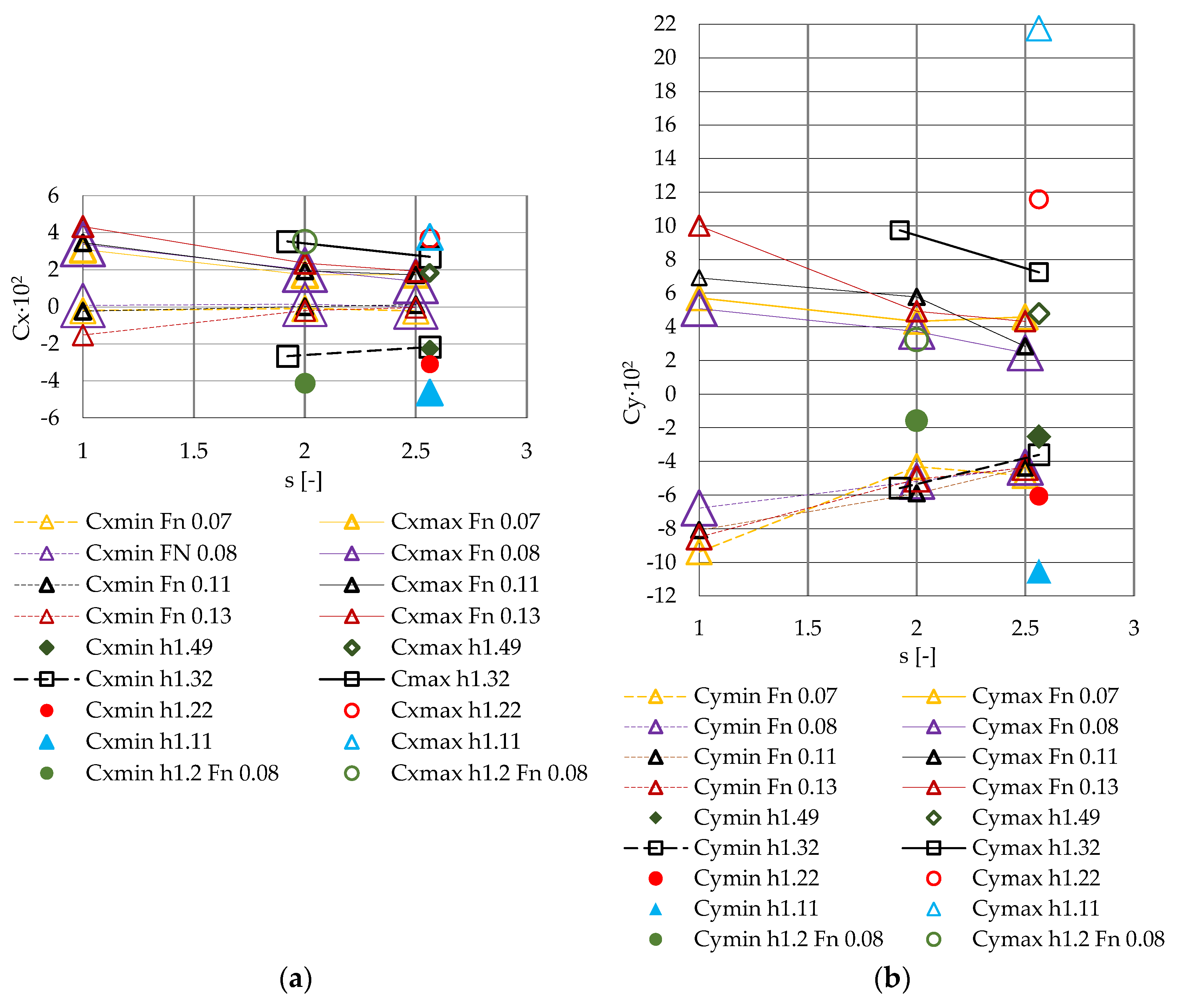
3.2. Verification of the Results of the Model Tests
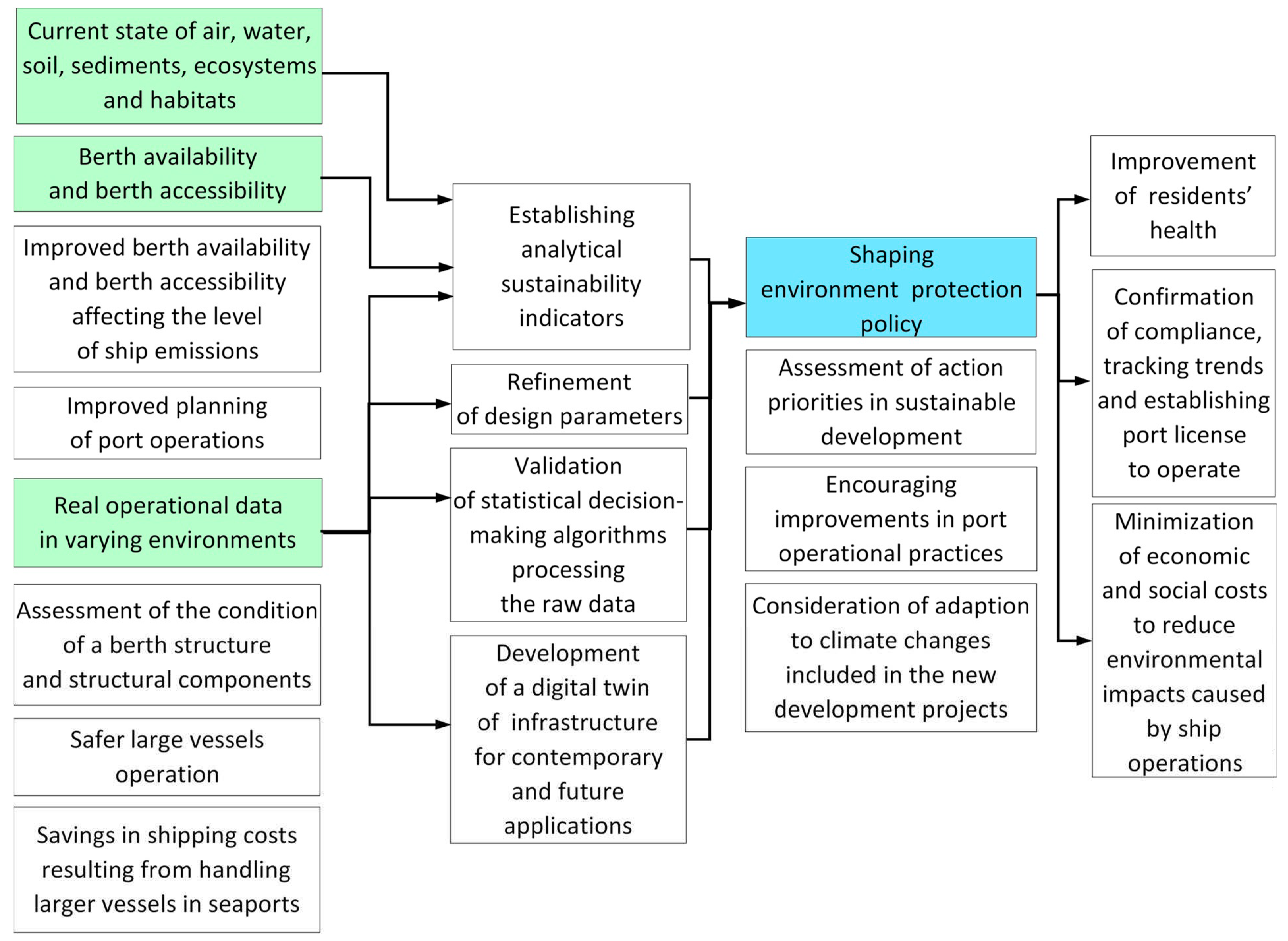
4. Discussion
- planning emergency scenarios,
- predicting reliability and durability of the structure,
- planning changes in operational procedures,
- scheduling maintenance work,
- planning reconstruction work,
- sequencing demolition work,
- developing operational autonomy of infrastructures.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Notteboom, T.; Pallis, A. Optimal Ship Size: Container Ships and Cruise Vessels. In Port Economics, Management and Policy; Notteboom, T., Pallis, A., Rodrigue, J.P., Eds.; Routledge: New York, NY, USA, 2022; Available online: https://porteconomicsmanagement.org/pemp/contents/part9/optimal-ship-size-container-ships-cruise/ (accessed on 24 October 2023).
- Bernacki, D. Assessing the Link between Vessel Size and Maritime Supply Chain Sustainable Performance. Energies 2021, 14, 2979. [Google Scholar] [CrossRef]
- Lee, P.T.-W.; Kwon, O.K.; Ruan, X. Sustainability Challenges in Maritime Transport and Logistics Industry and Its Way Ahead. Sustainability 2019, 11, 1331. [Google Scholar] [CrossRef]
- Puig, M.; Azarkamand, S.; Wooldridge, C.; Selén, V.; Darbra, R.M. Insights on the environmental management system of the European port sector. Sci. Total Environ. 2022, 806, 150550. [Google Scholar] [CrossRef] [PubMed]
- Wang, Q.; Jiang, M. Study on Emission Control of Berthing Vessels-Based on Non-Cooperative Game Theory. Sustainability 2023, 15, 10572. [Google Scholar] [CrossRef]
- Lim, S.; Pettit, S.; Abouarghoub, W.; Beresford, A. Port sustainability and performance: A systematic literature review. Transp. Res. Part D Transp. Environ. 2019, 72, 47–64. [Google Scholar] [CrossRef]
- Condemine, C.; Grau, L.; Masson, Y.; Aubry, S. Live Digital Twin for Hydraulic Structures Fatigue Estimation. In Proceedings of PIANC Smart Rivers 2022. PIANC 2022; Li, Y., Hu, Y., Rigo, P., Lefler, F.E., Zhao, G., Eds.; Lecture Notes in Civil Engineering; Springer: Singapore, 2023; Volume 264. [Google Scholar] [CrossRef]
- Abramowicz-Gerigk, T.; Gerigk, M.K.; Hapke, L.; Tetfejer, K. Cloud-based system for monitoring loads generated on the quay wall by ship propeller jets. Mar. Struct. 2024, 93, 103517. [Google Scholar] [CrossRef]
- Project RPPM.01.01.01-22-0068/16-00 Report. Smart Specializations of Pomerania Region—Offshore Technology, Ports and Logistics—Pomeranian Voivodeship Regional Operational Program for 2014–2020. Development of a Prototype of a System for Monitoring the Loads on Berths and Bed Protection in the Area of Ship Berthing along with the Implementation of the Final Product on the Market by Enamor Ltd. Company from Gdynia; Gdynia Maritime University: Gdynia, Poland, 2020; Unpublished.
- Abramowicz-Gerigk, T.; Burciu, Z.; Jaworski, T.; Nowicki, J. The Large-Scale Physical Model Tests of the Passing Ship Effect on a Ship Moored at the Solid-Type Berth. Sensors 2022, 22, 868. [Google Scholar] [CrossRef]
- Kriebel, D. Mooring Loads due to Parallel Passing Ships. Technical Report TR-6056-OCN. Naval Facilities Engineering Service Center, Port Hueneme, California 93043-4370, Engineering Innovation & Criteria Office, 2005. Available online: https://www.researchgate.net/publication/268601705_Mooring_Loads_Due_to_Parallel_Passing_Ships (accessed on 24 October 2023).
- Swiegers, P.B. Calculation of the Forces on a Moored Ship due to a Passing Container Ship. Master’s Thesis, Stellenbosch University, Stellenbosch, South Africa, 2011. Available online: https://www.researchgate.net/publication/277185025_Calculation_of_forces_on_moored_ships_due_to_passing_ships (accessed on 24 October 2023).
- Port of Antwerp. Available online: https://www.portofantwerpbruges.com/en/our-port/port-future/smart-port#technologies (accessed on 24 October 2023).
- Abramowicz-Gerigk, T.; Burciu, Z.; Gorski, W.; Reichel, M. Full scale measurements of pressure field induced on the quay wall by bow thrusters—Indirect method for seabed velocities monitoring. Ocean Eng. 2018, 162, 150–160. [Google Scholar] [CrossRef]
- Van Zwijnsvoorde, T.; Vantorre, M. Safe Mooring of Large Container Ships at Quay Walls Subject to Passing Ship Effects. Int. J. Marit. Eng. 2017, 159, 367–375. [Google Scholar] [CrossRef]
- Van Zwijnsvoorde, T.; Vantorre, M.; Ides, S. Container Ships Moored at the Port of Antwerp: Modelling Response to Passing Vessels. In Proceedings of the 34th PIANC World Congress, Panama City, Panama, 7–12 May 2018; pp. 14–18. Available online: https://core.ac.uk/download/pdf/196520225.pdf (accessed on 24 October 2023).
- Van der Molen, W.; Moes, J.; Swiegers, P.B.; Vantorre, M. Calculation of Forces on Moored Ships due to Passing Ships. In Proceedings of the 2nd International Conference on Ship Manoeuvring in Shallow and Confined Water: Ship to Ship Interaction, Trondheim, Norway, 18–20 May 2011. [Google Scholar]
- Muga, B.J.; Fang, S.J. Passing Ship Effects-From Theory and Experiment. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 5–8 May 1975. [Google Scholar] [CrossRef]
- Remery, G.F.M. Mooring forces induced by passing ships. In Proceedings of the Offshore Technology Conference, Dallas, TX, USA, 6–8 May 1974; Available online: https://icce-ojs-tamu.tdl.org/icce/article/view/3588/3270 (accessed on 24 October 2023).
- Van Wijhe, H.J.; Pinkster, J.A. The effects of ships passing moored container vessels in the Yangtzehaven, Port of Rotterdam. In Proceedings of the International Conference on Safety and Operations in Canals and Waterways, Glasgow, UK, 15–16 September 2008; pp. 117–130. [Google Scholar]
- Raszeja, M.; Hejmlich, A.; Nowicki, J.; Jaworski, T. Free running ship model tests of interaction between a moored ship and a passing ship. Sci. J. Mar. Univ. Szczecin 2022, 72, 50–56. [Google Scholar] [CrossRef]
- PIANC MarCom WG 167—The Design of Terminals for RoRo and RoPax Vessels 2023. Available online: https://my.pianc.org/#/publications/7b68ce21-d826-4594-8937-103b7be2d44e (accessed on 24 October 2023).
- PIANC MarCom WG 180—Guidelines for Protecting Berthing Structures from Scour Caused by Ships 2015. Available online: https://my.pianc.org/#/publications/306e7120-e583-4c67-9948-f166d6891de5 (accessed on 24 October 2023).
- Port of Rotterdam. Available online: https://smartport.nl/en/kade-van-de-toekomst-impactverhaal-smartport/ (accessed on 24 October 2023).
- Port of Hamburg. Available online: https://www.hamburg-port-authority.de/en/hpa-360/smartport (accessed on 24 October 2023).
- Port of Algeciras. Available online: https://www.fiwoo.eu/en/ports-of-the-future-algeciras-smart-port/ (accessed on 24 October 2023).
- Liu, C.; Zhang, P.; Xu, X. Literature review of digital twin technologies for civil infrastructure. J. Infrastruct. Intell. Resil. 2023, 2, 100050. [Google Scholar] [CrossRef]
- Bado, M.F.; Tonelli, D.; Poli, F.; Zonta, D.; Casas, J.R. Digital Twin for Civil Engineering Systems: An Exploratory Review for Distributed Sensing Updating. Sensors 2022, 22, 3168. [Google Scholar] [CrossRef] [PubMed]
- Cheng, R.; Hou, L.; Xu, S. A Review of Digital Twin Applications in Civil and Infrastructure Emergency Management. Buildings 2023, 13, 1143. [Google Scholar] [CrossRef]
- Jiang, F.; Ma, L.; Broyd, T.; Chen, K. Digital twin and its implementations in the civil engineering sector. Automat. Constr. 2021, 130, 103838. [Google Scholar] [CrossRef]
- Torzoni, M.; Tezzele, M.; Mariani, S.; Manzoni, A.; Willcox, K. A digital twin framework for civil engineering structures. arXiv 2023, arXiv:2308.01445. [Google Scholar] [CrossRef]
- PIANC InCom WG 199—Health Monitoring of Port and Waterways Structures 2023. Available online: https://www.pianc.org/publication/health-monitoring-of-port-and-waterways-structures/ (accessed on 24 October 2023).
- Gerigk, M. Interference between Land and Sea Logistics Systems. Multifunctional Building System Design Towards Autonomous Integrated Transport Infrastructure. TransNav Int. J. Mar. Navig. Saf. Trans. 2022, 16, 439–446. [Google Scholar] [CrossRef]
- Kolakowski, P.; Rutkowski, G.; Lebkowski, A. Ships-To-Ship Magnetic Mooring Systems–The New Perspectives. TransNav Int. J. Mar. Navig. Saf. Trans. 2023, 17, 841–851. [Google Scholar] [CrossRef]
- Karas, A. Smart Port as a Key to the Future Development of Modern Ports. TransNav. Int. J. Mar. Navig. Saf. Trans. 2020, 14, 27–31. [Google Scholar] [CrossRef]
- Zhang, N.; Gao, J.; Xu, S.; Tang, S.; Guo, M. Establishing an evaluation index system of Coastal Port shoreline resources utilization by objective indicators. Ocean. Coast. Manag. 2010, 53, 301–311. [Google Scholar] [CrossRef]
- Housni, F.; Maurady, A.; Barnes, P.; Boumane, A.; Britel, R.M. Indicators for monitoring and assessment of environmental management systems in ports. E3S Web Conf. 2021, 234, 00055. [Google Scholar] [CrossRef]
- Ng, A.K.Y.; Song, S. The environmental impacts of pollutants generated by routine shipping operations on ports. Ocean. Coast. Manag. 2010, 53, 301–311. [Google Scholar] [CrossRef]
- Vakili, S.V.; Olçer, A.I.; Ballini, F. The development of a policy framework to mitigate underwater noise pollution from commercial vessels: The role of ports. Mar. Policy 2020, 120, 104132. [Google Scholar] [CrossRef]
- Kwon, Y. High-resolution spatial distribution of marine vessel emission and its significance in sustainable port air quality management: A case study of Port of Incheon. Ocean Eng. 2022, 258, 111799. [Google Scholar] [CrossRef]
- Sogut, M.Z.; Erdogan, O. An investigation on a holistic framework of green port transition based on energy and environmental sustainability. Ocean Eng. 2022, 266, 112671. [Google Scholar] [CrossRef]
- Alamoush, A.S.; Ballini, F.; Ölçer, A.I. Revisiting port sustainability as a foundation for the implementation of the United Nations Sustainable Development Goals (UN SDGs). J. Shipp. Trade 2021, 6, 19. [Google Scholar] [CrossRef]
- Pham, T.Y. A smart port development: Systematic literature and bibliometric analysis. Asian J. Shipp. Logist. 2023, 39, 57–62. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dimension [m] | Moored Ship Model | Passing Ship Model | |
|---|---|---|---|
| L | Length overall | 9.49 | 9.17 |
| LBP | Length between perpendiculars | 9.00 | 9.30 |
| B | Breadth | 1.26 | 1.34 |
| T | Draft | 0.51 | 0.52 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abramowicz-Gerigk, T.; Burciu, Z.; Gerigk, M.K.; Jachowski, J. Monitoring of Ship Operations in Seaport Areas in the Sustainable Development of Ocean–Land Connections. Sustainability 2024, 16, 597. https://doi.org/10.3390/su16020597
Abramowicz-Gerigk T, Burciu Z, Gerigk MK, Jachowski J. Monitoring of Ship Operations in Seaport Areas in the Sustainable Development of Ocean–Land Connections. Sustainability. 2024; 16(2):597. https://doi.org/10.3390/su16020597
Chicago/Turabian StyleAbramowicz-Gerigk, Teresa, Zbigniew Burciu, Miroslaw K. Gerigk, and Jacek Jachowski. 2024. "Monitoring of Ship Operations in Seaport Areas in the Sustainable Development of Ocean–Land Connections" Sustainability 16, no. 2: 597. https://doi.org/10.3390/su16020597
APA StyleAbramowicz-Gerigk, T., Burciu, Z., Gerigk, M. K., & Jachowski, J. (2024). Monitoring of Ship Operations in Seaport Areas in the Sustainable Development of Ocean–Land Connections. Sustainability, 16(2), 597. https://doi.org/10.3390/su16020597