
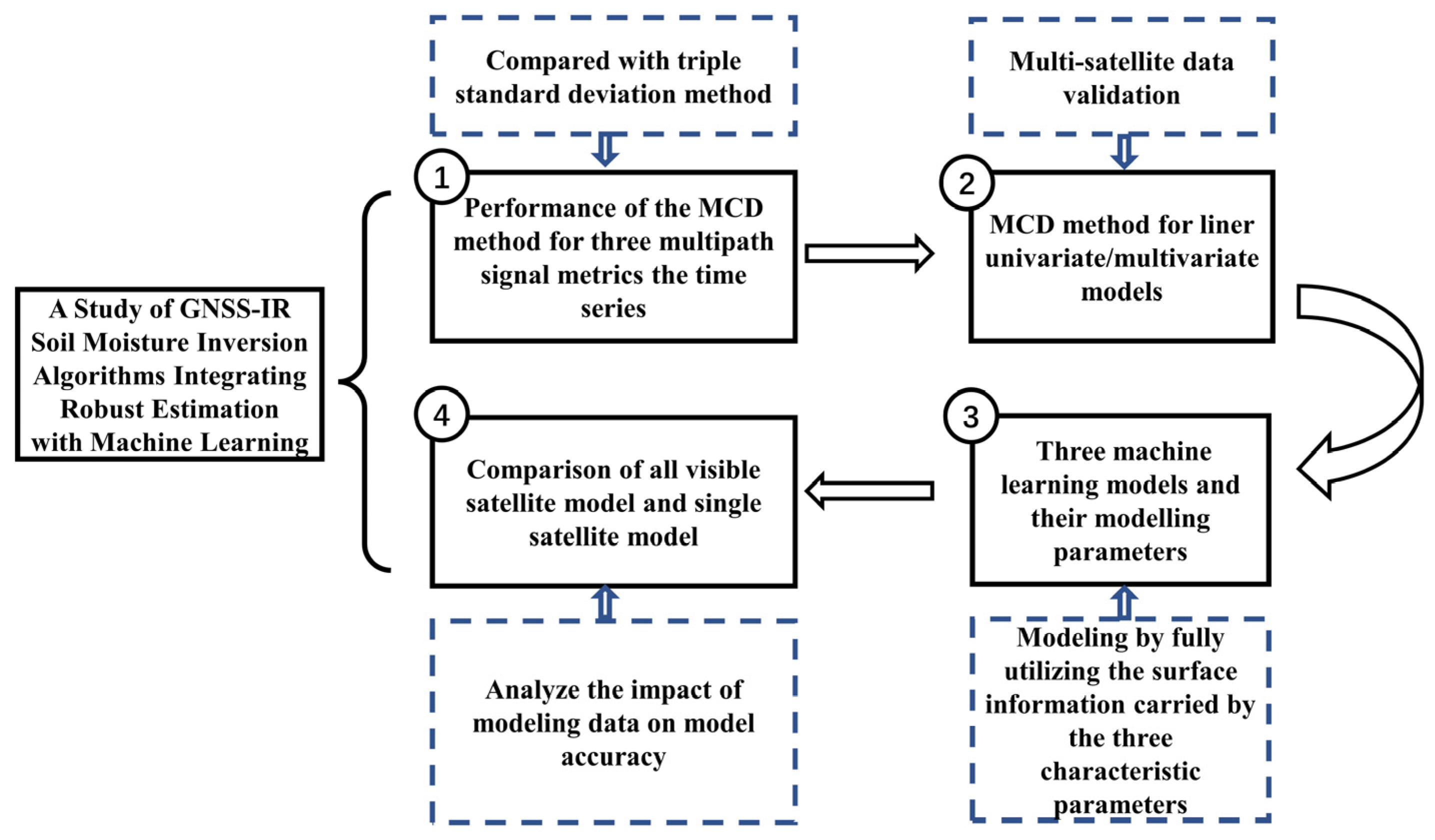
A Study of GNSS-IR Soil Moisture Inversion Algorithms Integrating Robust Estimation with Machine Learning


Abstract
1. Introduction
2. Study Area and Data Resource
3. Methodology
3.1. Theoretical Background of GNSS-IR Soil Moisture Linear Inversion
3.2. Soil Moisture Inversion Algorithm Fusing Robust Estimation and Machine Learning
3.2.1. MCD Robust Estimation
3.2.2. Machine Learning Algorithms
- Backward Propagation Neural Network
- 2.
- Gaussian Process Regression
- 3.
- Random Forest
4. Experiments and Results
4.1. MCD Robust Estimation for Soil Moisture Inversion
4.2. Robust Multiple Regression Model for Soil Moisture Inversion
4.3. Machine Learning Models for Soil Moisture Inversion
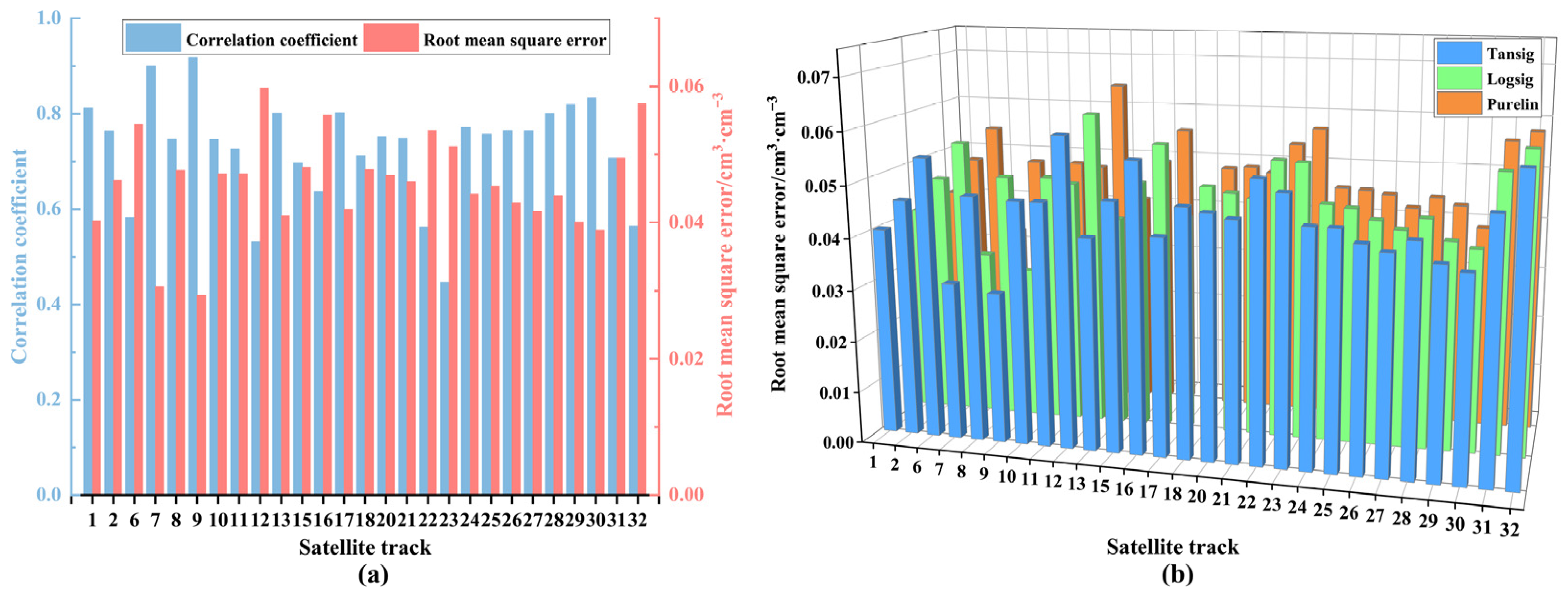
4.3.1. Hyper Parameters Selection of the Backward Propagation Neural Network Model
4.3.2. Hyper Parameters Selection of the Gaussian Process Regression Model
4.3.3. Hyper Parameters Selection of the Gaussian Process Regression Model
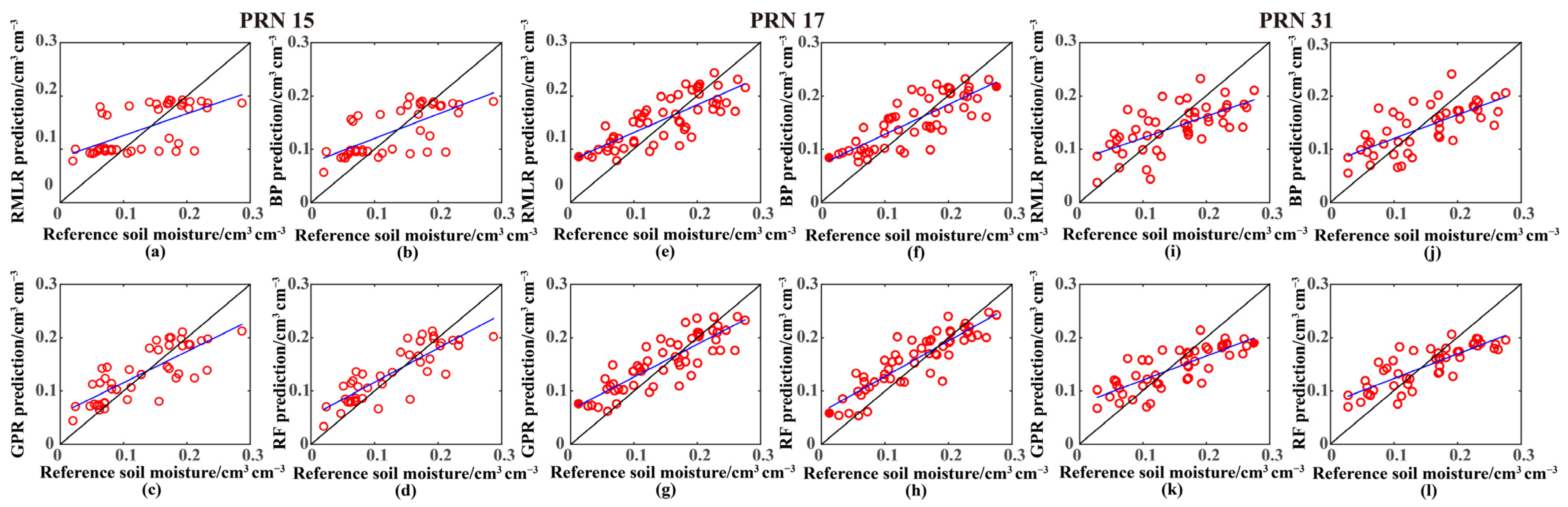
4.3.4. Machine Learning Models Based on Single satellite Data for Soil Moisture Inversion
4.3.5. Machine Learning Models Based on All Visible Satellites Data for Soil Moisture Inversion
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Saux-Picart, S.; Ottlé, C.; Decharme, B.; André, C.; Zribi, M.; Perrier, A.; Coudert, B.; Boulain, N.; Cappelaere, B.; Descroix, L.; et al. Water and Energy Budgets Simulation over the AMMA-Niger Super-Site Spatially Constrained with Remote Sensing Data. J. Hydrol. 2009, 1, 287–295. [Google Scholar] [CrossRef]
- Blöschl, G.; Bierkens, M.F.; Chambel, A.; Cudennec, C.; Destouni, G.; Fiori, A.; Kirchner, J.W.; McDonnell, J.J.; Savenije, H.H.; Sivapalan, M.; et al. Twenty-three unsolved problems in hydrology (UPH)—A community perspective. Hydrol. Sci. J. 2019, 64, 1141–1158. [Google Scholar] [CrossRef]
- Zhang, D.J.; Zhan, J.; Qiao, Z.; Zupan, R. Evaluation of the Performance of the Integration of Remote Sensing and Noah Hydrologic Model for Soil Moisture Estimation in Hetao Irrigation Region of Inner Mongolia. Can. J. Remote Sens. 2020, 46, 552–566. [Google Scholar] [CrossRef]
- Albergel, C.; De Rosnay, P.; Gruhier, C.; Munoz-Sabater, J.; Hasenauer, S.; Isaksen, L.; Kerr, Y.; Wagner, W. Evaluation of remotely sensed and modelled soil moisture products using global ground-based in situ observations. Remote Sens. Environ. 2012, 118, 215–226. [Google Scholar] [CrossRef]
- Kerr, Y.H.; Waldteufel, P.; Wigneron, J.-P.; Martinuzzi, J.; Font, J.; Berger, M. Soil moisture retrieval from space: The Soil Moisture and Ocean Salinity (SMOS) mission. IEEE Trans. Geosci. Remote Sens. 2001, 39, 1729–1735. [Google Scholar] [CrossRef]
- Chew, C.C.; Small, E.E. Soil Moisture Sensing Using Spaceborne GNSS Reflections: Comparison of CYGNSS Reflectivity to SMAP Soil Moisture. Geophys. Res. Lett. 2018, 45, 4049–4057. [Google Scholar] [CrossRef]
- Li, X.; Yang, D.; Yang, J.; Zheng, G.; Han, G.; Nan, Y.; Li, W. Analysis of coastal wind speed retrieval from CYGNSS mission using artificial neural network. Remote Sens. Environ. 2021, 260, 112454. [Google Scholar] [CrossRef]
- Zavorotny, V.U.; Gleason, S.; Cardellach, E.; Camps, A. Tutorial on Remote Sensing Using GNSS Bistatic Radar of Opportunity. IEEE Geosci. Remote Sens. Mag. 2014, 2, 8–45. [Google Scholar] [CrossRef]
- Wu, X.; Ma, W.; Xia, J.; Bai, W.; Jin, S.; Calabia, A. Spaceborne GNSS-R Soil Moisture Retrieval: Status, Development Opportunities, and Challenges. Remote Sens. 2020, 13, 45. [Google Scholar] [CrossRef]
- Yu, K. Navigation Satellite Constellations and Navigation Signals. In Theory and Practice of GNSS Reflectometry; Springer: Singapore, 2021; pp. 13–34. [Google Scholar]
- Hall, C.D.; Cordey, R.A. Multistatic scatterometry. In Proceedings of the International Geoscience and Remote Sensing Symposium, ‘Remote Sensing: Moving Toward the 21st Century’, Edinburgh, UK, 12–16 September 1988; Volume 1, pp. 561–562. [Google Scholar]
- Bilich, A.; Larson, K.M. Mapping the GPS multipath environment using the signal-to-noise ratio (SNR). Radio Sci. 2007, 42, 1–16, Erratum in Radio Sci. 2008, 43, 1. [Google Scholar] [CrossRef]
- Bilich, A.; Larson, K.M.; Axelrad, P. Modeling GPS phase multipath with SNR: Case study from the Salar de Uyuni, Boliva. J. Geophys. Res. Solid Earth 2008, 113, 4. [Google Scholar]
- Kavak, A.; Vogel, W.J.; Xu, G. Using GPS to measure ground complex permittivity. Electron. Lett. 1998, 34, 254–255. [Google Scholar] [CrossRef]
- Larson, K.M.; Small, E.E.; Gutmann, E.; Bilich, A.; Axelrad, P.; Braun, J. Using GPS multipath to measure soil moisture fluctuations: Initial results. GPS Solut. 2008, 12, 173–177. [Google Scholar] [CrossRef]
- Larson, K.M.; Small, E.E.; Gutmann, E.D.; Bilich, A.L.; Braun, J.J.; Zavorotny, V.U. Use of GPS receivers as a soil moisture network for water cycle studies. Geophys. Res. Lett. 2008, 35, 24. [Google Scholar] [CrossRef]
- Larson, K.M.; Braun, J.J.; Small, E.E.; Zavorotny, V.U.; Gutmann, E.D.; Bilich, A.L. GPS Multipath and Its Relation to Near-Surface Soil Moisture Content. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2010, 3, 91–99. [Google Scholar] [CrossRef]
- Chew, C.; Small, E.E.; Larson, K.M. An algorithm for soil moisture estimation using GPS-interferometric reflectometry for bare and vegetated soil. GPS Solut. 2016, 20, 525–537. [Google Scholar] [CrossRef]
- Roussel, N.; Frappart, F.; Ramillien, G.; Darrozes, J.; Baup, F.; Lestarquit, L.; Ha, M.C. Detection of Soil Moisture Variations Using GPS and GLONASS SNR Data for Elevation Angles Ranging from 2° to 70°. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2016, 9, 4781–4794. [Google Scholar] [CrossRef]
- Vey, S.; Güntner, A.; Wickert, J.; Blume, T.; Ramatschi, M. Long-term soil moisture dynamics derived from GNSS interferometric reflectometry: A case study for Sutherland, South Africa. GPS Solut. 2016, 20, 641–654. [Google Scholar] [CrossRef]
- Chew, C.C.; Small, E.E.; Larson, K.M.; Zavorotny, V.U. Vegetation Sensing Using GPS-Interferometric Reflectometry: Theoretical Effects of Canopy Parameters on Signal-to-Noise Ratio Data. IEEE Trans. Geosci. Remote Sens. 2015, 53, 2755–2764. [Google Scholar] [CrossRef]
- Wan, W.; Larson, K.M.; Small, E.E.; Chew, C.C.; Braun, J.J. Using geodetic GPS receivers to measure vegetation water content. GPS Solut. 2015, 19, 237–248. [Google Scholar] [CrossRef]
- Wang, X.; Zhang, Q.; Zhang, S. Water levels measured with SNR using wavelet decomposition and Lomb–Scargle periodogram. GPS Solut. 2018, 22, 22. [Google Scholar] [CrossRef]
- Small, E.E.; Larson, K.M.; Chew, C.C.; Dong, J.; Ochsner, T.E. Validation of GPS-IR Soil Moisture Retrievals: Comparison of Different Algorithms to Remove Vegetation Effects. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2016, 9, 4759–4770. [Google Scholar]
- Neelam, M.; Colliander, A.; Mohanty, B.P.; Cosh, M.H.; Misra, S.; Jackson, T.J. Multiscale Surface Roughness for Improved Soil Moisture Estimation. IEEE Trans. Geosci. Remote Sens. 2020, 58, 5264–5276. [Google Scholar]
- Herbert, C.; Camps, A.; Wellmann, F.; Vall-Llossera, M. Bayesian Unsupervised Machine Learning Approach to Segment Arctic Sea Ice Using SMOS Data. Geophys. Res. Lett. 2021, 48, 6. [Google Scholar] [CrossRef]
- Jia, Y.; Jin, S.; Savi, P.; Gao, Y.; Tang, J.; Chen, Y.; Li, W. GNSS-R soil moisture retrieval based on a XGboost machine learning aided method: Performance and validation. Remote Sens. 2019, 11, 1655. [Google Scholar] [CrossRef]
- Senyurek, V.; Lei, F.; Boyd, D.; Gurbuz, A.C.; Kurum, M.; Moorhead, R. Evaluations of Machine Learning-Based CYGNSS Soil Moisture Estimates against SMAP Observations. Remote Sens. 2020, 12, 3503. [Google Scholar] [CrossRef]
- Senyurek, V.; Lei, F.; Boyd, D.; Kurum, M.; Gurbuz, A.C.; Moorhead, R. Machine Learning-Based CYGNSS Soil Moisture Estimates over ISMN sites in CONUS. Remote Sens. 2020, 12, 1168. [Google Scholar] [CrossRef]
- Ren, C.; Liang, Y.J.; Lu, X.J.; Yan, H.B. Research on the soil moisture sliding estimation method using the LS-SVM based on multi-satellite fusion. Int. J. Remote Sens. 2019, 40, 2104–2119. [Google Scholar] [CrossRef]
- Larson, K.M.; Small, E.E. Normalized Microwave Reflection Index: A Vegetation Measurement Derived from GPS Networks. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2014, 7, 1501–1511. [Google Scholar] [CrossRef]
- Martín, A.; Anquela, A.B.; Ibáñez, S.; Baixauli, C.; Blanc, S. Python software to transform GPS SNR wave phases to volumetric water content. GPS Solut. 2022, 26, 7. [Google Scholar] [CrossRef]
- Larson, K.M.; Nievinski, F.G. GPS snow sensing: Results from the EarthScope Plate Boundary Observatory. GPS Solut. 2013, 17, 41–52. [Google Scholar] [CrossRef]
- Chen, K.; Cao, X.; Shen, F.; Ge, Y. An Improved Method of Soil Moisture Retrieval Using Multi-Frequency SNR Data. Remote Sens. 2021, 13, 3725. [Google Scholar] [CrossRef]
- Liang, Y.J.; Ren, C.; Wang, H.Y.; Huang, Y.B.; Zheng, Z.T. Research on soil moisture inversion method based on GA-BP neural network model. Int. J. Remote Sens. 2019, 40, 2087–2103. [Google Scholar] [CrossRef]
- Lv, J.; Zhang, R.; Tu, J.; Liao, M.; Pang, J.; Yu, B.; Li, K.; Xiang, W.; Fu, Y.; Liu, G. A GNSS-IR Method for Retrieving Soil Moisture Content from Integrated Multi-Satellite Data That Accounts for the Impact of Vegetation Moisture Content. Remote Sens. 2021, 13, 2442. [Google Scholar] [CrossRef]
- Hubert, M.; Debruyne, M.; Rousseeuw, P.J. Minimum covariance determinant and extensions. Wires Comput. Stat. 2018, 10, 1421. [Google Scholar] [CrossRef]
- Rumelhart, D.E.; Hinton, G.E.; Williams, R.J. Learning representations by back-propagating errors. Nature 1986, 323, 533–536. [Google Scholar] [CrossRef]
- Wythoff, B.J. Backpropagation neural networks. A tutorial. Chemom. Intell. Lab. 1993, 18, 115–155. [Google Scholar] [CrossRef]
- Rasmussen, C.E. Gaussian Processes in Machine Learning; Advanced Lectures on Machine Learning; Springer: Berlin/Heidelberg, Germany, 2004; pp. 63–71. [Google Scholar]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Jia, Y.; Jin, S.; Savi, P.; Yan, Q.; Li, W. Modeling and Theoretical Analysis of GNSS-R Soil Moisture Retrieval Based on the Random Forest and Support Vector Machine Learning Approach. Remote Sens. 2020, 12, 3679. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Satellite Tracks | Variable | Model Equation | Correlation Coefficient | Root Mean Square Error (cm3/cm3) |
|---|---|---|---|---|
| PRN 15 | Frequency | 0.2844 | 0.0649 | |
| Amplitude | 0.4949 | 0.0580 | ||
| Phase | 0.5019 | 0.0591 | ||
| Multiple | 0.6366 | 0.0520 | ||
| PRN 17 | Frequency | 0.4512 | 0.0615 | |
| Amplitude | 0.3124 | 0.0630 | ||
| Phase | 0.4436 | 0.0634 | ||
| Multiple | 0.7890 | 0.0438 | ||
| PRN 31 | Frequency | 0.5052 | 0.0589 | |
| Amplitude | 0.5389 | 0.0590 | ||
| Phase | 0.3265 | 0.0674 | ||
| Multiple | 0.6168 | 0.0548 |
| Hidden Layer | R | RMSE (cm3/cm3) | Hidden Layer | R | RMSE (cm3/cm3) |
|---|---|---|---|---|---|
| 3 | 0.6847 | 0.0517 | 9 | 0.6889 | 0.0513 |
| 4 | 0.6807 | 0.0513 | 10 | 0.6900 | 0.0509 |
| 5 | 0.6896 | 0.0514 | 11 | 0.6730 | 0.0515 |
| 6 | 0.7065 | 0.0495 | 12 | 0.6760 | 0.0516 |
| 7 | 0.6916 | 0.0515 | 13 | 0.6581 | 0.0525 |
| 8 | 0.6633 | 0.0523 | 14 | 0.6633 | 0.0524 |
| Activation Function | R | RMSE (cm3/cm3) |
|---|---|---|
| Tansig | 0.7065 | 0.0495 |
| Logsig | 0.6460 | 0.0536 |
| Purelin | 0.6027 | 0.0564 |
| Kernel Function | R | RMSE (cm3/cm3) |
|---|---|---|
| Squared exponential kernel | 0.7225 | 0.0492 |
| Exponential kernel | 0.7543 | 0.0474 |
| Matérn 32 kernel | 0.7524 | 0.0478 |
| Matérn 52 kernel | 0.7472 | 0.0477 |
| Rational quadratic kernel | 0.7559 | 0.0475 |
| Ard exponential kernel | 0.7874 | 0.0455 |
| Decision Tree | R | RMSE (cm3/cm3) | Decision Tree | R | RMSE (cm3/cm3) |
|---|---|---|---|---|---|
| 1 | 0.7995 | 0.0437 | 7 | 0.7724 | 0.0448 |
| 2 | 0.7778 | 0.0446 | 8 | 0.7734 | 0.0447 |
| 3 | 0.7720 | 0.0448 | 9 | 0.7684 | 0.0450 |
| 4 | 0.7777 | 0.0447 | 10 | 0.7780 | 0.0455 |
| 5 | 0.7793 | 0.0447 | 11 | 0.7744 | 0.0456 |
| 6 | 0.7775 | 0.0445 | 12 | 0.7749 | 0.0457 |
| Satellite Track | Model | R | RMSE (cm3/cm3) | MAE (cm3/cm3) |
|---|---|---|---|---|
| PRN 15 | RMLR | 0.6366 | 0.0520 | 0.0424 |
| BPNN | 0.6967 | 0.0481 | 0.0390 | |
| GPR | 0.7933 | 0.0409 | 0.0328 | |
| RF | 0.8473 | 0.0364 | 0.0297 | |
| PRN 17 | RMLR | 0.7890 | 0.0438 | 0.0386 |
| BPNN | 0.8020 | 0.0420 | 0.0357 | |
| GPR | 0.8491 | 0.0382 | 0.0321 | |
| RF | 0.8827 | 0.0354 | 0.0295 | |
| PRN 31 | RMLR | 0.6168 | 0.0548 | 0.0462 |
| BPNN | 0.7065 | 0.0495 | 0.0432 | |
| GPR | 0.7874 | 0.0455 | 0.0386 | |
| RF | 0.7995 | 0.0437 | 0.0347 |
| Model | R | RMSE (cm3/cm3) | MAE (cm3/cm3) |
|---|---|---|---|
| RMLR | 0.6017 | 0.0551 | 0.0463 |
| BPNN | 0.6346 | 0.0533 | 0.0431 |
| GPR | 0.6731 | 0.0493 | 0.0413 |
| RF | 0.7365 | 0.0387 | 0.0323 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ding, R.; Zheng, N.; Zhang, H.; Zhang, H.; Lang, F.; Ban, W. A Study of GNSS-IR Soil Moisture Inversion Algorithms Integrating Robust Estimation with Machine Learning. Sustainability 2023, 15, 6919. https://doi.org/10.3390/su15086919
Ding R, Zheng N, Zhang H, Zhang H, Lang F, Ban W. A Study of GNSS-IR Soil Moisture Inversion Algorithms Integrating Robust Estimation with Machine Learning. Sustainability. 2023; 15(8):6919. https://doi.org/10.3390/su15086919
Chicago/Turabian StyleDing, Rui, Nanshan Zheng, Hao Zhang, Hua Zhang, Fengkai Lang, and Wei Ban. 2023. "A Study of GNSS-IR Soil Moisture Inversion Algorithms Integrating Robust Estimation with Machine Learning" Sustainability 15, no. 8: 6919. https://doi.org/10.3390/su15086919
APA StyleDing, R., Zheng, N., Zhang, H., Zhang, H., Lang, F., & Ban, W. (2023). A Study of GNSS-IR Soil Moisture Inversion Algorithms Integrating Robust Estimation with Machine Learning. Sustainability, 15(8), 6919. https://doi.org/10.3390/su15086919