


Analysis of the Effect of Providing Pedestrian Crossing Information at the Blind Spots of Intersections on Vehicle Traffic


Abstract
1. Introduction
2. Literature Review
3. Pedestrian Crossing Information Notification System
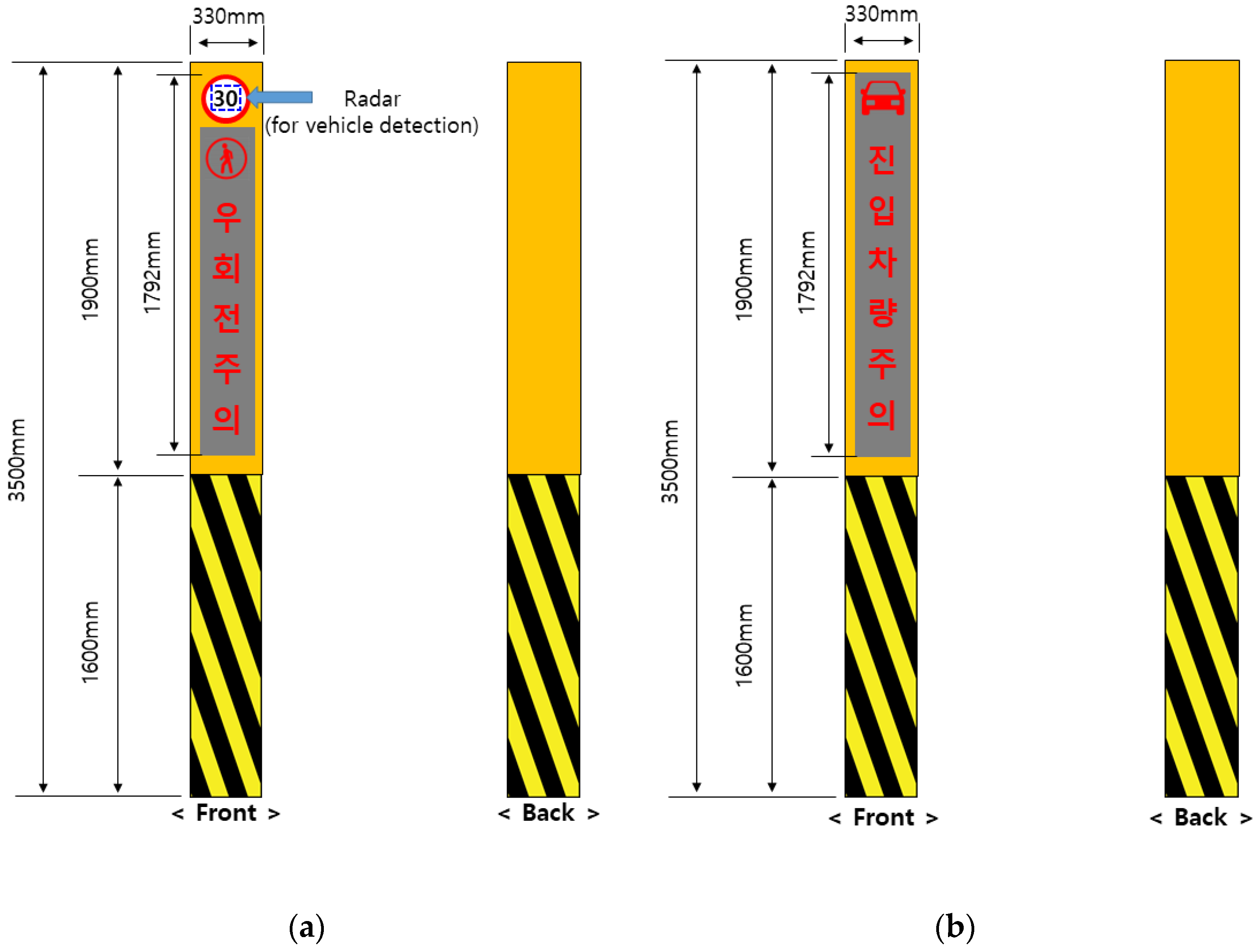
3.1. System Configuration and Notification Service
3.2. Data Collection
4. Analysis Results
4.1. Change in Point Speed
4.2. Change in Speed Limit Compliance Rate
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- World Health Organization. Global Status Report on Road Safety 2018. Available online: https://www.who.int/publications/i/item/9789241565684 (accessed on 17 January 2022).
- The Road Traffic Authority. 2020 Statistic Analysis of Traffic Accident; The Road Traffic Authority: Wonju-si, Republic of Korea, 2021. [Google Scholar]
- TAAS. Available online: http://taas.koroad.or.kr/ons/omp/mcm/initOecd.do?menuId=ONS_OMP (accessed on 4 January 2022).
- Kim, B.G.; Jeong, C.W.; Lee, W.G. A Study on Establishment of Discriminant and Classification Models according to the Occurrence of a Traffic Accident Type. J. Police Sci. 2011, 11, 171–206. [Google Scholar]
- Lee, S.C. The characteristics of pedestrians accident: Analysising the conflict behavior between pedestrians and drivers. Korean J. Psychol. Soc. Issues 2000, 6, 159–174. [Google Scholar]
- Larue, G.S.; Watling, C.N. Acceptance of visual and audio interventions for distracted pedestrians. Transp. Res. Part F 2021, 76, 369–383. [Google Scholar] [CrossRef]
- Osborne, R.; Horberry, T.; Young, K.L. Pedestrian distraction from Smartphones: An end-user perspective on current and future countermeasures. Transp. Res. Part F 2020, 73, 348–361. [Google Scholar] [CrossRef]
- Lin, M.-I.B.; Huang, Y.P. The impact of walking while using a smartphone on pedestrians’ awareness of roadside events. Accid. Anal. Prev. 2017, 101, 87–96. [Google Scholar] [CrossRef]
- Nasar, J.L.; Troyer, D. Pedestrian injuries due to mobile phone use in public places. Accid. Anal. Prev. 2013, 57, 91–95. [Google Scholar] [CrossRef]
- ITARDA. ITARDA. Accidents Resulting in Pedestrian Fatalities Occur Most Frequently with Vehicle Proceeding Straight Ahead. ITARDA Information. 2012. No. 94. Available online: https://www.itarda.or.jp/contents/68/info94_e.pdf (accessed on 17 January 2022).
- Habibovic, A.; Tivesten, E.; Uchida, N.; Bärgman, J.; Ljung Aust, M. Driver behavior in car-to-pedestrian incidents: An application of the driving reliability and error analysis method (DREAM). Accid. Anal. Prev. 2013, 50, 554–565. [Google Scholar] [CrossRef]
- Yonhap News. Available online: https://www.yna.co.kr/view/AKR20211210042800065 (accessed on 4 January 2022).
- Incheonin. Available online: http://www.incheonin.com/news/articleView.html?idxno=84545 (accessed on 4 January 2022).
- Yonhap News. Available online: https://www.yna.co.kr/view/AKR20211230023300004 (accessed on 4 January 2022).
- Rosen, E.; Stigson, H.; Sander, U. Literature review of pedestrian fatality risk as a function of car impact speed. Accid. Anal. Prev. 2011, 43, 25–33. [Google Scholar] [CrossRef]
- Nilsson, G. Traffic Safety Dimensions and the Power Model to Describe the Effect of Speed on Safety; Bulletin 221; Lund Institute of Technology, Department of Technology and Society, Traffic Engineering: Lund, Switzerland, 2004. [Google Scholar]
- Rosén, E.; Sander, U. Pedestrian fatality risk as a function of car impact speed. Accid. Anal. Prev. 2009, 41, 536–542. [Google Scholar] [CrossRef]
- Hussain, Q.; Feng, H.; Grzebieta, R.; Brijs, T.; Olivier, J. The relationship between impact speed and the probability of pedestrian fatality during a vehicle-pedestrian crash: A systematic review and meta-analysis. Accid. Anal. Prev. 2019, 129, 241–249. [Google Scholar] [CrossRef]
- Aarts, L.; Schagen, I.V. Driving speed and the risk of road crashes: A review. Accid. Anal. Prev. 2006, 38, 215–224. [Google Scholar] [CrossRef]
- Hakkert, A.S.; Gitelamn, V.; Ben-Shabat, E. An evaluation of crosswalk warning systems: Effects on pedestrian and vehicle behaviour. Transp. Res. Part F 2002, 5, 275–292. [Google Scholar] [CrossRef]
- Costa, M.; Lantieri, C.; Vignali, V.; Chasemi, N.; Simone, A. Evaluation of an integrated lighting-warning system on motorists’ yielding at unsignalized crosswalks during nighttime. Transp. Res. Part F 2020, 68, 132–143. [Google Scholar] [CrossRef]
- Hong, K.M.; Son, S.H.; Kim, J.H. Effectiveness of Pedestrian Safety Service Provision Using Sensing Technology. Sustainability 2021, 13, 9333. [Google Scholar] [CrossRef]
- Jin, M.S.; Lee, S.K. Pedestrians and Drivers Behaviour Change by Installation of Crossing Safety Assistant System. J. Korea Inst. Intell. Transp. Syst. 2016, 15, 85–93. [Google Scholar] [CrossRef]
- Ross, J.; Serpico, D.; Lewis, R. Assessment of Driver Yielding Rates Pre- and Post RRFB Installation, Bend, Oregon; Report No. FHWA-OR-RD-12-05; FHWA: Washington, DC, USA, 2011. [Google Scholar]
- Foster, N.; Monsere, C.M.; Carlos, K. Evaluating driver and pedestrian behaviours at enhanced, multilane, midblock pedestrian crossings case study in Portland, Oregon. Transp. Res. Rec. 2014, 2464, 59–66. [Google Scholar] [CrossRef]
- Al-Kaisy, A.; Miyake, G.T.; Staszcuk, J.; Scharf, D. Motorists’ voluntary yielding of right of way at uncontrolled midblock crosswalks with rectangular rapid flashing beacons. J. Transp. Saf. Secur. 2018, 10, 303–317. [Google Scholar] [CrossRef]
- Fitzpatrick, K.; Potts, I.B.; Brewer, M.A.; Averal, R. Comparison of rectangular and circular rapid-flashing beacons in an open- road setting. Transp. Res. Rec. 2015, 2492, 69–77. [Google Scholar] [CrossRef]
- Fitzpatrick, K.; Park, E.S. Nighttime effectiveness of the pedestrian hybrid beacon, rectangular rapid flashing beacon, and LED-embedded crossing sign. J. Saf. Res. 2021, 79, 273–286. [Google Scholar] [CrossRef]
- Hoye, A.; Laureshyn, A. SeeMe at the crosswalk—Befor-after study of a pedestrian crosswalk warning system. Transp. Res. Part F 2019, 60, 723–733. [Google Scholar] [CrossRef]
- Shurbutt, J.; Van Houten, R. Effects of Yellow Rectangular Rapid-Flashing Beacons on Yielding at Multilane Uncontrolled Crosswalks; Report No. FHWA-HRT-10-043; Western Michigan University, Psychology Department: Kalamazoo, MI, USA, 2010. [Google Scholar]
- Van Houten, R.; Ellis, R.; Marmolejo, E. Stutter-flash light-emitting-diode beacons to increase yielding to pedestrians at crosswalks. Transp. Res. Rec. 2008, 2073, 69–78. [Google Scholar] [CrossRef]
- Pilkington, P.; Kinra, S. Effectiveness of speed cameras in preventing road traffic collisions and related casualties: Systematic review. Br. Med. J. 2005, 330, 331–334. [Google Scholar] [CrossRef] [PubMed]
- Pichayapan, P.; Kaewmoracharoen, M.; Peansara, T.; Nanthavisit, P. Urban School Area Road Safety Improvement and Assessment with a 3D Piano-Keyboard-Styled Pedestrian Crossing Approach: A Case Study of Chiang Mai University Demonstration School. Sustainability 2020, 12, 6464. [Google Scholar] [CrossRef]
- Yan, X.; Wu, J. Effectiveness of variable message signs on driving behavior based on a driving simulation experiment. Discret. Dyn. Nat. Soc. 2014, 2014, 206805. [Google Scholar] [CrossRef]
- Jamson, H.A.; Merat, N. The effectiveness of safety campaign VMS messages a driving simulator investigation. In Proceedings of the 4th International Driving Symposium on Human Factors in Driver Assessment, Training and Vehicle Design, Stevenson, WA, USA, 9–12 July 2007; pp. 459–465. [Google Scholar]
- Boyle, L.N.; Mannering, F. Impact of traveler advisory systems on driving speed: Some new evidence. Transp. Res. Part C 2002, 12, 57–72. [Google Scholar] [CrossRef]
- Cho, H.J.; Lee, S.H. A Study on Safety Impacts for VMS Traffic Information. J. Korea Inst. Intell. Transp. Syst. 2015, 14, 22–30. [Google Scholar]
- Kim, S.H.; Choi, K.C.; Yu, J.W. Driver Route Choice Models for Developing Real-Time VMS Operation Strategies. J. Korean Soc. Civ. Eng. D 2006, 26, 409–416. [Google Scholar]
- Lim, S.J.; Lee, J.D.; Park, H.K.; Lee, K.H.; Moon, K.S.; Oah, S.Z. The Effect of VMS Message Presentation Type on the Speed Reduction of Driving Vehicle in School Zone. J. Korea Inst. Intell. Transp. Syst. 2018, 17, 89–99. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Date and Time Band | Number of Samples |
|---|---|---|
| Before installation | 2021.09.14 (08:20–09:30), 2021.09.15 (19:00–20:30) | 178 |
| After installation | 2021.10.27 (13:15–14:20), 2021.10.28 (17:30–18:55) | 166 |
| Category | Point Speed (km/h) | Variance | Standard Deviation | Number of Samples | |||
|---|---|---|---|---|---|---|---|
| Average | Min. | Max. | |||||
| Before installation | Straight-ahead-moving vehicle (A) | 22.38 | 10.97 | 36.87 | 29.81 | 5.46 | 134 |
| Right-turning vehicle (B) | 20.86 | 10.66 | 45.46 | 30.88 | 5.56 | 44 | |
| Difference (B-A) | 1.52 | - | - | - | - | - | |
| Sum | - | - | - | - | - | 178 | |
| After installation | Straight-ahead-moving vehicle (A’) | 21.82 | 10.04 | 35.51 | 21.89 | 4.68 | 124 |
| Right-turning vehicle (B’) | 21.55 | 15.15 | 30.57 | 16.93 | 4.11 | 42 | |
| Difference (B’-A’) | 0.26 | - | - | - | - | - | |
| Sum | - | - | - | - | - | 166 | |
| Category | Before Installation | After Installation |
|---|---|---|
| t-value | −1.5948 | −0.3243 |
| p-value | 0.1126 | 0.7461 |
| Category | Before Installation (A) | After Installation (B) | Difference (B-A) | t-Test | p-Value | |
|---|---|---|---|---|---|---|
| Average point speed (km/h) | Whole | 22.01 | 21.75 | −0.26 | 0.4682 | 0.6399 |
| With pedestrians | 22.11 | 21.28 | −0.83 | 1.2280 | 0.2208 | |
| Without pedestrians | 21.75 | 22.28 | 0.54 | −0.5524 | 0.5817 | |
| Category | Before Installation (A) | After Installation (B) | Difference (B-A) | |
|---|---|---|---|---|
| Compliance rate under 30 km/h speed limit (%) | Whole | 93.26 | 95.78 | 2.52 |
| With pedestrians | 92.97 | 100.00 | 7.03 | |
| Without pedestrians | 94.00 | 91.03 | −2.97 | |
| Category | Compliance with the Speed Limit | X2/p | Phi/p | |||
|---|---|---|---|---|---|---|
| Non-Compliance (0) | Observance (1) | |||||
| With pedestrians | Before installation | Frequency | 9 | 119 | 6.457/0.011 | 0.173/0.011 |
| Expected frequency | 5.3 | 122.7 | ||||
| After installation | Frequency | 0 | 88 | |||
| Expected frequency | 3.7 | 84.3 | ||||
| All | Frequency | 9 | 207 | |||
| Expected frequency | 9.0 | 207 | ||||
| Without pedestrians | Before installation | Frequency | 3 | 47 | 0.374/0.541 | −0.054/0.541 |
| Expected frequency | 3.9 | 46.1 | ||||
| After installation | Frequency | 7 | 71 | |||
| Expected frequency | 6.1 | 71.9 | ||||
| All | Frequency | 10 | 118 | |||
| Expected frequency | 10.0 | 118.0 | ||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hong, K.-M.; Kim, J.-H.; Ha, J.-A.; Kim, G.-H.; Kim, J.-H. Analysis of the Effect of Providing Pedestrian Crossing Information at the Blind Spots of Intersections on Vehicle Traffic. Sustainability 2023, 15, 2718. https://doi.org/10.3390/su15032718
Hong K-M, Kim J-H, Ha J-A, Kim G-H, Kim J-H. Analysis of the Effect of Providing Pedestrian Crossing Information at the Blind Spots of Intersections on Vehicle Traffic. Sustainability. 2023; 15(3):2718. https://doi.org/10.3390/su15032718
Chicago/Turabian StyleHong, Ki-Man, Jong-Hoon Kim, Jung-Ah Ha, Gwang-Ho Kim, and Jong-Hoon Kim. 2023. "Analysis of the Effect of Providing Pedestrian Crossing Information at the Blind Spots of Intersections on Vehicle Traffic" Sustainability 15, no. 3: 2718. https://doi.org/10.3390/su15032718
APA StyleHong, K.-M., Kim, J.-H., Ha, J.-A., Kim, G.-H., & Kim, J.-H. (2023). Analysis of the Effect of Providing Pedestrian Crossing Information at the Blind Spots of Intersections on Vehicle Traffic. Sustainability, 15(3), 2718. https://doi.org/10.3390/su15032718