
Improved Perception of Motorcycles by Simulator-Based Driving Education



Abstract
1. Introduction
1.1. State of the Art in Driver Education
1.2. Types of Motorcycle Accidents
1.3. Human Factors Related to Motorcycle Accidents
1.4. Research on Training Methods
2. Materials and Methods
2.1. Training Methods
2.1.1. Variable Priority Training
- Mean motorcycle perception performance (calculated as a percentage from the earliest possible detection);
- Number of motorcycle encounters (N = 3);
- Number of motorcycles detected by the trainee;
- Graphical illustration and numerical motorcycle perception performance for each individual encounter.
- Percentage of time the trainee drove within the speed limits;
- Driving performance as the percentage of the driving duration relative to the optimal duration;
- Length of the driven route in km;
- Duration of driving in seconds;
- Optimal duration of driving in conformity with applicable speed limits.
2.1.2. Equal Priority Training
2.1.3. Equal Priority Training with Motorcycle Warning
2.1.4. Control Group
2.2. Driving Simulator
Pressure Sensitive Steering Wheel
2.3. Driving Scenarios
2.4. Experimental Procedure
- One trip on the urban road with high contrast, with five motorcycle encounters per trip;
- One trip on the rural road with high contrast, with five motorcycle encounters per trip;
- One trip on the rural road with low contrast, with five motorcycle encounters per trip.
2.5. Participants
2.6. Dependent Measures
2.7. Data Analysis
3. Results
3.1. Training Effects
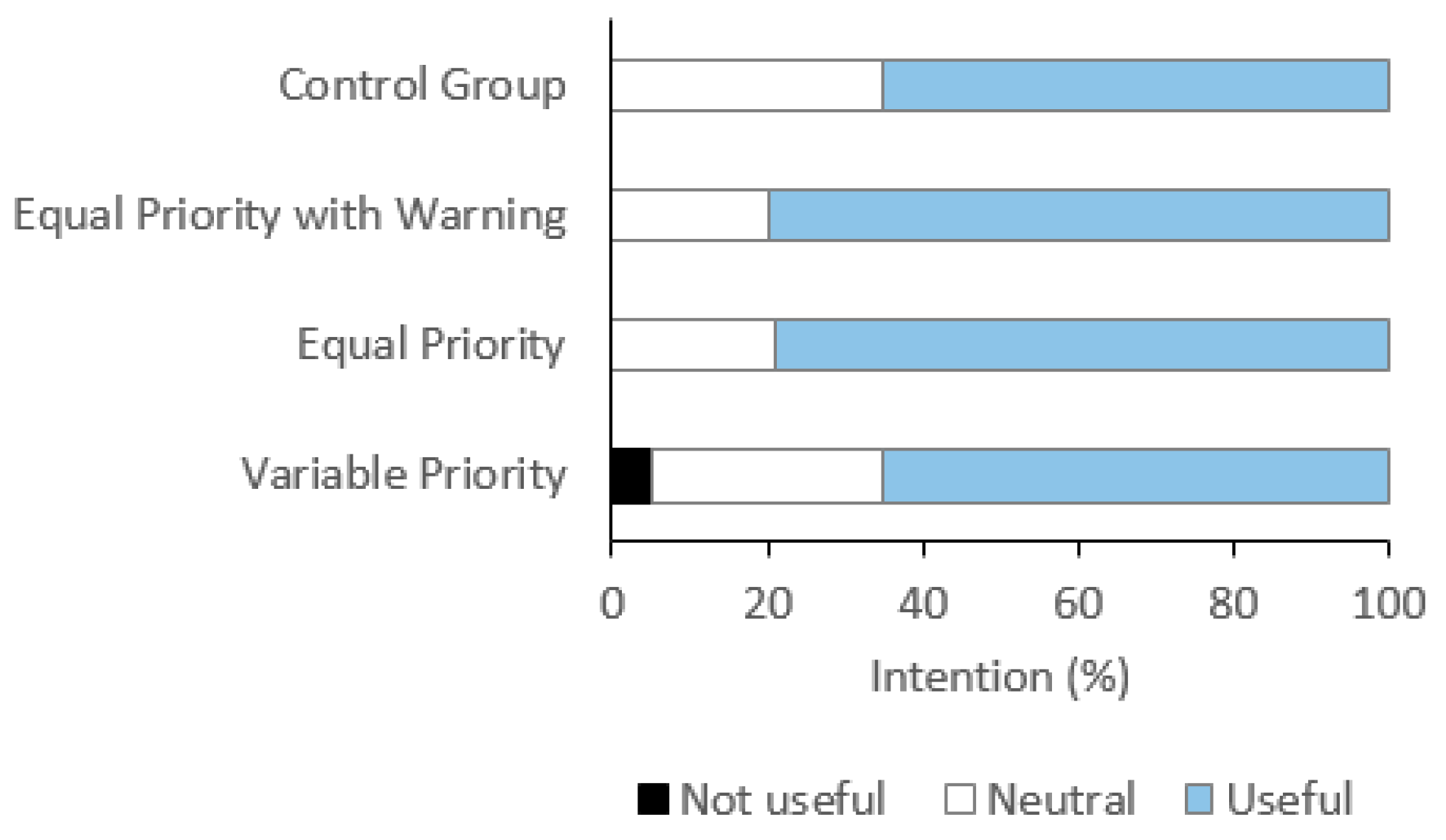
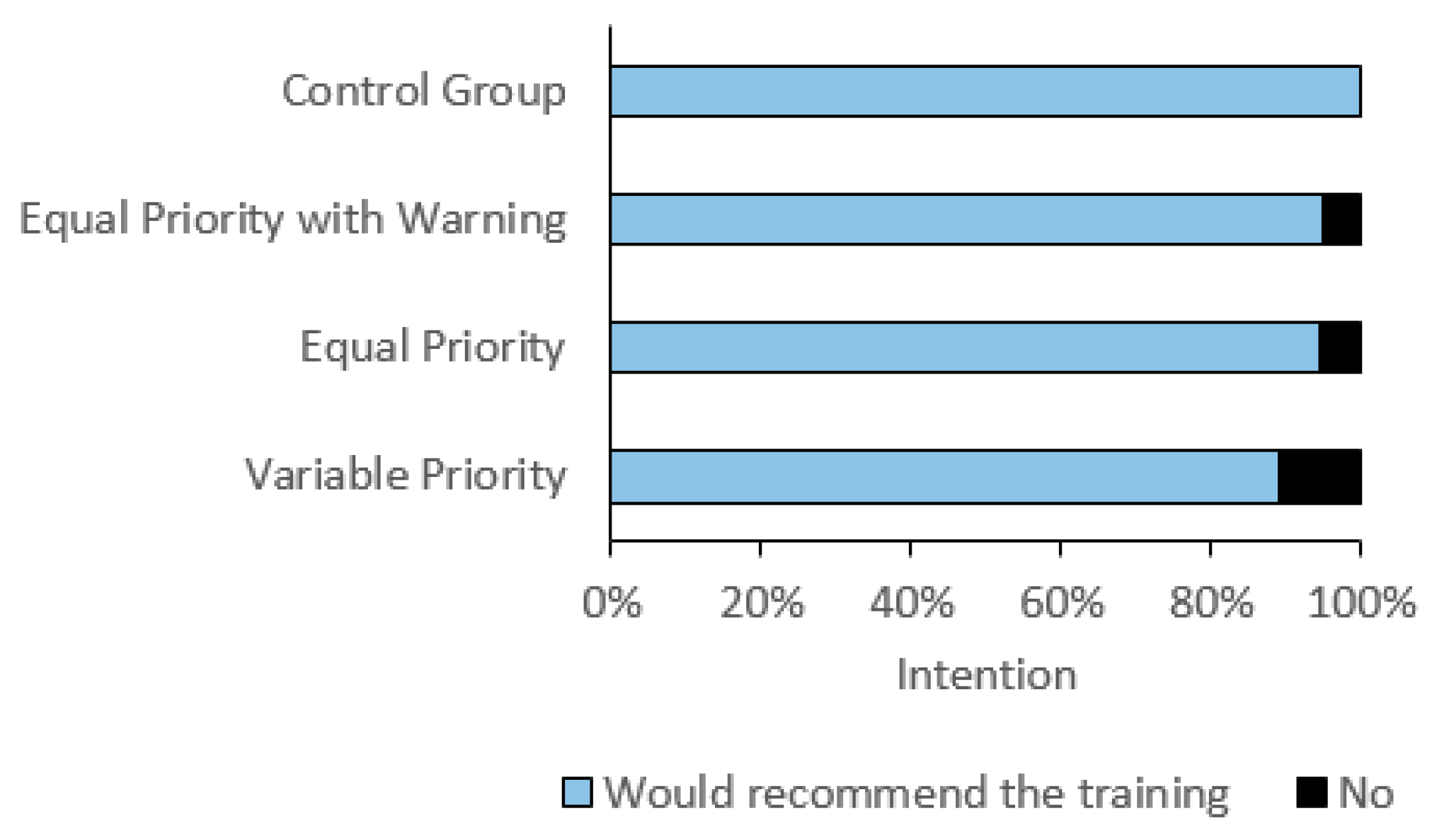
3.2. Subjective Assessment of the Training
4. Discussion
4.1. Training Effects on the Perceptibility of Motorcycles on Urban Roads with High Contrast
4.2. Motorcycle Perceptibility on Rural Roads with High Contrast
4.3. Motorcycle Perceptibility on Rural Roads with Low Contrast
4.4. Overall Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- European Commission. Traffic Safety Basic Facts on Motorcycles & Mopeds; European Commission: Brussels, Belgium, 2017. [Google Scholar]
- European Commission. 2017 Road Safety Statistics: What is Behind the Figures? European Commission: Brussels, Belgium, 2018; p. 5. [Google Scholar]
- Statistik Austria. Straßenverkehrsunfälle 2014, 1. Bis 4. Quartal Jahresergebnisse; Statistik Austria: Wien, Austria, 2015.
- Yasin, Y.J.; Grivna, M.; Abu-Zidan, F.M. Motorized 2–3 wheelers death rates over a decade: A global study. World J. Emerg. Surg. 2022, 17, 7. [Google Scholar] [CrossRef] [PubMed]
- Ijaz, M.; Lan, L.; Usman, S.M.; Zahid, M.; Jamal, A. Investigation of factors influencing motorcyclist injury severity using random parameters logit model with heterogeneity in means and variances. Int. J. Crashworthiness 2021. [Google Scholar] [CrossRef]
- Martins, R.S.; Saqib, S.U.; Raja, M.H.R.; Gillani, M.; Zafar, H. Collision versus loss-of-control motorcycle accidents: Comparing injuries and outcomes. Traffic Inj. Prev. 2022, 1–5. [Google Scholar] [CrossRef] [PubMed]
- Abrari Vajari, M.; Aghabayk, K.; Sadeghian, M.; Shiwakoti, N. A multinomial logit model of motorcycle crash severity at Australian intersections. J. Saf. Res. 2020, 73, 17–24. [Google Scholar] [CrossRef] [PubMed]
- Bartl, G.; Hager, B.; Urbanek, K. Unfallursachenanalyse von Zweiradfahrern; Kuratorium für Verkehrssicherheit (KfV): Wien, Austria, 2009. [Google Scholar]
- Walter, E.; Cavegn, M.; Ewert, U.; Scaramuzza, G.; Achermann-Stürmer, Y.; Niemann, S.; Uhr, A. Motorradverkehr; Beratungsstelle für Unfallverhütung: Bern, Switzerland, 2014. [Google Scholar]
- Unger, T.; Widmann, C.; Pschenitza, M. Unfälle mit Motorrädern, Neue Aspekte der Motorradsicherheit! ADAC: Berlin, Germany, 2013. [Google Scholar]
- Widmann, C.; Unger, T.; Pschenitza, M. Unfälle mit Motorrädern—Neue Aspekte der Motorradsicherheit! ADAC: Berlin, Germany, 2015; p. 33. [Google Scholar]
- Ker, K.; Roberts, I.; Collier, T.; Beyer, F.; Bunn, F.; Frost, C. Post-licence driver education for the prevention of road traffic crashes: A systematic review of randomised controlled trials. Accid. Anal. Prev. 2005, 37, 305–313. [Google Scholar] [CrossRef] [PubMed]
- Christie, R. The Effectiveness of Driver Training as a Road Safety Measure: A Review of the Literature; The National Academies of Sciences: Washington, DC, USA, 2001. [Google Scholar]
- Isler, R.B.; Starkey, N.J.; Sheppard, P. Effects of higher-order driving skill training on young, inexperienced drivers’ on-road driving performance. Accid. Anal. Prev. 2011, 43, 1818–1827. [Google Scholar] [CrossRef]
- Mayhew, D.R.; Simpson, H.M. The safety value of driver education and training. Inj. Prev. 2002, 8, ii3–ii8. [Google Scholar] [CrossRef]
- Schneider, C.A.; Hajiseyedjavadi, F.; Tainter, F.; Michael Knodler, J.; Zhang, J.; Romoser, M.; Samuel, S.; Fisher, D. Measuring the Applicability of Intersection-Based Older Driver Training Programs. Transp. Res. Rec. 2020, 2674, 878–886. [Google Scholar] [CrossRef]
- Haworth, N.; Mulvihill, C.; Symmons, M. Hazard Perception and Responding by Motorcyclists: Background and Literature Review; Monash University Accident Research Centre: Melbourne, Australia, 2005. [Google Scholar]
- Damm, L.; Nachtergaële, C.; Meskali, M.; Berthelon, C. The evaluation of traditional and early driver training with simulated accident scenarios. Hum. Factors 2011, 53, 323–337. [Google Scholar] [CrossRef]
- Horswill, M.S. Improving Fitness to Drive: The Case for Hazard Perception Training. Aust. Psychol. 2016, 51, 173–181. [Google Scholar] [CrossRef]
- Wetton, M.A.; Horswill, M.S.; Hatherly, C.; Wood, J.M.; Pachana, N.A.; Anstey, K.J. The development and validation of two complementary measures of drivers’ hazard perception ability. Accid. Anal. Prev. 2010, 42, 1232–1239. [Google Scholar] [CrossRef] [PubMed]
- Wetton, M.A.; Hill, A.; Horswill, M.S. Are what happens next exercises and self-generated commentaries useful additions to hazard perception training for novice drivers? Accid. Anal. Prev. 2013, 54, 57–66. [Google Scholar] [CrossRef] [PubMed]
- Rosenbloom, T.; Perlman, A.; Pereg, A. Hazard perception of motorcyclists and car drivers. Accid. Anal. Prev. 2011, 43, 601–604. [Google Scholar] [CrossRef] [PubMed]
- Horswill, M.S.; Taylor, K.; Newnam, S.; Wetton, M.; Hill, A. Even highly experienced drivers benefit from a brief hazard perception training intervention. Accid. Anal. Prev. 2013, 52, 100–110. [Google Scholar] [CrossRef] [PubMed]
- Ka, E.; Kim, D.G.; Hong, J.; Lee, C. Implementing Surrogate Safety Measures in Driving Simulator and Evaluating the Safety Effects of Simulator-Based Training on Risky Driving Behaviors. J. Adv. Transp. 2020, 2020, 7525721. [Google Scholar] [CrossRef]
- Castro, C.; Ventsislavova, P.; Peña-Suarez, E.; Gugliotta, A.; Garcia-Fernandez, P.; Eisman, E.; Crundall, D. Proactive Listening to a Training Commentary improves hazard prediction. Saf. Sci. 2016, 82, 144–154. [Google Scholar] [CrossRef]
- Horswill, M.S.; Hill, A.; Silapurem, L.; Watson, M.O. A thousand years of crash experience in three hours: An online hazard perception training course for drivers. Accid. Anal. Prev. 2021, 152, 105969. [Google Scholar] [CrossRef]
- Crundall, D.; Andrews, B.; Van Loon, E.; Chapman, P. Commentary training improves responsiveness to hazards in a driving simulator. Accid. Anal. Prev. 2010, 42, 2117–2124. [Google Scholar] [CrossRef]
- Castro, C.; Muela, I.; Doncel, P.; García-Fernández, P. Hazard Perception and Prediction test for walking, riding a bike and driving a car: “Understanding of the global traffic situation”. PLoS ONE 2020, 15, e0238605. [Google Scholar] [CrossRef]
- Borowsky, A.; Shinar, D.; Oron-Gilad, T. Age, skill, and hazard perception in driving. Accid. Anal. Prev. 2010, 42, 1240–1249. [Google Scholar] [CrossRef]
- ÖAMTC Motorradunfälle—Unfallgeschehen und Unfallursachen auf Ausgewählten, “Klassischen” Motorradstrecken; ÖAMTC Unfallforschung: Vienna, Austria, 2016; p. 56.
- BMK. Österreichische Verkehrssicherheitsstrategie 2021–2030; BMK: Wien, Austria, 2021. [Google Scholar]
- Statistik Austria. Verletzte und Getötete 2012 bis 2015 nach Verkehrsarten; Statistik Austria: Wien, Austria, 2015.
- Kramlich, T. Noch immer gefaehrliche Begegnungen. Die häufigsten Gefahrensituationen für Motorradfahrer und die resultierenden Verletzungen. In Proceedings of the Sicherheit Umwelt Zukunft IV. Tagungsband der 4. Internationalen Motorradkonferenz 2002; Institut für Zweiradsicherheit GmbH: Essen, Germany, 2002; pp. 55–84. [Google Scholar]
- Kraut, M.; Eichberger, A.; Koglbauer, I.; Lex, C. Analyse relevanter Szenarien und Fahraufgaben zur Verringerung schwerer Pkw-Motorrad-Kollisionen. Z. Verk. 2020, 66, 257–269. [Google Scholar]
- MAIDS. Depth Investigation of Motorcycle Accidents; MAIDS: Brussels, Belgium, 2009. [Google Scholar]
- Winterthur Versicherung. DEKRA Auto und Motorrad: Auf Kollisionskurs? Motorradunfälle Vermeiden; Winterthur Versicherung: Winterthu, Switzerland; DEKRA AG: Stuttgart, Germany, 2004. [Google Scholar]
- Wells, S.; Mullin, B.; Norton, R.; Langley, J.; Connor, J.; Lay-Yee, R.; Jackson, R. Motorcycle rider conspicuity and crash related injury: Case-control study. Br. Med. J. 2004, 328, 857. [Google Scholar] [CrossRef] [PubMed]
- Walter, E.; Cavegn, M.; Scaramuzza, G.; Niemann, S.; Bächli-Biétry, J. Motorradverkehr; Beratungsstelle für Unfallverhütung: Bern, Switzerland, 2009. [Google Scholar]
- Koglbauer, I. Simulator Training Improves the Estimation of Collision Parameters and the Performance of Student Pilots. Procedia Soc. Behav. Sci. 2015, 209, 261–267. [Google Scholar] [CrossRef][Green Version]
- Koglbauer, I. Training for Prediction and Management of Complex and Dynamic Flight Situations. Procedia Soc. Behav. Sci. 2015, 209, 268–276. [Google Scholar] [CrossRef]
- Koglbauer, I.; Braunstingl, R. Ab initio pilot training for traffic separation and visual airport procedures in a naturalistic flight simulation environment. Transp. Res. Part F Traffic Psychol. Behav. 2018, 58, 23. [Google Scholar] [CrossRef]
- Wickens, C.D.; Hutchins, S.; Carolan, T.; Cumming, J. Effectiveness of part-task training and increasing-difficulty training strategies: A meta-analysis approach. Hum. Factors 2013, 55, 461–470. [Google Scholar] [CrossRef] [PubMed]
- Gopher, D.; Weil, M.; Siegel, D. Practice under changing priorities: An approach to the training of complex skills. Acta Psychol. 1989, 71, 147–177. [Google Scholar] [CrossRef]
- Gopher, D.; Weil, M.; Bareket, T. Transfer of skill from a computer game trainer to flight. Hum. Factors 1994, 36, 387–405. [Google Scholar] [CrossRef]
- Zahabi, M.; Nasr, V.; Abdul Razak, A.M.; McCanless, L.; Maredia, A.; Patranella, B.; Wozniak, D.; Shahini, F. Effect of variable priority training on police officer driving performance and workload. Ergonomics 2022. [Google Scholar] [CrossRef]
- Cassavaugh, N.D.; Kramer, A.F. Transfer of computer-based training to simulated driving in older adults. Appl. Ergon. 2009, 40, 943–952. [Google Scholar] [CrossRef]
- Eichberger, A.; Koglbauer, I.; Kraut, M. Improved Perception of Motorcycles; Forschungsarbeiten des Österreichischen Verkehrssicherheitsfonds: Graz, Austria, 2019; Available online: https://www.bmk.gv.at/dam/jcr:5111b52f-ab9b-488a-8c61-c34ce6b6489d/70_IMPMOD_ua.pdf (accessed on 27 April 2014).
- Koglbauer, I.V.; Eichberger, A.; Lex, C.; Bliem, N.; Sternat, A.S.; Holzinger, J.; Schinko, C.; Battel, M. Bewertung von Fahrerassistenzsystemen von nicht professionellen Fahrerinnen und Fahrern im Realversuch. In Humanwissenschaftliche Beiträge zur Verkehrssicherheit und Ökologie des Verkehrs, Mehr Sicheres Verhalten im Strassenverkehr; INFAR-Institut für Nachschulung: Salzburg, Austria, 2015; pp. 86–102. ISBN 978-3-200-04406-7. [Google Scholar]
- Koglbauer, I.; Holzinger, J.; Eichberger, A.; Lex, C. Drivers’ interaction with adaptive cruise control on dry and snowy roads with various tire-road grip potentials. J. Adv. Transp. 2017, 2017, 5496837. [Google Scholar] [CrossRef]
- Arefnezhad, S.; Eichberger, A.; Koglbauer, I.V. Effects of Automation and Fatigue on Drivers from Various Age Groups. Safety 2022, 8, 30. [Google Scholar] [CrossRef]
- Arefnezhad, S.; Hamet, J.; Eichberger, A.; Frühwirth, M.; Ischebeck, A.; Koglbauer, I.V.; Moser, M.; Yousefi, A. Driver drowsiness estimation using EEG signals with a dynamical encoder–decoder modeling framework. Sci. Rep. 2022, 12, 2650. [Google Scholar] [CrossRef] [PubMed]
- Arefnezhad, S.; Eichberger, A.; Frühwirth, M.; Kaufmann, C.; Moser, M.; Koglbauer, I.V. Driver Monitoring of Automated Vehicles by Classification of Driver Drowsiness Using a Deep Convolutional Neural Network Trained by Scalograms of ECG Signals. Energies 2022, 15, 480. [Google Scholar] [CrossRef]
- Schinko, C.; Peer, M.; Hammer, D.; Pirstinger, M.; Lex, C.; Koglbauer, I.V.; Eichberger, A.; Holzinger, J.; Eggeling, E.; Fellner, W.-D.; et al. Building a Driving Simulator with Parallax Barrier Displays. In Proceedings of the 11th Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2016), Rome, Italy, 27–29 February 2016; p. 283. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable Priority Group | Equal Priority Group | Equal Priority with Warning Group | Control Group |
|---|---|---|---|
| Driving instructions with variable priority | Driving instructions with equal priority | Driving instructions with equal priority | Driving instructions with equal priority |
| Training with motorcycle encounter scenarios | Training with motorcycle encounter scenarios | Training with motorcycle encounter scenarios | Training without motorcycle encounter scenarios |
| Feedback after each trip | No feedback | No feedback | No feedback |
| Training without motorcycle warning system | Training without motorcycle warning system | Training with motorcycle warning system | Training without motorcycle warning system |
| 5 trips on rural roads with high contrast and 3 motorcycle encounters per trip | 5 trips on rural roads with high contrast and 3 motorcycle encounters per trip | 5 trips on rural roads with high contrast and 3 motorcycle encounters per trip | 5 trips on rural roads with high contrast and no motorcycle encounters |
| 5 trips on urban roads with high contrast and 3 motorcycle encounters per trip | 5 trips on urban roads with high contrast and 3 motorcycle encounters per trip | 5 trips on urban roads with high contrast and 3 motorcycle encounters per trip | 5 trips on urban road with high contrast and with no motorcycle encounters |
| Scenarios on Rural Roads | Description |
|---|---|
Scenario 1 | In scenario 1, the car drives on the priority road, approaches an intersection with a non-priority road and should continue straight ahead. From the trainee’s point of view, the motorcyclist is approaching from the right, from the non-priority road. The motorcycle is traveling fast and brakes heavily shortly before the intersection. |
Scenario 2 | In scenario 2, the trainee is overtaken by a motorcycle. The motorcycle is first visible in the rear-view mirror and then in the left side mirror of the car. |
Scenario 3 | In scenario 3, the trainee drives in a left curve in a forest area. The motorcycle is an opposite traffic, showing typical motorcycle roll behavior in a curve. |
Scenario 4 | Scenario 4 occurs after an intersection, when the trainee is overtaking a slower forward driving car. Immediately after overtaking, a motorcycle approaches from the opposite direction. |
Scenario 5 | In scenario 5, the trainee needs to turn left at an intersection. Immediately before the prompt to turn left, the trainee encounters an oncoming motorcycle. A second motorcycle follows behind the first motorcycle, which results in a conflict if the trainee persists in carrying out the left turn. |
| Scenarios on Urban Roads | Description |
|---|---|
Scenario 1 | In scenario 1, the trainee is driving on an urban road towards an intersection with a motorcycle that approaches from the right and turns into the trainee’s lane. There are buildings along the sides of the urban road and vehicles are parked lengthways in the parking area, which obscures the driver’s view of the intersecting road. |
Scenario 2 | In scenario 2, the trainee drives the car out of a parking space into the traffic flow. At the time of pulling out of the parking space, a motorcycle approaches from behind, and thus creates a conflict situation in the lane used by the car driver. |
Scenario 3 | In scenario 3, the trainee is driving and maintaining an adequate distance from the car ahead. Shortly afterwards, a motorcycle pulls out of the right parking area in front of the trainee and is driving at a critical distance. |
Scenario 4 | In scenario 4, the trainee is driving behind a motorcycle that is following another car. Both the car in front and the motorcycle suddenly stop due to a traffic jam. The trainee needs to react quickly and brake in response to the situation. |
Scenario 5 | In scenario 5 the trainee is driving on an urban road and has to turn left. Immediately before turning, a motorcycle appears as oncoming traffic towards the trainee. |
| Group Group Size | Variable Priority (N = 20) | Equal Priority (N = 20) | Equal Priority and Warning (N = 20) | Control Group (N = 20) |
|---|---|---|---|---|
| Age | ||||
| Average | 18.25 years | 18.55 years | 18.35 years | 18.2 years |
| SD | 0.55 | 0.444 | 0.57 | 0.33 |
| Median | 18 | 18 | 18 | 18 |
| Driving experience (hours) in the last 90 days | ||||
| Average | 4.05 | 6.4 | 6.7 | 5.9 |
| SD | 1.27 | 1.42 | 2.003 | 1.47 |
| Median | 2.5 | 5 | 1.5 | 2 |
| Driving experience (hours) in the last 90 days | ||||
| Average | 10.3 | 10.4 | 10.4 | 13.55 |
| SD | 3.01 | 3.06 | 2.68 | 5.28 |
| Median | 3.5 | 6.5 | 9 | 4 |
| Group Group Size | Variable Priority (N = 20) | Equal Priority (N = 20) | Equal Priority and Warning (N = 20) | Control Group (N = 20) |
|---|---|---|---|---|
| Urban roads with high contrast | ||||
| Average | 52.63 | 47.72 | 45.62 | 52.80 |
| SD | 3.63 | 2.79 | 3.56 | 2.85 |
| Median | 59.01 | 49.12 | 48.89 | 56.15 |
| Rural roads with high contrast | ||||
| Average | 51.473 | 45.225 | 43.966 | 42.594 |
| SD | 3.739 | 2.598 | 2.918 | 3.378 |
| Median | 52.182 | 41.02 | 46.7 | 45.872 |
| Rural roads with low contrast | ||||
| Average | 58.156 | 49.611 | 47.358 | 45.846 |
| SD | 3.958 | 3.293 | 3.668 | 3.26 |
| Median | 59.265 | 53.226 | 49.017 | 46..797 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Eichberger, A.; Kraut, M.; Koglbauer, I.V. Improved Perception of Motorcycles by Simulator-Based Driving Education. Sustainability 2022, 14, 5283. https://doi.org/10.3390/su14095283
Eichberger A, Kraut M, Koglbauer IV. Improved Perception of Motorcycles by Simulator-Based Driving Education. Sustainability. 2022; 14(9):5283. https://doi.org/10.3390/su14095283
Chicago/Turabian StyleEichberger, Arno, Marianne Kraut, and Ioana V. Koglbauer. 2022. "Improved Perception of Motorcycles by Simulator-Based Driving Education" Sustainability 14, no. 9: 5283. https://doi.org/10.3390/su14095283
APA StyleEichberger, A., Kraut, M., & Koglbauer, I. V. (2022). Improved Perception of Motorcycles by Simulator-Based Driving Education. Sustainability, 14(9), 5283. https://doi.org/10.3390/su14095283