
The Environmental Impacts of Automated Vehicles on Parking: A Systematic Review




Abstract
:1. Introduction
2. Methods
2.1. Definition of the Review Protocol
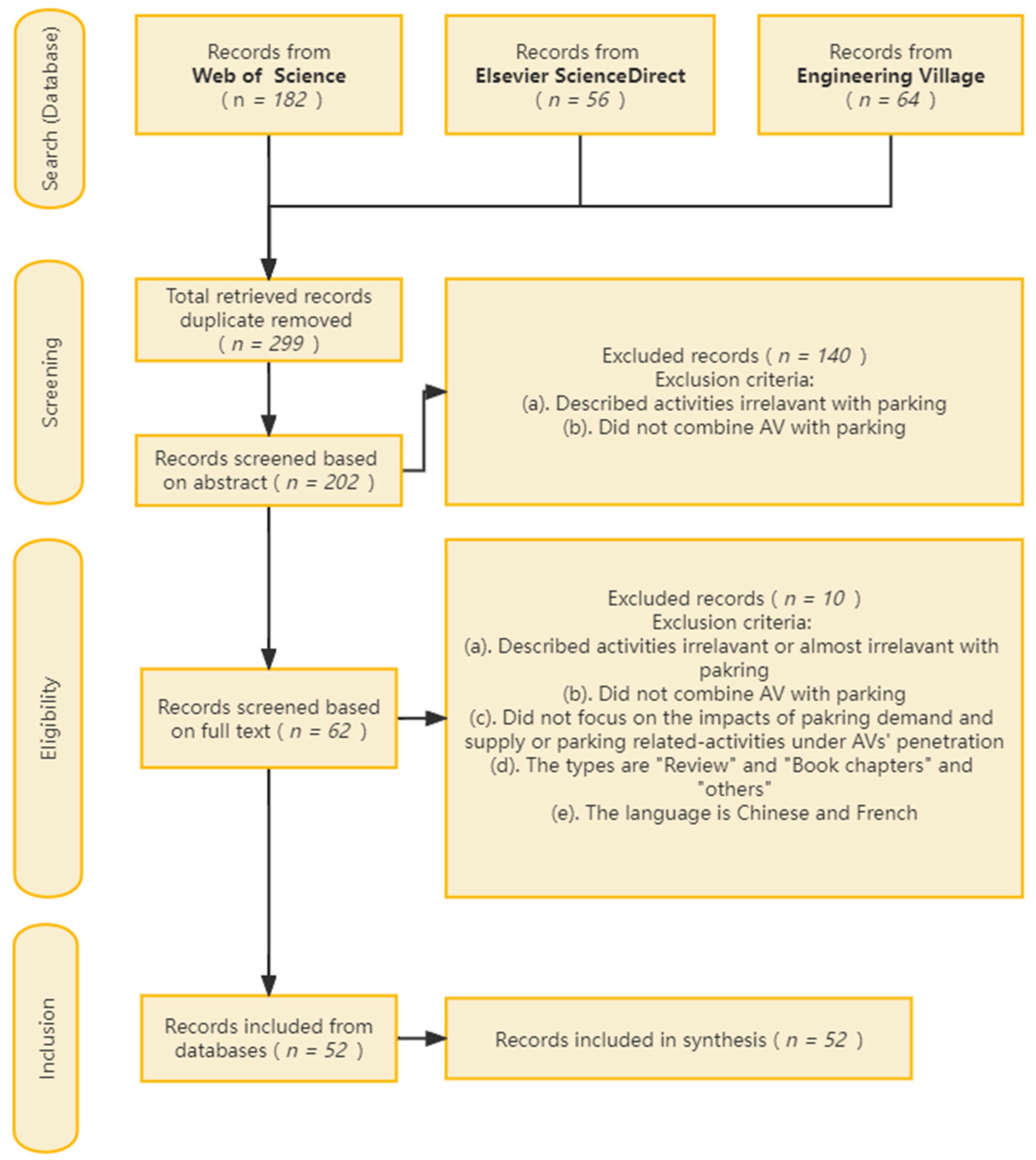
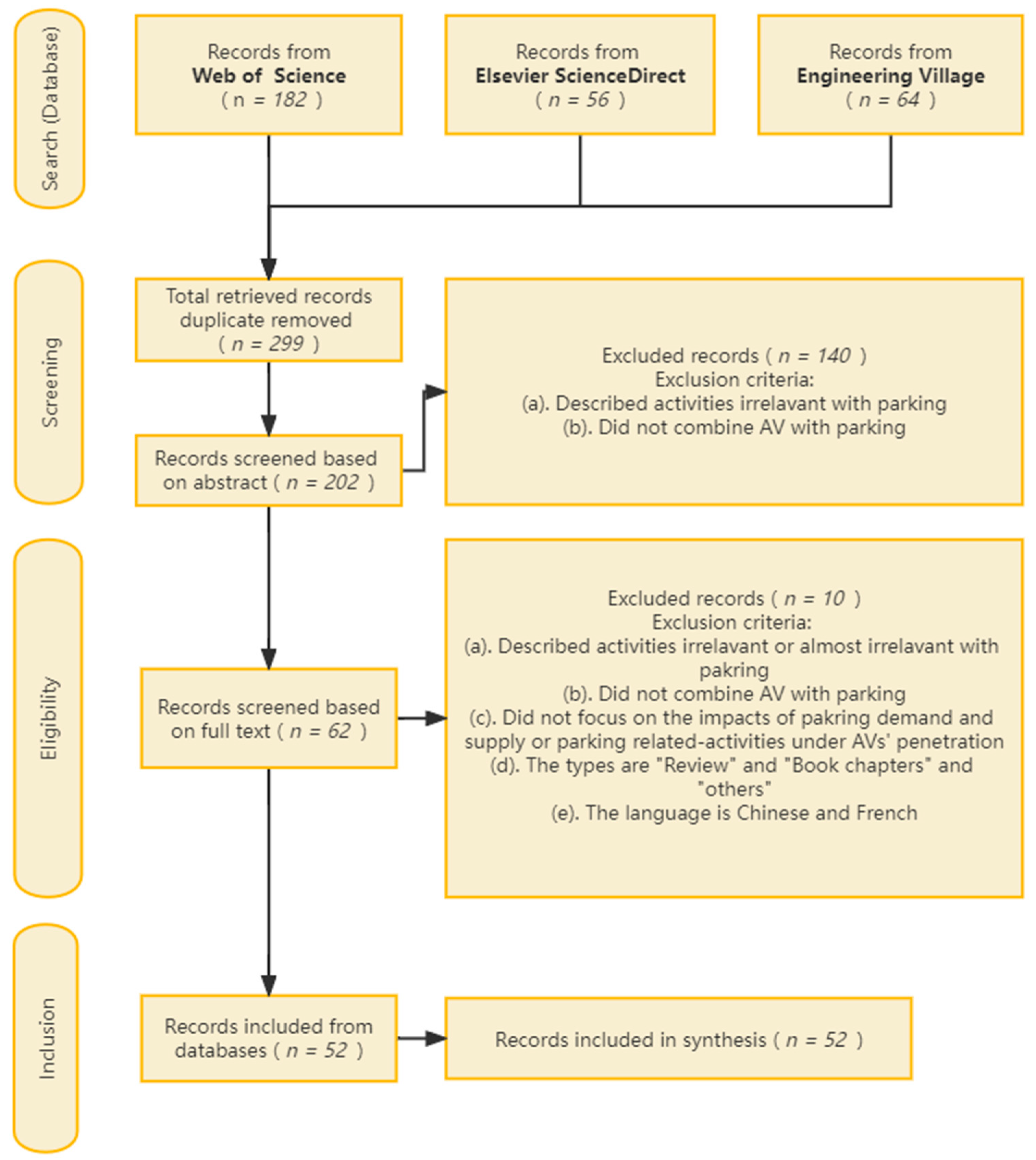
2.2. Data Collection
3. Analysis
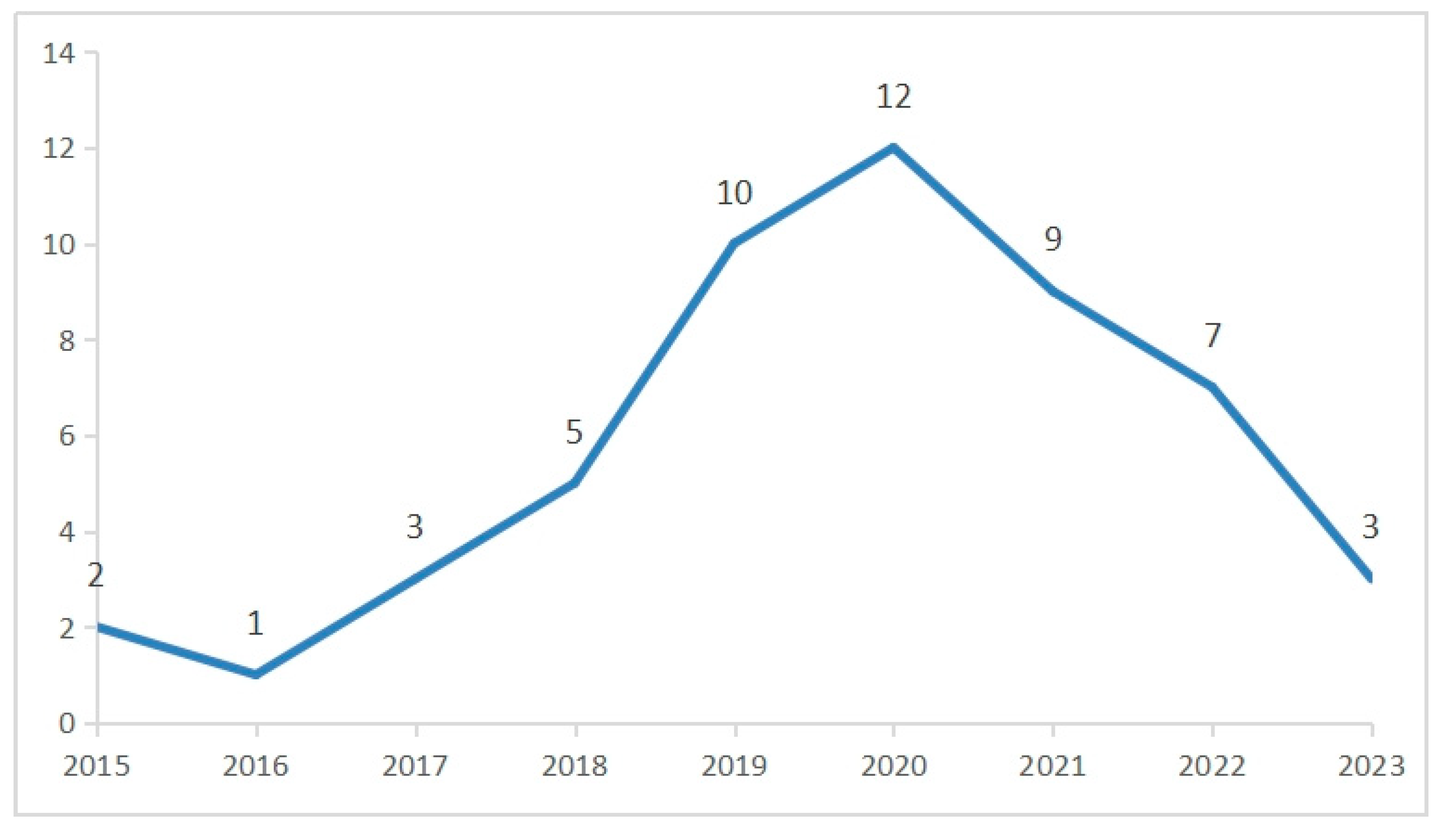
3.1. Result Trends
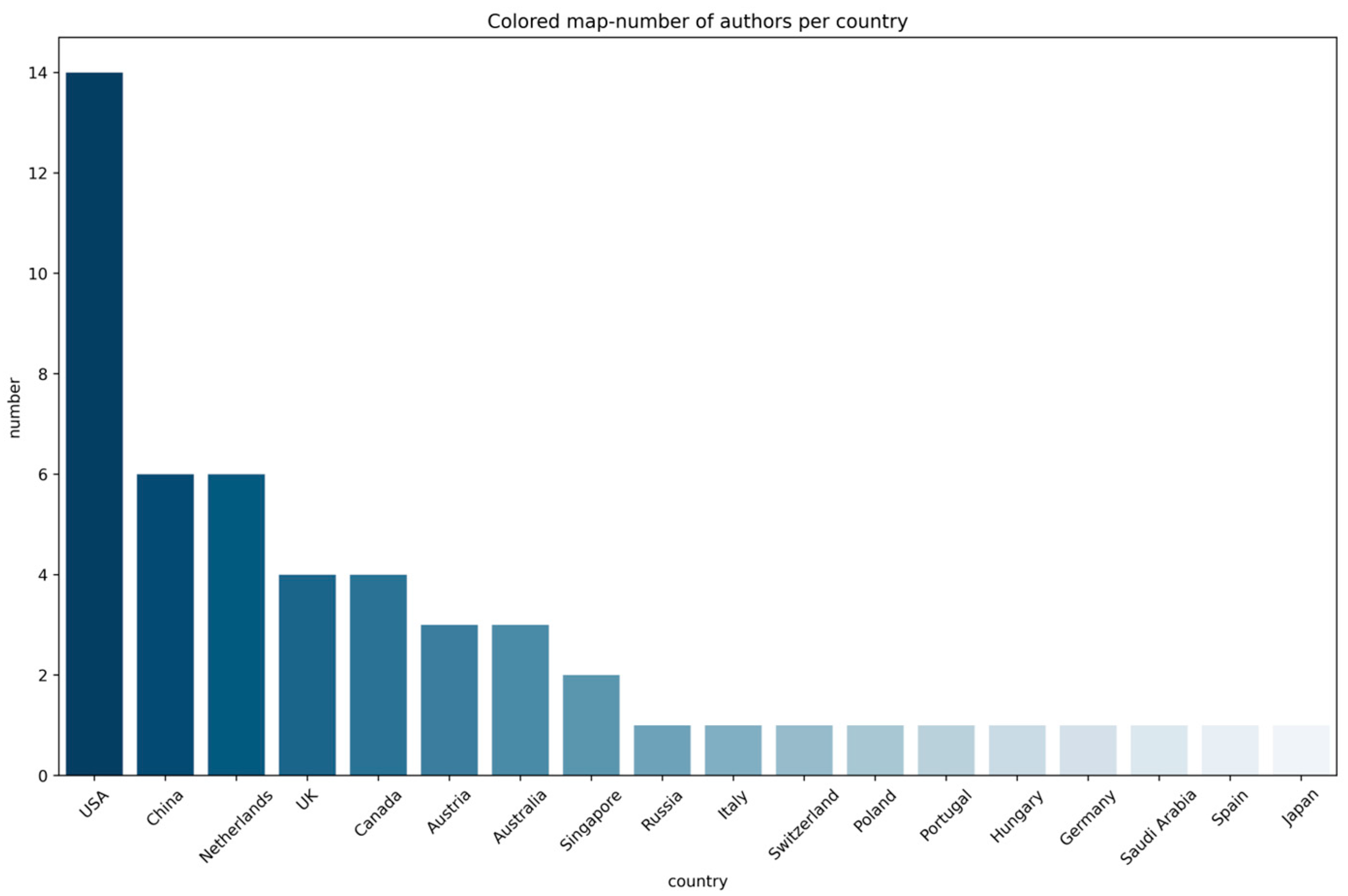
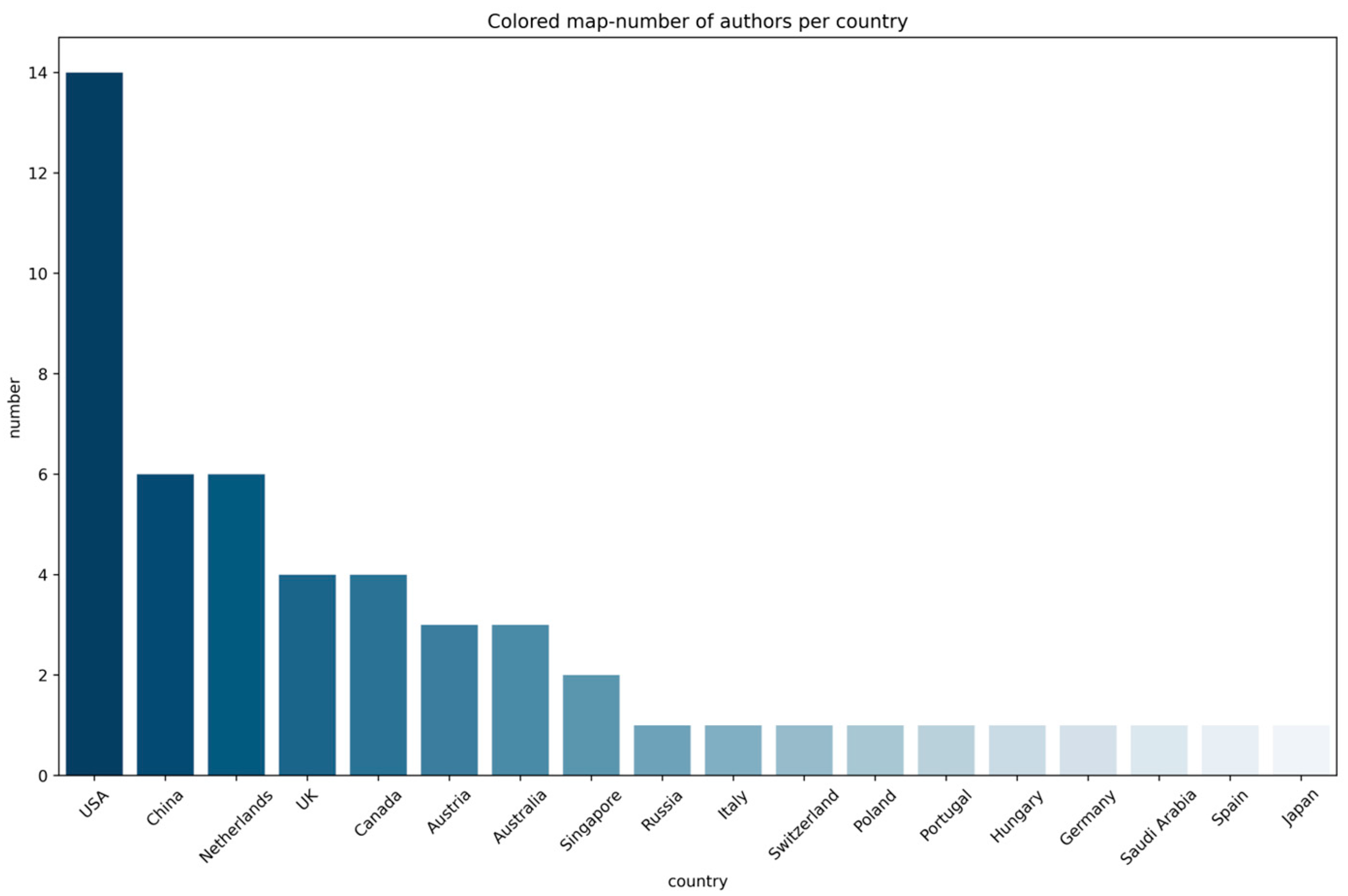
3.2. Contributions by Country
3.3. High-Yield Journals
3.4. Highly-Yield Authors
3.5. Highly Cited Papers
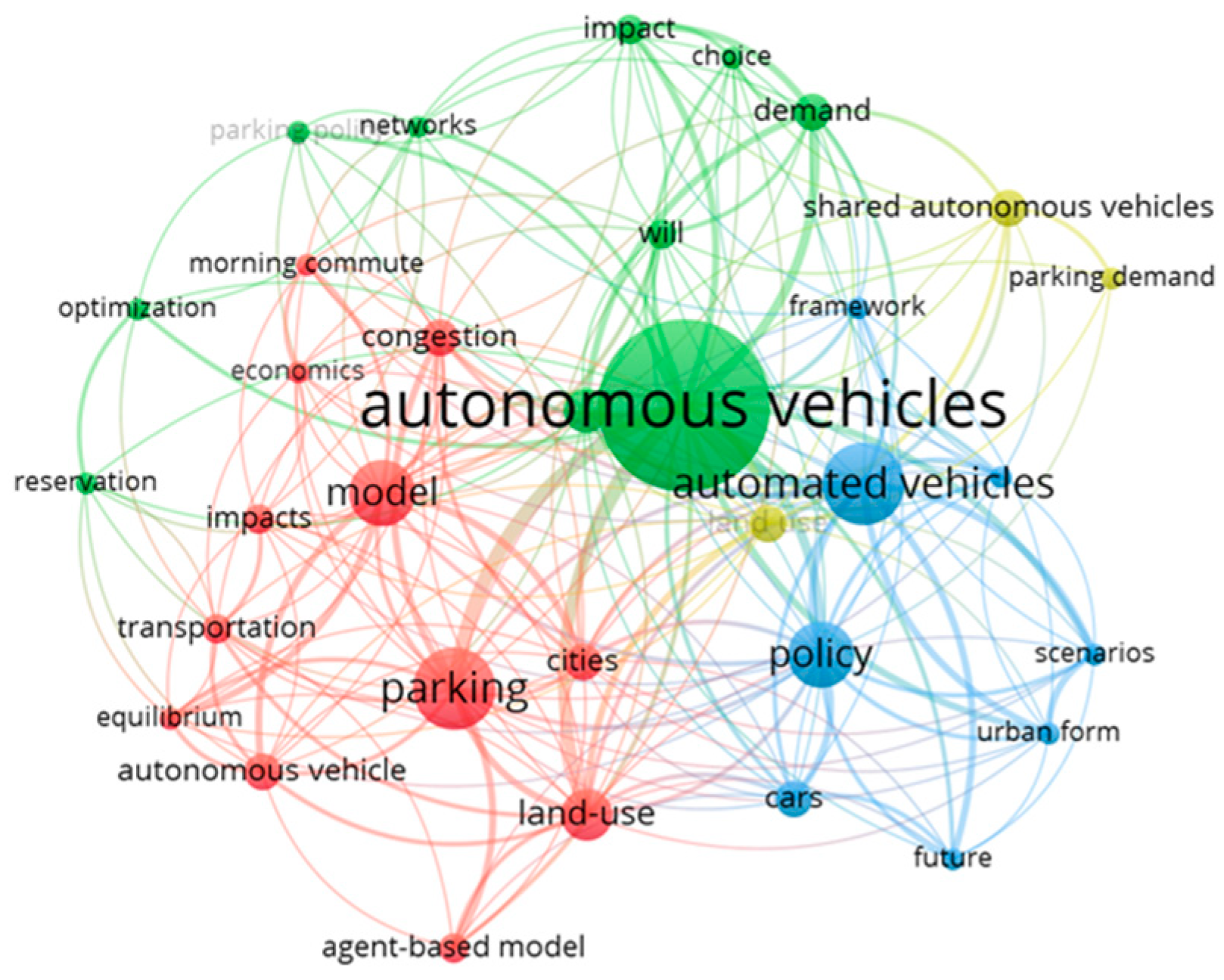
3.6. Keyword Co-Occurrence Network
4. Results
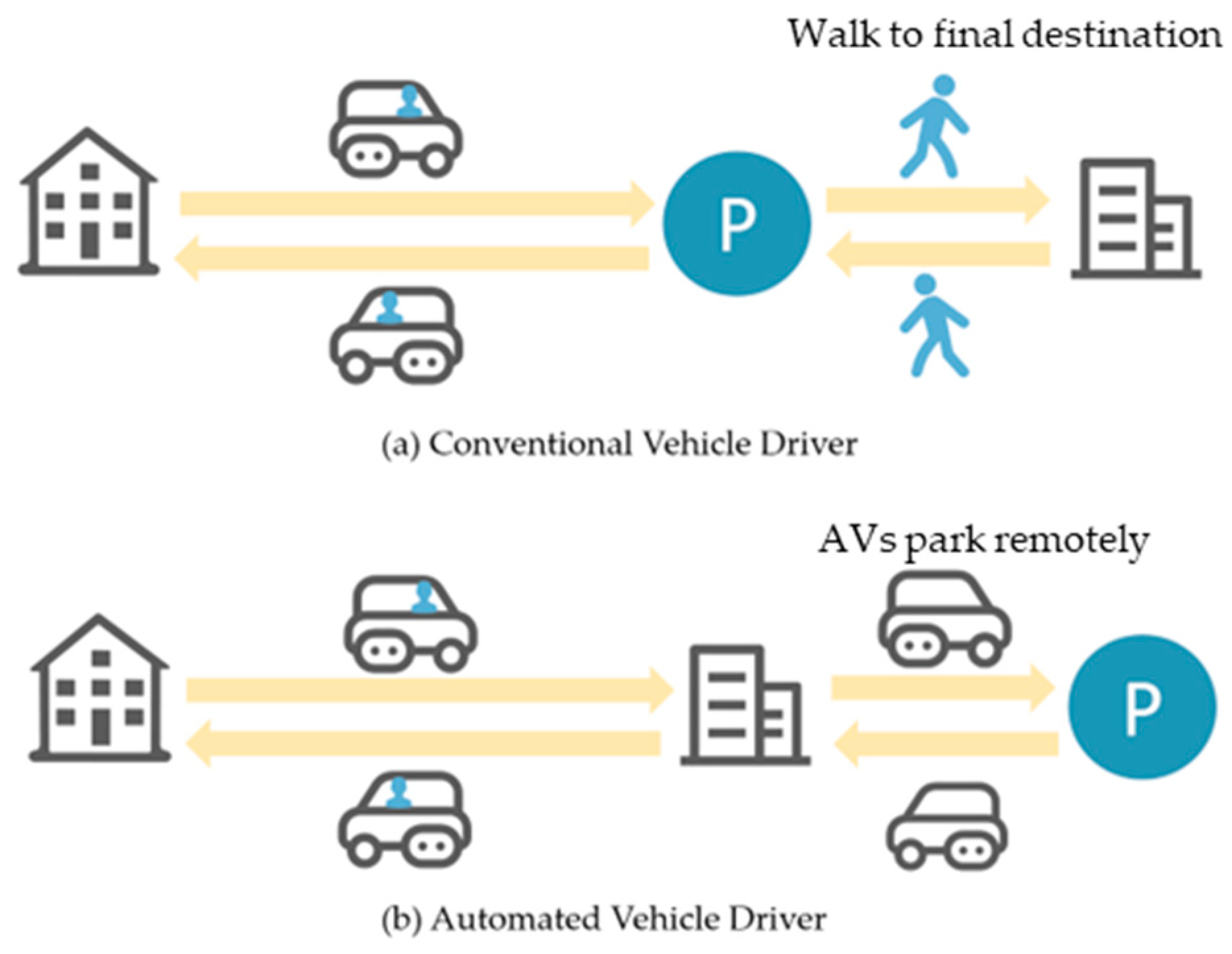
4.1. RQ 1: Different Types of AVs’ Impact on Parking Demand and Supply
4.1.1. Categories of Automated Vehicles
4.1.2. Impact of Automated Vehicles on Parking Demand
4.1.3. Impact of Automated Vehicles on Parking Supply
4.2. RQ 2: The Potential Effects of AVs on the Demand for Parking and the Associated Environmental Impacts
4.2.1. Impact of Automated Vehicles on Land Use
4.2.2. Impact of Automated Vehicles on VMT
4.3. RQ 3: The Implications of AVs on GHG from Parking-Related Activities
4.4. RQ 4: Conversion of Traditional Parking Facilities to Accommodate AVs
4.5. RQ 5: Further Research Directions Recommended in the Reviewed Studies
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Tan, Y.; Ma, R.; Sun, Z. Emission exposure optimum for a single-destination dynamic traffic network. Transp. Res. Part D Transp. Environ. 2021, 94, 102817. [Google Scholar] [CrossRef]
- Yu, B.; Bao, S.; Feng, F.; Sayer, J. Examination and prediction of drivers’ reaction when provided with V2I communication-based intersection maneuver strategies. Transp. Res. Part C Emerg. Technol. 2019, 106, 17–28. [Google Scholar] [CrossRef]
- He, L.; Yu, B.; Chen, Y.; Bao, S.; Gao, K.; Kong, Y. An interpretable prediction model of illegal running into the opposite lane on curve sections of two-lane rural roads from drivers’ visual perceptions. Accid. Anal. Prev. 2023, 186, 107066. [Google Scholar] [CrossRef]
- Li, Z.; Yu, B.; Wang, Y.; Chen, Y.; Kong, Y.; Xu, Y. A novel collision warning system based on the visual road environment schema: An examination from vehicle and driver characteristics. Accid. Anal. Prev. 2023, 190, 107154. [Google Scholar] [CrossRef]
- Yu, B.; Bao, S.; Zhang, Y.; Sullivan, J.; Flannagan, M. Measurement and prediction of driver trust in automated vehicle technologies: An application of hand position transition probability matrix. Transp. Res. Part C Emerg. Technol. 2021, 124, 102957. [Google Scholar] [CrossRef]
- Fagnant, D.J.; Kockelman, K.M. The travel and environmental implications of shared autonomous vehicles, using agent-based model scenarios. Transp. Res. Part C Emerg. Technol. 2014, 40, 1–13. [Google Scholar] [CrossRef]
- Milanés, V.; Shladover, S.E.; Spring, J.; Nowakowski, C.; Kawazoe, H.; Nakamura, M. Cooperative Adaptive Cruise Control in Real Traffic Situations. IEEE Trans. Intell. Transp. Syst. 2014, 15, 296–305. [Google Scholar] [CrossRef]
- Lam, S.; Taghia, J.; Katupitiya, J. Evaluation of a transportation system employing autonomous vehicles. J. Adv. Transp. 2016, 50, 2266–2287. [Google Scholar] [CrossRef]
- Millard-Ball, A. Pedestrians, Autonomous Vehicles, and Cities. J. Plan. Educ. Res. 2016, 38, 6–12. [Google Scholar] [CrossRef]
- NACTO. NACTO Policy Statement on Automated Vehicles. 2016. Available online: https://nacto.org/wp-content/uploads/2016/06/NACTO-Policy-Automated-Vehicles-201606.pdf (accessed on 29 August 2023).
- Malokin, A.; Circella, G.; Mokhtarian, P.L. How do activities conducted while commuting influence mode choice? Using revealed preference models to inform public transportation advantage and autonomous vehicle scenarios. Transp. Res. Part A Policy Pract. 2019, 124, 82–114. [Google Scholar] [CrossRef]
- Shoup, D. Parking and the City, 1st ed.; Routledge: New York, NY, USA, 2018. [Google Scholar]
- Manville, M.; Shoup, D. Parking, People, and Cities. J. Urban Plan. Dev. 2005, 131, 233–245. [Google Scholar] [CrossRef]
- National Parking Association. Parking in America; National Parking Association: Washington, DC, USA, 2008. [Google Scholar]
- Arnott, R.; Inci, E.; Rowse, J. Downtown curbside parking capacity. J. Urban Econ. 2015, 86, 83–97. [Google Scholar] [CrossRef]
- Shoup, D. High Cost of Free Parking, 1st ed.; Routledge: New York, NY, USA, 2021. [Google Scholar]
- Smith, S.; Bellone, J.; Bransfield, S.; Ingles, A.; Noel, G.; Reed, E.; Yanagisawa, M. Benefits Estimation Framework for Automated Vehicle Operations; U.S. Department of Transportation: Washington, DC, USA, 2015. [Google Scholar]
- Fagnant, D.J.; Kockelman, K. Preparing a nation for autonomous vehicles: Opportunities, barriers and policy recommendations. Transp. Res. Part A Policy Pract. 2015, 77, 167–181. [Google Scholar] [CrossRef]
- Wadud, Z.; MacKenzie, D.; Leiby, P. Help or hindrance? The travel, energy and carbon impacts of highly automated vehicles. Transp. Res. Part A Policy Pract. 2016, 86, 1–18. [Google Scholar] [CrossRef]
- Tengilimoglu, O.; Carsten, O.; Wadud, Z. Implications of automated vehicles for physical road environment: A comprehensive review. Transp. Res. Part E Log. Transp. Rev. 2023, 169, 102989. [Google Scholar] [CrossRef]
- Chai, H.; Rodier, C.J.; Song, J.W.; Zhang, M.H.; Jaller, M. The impacts of automated vehicles on Center city parking. Transp. Res. Part A Policy Pract. 2023, 175, 103764. [Google Scholar] [CrossRef]
- Greenblatt, J.B.; Shaheen, S. Automated vehicles, on-demand mobility, and environmental impacts. Curr. Sustain./Renew. Energy Rep. 2015, 2, 74–81. [Google Scholar] [CrossRef]
- Liu, W. An Equilibrium Analysis of Commuter Parking in the Era of Autonomous Vehicles. Transp. Res. Part C Emerg. Technol. 2018, 92, 191–207. [Google Scholar] [CrossRef]
- Zhu, L.; Zhao, Z.; Wu, G. Shared automated mobility with demand-side cooperation: A proof-of-concept microsimulation study. Sustainability 2021, 13, 2483. [Google Scholar] [CrossRef]
- Golbabaei, F.; Yigitcanlar, T.; Bunker, J. The role of shared autonomous vehicle systems in delivering smart urban mobility: A systematic review of the literature. Int. J. Sustain. Transp. 2021, 15, 731–748. [Google Scholar] [CrossRef]
- Duarte, F.; Ratti, C. The Impact of Autonomous Vehicles on Cities: A Review. J. Urban Technol. 2018, 25, 3–18. [Google Scholar] [CrossRef]
- Rahman, M.M.; Thill, J.-C. Impacts of connected and autonomous vehicles on urban transportation and environment: A comprehensive review. Sustain. Cities Soc. 2023, 96, 104649. [Google Scholar] [CrossRef]
- Nascimento, A.M.; Vismari, L.F.; Molina, C.B.S.T.; Cugnasca, P.S.; Camargo, J.B.; de Almeida, J.R.; Inam, R.; Fersman, E.; Marquezini, M.V.; Hata, A.Y. A systematic literature review about the impact of artificial intelligence on autonomous vehicle safety. IEEE Trans. Intell. Transp. Syst. 2019, 21, 4928–4946. [Google Scholar] [CrossRef]
- Jing, P.; Xu, G.; Chen, Y.; Shi, Y.; Zhan, F. The Determinants behind the Acceptance of Autonomous Vehicles: A Systematic Review. Sustainability 2020, 12, 1719. [Google Scholar] [CrossRef]
- Moher, D.; Liberati, A.; Tetzlaff, J.; Altman, D.G. Preferred reporting items for systematic reviews and meta-analyses: The PRISMA statement. Ann. Intern. Med. 2009, 151, 264–269. [Google Scholar] [CrossRef]
- Zhang, W.; Wang, K. Parking futures: Shared automated vehicles and parking demand reduction trajectories in Atlanta. Land Use Policy 2020, 91, 103963. [Google Scholar] [CrossRef]
- Sayarshad, H. Designing intelligent public parking locations for autonomous vehicles. Expert Syst. Appl. 2023, 222, 119810. [Google Scholar] [CrossRef]
- Zhang, W.; Guhathakurta, S.; Fang, J.; Zhang, G. Exploring the impact of shared autonomous vehicles on urban parking demand: An agent-based simulation approach. Sustain. Cities Soc. 2015, 19, 34–45. [Google Scholar] [CrossRef]
- Larson, W.; Zhao, W. Self-driving cars and the city: Effects on sprawl, energy consumption, and housing affordability. Reg. Sci. Urban Econ. 2020, 81, 103484. [Google Scholar] [CrossRef]
- Kondor, D.; Zhang, H.; Tachet, R.; Santi, P.; Ratti, C. Estimating Savings in Parking Demand Using Shared Vehicles for Home–Work Commuting. IEEE Intell. Transp. Syst. 2019, 20, 2903–2912. [Google Scholar] [CrossRef]
- Jia, W.; Donna Chen, T.; Zhang, W. Willingness-to-relocate: Examining preferences for parking relocation of privately-owned automated vehicles. Transp. Res. Part D Transp. Environ. 2022, 108, 103318. [Google Scholar] [CrossRef]
- Wadud, Z. An examination of the effects of ride-hailing services on airport parking demand. J. Air Transp. Manag. 2020, 84, 101783. [Google Scholar] [CrossRef]
- González-González, E.; Nogués, S.; Stead, D. Parking futures: Preparing European cities for the advent of automated vehicles. Land Use Policy 2020, 91, 104010. [Google Scholar] [CrossRef]
- Massar, M.; Reza, I.; Rahman, S.M.; Abdullah, S.M.H.; Jamal, A.; Al-Ismail, F.S. Impacts of Autonomous Vehicles on Greenhouse Gas Emissions-Positive or Negative? Int. J. Environ. Res. Public Health 2021, 18, 23. [Google Scholar] [CrossRef] [PubMed]
- Zhang, W.; Guhathakurta, S. Parking Spaces in the Age of Shared Autonomous Vehicles: How Much Parking Will We Need and Where? Transp. Res. Rec. J. Transp. Res. Board 2017, 2651, 80–91. [Google Scholar] [CrossRef]
- Harper, C.D.; Hendrickson, C.T.; Samaras, C. Exploring the Economic, Environmental, and Travel Implications of Changes in Parking Choices due to Driverless Vehicles: An Agent-Based Simulation Approach. J. Urban Plan. Dev. 2018, 144, 04018043. [Google Scholar] [CrossRef]
- Bruck, E.; Soteropoulos, A. Traffic-land use compatibility and street design impacts of automated driving in Vienna, Austria. J. Transp. Land Use 2022, 15, 137–163. [Google Scholar] [CrossRef]
- Kellett, J.; Barreto, R.; Hengel, A.V.D.; Vogiatzis, N. How Might Autonomous Vehicles Impact the City? The Case of Commuting to Central Adelaide. Urban Policy Res. 2019, 37, 442–457. [Google Scholar] [CrossRef]
- Spurling, N. Parking futures: The relationship between parking space, everyday life and travel demand in the UK. Land Use Policy 2020, 91, 103872. [Google Scholar] [CrossRef]
- Hawkins, J.; Nurul Habib, K. Integrated models of land use and transportation for the autonomous vehicle revolution. Transp. Rev. 2019, 39, 66–83. [Google Scholar] [CrossRef]
- Sousa, N.; Almeida, A.; Coutinho-Rodrigues, J.O.; Natividade-Jesus, E. Dawn of autonomous vehicles: Review and challenges ahead. Munic. Eng. 2017, 2017, 1–32. [Google Scholar] [CrossRef]
- Llorca, C.; Moreno, A.; Ammar, G.; Moeckel, R. Impact of autonomous vehicles on household relocation: An agent-based simulation. Cities 2022, 126, 103692. [Google Scholar] [CrossRef]
- May, A.D.; Shepherd, S.; Pfaffenbichler, P.; Emberger, G. The potential impacts of automated cars on urban transport: An exploratory analysis. Transp. Policy 2020, 98, 127–138. [Google Scholar] [CrossRef]
- Legêne, M.F.; Auping, W.L.; Correia, G.H.d.A.; van Arem, B. Spatial impact of automated driving in urban areas. J. Simul. 2020, 14, 295–303. [Google Scholar] [CrossRef]
- Winter, K.; Cats, O.; Martens, K.; van Arem, B. Parking space for shared automated vehicles: How less can be more. Transp. Res. Part A Policy Pract. 2021, 143, 61–77. [Google Scholar] [CrossRef]
- Zhao, C.; Liao, F.; Li, X.; Du, Y. Macroscopic modeling and dynamic control of on-street cruising-for-parking of autonomous vehicles in a multi-region urban road network. Transp. Res. Part C Emerg. Technol. 2021, 128, 103176. [Google Scholar] [CrossRef]
- Ye, X.; Wang, Y.; Yan, X.; Tao, W.; Chen, J. Optimization Model of Autonomous Vehicle Parking Facilities, Developed With the Nondominated Sorting Genetic Algorithm With an Elite Strategy 2 and by Comparing Different Moving Strategies. IEEE Intell. Transp. Syst. Mag. 2022, 99, 2–20. [Google Scholar] [CrossRef]
- Radvand, T.; Bahrami, S.; Yin, Y.; Laberteaux, K. Curbing cruising-as-substitution-for-parking in automated mobility. Transp. Res. Part C Emerg. Technol. 2022, 143, 103853. [Google Scholar] [CrossRef]
- Bahrami, S.; Roorda, M. Autonomous vehicle parking policies: A case study of the City of Toronto. Transp. Res. Part A Policy Pract. 2022, 155, 283–296. [Google Scholar] [CrossRef]
- Wang, S.; Levin, M.W.; Caverly, R.J. Optimal parking management of connected autonomous vehicles: A control-theoretic approach. Transp. Res. Part C Emerg. Technol. 2021, 124, 102924. [Google Scholar] [CrossRef]
- Su, Q.; Wang, D.Z. On the morning commute problem with distant parking options in the era of autonomous vehicles. Transp. Res. Part C Emerg. Technol. 2020, 120, 102799. [Google Scholar] [CrossRef]
- Silva, D.; Földes, D.; Csiszár, C. Autonomous vehicle use and urban space transformation: A scenario building and analysing method. Sustainability 2021, 13, 3008. [Google Scholar] [CrossRef]
- Levin, M.W.; Wong, E.; Nault-Maurer, B.; Khani, A. Parking infrastructure design for repositioning autonomous vehicles. Transp. Res. Part C Emerg. Technol. 2020, 120, 102838. [Google Scholar] [CrossRef]
- Nourinejad, M.; Bahrami, S.; Roorda, M.J. Designing parking facilities for autonomous vehicles. Transp. Res. Part B Methodol. 2018, 109, 110–127. [Google Scholar] [CrossRef]
- Zakharenko, R. Self-driving cars will change cities. Reg. Sci. Urban Econ. 2016, 61, 26–37. [Google Scholar] [CrossRef]
- Kong, Y.; Le Vine, S.; Liu, X. Optimal storage and loading zones within surface parking facilities for privately owned automated vehicles. IET Intell. Transp. Syst. 2019, 13, 1754–1760. [Google Scholar] [CrossRef]
- Nourinejad, M.; Roorda, M.J. Cruising for Parking with Autonomous and Conventional Vehicles. J. Adv. Transp. 2021, 2021, 1–16. [Google Scholar] [CrossRef]
- Millard-Ball, A. The autonomous vehicle parking problem. Transp. Policy 2019, 75, 99–108. [Google Scholar] [CrossRef]
- Shafiei, S.; Gu, Z.; Grzybowska, H.; Cai, C. Impact of self-parking autonomous vehicles on urban traffic congestion. Transportation 2023, 50, 183–203. [Google Scholar] [CrossRef]
- González-González, E.; Nogués, S.; Stead, D. Automated vehicles and the city of tomorrow: A backcasting approach. Cities 2019, 94, 153–160. [Google Scholar] [CrossRef]
- Maciejewski, M.; Bischoff, J. Congestion effects of autonomous taxi fleets. Transport 2018, 33, 971–980. [Google Scholar] [CrossRef]
- Gawron, J.H.; Keoleian, G.A.; De Kleine, R.D.; Wallington, T.J.; Kim, H.C. Deep decarbonization from electrified autonomous taxi fleets: Life cycle assessment and case study in Austin, TX. Transp. Res. Part D Transp. Environ. 2019, 73, 130–141. [Google Scholar] [CrossRef]
- Emberger, G.; Pfaffenbichler, P. A quantitative analysis of potential impacts of automated vehicles in Austria using a dynamic integrated land use and transport interaction model. Transp. Policy 2020, 98, 57–67. [Google Scholar] [CrossRef]
- Räth, Y.M.; Balac, M.; Hörl, S.; Axhausen, K.W. Assessing service characteristics of an automated transit on-demand service. J. Urban Mobility 2023, 3, 100038. [Google Scholar] [CrossRef]
- Liang, X.; de Almeida Correia, G.H.; Van Arem, B. An optimization model for vehicle routing of automated taxi trips with dynamic travel times. Transp. Res. Proc. 2017, 27, 736–743. [Google Scholar] [CrossRef]
- Stead, D.; Vaddadi, B. Automated vehicles and how they may affect urban form: A review of recent scenario studies. Cities 2019, 92, 125–133. [Google Scholar] [CrossRef]
- Alessandrini, A.; Campagna, A.; Delle Site, P.; Filippi, F.; Persia, L. Automated vehicles and the rethinking of mobility and cities. Transp. Res. Proc. 2015, 5, 145–160. [Google Scholar] [CrossRef]
- Dia, H.; Javanshour, F. Autonomous shared mobility-on-demand: Melbourne pilot simulation study. Transp. Res. Proc. 2017, 22, 285–296. [Google Scholar] [CrossRef]
- Bahrami, S.; Roorda, M.J. Autonomous vehicle relocation problem in a parking facility. Transp. Res. Proc. 2020, 16, 1604–1627. [Google Scholar] [CrossRef]
- Kang, D.; Hu, F.; Levin, M. Impact of automated vehicles on traffic assignment, mode split, and parking behavior. Transp. Res. Part D Transp. Environ. 2022, 104, 103200. [Google Scholar] [CrossRef]
- Soteropoulos, A.; Berger, M.; Ciari, F. Impacts of automated vehicles on travel behaviour and land use: An international review of modelling studies. Transp. Rev. 2019, 39, 29–49. [Google Scholar] [CrossRef]
- Kumakoshi, Y.; Hanabusa, H.; Oguchi, T. Impacts of shared autonomous vehicles: Tradeoff between parking demand reduction and congestion increase. Transp. Res. Interdiscip. Perspect. 2021, 12, 100482. [Google Scholar] [CrossRef]
- Bahrami, S.; Vignon, D.; Yin, Y.; Laberteaux, K. Parking management of automated vehicles in downtown areas. Transp. Res. Part C Emerg. Technol. 2021, 126, 103001. [Google Scholar] [CrossRef]
- Okeke, O.B. The impacts of shared autonomous vehicles on car parking space. Case Stud. Transp. Policy 2020, 8, 1307–1318. [Google Scholar] [CrossRef]
- Zhao, D.; Li, X.; Cui, J. A simulation-based optimization model for infrastructure planning for electric autonomous vehicle sharing. Comput. Aided Civ. Infrastruct. Eng. 2021, 36, 858–876. [Google Scholar] [CrossRef]
- Guo, Y.; Souders, D.; Labi, S.; Peeta, S.; Benedyk, I.; Li, Y. Paving the way for autonomous Vehicles: Understanding autonomous vehicle adoption and vehicle fuel choice under user heterogeneity. Transp. Res. Part A Policy Pract. 2021, 154, 364–398. [Google Scholar] [CrossRef]
- Kong, Y.; Le Vine, S.; Liu, X. Capacity impacts and optimal geometry of automated cars’ surface parking facilities. J. Adv. Transp. 2018, 2018, 8717. [Google Scholar] [CrossRef]
- Page, M.J.; McKenzie, J.E.; Bossuyt, P.M.; Boutron, I.; Hoffmann, T.C.; Mulrow, C.D.; Shamseer, L.; Tetzlaff, J.M.; Akl, E.A.; Brennan, S.E.; et al. The PRISMA 2020 statement: An updated guideline for reporting systematic reviews. BMJ 2021, 372, n71. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Inclusion Criteria | Exclusion Criteria |
|---|---|
| Written in English | Articles written in other languages |
| Research articles | Reviews, books or chapters, lecture notes, or encyclopedia |
| AVs/automated vehicles/autonomous vehicles/self-driving vehicles/driverless vehicles | Non-AVs |
| Database | Search Terms Protocol | Additional Information |
|---|---|---|
| Web of Science | (“Automated vehicles” OR “Autonomous vehicles” OR “Self-driving cars” OR “Driverless cars” OR “Connected and automated vehicles”) AND (“Parking” OR “Parking facilities” OR “Parking management” OR “Parking strategies” OR “Parking infrastructure” OR “Parking demand”) | -Search in the fields “Abstract” -Search in all publication dates -179 initial results |
| ScienceDirect | (“Automated vehicles” OR “Autonomous vehicles” OR “Self-driving cars” OR “Driverless cars” OR “Connected and automated vehicles”) AND (“Parking”) AND (“impacts”) | -Search in the fields “Title”, “Abstract” or “Author-specified Keywords” -Search in all publication dates -56 initial results |
| Engineering Village | (“Automated vehicles” OR “Autonomous vehicles” OR “Self-driving cars” OR” Driverless cars” OR “Connected and automated vehicles”) AND (“Parking”) AND (“impacts”) | -Search in the field “Subject/Title/Abstract” -Search in all publication dates -64 initial results |
| Journal | Number |
|---|---|
| Transportation Research Part C-Emerging Technologies | 6 |
| Transportation Research Part D-Transport and Environment | 3 |
| Transportation Research Procedia | 3 |
| Transport Policy | 3 |
| Land Use Policy | 3 |
| Cities | 3 |
| Author | Records | Citations |
|---|---|---|
| Bahrami, S. | 5 | 226 |
| Zhang, W. W. | 4 | 673 |
| Stead, D. | 3 | 215 |
| Roorda, M. J. | 3 | 191 |
| Levin, M. W. | 3 | 60 |
| Authors | Citations | Paper Title |
|---|---|---|
| Zhang, W. et al. [33] | 447 | Exploring the impact of shared autonomous vehicles on urban parking demand: an agent-based simulation approach. |
| Alessandrini, A. et al. [72] | 367 | Automated vehicles and the rethinking of mobility and cities. |
| Soteropoulos, A. et al. [76] | 356 | Impacts of automated vehicles on travel behaviour and land use: an international review of modelling studies. |
| Zakharenko R. [60] | 222 | Self-driving cars will change cities. |
| Nourinejad, M. et al. [59] | 185 | Designing parking facilities for autonomous vehicles. |
| Zhang, W., Guhathakurta, S. [40] | 169 | Parking spaces in the age of shared autonomous vehicles: how much parking will we need and where? |
| Millard-Ball, A. [20] | 160 | The autonomous vehicle parking problem. |
| Dia, H., Javanshour, F. [73] | 124 | Autonomous shared mobility-on-demand: Melbourne pilot simulation study. |
| Maciejewski, M., Bischoff, J. [66] | 117 | Congestion effects of autonomous taxi fleets. |
| Stead, D., Vaddadi, B. [71] | 93 | Automated vehicles and how they may affect urban form: a review of recent scenario studies. |
| Level | Name | Narrative Definition | Reference |
|---|---|---|---|
| 0 | No driving automation | The driver performs the entire Dynamic Driving Task (DDT), even when enhanced by active safety systems. | [37] |
| 1 | Driver assistance | A Driving Automation System (DAS) controls either the lateral or longitudinal vehicle motion subtask of the DDT, but not both simultaneously, expecting the driver to perform the remainder of the DDT. | [31,38] |
| 2 | Partial driving automation | A DAS controls both the lateral and longitudinal vehicle motion subtasks of the DDT, expecting the driver to complete the Object and Event Detection and Response (OEDR) tasks and supervise the DAS. | [31,38,39] |
| 3 | Conditional driving automation | An Automated Driving System (ADS) manages the whole DDT while expecting the user to be ready for fallback and to respond to system requests or failures. | [31,38,43] |
| 4 | High driving automation | An ADS performs the entire DDT and DDT fallback without any expectation for a user to respond to a request to intervene. | [31,34,38,41,43,48,49,55,57,60,61,63,64,67,68,70,75,78] |
| 5 | Full driving automation | An ADS performs the entire DDT and DDT fallback unconditionally (i.e., not operational design domain-specific) without any expectation for a user to respond to a request to intervene. | [36,37,38,39,41,47,48,49,52,55,56,57,58,60,61,62,63,64,66,68,70,73,75,77,78,79] |
| Vehicle Type | Environmental Impact | Cases | Methods | Key Factors | Results | References |
|---|---|---|---|---|---|---|
| PAVs | Positive and negative | Atlanta, GA USA | Agent-based simulation model | AVs and shared mobility modes | Decreased off-street parking demand; increased mixed-use and residential parking demand | [31] |
| Positive | Budapest, Hungary | Scenario building and urban space transformation model | People’s acceptance of AVs | Scenarios featuring substantial shared AVs utilization indicate that parking demand could be reduced by nearly 83% | [57] | |
| SAVs | Positive | Hypothetical 10 × 10 mi city | Agent-based simulation model | Vehicle fleet size | Up to 90% reduction in parking demand | [33] |
| Positive | Singapore | Data-driven methodology | Total traveled kilometers increasing | Up to 90% reduction by people switching to SAVs | [35] | |
| Positive and negative | Atlanta, USA | Discrete Event Simulation (DES) framework and travel demand OD matrix | Parking cost | 4.5% reduction in CBD parking demand; increased demand in low-income zones | [40] | |
| Positive | Budapest, Hungary | Scenario building and urban space transformation model | Fleet size, modal share, vehicle ownership, parking preference | 33%–83% reduction in parking demand | [57] | |
| Positive | Seattle, USA and Grid network | Agent-based model | SAVs fleet size and AVs penetration rate | Parking lot shifts with 50% vehicle automation | [41] | |
| Positive | N/A | SWOT analysis | PUDO activity | Increased the use of on-demand services; reduced self-parking space | [46] | |
| Positive | Grid-based city | Travel demand, agent-based, and Activity-based model | SAVs fleet size and ridesharing size | Reduced parking spaces needed | [76] | |
| Positive | Okinawa, Japan | Dynamic traffic flow simulator | SAVs scenario and traffic flow | 94.0% reduction in parking demand | [77] | |
| Positive | University of the West of England (UWE), Frenchay campus | DES model | SAVs fleet size | Increase in spaces released with SAVs fleet size | [79] | |
| ATs | Positive | Berlin, Germany and Brandenburg area | Multi-agent transport simulation MATSim | ATs fleet size | Increasing SAV fleet size leads to more released parking spaces | [66] |
| Positive | Austin, TX, USA | Life-cycle assessment framework | ATs fleet size | 1.5% decrease in parking demand | [67] |
| Study (Author) | Vehicle Dimensions (l × w) | Layout/Design | Key Findings |
|---|---|---|---|
| [52] | Regular: 6 m × 2.5 m, AVs: 5 m × 2.5 m | Multirow layout | Traditional double-row max: 100 spaces. AVs era max: 255 spaces. Utilization: 99%. |
| [59] | Regular: 5 m × 2.8 m, AVs: 5 m × 2 m | Two-column design for lower demand; bigger islands with more columns for higher demand | AVs car parks reduce parking space needs by 62% on average, up to 87%. |
| [61] | 2.64 m × 6 m | Addition of a PUDO zone | The optimal number of PUDO channels is two, yielding a net revenue of $405.24 over 8 hours. |
| [79] | 4.8 m × 2.4 m | Not specified | 10% SAVs implementation leads to a 12% increase in released land space. |
| [82] | Low-turnover: 2.64 m × 6 m, High-turnover: 2.74 m × 6 m | Double-row layout | Compared to “large” human parking spaces, efficiency gains range from 11% to 49%. |
| Title | Case | Key Factors | Results | Literature |
|---|---|---|---|---|
| Self-driving cars and the city: Effects on sprawl, energy consumption, and housing affordability | N/A | Reduced transportation costs and increased urban land availability | Decline in parking area requirement | [34] |
| Estimating savings in parking demand using shared vehicles for home work commuting | N/A | Shared mobility | Potential liberation of parking spaces | [35] |
| Parking futures: Preparing European cities for the advent of automated vehicles | N/A | Limitation of excessive AVs usage | Repurposing road and parking spaces for a greener city | [38] |
| Parking spaces in the age of shared autonomous vehicles: How much parking will we need and where? | Atlanta, USA | Penetration rate of SAVs | Approximately 4.5% reduction in parking land usage | [40] |
| Traffic land use compatibility and street design impacts of automated driving in Vienna, Austria | Vienna, Austria | Street space modifications | Enhancement in street livability | [42] |
| Spatial impact of automated driving in urban areas | Copenhagen metropolitan region | Usage of AVs | Duality of increased city sprawl and decreased road surface area | [49] |
| Designing parking facilities for autonomous vehicles | N/A | Redesign of parking facilities | A potential 62% reduction in parking space, reaching up to 87% in specific scenarios | [59] |
| Self-driving cars will change cities | N/A | Parking relocation | A decrease in the parking area at the cost of more empty travel | [60] |
| Assessing service characteristics of an automated transit on-demand service | Zurich, Switzerland | Cruising of vehicles | Potential to reduce public parking spaces, albeit with a minor surge in vehicle kilometers traveled | [69] |
| Automated vehicles and how they may affect urban form: a review of recent scenario studies | N/A | Adoption of AVs | Conversion of parking areas for alternative purposes | [71] |
| Automated vehicles and the rethinking of mobility and cities | N/A | Vehicle ownership | A reduction in space required for vehicle parking | [72] |
| Impact of automated vehicles on traffic assignment, mode split, and parking behavior | N/A | Cruising of vehicles | Scenario-based reduction in parking needs, ranging from 14.60% to 32.27% | [75] |
| The impacts of shared autonomous vehicles on car parking space | UWE Frenchay Campus | SAVs fleet size | Incremental release of parking spaces in tandem with SAVs fleet growth | [79] |
| Causes | Environmental Impact | Methods | Cases | Key Factors | References |
|---|---|---|---|---|---|
| Faster travel | Negative | Pedestrian questionnaire survey | Adelaide CBD | Rise in total trips | [43] |
| Negative | Think-tank model and target-oriented approach (initial stage) | N/A | Increased motorization and comfort | [65] | |
| Negative | Delphi survey | Multiple European cities | Increase in vehicular travel | [72] | |
| Travel by underserved populations | Negative | Questionnaire survey | Adelaide CBD | Growing demand for AVs trips | [43] |
| Mode shift | Negative | Agent-based simulation | Atlanta Metropolitan | Relocation of parking | [31] |
| Negative | Agent-based simulation | Hypothetical 10 × 10 mi grid city | Rise in empty vehicle cruising | [33] | |
| Negative | Data-driven approach | Singapore | Relocation of parking for home-work commuting | [35] | |
| Negative | Large-scale activity-based simulation | Amsterdam | Restricted parking facilities | [50] | |
| Positive | Agent-based simulation | Toronto | Toll for zero-occupant AVs | [54] | |
| Positive | Agent-based demand simulation | Melbourne, Australia | Distance-based pricing | [64] | |
| Negative | Life-cycle assessment framework | Austin, Texas | Empty kilometers caused by AT fleet | [67] | |
| Positive | Agent-based simulation | Zurich, Switzerland | Implementation of cordon charge | [69] | |
| Positive | System dynamics | N/A | Reduction in parking search time | [48] | |
| Empty miles travel | Negative | P-median problem Lagrangian relaxation algorithm | New York City | Increased vehicle cruising | [32] |
| Negative/ Positive | Stated preference survey | Seattle and Kansas City | Trip purpose, individual socio-economic and household characteristics, and local contexts | [36] | |
| Negative | Agent-based model | Seattle | Penetration rates of AVs | [41] | |
| Negative | Logit model | N/A | AVs empty repositioning | [58] | |
| Negative | SAVs dispatcher and SOUND dynamic traffic flow simulator | Okinawa, Japan | Expansion in SAVs fleet size | [77] |
| Causes | Impact on GHG | Research Methods | Main Findings | Reference |
|---|---|---|---|---|
| Idling | Increase | Stated preference survey | Consideration needed for significant empty VMT from PAVs relocation | [36] |
| Increase (56% and 42%) | System dynamics model | Potential car-km increase over 50% by 2050 | [48] | |
| Increase | Large-scale activity-based simulation | The proposed parking management strategy leads to evenly distributed ATs in the network. | [50] | |
| Cruising for Parking | Increase (2.5% and 2.1% at 100% AVs penetration rate) | Agent-based simulation | AVs (5–25% penetration) travel an extra 5.6–6.4 km/day on average | [41] |
| Reduce | Agent-based simulation | A toll for zero-occupant AVs leads to the vehicle kilometers traveled decreasing by 3.5% in downtown Toronto. | [54] | |
| Reduce | Modified static traffic assignment and logit model | Adjusted parking costs effectively diminish congestion caused by vacant vehicle repositioning. | [58] | |
| Reduce | Life-cycle assessment framework | A 60% reduction in cumulative energy and GHG emissions by electrified AT fleet, up to 87% gained by dynamic ridesharing, efficient energy systems, extended vehicle usage time, etc. | [67] | |
| Increase | Optimization model | Scenarios with AVs can lead to approximately a 50% increment in average travel time. | [75] | |
| PUDO Activity | Increase | Canonical mono-centric city model rendition | Urban sprawl and longer commutes | [34] |
| Category | Segment | Reference |
|---|---|---|
| Technology | Electric AVs | [31,32,34,41] |
| Shared AVs | [35,54,55,57,66,76,78] | |
| Integrate AVs with traditional traffic | [46,52,56,75] | |
| Combining emergent sources of data (MAAS, ride-share apps) | [44] | |
| Automation of public transport | [48] | |
| Policy | Parking policy | [31,38,39,54,65,68] |
| Parking management strategy | [50,51] | |
| Congestion pricing scheme | [51,54,60,62,64] | |
| Model | Simulation of real road networks | [34,41] |
| Changes in travel demand | [31,40,41,46,47,52,67] | |
| Land use | [31,39,42,45,47,76,77] | |
| Changes in transportation mode choices | [35,73] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kong, Y.; Ou, J.; Chen, L.; Yang, F.; Yu, B. The Environmental Impacts of Automated Vehicles on Parking: A Systematic Review. Sustainability 2023, 15, 15033. https://doi.org/10.3390/su152015033
Kong Y, Ou J, Chen L, Yang F, Yu B. The Environmental Impacts of Automated Vehicles on Parking: A Systematic Review. Sustainability. 2023; 15(20):15033. https://doi.org/10.3390/su152015033
Chicago/Turabian StyleKong, You, Jihong Ou, Longfei Chen, Fengchun Yang, and Bo Yu. 2023. "The Environmental Impacts of Automated Vehicles on Parking: A Systematic Review" Sustainability 15, no. 20: 15033. https://doi.org/10.3390/su152015033
APA StyleKong, Y., Ou, J., Chen, L., Yang, F., & Yu, B. (2023). The Environmental Impacts of Automated Vehicles on Parking: A Systematic Review. Sustainability, 15(20), 15033. https://doi.org/10.3390/su152015033