


Optimized Deep Learning with Learning without Forgetting (LwF) for Weather Classification for Sustainable Transportation and Traffic Safety

 ,
, 

Abstract
1. Introduction
- This research aims to suggest an automated workflow that can automatically accurately identify and classify weather. The proposed Model’s initial training images were compiled using the autoargumention, which can determine the textural connection among an image’s pixels. This research utilizes the online weather dataset.
- The modified Yolov5 Model distinguishes the different classifications of weather.
- The proposed technique and existing methods, i.e., Yolov5 model and SDG optimizer, hybrid Learning without forgetting, were implemented over Google Cololab and compared based on comparison parameters, i.e., Sensitivity, precision, Accuracy, and similarity index values.
- The proposed Model achieves better precision, Accuracy, and Sensitivity than existing methods.
2. Review of Literature
3. Dataset and Experiment
3.1. Dataset
- 0—Cloudy
- 1—Foggy
- 2—Rainy
- 3—Shine
- 4—Sunrise
3.2. Methods
3.2.1. Architecture
- Convolutional layer
- Pooling layer
- Fully-connected (FC) layer
3.2.2. Convolutional Layer
3.2.3. Pooling Layer
3.2.4. Fully-Connected Layer
3.2.5. Disadvantages of YOLO
- It has comparatively low recall and more localization error compared to faster R_CNN.
- It struggles to detect close objects and detect small objects [27].
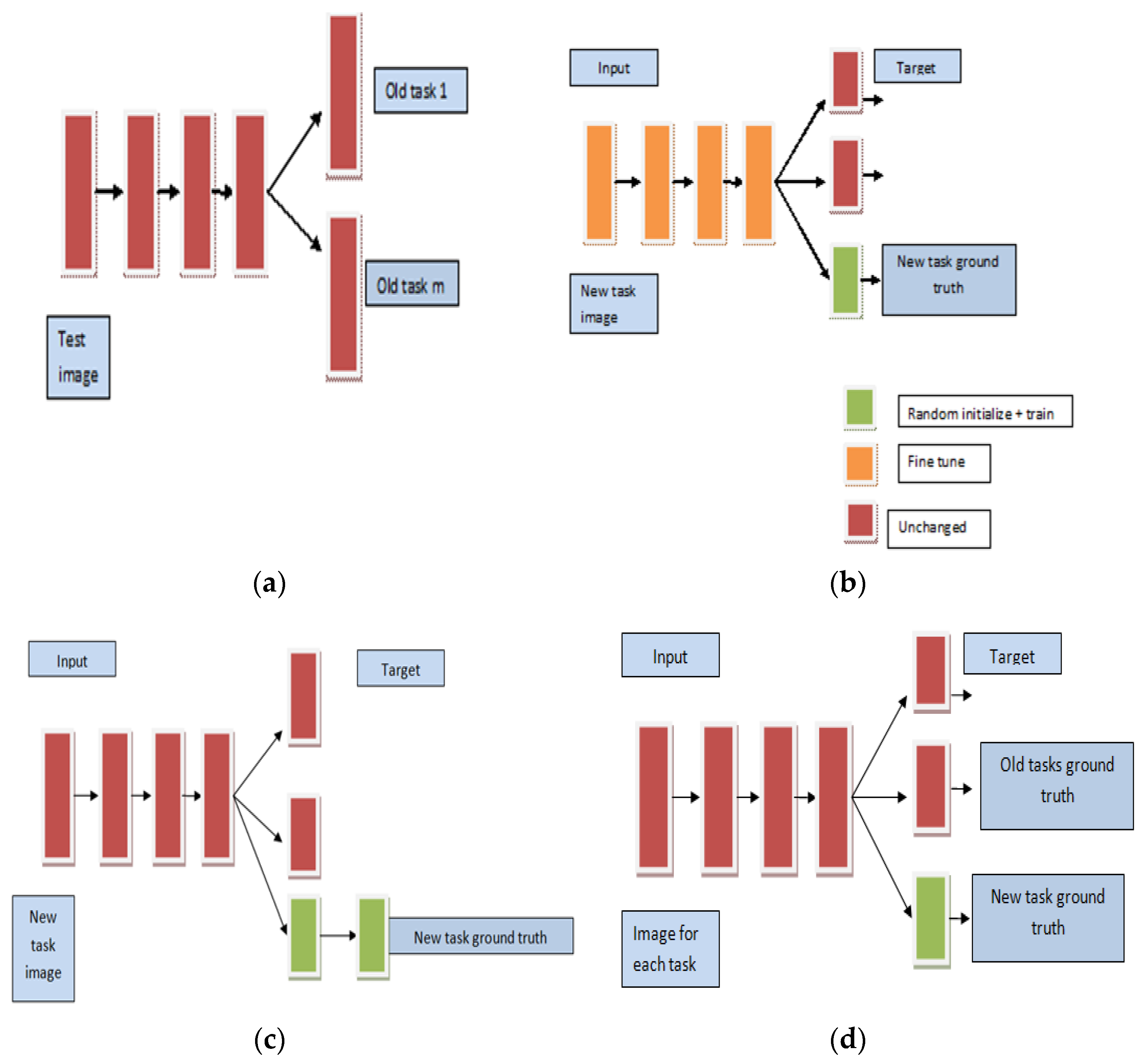
3.3. Proposed Methodology
- Step 1.
- If many options exist, choose the one where the goal function is the highest.
- Step 2.
- Next, it should examine this box’s overlap (Intersection over Union, IOU) with others.
- Step 3.
- Any boxes whose boundaries overlap by more than half (intersection > union) should be discarded.
- Step 4.
- Follow it up by moving on to the next-highest objectiveness rating.
- Step 5.
- Finally, do it again from step 4.
4. Experimental Results
4.1. Experiment Setting
4.2. Weather-Specific Features
- (1)
- Brightness: The level of illumination is a crucial characteristic of pixels. Pictures taken on clear days tend to have a higher luminance than those taken in the presence of clouds or fog. Luma Brightness was introduced by Sergey Bezryadin et al. [19] as an efficient technique to compute brightness replacements, and its corresponding formula is given in Equation (1):
- (2)
- Contrast is the difference between a picture’s brightest and darkest parts or the range of pixel intensities. The greater the disparity between the two, the greater the contrast. Using the encoded contrasts as a percentile in picture saturation, we may determine the contrast. Equations (2)–(5) are a straightforward way to calculate the contrast metric:
- (3)
- Haze: The formula is as follows (Equations (6)–(8)):
- (4)
- Sharpness: It is calculated as:
Implications of Training and Validation Loss
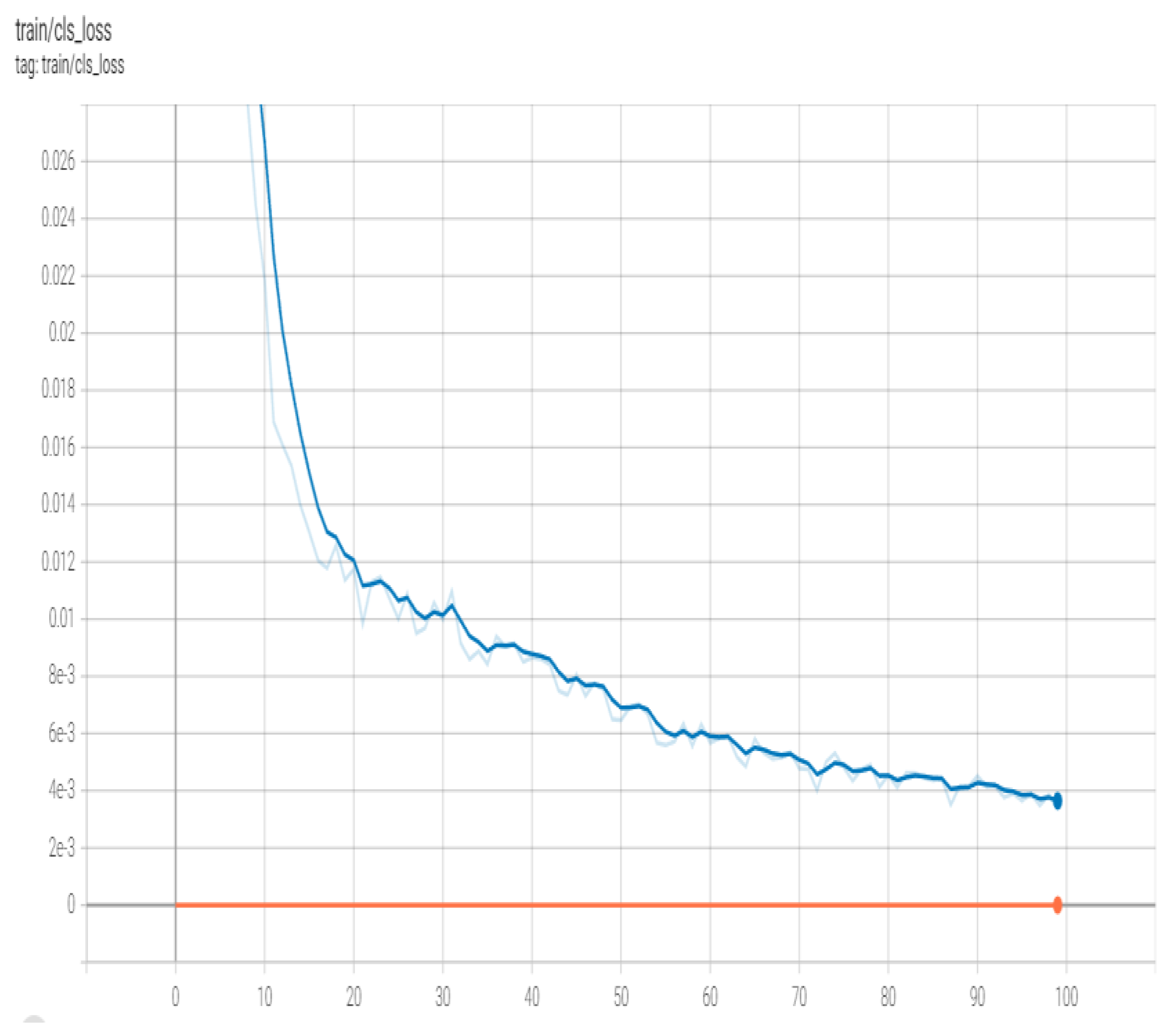
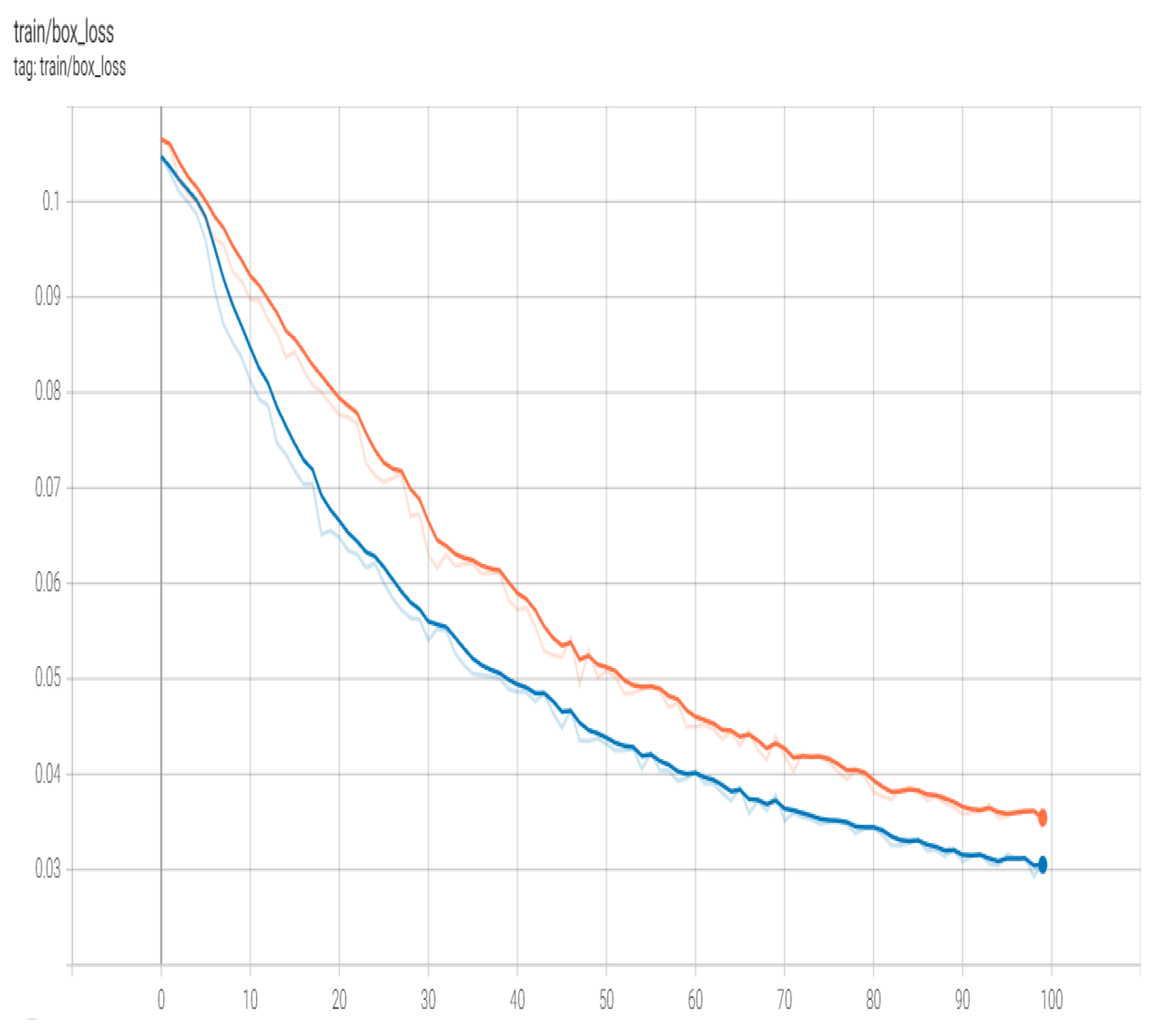
- Loss: We describe YOLOv5 losses and metrics to help you make sense of the findings. Three components make up the YOLO loss function:
- box_loss—First, we have box loss, which is the bounding box regression loss (Mean Squared Error).
- obj_loss—Object loss (or obj loss) is the degree to which one doubts the presence of an object.
- cls_loss—The classification loss, or cls loss, is the third variable (Cross-Entropy).
4.3. Classification Measure
- a.
- Accuracy: It defines the percentage of accurate forecasts as all forecasts provided. The formula gives it:
- b.
- Precision: It may be defined as the fraction of valid positive classes relative to the total number of anticipated actual positive classes. It is calculated as:
- c.
- Recall (TPR, Sensitivity): It is calculated as:
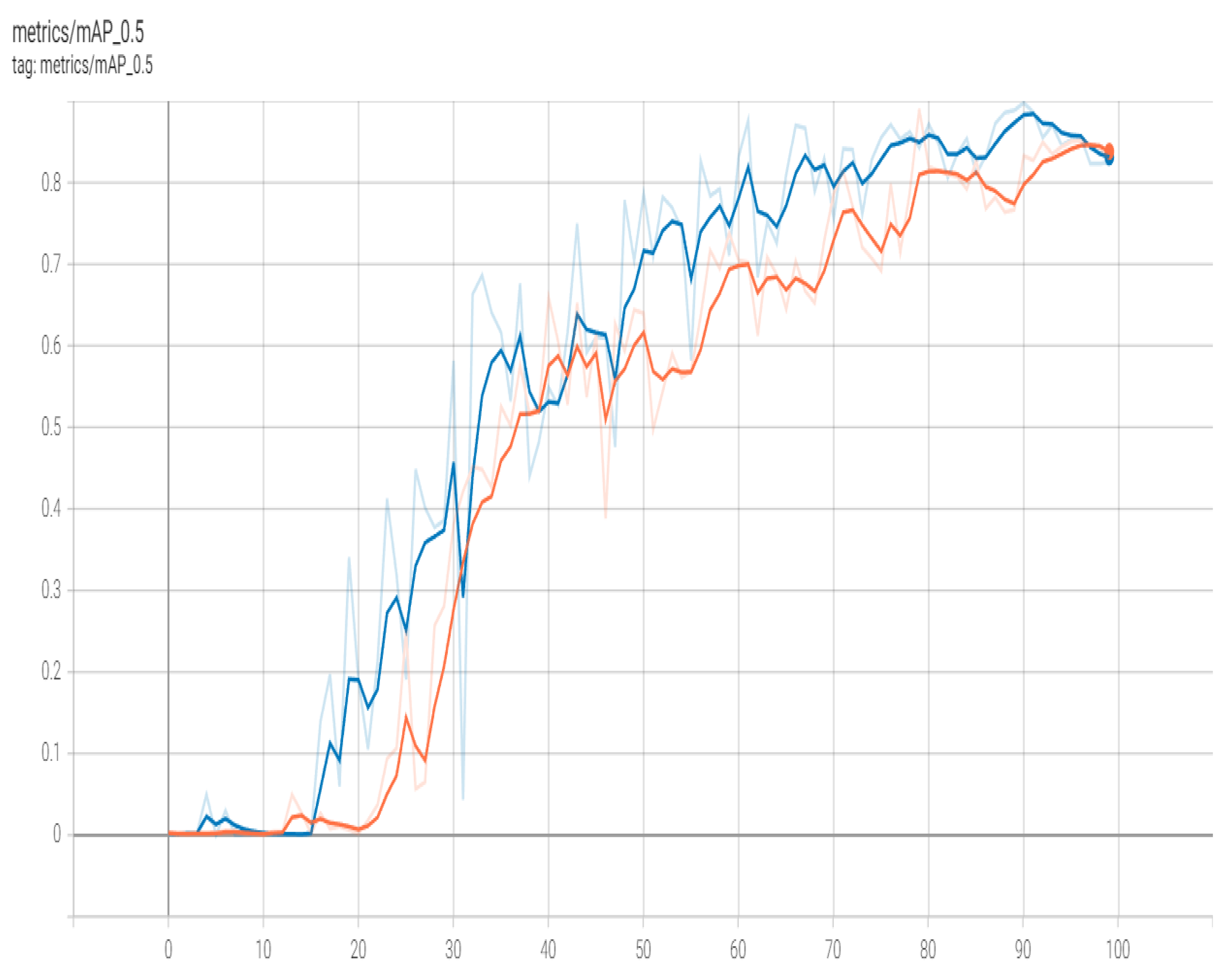
- Object detection accuracy is commonly measured using AP (average precision). The area under the aforementioned precision–recall curve is one way to quantify this.
- Training Loss evaluates how well a deep learning model fits the training data by measuring the model’s error on the training set. Figure 11 shows train obj_loss.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Momma, E.; Ono, T.; Ishii, H. Rock classification by types and degrees of weathering. In Proceedings of the 2006 SICE-ICASE International Joint Conference, Busan, Republic of Korea, 18–21 October 2006; pp. 149–156. [Google Scholar] [CrossRef]
- Yusoff, I.N.; Mohamad Ismail, M.A.; Tobe, H.; Date, K.; Yokota, Y. Quantitative granitic weathering assessment for rock mass classification optimization of tunnel face using image analysis technique. Ain Shams Eng. J. 2023, 14, 101814. [Google Scholar] [CrossRef]
- Zhang, H.; Xu, J.; Zou, S. A classification learning system based on multi-objective GA and microthermal weather forecast. In Proceedings of the 2nd International Conference on Digital Manufacturing and Automation, ICDMA 2011, Zhangjiajie, China, 5–7 August 2011; pp. 301–304. [Google Scholar] [CrossRef]
- Solis-Aulestia, M.; Pineda, I.; Piispa, E.J.; Williams, S.L. Evaluation of Evapotranspiration Classification Using Self-Organizing Maps and Weather Research and Forecasting Variables. In Proceedings of the International Geoscience and Remote Sensing Symposium (IGARSS), Kuala Lumpur, Malaysia, 17–22 July 2022; pp. 3195–3198. [Google Scholar] [CrossRef]
- Vasiliev, O.V.; Boyarenko, E.S.; Galaeva, K.I.; Zyabkin, S.A. Concerning the Issue of Classification of Hazardous Weather Events. In Proceedings of the 19th Technical Scientific Conference on Aviation Dedicated to the Memory of N.E. Zhukovsky, TSCZh 2022, Moscow, Russia, 14–15 April 2022; pp. 76–78. [Google Scholar] [CrossRef]
- Huang CM, T.; Huang, Y.C.; Huang, K.Y. A hybrid method for one-day ahead hourly forecasting of PV power output. In Proceedings of the 9th IEEE Conference on Industrial Electronics and Applications, ICIEA 2014, Hangzhou, China, 9–11 June 2014; pp. 526–531. [Google Scholar] [CrossRef]
- Trombe, P.J.; Pinson, P.; Madsen, H. Automatic classification of offshore wind regimes with weather radar observations. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 116–125. [Google Scholar] [CrossRef]
- Zhang, Z.; Ma, H. Multi-class weather classification on single images. In Proceedings of the 2015 IEEE International Conference on Image Processing (ICIP), Quebec City, QC, Canada, 27–30 September 2015; pp. 4396–4400. [Google Scholar]
- Mohapatra, A.G.; Lenka, S.K. Neural Network Pattern Classification and Weather Dependent Fuzzy Logic Model for Irrigation Control in WSN Based Precision Agriculture. Phys. Procedia 2016, 78, 499–506. [Google Scholar] [CrossRef]
- Roberto, N.; Baldini, L.; Adirosi, E.; Lischi, S.; Lupidi, A.; Cuccoli, F.; Barcaroli, E.; Facheris, L. Test and validation of particle classification based on meteorological model and weather radar simulator. In Proceedings of the 13th European Radar Conference, EuRAD 2016, London, UK, 5–7 October 2016; pp. 201–204. [Google Scholar]
- Lin, D.; Lu, C.; Huang, H.; Jia, J. RSCM: Region Selection and Concurrency Model for Multi-Class Weather Recognition. IEEE Trans. Image Process. 2017, 26, 4154–4167. [Google Scholar] [CrossRef] [PubMed]
- Lu, C.; Lin, D.; Jia, J.; Tang, C.K. Two-Class Weather Classification. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 2510–2524. [Google Scholar] [CrossRef] [PubMed]
- Pandey, A.K.; Agrawal, C.P.; Agrawal, M. A hadoop based weather prediction model for classification of weather data. In Proceedings of the 2nd IEEE International Conference on Electrical, Computer and Communication Technologies, ICECCT 2017, Coimbatore, India, 22–24 February 2017; pp. 1–5. [Google Scholar] [CrossRef]
- Kunjumon, C.; Nair, S.S.; Deepa Rajan, S.; Padma Suresh, L.; Preetha, S.L. Survey on Weather Forecasting Using Data Mining. In Proceedings of the IEEE Conference on Emerging Devices and Smart Systems, ICEDSS 2018, Tiruchengode, India, 2–3 March 2018; pp. 262–264. [Google Scholar] [CrossRef]
- Peng, X.; Fan, W.; Yang, F.; Che, J.; Wang, B. A short-term wind power prediction approach based on the dynamic classification of the weather types of wind farms. In Proceedings of the CIEEC 2017—Proceedings of 2017 China International Electrical and Energy Conference, Beijing, China, 25–27 October 2017; pp. 612–615. [Google Scholar] [CrossRef]
- Wang, S.; Li, Y.; Feng, S. A Multitask Learning Approach for Weather Classification on Railway Transportation. In Proceedings of the International Conference on Intelligent Rail Transportation, ICIRT 2018, Singapore, 12–14 December 2018. [Google Scholar] [CrossRef]
- Hongwei, X.; Fang, F.; Liu, J. Weather-Classification-MARS-Based Photovoltaic Power Forecasting for Energy Imbalance Market. IEEE Trans. Ind. Electron. 2019, 66, 8692–8702. [Google Scholar] [CrossRef]
- Shi, J.; Lee, W.J.; Liu, Y.; Yang, Y.; Wang, P. Forecasting power output of photovoltaic systems based on weather classification and support vector machines. IEEE Trans. Ind. Appl. 2012, 48, 1064–1069. [Google Scholar] [CrossRef]
- Zhang, Z.; Jin, Y.; Li, Y.; Lin, Z.; Wang, S. Imbalanced adversarial learning for weather image generation and classification. In Proceedings of the 14th IEEE International Conference on Signal Processing (ICSP), Beijing, China, 12–16 August 2018; pp. 1093–1097. [Google Scholar] [CrossRef]
- Wang, Y.; Li, Y.X. Research on Multi-class Weather Classification Algorithm Based on Multi-model Fusion. In Proceedings of 4th IEEE Information Technology, Networking, Electronic and Automation Control Conference, ITNEC 2020, Chongqing, China, 12–14 June 2020; pp. 2251–2255. [Google Scholar] [CrossRef]
- Lu, Z.; Ding, X.; Ren, Y.; Sun, X. Multi-Classification of Rainfall Weather Based on Deep Learning-Mod. In Proceedings of the 2020 39th Chinese Control Conference (CCC), Shenyang, China, 27–29 July 2020; pp. 6374–6379. [Google Scholar] [CrossRef]
- Li, L.W.; Chou, K.L.; Fu, R.H. Deep learning-based weather image recognition. In Proceedings of the 2018 International Symposium on Computer, Consumer and Control (IS3C), Taichung, Taiwan, 6–8 December 2018; pp. 384–387. [Google Scholar] [CrossRef]
- Zhang, H.; Zhao, X.; Zou, S. Neuron classification algorithm and megathermal weather forecast. In Proceedings of the 2011 3rd International Workshop on Intelligent Systems and Applications, Wuhan, China, 28–29 May 2011; pp. 24–27. [Google Scholar] [CrossRef]
- Wang, Z.W.; Zhang, C.L.; Su, C.; Cheng, C.L. On the modeling of atmospheric visibility classification forecast with nonlinear support vector machine. In Proceedings of the 5th International Conference on Natural Computation, ICNC 2009, Tianjian, China, 14–16 August 2009; pp. 240–244. [Google Scholar] [CrossRef]
- Bai, C.; Zhao, D.; Zhang, M.; Zhang, J. Multimodal Information Fusion for Weather Systems and Clouds Identification from Satellite Images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2022, 15, 7333–7345. [Google Scholar] [CrossRef]
- Alem, S.; Duan, L.; Zhang, Z.; Cao, X. Hierarchical Multimodal Fusion for Ground-Based Cloud Classification in Weather Station Networks. IEEE Access 2019, 7, 85688–85695. [Google Scholar] [CrossRef]
- Deng, X.; Ye, A.; Zhong, J.; Xu, D.; Yang, W.; Song, Z.; Zhang, Z.; Guo, J.; Wang, T.; Tian, Y.; et al. Bagging–XGBoost algorithm based extreme weather identification and short-term load forecasting model. Energy Rep. 2022, 8, 8661–8674. [Google Scholar] [CrossRef]
- Fang, C.; Lv, C.; Cai, F.; Liu, H.; Wang, J.; Shuai, M. Weather Classification for Outdoor Power Monitoring based on Improved SqueezeNet. In Proceedings of the 5th International Conference on Information Science, Computer Technology and Transportation, ISCTT 2020, Shenyang, China, 13–15 November 2020; pp. 11–15. [Google Scholar] [CrossRef]
- Yang, F.; Watson, P.; Koukoula, M.; Anagnostou, E.N. Enhancing Weather-Related Power Outage Prediction by Event Severity Classification. IEEE Access 2020, 8, 60029–60042. [Google Scholar] [CrossRef]
- Dalal, S.; Goel, P.; Onyema, E.M.; Alharbi, A.; Mahmoud, A.; Algarni, M.A.; Awal, H. Application of Machine Learning for Cardiovascular Disease Risk Prediction. Comput. Intell. Neurosci. 2023, 9418666. [Google Scholar] [CrossRef]
- Dalal, S.; Onyema, E.M.; Malik, A. Hybrid XGBoost model with hyperparameter tuning for prediction of liver disease with better accuracy. World J. Gastroenterol. 2022, 28, 6551–6563. [Google Scholar] [CrossRef] [PubMed]
- Huang, Y.; Jin, Y.; Li, Y.; Lin, Z. Towards Imbalanced Image Classification: A Generative Adversarial Network Ensemble Learning Method. IEEE Access 2020, 8, 88399–88409. [Google Scholar] [CrossRef]
- Goswami, S. Towards Effective Categorization of Weather Images using Deep Convolutional Architecture. In Proceedings of the 2020 International Conference on Industry 4.0 Technology, I4Tech 2020, Pune, India, 13–15 February 2020; pp. 76–79. [Google Scholar] [CrossRef]
- Baig, H.A.; Arshad, A.; Raza, A. Two class weather classification with bagging technique. In Proceedings of the 4th International Conference on Innovative Computing, ICIC 2021, Lahore, Pakistan, 9–10 November 2021; pp. 21–26. [Google Scholar] [CrossRef]
- Stepchenko, A.M. Land-Use Classification Using Convolutional Neural Networks. Autom. Control. Comput. Sci. 2021, 55, 358–367. [Google Scholar] [CrossRef]
- Gikunda, P.; Jouandeau, N. Homogeneous Transfer Active Learning for Time Series Classification. In Proceedings of the 20th IEEE International Conference on Machine Learning and Applications, ICMLA 2021, Pasadena, CA, USA, 13–16 December 2021; pp. 778–784. [Google Scholar] [CrossRef]
- Dalal, S.; Onyema, E.M.; Kumar, P.; Maryann, D.C.; Roselyn, A.O.; Obichili, M.I. A hybrid machine learning model for timely prediction of breast cancer. Int. J. Model. Simul. Sci. Comput. 2022, 2023, 410234. [Google Scholar] [CrossRef]
- Zhao, X.; Wu, C. Weather Classification Based on Convolutional Neural Networks. In Proceedings of the 2021 International Conference on Wireless Communications and Smart Grid, ICWCSG 2021, Hangzhou, China, 13–15 August 2021; pp. 293–296. [Google Scholar] [CrossRef]
- Shankarnarayan, V.K.; Ramakrishna, H. Comparative study of three stochastic future weather forecast approaches: A case study. J. Inf. Technol. Data Manag. 2021, 3, 3–12. [Google Scholar] [CrossRef]
- Malik, M.; Nandal, R.; Dalal, S.; Jalglan, V.; Le, D.-N. Deriving Driver Behavioral Pattern Analysis and Performance Using Neural Network Approaches. Intell. Autom. Soft Comput. 2022, 32, 87–99. [Google Scholar] [CrossRef]
- Purwandari, K.; Sigalingging, J.W.; Cenggoro, T.W.; Pardamean, B. Multi-class Weather Forecasting from Twitter Using Machine Learning Aprroaches. Procedia Comput. Sci. 2021, 179, 47–54. [Google Scholar] [CrossRef]
- Dash, R.; Dash, D.K.; Biswal, G. Classification of crop based on macronutrients and weather data using machine learning techniques. Results Eng. 2021, 9, 100203. [Google Scholar] [CrossRef]
- Tian, M.; Chen, X.; Zhang, H.; Zhang, P.; Cao, K.; Wang, R. Weather classification method based on spiking neural network. In Proceedings of the 2021 International Conference on Digital Society and Intelligent Systems, DSInS 2021, Chengdu, China, 3–4 December 2021; pp. 134–137. [Google Scholar] [CrossRef]
- Cheng, Q.; Wu, Z.; Min, J. Foggy Weather Monitoring Method Based on Improved Deep Residual Shrinkage Network and Radio Signal. In Proceedings of the 3rd International Conference on Geology, Mapping and Remote Sensing, ICGMRS 2022, Zhoushan, China, 22–24 April 2022; pp. 495–499. [Google Scholar] [CrossRef]
- Abu-Abdoun, D.I.; Al-Shihabi, S. Weather Conditions and COVID-19 Cases: Insights from the GCC Countries. Intell. Syst. Appl. 2022, 200093. [Google Scholar] [CrossRef]
- Ali, E.M.; Ahmed, M.M. Employment of instrumented vehicles to identify real-time snowy weather conditions on freeways using supervised machine learning techniques—A naturalistic driving study. IATSS Res. 2022, 46, 525–536. [Google Scholar] [CrossRef]
- Malik, M.; Nandal, R.; Dalal, S.; Maan, U.; Le, D.-N. An efficient driver behavioral pattern analysis based on fuzzy logical feature selection and classification in big data analysis. J. Intell. Fuzzy Syst. 2022, 43, 3283–3292. [Google Scholar] [CrossRef]
- Chen, B.; Wang, Y.; Huang, J.; Zhao, L.; Chen, R.; Song, Z.; Hu, J. Estimation of near-surface ozone concentration and analysis of main weather situation in China based on machine learning model and Himawari-8 TOAR data. Sci. Total. Environ. 2023, 864, 160928. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| S. No. | Paper | Method | Dataset | Result |
|---|---|---|---|---|
| 1 | Wang et al. [16] | SVM | Weather stations ROSA | 90% of forecast classification errors |
| 2 | Hongwei et al. [17] | GA | Meteorological data in Northern Zhejiang | 75% correct rate |
| 3 | Shi et al. [18] | SVM | PV power system in south China | 8.64 MREdata (%) |
| 4 | Zhang et al. [19] | multiple kernel learning | MWI (Multi-class Weather Image) | Accuracy 0.5944 |
| 5 | Wang et al. [20] | Multitask learning | multi-class weather dataset | MSE 0.79167 |
| 6 | Lu et al. [21] | CNN | weather dataset having 10,000 images | Accuracy 91.4% |
| 7 | Li et al. [22] | Generative adversarial networks (GAN) | MWI, MWD datasets | Accuracy 0.9809 |
| 8 | Zhang et al. [23] | multivariate adaptive regression spline | China radiation date dataset | MAE 0.689 |
| 9 | Wang et al. [24] | ResNet and DenseNet | 12,000 pictures dataset | Accuracy 72.25% |
| 10 | Bai et al. [26] | Multimodal Information Fusion | LSCIDMR dataset | Accuracy 98.46% |
| 11 | Alem et al. [25] | Convolutional Neural Network | UCM dataset | Precision 0.89 |
| 12 | Deng et al. [27] | XGBoost algorithm | 1120 pictures dataset | MAPE 10% |
| Optimizer | Images | Precision | Recall | mAP@.5 | mAP@.5:.95 |
|---|---|---|---|---|---|
| SGD Optimizer | 1499 | 0.857 | 0.816 | 0.055 | 0.019 |
| Bayesian Optimizer | 1499 | 0.935 | 0.830 | 0.704 | 0.349 |
| LwF Optimizer | 1499 | 0.988 | 0.908 | 0.819 | 0.569 |
| S. No. | Paper | Methods | Accuracy (%) |
|---|---|---|---|
| 1 | Wang et al. [16] | SVM | 90 |
| 2 | Hongwei et al. [17] | GA | 75 |
| 3 | Zhang et al. [19] | multiple kernel learning | 59.44 |
| 4 | Lu et al. [21] | CNN | 91.4 |
| 5 | Li et al. [22] | Generative adversarial networks (GAN) | 98.09 |
| 6 | Wang et al. [24] | ResNet and DenseNet | 72.25 |
| 7 | Bai et al. [26] | Multimodal Information Fusion | 98.46 |
| 8 | Proposed Model | Yolo Model with LwF | 99.19% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dalal, S.; Seth, B.; Radulescu, M.; Cilan, T.F.; Serbanescu, L. Optimized Deep Learning with Learning without Forgetting (LwF) for Weather Classification for Sustainable Transportation and Traffic Safety. Sustainability 2023, 15, 6070. https://doi.org/10.3390/su15076070
Dalal S, Seth B, Radulescu M, Cilan TF, Serbanescu L. Optimized Deep Learning with Learning without Forgetting (LwF) for Weather Classification for Sustainable Transportation and Traffic Safety. Sustainability. 2023; 15(7):6070. https://doi.org/10.3390/su15076070
Chicago/Turabian StyleDalal, Surjeet, Bijeta Seth, Magdalena Radulescu, Teodor Florin Cilan, and Luminita Serbanescu. 2023. "Optimized Deep Learning with Learning without Forgetting (LwF) for Weather Classification for Sustainable Transportation and Traffic Safety" Sustainability 15, no. 7: 6070. https://doi.org/10.3390/su15076070
APA StyleDalal, S., Seth, B., Radulescu, M., Cilan, T. F., & Serbanescu, L. (2023). Optimized Deep Learning with Learning without Forgetting (LwF) for Weather Classification for Sustainable Transportation and Traffic Safety. Sustainability, 15(7), 6070. https://doi.org/10.3390/su15076070