2.2.1. Description of the COAWST Model
The COAWST 3.7 model system is a state-of-the-art, community-based, open-source modeling framework that allows for the simulation of complex physical processes in the coastal ocean and atmosphere, as well as the transport of sediments and the generation of waves [
37]. The COAWST model system is a powerful tool for studying the impacts of climate change, coastal hazards, and oceanographic processes in coastal regions and has been widely used in research and operational applications [
38].
The COAWST model system is based on the coupling of several models, including the Weather Research and Forecasting (WRF) atmospheric model, the Regional Ocean Modeling System (ROMS), the Simulating Waves Nearshore (SWAN) model, and the Community Sediment Transport Model (CSTM) [
39]. The COAWST model system allows for two-way coupling between the atmosphere and the ocean, as well as one-way coupling between the ocean and waves and between the waves and sediment transport. The system is highly configurable, allowing users to choose which models to use, the spatial and temporal resolutions, and the boundary conditions, among other options.
The COAWST model system has been used in a variety of applications, including studies to predict typhoon-related coastal flooding and erosion [
40], the impact of storms on coastal communities [
41], and the effects of climate change on coastal ecosystems [
42]. The system has also been used for operational forecastings, such as predicting storm surges and flooding during hurricanes and typhoons [
43,
44,
45,
46,
47]. For example, the author of [
48] applied a high-resolution COAWST model to simulate storm surges and inundation in the northern Gulf of Mexico during Hurricane Laura. The author of [
49] used a COAWST model to simulate the storm surges and inundation in the East China Sea during Typhoon In-Fa. The results showed that the COAWST model accurately simulated the storm surges and inundation along the coast, and the model could be used for early warning systems and decision-making during typhoon events.
Previous studies have demonstrated that the COAWST model system can accurately simulate storm surges and inundations along the coast and provide valuable information for early warning systems and decision-making during typhoon events. This study applied the COAWST model system to simulate atmospheric and rainfall factors for evaluating the results of the SW wave propagation model for Typhoon Noru.
2.2.2. Description of the 1D and 2D Models
- (a)
One-Dimensional Hydraulic MIKE 11 Model
MIKE 11 HD by DHI, Denmark (2014) is applied for the dynamic description of waves. It solves the vertically integrated equations of the conservation of continuity and momentum (the Saint Venant equations) [
50] based on the following assumptions.
The derivation of the equations of continuity and momentum, as used by MIKE 11, are as follows:
where
Q is the discharge,
A is the area of the flow,
q is the lateral inflow,
h is the stage above the datum,
C is the Chezy resistance coefficient,
R is the hydraulic or resistance radius, and
α is the distribution coefficient of the momentum.
The solution of the equations of continuity and momentum was based on the implicit finite difference scheme developed by [
50]. The scheme was structured to be independent of the specific wave description (i.e., kinematic, diffusive, or dynamic).
- (b)
MIKE 21 SW Wave Propagation Model
The dynamics of the gravity waves are described by the transport equation for the density of the waves’ action. For small-scale applications, the basic transport is usually formulated in Cartesian coordinates, while spherical polar coordinates are used for large-scale applications. The density spectrum of waves’ action varies in time and space and is a function of two parameters of the wave phase [
51]. The two parameters of the wave phase are the vector of the wave number
with a magnitude of
k and the direction of
θ. Alternatively, the parameters of the wave phase can be the waves’ direction,
θ, and either the relative (intrinsic) angular frequency,
σ = 2πƒ
a, or the absolute angular frequency,
ω = 2πƒ
a. In the present model, a formula for the waves’ direction,
θ, and the relative angular frequency,
σ, was chosen [
52]. The density of action,
N(
σ,
θ), is related to the energy density
E(
σ,
θ) by Equation (3):
For the propagation of waves over slowly varying depths and currents, the relationship between the relative angular frequency (as observed in a frame of reference moving with the current’s velocity) and the absolute angular frequency, ω, (as observed in a fixed frame) is given by the following linear dispersion relationship:
where
g is the acceleration of gravity,
d is the depth of the water depth, and
is the current’s velocity vector. The magnitude of the group velocity,
cg, of the wave’s energy relative to the current is given by Equation (5):
The phase velocity,
c, of the wave relative to the current, is given by Equation (6):
The frequency spectrum is limited to the range between a minimum frequency,
σmin, and the maximum frequency,
σmax. The frequency spectrum was split into a deterministic prognostic part for frequencies lower than the cut-off frequency and an analytical, diagnostic part for frequencies higher than the cut-off frequency. A dynamic cut-off frequency depending on the local wind speed and the mean frequency was used, as in the WAM Cycle 4 model [
53]. The deterministic part of the spectrum is determined by solving the transport equation for the density of wave action using numerical methods. Above the cut-off frequency limit of the prognostic region, a parametric tail was applied.
where
m is a constant, and the present model applied is
m = 5. The maximum prognostic frequency was determined as
where
is the maximum discrete frequency used in the deterministic wave model,
is the mean relative frequency and
is the Pierson–Moskowitz peak frequency for fully developed waves (U
10 is the wind speed 10 m above the mean sea level). The diagnostic tail was used in the calculation of the non-linear transfer and the calculation of the integral parameters used in the source functions. Below the minimum frequency, the spectral densities were assumed to be zero [
52].
- (c)
Two-Dimensional Hydraulic MIKE 21 Model
The MIKE 21 FM (2014) module is a two-dimensional model for calculating the flow in a vertically homogeneous fluid layer [
54]. The flow’s modulus is solved by the finite element grid method. This module is based on the solution of the Reynolds-averaged Navier–Stokes equations for 2- or 3-dimensional incompressible fluids combined with the Boussinesq hypothesis and the hydrostatic pressure hypothesis. The two-dimensional elements can be triangular or quadrangular. Through the integration of the horizontal momentum equations and the continuity equation over the depth
h =
η +
d, the following two-dimensional equations for shallow water can be obtained:
where
t is time;
x,
y, and
z indicate the direction in Cartesian coordinates;
η is the surface elevation;
d is the depth of still water;
h =
η +
d is the total depth of the water;
u,
v, and
w are the velocity components in the
x,
y, and
z directions, respectively;
S is the magnitude of the discharge due to point sources; and (
us,
vs) is the velocity at which the water is discharged into the ambient water [
55].
- (d)
The MIKE FLOOD Simulation Model
A dynamic link between the one-dimensional model and the two-dimensional model was developed in the form of a pair of points, where the endpoint of the tributary was assigned to a point or region in the two-dimensional model, e.g., the river flowing in or out of the lake. The types of connections in MIKE FLOOD (2014) [
56] include standard links, lateral links, structure links, and zero flow links. In a standard connection, one or several grid cells of MIKE 21 are linked to one end of the flow in MIKE 11. Standard connections are available when only the ends of a stream have water pouring out, such as water pipes. In a lateral connection, a sequence of grid cells in MIKE 21 will be linked to either side of a flow segment (a section, a flow section, or an entire flow). We used lateral links when the current was likely to overflow, such as rivers and the sea [
54]. MIKE FLOOD has the following model connection types: HD coupling, AD coupling, and both dynamic and propagandistic connections. The connection depends on the requirements of each problem [
56].
2.2.3. Setting Up the Model
This study used the following data as input for the model:
- −
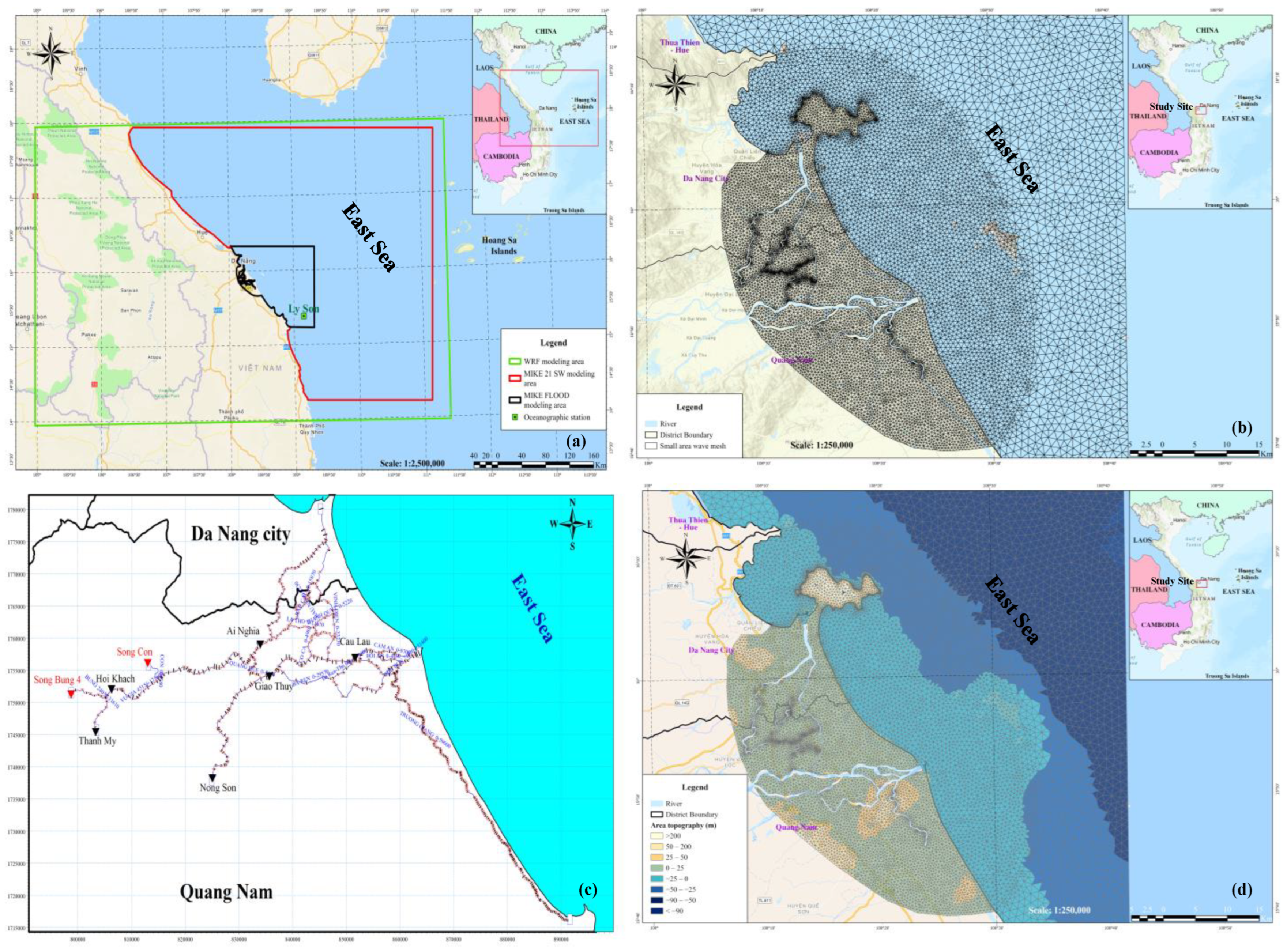
Discharge data from the hydrographic stations of Nong Son and Thanh My (
Figure 3c);
- −
Water level data from the stations of Hoi Khach, Ai Nghia, Giao Thuy, Cau Lau, Hoi An, Son Tra, and Ly Son (
Figure 3a,c);
- −
For some coastal estuary locations where there was no measuring station, this study used the tides predictions in the MIKE 21 toolbox as the lower boundary for the calculation model (
Figure 3d);
- −
Meteorological data from the COAWST model with a resolution of 0.125° (14 km);
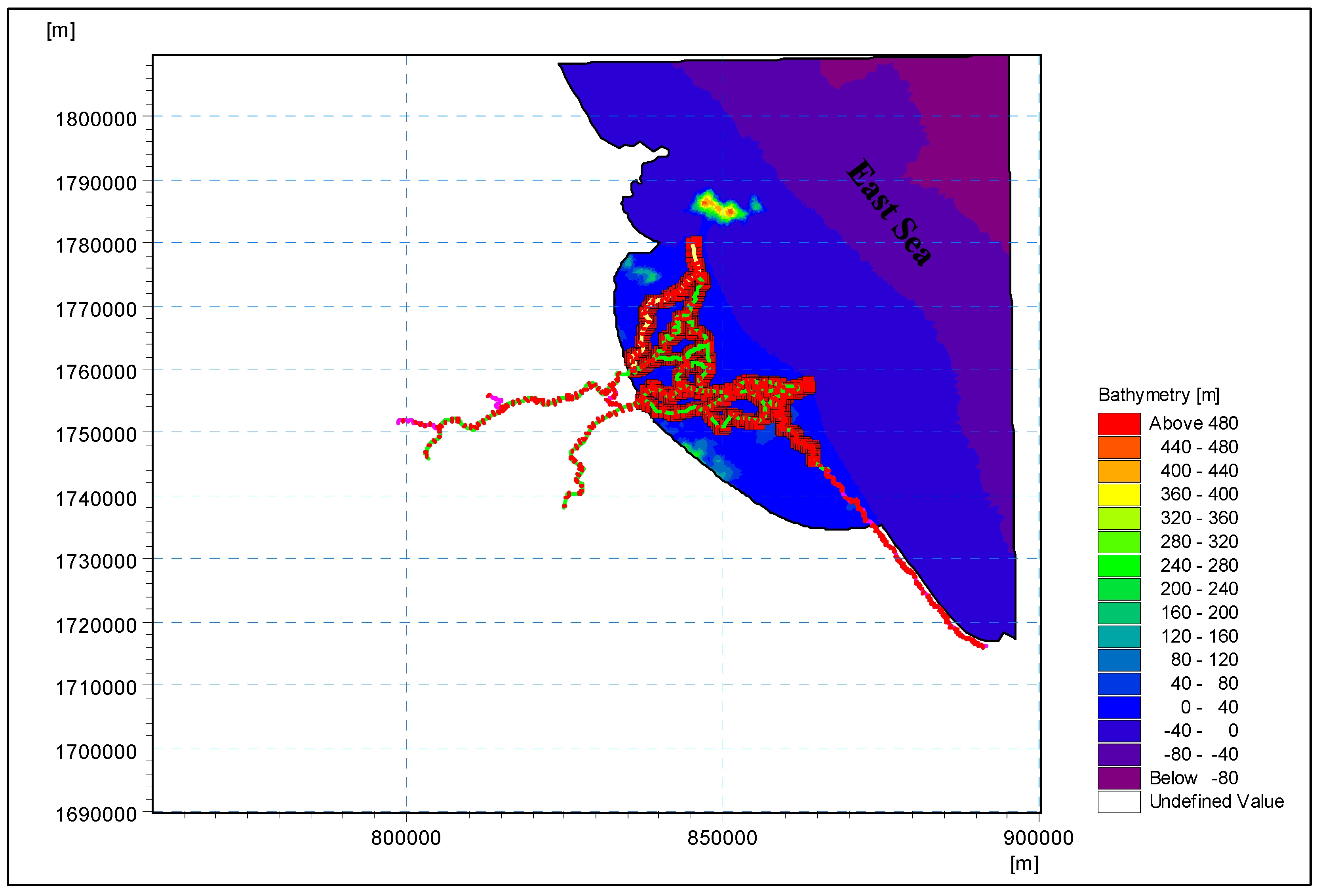
- −
Topography: DEM 30 m × 30 m;
- −
The study established an integrated mesh of the meteorological, wave, and hydraulic data at the study site and detailed mesh coupling of rivers and the sea (
Figure 3a,b).
The hydraulic network of the MIKE 11 HD model was established for the Vu Gia-Thu Bon River river system: Vu Gia River, Thu Bon River, Bung River, Cai River, Con River, Co Co River, Vinh Dien River, Ba Ren River, La Tho River, and Ai Nghia River (
Figure 3c).
To obtain a wave field for the study area, it was necessary to simulate the wave field for the wider area, so the calculation range of the selection model was as shown below. The wide area of the simulated waves ensured that the scale of the wind’s momentum was large enough to form a wave mode that propagated into the coastal area to create a high-precision wave field. The domain used for the area of the MIKE 21 SW model was limited from longitudes of 106°44′ E to 111°23′ E and latitudes of 14°23′ N to 17°88′ N.
After simulating the waves for the entire large area, this study set the domain for the study area, using the wave transmission function from the deep-water wave model to the study area with the margins scaled.
A small grid area was modeled for the area of 108°02′ E to 109°32′ E and 15°24′ N to 16°31′ N. The grid of signal h was selected as a grid combining unstructured grids, and the domain had a mesh of 24,000 elements and 1300 grid nodes. In particular, the area was set up with a relatively detailed grid with a smooth resolution in the coastal area, with the smallest mesh edge being about 10 m. The zone was set up with a rough grid in the offshore area, with the largest mesh edge being 1000 m (
Figure 3d).
The MIKE 21 FM model was set up using the same mesh as the MIKE 21 SW model, with the marginal data being the tidal water level obtained by DHI’s MIKE 21 toolbox. The MIKE 21 model, once set up for the study area, was connected to the simulated hydrometry network in the MIKE 11 model described above to establish the MIKE FLOOD model that simulated flooding over the study area.
The MIKE FLOOD model was established on the coupled link between MIKE 11 and MIKE 21 for the study area. The link was lateral, connecting the left and right banks. For the chainage of the river’s end, the link was the standard link for the hydraulic connection between MIKE 11 and MIKE 21 (
Figure 4).


 ,
, 














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}