Abstract
Fuel cell hybrid electric vehicles (FCEVs) are mainly electrified by the fuel cell (FC) system. As a supplementary power source, a battery or supercapacitor (SC) is employed (besides the FC) to enhance the power response due to the slow dynamics of the FC. Indeed, the performance of the hybrid power system mainly depends on the required power distribution manner among the sources, which is managed by the energy management strategy (EMS). This paper considers an FCEV based on the proton exchange membrane FC (PEMFC)/battery/SC. The energy management strategy is designed to ensure optimum power distribution between the sources considering hydrogen consumption. Its main objective is to meet the electric motor’s required power with economic hydrogen consumption and better electrical efficiency. The proposed EMS combines the external energy maximization strategy (EEMS) and the bald eagle search algorithm (BES). Simulation tests for the Extra-Urban Driving Cycle (EUDC) and New European Driving Cycle (NEDC) profiles were performed. The test is supposed to be performed in typical conditions t = 25 °C on a flat road without no wind effect. In addition, this strategy was compared with the state machine control strategy, classic PI, and equivalent consumption minimization strategy. In terms of optimization, the proposed approach was compared with the original EEMS, particle swarm optimization (PSO)-based EEMS, and equilibrium optimizer (EO)-based EEMS. The results confirm the ability of the proposed strategy to reduce fuel consumption and enhance system efficiency. This strategy provides 26.36% for NEDC and 11.35% for EUDC fuel-saving and efficiency enhancement by 6.74% for NEDC and 36.19% for EUDC.
1. Introduction
The demand for fossil fuels has grown during the industrial period. Burning fossil fuels has resulted in an increase in global carbon dioxide emissions, exacerbating global warming. According to the US department of energy (DoE), the transportation sector consumes more than 28% of the total electrical power [1]. As an alternative fuel, hydrogen may be created by reforming carbon-based fuels (grey and blue hydrogen) or by operating water with electricity generated from renewable resources (green hydrogen). Electric vehicles are a promising solution to decarbonize the transport sector [2]. The fuel cell hybrid electric vehicle (FCEV) is one of the most promising solutions that reduce carbon dioxide emissions. FCEV technology combines an energy storage system (ESS) with hydrogen fuel cell(s) (FC) to supply an electrical motor [3]. FCEV technology provides better energy savings and fuel economy [4]. FCEV has many benefits, such as high performance with no pollutant emissions, quiet operation, small size, and no reliance on fossil fuels [5]. To achieve this, the US Department of Energy (DOE) has established two 2025 fuel cell standards that must be accomplished simultaneously: a cost target of 40$/kW net and a durability target of 5000 h. Targets for performance and longevity at their highest levels are 30$/kW net and 8000 h [6]. As a result, electric vehicles (EVs) are expected to be heavily incorporated into future smart grids due to their critical role in creating a safe environment and sustainable transportation sector [7].
Since the FCEV power system is entirely electrical, the ESS (batteries and/or supercapacitors) recover or provide high power peaks during braking or accelerating [8]. Because of the slow dynamics of the fuel cell and the limited battery charging/discharging cycles, hybridization with a high specific energy storage system, such as supercapacitors (SCs) that have fast dynamics, is required to overcome these issues and to enhance the overall performance [9]. The hybridization provides the FC system with better operating conditions, increasing FC system performance. This hybrid multisource system requires an energy management strategy (EMS) that controls the power flow to reduce fuel consumption and enhance system efficiency. In other words, the EMS functions as a power splitter for energy from both primary and auxiliary sources [10]. However, the primary concern in EMSs is the efficiency of the chosen strategy or control approach. To this end, different EMSs have been widely reported in the literature. EMSs can be divided into two classes [11]: rule-based and optimization-based EMSs.
Rule-based strategies represent strategies that depend on the operating system state. This class has two subclasses: deterministic rule-based and fuzzy rules-based. The state machine control strategy (SMC) is one most used deterministic rule-based [12]. However, fuzzy logic is the most adopted EMS in this category based on fuzzy logic controllers [13]. Although it is easy to design and implement, it is still based on the designer’s knowledge, which limits its performance [14]. The optimization strategies are based on the objective function’s minimization or maximization. There are two subclasses: offline (global) and online optimization strategies (real-time). Developing the EMS as an offline optimization problem involves solving an optimal control problem over an a priori known mission (speed profile). There are different approaches:
- Direct methods (disciplined optimal control).
- Indirect methods (Pontryagin’s maximum principle (PMP) [15], calculus of variations [16]).
- Dynamic programming (DP) [17] and stochastic dynamic programming (SDP) [18].
These strategies require knowledge of the total load profiles, which results in enormous amounts of data to calculate. The decision of the online strategies is based on the evolution of objective function value, which makes them more robust with high performance. These strategies typically include equivalent consumption minimization strategy (ECMS) [19] and external energy maximization strategy (EEMS) [20]. Real-time strategies are necessarily suboptimal. ECMS is derived from optimal control theory. According to [21], the ECMS is designed and demonstrated based on the PMP strategy. The equivalent factor plays the same role as the co-state of the PMP approach. So ECMS with a constant co-state is an optimal solution to the offline optimization problem [22]. Since the EEMS system aims to maximize the power that comes from the SC and the battery, the overall system efficiency will be implicitly improved. In addition, the FC has limited dynamics and supplies only the steady state load. The SC and the battery are the sources that meet the transitory loads. Hence, this will enhance the system’s efficiency.
A set of published works are listed in Table 1. This table includes the details of each reported EMS such as the used EMSs, the advantages, the drawbacks, and its application either online or offline. Most of the reported works in this table use the online strategy. This can be explained by the ability of online strategies to adapt to various operating conditions.

Table 1.
Summary of some published works.
Several studies confirmed that hybridizing metaheuristic algorithms (MAs) and online EMSs could provide the best performance. These algorithms have gained enormous popularity in these engineering applications [34]. Hegazy et al. [35] proposed an optimized version of ECMS and EEMS based on the mine blast algorithm (MBA) and the salp swarm algorithm (SSA). The combination between the SSA and EEMS provides optimal efficiency and fuel consumption performance. A similar comparative study was performed by Zhao et al. [36]; in this paper, different meta-heuristic optimization algorithms were used, including the artificial bee colony (ABC), grey wolf optimization (GWO), electromagnetic field optimization (EFO), cuckoo search (CS), MBA, moth swarm algorithm (MSA), harmony search (HS), modified flower pollination algorithm (MFPA), and whale optimization algorithm (WOA). The obtained results provide the optimized EEMS with the GWO over the ECMS and its optimized versions. Genetic fuzzy-based EMS was proposed in [37] to improve fuel economy. Optimized EMS based on the genetic algorithm was proposed in [38]. This paper includes a review of different FCEV topologies.
The FC/battery used topology has been used in the literature; its benefits were approved [39]. However, introducing the SC can enhance the battery lifecycle due to its fast dynamics. In addition, this paper provides and approves an optimized version of the EEMS that requires an SC connected to the DC bus. For these reasons, the FC (FPEMC)/battery/supercapacitor FCEV semi-active topology was chosen. The studied power system is illustrated in Figure 1. The proposed EMS is optimized by a modern optimization MA called the bald eagle search (BES) algorithm. The BES algorithm has provided excellent performance for many online and offline applications compared to other classical and recent algorithms ([40,41,42]). This high performance is due to a unique updating mechanism that uses three phases: select space, search in the space, and swooping. Each phase contributes effectively to finding the optimal results. In this study, it is assumed that the battery state of charge (SoC) is known (measurable), as well as the load demand. The main contribution of this study is to benefit from the high performance of the BES to reduce hydrogen consumption while improving the electrical efficiency of the power system. This paper presents the first use of this algorithm in this kind of application. Its practical applicability can provide the EV with a better driving experience where the economized fuel can allow longer driving distances, and the enhanced efficiency enables better energy economy. The proposed EMS is compared in terms of fuel consumption and system efficiency with the original EEMS and particle swarm optimization (PSO) [43] and equilibrium optimizer (EO) [44]. To make it clear, the main contribution of this paper is in providing an optimized version of the conventional EEMS that effectively reduces fuel consumption while enhancing electrical efficiency.
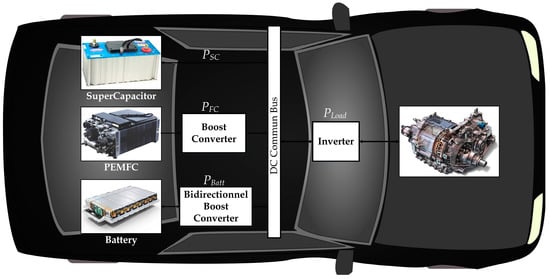
Figure 1.
The FHEV power system topology.
The rest of the paper is organized as follows: Section 2 presents the FCEV architecture, including the used mathematical models; Section Section 3 explains the energy management strategy, including the EEMS and the BES algorithms; the results and discussion are provided in Section 4, including the simulation results and analysis; this paper ends with a conclusion in Section 5.
2. FCEV Architecture
As illustrated in Figure 1, the FCEV is powered by three energy sources: proton exchange membrane fuel cell (PEMFC) as the primary source, lithium-ion battery, and supercapacitor energy storage systems (EESs). The fuel cell is connected to the DC bus through a unidirectional DC/DC boost converter. A bidirectional DC/DC boost is used to connect the battery. The SC is connected directly to the DC bus. On the other side, the vehicle motor is supplied utilizing a bidirectional DC/AC inverter that allows the power to flow in two directions, from the DC bus to the motor in the traction case and the opposite in the breaking case.
2.1. Vehicle Traction Model
The traction force can be calculated according to the physical forces applied to the vehicle body as follows [45]
where FT is the traction force, Fr is the rolling resistance force, Fad is the aerodynamic force, FU is the gradeability or uphill driving force, and Fm is the motor force. Each force can be calculated as follows
where ρ is the air density; v is the vehicle speed; A is the frontal area; Cd is the drag coefficient.
where mv is the vehicle mass; g is the gravity acceleration; cos(α) represents the influence of a non-horizontal road; α is the read slop; cr is the rolling friction coefficient depending on the vehicle speed, tire pressure, road surface conditions, etc.
where a is the acceleration, Jem is the motor inertia, Rtire is the tire radius. An illustration of these forces is presented in Figure 2.
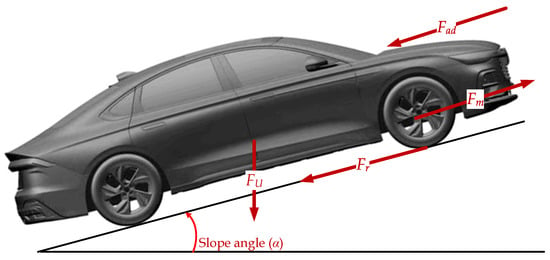
Figure 2.
The FHEV power system topology.
From Equation (1), the required power by the traction motor on the DC bus can be calculated as follows [46]
where ηmot and ηtrans are the electrical and mechanical transmission efficiencies, respectively, ηinv is the inverter efficiency, and v(t) is the DC bus voltage.
2.2. FC hydrogen Consumption Model
FC is an electrochemical device that converts the converter chemical energy of hydrogen and oxygen to electrical power. According to [47], hydrogen consumption is related to the FC output current as follows
where CH2 describes the hydrogen consumption rate (g/s), ncell is the number of cells, MH2 denotes the hydrogen molar mass (2.02 g/mol), iFC is the FC output current (A), and F is the Faraday constant (96, 487 C).
2.3. Battery State of Charge Estimation Model
According to the published works in [48], the battery state of charge (SoC) can be calculated as follows
where SoC0 is the initial SoC (%), Q is the nominal battery capacity (Ah), and iBatt is the battery current (A).
3. The Proposed Energy Management Strategy
The energy management strategy was developed to minimize fuel consumption, extend the battery and supercapacitor lifespans, and maximize overall efficiency.
3.1. Problem Formulation
As mentioned above, the EEMS is an RTO strategy that aims to minimize fuel consumption by maximizing the battery and SC energy requests within their operational limitations [20]. Therefore, the studied problem is an optimization problem where the objective function to minimize (J) is given in Equation (9), and the decision variables are v = [PBatt, ΔV]. The objective function can be formulated as
PBatt is the battery power, Ts is the sampling time, ΔV is the charge/discharge voltage, and CSC is the SC-rated capacity. The decision variables are bounded as
where and are the battery’s min and max output power, and are the min and max DC bus voltage limits.
This objective function is submitted to the following constraint
SoC is the battery state of charge, SoCmin is the battery’s lower SoC, VBatt, and QBatt are the battery voltage and capacity, respectively. This equation determines the maximum possible power by considering the difference between the actual SoC and its minimum limit value. The optimization variables have the following constraints.
The power reference for the battery and the FC can be formulated as follows
In fact, the DC bus voltage is regulated using the battery system. The PI regulator generates the battery power reference and ensures a stable DC bus voltage [30]. The operating scheme is illustrated in Figure 3.
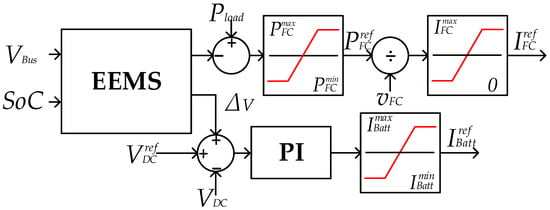
Figure 3.
EEMS scheme.
3.2. Bald Eagle Search Algorithm
The bald eagle search (BES) algorithm is a recent metaheuristic optimization algorithm (MA) that was inspired by the searching and hunting strategy of the bald eagle [49]. The fundamental idea of BES is to simulate the movement and hunting process of a bald eagle hunting process. Mainly, there are three phases: select space, search, and swooping.
- Select space: the eagle starts from random positions and searches to detect prey space based on the following equationwhere Pnew is the newly generated positions, Pbest is the prey location (best position), α is a controlling factor [1.5,2], and r is a random number in [0,1], Pm is the mean of the current positions. According to the fitness of the new positions, Pbest will be updated.
- 2.
- Searching in the space: In this phase, the eagle explores the search space as followswhere Pnew(i) is the i-th newly generated positions, x and y are their directional coordinates that can be defined aswhere r is the radius and rx and ry are its comports, x and y can be obtained by normalizing rx and ry, a is a controlling factor utilized to determine the corner between point search in the central point, it takes value in [5, 10], R is a parametric gain in [0.5, 2] utilized to determine the number of search cycles. Pbest value will be updated according to the obtained fitness of Pnew.
- 3.
- Swooping: the eagle suddenly attacks the prey from the best-obtained position according to the following equationwhere c1 and c2 are random factors [1, 2], Pmean is the mean of the current positions, x1 and y1 are the directional coordinates of each position. They can be expressed as
The BES will be used to optimize the EEMS objective function. The main objective is to minimize fuel consumption and enhance the overall efficiency compared with the original EEMS. The BES flowchart is illustrated in Figure 4.
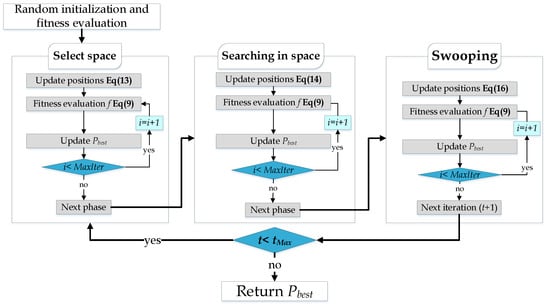
Figure 4.
BES flowchart.
The bald eagle search algorithm, similar to the other metaheuristic optimization algorithms, can be employed in online applications. At each iteration, the BES sends the candidate solutions to the system, and then the system reaction will send back to it through a zero-order hold block (ZOH). Based on the received feedback, the optimizer updates the positions and sends them again to the system to evaluate their effect on the system’s performance and determine the best one among them. This online optimization manner is similar to the one reported in [35].
4. Results and Discussion
To assess and validate the performance of each strategy, a simulation model was built in Matlab/Simulink environment. The elements, including the converters and the sources, are modeled using SimPowerSystem blocks. The performance of the studied EMS is evaluated for the Extra-Urban Driving Cycle (EUDC) and New European Driving Cycle (NEDC) speed profiles [45]. Table 2 presents the characteristics of each driving cycle. The speed and motor power profiles for both NEDC and EUDC are shown in Figure 5 and Figure 6, respectively. The proposed EMS was tested in a similar system used in [30]. The simulation is performed under several assumptions including the typical conditions t = 25 °C on a flat road without including the wind effect. In addition, the machine side is not included in the traction system to simplify the global model and accelerate the simulation.
Table 2.
Driving cycle characteristics.
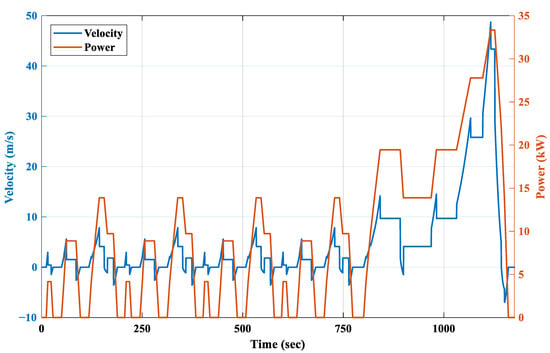
Figure 5.
NEDC driving cycle velocity and power profiles.
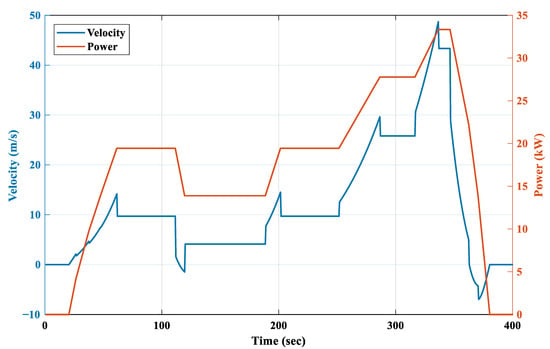
Figure 6.
EUDC driving cycle velocity and power profiles.
Average models have been used to represent the converters. Thus, efficacy is supposed to be constant. On the other hand, the vehicle parameters are presented in Table 3.
Table 3.
Vehicle parameters.
The proposed EMS is compared with the state machine control strategy (SMCS), equivalent consumption minimization strategy (ECMS), and classic PI control strategy. The PI regulator generates the battery power reference, which is then subtracted from the load power to obtain the fuel cell reference power. The PI gains the same with [30]. These parameters are included in More Electric Aircraft in the Matlab/Simulink library.
Furthermore, the proposed EEMS-based BES will be compared with EEMS minimized by the fmin function, PSO-based EEMS, and EO-based EEMS to validate its performance. The population size for each algorithm is set at five, and the max number of iterations is 100.
Figure 5 presents the velocity and the corresponding traction load power for the NEDC case. As illustrated in this figure, the speed significantly increases after the 800th second to the end of the profile. The power changes according to the velocity changes. Figure 6 presents the evolution of the speed and power for the EUDC driving cycle. The variation of the speed, in this case, is reduced compared to the case of the NEDC.
4.1. NEDC Case
The power sources, including the load, are displayed in Figure 7, employing the EEMS. The fuel flow rate and consumption for SMCS, PI, ECMS, and EEMS are represented in Figure 8. The SC power, which expresses the bus power, decreases if the load power decreases to absorb the excess power generated by the slow dynamic system (mainly the FC). In the load-increasing case, the SC provides the required power for a limited transition time until the battery and the FC reach their power references.
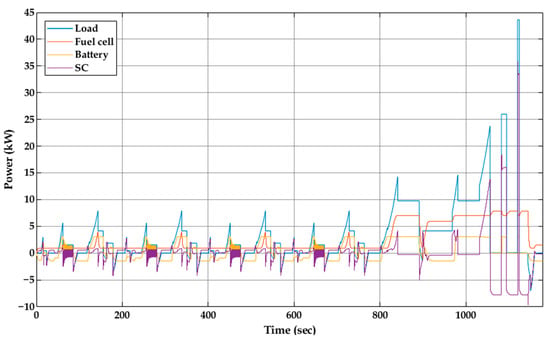
Figure 7.
Load, FC, battery, and SC power using EEMS for NEDC.
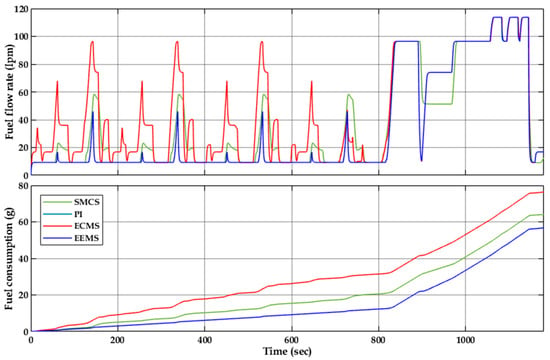
Figure 8.
Fuel flow rate and fuel consumption for SMCS, PI, ECMS, and EEMS for NEDC.
As illustrated in Figure 7, the FC supplies most of the load slowly due to its limited dynamics, which are related to its chemical reactions. The battery balances the power in the DC bus. It absorbs the excess power and supports FC in case of a deficit. The SC provides DC bus voltage smoothing by supplying the transit periods. Its mean power is zero in the steady state case.
Compared with the other strategies, the EEMS can successfully reduce fuel consumption, as illustrated in Figure 8. The fuel consumption evolution is slower compared to the other strategies. This advantage can be explained by its objective function, which maximizes the energy from the auxiliary sources, such as the battery, to contribute to minimizing fuel consumption.
Focusing on the EEMS, the EEMS-based fmin, PSO, EO, and BES results are illustrated in Figure 9. The top figure illustrates the fuel flow rate (FFR), and the bottom one shows the cumulative fuel consumption. The FFR achieves its max level during peak times because of the high demand for power from the traction system. As mentioned before, the FC supplied most of this load. Therefore the consumed fuel curve rises quickly during these times. EEMS-based PSO and EO do not perform better than the conventional EEMS, whereas the EEMS-based BES effectively reduces the FFR and the cumulative fuel consumption as illustrated at the end of these curves (from t = 850 to t = tend). Simulation statistics are presented in Table 4 to analyze the achieved results better. This table includes the consumed fuel, the electrical efficiency, and the battery’s final state of charge. The best results are marked in bold. The electrical efficiency expresses the losses efficiency in the power system. It can be calculated as a ratio between the traction system power and the total provided power as follows
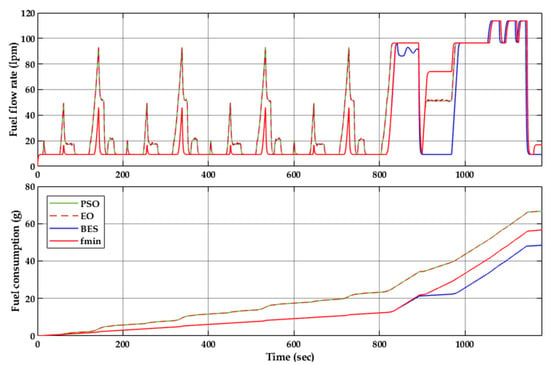
Figure 9.
Fuel flow rate and fuel consumption for EEMS-based fmin, PSO, EO, and BES for NEDC.
Table 4.
Simulation results.
The proposed EMS (EEMS-BES) successfully reduced the fuel consumption to 48.41 g compared to the conventional EEMS (65.71 g) and the other considered strategies. At the same time, it provided a higher electrical efficiency performance of 79.84%. The SMC strategy provides the second-best result concerning fuel consumption with 64.05 g, whereas the conventional EEMS provides the second-best efficiency with 74.80%. This confirmed its ability to reduce consumed hydrogen and enhance efficiency.
4.2. EUDC Case
The power sources, including the load, are displayed in Figure 10, employing the EEMS. The fuel flow rate and consumption for SMCS, PI, ECMS, and EEMS are represented in Figure 11. EEMS-based fmin, PSO, EO, and BES are illustrated in Figure 12.
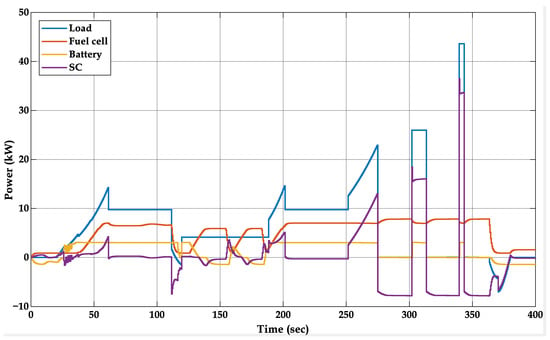
Figure 10.
Load, FC, battery, and SC power using EEMS for EUDC.
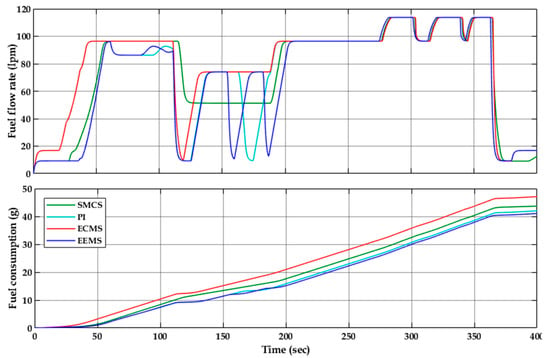
Figure 11.
Fuel flow rate and fuel consumption for SMCS, PI, ECMS, and EEMS for EUDC.
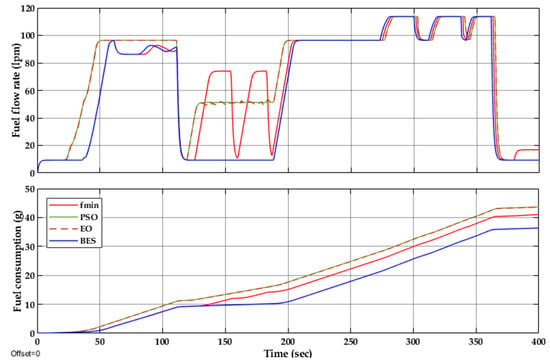
Figure 12.
Fuel flow rate and fuel consumption for EEMS-based fmin, PSO, EO, and BES for EUDC.
The load fluctuations are lower compared with the NEDC case. FC, battery, and SC dynamics are more explicit in this figure, where the FC supplies the most load, the battery balances the power in the DC bus, and the SC provides the transit periods. The simulation results are presented in Figure 11 and Figure 12, and their corresponding statistics are presented in Table 5. At the first 20 s, the load is minimal, the FC operates at its lower rate, and the battery starts charging. After 30 s, the constant switching between the battery and the supercapacitor is related to the optimizer output signals. The optimizer starts from random positions and sends them to the power system as candidate solutions. The optimizer converges to the optimal solutions based on the recorded feedback from the system. At t = 280 s, the load is down. However, the required power by the bus, expressed by the SC power, is still high due to the SC discharging. At this moment, the FC charges the SC. At t = 303 s, the load suddenly rises, which will be supplied quickly by the SC and the battery. This large amount provided by the SC and the battery reduces the demand on the FC for a short time. At t = 365 s, the load power becomes negative due to the breaking power. This extra power will charge the battery.
Table 5.
Simulation results.
Figure 11 and Figure 12 show the variations in the fuel flow rate (FFR) and the evolution of the consumed hydrogen as a function of time. Similar to the results obtained in the NEDC case, the proposed EEMMS minimized fuel consumption compared to the other common strategies. The EEMS-BES also provides better results compared with the other EEMS versions. In Table 5, the best results are marked in bold. The proposed method results are the best in terms of fuel consumption and electrical efficiency.
The proposed EMS (EEMS-BES) proves its best performance compared to the other strategies regarding fuel consumption and electrical efficiency. The total consumed fuel was reduced to 36.39 g during the driving cycle, and efficiency equals 70.41%. The conventional EEMS follows it in terms of fuel consumption (41.05 g), and the EEMS-EO provides the second-best results regarding electrical efficiency. This second test approves the ability and robustness of the proposed strategy to meet predefined objectives, fuel reduction, and efficiency enhancement.
To ultimately approve the performance of the proposed EMS, Table 6 provides comparison results between the proposed EEMS-BES and the other common strategies. For the fuel-saving column, each value represents the fuel-saving ratio compared to each strategy (PI, SMC, ECMS, and conventional EEMS). In contrast, the efficiency enhancement represents the gain ratio compared to each strategy.
Table 6.
Statistical results of the optimized EEMS-BES compared to other strategies.
Compared to the method reported in [30], the proposed EMS successfully reduced the consumed fuel and enhanced the electrical efficiency. The performance of the proposed EMS has been approved from these results in both fuel saving compared to the classical EEMS (26.33% for the NEDC case and 11.35% for EUDC) and efficiency enhancement (6.74% for the NEDC case, 36.19% for EUDC).
5. Conclusions and Future Works
This paper presents an optimal energy management strategy (EMS) for fuel cell hybrid electrical vehicles (FCEVs) that was designed to ensure optimum power distribution between the sources, considering fuel consumption minimization and enhancing electrical efficiency. The proposed EMS is an optimized version of the external energy maximization strategy (EEMS) employing the bald eagle search (BES) algorithm. To approve the performance of the proposed EMS, a comparative simulation was performed for Extra-Urban Driving Cycle (EUDC) and the New European Driving Cycle (NEDC) profiles. Furthermore, this strategy was compared with the state machine control strategy (SMCS), classic PI, equivalent consumption minimization strategy (ECMS) EEMS based on fmin function, particle swarm optimization (PSO)-based EEMS, and equilibrium optimizer (EO)-based EEMS. Finally, fuel consumption and electrical system efficiency were compared. The obtained results approve the ability of the proposed strategy to reduce fuel consumption by 26.33% for NEDC and 11.35% for EUDC and enhance system efficiency by 6.74% for NEDC and 36.19% for EUDC. The increased complexity of the BES may require a fast-resolving calculator, which may increase the installation cost of this strategy in real-world applications. However, the cost of these calculators may decrease with technological advancement. Moreover, the results provided by the PSO and the PO are worse than the conventional EEMS. This can be explained by the no-free lunch theory (NFL), where no optimization algorithm can provide good performance for all optimization problems.
This study intends to reduce fuel consumption and increase the power system’s global efficiency. Considering the battery SoC is a challenging task, this will be investigated as a multi-optimization problem in our future works. In addition, analyzing the power losses can be a critical factor in optimizing performance. This will be investigated in our future works.
Author Contributions
Conceptualization, S.F. and H.R.; methodology, S.F. and H.R.; software, S.F. and H.R.; validation, R.M.G., A.F. and R.A.; formal analysis, S.F.; investigation, S.F. and H.R.; re-sources, H.R.; data curation, H.R. and H.R.; writing—original draft preparation, S.F.; writing—review and editing, H.R. and M.M.G.; visualization, S.F.; supervision, H.R.; project administration, R.M.G.; funding acquisition, R.M.G. All authors have read and agreed to the published version of the manuscript.
Funding
This work was funded by the Deanship of Scientific Research at Princess Nourah bint Abdulrahman University through the Research Groups Program Grant no. (RGP-1443-0046).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
Nomenclature
| FCEV | fuel cell hybrid electric vehicle |
| FC | fuel cell |
| PEMFC | proton exchange membrane FC |
| CH2 | consumed hydrogen |
| FFR | fuel flow rate |
| SC | supercapacitor |
| EES | energy storage system |
| SoC | state of charge |
| EMS | energy management strategy |
| EEMS | external energy maximization strategy |
| ECMS | equivalent consumption minimization strategy |
| SMCS | state machine control strategy |
| BES | bald eagle search algorithm |
| PSO | particle swarm optimization |
| EO | equilibrium optimizer |
| EUDC | Extra-Urban Driving Cycle |
| NEDC | New European Driving Cycle |
References
- Center for Sustainable Systems. U.S. Energy System Factsheet. 2020, Volume 14. Available online: https://css.umich.edu/publications/factsheets/energy/us-energy-system-factsheet (accessed on 12 December 2022).
- Payakkamas, P.; de Kraker, J.; Dijk, M. Transformation of the Urban Energy–Mobility Nexus: Implications for Sustainability and Equity. Sustainability 2023, 15, 1328. [Google Scholar] [CrossRef]
- Veziroglu, A.; Macario, R. Fuel cell vehicles: State of the art with economic and environmental concerns. Int. J. Hydrogen Energy 2011, 36, 25–43. [Google Scholar] [CrossRef]
- Arat, H.T. Alternative fuelled hybrid electric vehicle (AF-HEV) with hydrogen enriched internal combustion engine. Int. J. Hydrogen Energy 2019, 44, 19005–19016. [Google Scholar] [CrossRef]
- Changizian, S.; Ahmadi, P.; Raeesi, M.; Javani, N. Performance optimization of hybrid hydrogen fuel cell-electric vehicles in real driving cycles. Int. J. Hydrogen Energy 2020, 45, 35180–35197. [Google Scholar] [CrossRef]
- USDOE Office of Energy Efficiency and Renewable Energy (EERE). Multi-Year Research, Development, and Deployment Plan (MYRDD Plan): Fuel Cells; EERE Publication and Product Library: Washington, DC, USA, 2016.
- Nazari-Heris, M.; Abapour, M.; Mohammadi-Ivatloo, B. An Updated Review and Outlook on Electric Vehicle Aggregators in Electric Energy Networks. Sustainability 2022, 14, 5747. [Google Scholar] [CrossRef]
- Wang, Z.; Luo, W.; Xu, S.; Yan, Y.; Huang, L.; Wang, J.; Hao, W.; Yang, Z. Electric Vehicle Lithium-Ion Battery Fault Diagnosis Based on Multi-Method Fusion of Big Data. Sustainability 2023, 15, 1120. [Google Scholar] [CrossRef]
- Li, T.; Liu, H.; Zhao, D.; Wang, L. Design and analysis of a fuel cell supercapacitor hybrid construction vehicle. Int. J. Hydrogen Energy 2016, 41, 12307–12319. [Google Scholar] [CrossRef]
- Li, C.-Y.; Liu, G.-P. Optimal fuzzy power control and management of fuel cell/battery hybrid vehicles. J. Power Sources 2009, 192, 525–533. [Google Scholar] [CrossRef]
- Zhang, Z.; Guan, C.; Liu, Z. Real-Time Optimization Energy Management Strategy for Fuel Cell Hybrid Ships Considering Power Sources Degradation. IEEE Access 2020, 8, 87046–87059. [Google Scholar] [CrossRef]
- Nasri, S.; Sami, B.S.; Cherif, A. Power management strategy for hybrid autonomous power system using hydrogen storage. Int. J. Hydrogen Energy 2016, 41, 857–865. [Google Scholar] [CrossRef]
- Sulaiman, N.; Hannan, M.A.; Mohamed, A.; Majlan, E.H.; Wan Daud, W.R. A review on energy management system for fuel cell hybrid electric vehicle: Issues and challenges. Renew. Sustain. Energy Rev. 2015, 52, 802–814. [Google Scholar] [CrossRef]
- Xue, Q.; Zhang, X.; Teng, T.; Zhang, J.; Feng, Z.; Lv, Q. A Comprehensive Review on Classification, Energy Management Strategy, and Control Algorithm for Hybrid Electric Vehicles. Energies 2020, 13, 5355. [Google Scholar] [CrossRef]
- Peng, H.; Li, J.; Löwenstein, L.; Hameyer, K. A scalable, causal, adaptive energy management strategy based on optimal control theory for a fuel cell hybrid railway vehicle. Appl. Energy 2020, 267, 114987. [Google Scholar] [CrossRef]
- Roozegar, M.; Angeles, J. The optimal gear-shifting for a multi-speed transmission system for electric vehicles. Mech. Mach. Theory 2017, 116, 1–13. [Google Scholar] [CrossRef]
- Zhang, X.; Ren, X.; Zheng, C.; Yuan, Y.; Diao, L. Dynamic Programming in Energy Management Strategy for Optimizing Multi-energy Drive System. In Lecture Notes in Electrical Engineering; Springer: Berlin/Heidelberg, Germany, 2020; Volume 638, pp. 471–480. ISBN 9789811528613. [Google Scholar]
- Leroy, T.; Vidal-Naquet, F.; Tona, P. Stochastic Dynamic Programming based Energy Management of HEV’s: An Experimental Validation. IFAC Proc. Vol. 2014, 47, 4813–4818. [Google Scholar] [CrossRef]
- Lei, Z.; Qin, D.; Hou, L.; Peng, J.; Liu, Y.; Chen, Z. An adaptive equivalent consumption minimization strategy for plug-in hybrid electric vehicles based on traffic information. Energy 2020, 190, 116409. [Google Scholar] [CrossRef]
- Dhifli, M.; Jawadi, S.; Lashab, A.; Guerrero, J.M.; Cherif, A. An Efficient External Energy Maximization-based Energy Management Strategy for a Battery/Supercapacitor of a Micro Grid System. Int. J. Comput. Sci. Netw. Secur. 2020, 20, 196–203. [Google Scholar]
- Serrao, L.; Onori, S.; Rizzoni, G. ECMS as a realization of Pontryagin’s minimum principle for HEV control. In Proceedings of the 2009 American Control Conference, St. Louis, MI, USA, 10–12 June 2009; IEEE: Piscataway, NJ, USA; pp. 3964–3969. [Google Scholar]
- Zheng, C.H.; Xu, G.Q.; Cha, S.W.; Liang, Q. Numerical comparison of ECMS and PMP-based optimal control strategy in hybrid vehicles. Int. J. Automot. Technol. 2014, 15, 1189–1196. [Google Scholar] [CrossRef]
- Pukkunnen, E.B.; Joseph, N.M.; Jos, B.M.; Joy, M.C.; Eldhose, K.A. Performance investigation and energy optimisation in hybrid electric vehicle model using reinforcement learning and fuzzy controller. Int. J. Veh. Perform. 2023, 9, 73. [Google Scholar] [CrossRef]
- Liu, Y.; Wu, Y.; Wang, X.; Li, L.; Zhang, Y.; Chen, Z. Energy management for hybrid electric vehicles based on imitation reinforcement learning. Energy 2023, 263, 125890. [Google Scholar] [CrossRef]
- Tormos, B.; Pla, B.; Bares, P.; Pinto, D. Energy Management of Hybrid Electric Urban Bus by Off-Line Dynamic Programming Optimization and One-Step Look-Ahead Rollout. Appl. Sci. 2022, 12, 4474. [Google Scholar] [CrossRef]
- Min, D.; Song, Z.; Chen, H.; Wang, T.; Zhang, T. Genetic algorithm optimized neural network based fuel cell hybrid electric vehicle energy management strategy under start-stop condition. Appl. Energy 2022, 306, 118036. [Google Scholar] [CrossRef]
- Ouddah, N.; Boukhnifer, M.; Raisemche, A. Two control energy management schemes for electrical hybrid vehicle. In Proceedings of the 10th International Multi-Conferences on Systems, Signals & Devices 2013 (SSD13), Hammamet, Tunisia, 18–21 March 2013; IEEE: Piscataway, NJ, USA; pp. 1–6. [Google Scholar]
- García, P.; Torreglosa, J.P.; Fernández, L.M.; Jurado, F. Control strategies for high-power electric vehicles powered by hydrogen fuel cell, battery and supercapacitor. Expert Syst. Appl. 2013, 40, 4791–4804. [Google Scholar] [CrossRef]
- Zandi, M.; Payman, A.; Martin, J.-P.; Pierfederici, S.; Davat, B.; Meibody-Tabar, F. Energy Management of a Fuel Cell/Supercapacitor/Battery Power Source for Electric Vehicular Applications. IEEE Trans. Veh. Technol. 2011, 60, 433–443. [Google Scholar] [CrossRef]
- Motapon, S.N.; Dessaint, L.-A.; Al-Haddad, K. A Comparative Study of Energy Management Schemes for a Fuel-Cell Hybrid Emergency Power System of More-Electric Aircraft. IEEE Trans. Ind. Electron. 2014, 61, 1320–1334. [Google Scholar] [CrossRef]
- Uzunoglu, M.; Alam, M.S. Modeling and Analysis of an FC/UC Hybrid Vehicular Power System Using a Novel-Wavelet-Based Load Sharing Algorithm. IEEE Trans. Energy Convers. 2008, 23, 263–272. [Google Scholar] [CrossRef]
- Ates, Y.; Uzunoglu, M.; Erdinc, O.; Vural, B. A wavelet-ADALINE network based load sharing and control algorithm for a FC/UC hybrid vehicular power system. In Proceedings of the 2009 International Conference on Clean Electrical Power, Capri, Italy, 9–11 June 2009; IEEE: Piscataway, NJ, USA; pp. 591–594. [Google Scholar]
- Iqbal, M.; Becherif, M.; Ramadan, H.S.; Badji, A. Dual-layer approach for systematic sizing and online energy management of fuel cell hybrid vehicles. Appl. Energy 2021, 300, 117345. [Google Scholar] [CrossRef]
- Antarasee, P.; Premrudeepreechacharn, S.; Siritaratiwat, A.; Khunkitti, S. Optimal Design of Electric Vehicle Fast-Charging Station’s Structure Using Metaheuristic Algorithms. Sustainability 2022, 15, 771. [Google Scholar] [CrossRef]
- Rezk, H.; Nassef, A.M.; Abdelkareem, M.A.; Alami, A.H.; Fathy, A. Comparison among various energy management strategies for reducing hydrogen consumption in a hybrid fuel cell/supercapacitor/battery system. Int. J. Hydrogen Energy 2019, 46, 6110–6126. [Google Scholar] [CrossRef]
- Zhao, J.; Ramadan, H.S.; Becherif, M. Metaheuristic-based energy management strategies for fuel cell emergency power unit in electrical aircraft. Int. J. Hydrogen Energy 2019, 44, 2390–2406. [Google Scholar] [CrossRef]
- Ahmadi, S.; Bathaee, S.M.T.; Hosseinpour, A.H. Improving fuel economy and performance of a fuel-cell hybrid electric vehicle (fuel-cell, battery, and ultra-capacitor) using optimized energy management strategy. Energy Convers. Manag. 2018, 160, 74–84. [Google Scholar] [CrossRef]
- Lü, X.; Wu, Y.; Lian, J.; Zhang, Y.; Chen, C.; Wang, P.; Meng, L. Energy management of hybrid electric vehicles: A review of energy optimization of fuel cell hybrid power system based on genetic algorithm. Energy Convers. Manag. 2020, 205, 112474. [Google Scholar] [CrossRef]
- Iqbal, M.; Laurent, J.; Benmouna, A.; Becherif, M.; Ramadan, H.S.; Claude, F. Ageing-aware load following control for composite-cost optimal energy management of fuel cell hybrid electric vehicle. Energy 2022, 254, 124233. [Google Scholar] [CrossRef]
- Fathy, A.; Ferahtia, S.; Rezk, H.; Yousri, D.; Abdelkareem, M.A.; Olabi, A.G. Robust parameter estimation approach of Lithium-ion batteries employing bald eagle search algorithm. Int. J. Energy Res. 2022, 46, 10564–10575. [Google Scholar] [CrossRef]
- Ferahtia, S.; Rezk, H.; Djerioui, A.; Houari, A.; Motahhir, S.; Zeghlache, S. Modified bald eagle search algorithm for lithium-ion battery model parameters extraction. ISA Trans. 2022. [Google Scholar] [CrossRef]
- Ferahtia, S.; Rezk, H.; Abdelkareem, M.A.; Olabi, A.G. Optimal techno-economic energy management strategy for building’s microgrids based bald eagle search optimization algorithm. Appl. Energy 2022, 306, 118069. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the ICNN’95—International Conference on Neural Networks, Perth, Australia, 12 June 1995; IEEE: Piscataway, NJ, USA; Volume 4, pp. 1942–1948. [Google Scholar]
- Faramarzi, A.; Heidarinejad, M.; Stephens, B.; Mirjalili, S. Equilibrium optimizer: A novel optimization algorithm. Knowl.-Based Syst. 2020, 191, 105190. [Google Scholar] [CrossRef]
- Zhang, X.; Mi, C. Vehicle Power Management; Power Systems; Springer London: London, UK, 2011; ISBN 978-0-85729-735-8. [Google Scholar]
- Tabbache, B.; Djebarri, S.; Kheloui, A.; Benbouzid, M. A power presizing methodology for electric vehicle traction motors. Int. Rev. Model. Simul. 2013, 6, 195–202. [Google Scholar]
- Li, H.; Ravey, A.; N’Diaye, A.; Djerdir, A. Online adaptive equivalent consumption minimization strategy for fuel cell hybrid electric vehicle considering power sources degradation. Energy Convers. Manag. 2019, 192, 133–149. [Google Scholar] [CrossRef]
- Ferahtia, S.; Djeroui, A.; Rezk, H.; Chouder, A.; Houari, A.; Machmoum, M. Optimal parameter identification strategy applied to lithium-ion battery model. Int. J. Energy Res. 2021, 45, 16741–16753. [Google Scholar] [CrossRef]
- Alsattar, H.A.; Zaidan, A.A.; Zaidan, B.B. Novel meta-heuristic bald eagle search optimisation algorithm. Artif. Intell. Rev. 2020, 53, 2237–2264. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).