
Electric Vehicle Charging Station Location Model considering Charging Choice Behavior and Range Anxiety


Abstract
:1. Introduction
2. Problem Statement
2.1. Charging Selection Behavior Based on Cumulative Prospect Theory
2.2. Analysis of Driver’s Range Anxiety and Charging Selection
2.3. Feasibility Analysis of Electric Vehicle Path
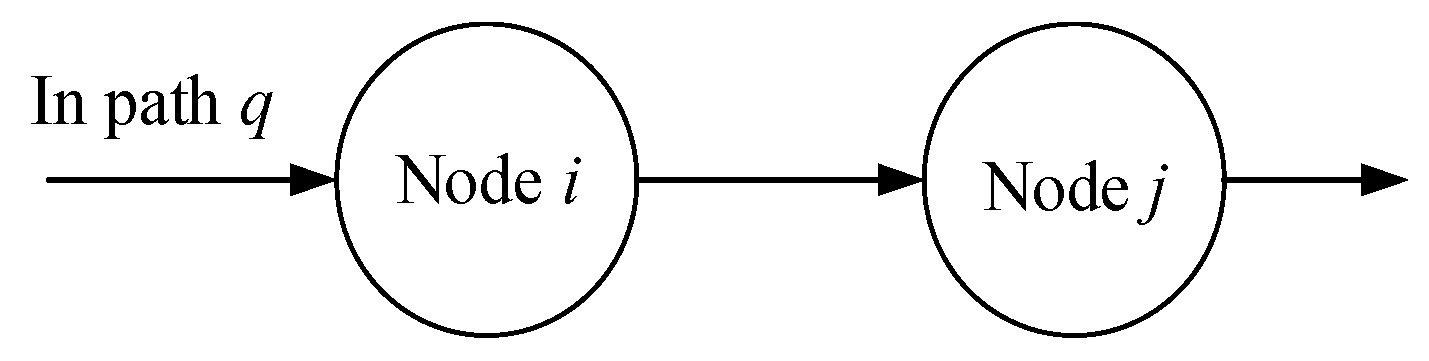
- If the vehicle can reach node i, this means that there is still range left when the vehicle arrives (or that the vehicle runs out of electricity when it arrives), as shown in Equation (5):
- If a charging station is not built at node i, the driver cannot charge here; if a charging station is built at node i, according to the charging selection behavior model, the driver will make a charging selection at this node, as shown in Equations (6) and (7):
- The remaining range of the vehicle arriving at node j is the remaining range rj of the vehicle at node i plus the increased mileage of the vehicle charging at node i, minus the distance between node i and node j, as shown in Equation (8):
- In the medium- and long-distance travel in the expressway network, the electric vehicle has less opportunity to charge than in the city, and the driver often recharges the vehicle when possible, so this paper assumes that if the vehicle is charged, it will be charged to DR. The increased mileage ci of the vehicle charged at node i is shown in Equation (9):
- If , this means that when the vehicle reaches node j, the vehicle still has remaining range and can move on. On path q, if is known to satisfy for any node i, this means that the OD trip is feasible; that is, . If means that the vehicle cannot reach the next node j, it also means that the OD travel is not feasible; that is, . There are many reasons for the infeasibility of OD travel, such as unreasonable layout of charging stations, faulty charging choices for drivers, long road distances exceeding the total range of electric vehicles, etc. If path q is not feasible, for the compactness of the model, a difference variable is introduced to represent the amount of electricity that needs to be replenished from node i to node j, in addition to the normal power supply. If in path q, then the OD is not feasible for q. At this point, there is Equation (10):When OD is feasible for q, the above formula still holds, but .
- The cumulated range anxiety (CRA) of electric vehicle drivers between all OD pairs in the road network can be calculated by Equation (11):
3. Model Building
3.1. Symbols and Decision Variables
3.2. Construction of the Charging Station Location Model
4. Solving Algorithm
5. Model Verification
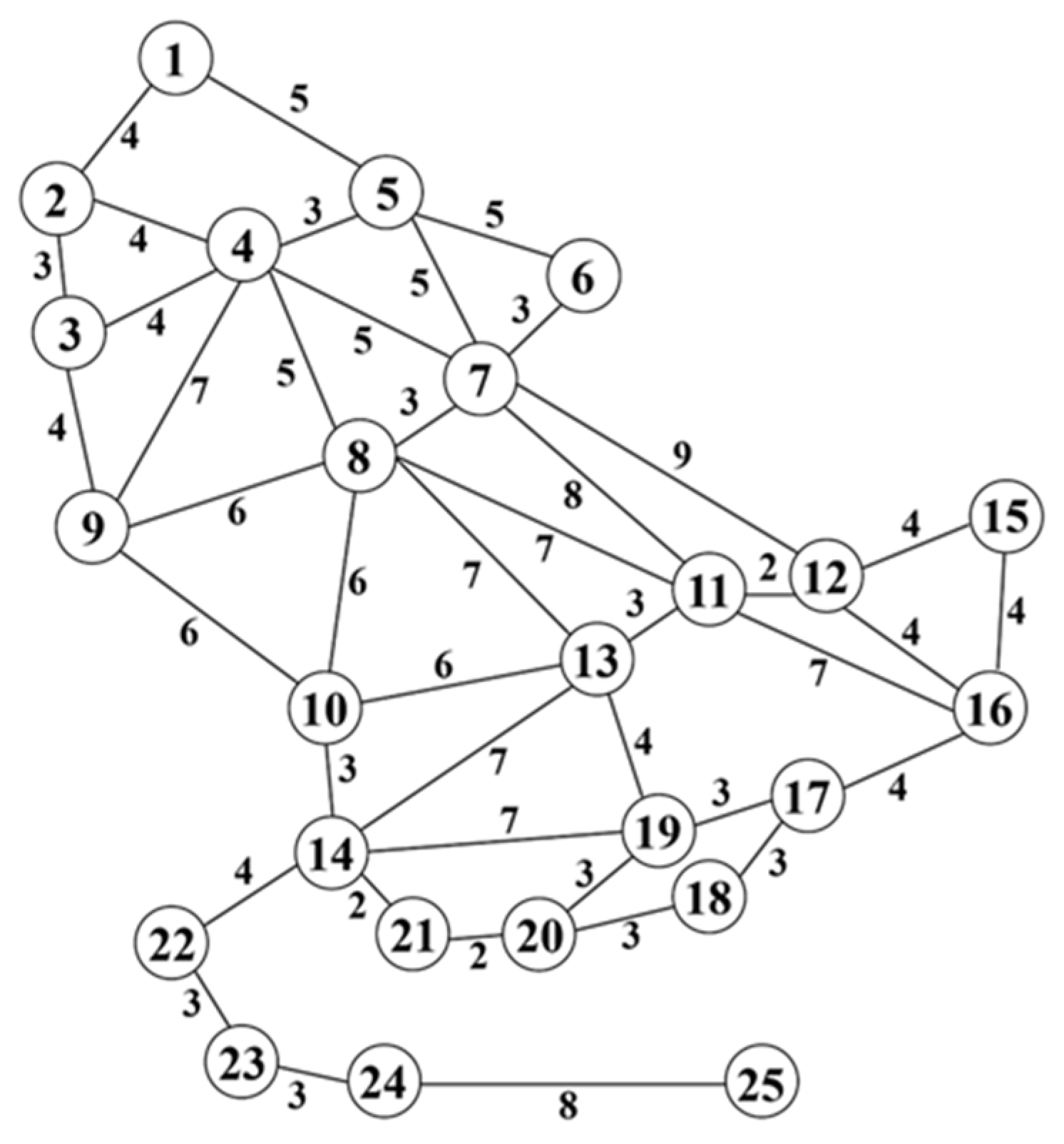
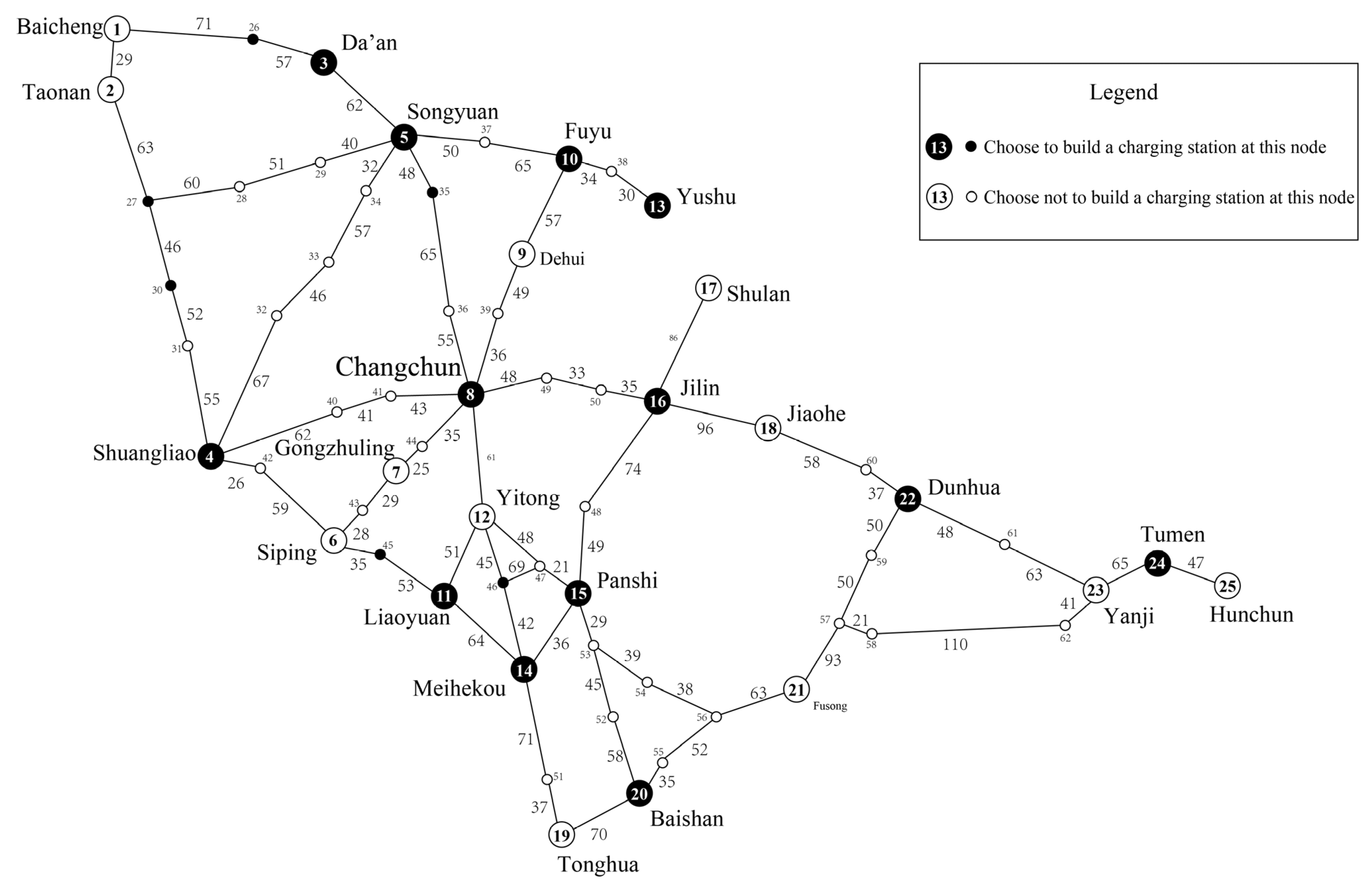
5.1. Example Description
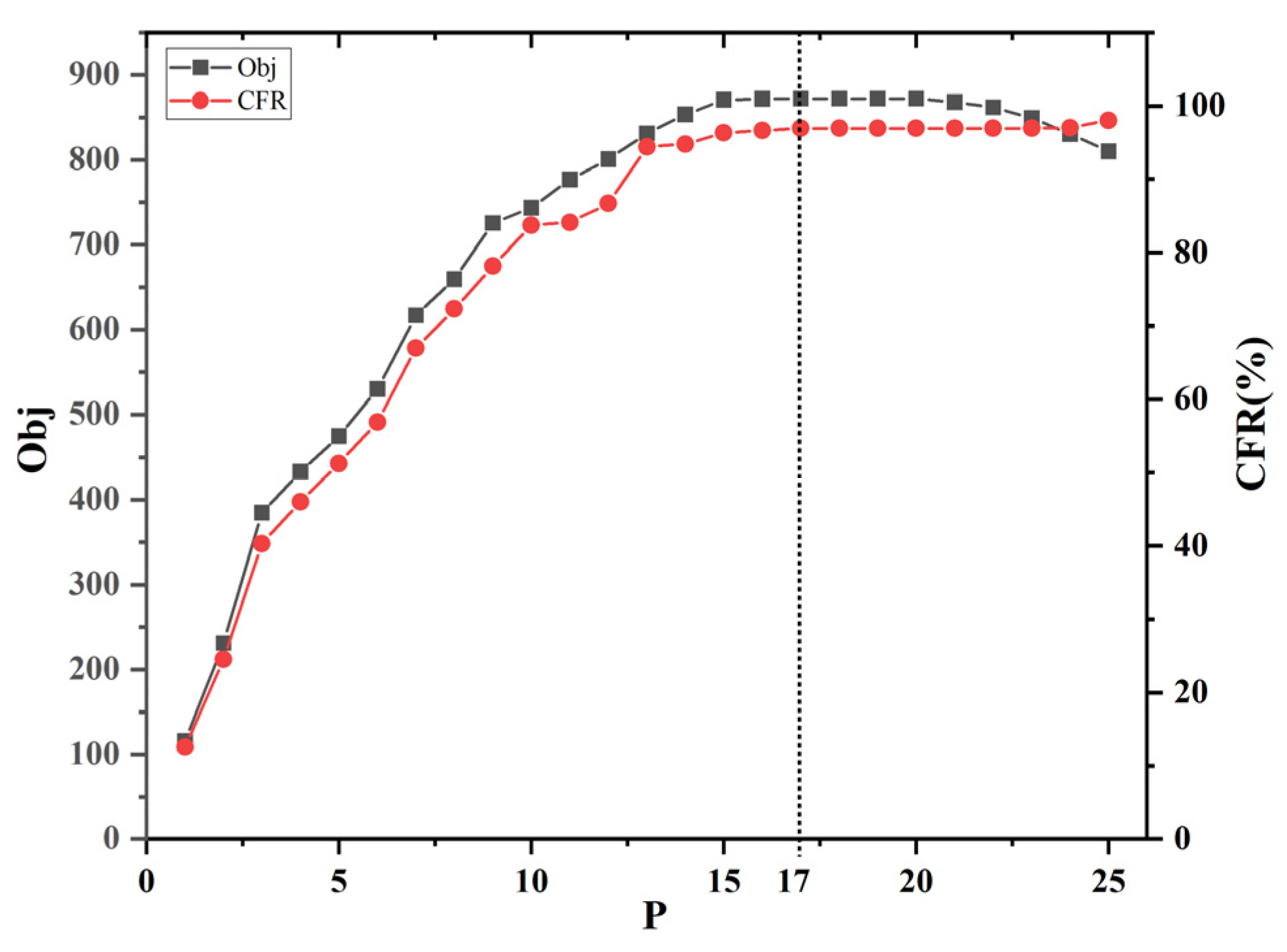
5.2. Solution Result
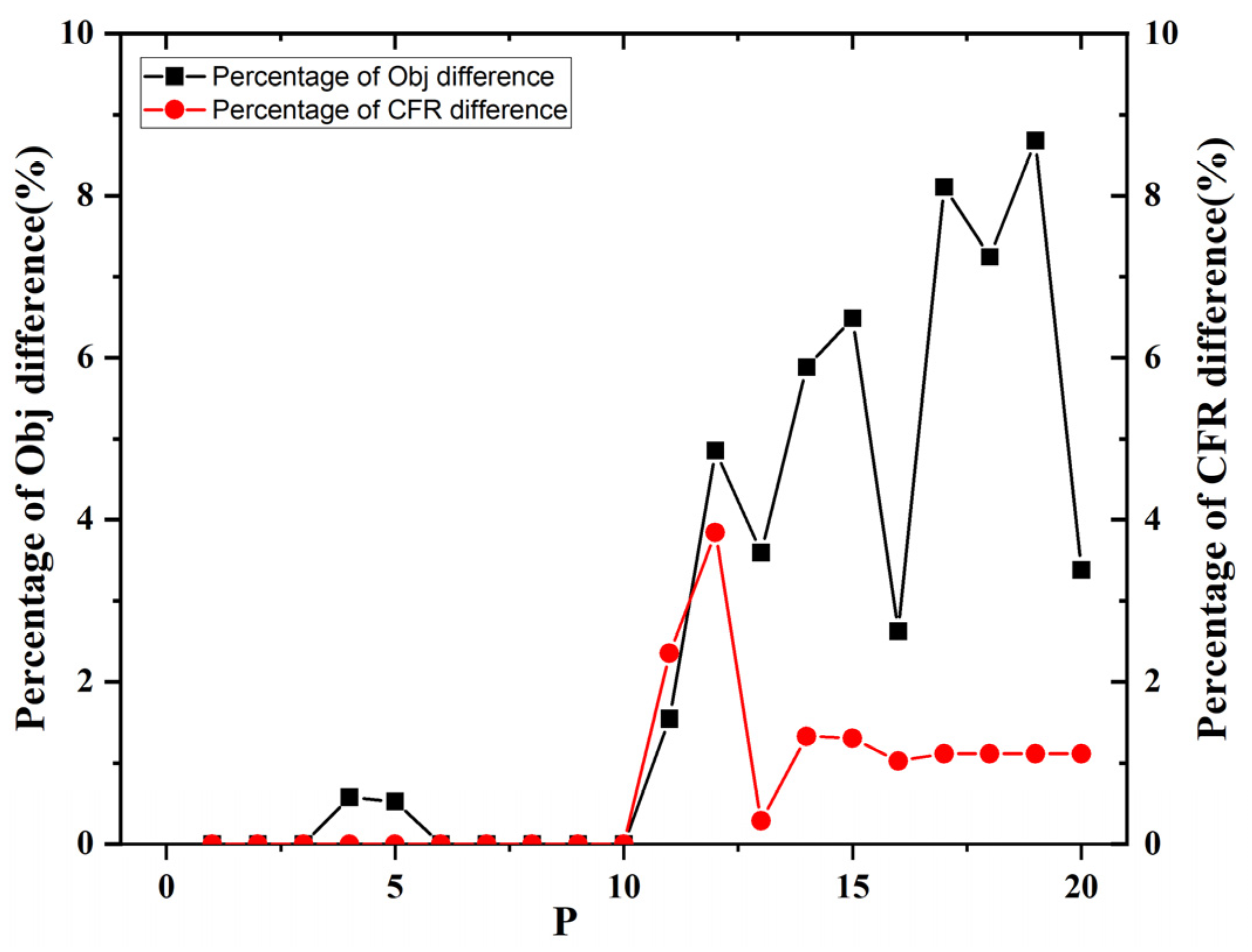
5.3. Comparative Analysis of Results
5.3.1. The Influence of Drivers’ Range Anxiety on Location Selection
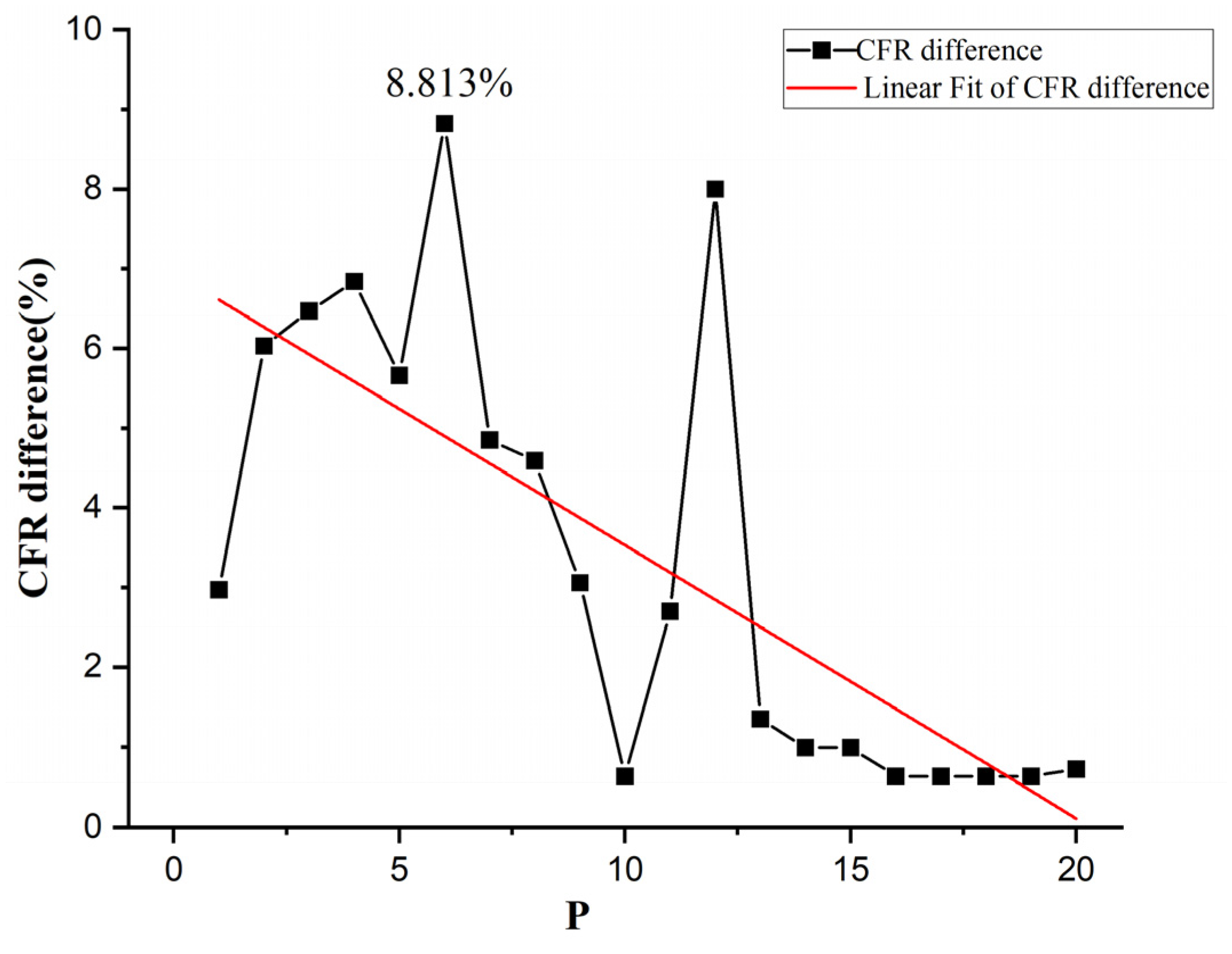
5.3.2. The Influence of Charging Selection Behavior on Location Selection
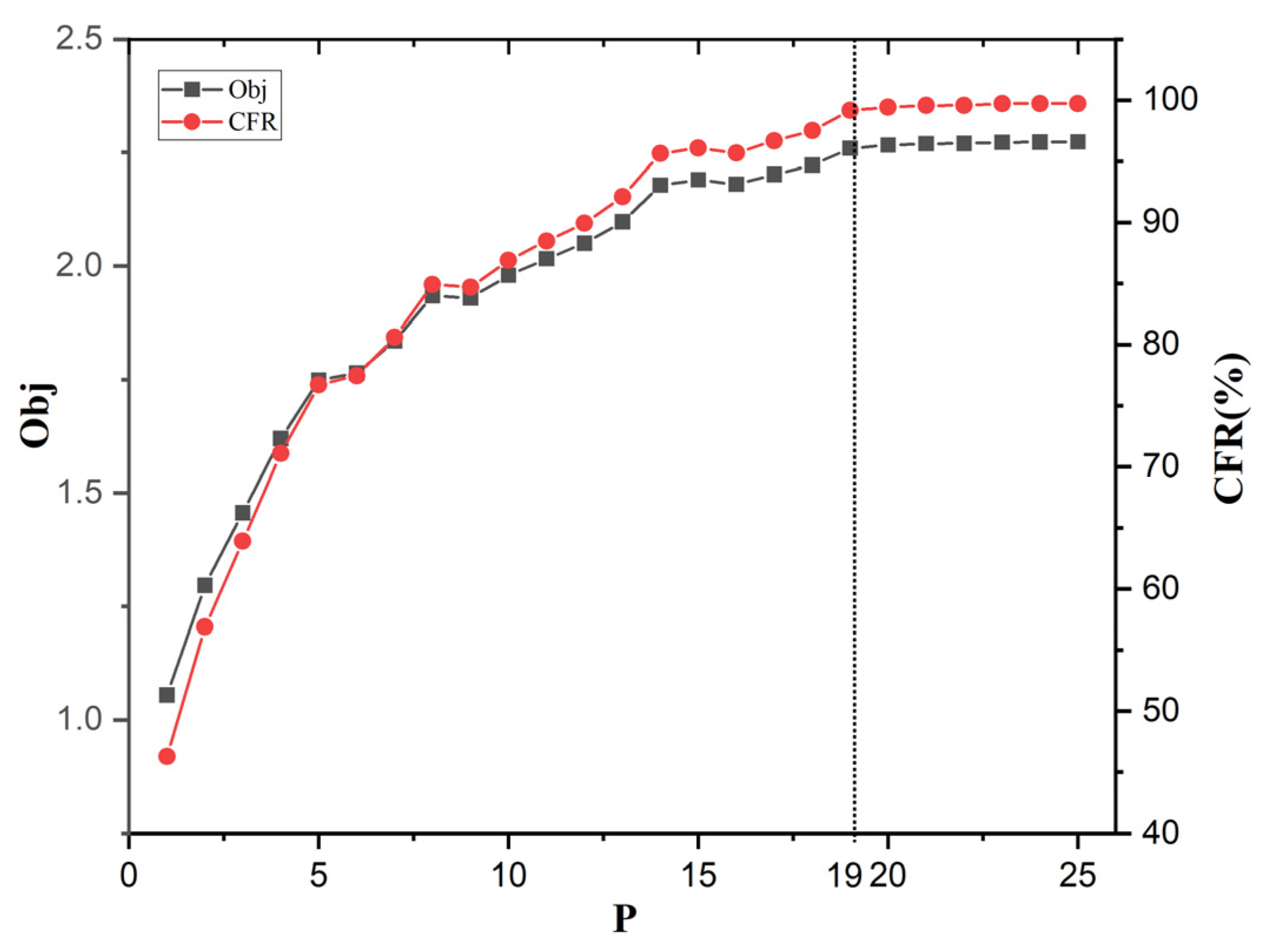
5.4. Empirical Analysis
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Egbue, O.; Long, S. Barriers to widespread adoption of electric vehicles: An analysis of consumer attitudes and perceptions. Energy Policy 2012, 48, 717–729. [Google Scholar] [CrossRef]
- Hodgson, M. A flow-capturing location—Allocation model. Geogr. Anal. 1990, 22, 270–279. [Google Scholar] [CrossRef]
- Kuby, M.; Lim, S. The flow-refueling location problem for alternative-fuel vehicles. Soc.–Econ. Plan. Sci. 2005, 39, 125–145. [Google Scholar] [CrossRef]
- Kuby, M.; Lim, S. Location of alternative-fuel stations using the flow-refueling location model and dispersion of candidate sites on arcs. Netw. Spat. Econ. 2007, 7, 129–152. [Google Scholar] [CrossRef]
- Kim, J.; Kuby, M. The deviation-flow refueling location model for optimizing a network of refueling stations. Int. J. Hydrog. Energy 2012, 37, 5406–5420. [Google Scholar] [CrossRef]
- Guo, F.; Yang, J.; Lu, J. The battery charging station location problem: Impact of users’ range anxiety and distance convenience. Transp. Res. Part E-Logist. Transp. Rev. 2018, 114, 1–18. [Google Scholar] [CrossRef]
- Chung, S.H.; Kwon, C. Multi-period planning for electric car charging station locations: A case of Korean Expressways. Eur. J. Oper. Res. 2015, 242, 677–687. [Google Scholar] [CrossRef]
- Capar, I.; Kuby, M.; Leon, V.J.; Tsai, Y.J. An arc cover-path-cover formulation and strategic analysis of alternative-fuel station locations. Eur. J. Oper. Res. 2013, 227, 142–151. [Google Scholar] [CrossRef]
- Xu, M.; Yang, H.; Wang, S. Mitigate the range anxiety: Siting battery charging stations for electric vehicle drivers. Transp. Res. Part C-Emerg. Technol. 2020, 114, 164–188. [Google Scholar] [CrossRef]
- Zhu, Z. Charging Station Location Problem of Electric Vehicles. Ph.D. Thesis, Beijing Jiaotong University, Beijing, China, 2018. [Google Scholar]
- Gao, S.; Frejinger, E.; Ben-Akiva, M. Adaptive route choices in risky traffic networks: A prospect theory approach. Transp. Res. Part C-Emerg. Technol. 2010, 18, 727–740. [Google Scholar] [CrossRef]
- Schwanen, T.; Ettema, D. Coping with unreliable transportation when collecting children: Examining parents’ behavior with cumulative prospect theory. Transp. Res. Part A-Policy Pract. 2009, 43, 511–525. [Google Scholar] [CrossRef]
- Xu, H.; Zhou, J.; Xu, W. A decision-making rule for modeling travelers’ route choice behavior based on cumulative prospect theory. Transp. Res. Part C-Emerg. Technol. 2011, 19, 218–228. [Google Scholar] [CrossRef]
- Hu, L.; Dong, J.; Lin, Z. Modeling charging behavior of battery electric vehicle drivers: A cumulative prospect theory based approach. Transp. Res. Part C-Emerg. Technol. 2019, 102, 474–489. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J. Modeling and Analyzing of Driving Mileage of Electric Vehicle Based on Data-driven. Master’s Thesis, Beijing Jiaotong University, Beijing, China, 2015. [Google Scholar]
- Xu, M.; Meng, Q.; Liu, K.; Yamamoto, T. Joint charging mode and location choice model for battery electric vehicle users. Transp. Res. Part B-Methodol. 2017, 103, 68–86. [Google Scholar] [CrossRef]
- Yang, Y.; Yao, E.; Yang, Z.; Zhang, R. Modeling the charging and route choice behavior of BEV drivers. Transp. Res. Part C-Emerg. Technol. 2016, 65, 190–204. [Google Scholar] [CrossRef]
- Franke, T.; Neumann, I.; Buhler, F.; Cocron, P.; Krems, J.F. Experiencing Range in an Electric Vehicle: Understanding Psychological Barriers. Appl. Psychol.-Int. Rev.-Psychol. Appl.-Rev. Int. 2012, 61, 368–391. [Google Scholar] [CrossRef]
- Wang, Y.; Lin, C. Locating road-vehicle refueling stations. Transp. Res. Part E-Logist. Transp. Rev. 2009, 45, 821–829. [Google Scholar] [CrossRef]
- David, S.; Oded, B. A Heuristic Algorithm for the Traveling Salesman Location Problem on Networks. Oper. Res. 1988, 36, 377–513. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Symbol | Parameter Description | Parameter Unit |
|---|---|---|
| G | An expressway network G = (N,A) | / |
| N | A collection of nodes in an expressway network, which is composed of N nodes. | / |
| A | Collection of road sections in an expressway network | / |
| i,j | Nodes i and j in an expressway network, | / |
| (i,j) | The section of an expressway network from node i to node j, | / |
| lij | The distance between road sections (i,j) | km |
| Q | The set of OD pairs in an expressway network | / |
| q | Arbitrary OD pairs in an expressway network, | / |
| r(q) | The start and end nodes of path q | / |
| s(q) | The termination node of path q | / |
| Nq | In an expressway network, the set of all nodes on path q | / |
| Aq | In an expressway network, the collection of all road sections on path q | / |
| Eq | In an expressway network, the collection of all charging stations on path q | / |
| fq | Traffic flow on path q in an expressway network | / |
| DR | Total range of electric vehicles | km |
| EO | The remaining range of the electric vehicle at the starting node | km |
| ED | The remaining range of the electric vehicle at the termination node | km |
| In path q, the remaining range when the electric vehicle reaches node i is expressed by | km | |
| In path q, the driver of the electric vehicle estimates the remaining range of the next charging station at node i, expressed by | km | |
| In path q, the mileage increased by the charging of the electric vehicle at node i | km | |
| P | Number of planned charging stations on an expressway network | pcs |
| P | Obj | CFR (%) | Location Result |
|---|---|---|---|
| 1 | 116.25 | 12.59 | 20 |
| 2 | 231.38 | 24.55 | 14,23 |
| 3 | 384.50 | 40.29 | 14,18,23 |
| 4 | 433.00 | 46.04 | 14,18,22,23 |
| 5 | 475.00 | 51.26 | 14,16,18,22,23 |
| 6 | 530.13 | 56.92 | 4,8,10,14,18,23 |
| 7 | 616.88 | 67.00 | 4,8,10,18,21,22,24 |
| 8 | 659.75 | 72.30 | 4,8,10,16,18,21,22,24 |
| 9 | 725.38 | 78.15 | 3,4,8,9,10,18,21,22,24 |
| 10 | 743.38 | 83.72 | 2,4,8,9,10,16,18,21,22,23 |
| 11 | 776.88 | 84.08 | 3,4,8,9,10,15,16,18,21,22,23 |
| 12 | 801.00 | 86.69 | 3,4,8,9,10,11,15,16,18,21,22,23 |
| 13 | 831.25 | 94.42 | 3,4,8,9,10,11,13,14,16,17,20,22,24 |
| 14 | 853.50 | 94.78 | 3,4,8,9,10,11,13,14,16,18,19,21,22,23 |
| 15 | 870.88 | 96.31 | 3,4,8,9,10,11,13,14,15,16,18,19,21,22,23 |
| 16 | 871.88 | 96.67 | 3,4,7,8,9,10,11,13,14,15,16,18,19,20,22,23 |
| 17 | 872.00 | 96.94 | 1,3,4,7,8,9,10,11,13,14,15,16,18,19,20,22,23 |
| 18 | 872.00 | 96.94 | 1,3,4,6,7,8,9,10,11,13,14,15,16,18,19,21,22,23 |
| 19 | 872.00 | 96.94 | 1,3,4,6,7,8,9,10,11,13,14,15,16,18,19,21,22,23,24 |
| 20 | 872.00 | 96.94 | 1,3,4,6,7,8,9,10,11,13,14,15,16,18,19,21,22,23,24,25 |
| 21 | 868.20 | 96.94 | 1,2,3,4,6,7,8,9,10,11,13,14,15,16,18,19,21,22,23,24,25 |
| 22 | 862.00 | 96.94 | 1,2,3,4,6,7,8,9,10,11,12,13,14,15,16,18,19,21,22,23,24,25 |
| 23 | 849.50 | 96.94 | 1,2,3,4,6,7,8,9,10,11,12,13,14,15,16,18,19,20,21,22,23,24,25 |
| 24 | 830.40 | 97.03 | 1,2,3,4,5,6,7,8,9,10,11,12,13,14,15,16,18,19,20,21,22,23,24,25 |
| 25 | 810.00 | 98.02 | 1,2,3,4,5,6,7,8,9,10,11,12,13,14,15,16,17,18,19,20,21,22,23,24,25 |
| P | Obj | CFR (%) | Model 1 Location Result | P | Obj* | CFR (%) | Location Result of the Maximum Flow Model | Number of Location Differences |
|---|---|---|---|---|---|---|---|---|
| 1 | 116.3 | 12.59 | 20 | 1 | 116.3 | 12.59 | 20 | 0 |
| 2 | 231.4 | 24.55 | 14,23 | 2 | 231.4 | 24.55 | 14,23 | 0 |
| 3 | 384.5 | 40.29 | 14,18,23 | 3 | 384.5 | 40.29 | 14,18,23 | 0 |
| 4 | 433.0 | 46.04 | 14,18,22,23 | 4 | 430.5 | 46.04 | 14,18,22,24 | 1 |
| 5 | 475.0 | 51.26 | 14,16,18,22,23 | 5 | 472.5 | 51.26 | 14,16,18,22,24 | 1 |
| 6 | 530.1 | 56.92 | 4,8,10,14,18,23 | 6 | 530.1 | 56.92 | 4,8,10,14,18,23 | 0 |
| 7 | 616.9 | 67.00 | 4,8,10,18,21,22,24 | 7 | 616.9 | 67.00 | 4,8,10,18,21,22,24 | 0 |
| 8 | 659.8 | 72.30 | 4,8,10,16,18,21,22,24 | 8 | 659.8 | 72.30 | 4,8,10,16,18,21,22,24 | 0 |
| 9 | 725.4 | 78.15 | 3,4,8,9,10,18,21,22,24 | 9 | 725.4 | 78.15 | 3,4,8,9,10,18,21,22,24 | 0 |
| 10 | 743.4 | 83.72 | 2,4,8,9,10,16,18,21,22,23 | 10 | 743.4 | 83.72 | 2,4,8,9,10,16,18,21,22,23 | 0 |
| 11 | 776.9 | 84.08 | 3,4,8,9,10,15,16,18,21,22,23 | 11 | 764.9 | 86.06 | 2,4,8,9,10,11,16,18,21,22,23 | 2 |
| 12 | 801 | 86.69 | 3,4,8,9,10,11,15,16,18,21,22,23 | 12 | 762.1 | 90.02 | 2,4,8,9,10,12,13,14,17,20, 22,24 | 7 |
| 13 | 831.3 | 94.42 | 3,4,8,9,10,11,13,14,16,17,20,22, 24 | 13 | 801.4 | 94.69 | 2,4,8,9,10,11,13,14,16,17, 20,22,24 | 1 |
| 14 | 853.5 | 94.78 | 3,4,8,9,10,11,13,14,16,18,19,21, 22,23 | 14 | 803.3 | 96.04 | 2,4,8,9,10,11,13,14,16,17, 19,20,22,23 | 3 |
| 15 | 870.9 | 96.31 | 3,4,8,9,10,11,13,14,15,16,18,19, 21,22, 23 | 15 | 814.4 | 97.57 | 3,4,8,9,10,11,13,14,15,16, 17,19,20,22,23 | 2 |
| 16 | 871.9 | 96.67 | 3,4,7,8,9,10,11,13,14,15,16,18, 19,20, 22,23 | 16 | 849.0 | 97.66 | 3,4,7,8,9,10,11,13,14,15,16, 17,19, 20,22,23 | 1 |
| 17 | 872.0 | 96.94 | 1,3,4,7,8,9,10,11,13,14,15,16,18, 19,20, 22,23 | 17 | 801.3 | 98.02 | 2,4,5,7,8,9,10,11,13,14,15, 16,17,19,20,22,23 | 3 |
| 18 | 872.0 | 96.94 | 1,3,4,6,7,8,9,10,11,13,14,15,16, 18,19, 21,22,23 | 18 | 808.8 | 98.02 | 1,2,4,5,7,8,9,10,11,13,14,15, 16,17, 19,20,22,24 | 5 |
| 19 | 872.0 | 96.94 | 1,3,4,6,7,8,9,10,11,13,14,15,16, 18,19, 21,22,23,24 | 19 | 796.3 | 98.02 | 2,4,5,7,8,9,10,11,13,14,15, 16,17,19,20,22,23,24,25 | 5 |
| 20 | 872.0 | 96.94 | 1,3,4,6,7,8,9,10,11,13,14,15,16, 18,19, 21,22,23,24,25 | 20 | 842.5 | 98.02 | 1,3,4,5,7,8,9,10,11,13,14,15, 16,17, 18,19,21,22,23,25 | 2 |
| P | Obj* | CFR (%) | Location Result of the Maximum Flow Model | Number of Location Differences |
|---|---|---|---|---|
| 16 | 849.00 | 97.66 | 3,4,7,8,9,10,11,13,14,15,16,17,19,20,22,23 | 1 |
| 809.00 | 97.66 | 2,4,6,8,9,10,11,13,14,15,16,17,19,20,22,24 | 4 | |
| 18 | 808.75 | 98.02 | 1,2,4,5,7,8,9,10,11,13,14,15,16,17,19,20,22,24 | 5 |
| 788.75 | 98.02 | 2,4,5,6,7,8,9,10,11,13,14,15,16,17,19,20,22,24 | 5 | |
| 20 | 842.50 | 98.02 | 1,3,4,5,7,8,9,10,11,13,14,15,16,17,18,19,21,22,23,25 | 2 |
| 806.25 | 98.02 | 2,3,4,5,6,7,8,9,10,11,12,13,14,15,16,17,19,20,22,23 | 5 |
| P | CFR (%) | Charging Times | Model 1 Location Result | P | CFR (%) | Charging Times | Model 2 Location Result |
|---|---|---|---|---|---|---|---|
| 1 | 12.59 | 9 | 20 | 1 | 15.56 | 11 | 14 |
| 2 | 24.55 | 29 | 14,23 | 2 | 30.58 | 24 | 14,18 |
| 3 | 40.29 | 54 | 14,18,23 | 3 | 46.76 | 69 | 14,18,23 |
| 4 | 46.04 | 65 | 14,18,22,23 | 4 | 52.88 | 103 | 14,16,18,23 |
| 5 | 51.26 | 95 | 14,16,18,22,23 | 5 | 56.92 | 109 | 4,14,16,18,23 |
| 6 | 56.92 | 199 | 4,8,10,14,18,23 | 6 | 65.74 | 278 | 4,8,10,14,18,23 |
| 7 | 67.00 | 251 | 4,8,10,18,21,22,24 | 7 | 71.85 | 312 | 4,8,10,14,16,18,23 |
| 8 | 72.30 | 292 | 4,8,10,16,18,21,22,24 | 8 | 76.89 | 435 | 3,4,8,9,10,14,18,23 |
| 9 | 78.15 | 382 | 3,4,8,9,10,18,21,22,24 | 9 | 81.21 | 502 | 3,4,8,9,10,14,17,20,23 |
| 10 | 83.72 | 499 | 2,4,8,9,10,16,18,21,22,23 | 10 | 84.35 | 487 | 3,4,8,9,10,16,18,21,22,23 |
| 11 | 84.08 | 436 | 3,4,8,9,10,15,16,18,21,22,23 | 11 | 86.78 | 529 | 3,4,8,9,10,11,16,18,21,22,23 |
| 12 | 86.69 | 487 | 3,4,8,9,10,11,15,16,18,21,22,23 | 12 | 94.69 | 777 | 3,4,8,9,10,11,13,14,16,17,20,23 |
| 13 | 94.42 | 615 | 3,4,8,9,10,11,13,14,16,17,20,22, 24 | 13 | 95.77 | 836 | 3,4,8,9,10,11,13,14,16,17,19, 20,23 |
| 14 | 94.78 | 677 | 3,4,8,9,10,11,13,14,16,18,19,21, 22,23 | 14 | 95.77 | 926 | 3,4,8,9,10,11,13,14,16,17,19, 20,22,23 |
| 15 | 96.31 | 720 | 3,4,8,9,10,11,13,14,15,16,18,19, 21,22,23 | 15 | 97.30 | 975 | 3,4,8,9,10,11,13,14,15,16,17, 19,20,22,23 |
| 16 | 96.67 | 782 | 3,4,7,8,9,10,11,13,14,15,16,18,19, 20,22,23 | 16 | 97.30 | 1011 | 3,4,8,9,10,11,12,13,14,15,16, 17,19,20,22,23 |
| 17 | 96.94 | 843 | 1,3,4,7,8,9,10,11,13,14,15,16,18, 19,20,22, 23 | 17 | 97.57 | 1065 | 1,2,3,4,8,9,10,11,13,14,15,16, 17,19,20,22, 24 |
| 18 | 96.94 | 850 | 1,3,4,6,7,8,9,10,11,13,14,15,16, 18,19,21,22, 23 | 18 | 97.57 | 1101 | 1,2,3,4,8,9,10,11,12,13,14,15, 16,17,19,20, 22,24 |
| 19 | 96.94 | 838 | 1,3,4,6,7,8,9,10,11,13,14,15,16, 18,19,21,22, 23,24 | 19 | 97.57 | 1158 | 1,2,3,4,8,9,10,11,12,13,14,15, 16,17,18,19, 21,22,24 |
| 20 | 96.94 | 838 | 1,3,4,6,7,8,9,10,11,13,14,15,16, 18,19,21,22, 23,24,25 | 20 | 97.66 | 1237 | 1,2,3,4,5,6,8,9,10,11,12,13,14, 15,16,17,19, 20,22,23 |
| P | Obj | CFR (%) | Location Result |
|---|---|---|---|
| 1 | 1.0547 | 46.29 | 8 |
| 2 | 1.2960 | 56.89 | 8,10 |
| 3 | 1.4563 | 63.92 | 8,10,12 |
| 4 | 1.6196 | 71.08 | 8,10,14,16 |
| 5 | 1.7482 | 76.71 | 5,8,10,14,16 |
| 6 | 1.7645 | 77.45 | 4,8,10,14,15,16 |
| 7 | 1.8356 | 80.60 | 3,8,10,14,16,22,53 |
| 8 | 1.9338 | 84.92 | 8,10,14,16,22,24,35,53 |
| 9 | 1.9297 | 84.70 | 8,10,14,16,19,22,35,43,47 |
| 10 | 1.9797 | 86.90 | 4,5,8,9,10,12,14,16,53,54 |
| 11 | 2.0161 | 88.48 | 5,8,10,14,16,21,36,40,47,53,60 |
| 12 | 2.0503 | 89.94 | 5,8,10,11,12,14,16,20,22,29,43,54 |
| 13 | 2.0978 | 92.10 | 6,8,10,14,15,16,20,22,30,35,37,45,54 |
| 14 | 2.1782 | 95.63 | 6,8,10,14,15,16,20,22,25,30,35,40,54,58 |
| 15 | 2.1904 | 96.08 | 2,4,5,6,8,10,12,14,15,16,20,22,24,27,58 |
| 16 | 2.1804 | 95.69 | 4,5,8,10,11,14,15,16,22,26,35,39,52,56,57,61 |
| 17 | 2.2018 | 96.67 | 5,6,8,10,12,14,16,18,25,27,28,40,48,53,56,58,61 |
| 18 | 2.2225 | 97.51 | 3,4,7,8,10,14,15,16,19,22,24,26,35,45,52,55,56,61 |
| 19 | 2.2594 | 99.17 | 3,4,5,8,10,11,13,14,15,16,20,22,24,26,27,30,35,45,56 |
| 20 | 2.2667 | 99.42 | 3,4,5,6,8,10,12,14,15,16,18,21,24,26,27,44,53,55,59,61 |
| 21 | 2.2694 | 99.56 | 1,4,5,6,7,9,12,14,15,16,20,22,23,24,27,33,36,38,40,56,57 |
| 22 | 2.2697 | 99.58 | 2,3,4,5,6,7,8,9,12,13,14,15,16,18,19,23,26,34,35,53,56,62 |
| 23 | 2.2725 | 99.73 | 4,5,8,10,14,15,16,17,19,20,21,23,26,27,37,38,43,45,51,55,56,57,60 |
| 24 | 2.2727 | 99.73 | 2,5,6,7,8,9,10,14,15,16,18,20,23,26,31,33,40,45,46,48,52,56,57,62 |
| 25 | 2.2736 | 99.73 | 2,4,5,6,8,10,11,12,15,16,18,19,20,21,23,24,26,32,44,48,55,56,57,60,62 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, H.; Li, Y.; Zhang, C.; Li, J.; Li, X.; Zhao, Y. Electric Vehicle Charging Station Location Model considering Charging Choice Behavior and Range Anxiety. Sustainability 2022, 14, 4213. https://doi.org/10.3390/su14074213
Liu H, Li Y, Zhang C, Li J, Li X, Zhao Y. Electric Vehicle Charging Station Location Model considering Charging Choice Behavior and Range Anxiety. Sustainability. 2022; 14(7):4213. https://doi.org/10.3390/su14074213
Chicago/Turabian StyleLiu, Huasheng, Yu Li, Chongyu Zhang, Jin Li, Xiaowen Li, and Yuqi Zhao. 2022. "Electric Vehicle Charging Station Location Model considering Charging Choice Behavior and Range Anxiety" Sustainability 14, no. 7: 4213. https://doi.org/10.3390/su14074213
APA StyleLiu, H., Li, Y., Zhang, C., Li, J., Li, X., & Zhao, Y. (2022). Electric Vehicle Charging Station Location Model considering Charging Choice Behavior and Range Anxiety. Sustainability, 14(7), 4213. https://doi.org/10.3390/su14074213