
Development of a Rapid Inspection Driving Cycle for Battery Electric Vehicles Based on Operational Safety




Abstract
:1. Introduction
- (1)
- Long cycle times. For example, the total durations of the NEDC, World Light Vehicle Test Cycle (WLTC), and China Light-Duty Vehicle Test Cycle-Passenger (CLTC-P) are 1180 s, 1800 s, and 1800 s. In addition, the amount of data and the complex combinations are difficult to find in real life.
- (2)
- The driving cycle inspection items are single and cannot complete the practical operation test, especially the dynamic test of electric vehicle operational safety.
- (1)
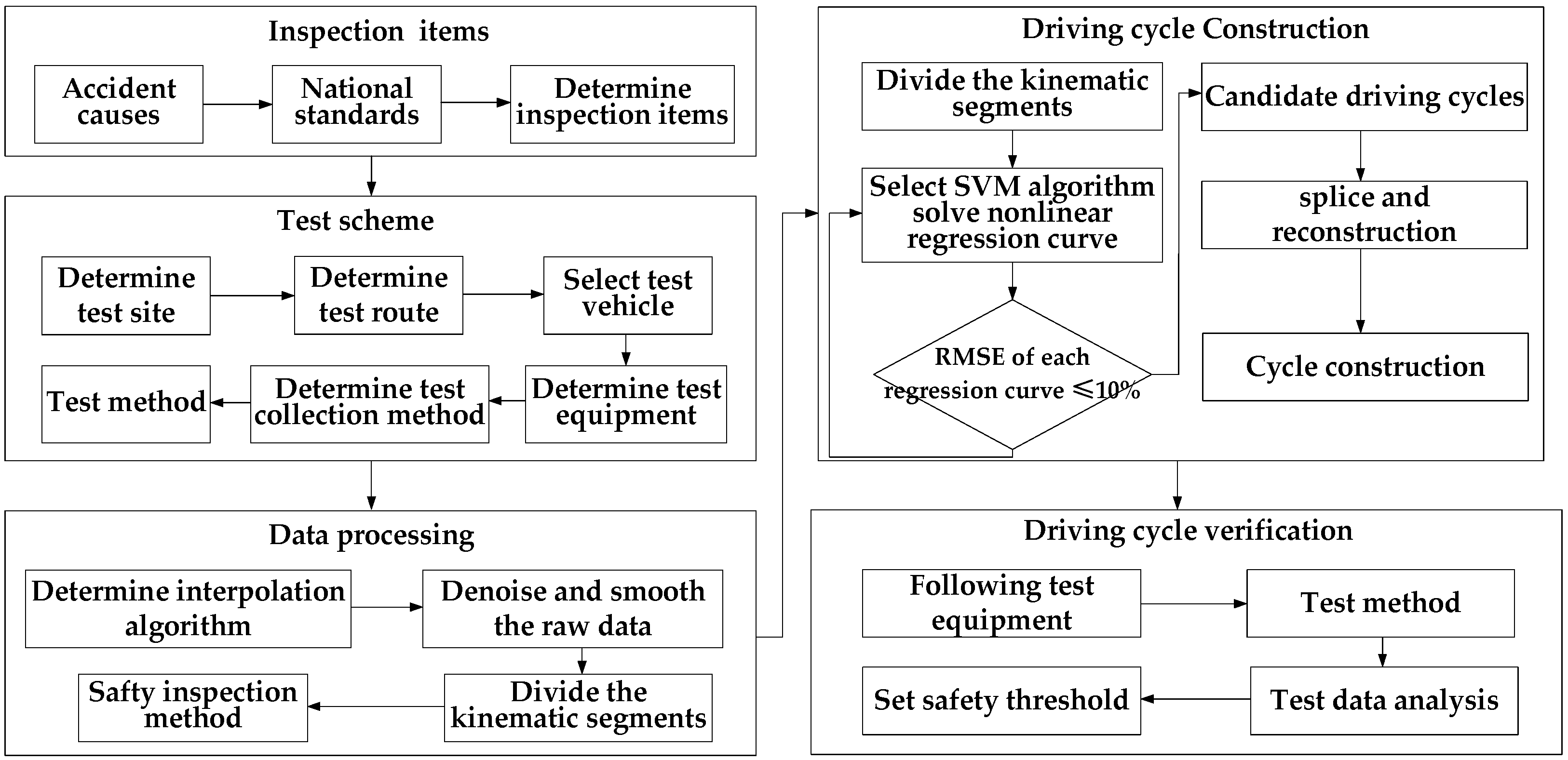
- We innovatively propose three inspection items according to the operational safety of national standards. Meanwhile, an inspection calculation method of operational safety is developed based on the acceleration changing rate.
- (2)
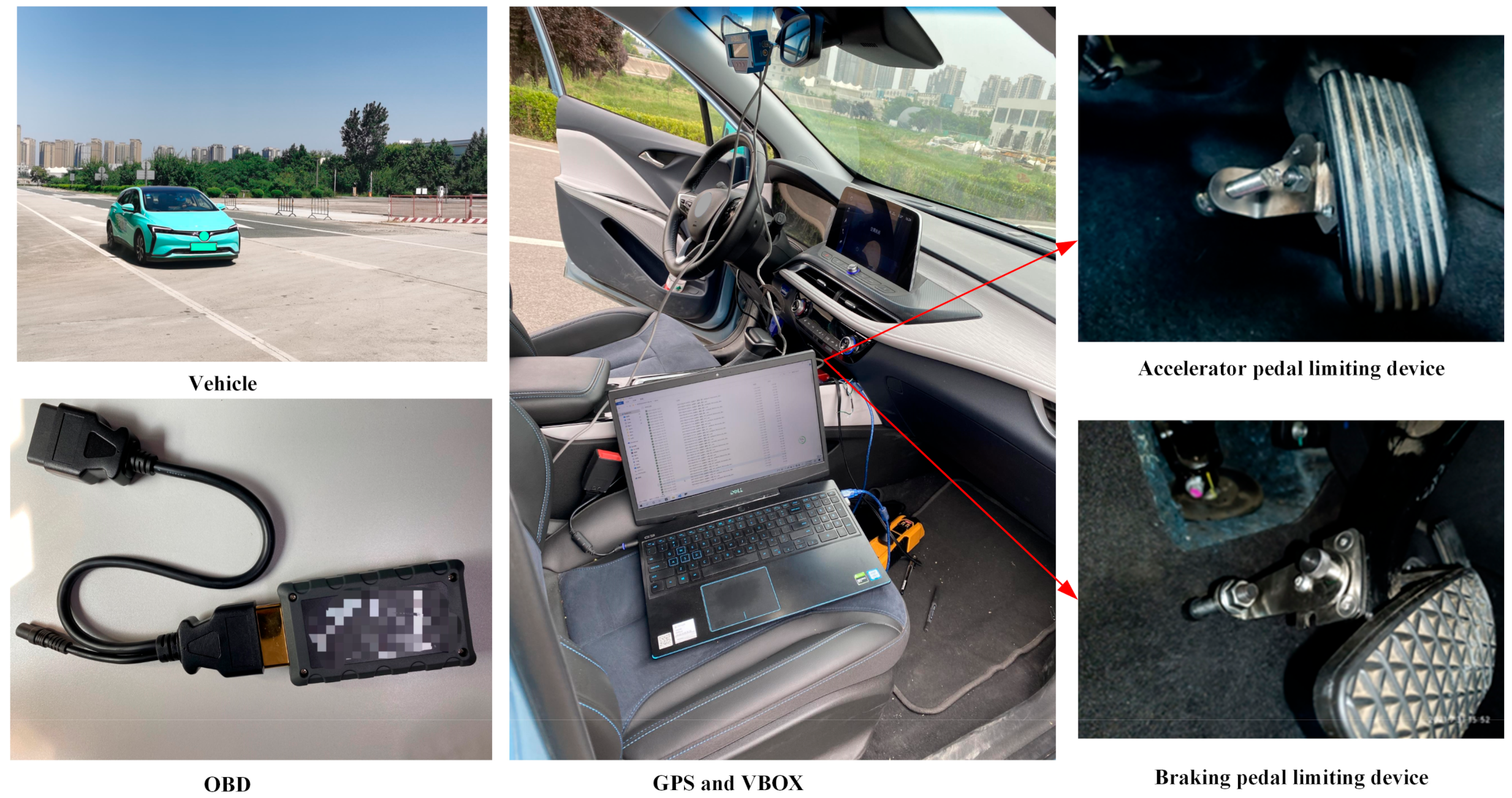
- The multi-cycle inspection method with the stable pedal mode is developed and collects sufficient driving data by OBD. Gauss filtering algorithm is applied for data preprocessing. The support vector machine is adopted to construct the rapid inspection driving cycle.
- (3)
- Validation of the developed rapid driving cycle on the test bench. The thresholds for gliding safety, driving safety, and braking safety are evaluated based on the test results.
2. Electric Vehicle Inspection Items
3. Test Scheme
3.1. Test Site and Route Selection
3.2. Data Collection and Test Method
4. Data Processing
5. Driving Cycle Construction
6. Driving Cycle Verification
7. Conclusions
- (1)
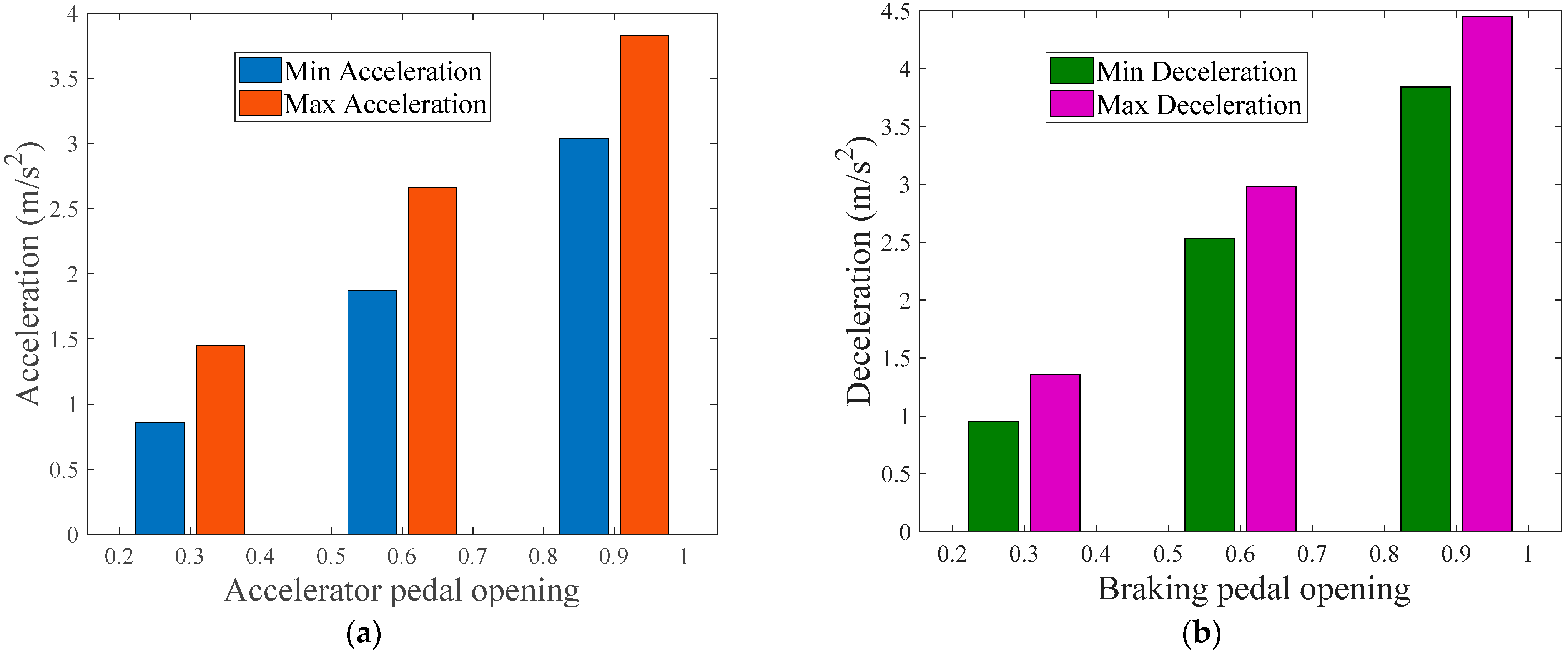
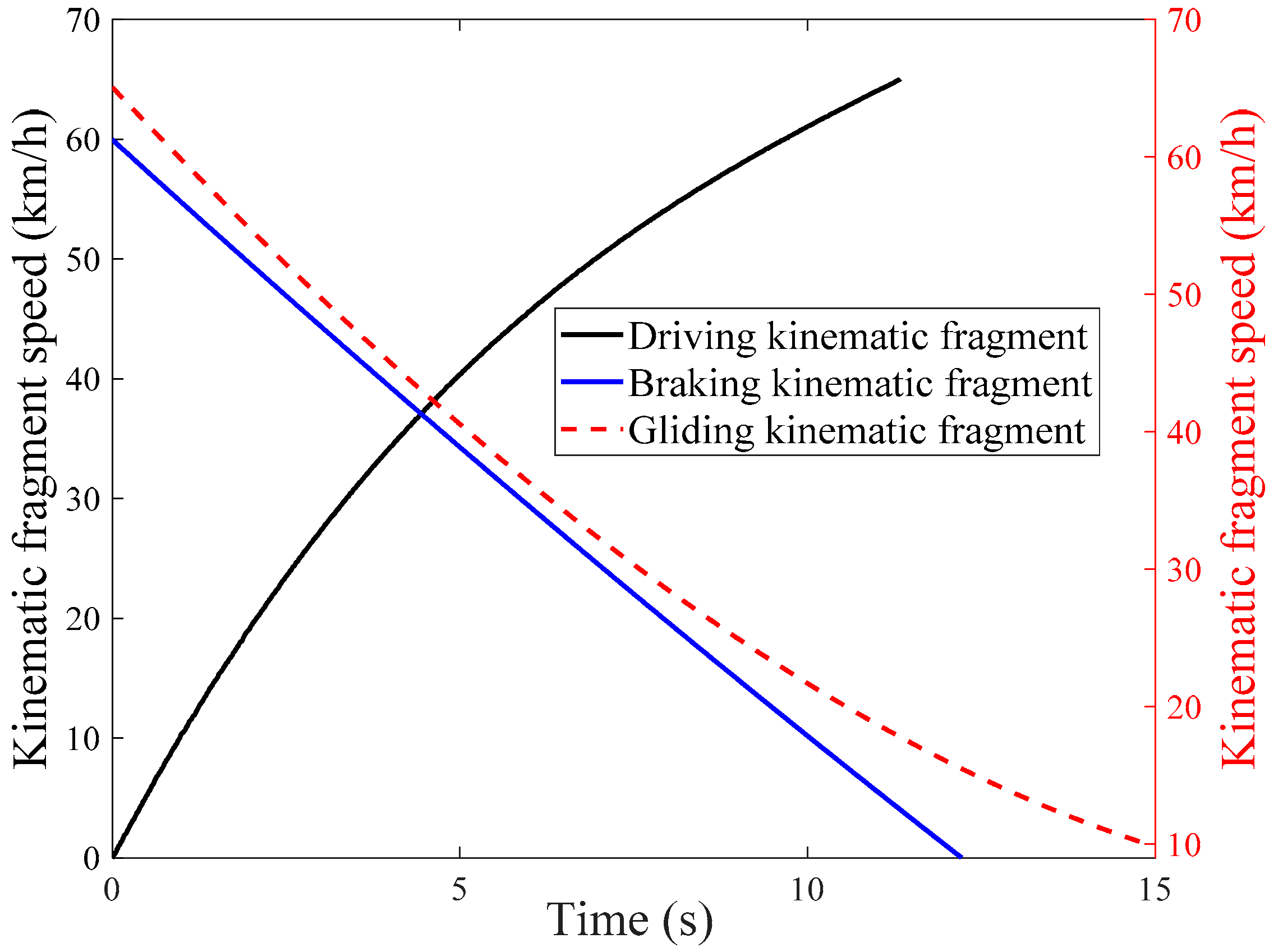
- According to the existing electric vehicles inspection methods and means, combined with the relevant standards for electric vehicles and the accident causes, the electric vehicle safety inspection items were identified, which included gliding comfort, driving stability, and braking coordination. Then, an acceleration changing rate was purposed as an items inspection method based on the identified inspection items. Using the basic theory of the driving cycle, the accelerator/brake pedal opening, acceleration, and velocity were selected as test parameters. Then, a multi-cycle operational safety test method was proposed with stable pedal mode and set several accelerator/braking cycle tests were set to obtain the operational safety test data.
- (2)
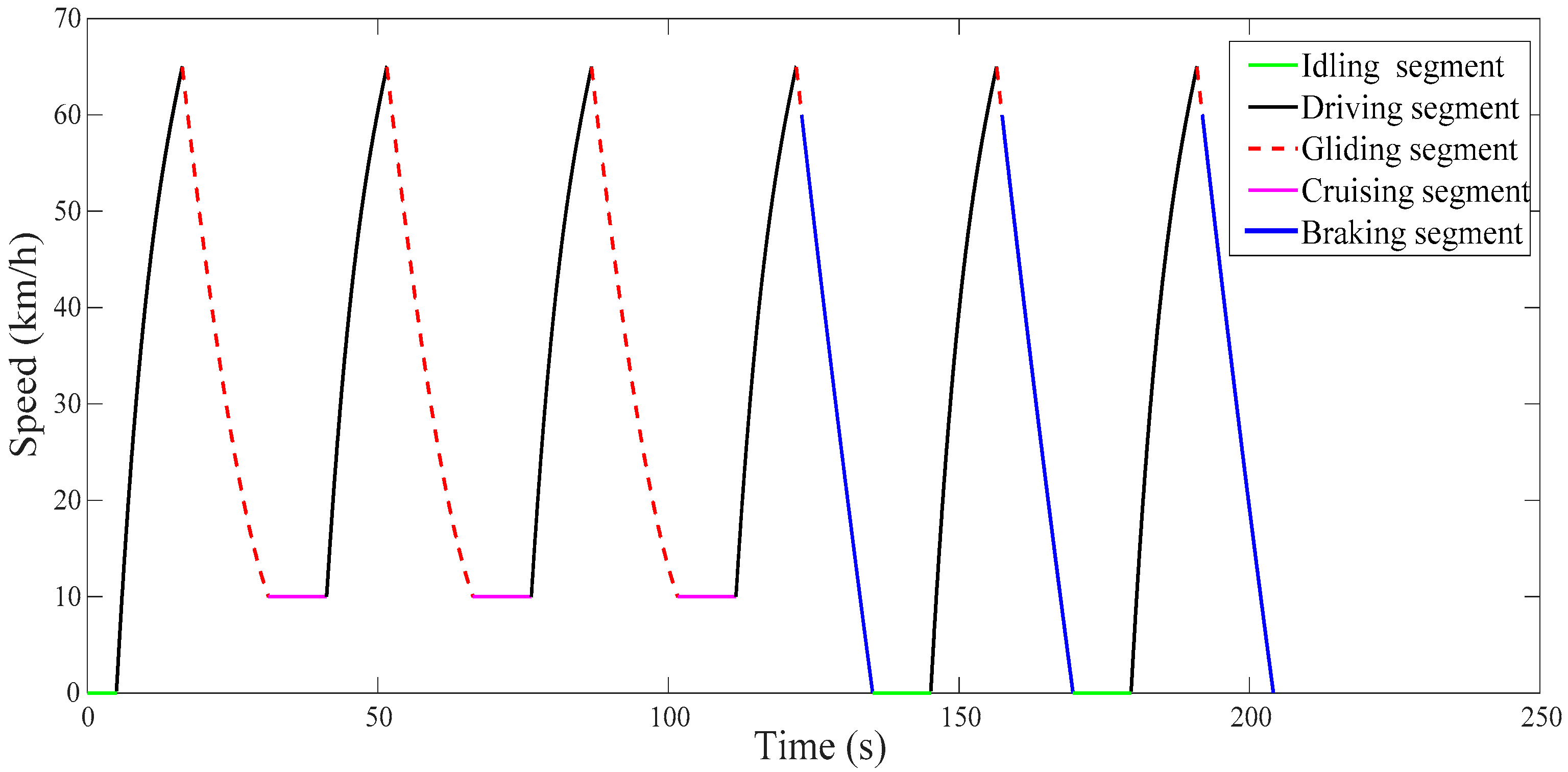
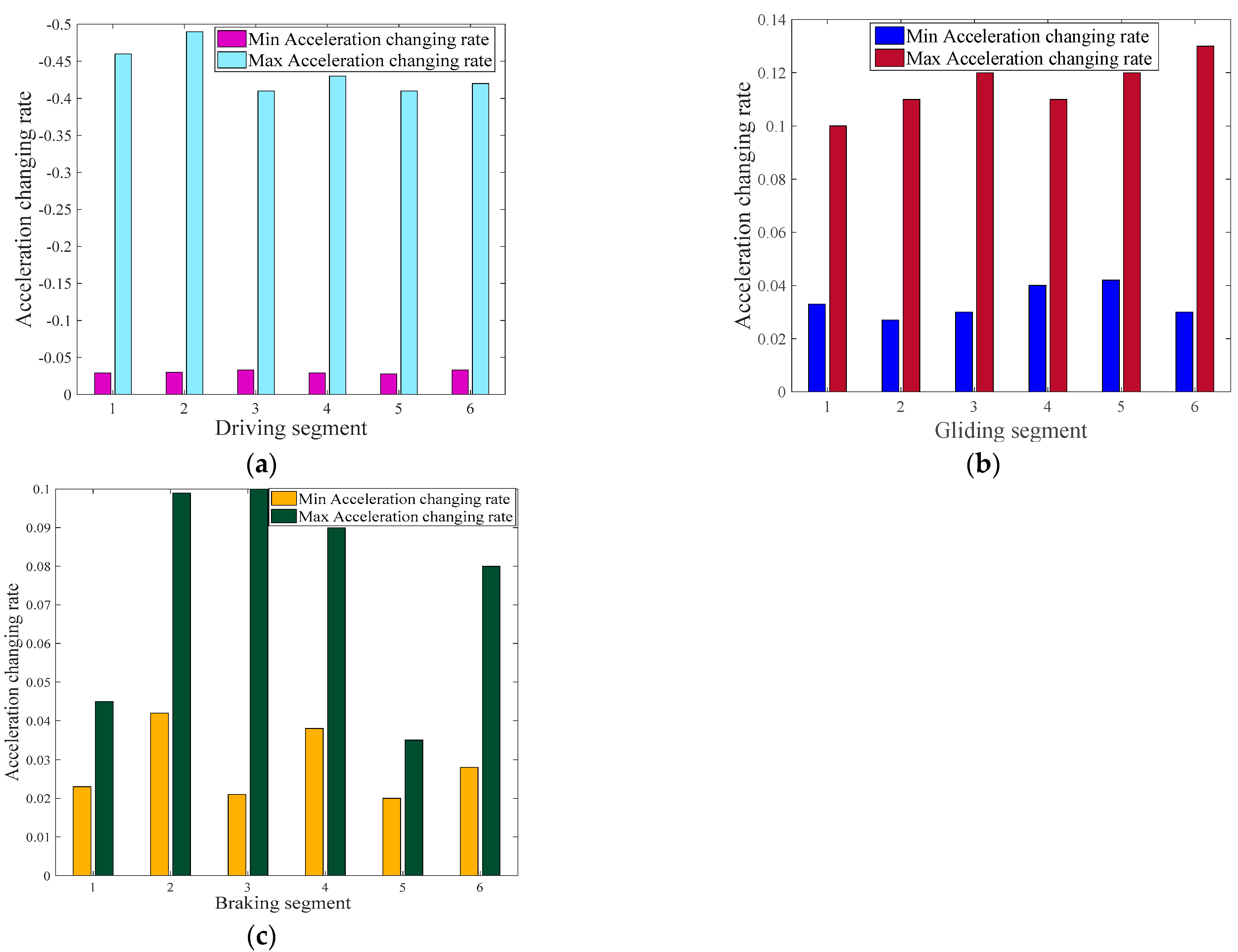
- Advanced filtering algorithms were used to remove burrs and duplicate data from the collected data. A support vector machine was used for regression cycles and fused with a spliced rapid inspection driving cycle with a total time of 204 s for electric vehicles. Then the range of three kinematic segments stability was determined. Finally, this rapid inspection driving cycle was verified on the testing bench. The verification results showed that the maximum driving acceleration changing rate error was 9%. The maximum tested driving acceleration changing rate error was 6%, and the maximum verification gliding acceleration changing rate error was 2.7%. The maximum tested gliding acceleration changing rate error was 4%, and the maximum verification braking acceleration changing rate error was 6.9%. The maximum tested braking acceleration changing rate error was 3.4%. All three inspection items had a good calculation effect. The safety thresholds for driving acceleration changing rate were less than 0.5, the gliding acceleration changing rate was less than 0.1, and the braking acceleration changing rate was less than 0.1.
- (3)
- A rapid inspection driving cycle was established for the operational safety of electric vehicles, which provided some technical support for the “annual inspection” of electric vehicles. However, there are also certain limitations. For example, there are many models of electric vehicles with widely varying braking strategies. A single driver and changing different drivers may increase the calculation error. Therefore, further analysis can be performed for different braking energy recovery strategies, different vehicles and multi-cycle following correction.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| FTP-75 | Federal Test Procedure-75 |
| ECO | Economical and Ecological |
| NEDC | New European Driving Cycle |
| VMAS | Vehicle Mass Analysis System |
| WLTC | World Light Vehicle Test Cycle |
| CLTC-P | China Light-Duty Vehicle Test Cycle-Passenger |
| GPS | Global Position System |
| OBD | On-Board Diagnosis |
| sliding time window | |
| velocity sampling interval | |
| acceleration | |
| acceleration changing rate | |
| SVM | Support Vector Machine |
| bias vector | |
| dot product | |
| parameter vector | |
| optimal function | |
| kernel function | |
| slack variable | |
| penalty coefficient | |
| insensitive coefficient | |
| RMSE | Root Mean Square Error |
| regression value | |
| true value |
References
- Du, J.; Ouyang, D. Progress of Chinese electric vehicles industrialization in 2015: A review. Appl. Energy 2017, 188, 529–546. [Google Scholar] [CrossRef]
- Palmer, K.; Tate, J.E.; Wadud, Z.; Nellthorp, J. Total cost of ownership and market share for hybrid and electric vehicles in the UK, US and Japan. Appl. Energy 2018, 209, 108–119. [Google Scholar] [CrossRef]
- Du, Z.; Lin, B.; Guan, C. Development path of electric vehicles in China under environmental and energy security constraints. Resour. Conserv. Recycl. 2019, 143, 17–26. [Google Scholar]
- Dong, F.; Liu, Y. Policy evolution and effect evaluation of new-energy vehicle industry in China. Resour. Policy 2020, 67, 101655. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, Q.; Liu, B.; McLellan, B.; Gao, Y.; Tang, Y. Substitution effect of New-Energy Vehicle Credit Program and Corporate Average Fuel Consumption Regulation for Green-car Subsidy. Energy 2018, 152, 223–236. [Google Scholar] [CrossRef]
- Wang, Z.; Dong, X. Determinants and policy implications of residents’ new energy vehicle purchases: The evidence from China. Nat. Hazards 2016, 82, 155–173. [Google Scholar] [CrossRef]
- Yi, F.; Lu, D.; Wang, X.; Pan, C.; Tao, Y.; Zhou, J.; Zhao, C. Energy Management Strategy for Hybrid Energy Storage Electric Vehicles Based on Pontryagin’s Minimum Principle Considering Battery Degradation. Sustainability 2022, 14, 1214. [Google Scholar] [CrossRef]
- Brady, J.; O’Mahony, M. Development of a driving cycle to evaluate the energy economy of electric vehicles in urban areas. Appl. Energy 2016, 177, 165–178. [Google Scholar] [CrossRef]
- Liu, X.; Ma, J.; Zhao, X.; Zhang, Y.; Zhang, K.; He, Y. Integrated Component Optimization and Energy Management for Plug-In Hybrid Electric Buses. Processes 2019, 7, 477. [Google Scholar] [CrossRef] [Green Version]
- Mayakuntla, S.K.; Verma, A. A novel methodology for construction of driving cycles for Indian cities. Transp. Res. Part D Transp. Environ. 2018, 65, 725–735. [Google Scholar] [CrossRef]
- Mersky, A.C.; Samaras, C. Fuel economy testing of autonomous vehicles. Transp. Res. Part C Emerg. Technol. 2016, 65, 31–48. [Google Scholar] [CrossRef]
- Tsai, J.-H.; Chiang, H.-L.; Hsu, Y.-C.; Peng, B.-J.; Hung, R.-F. Development of a local real world driving cycle for motorcycles for emission factor measurements. Atmos. Environ. 2005, 39, 6631–6641. [Google Scholar] [CrossRef]
- Berzi, L.; Delogu, M.; Pierini, M. Development of driving cycles for electric vehicles in the context of the city of Florence. Transp. Res. Part D Transp. Environ. 2016, 47, 299–322. [Google Scholar] [CrossRef]
- Hung, W.T.; Tong, H.Y.; Lee, C.; Ha, K.; Pao, L.Y. Development of a practical driving cycle construction methodology: A case study in Hong Kong. Transp. Res. Part D Transp. Environ. 2007, 12, 115–128. [Google Scholar] [CrossRef]
- Zhao, X.; Zhao, X.; Yu, Q.; Ye, Y.; Yu, M. Development of a representative urban driving cycle construction methodology for electric vehicles: A case study in Xi’an. Transp. Res. Part D Transp. Environ. 2020, 81, 102279. [Google Scholar] [CrossRef]
- Zhao, X.; Ye, Y.; Ma, J.; Shi, P.; Chen, H. Construction of electric vehicle driving cycle for studying electric vehicle energy consumption and equivalent emissions. Environ. Sci. Pollut. Res. 2020, 27, 37395–37409. [Google Scholar] [CrossRef]
- Shi, Q.; Zheng, Y.; Wang, R.; Li, Y. The study of a new method of driving cycles construction. Procedia Eng. 2011, 16, 79–87. [Google Scholar] [CrossRef] [Green Version]
- Shi, S.; Lin, N.; Zhang, Y.; Cheng, J.; Huang, C.; Liu, L.; Lu, B. Research on Markov property analysis of driving cycles and its application. Transp. Res. Part D Transp. Environ. 2016, 47, 171–181. [Google Scholar] [CrossRef]
- Jing, Z.; Wang, G.; Zhang, S.; Qiu, C. Building Tianjin driving cycle based on linear discriminant analysis. Transp. Res. Part D Transp. Environ. 2017, 53, 78–87. [Google Scholar] [CrossRef]
- Wang, Q.; Huo, H.; He, K.; Yao, Z.; Zhang, Q. Characterization of vehicle driving patterns and development of driving cycles in Chinese cities. Transp. Res. Part D Transp. Environ. 2008, 13, 289–297. [Google Scholar] [CrossRef]
- Peng, Y.; Zhuang, Y.; Yang, H. Development of a representative driving cycle for urban buses based on the k-means cluster method. Clust. Comput. 2018, 2, 1–10. [Google Scholar]
- Wang, L.; Ma, J.; Zhao, X.; Li, X. Development of a Typical Urban Driving Cycle for Battery Electric Vehicles Based on Kernel Principal Component Analysis and Random Forest. IEEE Access 2021, 9, 15053–15065. [Google Scholar] [CrossRef]
- Lai, J.; Yu, L.; Song, G.; Guo, P.; Chen, X. Development of City-Specific Driving Cycles for Transit Buses Based on VSP Distributions: Case of Beijing. J. Transp. Eng. 2013, 139, 749–757. [Google Scholar] [CrossRef]
- Nesamani, K.; Subramanian, K. Development of a driving cycle for intra-city buses in Chennai, India. Atmos. Environ. 2011, 45, 5469–5476. [Google Scholar] [CrossRef]
- Shim, B.J.; Park, K.S.; Koo, J.M.; Jin, S.H. Work and speed based engine operation condition analysis for new European driving cycle (NEDC). J. Mech. Sci. Technol. 2014, 28, 755–761. [Google Scholar] [CrossRef]
- Zhang, X.; Liu, F.; Cai, F.; Dong, G.; Liu, J. Research on Influencing Factors on Errors of Vehicle Fuel Consumption Measured by Carbon Balance Method Based on VMAS. J. Highw. Transp. Res. Dev. 2012, 6, 84–88. [Google Scholar] [CrossRef]
- Wang, M.; Jin, B.; Li, S. Study on Emission Limits under VMAS for In-use Vehicles in Zhengzhou. Environ. Sci. Technol. 2019, 42, 214–220. [Google Scholar]
- Kang, Y.; Duan, B.; Zhou, Z.; Shang, Y.; Zhang, C. Online multi-fault detection and diagnosis for battery packs in electric vehicles. Appl. Energy 2020, 259, 114170. [Google Scholar] [CrossRef]
- Feng, X.; Weng, C.; Ouyang, M.; Sun, J. Online internal short circuit detection for a large format lithium ion battery. Appl. Energy 2016, 161, 168–180. [Google Scholar] [CrossRef] [Green Version]
- Xia, B.; Mi, C. A fault-tolerant voltage measurement method for series connected battery packs. J. Power Sources 2016, 308, 83–96. [Google Scholar] [CrossRef]
- Ho, S.; Wong, Y.; Chang, W. Developing Singapore Driving Cycle for passenger cars to estimate fuel consumption and vehicular emissions. Atmos. Environ. 2014, 97, 353–362. [Google Scholar] [CrossRef]
- Yu, Z.; Shi, S.; Wang, S.; Mu, Y.; Li, W.; Xu, C.; Zhang, M. Statistical inference-based research on sampling time of vehicle driving cycle experiments. Transp. Res. Part D Transp. Environ. 2017, 54, 114–141. [Google Scholar] [CrossRef]
- Arun, N.; Mahesh, S.; Ramadurai, G.; Nagendra, S.S. Development of driving cycles for passenger cars and motorcycles in Chennai, India. Sustain. Cities Soc. 2017, 32, 508–512. [Google Scholar] [CrossRef]
- Wang, Y.; Fujimoto, H.; Hara, S. Driving Force Distribution and Control for EV With Four In-Wheel Motors: A Case Study of Acceleration on Split-Friction Surfaces. IEEE Trans. Ind. Electron. 2017, 64, 3380–3388. [Google Scholar] [CrossRef]
- Tian, H.; Li, A.; Li, X. SOC estimation of lithium-ion batteries for electric vehicles based on multimode ensemble SVR. J. Power Electron. 2021, 21, 1365–1373. [Google Scholar] [CrossRef]
- Lu, J.; Zhang, Z.; Wu, Z.Q. Prediction of Surface Roughness for Compacted Graphite Cast Iron Based on Support Vector Machine. Surf. Technol. 2020, 49, 350–357. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Standard | Test Content | Testing Significance | Testing Indicator |
|---|---|---|---|
| GB21670-2008 | Technical requirements and testing methods for passenger car braking systems | Test the abnormal braking systems performance | Braking time and average deceleration |
| GB/T12543-2009 | Acceleration performance test methods for motor vehicle | Test the abnormal acceleration performance | Coefficient of variation of velocity |
| GB/T18385-2005 | Electric vehicles power performance test methods | Test the abnormal acceleration performance of electric vehicles | The arithmetic square root of acceleration time |
| QC/T 1089-2017 | Requirements and test methods for regenerative braking systems in electric vehicles | Test the abnormal braking systems performance of electric vehicles | Coefficient of variation of mean fully developed deceleration |
| GB 38900-2020 | Items and methods for safety technology inspection of motor vehicles | Regulation of motor vehicle safety technology inspection | Different tests, different indicators |
| Parameter | Symbol | Value | Unit |
|---|---|---|---|
| Curb weight | 1580 | Kg | |
| Wheelbase | 2660 | mm | |
| Vehicle body height | 1510 | mm | |
| Maximum speed | 150 | km/h | |
| Motor rated power | 110 | kW | |
| Motor peak power | 135 | kW | |
| Motor rated torque | 350 | Nm | |
| Motor rated speed | 4000 | rpm | |
| Motor peak torque | 350 | Nm | |
| Motor peak speed | 7500 | rpm | |
| Motor Maximum efficiency | 96 | % | |
| Battery capacity | 52.5 | kWh | |
| Battery discharge depth | 80 | % | |
| Nominal driving range | 410 | km | |
| Nominal energy consumption | 13.1 | kWh/100 km |
| Kinematic Segments | The Qualified Range of Stability | The Tested Range of Stability | The RMSE between the Qualified and Tested Results | The RMSE between the Tested Results |
|---|---|---|---|---|
| driving segment | [−0.35, −0.04] | [−0.49, −0.03] | 9% | 6% |
| gliding segment | [0.05, 0.09] | [0.03, 0.13] | 2.7% | 4% |
| braking segment | [−0.04, 0.095] | [0.02, 0.1] | 6.9% | 3.4% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiao, Z.; Ma, J.; Zhao, X.; Zhang, K.; Meng, D.; Li, X. Development of a Rapid Inspection Driving Cycle for Battery Electric Vehicles Based on Operational Safety. Sustainability 2022, 14, 5079. https://doi.org/10.3390/su14095079
Jiao Z, Ma J, Zhao X, Zhang K, Meng D, Li X. Development of a Rapid Inspection Driving Cycle for Battery Electric Vehicles Based on Operational Safety. Sustainability. 2022; 14(9):5079. https://doi.org/10.3390/su14095079
Chicago/Turabian StyleJiao, Zhipeng, Jian Ma, Xuan Zhao, Kai Zhang, Dean Meng, and Xuebo Li. 2022. "Development of a Rapid Inspection Driving Cycle for Battery Electric Vehicles Based on Operational Safety" Sustainability 14, no. 9: 5079. https://doi.org/10.3390/su14095079
APA StyleJiao, Z., Ma, J., Zhao, X., Zhang, K., Meng, D., & Li, X. (2022). Development of a Rapid Inspection Driving Cycle for Battery Electric Vehicles Based on Operational Safety. Sustainability, 14(9), 5079. https://doi.org/10.3390/su14095079