
Integrated Reactive Power Optimisation for Power Grids Containing Large-Scale Wind Power Based on Improved HHO Algorithm

 ,
,
Abstract
:1. Introduction
2. Integrated Reactive Power Optimisation Model Construction and Solution
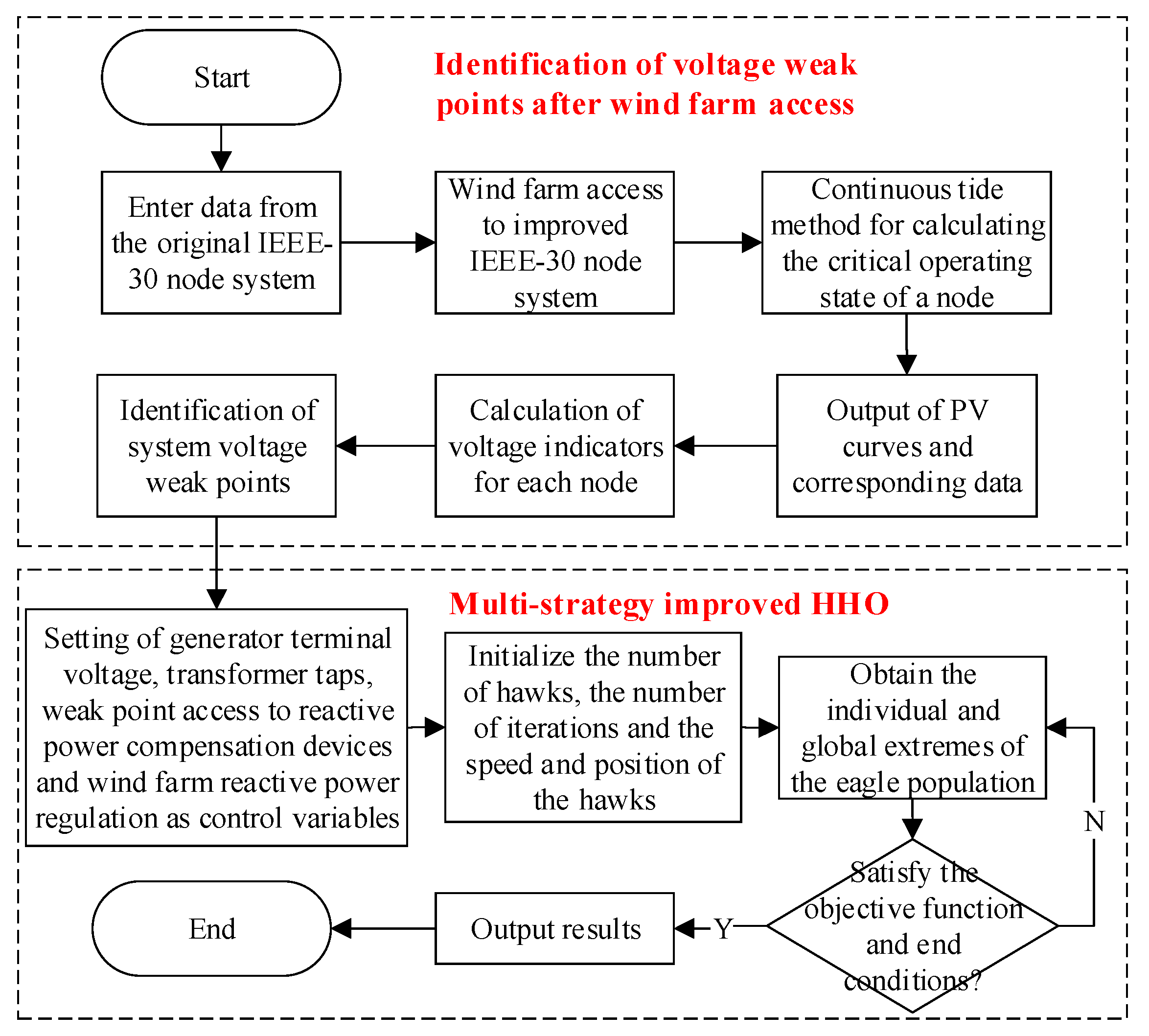
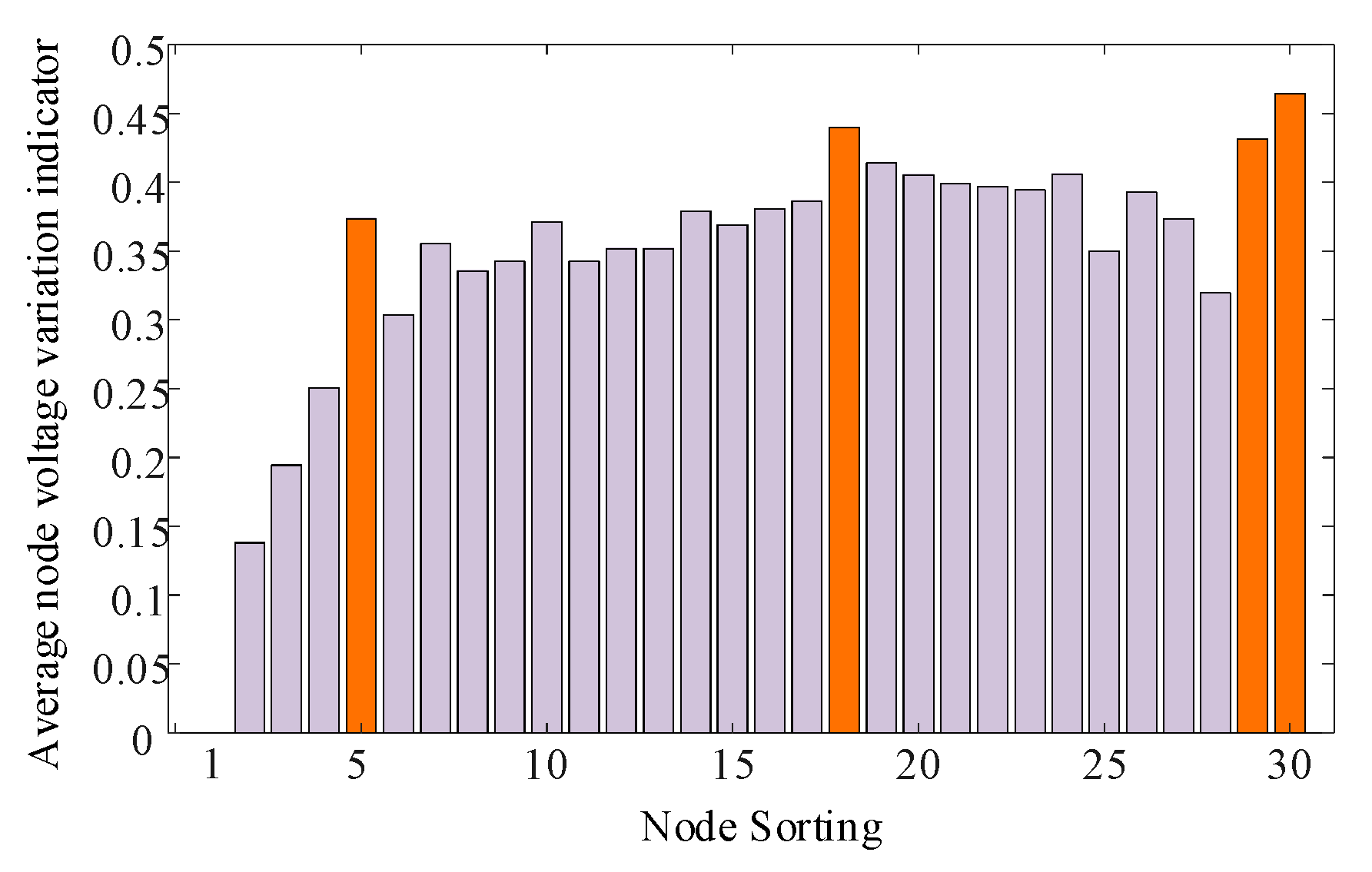
- Determine the voltage weak nodes of the system based on the continuous flow method and use the identified voltage weak nodes as the access points of reactive power compensation equipment.
- Analyse the reactive power regulation margin of the doubly fed turbine and use it as one of the optimisation variables to perform reactive power optimisation.
- For actual wind farms, the comprehensive reactive power optimisation solution model is constructed by considering the current constraints and the inequality constraints on the constraint control variables, with the node voltage deviation, line loss and equipment investment cost being the objective functions.
- Use the multi-strategy improved HHO algorithm to solve the comprehensive reactive power optimisation model and analyse the results.
3. Integrated Reactive Power Optimisation Method Considering Turbine Reactive Power Regulation Margins
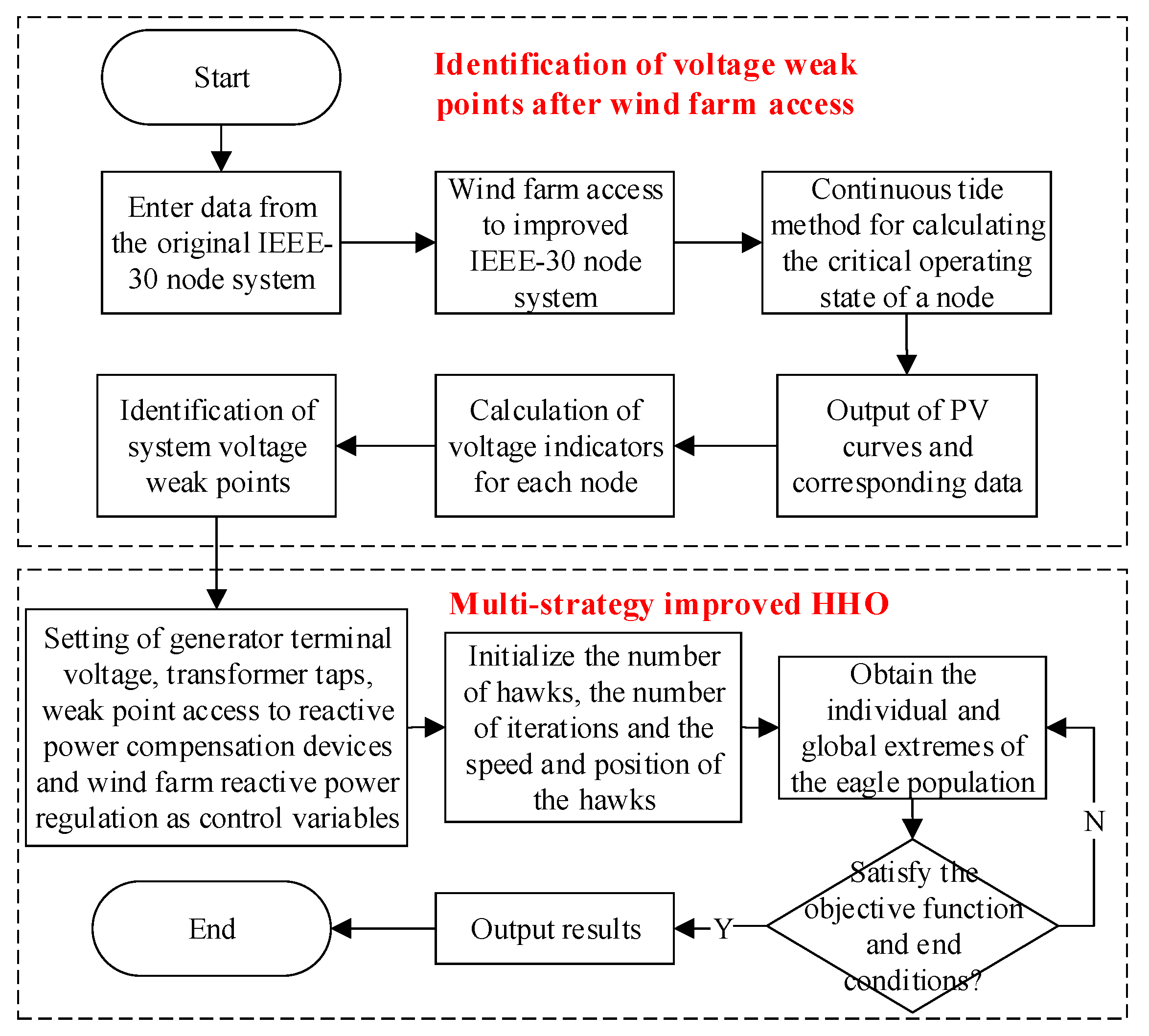
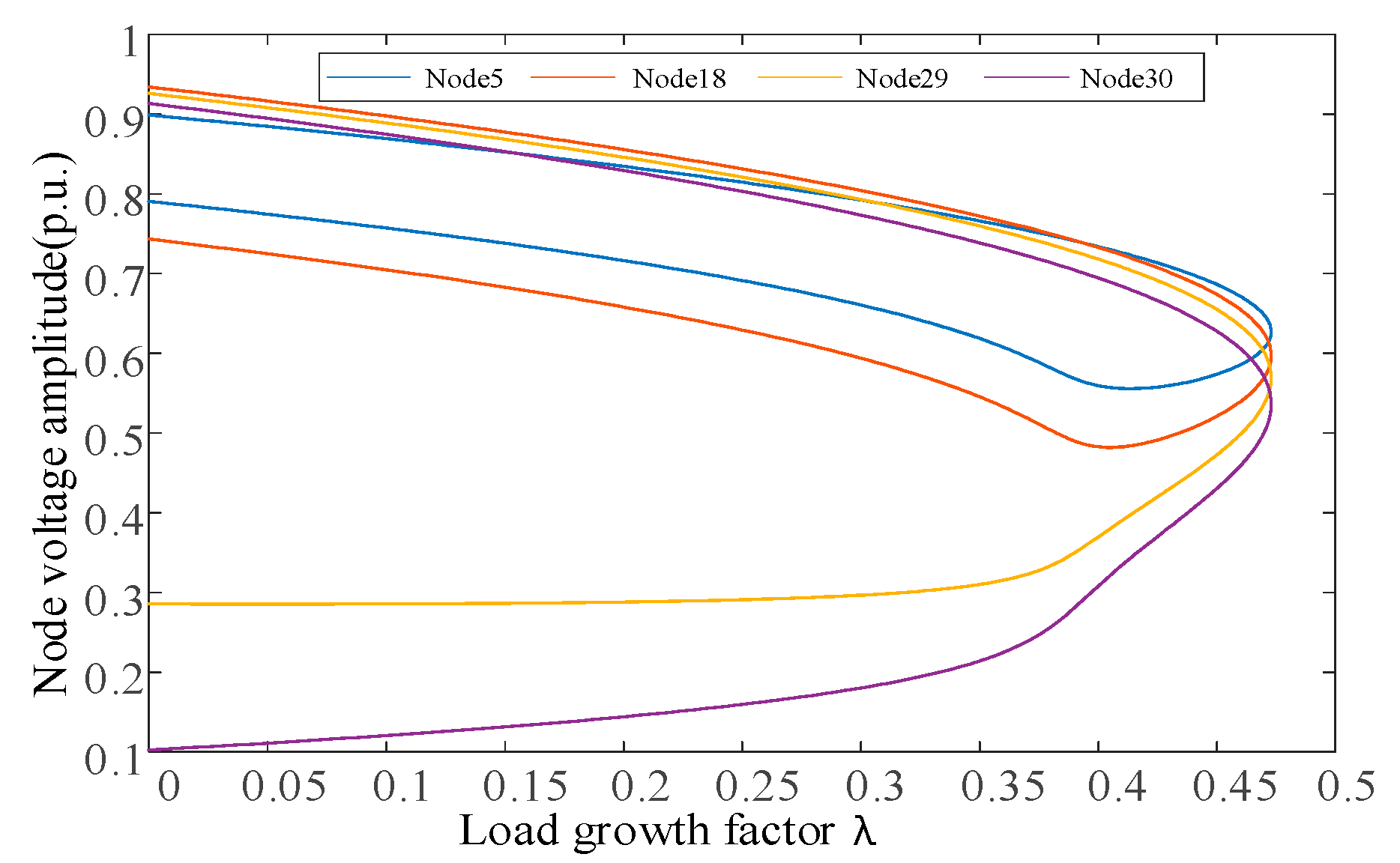
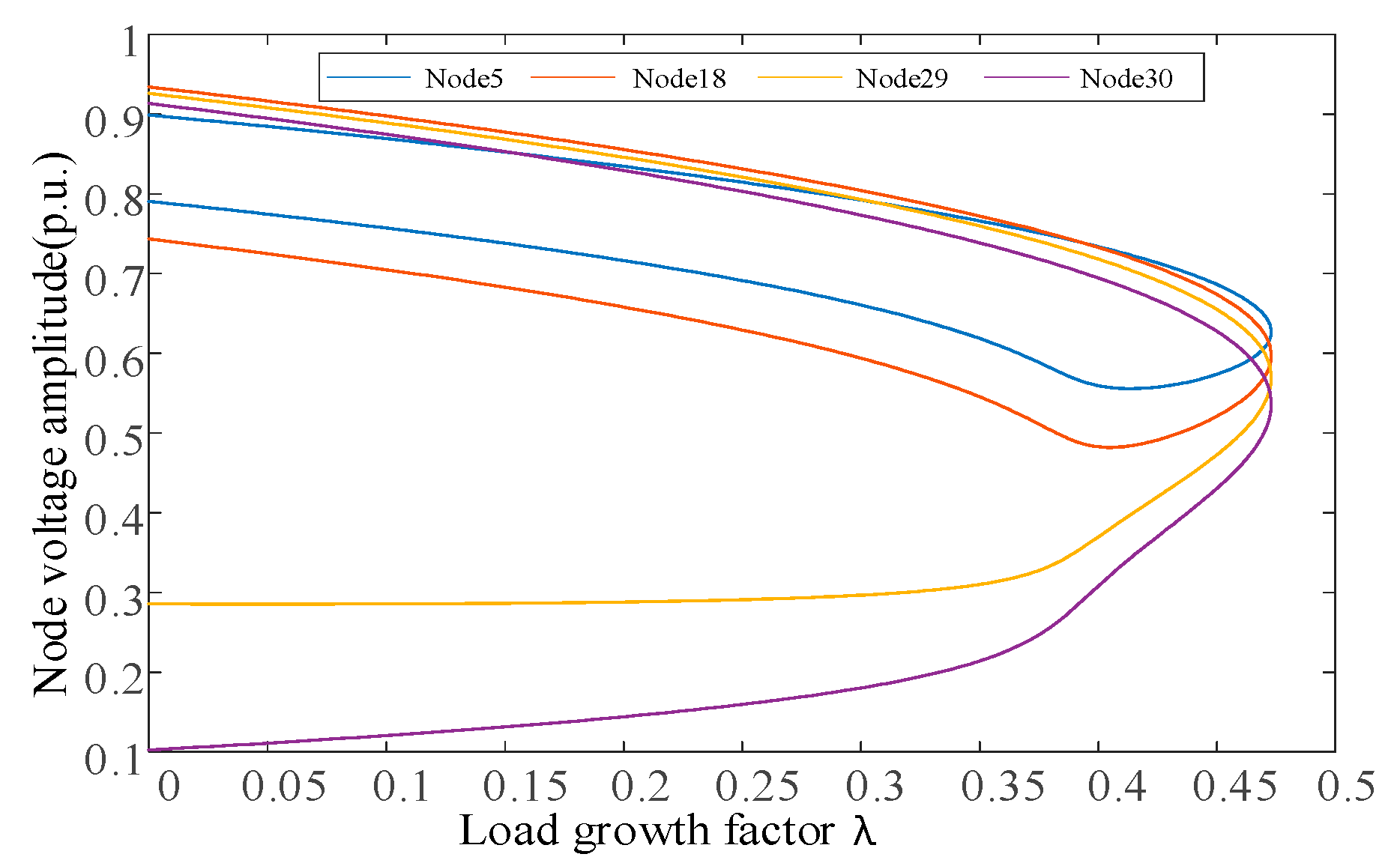
3.1. Identification of System Voltage Weak Points Based on the Continuation Power Flow Method
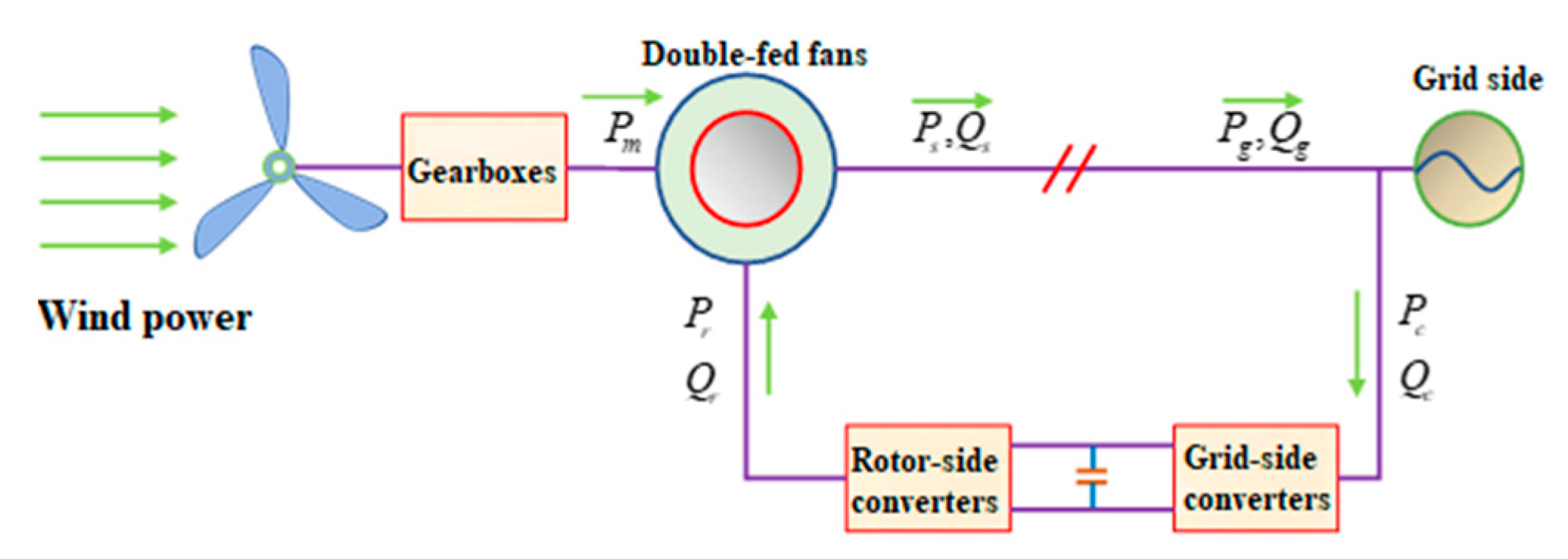
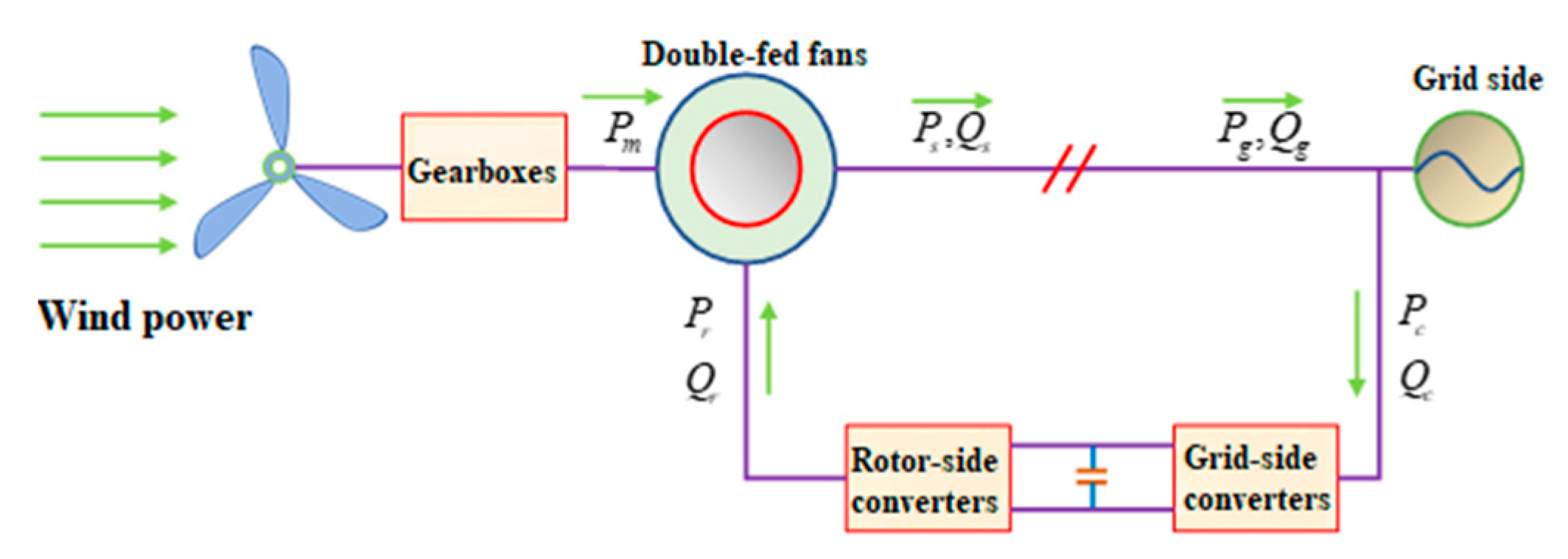
3.2. Analysis of Reactive Power Regulation Margins for Doubly Fed Wind Turbines
3.3. Formulation of Optimisation Problem
3.3.1. Objective Function
3.3.2. Flow Constraints
3.3.3. Inequality Constraints
4. Integrated Reactive Power Optimisation Model Solving Based on the Improved HHO Algorithm
4.1. Conventional HHO Algorithm
4.1.1. Harris Hawk Population Initialisation Settings
4.1.2. Prey Search Phase
4.1.3. Prey Hunting Phase
4.2. Improved HHO Algorithm
4.2.1. Corsi Variation in the Harris Hawk Population
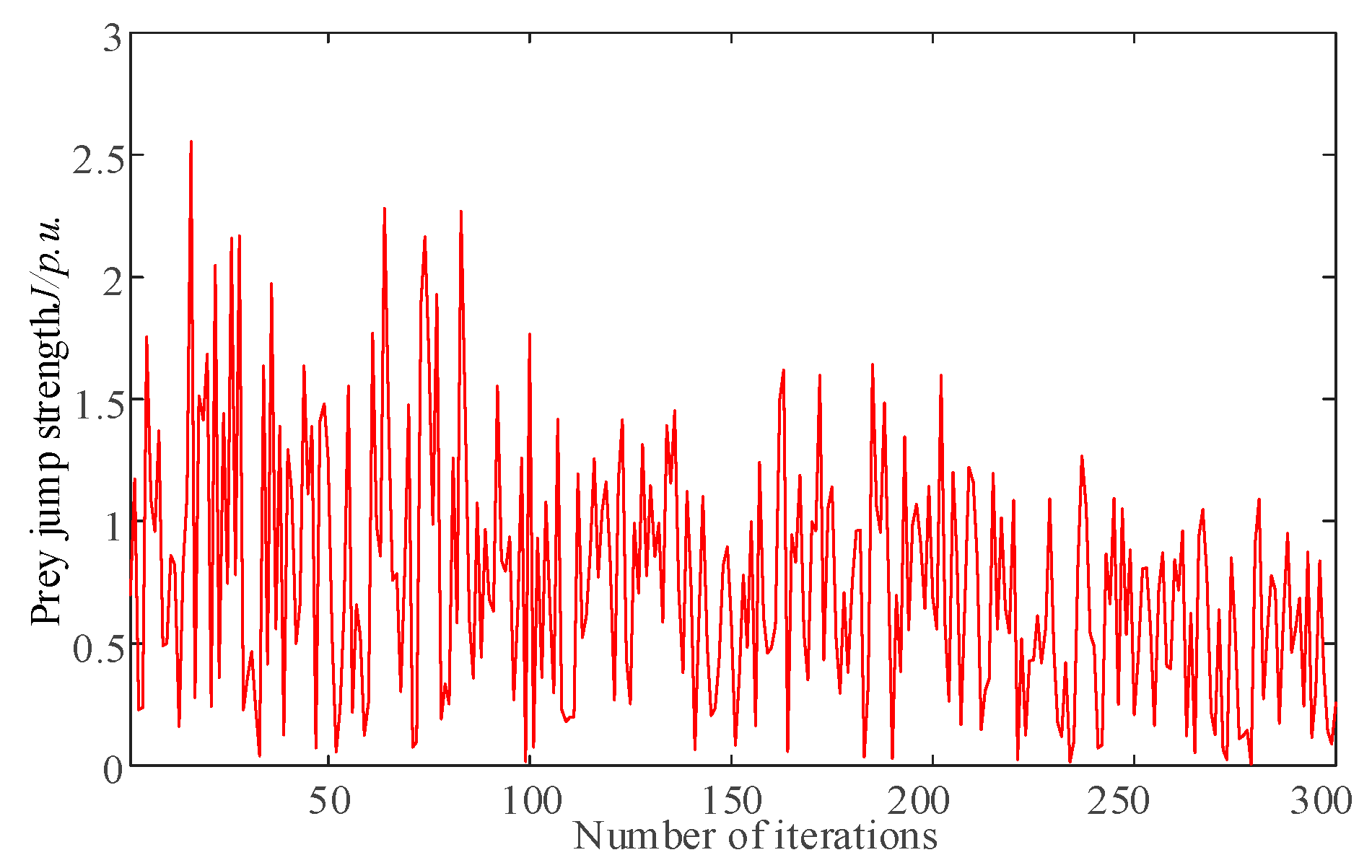
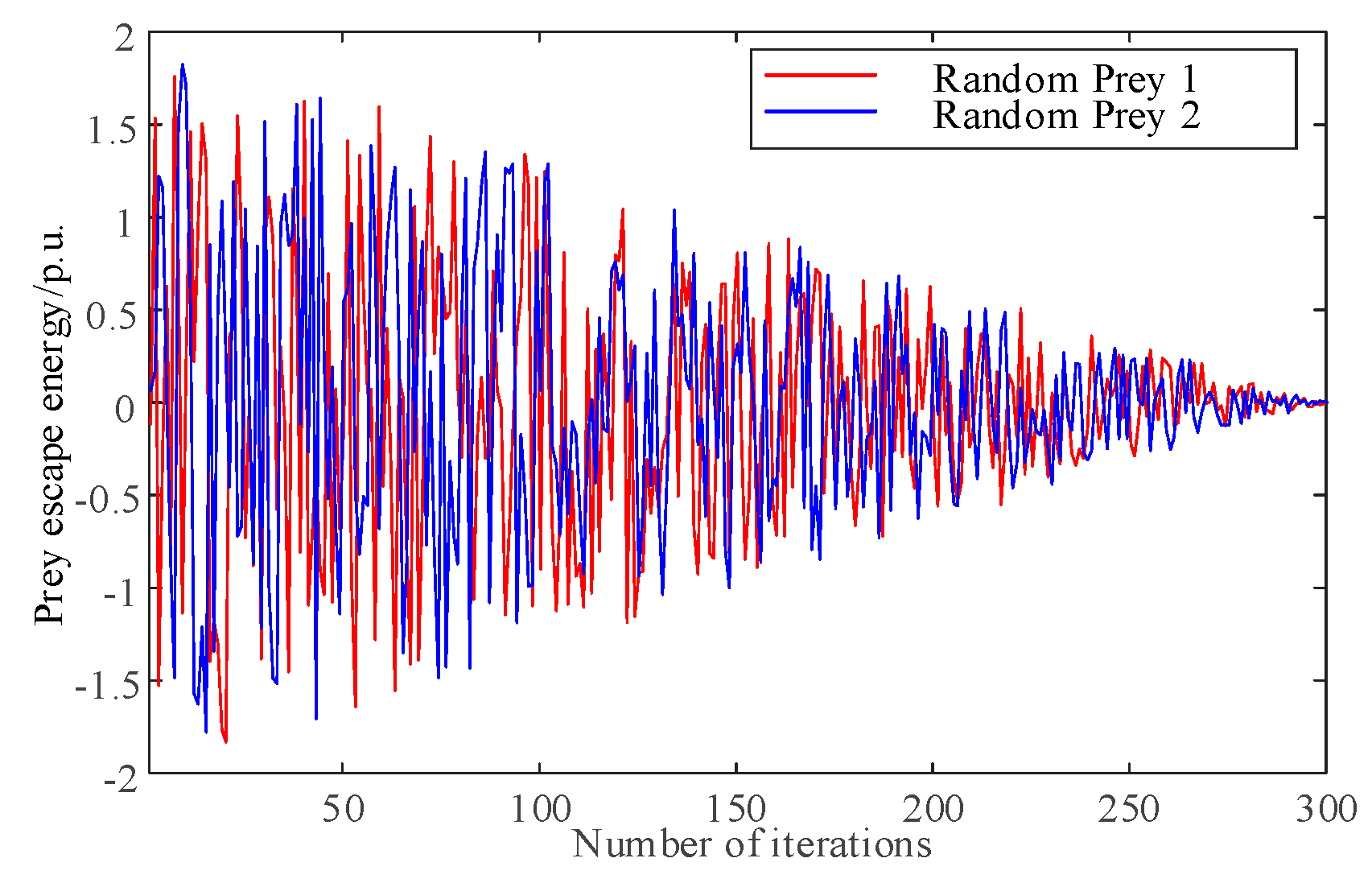
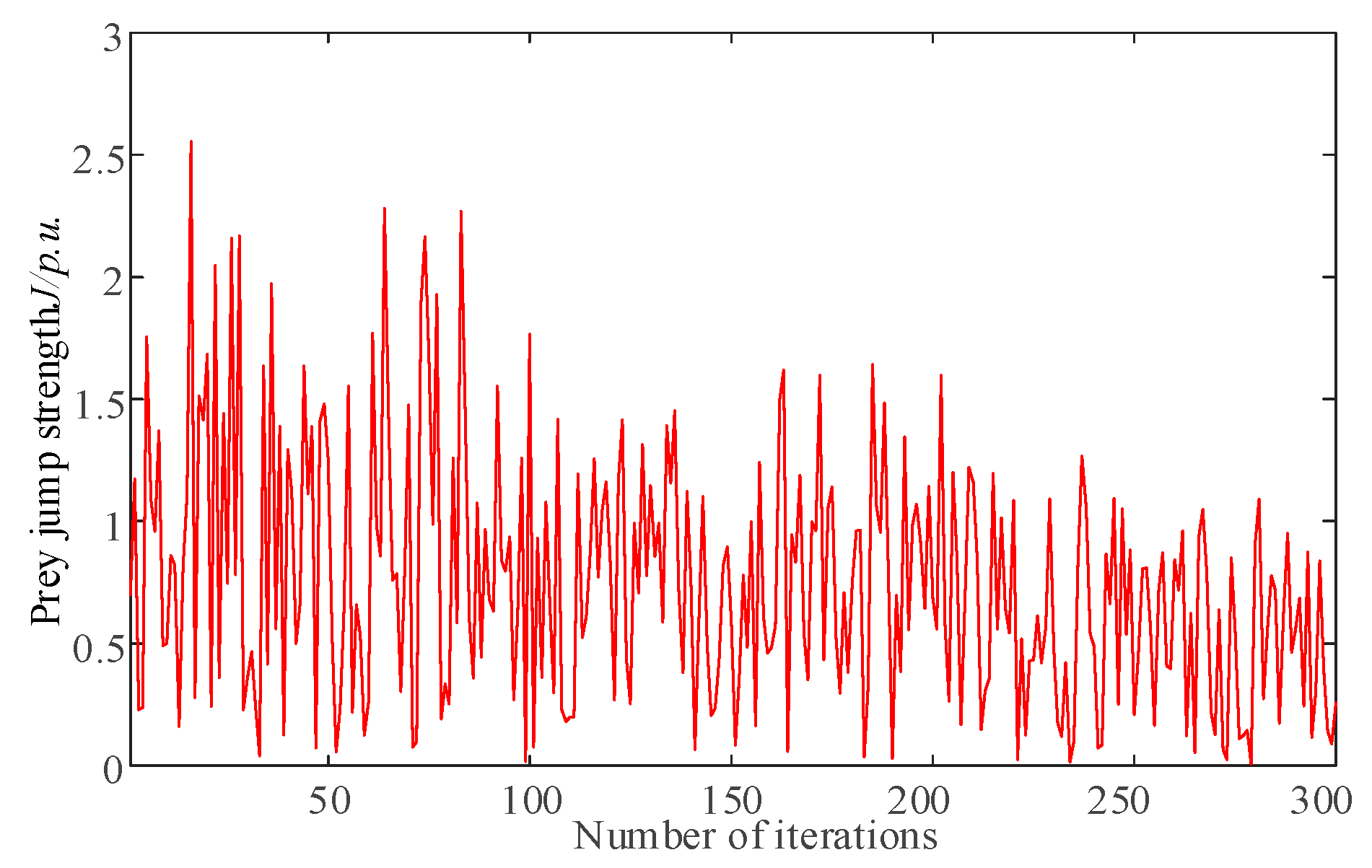
4.2.2. Prey Jump Strength Optimisation
4.2.3. Prey Position Adaptive Weighting Update
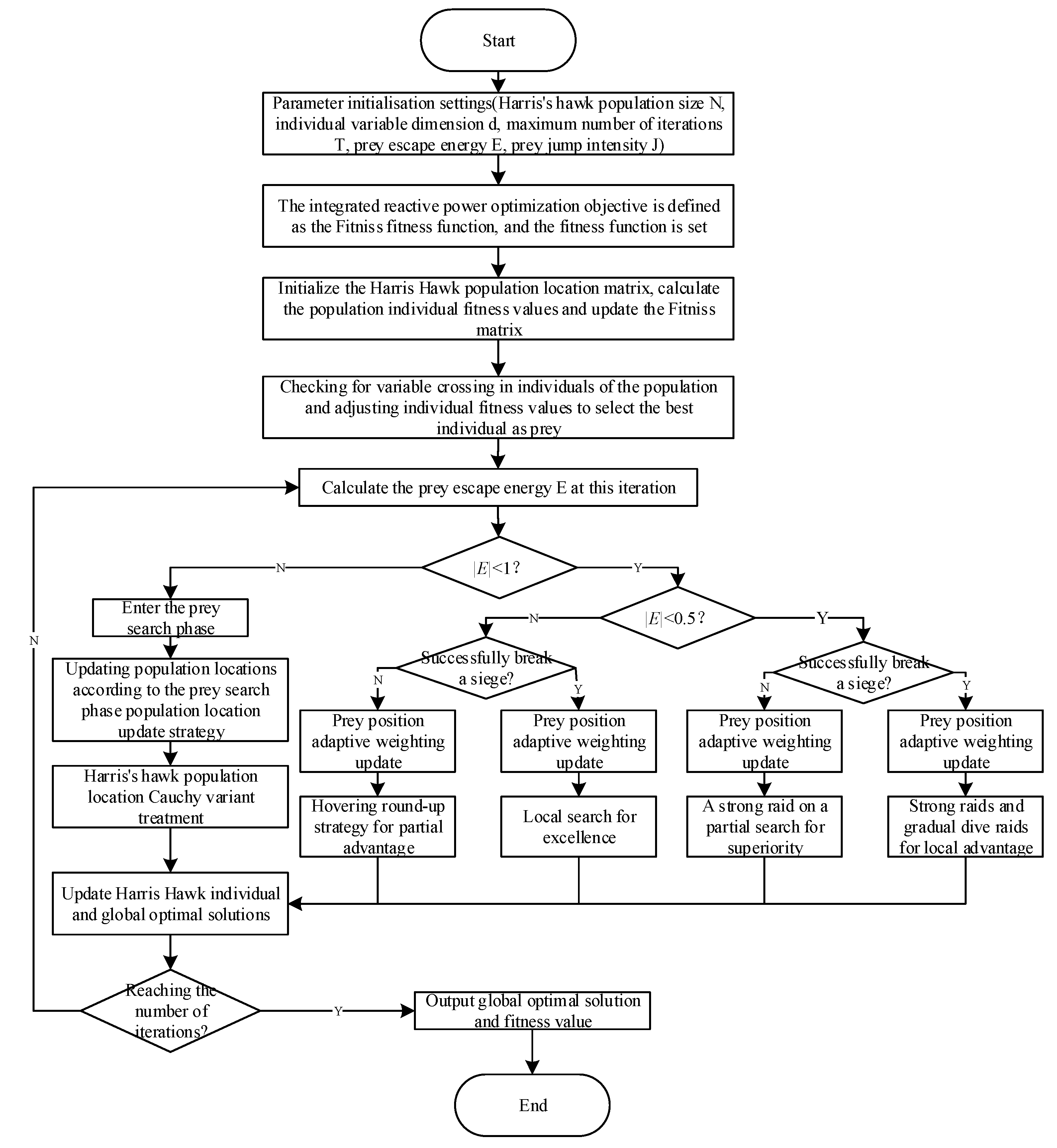
4.3. Integrated Reactive Power Strategy Solving Process Based on Improved HHO Algorithm
- (1)
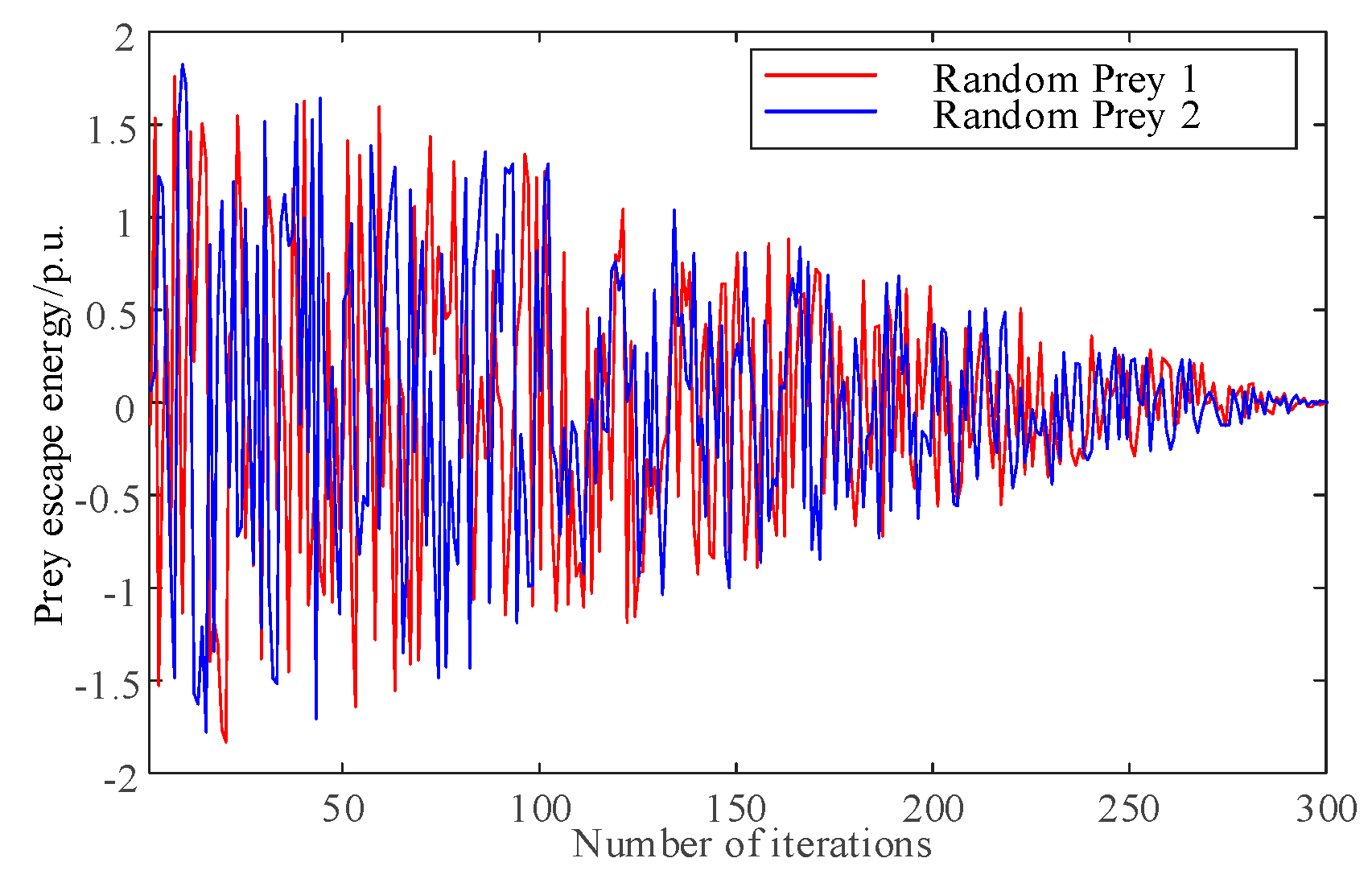
- Population initialisation and parameter setting: The population size of Harris Hawk is set as N, the dimension of the variables contained in Harris Hawk individuals is set as d, and the maximum number of iterations is set as T. We then initialize the prey escape energy E and jump strength , initialize the location of Harris Hawk population individuals, define the integrated reactive optimisation objective as the fitness function and calculate the fitness value of the initialised solution.
- (2)
- The locations of individuals in the population are tested for dimensional variable crossing limits, individual fitness values are calculated and adjusted, the optimal individual is selected as prey, and the prey escape energy at the current number of iterations is updated based on Equation (16).
- (3)
- The next location update strategy for the Harris Hawk population is decided based on the prey escape energy size, and if the absolute value of prey escape energy is greater than 1, the prey search phase is carried out, and the Harris Hawk population’s location Corsi variation is processed based on Equation (27).
- (4)
- If the absolute value of prey escape energy is less than 1, the prey roundup phase is carried out, and different location update strategies are then selected according to whether the absolute value of prey escape energy is greater than 0.5 and whether the prey breaks through the last roundup of the Harris Hawk population, allowing us to carry out local optimisation of the algorithm.
- (5)
- Adaptive weighting of the prey position is determined based on Equation (30), the jump strength of the prey for this iteration is determined based on Equation (28), and the position of the next iteration of the Harris Hawk population is updated based on the processed prey position. The fitness value of the new population individuals is calculated, and the global optimal solution is updated.
- (6)
- We determine whether the number of iterations satisfies the maximum number of iterations, and if so, we output the global optimal solution and the best fitness value for the Harris Hawk population; if not, the maximum number of iterations is transferred to step (2).
5. Results and Discussion
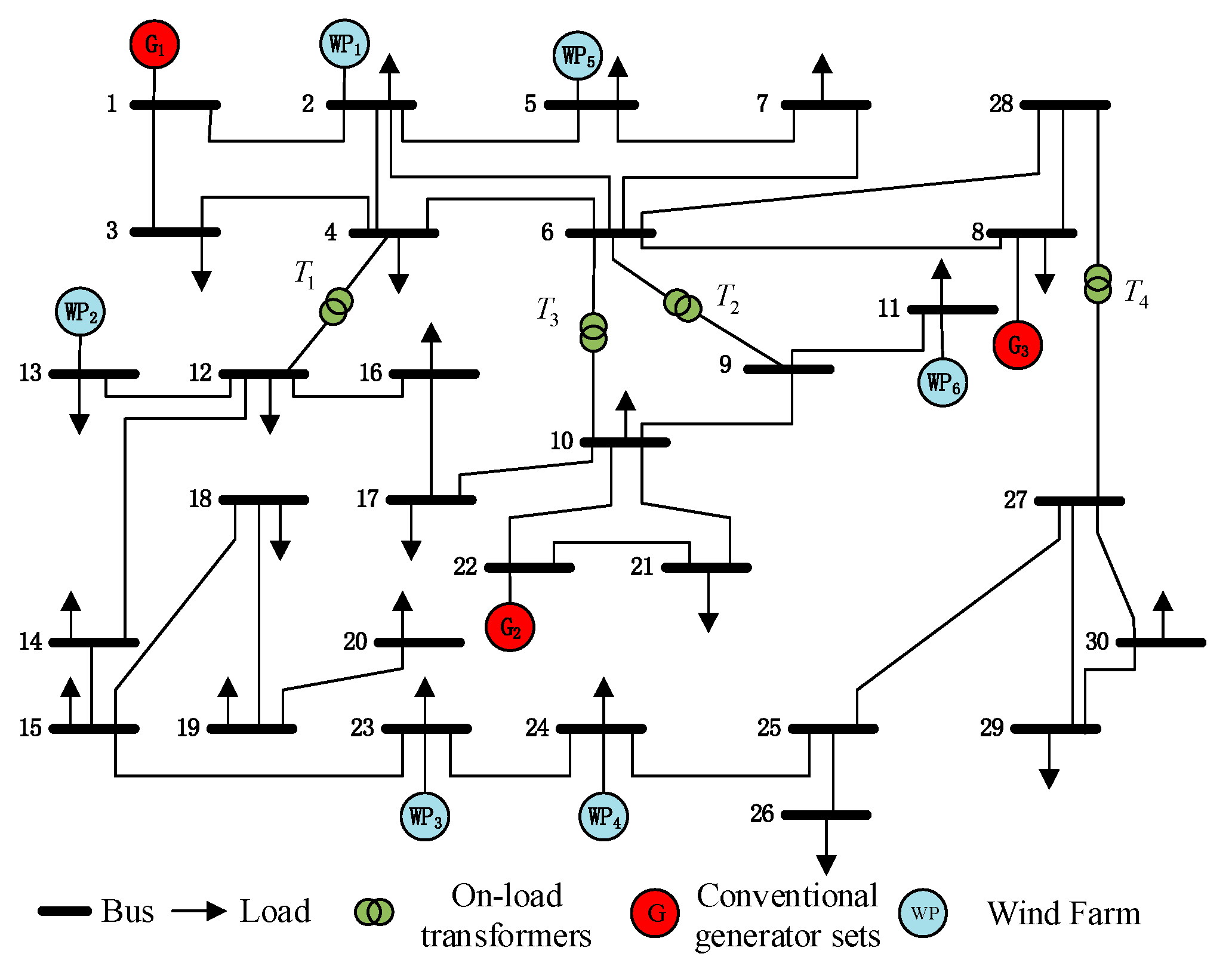
5.1. System Description
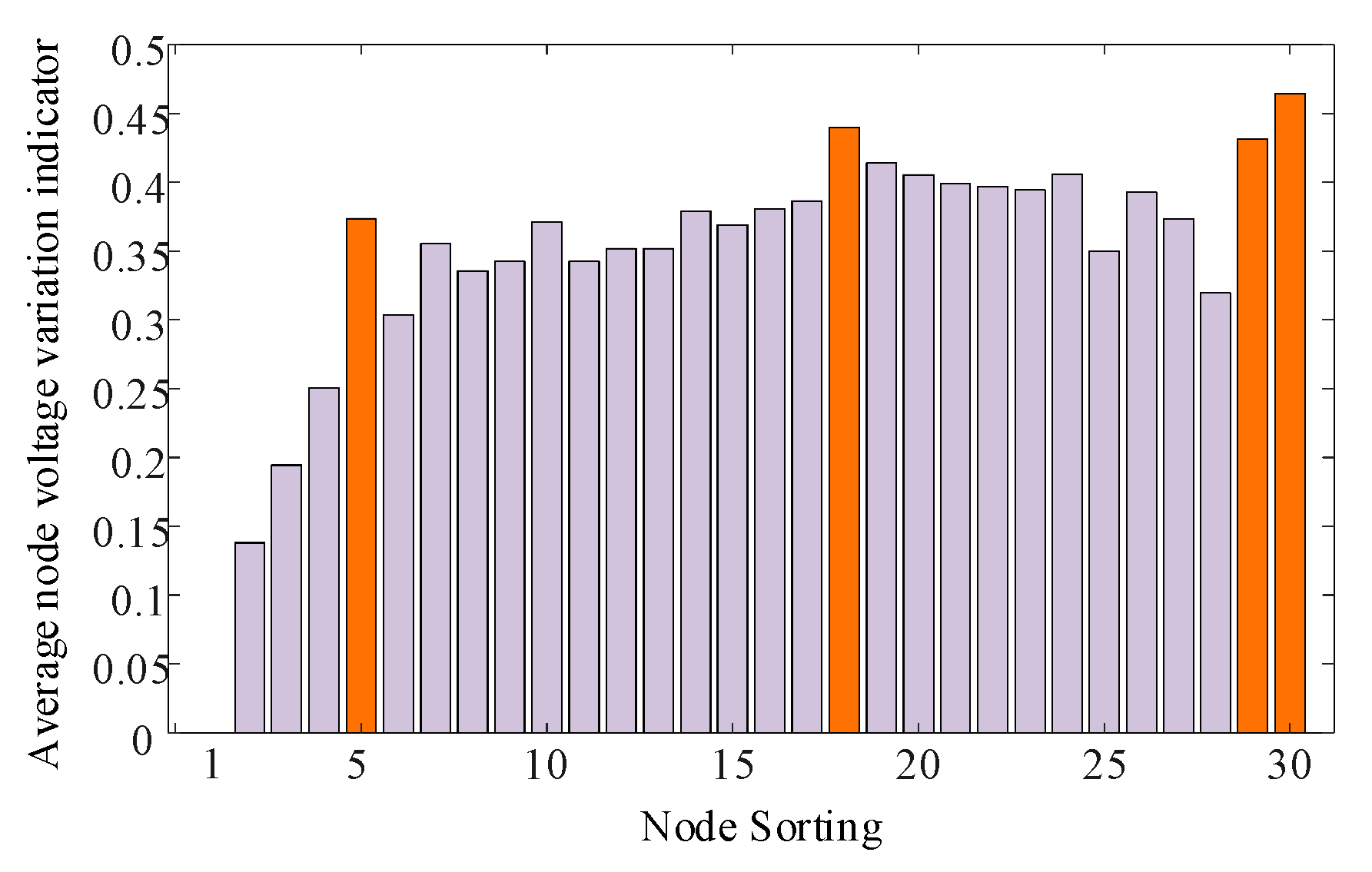
5.2. Identification of Voltage Weaknesses in New Energy Wind Farms after Connection to the System
5.3. Analysis of Wind Farm Reactive Power Regulation Capability
5.4. Integrated Reactive Power Optimisation Strategy Solution and Effect Analysis
- (1)
- The traditional HHO algorithm often falls into the local optimal loop at the beginning and middle of the iteration, although it can jump out of the current local optimal solution after several iterations, and it also reduces the efficiency of the global search.
- (2)
- The particle swarm optimisation algorithm is prone to fall into local optimal loops at the beginning and middle of the iteration, and its ability to find the optimal solution again after each iteration is poor, resulting in a higher value of the final objective function than that found using the traditional HHO algorithm.
- (3)
- Compared to the traditional HHO algorithm and particle swarm optimisation algorithm, the multi-strategy improved HHO algorithm does not excessively fall into the local optimal loop when it is applied to the reactive power optimisation, and its adaptive value decreases faster and has better convergence. The objective function value is lower after the results are stabilised, which indicates that the algorithm is superior to the comprehensive reactive power optimisation model solving calculation proposed in this paper.
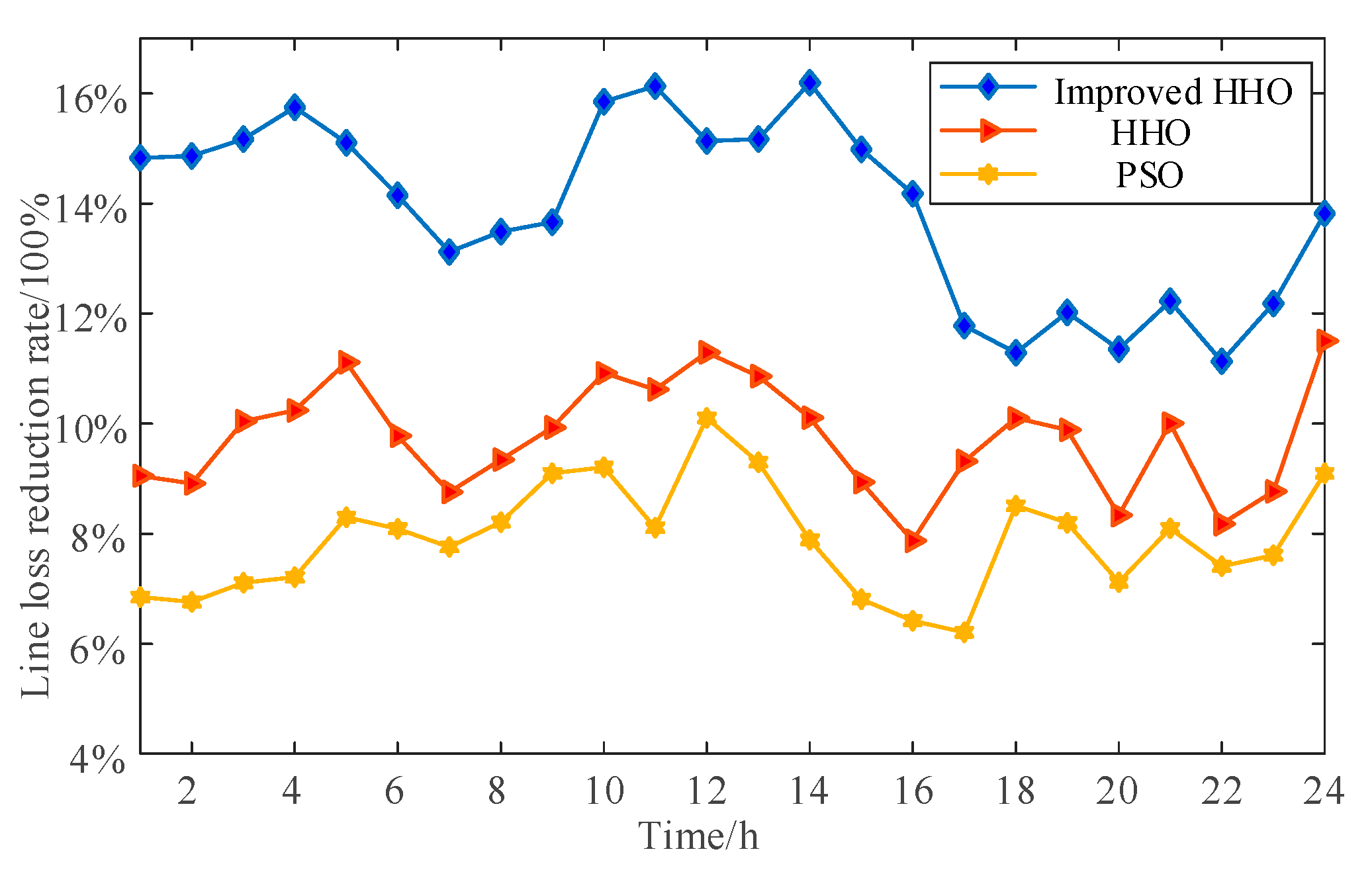
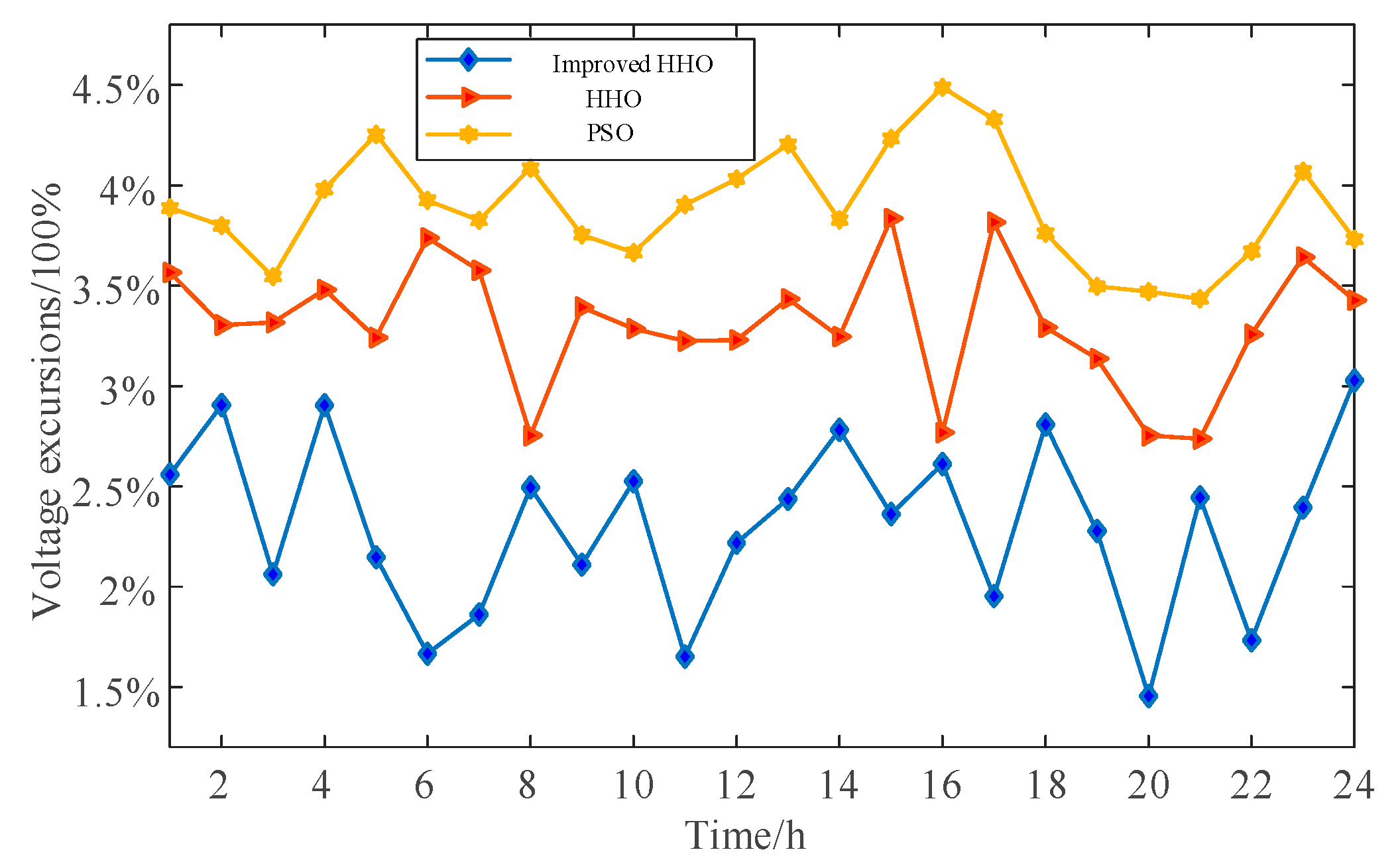
- (1)
- After applying the comprehensive reactive power optimisation strategy derived from the conventional HHO algorithm, the average system loss reduction rate is 9.75%, and the average voltage deviation is 3.311%.
- (2)
- After applying the integrated reactive power optimisation strategy derived from the particle swarm optimisation algorithm, the average system loss reduction rate is 8.16%, and the average voltage deviation is 3.962%.
- (3)
- After applying the integrated reactive power optimisation strategy derived from the multi-strategy improved HHO algorithm, the average system loss reduction rate is 13.90%, and the average voltage deviation is 2.308%.
6. Conclusions
- (1)
- The system voltage weak nodes were identified as reactive power compensation nodes based on the continuous tidal current method and the node voltage change index, which avoided the optimisation process of the access location of the reactive power compensation equipment, reduced the variable dimensions of the integrated reactive power optimisation model, and facilitated the construction and solution of the integrated reactive power optimisation model.
- (2)
- By analysing the reactive power regulation capability of wind farms, the reactive power potential of wind farms was fully explored, meaning that they could participate in the reactive power optimisation of the system, which could reduce the input of reactive power compensation equipment and improve the economy while increasing the energy utilisation of wind farms.
- (3)
- The traditional HHO algorithm was improved using the Harris Hawk population Corsi change, prey jumping strength optimisation and prey position adaptive weighting, and the improved algorithm had a performance superior to that of the traditional HHO algorithm and particle swarm optimisation algorithm when solving the comprehensive reactive power optimisation model proposed in this paper.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Shu, Y.B.; Chen, G.P.; He, J.B.; Zhang, F. Study on the framework of building a new power system with new energy as the main source. Strateg. Study CAE 2021, 23, 61–69. [Google Scholar] [CrossRef]
- Wang, X.; Wang, L.; Kang, W.; Li, T.; Zhou, H.; Hu, X.; Sun, K. Distributed Nodal Voltage Regulation Method for Low-Voltage Distribution Networks by Sharing PV System Reactive Power. Energies 2023, 16, 357. [Google Scholar] [CrossRef]
- Guo, P.; Chen, B.; Gao, Y.C.; Chen, Y.H.; Liu, L.; Peng, X.T. A generator reactive power optimisation method based on XGBOOST-PSO to improve the transient stability of the voltage at the receiving end grid. Power Syst. Prot. Control 2023, 51, 148–158. [Google Scholar]
- Xue, L.; Niu, T.; Fang, S.D.; Chen, G.H. A master-slave cooperative dynamic reactive power optimisation method taking into account the transient voltage safety of high percentage wind power. Autom. Electr. Power Syst. 2023, 1–15. [Google Scholar]
- Jiang, Z.J.; Yuan, X.; Qiu, W.H.; Huang, L.C.; He, W. Active distribution network reactive power optimisation model containing new energy and electric vehicle charging stations connected to the grid. Proc. CSU-EPSA 2023, 1–11. [Google Scholar]
- Lu, J.; Chang, J.X.; Zhang, Y.G.; E, S.P.; Zeng, C.H. Two-stage reactive power chance-constrained optimization method for an active distribution network considering DG uncertainties. Power Syst. Prot. Control. 2021, 49, 28–35. [Google Scholar]
- Xiao, H.; Pei, W.; Dong, Z.M.; Pu, T.J.; Chen, N.S.; Kong, L. Reactive power optimization of distribution network with distributed generation using metamodel-based global optimization method. Proc. CSEE 2018, 38, 1–13. [Google Scholar]
- Lin, S.H.; Wu, J.K.; Mo, C.; Wang, Z.Q.; Guo, Q.Y. Dynamic partition and optimization method for reactive power of distribution networks with distributed generation based on second-order cone programming. Power Syst. Technol. 2018, 42, 238–246. [Google Scholar]
- Yao, L.N.; Li, Q.H.; Yang, J.X.; Zhang, Y.J. Comprehensive reactive power optimization of power distribution and consumption system with support of electric vehicle charging and discharging. Autom. Electr. Power Syst. 2021, 46, 39–47. [Google Scholar]
- Ruan, H.B.; Gao, H.J.; Liu, J.Y.; Huang, Z. A distributionally robust reactive power optimization model for active distribution network considering reactive power support of DG and switch reconfiguration. Proc. CSEE 2019, 39, 685–695. [Google Scholar]
- Wu, G.; Wang, W.; Zhang, Y.; Yi, Y.; Zeng, S. Time decoupled dynamic extended reactive power optimization in incremental distribution network with photovoltaic-energy storage hybrid system. Power Syst. Prot. Control 2019, 47, 173–179. [Google Scholar]
- Chen, Q.; Wang, W.Q.; Wang, H.Y.; Wu, J.H. Research on dynamic reactive power compensation optimization strategy for distribution networks with distributed generation. Acta Energiae Solaris Sin. 2023, 44, 525–535. [Google Scholar]
- Wang, Z.Q.; Chen, J.F.; Zhang, G.F.; Yang, Q.; Dai, Y.H. Optimal power flow calculation with moth-flame optimization algorithm. Power Syst. Technol. 2017, 41, 3641–3647. [Google Scholar]
- Su, X.J.; Peng, H.; Mi, Y.; Fu, Y. Real-time optimization of voltage and reactive power in low- and medium-voltage unbalanced distribution networks based on linear programming. Power Syst. Technol. 2022, 1–14. [Google Scholar]
- Zhang, J.; Zheng, Y.Y.; Liu, S.C.; Ma, Y.F.; Yan, W. Dynamic reactive power optimization algorithm for regional power grids based on decoupled interior point method and mixed integer programming method. Electr. Power 2023, 56, 112–118. [Google Scholar]
- Zhou, B.X.; Yang, J.J.; Liu, Z.F.; Liu, S.C. Two-stage dynamic reactive power optimization for power systems based on improved state transfer algorithm. Power Capacit. React. Power Compens. 2021, 42, 22–30. [Google Scholar]
- Sun, T.; Zou, P.; Yang, Z.F.; Zhong, H.W.; Dai, G.H. A multi-stage solution method for dynamic reactive power optimization. Power Syst. Technol. 2016, 40, 1804–1810. [Google Scholar]
- Xiao, J.H.; Li, C.L.; Huang, X.Q.; Chen, D.P.; Ou, Z. Research on reactive power optimization of distribution networks containing wind power based on particle swarm algorithm. Electr. Eng. 2022, 18, 133–134+139. [Google Scholar]
- Xia, Z.L.; Lu, L.S.; Wu, Q.F.; Li, C.; Chen, Y. Application of improved grey wolf algorithm in reactive power optimisation of distribution network containing wind power. Smart Power 2023, 51, 63–70. [Google Scholar]
- Chen, Q.; Wang, W.Q.; Wang, H.Y. Strategy for optimal operation of a two-tier distribution grid containing distributed energy sources. Acta Energiae Solaris Sin. 2022, 43, 507–517. [Google Scholar]
- Wang, G.; Wu, X.; Li, L.; Zhang, M.Y.; Li, X.Z.; Chen, K.; Zhang, J.X. Optimization method of reactive power and harmonics under different output states of PV multifunctional grid-connected inverters. Electr. Power Autom. Equip. 2023, 1–12. [Google Scholar]
- Chen, L. Research on Several Issues of Distributed Generation Connecting to Power System; Zhejiang University: Hangzhou, China, 2007. [Google Scholar]
- Jin, J.L.; Li, X.T.; Liang, H.; Zhang, Y.L.; Peng, S.T.; Zuo, B.F.; Xu, J.; Zhan, J.Q. Calculation method of voltage stability limit based on improved continuous power flow method. Smart Power 2021, 49, 46–50. [Google Scholar]
- Cao, J.; Dang, Y. Fast calculation method of static voltage stability limit point of wind power connection system. Electr. Autom. 2020, 42, 13–16. [Google Scholar]
- Yang, L.; Wu, C.; Huang, W.; Guo, C.; Xiang, C. Multi-objective reactive power optimisation algorithm for new energy grid with high proportion of wind and solar energy. Electr. Power Constr. 2020, 41, 100–109. [Google Scholar]
- Liu, H.Z.; Li, Y.G.; Wang, Y.Y.; Zhang, X.T.; Cao, N.J. Impact of reactive voltage optimisation on new energy consumption. Transac. China Electr. Society 2019, 34, 646–653. [Google Scholar]
- Wang, Y.X.; Dai, C.B.; Yang, Z.C.; Xu, G.Y.; Bi, T.S. Wind farm reactive voltage control strategy considering wind turbine reactive potential. Power Syst. Prot. Control 2022, 50, 83–90. [Google Scholar]
- Heidari, A.A.; Mirjalili, S.; Faris, H.; Aljarah, I.; Mafarja, M.; Chen, H. Harris hawks optimization: Algorithm and applications. Future Gener. Comput. Syst. 2019, 97, 849–872. [Google Scholar] [CrossRef]
- Jingwei, T.; Abdul, R. A new quadratic binary harris hawk optimization for feature selection. Electronics 2019, 8, 1130–1156. [Google Scholar]
- Jia, H.M.; Lang, C.B.; Oliva, D.; Song, W.L.; Peng, X.X. Dynamic harris hawks optimization with mutation mechanism for satellite image segmentation. Remote Sens. 2019, 11, 1421. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Time/h | /(m/s) | /(MW) | /(MW) | /(MW) | /(Mvar) |
|---|---|---|---|---|---|
| 1:00 | 8.728 | 5.334 | 0.093 | 5.428 | [−6.952, 8.378] |
| 2:00 | 15.792 | 12.021 | 0.210 | 12.232 | [−9.595, 11.157] |
| 3:00 | 3.447 | 0.994 | 0.017 | 1.011 | [−5.251, 6.577] |
| 4:00 | 8.209 | 4.993 | 0.087 | 5.080 | [−6.819, 8.237] |
| 5:00 | 8.883 | 5.433 | 0.095 | 5.528 | [−6.991, 8.419] |
| 6:00 | 14.477 | 9.495 | 0.166 | 9.661 | [−8.612, 10.107] |
| 7:00 | 12.508 | 7.803 | 0.137 | 7.940 | [−7.931, 9.401] |
| 8:00 | 5.077 | 2.626 | 0.046 | 2.672 | [−5.897, 7.259] |
| 9:00 | 15.957 | 13.524 | 0.237 | 13.761 | [−10.163, 11.783] |
| 10:00 | 8.867 | 5.420 | 0.095 | 5.515 | [−6.987, 8.415] |
| 11:00 | 9.022 | 5.520 | 0.097 | 5.617 | [−7.027, 8.456] |
| 12:00 | 15.910 | 12.803 | 0.224 | 13.027 | [−9.891, 11.482] |
| 13:00 | 15.939 | 13.163 | 0.230 | 13.394 | [−10.027, 11.633] |
| 14:00 | 15.941 | 13.203 | 0.231 | 13.434 | [−10.042, 11.650] |
| 15:00 | 4.619 | 2.205 | 0.039 | 2.244 | [−5.731, 7.085] |
| 16:00 | 5.785 | 3.227 | 0.056 | 3.283 | [−6.131, 7.508] |
| 17:00 | 6.448 | 3.748 | 0.066 | 3.813 | [−6.334, 7.723] |
| 18:00 | 16.004 | 16.87 | 0.295 | 17.165 | [−11.486, 13.169] |
| 19:00 | 7.704 | 4.649 | 0.081 | 4.730 | [−6.686, 8.096] |
| 20:00 | 14.459 | 9.477 | 0.166 | 9.643 | [−8.604, 10.099] |
| 21:00 | 9.712 | 5.961 | 0.104 | 6.065 | [−7.200, 8.639] |
| 22:00 | 6.689 | 3.925 | 0.069 | 3.994 | [−6.404, 7.798] |
| 23:00 | 14.716 | 9.777 | 0.171 | 9.948 | [−8.723, 10.224] |
| 24:00 | 8.044 | 4.885 | 0.085 | 4.970 | [−6.776, 8.192] |
| Time/h | Line Loss/MW | Loss Reduction Rate | |||||
|---|---|---|---|---|---|---|---|
| Unoptimised | PSO | HHO | Improved HHO | PSO | HHO | Improved HHO | |
| 1:00 | 19.076 | 17.769 | 17.349 | 16.247 | 6.85% | 9.05% | 14.83% |
| 2:00 | 19.159 | 17.864 | 17.452 | 16.312 | 6.76% | 8.91% | 14.86% |
| 3:00 | 19.379 | 18.001 | 17.433 | 16.439 | 7.11% | 10.04% | 15.17% |
| 4:00 | 19.206 | 17.821 | 17.239 | 16.181 | 7.21% | 10.24% | 15.75% |
| 5:00 | 19.033 | 17.453 | 16.918 | 16.158 | 8.30% | 11.11% | 15.10% |
| 6:00 | 19.199 | 17.646 | 17.322 | 16.483 | 8.09% | 9.78% | 14.15% |
| 7:00 | 19.067 | 17.587 | 17.397 | 16.566 | 7.76% | 8.76% | 13.12% |
| 8:00 | 18.827 | 17.281 | 17.068 | 16.288 | 8.21% | 9.34% | 13.48% |
| 9:00 | 18.890 | 17.171 | 17.014 | 16.309 | 9.10% | 9.93% | 13.66% |
| 10:00 | 18.936 | 17.192 | 16.868 | 15.934 | 9.21% | 10.92% | 15.85% |
| 11:00 | 19.023 | 17.480 | 17.003 | 15.954 | 8.11% | 10.62% | 16.13% |
| 12:00 | 19.093 | 17.165 | 16.936 | 16.204 | 10.10% | 11.30% | 15.13% |
| 13:00 | 19.131 | 17.352 | 17.053 | 16.229 | 9.30% | 10.86% | 15.17% |
| 14:00 | 18.956 | 17.460 | 17.040 | 15.887 | 7.89% | 10.11% | 16.19% |
| 15:00 | 19.682 | 18.342 | 17.923 | 16.733 | 6.81% | 8.94% | 14.98% |
| 16:00 | 18.638 | 17.441 | 17.171 | 15.996 | 6.42% | 7.87% | 14.18% |
| 17:00 | 19.133 | 17.945 | 17.350 | 16.879 | 6.21% | 9.32% | 11.78% |
| 18:00 | 18.844 | 17.240 | 16.941 | 16.717 | 8.51% | 10.10% | 11.29% |
| 19:00 | 19.075 | 17.511 | 17.189 | 16.782 | 8.20% | 9.89% | 12.02% |
| 20:00 | 18.825 | 17.485 | 17.256 | 16.688 | 7.12% | 8.34% | 11.35% |
| 21:00 | 18.578 | 17.073 | 16.720 | 16.307 | 8.10% | 10.00% | 12.23% |
| 22:00 | 19.098 | 17.683 | 17.536 | 16.972 | 7.41% | 8.18% | 11.13% |
| 23:00 | 18.956 | 17.513 | 17.294 | 16.647 | 7.61% | 8.77% | 12.18% |
| 24:00 | 19.049 | 17.316 | 16.858 | 16.417 | 9.10% | 11.50% | 13.82% |
| Time/h | Voltage Excursions (%) | Time/h | Voltage Excursions (%) | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Unoptimised | PSO | HHO | Improved HHO | Unoptimised | PSO | HHO | Improved HHO | ||
| 1:00 | 6.01 | 3.89 | 3.57 | 2.56 | 13:00 | 6.06 | 4.21 | 3.44 | 2.437 |
| 2:00 | 6.08 | 3.80 | 3.30 | 2.91 | 14:00 | 6.10 | 3.83 | 3.25 | 2.782 |
| 3:00 | 6.03 | 3.55 | 3.32 | 2.06 | 15:00 | 6.02 | 4.23 | 3.84 | 2.362 |
| 4:00 | 6.09 | 3.98 | 3.48 | 2.91 | 16:00 | 6.06 | 4.49 | 2.77 | 2.611 |
| 5:00 | 6.03 | 4.26 | 3.24 | 2.15 | 17:00 | 6.07 | 4.33 | 3.82 | 1.953 |
| 6:00 | 6.05 | 3.93 | 3.74 | 1.67 | 18:00 | 6.04 | 3.76 | 3.29 | 2.807 |
| 7:00 | 6.08 | 3.83 | 3.58 | 1.86 | 19:00 | 6.01 | 3.49 | 3.14 | 2.277 |
| 8:00 | 6.06 | 4.07 | 2.75 | 2.49 | 20:00 | 6.06 | 3.47 | 2.75 | 1.455 |
| 9:00 | 6.09 | 3.75 | 3.39 | 2.11 | 21:00 | 6.03 | 3.44 | 2.74 | 2.444 |
| 10:00 | 6.03 | 3.67 | 3.29 | 2.53 | 22:00 | 5.99 | 3.67 | 3.26 | 1.733 |
| 11:00 | 6.05 | 3.90 | 3.22 | 1.65 | 23:00 | 6.04 | 4.07 | 3.64 | 2.394 |
| 12:00 | 6.08 | 4.03 | 3.23 | 2.22 | 24:00 | 6.17 | 3.73 | 3.43 | 3.027 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, J.; Zhang, M.; Zhao, B.; Du, X.; Zhang, H.; Shang, L.; Wang, C. Integrated Reactive Power Optimisation for Power Grids Containing Large-Scale Wind Power Based on Improved HHO Algorithm. Sustainability 2023, 15, 12962. https://doi.org/10.3390/su151712962
Zhao J, Zhang M, Zhao B, Du X, Zhang H, Shang L, Wang C. Integrated Reactive Power Optimisation for Power Grids Containing Large-Scale Wind Power Based on Improved HHO Algorithm. Sustainability. 2023; 15(17):12962. https://doi.org/10.3390/su151712962
Chicago/Turabian StyleZhao, Jie, Mingcheng Zhang, Biao Zhao, Xiao Du, Huaixun Zhang, Lei Shang, and Chenhao Wang. 2023. "Integrated Reactive Power Optimisation for Power Grids Containing Large-Scale Wind Power Based on Improved HHO Algorithm" Sustainability 15, no. 17: 12962. https://doi.org/10.3390/su151712962
APA StyleZhao, J., Zhang, M., Zhao, B., Du, X., Zhang, H., Shang, L., & Wang, C. (2023). Integrated Reactive Power Optimisation for Power Grids Containing Large-Scale Wind Power Based on Improved HHO Algorithm. Sustainability, 15(17), 12962. https://doi.org/10.3390/su151712962