
Research on a Speed Guidance Strategy for Mine Vehicles in Three-Fork Roadways Based on Vehicle–Road Coordination

Abstract
:1. Introduction
- We established a vehicle dynamics model of a coal mine underground mining vehicle and assessed the speed induction control process according to the different states of the signal lamp.
- We introduced the speed guidance strategy into the operation process of underground mining vehicles in coal mines. In order to prevent large speed fluctuations, an S-type acceleration and deceleration algorithm is introduced. This algorithm can smooth the speed of the target vehicle and reduce safety accidents due to large fluctuations.
- Through the joint simulation of PTV VISSIM traffic simulation software and PYTHON, we selected the three indexes of travel time, vehicle delay time, and number of queuing vehicles in the three-fork roadway as the evaluation indexes of this experiment. According to whether the mining vehicle uses the speed induction strategy, the experiment is carried out to analyze the operation of the mining vehicle in the three-fork roadway of the coal mine.
2. Materials and Methods
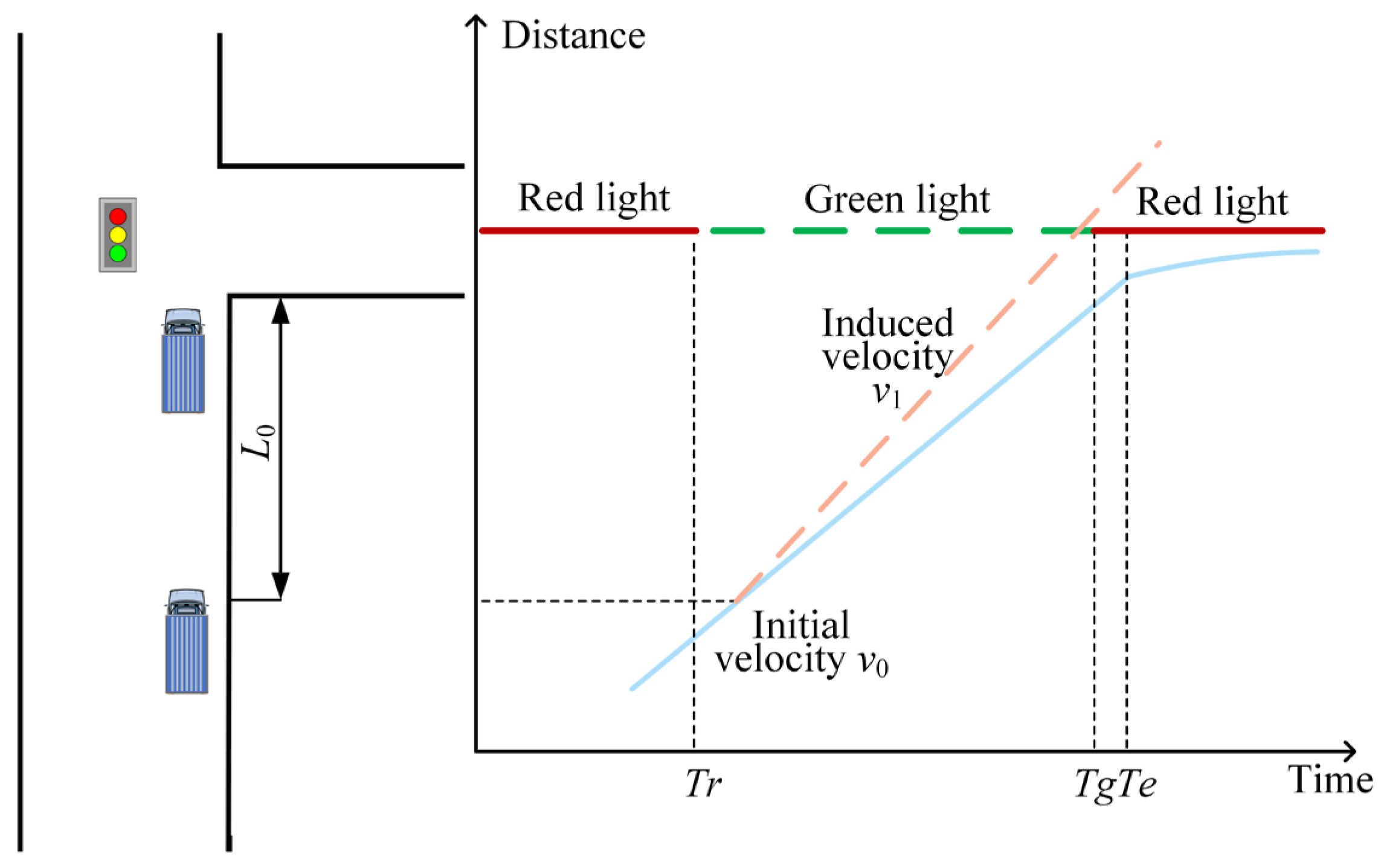
2.1. Problem Description
2.2. Mining Vehicle Speed Guidance Strategy at the Intersection of Three Forks in the Underground Roadway of a Coal Mine
Vehicle Dynamics Model and Assumptions
- Definition of the vehicle dynamics model
- Model basic assumptions
- The communication delay between vehicle equipment and roadside equipment is negligible;
- The specific size of the vehicle is not considered;
- Only straight and turning vehicle movements are considered; vehicle uphill and downhill movements are not considered;
- The study area is identified as a single intersection without considering the influence of other intersections;
- The vehicle must obey safe following distance while driving;
- Vehicles equipped with onboard equipment drive in strict accordance with the received speed guidance information.
2.3. Vehicle Speed Guidance Strategy
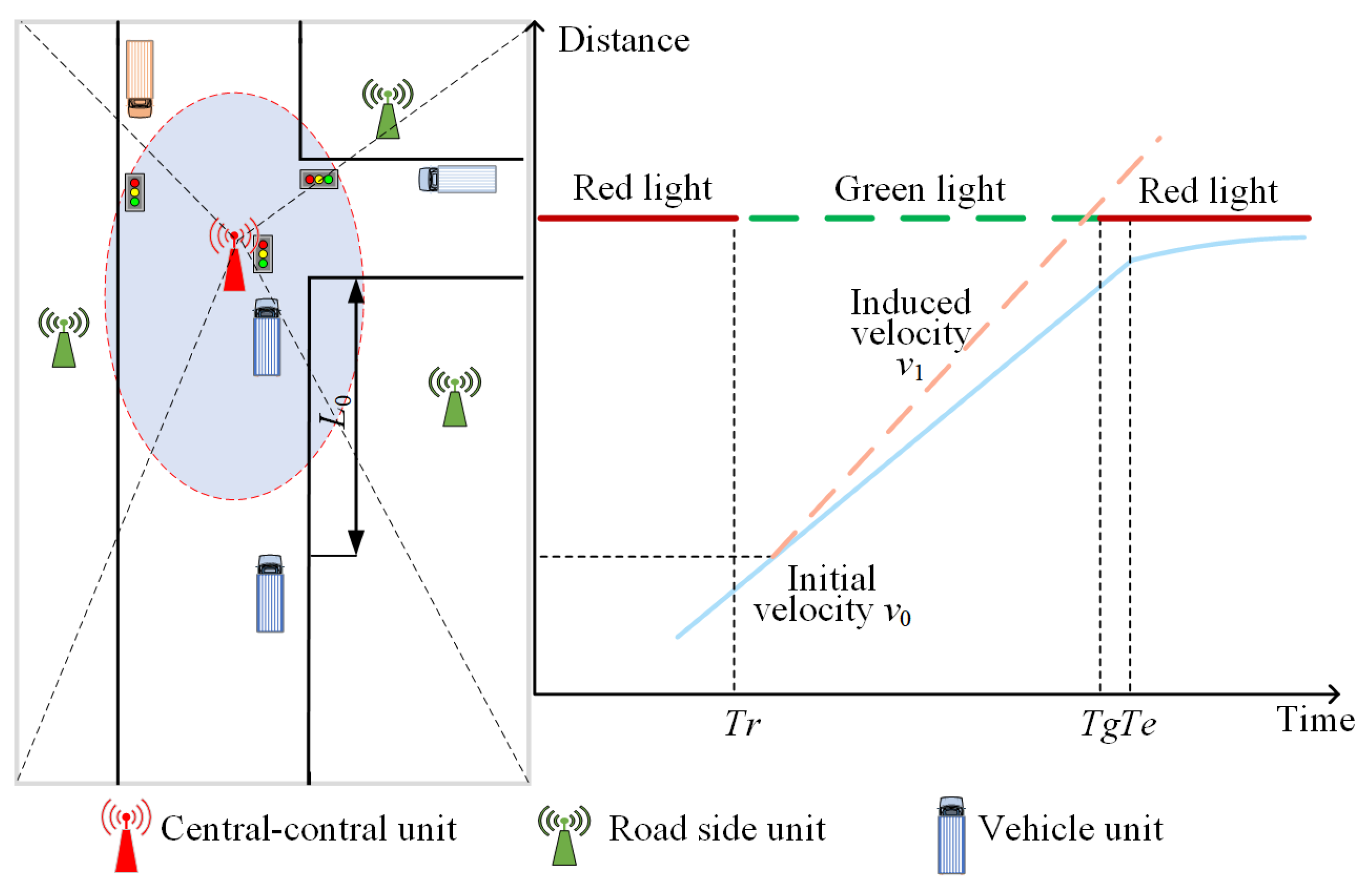
2.3.1. The Definition of the Speed-Induced Area of the Three-Fork Roadway in the Coal Mine
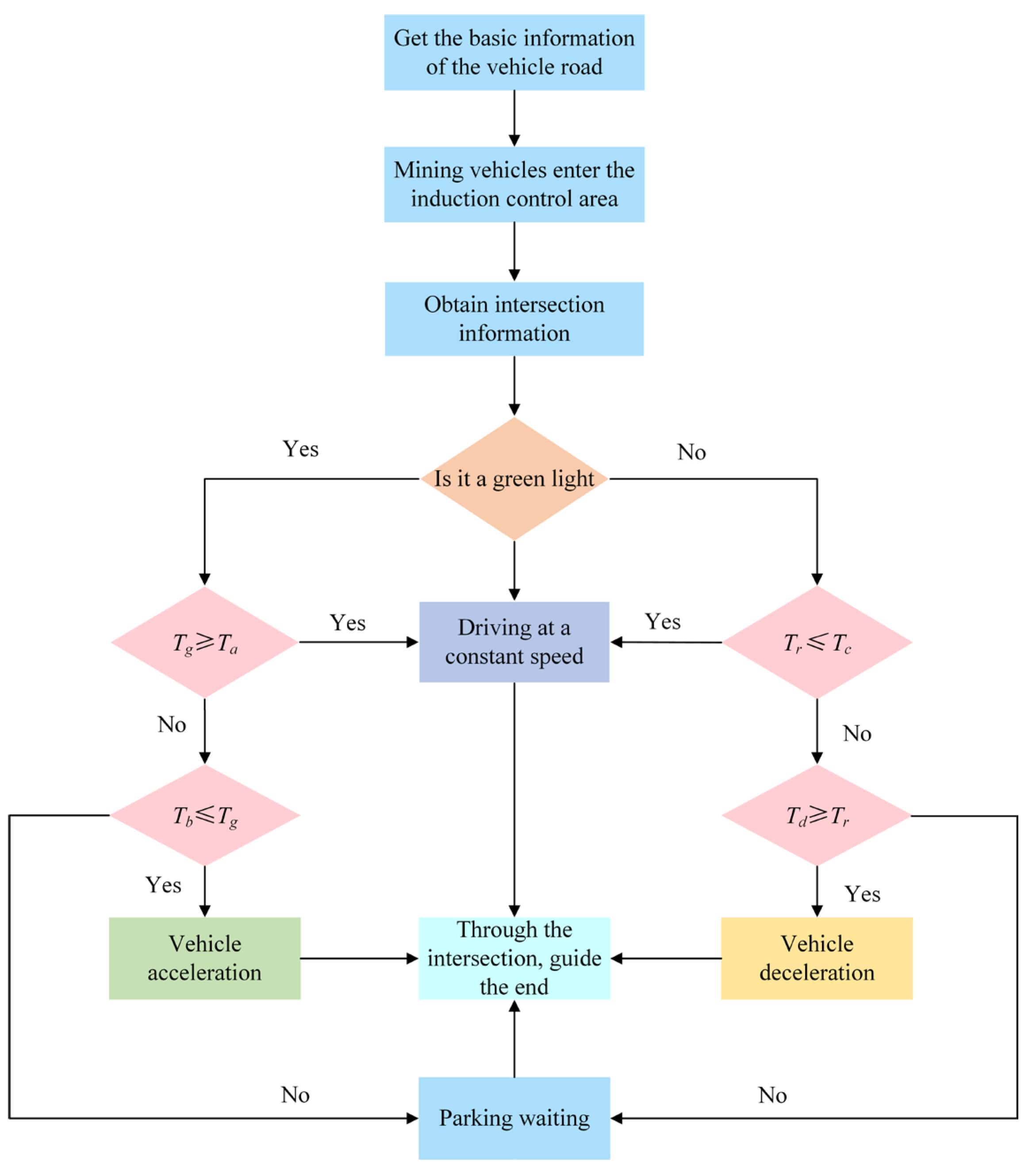
2.3.2. Speed Guidance Strategy of the Three-Fork Roadway in the Coal Mine
- If the three-fork roadway ahead is a green light:
- In order to consider the safety of driving, the target vehicle accelerates at the maximum acceleration . When it reaches , it can then pass through the signalized intersection before the current green light period with the speed limit of the road section, that is,
- 2.
- In order to consider traffic safety, the target vehicle is accelerated with the maximum acceleration , and when it reaches , then the road speed limit is still unable to pass the signal intersection during the current green light period, that is,
- If the three-fork roadway ahead is a red light:
- In order to consider traffic safety, the target vehicle is decelerated at the maximum deceleration , reaching , and then the speed limit can be passed through the signal intersection after the current red light, that is,
- 2.
- In order to consider driving safety, the target vehicle decelerates at the maximum deceleration , and when it reaches it then drives at the speed limit of the road section to the stop line of the entrance road, and the green light does not start, that is,
2.4. Speed Optimization of S-Type Acceleration and Deceleration Algorithm
3. Experimental Analysis
3.1. Construction of Road Network Model
3.2. Experimental Design
- The expected speed set by the vehicle is basically consistent;
- Three-fork roadway signal lamp timing control;
- Only two types of coal mine underground transport vehicles and cargo vehicles are considered.
3.3. Analysis of Simulation Results
3.3.1. Analysis of Travel Time
3.3.2. Analysis of the Number of Queuing Vehicles
3.3.3. Analysis of Delay Time
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Yang, X.; Zhao, Q.; Ma, W.; Bai, Y. A Review of Research on the Calculation Method of Traffic Capacity of Signal-Controlled Intersections. J. China Highw. 2014, 27, 148–157. [Google Scholar]
- Wang, X.; Liu, M.; Ci, Y.; Yang, Y.; Cui, Z. Effectiveness of driver’s bounded rationality and speed guidance on fuel-saving and emissions-reducing at a signalized intersection. J. Clean. Prod. 2021, 325, 129343. [Google Scholar] [CrossRef]
- Sharma, N.; Kumar, P.P.; Dhyani, R.; Ravisekhar, C.; Ravinder, K. Idling fuel consumption and emissions of air pollutants at selected signalized intersections in Delhi. J. Clean. Prod. 2019, 212, 8–21. [Google Scholar] [CrossRef]
- Marwan, S.M.A.; Ali, A.; Scott, T. The impact of road intersection topology on traffic congestion in urban cities. In Intelligent Systems and Applications: Proceedings of the 2018 Intelligent Systems Conference (IntelliSys); Springer International Publishing: Cham, Switzerland, 2019; Volume 1, pp. 1196–1207. [Google Scholar]
- Wang, H.; Luo, S.; Luo, T. Fractal characteristics of urban surface transit and road networks: Case study of Strasbourg, France. Adv. Mech. Eng. 2017, 9, 1687814017692289. [Google Scholar] [CrossRef]
- Stevanovic, A.; Mitrovic, N. Traffic microsimulation for flexible utilization of urban roadways. Transp. Res. Rec. 2019, 2673, 92–104. [Google Scholar] [CrossRef]
- Yang, Z.; Zeng, H.; Yu, Z.; Wei, X.; Liu, A.; Fan, X. Research on eco-driving strategy at intersection based on vehicle infrastructure cooperative system. Adv. Mech. Eng. 2019, 11, 1687814019843368. [Google Scholar] [CrossRef]
- Xia, H.; Wu, G.; Boriboonsomsin, K.; Barth, M.J. Development and evaluation of an enhanced eco-approach traffic signal application for connected vehicles. In Proceedings of the 2013 16th International IEEE Conference on Intelligent Transportation Systems (ITSC 2013), The Hague, The Netherlands, 6–9 October 2013; pp. 296–301. [Google Scholar]
- Yang, H.; Rakha, H.; Ala, M.V. Eco-cooperative adaptive cruise control at signalized intersections considering queue effects. IEEE Trans. Intell. Transp. Syst. 2016, 18, 1575–1585. [Google Scholar] [CrossRef]
- Sun, X.; Lin, K.; Jiao, P.; Lu, H. The dynamical decision model of intersection congestion based on risk identification. Sustainability 2020, 12, 5923. [Google Scholar] [CrossRef]
- Astarita, V.; Caliendo, C.; Giofrè, V.P.; Russo, I. Surrogate safety measures from traffic simulation: Validation of safety indicators with intersection traffic crash data. Sustainability 2020, 12, 6974. [Google Scholar] [CrossRef]
- Chen, J.; Wang, W.; Li, Z.; Jiang, H.; Chen, X.; Zhu, S. Dispersion effect in left-Turning bicycle traffic and its influence on capacity of left-turning vehicles at signalized intersections. Transp. Res. Rec. 2014, 2468, 38–46. [Google Scholar] [CrossRef]
- Zhang, H.Z.; Jiang, R.; Hu, M.B.; Jia, B. Analytical investigation on the minimum traffic delay at a three-phase signalized T-type intersection. Mod. Phys. Lett. B 2017, 31, 1750063. [Google Scholar] [CrossRef]
- Su, D.; Cong, W.; Jiang, K. Research on Ecological Driving Strategy of Urban Road Vehicles under Vehicle-road Collaborative Environment. In IOP Conference Series: Materials Science and Engineering; IOP Publishing: Bristol, UK, 2020; Volume 793. [Google Scholar]
- Ma, Z.; Sun, S. Research on vehicle-to-road collaboration and end-to-end collaboration for multimedia services in the Internet of Vehicles. IEEE Access 2021, 10, 18146–18155. [Google Scholar] [CrossRef]
- Xu, Z.; Zhao, S.; Zhang, R. An efficient multi-sensor fusion and tracking protocol in a vehicle-road collaborative system. IET Commun. 2021, 15, 2330–2341. [Google Scholar] [CrossRef]
- Lu, Y.R.; Xu, X.; Ding, C.; Lu, G. A Speed Control Strategy at Signalized Intersection under Connected Vehicle Environment. J. Transp. Syst. Eng. Inf. Technol. 2018, 18, 50. [Google Scholar]
- Deng, Y.J.; Liu, X.H.; Hu, X.; Zhang, M. Reduce bus bunching with a real-time speed control algorithm considering heterogeneous roadway conditions and intersection delays. J. Transp. Eng. 2020, 146, 04020048. [Google Scholar] [CrossRef]
- Varga, B.; Tettamanti, T.; Kulcsár, B.; Qu, X. Public transport trajectory planning with probabilistic guarantees. Transp. Res. Part B Methodol. 2020, 139, 81–101. [Google Scholar] [CrossRef]
- Liu, S.; Zhang, W.; Wu, X.; Feng, S.; Pei, X.; Yao, D. A simulation system and speed guidance algorithms for intersection traffic control using connected vehicle technology. Tsinghua Sci. Technol. 2018, 24, 160–170. [Google Scholar] [CrossRef]
- Gong, S.; Du, L. Cooperative platoon control for a mixed traffic flow including human drive vehicles and connected and autonomous vehicles. Transp. Res. Part B Methodol. 2018, 116, 25–61. [Google Scholar] [CrossRef]
- Tang, T.Q.; Yi, Z.Y.; Zhang, J.; Wang, T.; Leng, J.Q. A speed guidance strategy for multiple signalized intersections based on car-following model. Phys. A Stat. Mech. Appl. 2018, 496, 399–409. [Google Scholar] [CrossRef]
- Gao, Y.F.; Xi, J.W.; Sun, K. Joint Optimization of Speed Guidance and Signal Priority Control for Connected Autonomous Truck Platoon at Intersections with Car and Truck Separation. J. Transp. Syst. Eng. Inf. Technol. 2023, 23, 88–101. [Google Scholar]
- Shi, Q.; Qiu, T.Z. Research on Speed Guidance Strategy based on multi-objective optimization in Connected Vehicle Environment. In Proceedings of the 2023 7th International Conference on Transportation Information and Safety (ICTIS), IEEE, Xi’an, China, 4–6 August 2023; pp. 1–8. [Google Scholar]
- Yao, H.; Li, X. Decentralized control of connected automated vehicle trajectories in mixed traffic at an isolated signalized intersection. Transp. Res. Part C Emerg. Technol. 2020, 121, 102846. [Google Scholar] [CrossRef]
- Liu, X.; Wang, H.; Hong, J.; Hao, L. Speed Control Strategy and Optimization of Signalized Intersection in Network Environment. J. Transp. Syst. Eng. Inf. Technol. 2021, 21, 82–90. [Google Scholar]
- Li, S.; Qu, X.; Tuo, X.; Ran, B. Toward Cooperative Vehicle Infrastructure System: A Speed Guidance-Based Car-Following Method for Signalized Intersections. CICTP 2022, 2022, 810–820. [Google Scholar]
- Wang, J.; Gao, X.; Duan, H.; Liu, X.; Huang, H. Study of vehicle-road cooperative green wave traffic strategy for traffic signal intersections. In Proceedings of the 2022 International Conference on Electronics and Devices, Computational Science (ICEDCS), Marseille, France, 20–22 September 2022; pp. 187–192. [Google Scholar]
- Ma, Q.; Zhang, S.; Zhou, Q. Development of a conflict-free unsignalized intersection organization method for multiple connected and autonomous vehicles. PLoS ONE 2021, 16, e0249170. [Google Scholar] [CrossRef] [PubMed]
- Gao, Q.; Zhang, S.; Chen, G.; Du, Y. Two-way cooperative priority control of bus transit with stop capacity constraint. Sustainability 2020, 12, 1405. [Google Scholar] [CrossRef]
- Li, C.; Zheng, R.; Ma, X.; Ding, Z.; Zhang, S.; Zhong, J. A Rapid Traffic Method of the Intelligent Connected Bus Based on Immune Algorithm. In Proceedings of the 2022 IEEE 5th International Conference on Information Systems and Computer Aided Education (ICISCAE), Dalian, China, 23–25 September 2022; pp. 411–417. [Google Scholar]
- Liang, X.; Guler, S.I.; Gayah, V.V. Joint optimization of signal phasing and timing and vehicle speed guidance in a connected and autonomous vehicle environment. Transp. Res. Rec. 2019, 2673, 70–83. [Google Scholar] [CrossRef]
- Ren, C.; Wang, L.; Wang, J.; Qu, J. A Speed Guidance Strategy at Intersections Based on Multiple Regression Analysis in the Connected Vehicles Environment. In Proceedings of the 2022 IEEE 7th International Conference on Intelligent Transportation Engineering (ICITE), Beijing, China, 11–13 November 2022; pp. 360–364. [Google Scholar]
- Han, Y.; Yu, H.; Li, Z.; Xu, C.; Ji, Y.; Liu, P. An optimal control-based vehicle speed guidance strategy to improve traffic safety and efficiency against freeway jam waves. Accid. Anal. Prev. 2021, 163, 106429. [Google Scholar] [CrossRef] [PubMed]
- Wang, N.; Chen, Y. Research on vehicle speed guidance model based on green wave vehicle scene. SPIE 2023, 12591, 550–555. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Definition |
|---|---|
| System state, including the traffic condition and the controlled variables | |
| Traffic conditions, including the states of all vehicles in the current system | |
| Functional parameters | |
| Controlled variables, including the guided speed and the information of traffic light (0 represents red light, 1 represents green light) | |
| Vector of the vehicle state, including three dimensions of current speed, position, and waiting time | |
| Acceleration (assuming constant, positive at acceleration, and negative at deceleration) | |
| Distance from the current position to the stop line | |
| Travel time (the time interval between the current moment and the moment leaving the stop line) | |
| Guided speed | |
| Current velocity | |
| Total waiting time in the waiting area |
| Parameter | Value |
|---|---|
| The length of the speed induction zone (m) | 60 |
| Maximum speed of manned vehicles (km/h) | 25 |
| Minimum speed of manned vehicles (km/h) | 20 |
| Maximum speed of cargo vehicle (km/h) | 40 |
| Minimum speed of cargo vehicle (km/h) | 30 |
| Maximum acceleration (m/s2) | 2 |
| Maximum deceleration (m/s2) | 2 |
| Safe driving distance (m) | 50 |
| Simulation duration (s) | 3600 |
| Green Light Duration | Red Light Duration | |
|---|---|---|
| Traffic light cycle (s) | 40 s | 20 s |
| Simulation Time/s | Travel Time/s | |
|---|---|---|
| Before Optimization | After Optimization | |
| 300 | 34.9 | 30 |
| 600 | 33 | 26.9 |
| 900 | 37 | 27 |
| 1200 | 33.4 | 26.4 |
| 1500 | 36.7 | 27.8 |
| 1800 | 37.8 | 33.1 |
| 2100 | 32.9 | 28.6 |
| 2400 | 37.3 | 30.2 |
| 2700 | 36.4 | 29.6 |
| 3000 | 34.7 | 28.5 |
| 3300 | 35.5 | 28.3 |
| 3600 | 35 | 29.9 |
| Simulation Time/s | Number of Queuing Vehicles/Vehicle | |
|---|---|---|
| Before Optimization | After Optimization | |
| 300 | 2 | 0 |
| 600 | 1 | 0 |
| 900 | 3 | 1 |
| 1200 | 4 | 1 |
| 1500 | 2 | 0 |
| 1800 | 9 | 7 |
| 2100 | 5 | 5 |
| 2400 | 1 | 0 |
| 2700 | 6 | 3 |
| 3300 | 3 | 3 |
| 3600 | 5 | 4 |
| Simulation Time/s | Delay Time/s | |
|---|---|---|
| Before Optimization | After Optimization | |
| 300 | 3.9 | 3.1 |
| 600 | 2.9 | 1.9 |
| 900 | 5.6 | 2.5 |
| 1200 | 2.5 | 1.9 |
| 1500 | 6 | 2.7 |
| 1800 | 7.5 | 6.4 |
| 2100 | 3.1 | 2.1 |
| 2400 | 6.2 | 4.8 |
| 2700 | 5.4 | 5.1 |
| 3000 | 3.6 | 3.1 |
| 3300 | 5.2 | 4.8 |
| 3600 | 4.6 | 4.5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, C.; Xue, X.; Qin, P.; Dong, L. Research on a Speed Guidance Strategy for Mine Vehicles in Three-Fork Roadways Based on Vehicle–Road Coordination. Sustainability 2023, 15, 15317. https://doi.org/10.3390/su152115317
Zhang C, Xue X, Qin P, Dong L. Research on a Speed Guidance Strategy for Mine Vehicles in Three-Fork Roadways Based on Vehicle–Road Coordination. Sustainability. 2023; 15(21):15317. https://doi.org/10.3390/su152115317
Chicago/Turabian StyleZhang, Chuanwei, Xibo Xue, Peilin Qin, and Lingling Dong. 2023. "Research on a Speed Guidance Strategy for Mine Vehicles in Three-Fork Roadways Based on Vehicle–Road Coordination" Sustainability 15, no. 21: 15317. https://doi.org/10.3390/su152115317
APA StyleZhang, C., Xue, X., Qin, P., & Dong, L. (2023). Research on a Speed Guidance Strategy for Mine Vehicles in Three-Fork Roadways Based on Vehicle–Road Coordination. Sustainability, 15(21), 15317. https://doi.org/10.3390/su152115317