
Unmanned Aerial Vehicles (UAV) Integration with Digital Technologies toward Construction 4.0: A Systematic Literature Review



Abstract
:1. Introduction
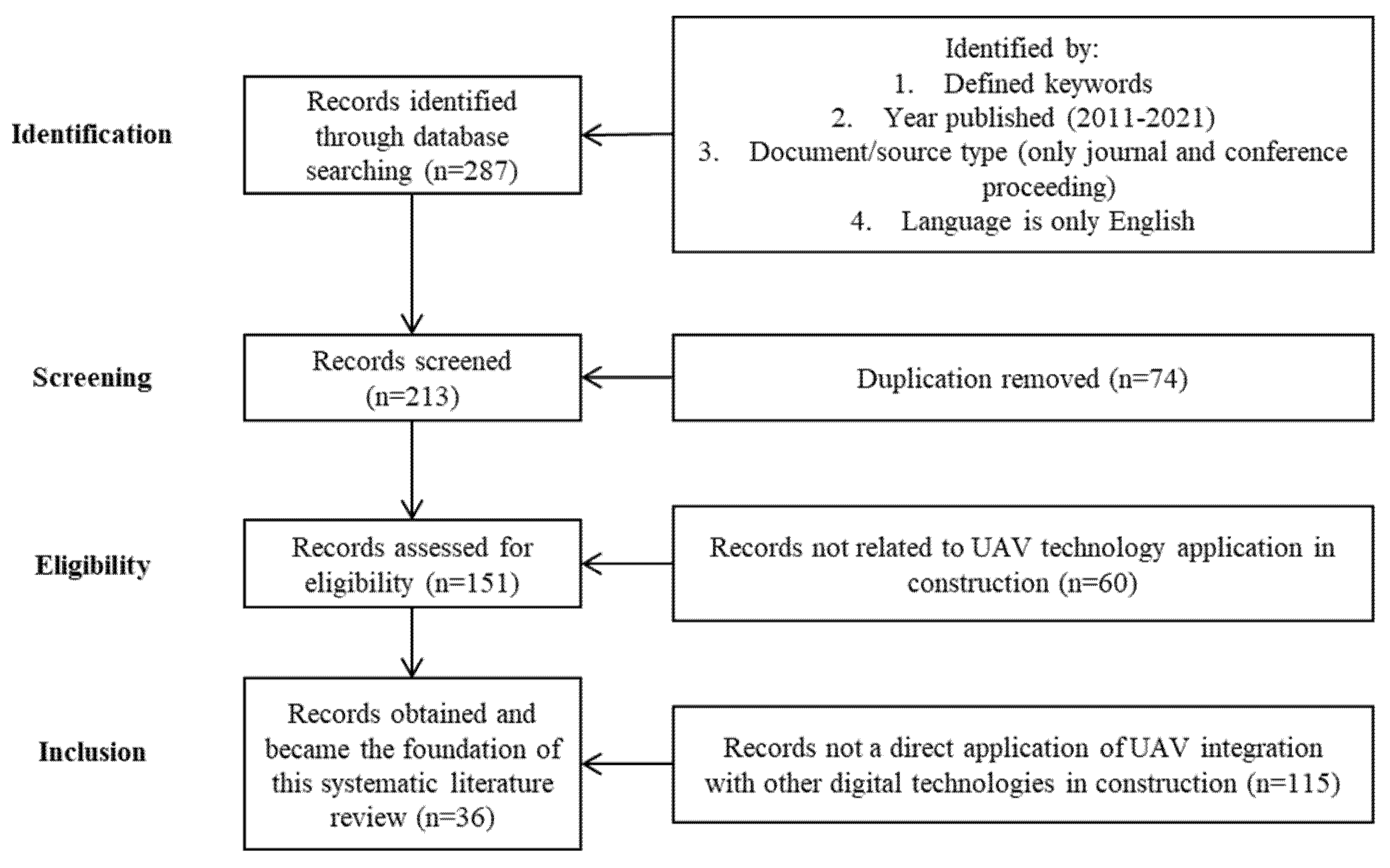
2. Materials and Methods
3. Results
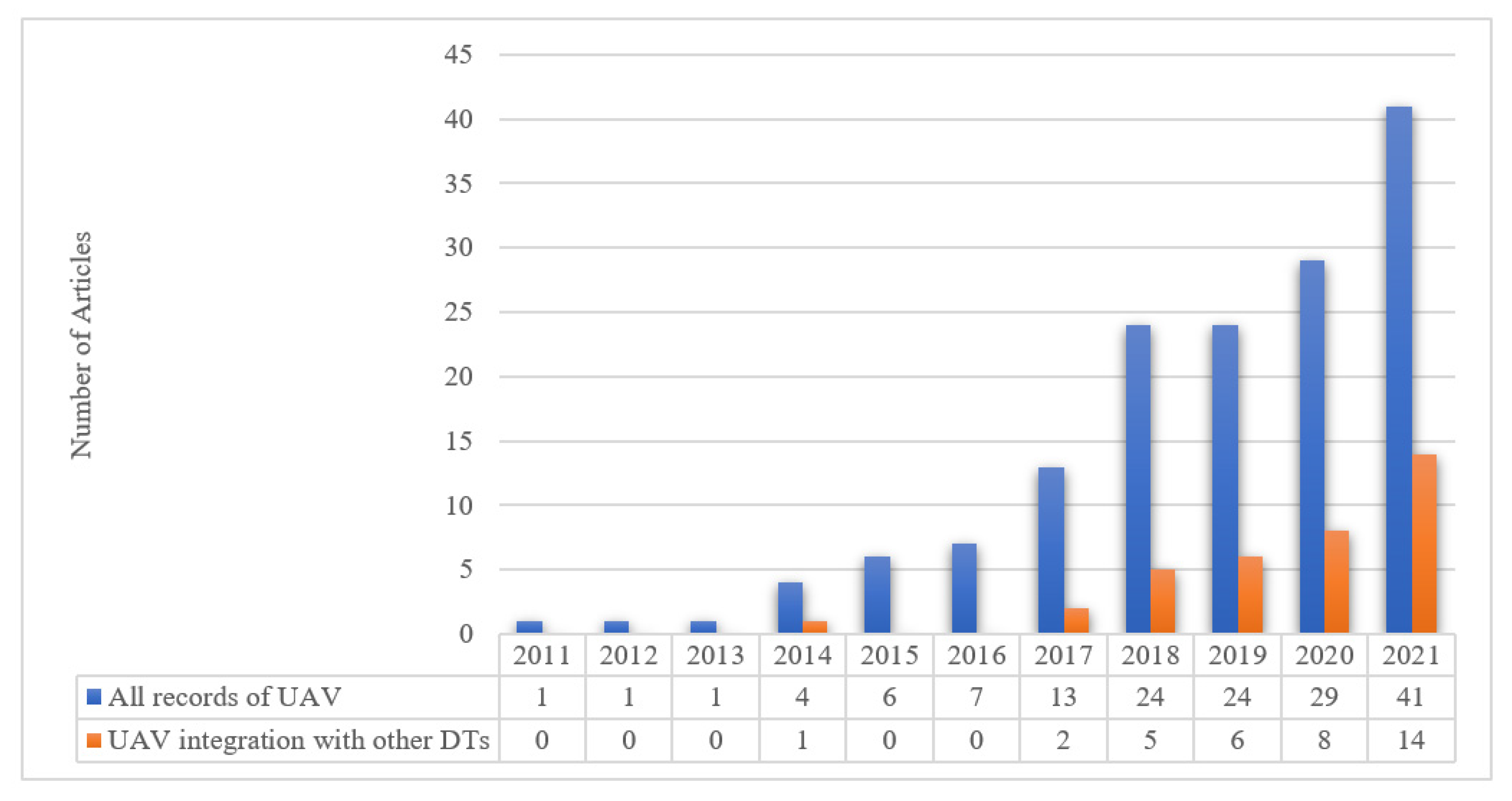
3.1. Time-Series Analysis
3.2. Country Analysis
3.3. Journal Allocation Analysis
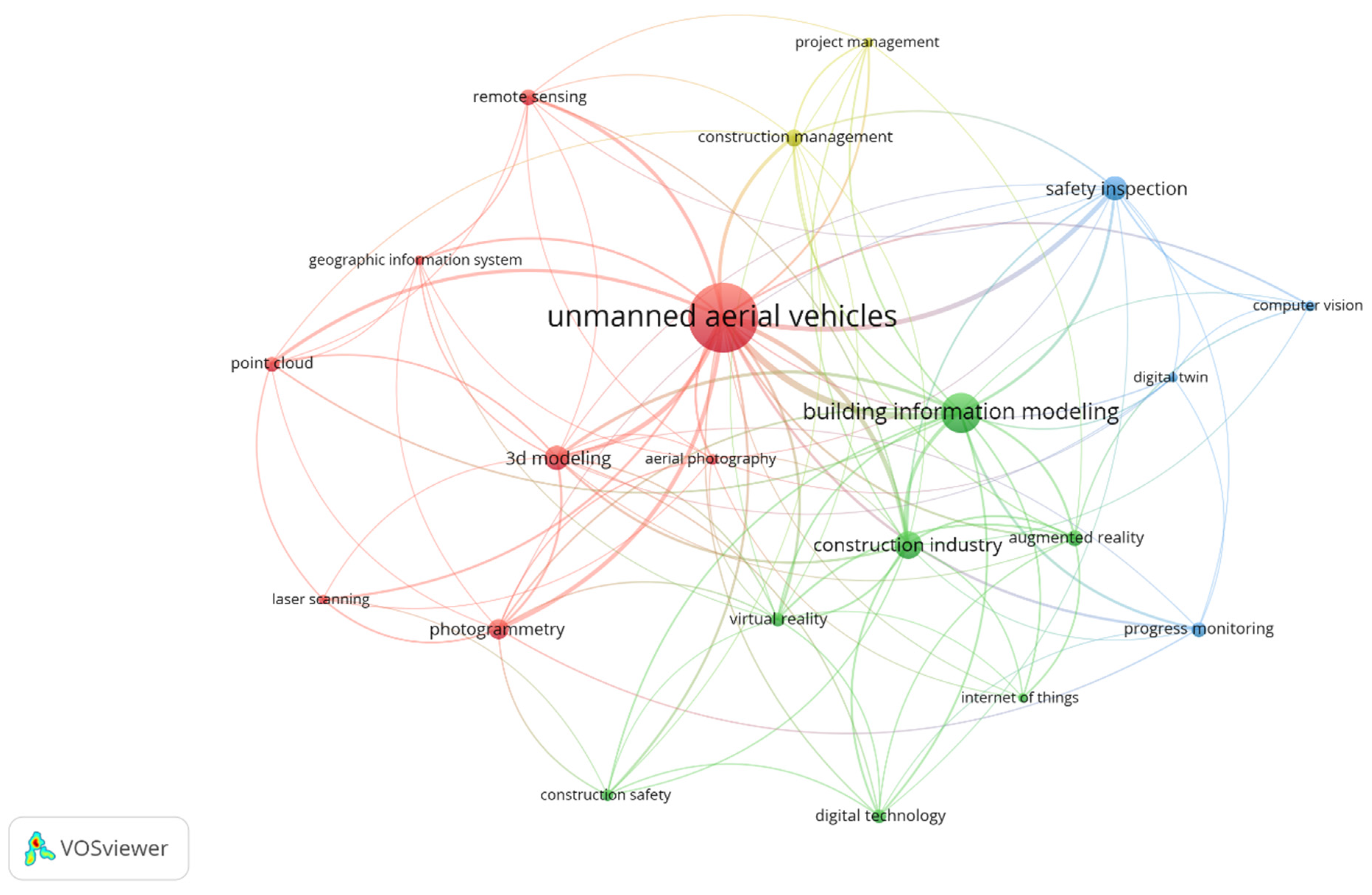
3.4. Co-Occurrence Keywords Analysis
3.4.1. UAV Technology Cluster
3.4.2. Other Digital Technologies Cluster
3.4.3. Construction Management Cluster
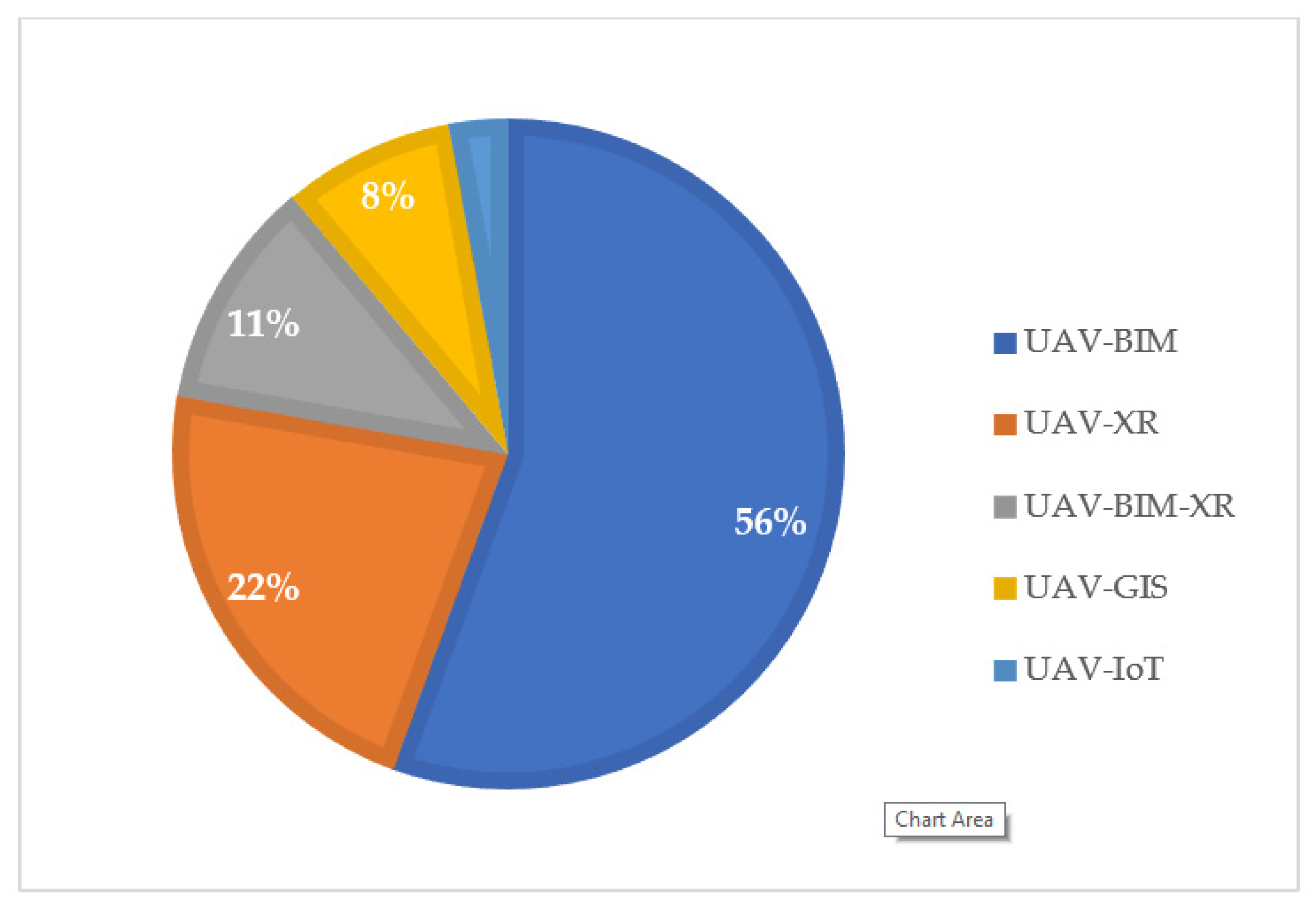
3.5. UAV Integration Type Analysis
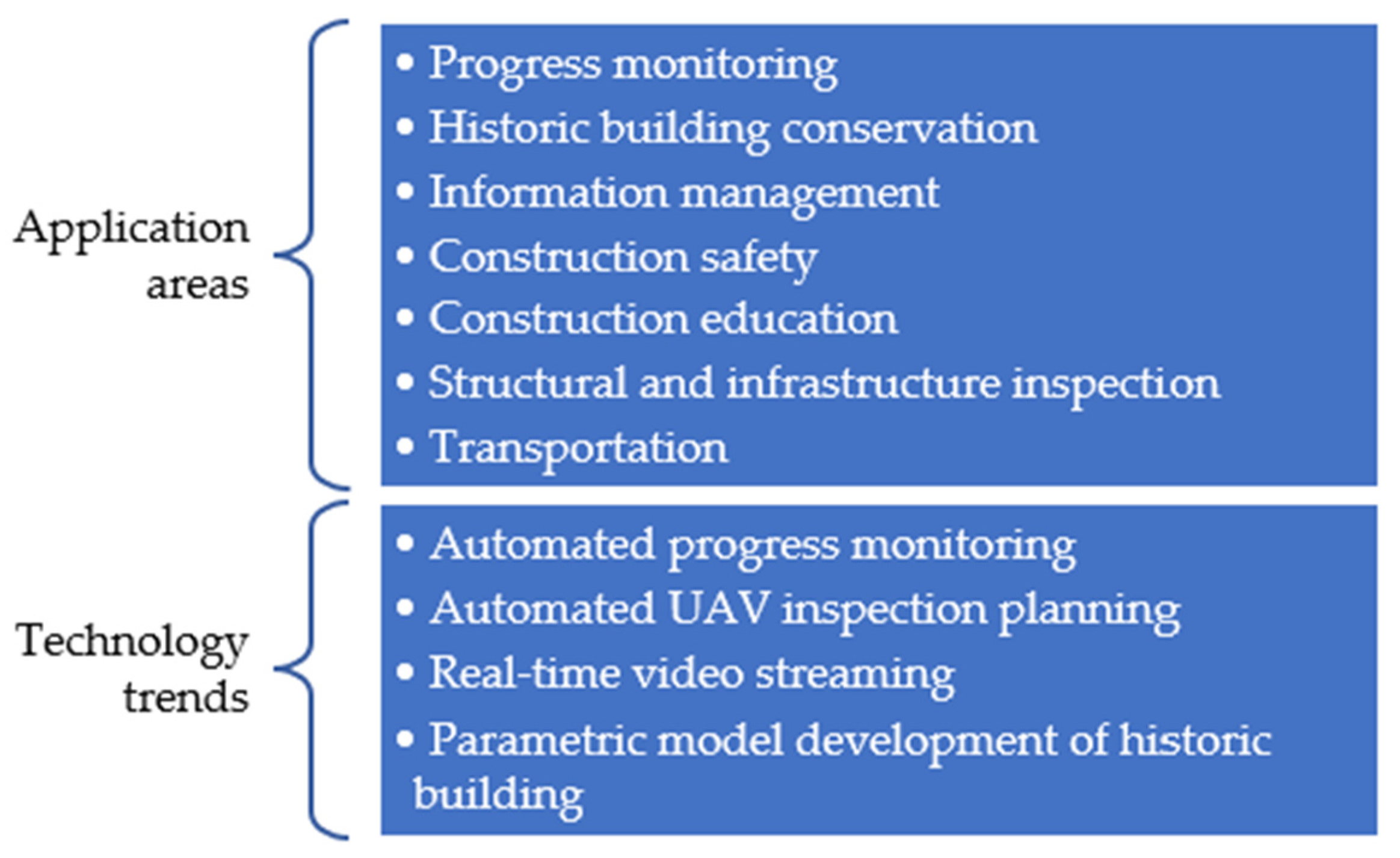
3.6. Application Areas of UAV Integration with Other DTs
3.6.1. Progress Monitoring
3.6.2. Historic Building Conservation
3.6.3. Information Management
3.6.4. Construction Safety
3.6.5. Construction Education
3.6.6. Structural and Infrastructure Inspection
3.6.7. Transportation
3.7. Technology Trends of UAV Integration with Other DTs
3.7.1. Automated Progress Monitoring
3.7.2. Automated UAV Inspection Planning
3.7.3. Real-Time Video Streaming
3.7.4. Parametric Model Development of Historic Building
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| ASCE | American Society of Civil Engineers |
| AR | Augmented Reality |
| BIM | Building Information Modeling |
| DEM | digital elevation model |
| DSM | digital surface model |
| DTs | digital technologies |
| XR | extended reality |
| GCPs | ground control points |
| GIS | Geographic Information System |
| IFC | Industry Foundation Classes |
| IoT | Internet of Things |
| MR | Mixed Reality |
| PRISMA | Preferred Reporting Items for Systematic Reviews and Meta-Analyses |
| RFID | radio frequency identification |
| SFM | structure from motion |
| SLAM | Simultaneous Localization and Mapping |
| UAV | Unmanned aerial vehicle |
| USA | United States of America |
| VR | Virtual Reality |
References
- Oesterreich, T.D.; Teuteberg, F. Understanding the implications of digitisation and automation in the context of Industry 4.0: A triangulation approach and elements of a research agenda for the construction industry. Comput. Ind. 2016, 83, 121–139. [Google Scholar] [CrossRef]
- Dallasega, P.; Rauch, E.; Linder, C. Industry 4.0 as an enabler of proximity for construction supply chains: A systematic literature review. Comput. Ind. 2018, 99, 205–225. [Google Scholar] [CrossRef]
- Wong, J.K.W.; Ge, J.; He, S.X. Digitisation in facilities management: A literature review and future research directions. Autom. Constr. 2018, 92, 312–326. [Google Scholar] [CrossRef]
- Perrier, N.; Bled, A.; Bourgault, M.; Cousin, N.; Danjou, C.; Pellerin, R.; Roland, T. Construction 4.0: A survey of research trends. J. Inf. Technol. Constr. 2020, 25, 416–437. [Google Scholar] [CrossRef]
- Azhar, S. Building Information Modeling (BIM): Trends, Benefits, Risks, and Challenges for the AEC Industry. Leadersh. Manag. Eng. 2011, 11, 241–252. [Google Scholar] [CrossRef]
- Ma, Z.; Ren, Y. Integrated Application of BIM and GIS: An Overview. Procedia Eng. 2017, 196, 1072–1079. [Google Scholar] [CrossRef]
- Siebert, S.; Teizer, J. Mobile 3D mapping for surveying earthwork projects using an Unmanned Aerial Vehicle (UAV) system. Autom. Constr. 2014, 41, 1–14. [Google Scholar] [CrossRef]
- Kwon, S.; Park, J.-W.; Moon, D.; Jung, S.; Park, H. Smart Merging Method for Hybrid Point Cloud Data using UAV and LIDAR in Earthwork Construction. Procedia Eng. 2017, 196, 21–28. [Google Scholar] [CrossRef]
- Jiang, W.; Zhou, Y.; Ding, L.; Zhou, C.; Ning, X. UAV-based 3D reconstruction for hoist site mapping and layout planning in petrochemical construction. Autom. Constr. 2020, 113, 103137. [Google Scholar] [CrossRef]
- Asadi, K.; Suresh, A.K.; Ender, A.; Gotad, S.; Maniyar, S.; Anand, S.; Noghabaei, M.; Han, K.; Lobaton, E.; Wu, T. An integrated UGV-UAV system for construction site data collection. Autom. Constr. 2020, 112, 103068. [Google Scholar] [CrossRef]
- Bognot, J.R.; Candido, C.G.; Blanco, A.; Montelibano, J.R.Y. Building Construction Progress Monitoring Using Unmanned Aerial System (Uas), Low-Cost Photogrammetry, And Geographic Information System (GIS). ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, IV-2, 41–47. [Google Scholar] [CrossRef] [Green Version]
- Narumi, T.; Aoki, S.; Muramatsub, F. Indoor Visualization Experiments at Building Construction Site Using High Safety UAV. In Proceedings of the International Symposium on Automation and Robotics in Construction, Banff, AB, Canada, 21–24 May 2019; pp. 961–966. [Google Scholar] [CrossRef] [Green Version]
- Gheisari, M.; Rashidi, A.; Esmaeili, B. Using Unmanned Aerial Systems for Automated Fall Hazard Monitoring. In Construction Research Congress 2018; American Society of Civil Engineers: New Orleans, LA, USA, 2018; pp. 62–72. [Google Scholar] [CrossRef]
- Tan, Y.; Li, S.; Liu, H.; Chen, P.; Zhou, Z. Automatic inspection data collection of building surface based on BIM and UAV. Autom. Constr. 2021, 131, 103881. [Google Scholar] [CrossRef]
- Aliyari, M.; Ashrafi, B.; Ayele, Y.Z. Hazards identification and risk assessment for UAV–assisted bridge inspections. Struct. Infrastruct. Eng. 2022, 18, 412–428. [Google Scholar] [CrossRef]
- Zhou, J.; Lee, I.; Thomas, B.; Menassa, R.; Farrant, A.; Sansome, A. In-Situ Support for Automotive Manufacturing Using Spatial Augmented Reality. Int. J. Virtual Real. 2012, 11, 33–41. [Google Scholar] [CrossRef] [Green Version]
- Hou, L.; Wang, X.; Bernold, L.; Love, P.E.D. Using Animated Augmented Reality to Cognitively Guide Assembly. J. Comput. Civ. Eng. 2013, 27, 439–451. [Google Scholar] [CrossRef]
- Chi, H.-L.; Kang, S.-C.; Wang, X. Research trends and opportunities of augmented reality applications in architecture, engineering, and construction. Autom. Constr. 2013, 33, 116–122. [Google Scholar] [CrossRef]
- Alizadehsalehi, S.; Yitmen, I. Digital twin-based progress monitoring management model through reality capture to extended reality technologies (DRX). Smart Sustain. Built Environ. 2021. [Google Scholar] [CrossRef]
- Khan, A.; Sepasgozar, S.; Liu, T.; Yu, R. Integration of BIM and Immersive Technologies for AEC: A Scientometric-SWOT Analysis and Critical Content Review. Buildings 2021, 11, 126. [Google Scholar] [CrossRef]
- Kitchenham, B.; Charters, S. Guidelines for Performing Systematic Literature Reviews in Software Engineering; Version 2.3; EBSE Technical Report EBSE-2007-01; School of Computer Science and Mathematics, Keele University: Keele, UK; University of Durham: Durham, UK, 2007. [Google Scholar]
- Page, M.J.; McKenzie, J.E.; Bossuyt, P.M.; Boutron, I.; Hoffmann, T.C.; Mulrow, C.D.; Shamseer, L.; Tetzlaff, J.M.; Akl, E.A.; Brennan, S.E.; et al. The PRISMA 2020 statement: An updated guideline for reporting systematic reviews. BMJ 2021, 372, 105906. [Google Scholar] [CrossRef]
- Gheisari, M.; Irizarry, J.; Walker, B.N. UAS4SAFETY: The Potential of Unmanned Aerial Systems for Construction Safety Applications. In Construction Research Congress 2014; American Society of Civil Engineers: Atlanta, GA, USA, 2014; pp. 1801–1810. [Google Scholar] [CrossRef]
- Irizarry, J.; Gheisari, M.; Walker, B.N. Usability assessment of drone technology as safety inspection tools. J. Inf. Technol. Constr. (ITcon) 2012, 17, 194–212. Available online: http://www.itcon.org/2012/12 (accessed on 23 February 2022).
- Wen, M.-C.; Kang, S.-C. Augmented Reality and Unmanned Aerial Vehicle Assist in Construction Management. In Computing in Civil and Building Engineering; American Society of Civil Engineers: Orlando, FL, USA, 2014; pp. 1570–1577. [Google Scholar] [CrossRef] [Green Version]
- Kim, H.; Lee, J.; Ahn, E.; Cho, S.; Shin, M.; Sim, S.-H. Concrete Crack Identification Using a UAV Incorporating Hybrid Image Processing. Sensors 2017, 17, 2052. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Entrop, A.G.; Vasenev, A. Infrared drones in the construction industry: Designing a protocol for building thermography procedures. Energy Procedia 2017, 132, 63–68. [Google Scholar] [CrossRef]
- Tomita, H.; Takabatake, T.; Sakamoto, S.; Arisumi, H.; Kato, S.; Ohgusu, Y. Development of UAV Indoor Flight Technology for Building Equipment Works. In Proceedings of the International Symposium on Automation and Robotics in Construction, Taipei, Taiwan, 28 June–1 July 2017; pp. 452–457. [Google Scholar] [CrossRef] [Green Version]
- Mustaffa, A.A.; Hasmori, M.F.; Sarif, A.S.; Ahmad, N.F.; Zainun, N.Y. The Use of UAV in Housing Renovation Identification: A Case Study at Taman Manis 2. IOP Conf. Series: Earth Environ. Sci. 2018, 140, 012003. [Google Scholar] [CrossRef] [Green Version]
- Templin, T.; Popielarczyk, D. The Use of Low-Cost Unmanned Aerial Vehicles in the Process of Building Models for Cultural Tourism, 3D Web and Augmented/Mixed Reality Applications. Sensors 2020, 20, 5457. [Google Scholar] [CrossRef] [PubMed]
- Patel, T.; Suthar, V.; Bhatt, N. Application of Remotely Piloted Unmanned Aerial Vehicle in Construction Management. In Recent Trends in Civil Engineering; Pathak, K.K., Bandara, J.M.S.J., Agrawal, R., Eds.; Lecture Notes in Civil Engineering; Springer: Singapore, 2021; Volume 77, pp. 319–329. [Google Scholar] [CrossRef]
- Melo, R.; Costa, D.B.; Álvares, J.; Irizarry, J. Applicability of unmanned aerial system (UAS) for safety inspection on construction sites. Saf. Sci. 2017, 98, 174–185. [Google Scholar] [CrossRef]
- van Eck, N.J.; Waltman, L. Visualizing Bibliometric Networks, In Measuring Scholarly Impact: Methods and Practice; Ding, Y., Rousseau, R., Wolfram, D., Eds.; Springer: Cham, Switzerland, 2014; pp. 285–320. [Google Scholar]
- Duarte-Vidal, L.; Herrera, R.F.; Atencio, E.; Rivera, F.M.-L. Interoperability of Digital Tools for the Monitoring and Control of Construction Projects. Appl. Sci. 2021, 11, 10370. [Google Scholar] [CrossRef]
- Fernández-Hernandez, J.; Gonzalezaguilera, D.; Rodríguez-Gonzálvez, P.; Mancerataboada, J. Image-Based Modelling from Unmanned Aerial Vehicle (UAV) Photogrammetry: An Effective, Low-Cost Tool for Archaeological Applications: Image-Based Modelling from UAV Photogrammetry. Archaeometry 2015, 57, 128–145. [Google Scholar] [CrossRef]
- Freimuth, H.; Müller, J.; Konig, M. Simulating and Executing UAV-Assisted Inspections on Construction Sites. In Proceedings of the 34th International Symposium on Automation and Robotics in Construction (ISARC), Taipei, Taiwan, 28 June–1 July 2017; pp. 647–654. [Google Scholar] [CrossRef] [Green Version]
- Hugenholtz, C.; Brown, O.; Walker, J.; Barchyn, T.; Nesbit, P.; Kucharczyk, M.; Myshak, S. Spatial Accuracy of UAV-Derived Orthoimagery and Topography: Comparing Photogrammetric Models Processed with Direct Geo-Referencing and Ground Control Points. Geomatica 2016, 70, 21–30. [Google Scholar] [CrossRef]
- Sestras, P.; Salagean, T.; Bilasco, S.; Bondrea, M.V.; Nas, S.; Fountas, S.; Spalevic, V.; Cimpeanu, S.M. Prospect of a Gis Based Digitization and 3d Model for a Better Management and Land use in a Specific Micro-Areal for Crop Trees. Environ. Eng. Manag. J. 2019, 18, 1269–1277. [Google Scholar] [CrossRef]
- Álvares, J.; Costa, D.B. Construction Progress Monitoring Using Unmanned Aerial System and 4D BIM. In Proceedings of the 27th Annual Conference of the International. Grupo para Construção Enxuta (IGLC), Dublin, Ireland, 3–5 July 2019; pp. 1445–1456. [Google Scholar] [CrossRef] [Green Version]
- Alizadehsalehi, S.; Yitmen, I.; Celik, T.; Arditi, D. The effectiveness of an integrated BIM/UAV model in managing safety on construction sites. Int. J. Occup. Safe. Ergon. 2020, 26, 829–844. [Google Scholar] [CrossRef]
- Zhou, S.; Gheisari, M. Unmanned aerial system applications in construction: A systematic review. Constr. Innov. 2018, 18, 453–468. [Google Scholar] [CrossRef]
- Tian, J.; Luo, S.; Wang, X.; Hu, J.; Yin, J. Crane Lifting Optimization and Construction Monitoring in Steel Bridge Construction Project Based on BIM and UAV. Adv. Civ. Eng. 2021, 2021, 5512229. [Google Scholar] [CrossRef]
- Albeaino, G.; Eiris, R.; Gheisari, M.; Issa, R.R. DroneSim: A VR-based flight training simulator for drone-mediated building inspections. Constr. Innov. 2021. [Google Scholar] [CrossRef]
- Yan, L.; Fukuda, T.; Yabuki, N. Intergrating UAV Development Technology with Augmented Reality Toward Landscape Tele-Simulation. In Proceedings of the 24th International Conference of the Association for Computer-Aided Architectural Design Research in Asia, Osaka, Japan, 22–24 April 2019; Volume 1, pp. 423–432. [Google Scholar]
- Olayiwola, J.; Akanmu, A.; Moghimi, Z. Enhancing Virtual Site Visits via Bi-Directional Coordination between Construction Sites and Classrooms. In Construction Research Congress; American Society of Civil Engineers: Tempe, AZ, USA, 2020; pp. 829–837. [Google Scholar] [CrossRef]
- Raimbaud, P.; Lou, R.; Merienne, F.; Danglade, F.; Figueroa, P.; Hernandez, J.T. BIM-based Mixed Reality Application for Supervision of Construction. In Proceedings of the 2019 IEEE Conference on Virtual Reality and 3D User Interfaces (VR), Osaka, Japan, 23–27 March 2019; pp. 1903–1907. [Google Scholar] [CrossRef] [Green Version]
- Sestras, P.; Roșca, S.; Bilașco, Ș.; Naș, S.; Buru, S.M.; Kovacs, L.; Spalević, V.; Sestras, A.F. Feasibility Assessments Using Unmanned Aerial Vehicle Technology in Heritage Buildings: Rehabilitation-Restoration, Spatial Analysis and Tourism Potential Analysis. Sensors 2020, 20, 2054. [Google Scholar] [CrossRef] [Green Version]
- Zhang, S.; Bogus, S.M.; Lippitt, C.D.; Sprague, J.E. Geospatial Technologies for Collecting Construction Material Information. In Construction Research Congress; American Society of Civil Engineers: New Orleans, LA, USA, 2018; pp. 660–669. [Google Scholar] [CrossRef]
- Hamledari, H.; Davari, S.; Sajedi, S.O.; Zangeneh, P.; McCabe, B.; Fischer, M. UAV Mission Planning Using Swarm Intelligence and 4D BIMs in Support of Vision-Based Construction Progress Monitoring and As-Built Modeling. In Construction Research Congress 2018; American Society of Civil Engineers: New Orleans, LA, USA, 2018; pp. 43–53. [Google Scholar] [CrossRef] [Green Version]
- Braun, A.; Tuttas, S.; Stilla, U.; Borrmann, U.S.A.A. Process- and Computer Vision-based Detection of As-Built Components on Construction Sites. In Proceedings of the International Symposium on Automation and Robotics in Construction, Taipei, Taiwan, 28 June–1 July 2018; pp. 662–668. [Google Scholar] [CrossRef] [Green Version]
- Hamledari, H.; Davari, S.; Azar, E.R.; McCabe, B.; Flager, F.; Fischer, M. UAV-Enabled Site-to-BIM Automation: Aerial Robotic- and Computer Vision-Based Development of As-Built/As-Is BIMs and Quality Control. In Construction Research Congress 2018; American Society of Civil Engineers: New Orleans, LA, USA, 2018; pp. 336–346. [Google Scholar] [CrossRef]
- Barrile, V.; Fotia, A.; Candela, G.; Bernardo, E. Integration Of 3d Model From Uav Survey In Bim Environment. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, XLII-2/W11, 195–199. [Google Scholar] [CrossRef] [Green Version]
- Brutto, M.L.; Iuculano, E.; Giudice, P.L. Integrating Topographic, Photogrammetric and Laser Scanning Techniques For A Scan-To-Bim Process. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2021, XLIII-B2-2021, 883–890. [Google Scholar] [CrossRef]
- Martínez-Carricondo, P.; Carvajal-Ramírez, F.; Yero-Paneque, L.; Agüera-Vega, F. Combination of nadiral and oblique UAV photogrammetry and HBIM for the virtual reconstruction of cultural heritage. Case study of Cortijo del Fraile in Níjar, Almería (Spain). Build. Res. Inf. 2020, 48, 140–159. [Google Scholar] [CrossRef]
- Martínez-Carricondo, P.; Carvajal-Ramírez, F.; Yero-Paneque, L.; Agüera-Vega, F. Combination of HBIM and UAV photogrammetry for modelling and documentation of forgotten heritage. Case study: Isabel II dam in Níjar (Almería, Spain). Heritage Sci. 2021, 9, 1–15. [Google Scholar] [CrossRef]
- To, A.; Liu, M.; Hairul, M.H.B.M.; Davis, J.G.; Lee, J.S.A.; Hesse, H.; Nguyen, H.D. Drone-Based AI and 3D Reconstruction for Digital Twin Augmentation. In International Conference on Human-Computer Interaction; Springer: Cham, Switzerland, 2021; pp. 511–529. [Google Scholar] [CrossRef]
- Wang, K.-C.; Gao, R.-J.; Tung, S.-H.; Chou, Y.-H. Improving Construction Demonstrations by Integrating BIM, UAV, and VR. In Proceedings of the International Symposium on Automation and Robotics in Construction, Kitakyushu, Japan, 26–30 October 2020; pp. 1–7. [Google Scholar] [CrossRef]
- Kim, S.; Irizarry, J.; Kanfer, R. Multilevel Goal Model for Decision-Making in UAS Visual Inspections in Construction and Infrastructure Projects. J. Manag. Eng. 2020, 36, 04020036. [Google Scholar] [CrossRef]
- Chen, Y.; Zhang, J.; Min, B. Applications of BIM And UAV To Construction Safety. In Proceedings of the 7th International Construction Conference Jointly with the Construction Research Congress (CRC 2019), Laval, QC, Canada, 12–15 June 2019. [Google Scholar]
- Manzoor, B.; Othman, I.; Pomares, J.C.; Chong, H.-Y. A Research Framework of Mitigating Construction Accidents in High-Rise Building Projects via Integrating Building Information Modeling with Emerging Digital Technologies. Appl. Sci. 2021, 11, 8359. [Google Scholar] [CrossRef]
- Vega, L.F.L.; Lopez-Neri, E.; Arellano-Muro, C.A.; Gonzalez-Jimenez, L.E.; Ghommam, J.; Carrasco-Navarro, R. UAV Flight Instructional Design for Industry 4.0 based on the Framework of Educational Mechatronics. In Proceedings of the IECON 2020 The 46th Annual Conference of the IEEE Industrial Electronics Society, Singapore, 19–21 September 2020; pp. 2313–2318. [Google Scholar] [CrossRef]
- Sakib, M.; Chaspari, T.; Ahn, C.; Behzadan, A. An Experimental Study of Wearable Technology and Immersive Virtual Reality for Drone Operator Training. In Proceedings of the 27th International Workshop on Intelligent Computing in Engineering, Online, 1–4 July 2020. [Google Scholar]
- Nguyen, D.-C.; Nguyen, T.-Q.; Jin, R.; Jeon, C.-H.; Shim, C.-S. BIM-based mixed-reality application for bridge inspection and maintenance. Constr. Innov. 2021. [Google Scholar] [CrossRef]
- Chen, K.; Reichard, G.; Akanmu, A.; Xu, X. Geo-registering UAV-captured close-range images to GIS-based spatial model for building façade inspections. Autom. Constr. 2020, 122, 103503. [Google Scholar] [CrossRef]
- Levine, N.M.; Spencer, B.F. Post-Earthquake Building Evaluation Using UAVs: A BIM-Based Digital Twin Framework. Sensors 2022, 22, 873. [Google Scholar] [CrossRef] [PubMed]
- Kim, J.; Lee, S.; Seo, J.; Lee, D.-E.; Choi, H. The Integration of Earthwork Design Review and Planning Using UAV-Based Point Cloud and BIM. Appl. Sci. 2021, 11, 3435. [Google Scholar] [CrossRef]
- Wang, D.; Wang, X.; Ren, B.; Wang, J.; Zeng, T.; Kang, D.; Wang, G. Vision-Based Productivity Analysis of Cable Crane Transportation Using Augmented Reality–Based Synthetic Image. J. Comput. Civ. Eng. 2022, 36, 04021030. [Google Scholar] [CrossRef]
- Leite, F.; Cho, Y.; Behzadan, A.H.; Lee, S.; Choe, S.; Fang, Y.; Akhavian, R.; Hwang, S. Visualization, Information Modeling, and Simulation: Grand Challenges in the Construction Industry. J. Comput. Civ. Eng. 2016, 30, 04016035. [Google Scholar] [CrossRef] [Green Version]
- Hamledari, H.; McCabe, B.; Davari, S.; Shahi, A. Automated Schedule and Progress Updating of IFC-Based 4D BIMs. J. Comput. Civ. Eng. 2017, 31, 04017012. [Google Scholar] [CrossRef]
- Phung, M.D.; Quach, C.H.; Dinh, T.H.; Ha, Q. Enhanced discrete particle swarm optimization path planning for UAV vision-based surface inspection. Autom. Constr. 2017, 81, 25–33. [Google Scholar] [CrossRef]
- Jung, S.; Song, S.; Youn, P.; Myung, H. Multi-Layer Coverage Path Planner for Autonomous Structural Inspection of High-Rise Structures. In 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS); IEEE: Madrid, Spain, 2018; pp. 1–9. [Google Scholar] [CrossRef]
- Bolourian, N.; Hammad, A. LiDAR-equipped UAV path planning considering potential locations of defects for bridge inspection. Autom. Constr. 2020, 117, 103250. [Google Scholar] [CrossRef]
- Ji, X.; Xiang, X.; Hu, T. Data-driven augmented reality display and operations for UAV ground stations. In Proceedings of the 2017 6th Data Driven Control and Learning Systems (DDCLS), Chongqing, China, 26–27 May 2017; pp. 557–560. [Google Scholar] [CrossRef]
- Nesbit, P.R.; Hugenholtz, C.H. Enhancing UAV–SfM 3D Model Accuracy in High-Relief Landscapes by Incorporating Oblique Images. Remote Sens. 2019, 11, 239. [Google Scholar] [CrossRef] [Green Version]
- Jiang, S.; Jiang, W. Efficient structure from motion for oblique UAV images based on maximal spanning tree expansion. ISPRS J. Photogramm. Remote Sens. 2017, 132, 140–161. [Google Scholar] [CrossRef]
- Fonstad, M.A.; Dietrich, J.T.; Courville, B.C.; Jensen, J.L.; Carbonneau, P.E. Topographic structure from motion: A new development in photogrammetric measurement: Topographic Structure from Motion. Earth Surf. Process. Landforms 2012, 38, 421–430. [Google Scholar] [CrossRef] [Green Version]
- Westoby, M.; Brasington, J.; Glasser, N.F.; Hambrey, M.J.; Reynolds, J.M. ‘Structure-from-Motion’ photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef] [Green Version]
- Agüera-Vega, F.; Carvajal-Ramírez, F.; Martínez-Carricondo, P. Assessment of photogrammetric mapping accuracy based on variation ground control points number using unmanned aerial vehicle. Measurement 2017, 98, 221–227. [Google Scholar] [CrossRef]
- Rodríguez-Moreno, C.; Reinoso-Gordo, J.F.; Rivas-López, E.; Gómez-Blanco, A.; Ariza-López, F.J.; Ariza-López, I. From point cloud to BIM: An integrated workflow for documentation, research and modelling of architectural heritage. Surv. Rev. 2018, 50, 212–231. [Google Scholar] [CrossRef]
- Dore, C.; Murphy, M. Current State of the Art Historic Building Information Modelling. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, XLII-2/W5, 185–192. [Google Scholar] [CrossRef] [Green Version]
- Adami, A.; Scala, B.; Spezzoni, A. Modelling and Accuracy In A Bim Environment For Planned Conservation: The Apartment Of Troia Of Giulio Romano. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, XLII-2/W3, 17–23. [Google Scholar] [CrossRef] [Green Version]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Literature Database | Records |
|---|---|
| Google Scholar | 8960 |
| Scopus | 287 |
| Science Direct | 276 |
| ASCE Library | 174 |
| Web of Science | 90 |
| Taylor and Francis Online | 47 |
| Wiley Online Library | 9 |
| Country | Number of Articles | Remarks |
|---|---|---|
| USA | 12 | |
| China | 6 | |
| Germany, Italy, Korea, Spain | 8 | Four countries presented two articles each |
| Brazil, Chile, France, Japan, Malaysia, Mexico, Philippines, Poland, Romania, Singapore | 10 | Ten countries presented one article each |
| Total | 36 |
| Journal Title | Number of Papers | JIF 2021 |
|---|---|---|
| Sensors | 3 | 3.576 |
| Applied Sciences | 3 | 2.679 |
| Automation in Construction | 2 | 7.700 |
| Construction Innovation | 2 | 2.667 |
| Journal of Management in Engineering | 1 | 6.853 |
| Building Research and Information | 1 | 5.322 |
| Journal of Computing in Civil Engineering | 1 | 2.979 |
| Heritage Science | 1 | 2.517 |
| Smart and Sustainable Built Environment | 1 | 2.054 |
| Advances in Civil Engineering | 1 | 1.924 |
| International Journal of Occupational Safety and Ergonomics | 1 | 1.601 |
| Total | 17 |
| Keywords | Occurrences | Total Link Strength |
|---|---|---|
| unmanned aerial vehicles | 128 | 212 |
| building information modeling | 52 | 113 |
| construction industry | 27 | 65 |
| 3d modeling | 23 | 60 |
| safety inspection | 22 | 49 |
| photogrammetry | 16 | 41 |
| augmented reality | 11 | 29 |
| virtual reality | 9 | 29 |
| construction management | 12 | 27 |
| point cloud | 10 | 23 |
| remote sensing | 11 | 22 |
| digital technology | 9 | 20 |
| progress monitoring | 10 | 20 |
| construction safety | 7 | 17 |
| aerial photography | 6 | 16 |
| project management | 5 | 15 |
| geographic information system | 5 | 13 |
| laser scanning | 5 | 13 |
| construction monitoring | 6 | 12 |
| internet of things | 5 | 11 |
| Application Area | Examples from Articles | Reference |
|---|---|---|
| Progress monitoring | Progress monitoring | [11,19,34,36,39,42,46,48,49,50,51] |
| Tracking material on sites | ||
| Historic building conservation | 3D modeling of historic building | [30,47,52,53,54,55] |
| Spatial analysis | ||
| Tourism potential analysis | ||
| Information management | Data collection of real-time as-built structure | [25,44,56,57,58] |
| Real-time video streaming | ||
| Decision-making assistance | ||
| Construction safety | Identification of potential hazard locations | [31,40,59,60] |
| Construction safety inspection | ||
| Construction education | Virtual site visit | [43,45,61,62] |
| Training simulation for inspection | ||
| Structural and infrastructure inspection | Building inspection | [14,63,64,65] |
| Bridge inspection | ||
| Post-earthquake building inspection | ||
| Transportation | Earthwork volume calculation | [66,67] |
| Heavy equipment planning |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rachmawati, T.S.N.; Kim, S. Unmanned Aerial Vehicles (UAV) Integration with Digital Technologies toward Construction 4.0: A Systematic Literature Review. Sustainability 2022, 14, 5708. https://doi.org/10.3390/su14095708
Rachmawati TSN, Kim S. Unmanned Aerial Vehicles (UAV) Integration with Digital Technologies toward Construction 4.0: A Systematic Literature Review. Sustainability. 2022; 14(9):5708. https://doi.org/10.3390/su14095708
Chicago/Turabian StyleRachmawati, Titi Sari Nurul, and Sunkuk Kim. 2022. "Unmanned Aerial Vehicles (UAV) Integration with Digital Technologies toward Construction 4.0: A Systematic Literature Review" Sustainability 14, no. 9: 5708. https://doi.org/10.3390/su14095708
APA StyleRachmawati, T. S. N., & Kim, S. (2022). Unmanned Aerial Vehicles (UAV) Integration with Digital Technologies toward Construction 4.0: A Systematic Literature Review. Sustainability, 14(9), 5708. https://doi.org/10.3390/su14095708