
A Sustainable, Interactive Elderly Healthcare System for Nursing Homes: An Interdisciplinary Design


Abstract
:
1. Introduction
2. Related Work
3. Materials and Methods
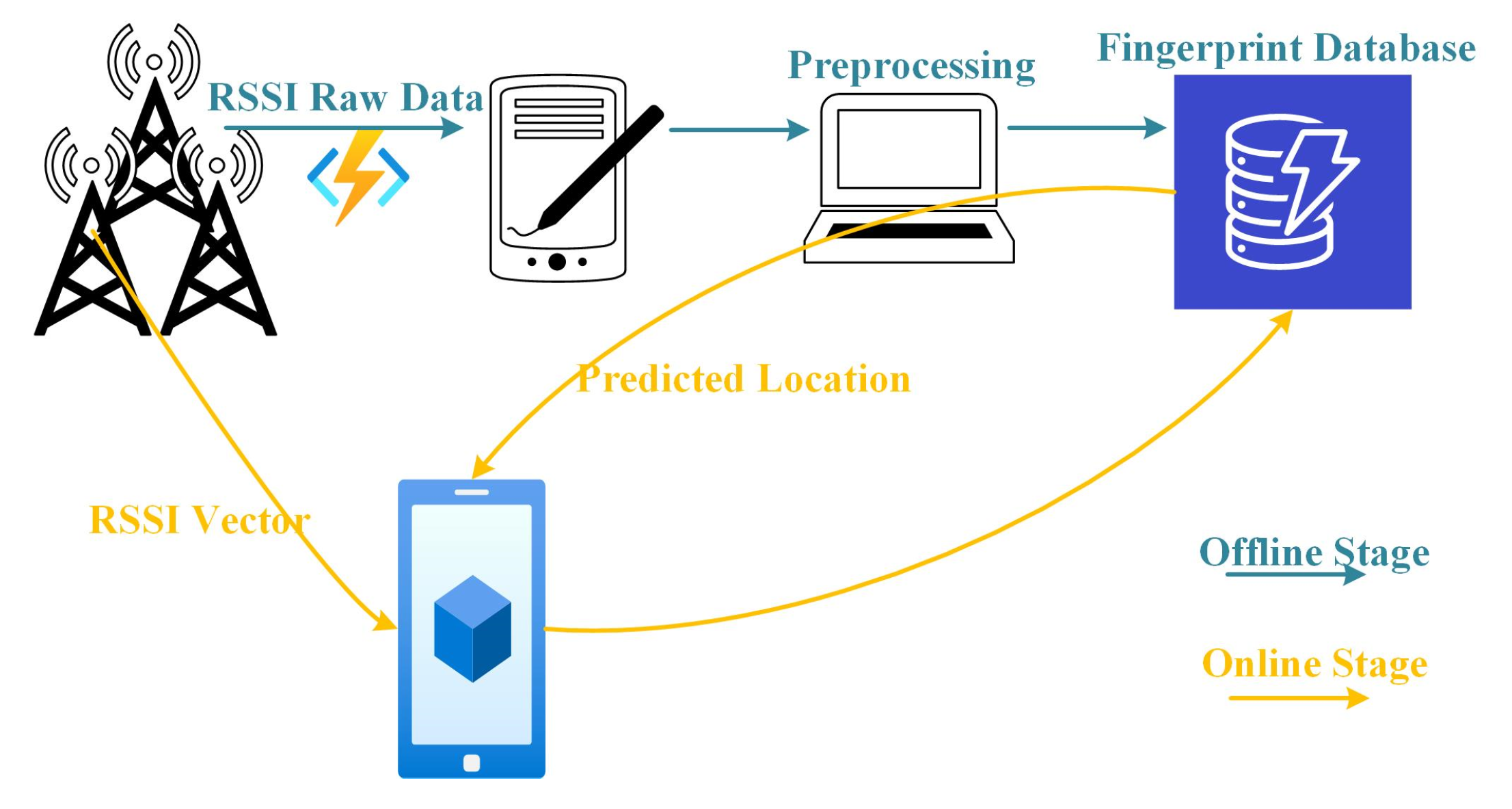
3.1. The General Process of Establishing a Fingerprint Database
3.2. Data Preprocessing
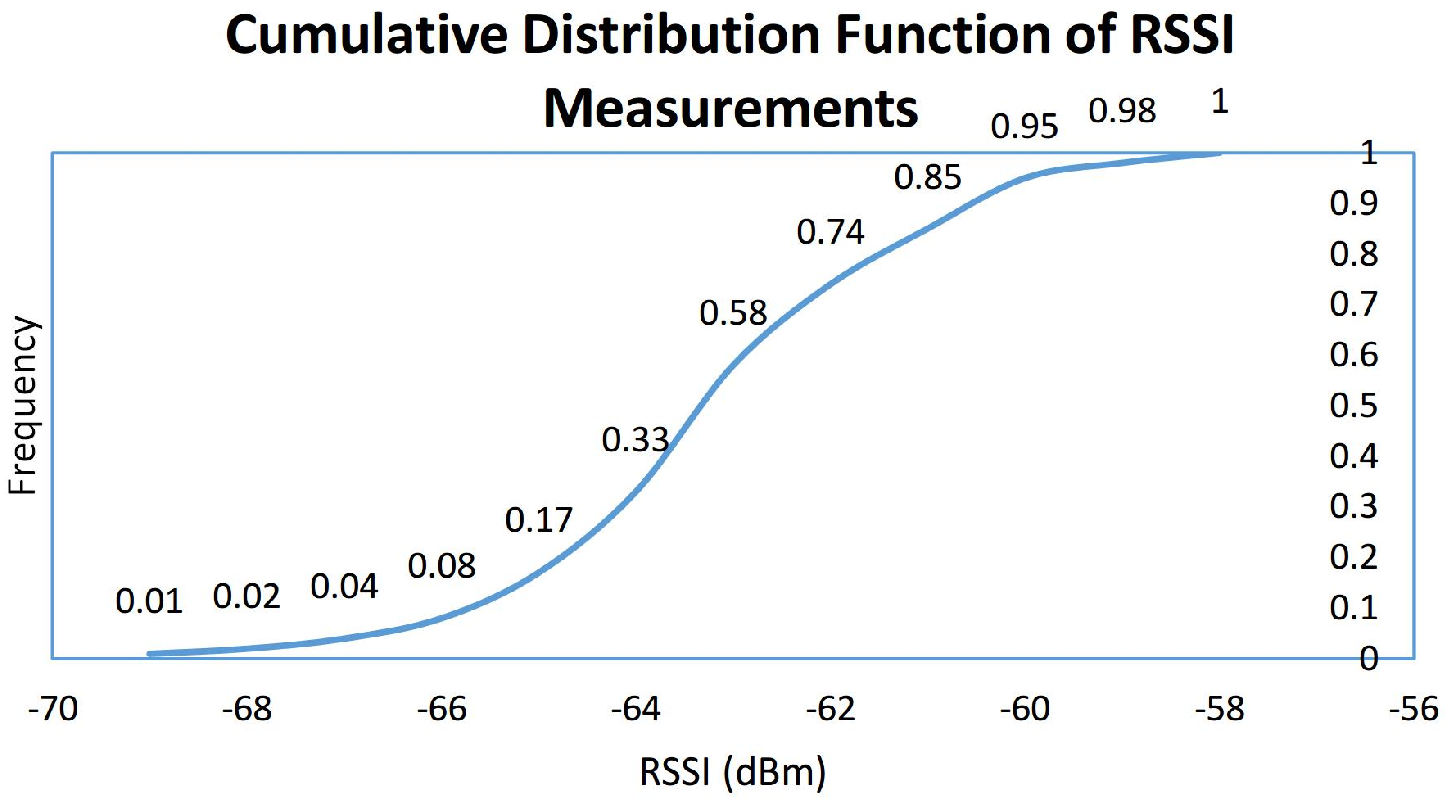
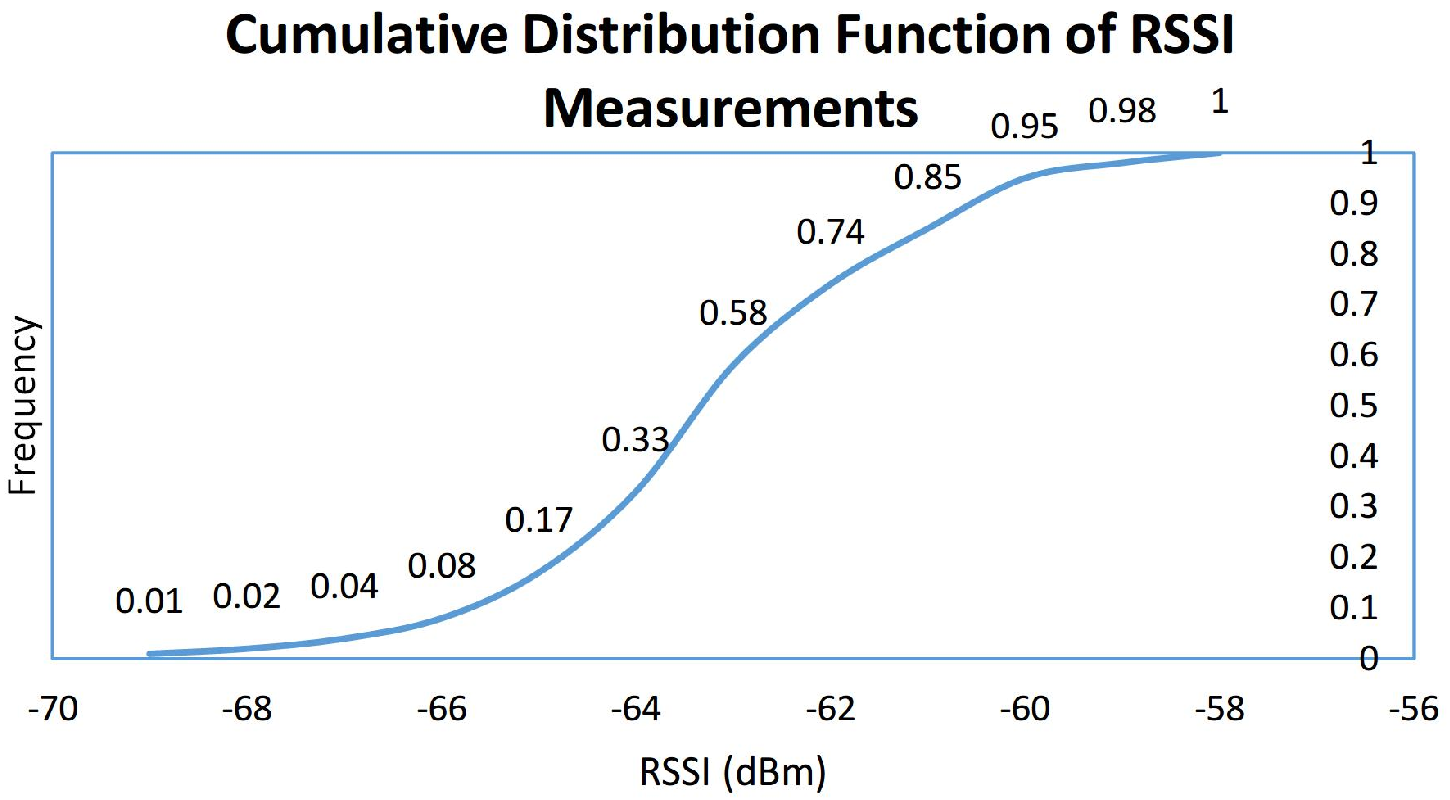
3.2.1. Filter
- (1)
- Initialization of RSSI predicted value and state observation error asand
- (2)
- The Kalman gain is calculated via
- (3)
- Predict the RSSI value as
- (4)
- Update the error covariance following
- (5)
- Repeat Steps (2)–(4) until we obtain a reasonable RSSI value.
3.2.2. Interpolation
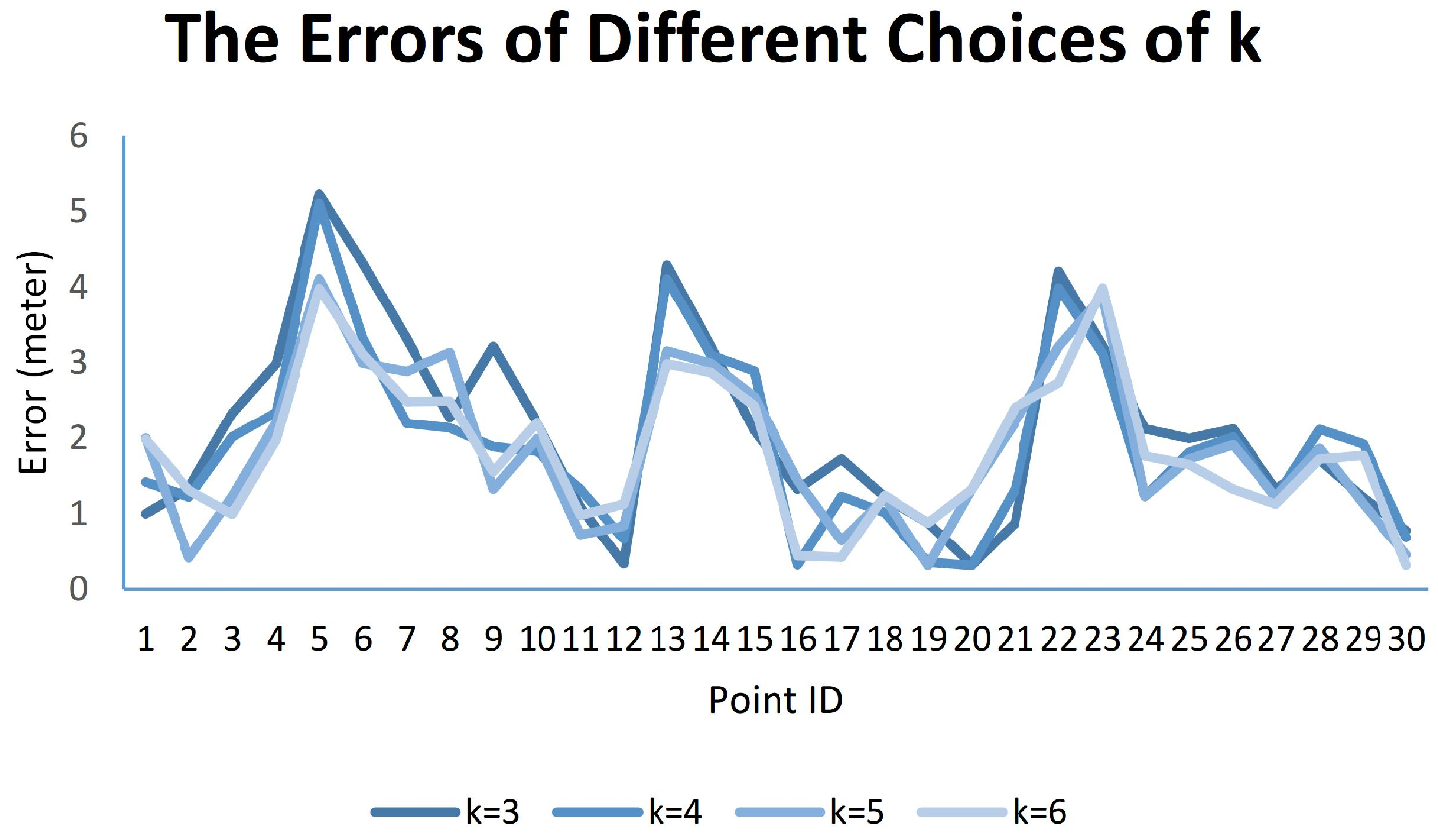
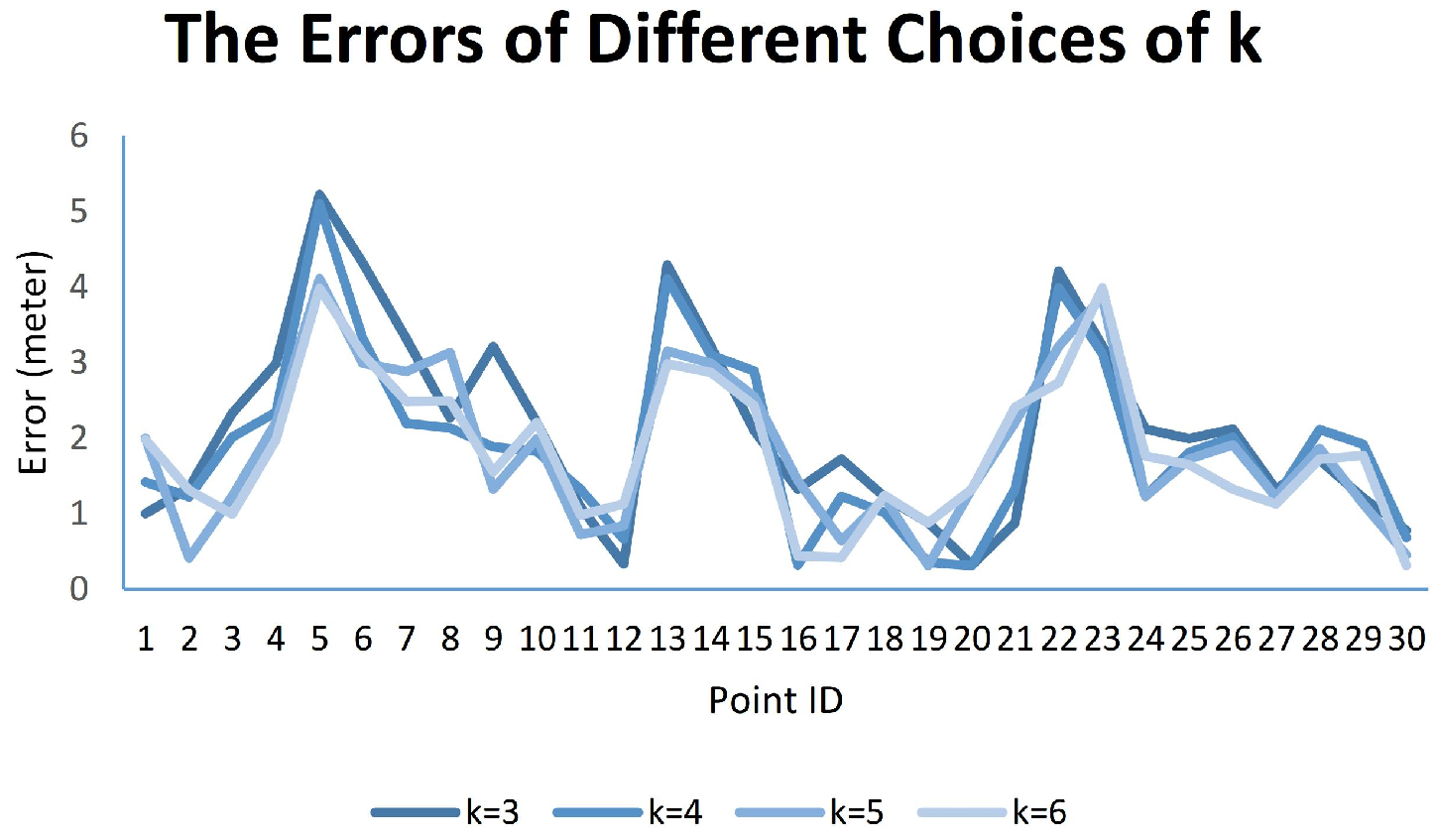
3.3. Online Positioning Algorithm
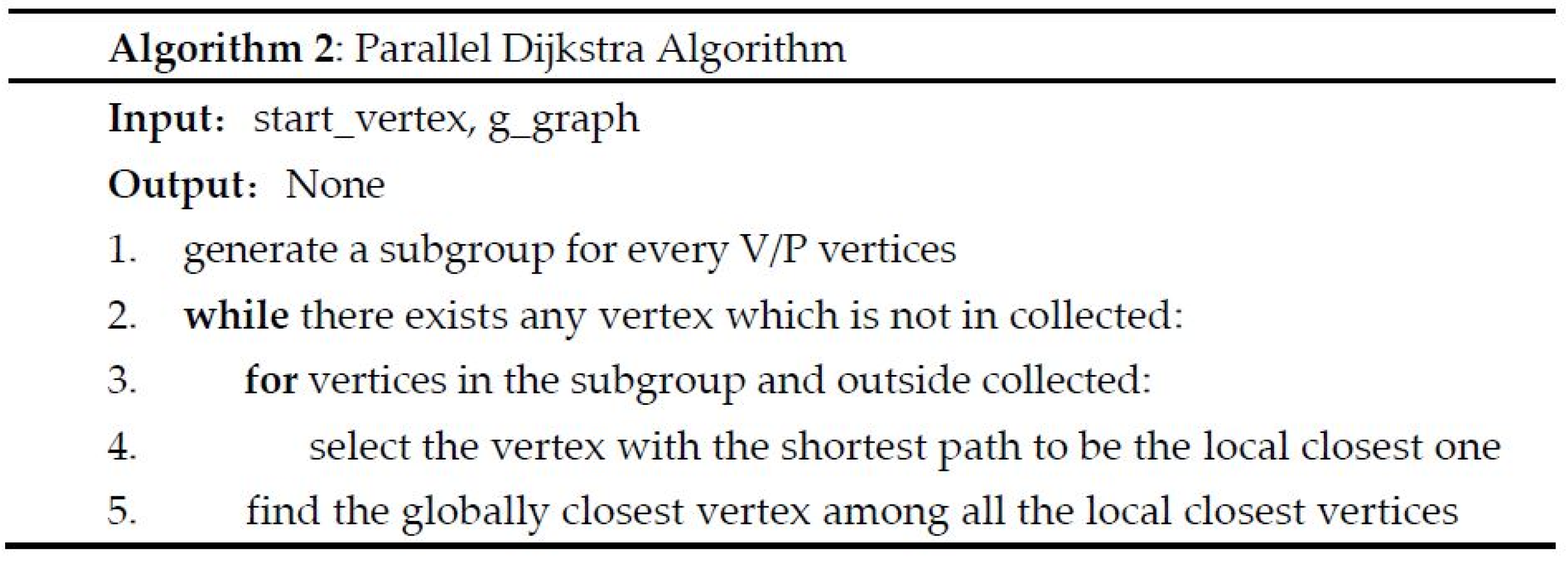
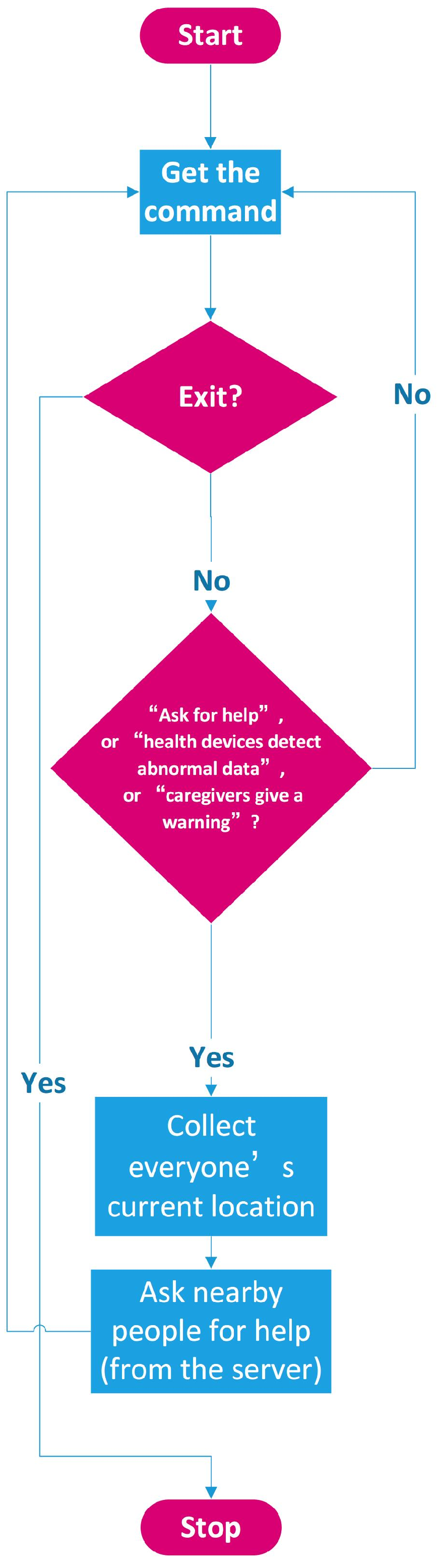
3.4. The Peer-to-Peer Interactive Assistance
3.5. The Integration of Health Devices
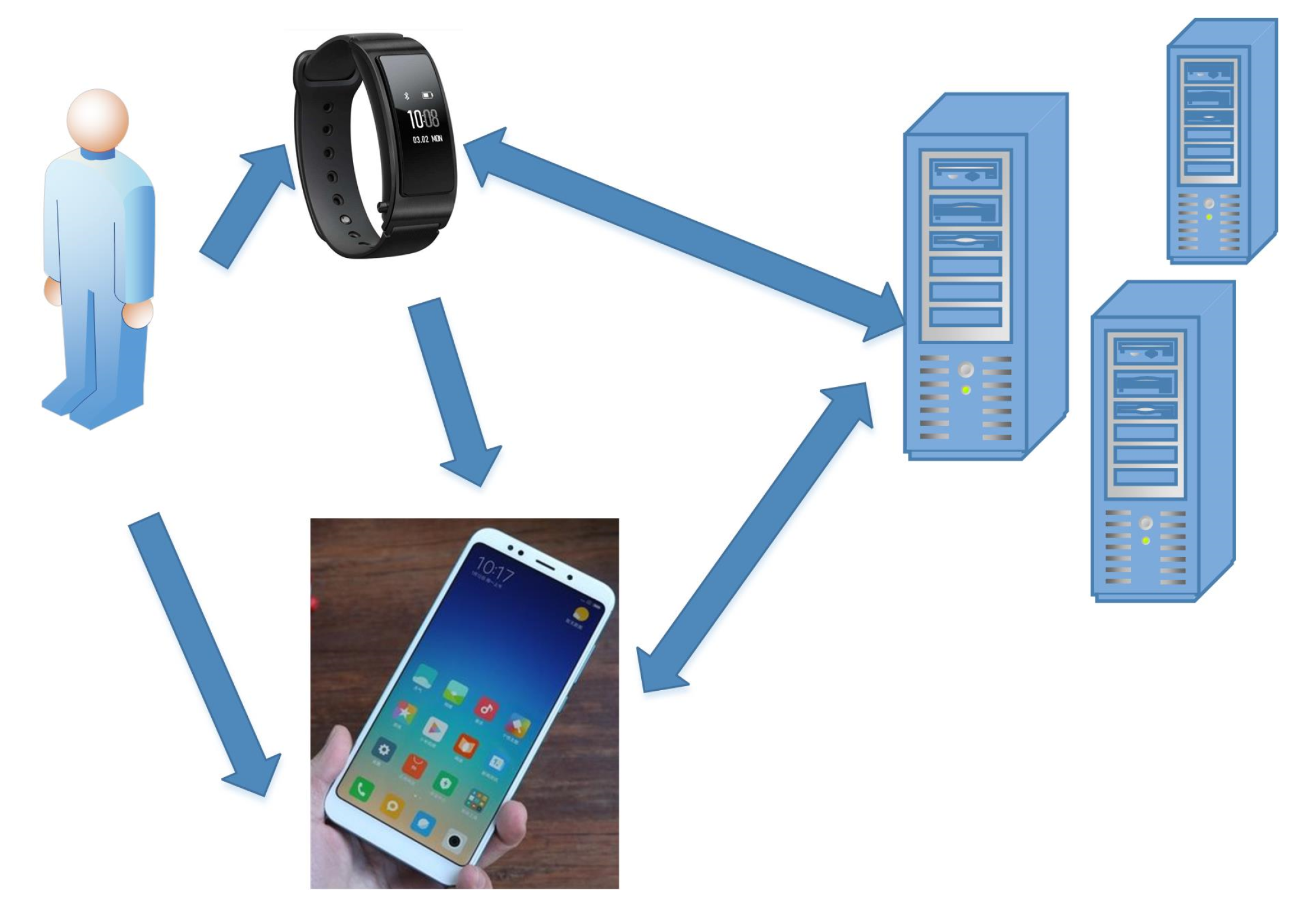
- (1)
- The person, wearable devices, and the server: the client application runs on wearable devices. If the device detects the person is at risk, or the user (or caregivers) manually sends signals, the server will directly respond.
- (2)
- The person, wearable devices, the smart mobile phone, and the server: the wearable devices are not programmable for the third-party programmers, so the client application runs on the mobile phone.
- (3)
- The person, the smart mobile phone, and the server: the user uses the mobile phone and manually sends signals, or the caregivers use the phone to alert nearby people.
4. Results
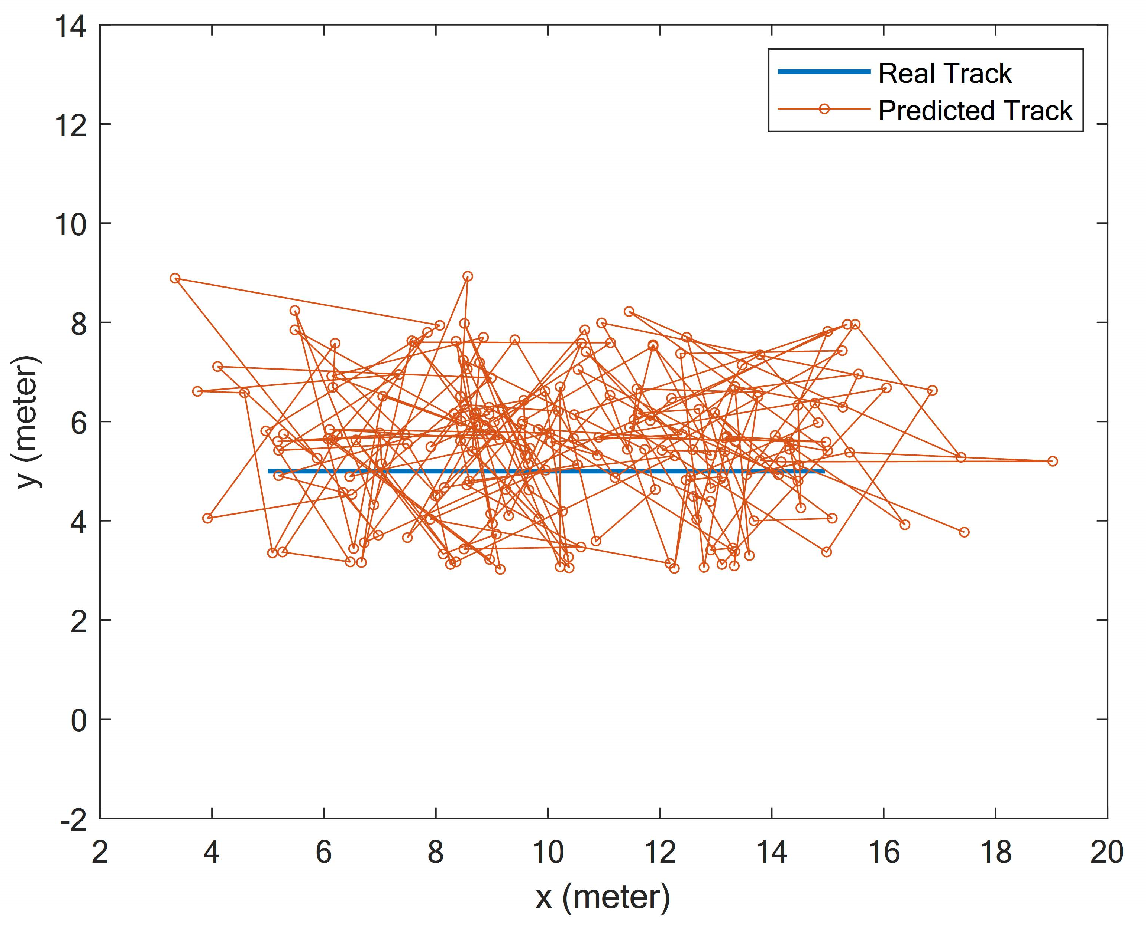
4.1. Indoor-Positioning Test
4.2. The Performance Analysis of Calling Nearby People
4.3. Social Fesability
5. Discussion
6. Conclusions
7. Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| IoT | Internet of Things |
| BLE | Bluetooth Low Energy |
| RSSI | Received Signal Strength Indication |
| RFID | Radio Frequency Identification |
| UWB | Ultra-Wide Band |
| AP | Access Point |
| TOA | Time of Arrival |
| TDOA | Time Difference of Arrival |
| AOA | Angle of Arrival |
| KNN | K-Nearest Neighbors |
| RNN | Recurrent Neural Network |
| MLP | Multi-Layer Perceptron |
| SVM | Support Vector Machine |
| GPU | Graphics Processing Unit |
| UUID | Universally Unique Identifier |
| Probability Density Function | |
| CDF | Cumulative Distribution Function |
| LQE | Linear Quadratic Estimation |
| GPGPU | General-Purpose Graphics Processing Unit |
| CPU | Central Processing Unit |
| CUDA | Compute Unified Device Architecture |
| SP | Streaming Processor |
| SM | Streaming Multiprocessor |
| UMA | Unified Memory Access |
| PCIE | Peripheral Component Interconnect Express |
| OEM | Original Equipment Manufacturer |
Appendix A
References
- Khosla, R.; Chu, M.-T. Embodying care in Matilda: An affective communication robot for emotional wellbeing of older people in Australian residential care facilities. ACM Trans. Manag. Inf. Syst. 2013, 4, 1–33. [Google Scholar] [CrossRef]
- Chen, Y.; Bouferguene, A.; Shen, Y.H.; Al-Hussein, M. Difference analysis of regional population ageing from temporal and spatial perspectives: A case study in China. Reg. Stud. 2019, 53, 849–860. [Google Scholar] [CrossRef]
- Gu, C.L. Urbanization: Processes and driving forces. Sci. China Earth Sci. 2019, 62, 1351–1360. [Google Scholar] [CrossRef]
- Tur-Sinai, A.; Teti, A.; Rommel, A.; Hlebec, V.; Lamura, G. How Many Older Informal Caregivers Are There in Europe? Comparison of Estimates of Their Prevalence from Three European Surveys. Int. J. Environ. Res. Public Health 2020, 17, 9531. [Google Scholar] [CrossRef]
- Calvó-Perxas, L.; Vilalta-Franch, J.; Litwin, H.; Mira, P.; Garre-Olmo, J. A longitudinal study on public policy and the health of in-house caregivers in Europe. Health Policy 2021, 125, 436–441. [Google Scholar] [CrossRef]
- Feng, Z.; Glinskaya, E.; Chen, H.; Gong, S.; Qiu, Y.; Xu, J.; Yip, W. Long-term care system for older adults in China: Policy landscape, challenges, and future prospects. Lancet 2020, 396, 1362–1372. [Google Scholar] [CrossRef]
- Gilissen, J.; Pivodic, L.; Wendrich-van Dael, A.; Gastmans, C.; Vander Stichele, R.; Van Humbeeck, L.; Deliens, L.; Van den Block, L. Implementing advance care planning in routine nursing home care: The development of the theory-based ACP+ program. PLoS ONE 2019, 14, e0223586. [Google Scholar] [CrossRef] [Green Version]
- Tsai, H.-H.; Cheng, C.-Y.; Shieh, W.-Y.; Chang, Y.-C. Effects of a smartphone-based videoconferencing program for older nursing home residents on depression, loneliness, and quality of life: A quasi-experimental study. BMC Geriatr. 2020, 20, 27. [Google Scholar] [CrossRef]
- Anzia, S.F. Pensions in the Trenches: How Pension Spending Is Affecting US Local Government. Urban Aff. Rev. 2022, 58, 3–32. [Google Scholar] [CrossRef]
- Yang, G.X.; Liang, H. A Smart Wireless Paging Sensor Network for Elderly Care Application Using LoRaWAN. IEEE Sens. J. 2018, 18, 9441–9448. [Google Scholar] [CrossRef]
- Huh, J.-H.; Seo, K. Design and Implementation of the Basic Technology for Solitary Senior Citizen’s Lonely Death Monitor ing System using PLC. J. Korea Multimed. Soc. 2015, 18, 742–752. [Google Scholar] [CrossRef] [Green Version]
- Paluch, R.; Müller, C. “That’s Something for Children” An Ethnographic Study of Attitudes and Practices of Care Attendants and Nursing Home Residents Towards Robotic Pets. Proc. ACM Hum. Comput. Interact. 2022, 6, 1–35. [Google Scholar] [CrossRef]
- Vos, E.E.; Hilderink, H.B.M.; de Bruin, S.R.; van der Beek, A.J.; Proper, K.I. The Working Informal Caregiver Model: A Mixed Methods Approach to Explore Future Informal Caregiving by Working Caregivers. Sustainability 2022, 14, 3519. [Google Scholar] [CrossRef]
- McCreary, D.J. Home Health Nursing Job Satisfaction and Retention Meeting the Growing Need for Home Health Nurses. Nurs. Clin. N. Am. 2020, 55, 121–132. [Google Scholar] [CrossRef] [PubMed]
- Bergman, Å.; Olsson, J.; Carlsten, A.; Waern, M.; Fastbom, J. Evaluation of the quality of drug therapy among elderly patients in nursing homes: A computerized pharmacy register analysis. Scand. J. Prim. Health Care 2007, 25, 9–14. [Google Scholar] [CrossRef]
- Merodio, G.; Ramis-Salas, M.; Valero, D.; Aubert, A. How Much Is One Life Worth? The Right to Equity Healthcare for Improving Older Patients’ Health Infected by COVID-19. Sustainability 2020, 12, 6848. [Google Scholar] [CrossRef]
- Osborn, E.; Ritha, M.; Macniven, R.; Agius, T.; Christie, V.; Finlayson, H.; Gwynn, J.; Hunter, K.; Martin, R.; Moir, R.; et al. “No One Manages It; We Just Sign Them Up and Do It”: A Whole System Analysis of Access to Healthcare in One Remote Australian Community. Int. J. Environ. Res. Public Health 2022, 19, 2939. [Google Scholar] [CrossRef]
- Kim, S.K.; Lee, Y.; Yoon, H.; Choi, J. Adaptation of Extended Reality Smart Glasses for Core Nursing Skill Training Among Undergraduate Nursing Students: Usability and Feasibility Study. J. Med. Internet Res. 2021, 23, 24313. [Google Scholar] [CrossRef]
- Huh, J.-H.; Kim, T.-J. A location-based mobile health care facility search system for senior citizens. J. Supercomput. 2019, 75, 1831–1848. [Google Scholar] [CrossRef]
- Doumit, J.; Nasser, R. Quality of life and wellbeing of the elderly in Lebanese nursing homes. Int. J. Health Care Qual. Assur. 2010, 23, 72–93. [Google Scholar] [CrossRef]
- Rinnan, E.; André, B.; Drageset, J.; Garåsen, H.; Espnes, G.A.; Haugan, G. Joy of life in nursing homes: A qualitative study of what constitutes the essence of joy of life in elderly individuals living in Norwegian nursing homes. Scand. J. Caring Sci. 2018, 32, 1468–1476. [Google Scholar] [CrossRef] [Green Version]
- Ko, H.; Huh, J.-H. Electronic Solutions for Artificial Intelligence Healthcare. Electronics 2021, 10, 2421. [Google Scholar] [CrossRef]
- Kim, S.-K.; Huh, J.-H. Consistency of Medical Data Using Intelligent Neuron Faster R-CNN Algorithm for Smart Health Care Application. Healthcare 2020, 8, 185. [Google Scholar] [CrossRef]
- Wu, X.; Li, Y.; Xu, D.; Zhou, H.; Wang, J.; Guo, X.; Zhang, Y. Gas chromatography-mass spectrometry and high-performance liquid chromotagraphy analysis of the drug absorption characteristics in the buccal mucosa via a circulating device. Biomed. Rep. 2015, 3, 51–54. [Google Scholar] [CrossRef] [Green Version]
- Huh, J.-H. An Efficient Solitary Senior Citizens Care Algorithm and Application: Considering Emotional Care for Big Data Collection. Processes 2018, 6, 244. [Google Scholar] [CrossRef] [Green Version]
- Bharanitharan, K.; Ding, J.-R.; Paul, A.; Lee, K.-M.; Hou, T.-W. Dependable management system for ubiquitous camera array service in an elder-care center. ACM Trans. Embed. Comput. Syst. 2013, 12, 1–24. [Google Scholar] [CrossRef]
- Gaddam, A.; Mukhopadhyay, S.C.; Gupta, G.S. Elder Care Based on Cognitive Sensor Network. IEEE Sens. J. 2011, 11, 574–581. [Google Scholar] [CrossRef]
- Hakala, I.; Jansson, J. Managing sensor data streams in a smart home application. Int. J. Sens. Netw. 2020, 32, 247. [Google Scholar] [CrossRef]
- Fischer, M.; Renzler, M.; Ussmueller, T. Development of a Smart Bed Insert for Detection of Incontinence and Occupation in Elder Care. IEEE Access 2019, 7, 118498–118508. [Google Scholar] [CrossRef]
- Maswadi, K.; Ghani, N.B.A.; Hamid, S.B. Systematic literature review of smart home monitoring technologies based on IoT for the elderly. IEEE Access 2020, 8, 92244–92261. [Google Scholar] [CrossRef]
- Cao, Y.L.; Hu, X.G.; Chen, J.P.; Bian, L.; Wang, W.; Li, R.; Wang, X.; Rao, Y.N.; Meng, X.; Wu, B. Initial analysis of the BDS satellite autonomous integrity monitoring capability. GPS Solut. 2019, 23, 35. [Google Scholar] [CrossRef]
- Singkhamfu, P.; Suwansrikham, P. An Experiment for Outdoor GPS Localization Enhancement using Kalman Filter with Multiantenna Consumer-Grade Sensors. Int. J. Adv. Comput. Sci. Appl. 2021, 12, 382–388. [Google Scholar] [CrossRef]
- Nowicki, M.R.; Skrzypczynski, P. Leveraging Visual Place Recognition to Improve Indoor Positioning with Limited Availability of WiFi Scans. Sensors 2019, 19, 3657. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tao, Y.H.; Wu, L.J.; Siden, J.; Wang, G. Monte Carlo-Based Indoor RFID Positioning with Dual-Antenna Joint Rectification. Electronics 2021, 10, 1548. [Google Scholar] [CrossRef]
- Uradzinski, M.; Guo, H.; Liu, X.K.; Yu, M. Advanced Indoor Positioning Using Zigbee Wireless Technology. Wirel. Pers. Commun. 2017, 97, 6509–6518. [Google Scholar] [CrossRef]
- Ke, C.K.; Wu, M.Y.; Chan, Y.W.; Lu, K.C. Developing a BLE Beacon-Based Location System Using Location Fingerprint Positioning for Smart Home Power Management. Energies 2018, 11, 3464. [Google Scholar] [CrossRef] [Green Version]
- Hernandez, N.; Parra, I.; Corrales, H.; Izquierdo, R.; Ballardini, A.L.; Salinas, C.; Garcia, I. WiFiNet: WiFi-based indoor localisation using CNNs. Expert Syst. Appl. 2021, 177, 114906. [Google Scholar] [CrossRef]
- Cheng, C.H.; Syu, S.J. Improving area positioning in ZigBee sensor networks using neural network algorithm. Microsyst. Technol. Micronanosyst. Inf. Storage Process. Syst. 2021, 27, 1419–1428. [Google Scholar] [CrossRef]
- Oguntala, G.; Abd-Alhameed, R.; Jones, S.; Noras, J.; Patwary, M.; Rodriguez, J. Indoor location identification technologies for real-time IoT-based applications: An inclusive survey. Comput. Sci. Rev. 2018, 30, 55–79. [Google Scholar] [CrossRef]
- Chen, Z.; Zhu, Q.; Soh, Y.C. Smartphone Inertial Sensor-Based Indoor Localization and Tracking with iBeacon Corrections. IEEE Trans. Ind. Inform. 2016, 12, 1540–1549. [Google Scholar] [CrossRef]
- Deng, Z.L.; Wang, H.H.; Zheng, X.Y.; Fu, X.; Yin, L.; Tang, S.H.; Yang, F.X. A Closed-Form Localization Algorithm and GDOP Analysis for Multiple TDOAs and Single TOA Based Hybrid Positioning. Appl. Sci. 2019, 9, 4935. [Google Scholar] [CrossRef] [Green Version]
- Le, T.K.; Ono, N. Closed-Form and Near Closed-Form Solutions for TDOA-Based Joint Source and Sensor Localization. IEEE Trans. Signal Process. 2017, 65, 1207–1221. [Google Scholar] [CrossRef]
- Sansano, E.; Montoliu, R.; Belmonte, O.; Torres-Sospedra, J. Indoor Positioning and Fingerprinting: The R Package ipft. R J. 2019, 11, 67–90. [Google Scholar] [CrossRef] [Green Version]
- Huang, S.; Zhao, K.; Zheng, Z.Q.; Ji, W.Q.; Li, T.Y.; Liao, X.F. An Optimized Fingerprinting-Based Indoor Positioning with Kalman Filter and Universal Kriging for 5G Internet of Things. Wirel. Commun. Mob. Comput. 2021, 2021, 9936706. [Google Scholar] [CrossRef]
- Li, X.; Xu, D.; Wang, X.; Muhammad, R. Design and implementation of indoor positioning system based on iBeacon. In Proceedings of the 5th International Conference on Audio, Language and Image Processing (ICALIP), Shanghai, China, 11–12 July 2016; pp. 126–130. [Google Scholar]
- Ye, Y.-X.; Lu, A.-N.; You, M.-Y.; Huang, K.; Jiang, B. Wireless Localization Based on Deep Learning: State of Art and Challenges. Math. Probl. Eng. 2020, 2020, 5214920. [Google Scholar] [CrossRef]
- Amirisoori, S.; Daud, S.M.; Ahmad, N.A.; Aziz, N.; Noor, N. WI-FI Based Indoor Positioning Using Fingerprinting Methods (KNN Algorithm) in Real Environment. Int. J. Future Gener. Commun. Netw. 2017, 10, 23–36. [Google Scholar] [CrossRef]
- Yang, C.-Y.; Ma, Y.-W.; Chen, J.-L.; Lin, C.-J.; Lee, W.-L. Novel Dynamic KNN with Adaptive Weighting Mechanism for Beacon-based Indoor Positioning System. J. Internet Technol. 2019, 20, 1601–1610. [Google Scholar]
- Zhang, S.; Guo, J.; Luo, N.; Wang, L.; Wang, W.; Wen, K. Improving Wi-Fi Fingerprint Positioning with a Pose Recognition-Assisted SVM Algorithm. Remote Sens. 2019, 11, 652. [Google Scholar] [CrossRef] [Green Version]
- Yadav, R.K.; Bhattarai, B.; Gang, H.S.; Pyun, J.Y. Trusted K Nearest Bayesian Estimation for Indoor Positioning System. IEEE Access 2019, 7, 51484–51498. [Google Scholar] [CrossRef]
- Wang, R.; Li, Z.; Luo, H.; Zhao, F.; Shao, W.; Wang, Q. A Robust Wi-Fi Fingerprint Positioning Algorithm Using Stacked Denoising Autoencoder and Multi-Layer Perceptron. Remote Sens. 2019, 11, 1293. [Google Scholar] [CrossRef] [Green Version]
- Hoang, M.T.; Yuen, B.; Dong, X.; Lu, T.; Westendorp, R.; Reddy, K. Recurrent Neural Networks for Accurate RSSI Indoor Localization. IEEE Internet Things J. 2019, 6, 10639–10651. [Google Scholar] [CrossRef] [Green Version]
- Hussain, G.; Jabbar, M.S.; Cho, J.-D.; Bae, S. Indoor Positioning System: A New Approach Based on LSTM and Two Stage Activity Classification. Electronics 2019, 8, 375. [Google Scholar] [CrossRef] [Green Version]
- Li, D.; Zhang, B.; Yao, Z.; Li, C. A Feature Scaling based k-Nearest Neighbor Algorithm for Indoor Positioning Systems. IEEE Internet Things J. 2015, 3, 436–441. [Google Scholar]
- Jin, X.-B.; Robert Jeremiah, R.J.; Su, T.-L.; Bai, Y.-T.; Kong, J.-L. The New Trend of State Estimation: From Model-Driven to Hybrid-Driven Methods. Sensors 2021, 21, 2085. [Google Scholar] [CrossRef] [PubMed]
- Zuo, J.; Liu, S.; Xia, H.; Qiao, Y. Multi-phase fingerprint map based on interpolation for indoor localization using iBeacons. IEEE Sens. J. 2018, 18, 3351–3359. [Google Scholar] [CrossRef]
- Mendoza-Silva, G.M.; Torres-Sospedra, J.; Huerta, J. A meta-review of indoor positioning systems. Sensors 2019, 19, 4507. [Google Scholar] [CrossRef] [Green Version]
- Rezazadeh, J.; Subramanian, R.; Sandrasegaran, K.; Kong, X.; Moradi, M.; Khodamoradi, F. Novel iBeacon placement for indoor positioning in IoT. IEEE Sens. J. 2018, 18, 10240–10247. [Google Scholar] [CrossRef]
- Varma, P.S.; Anand, V. Random forest learning based indoor localization as an IoT service for smart buildings. Wirel. Pers. Commun. 2021, 117, 3209–3227. [Google Scholar] [CrossRef]
- Vladislav, V.; Marina, B. Implementation of Indoor Positioning Methods: Virtual Hospital Case. Procedia Comput. Sci. 2021, 193, 183–189. [Google Scholar] [CrossRef]
- Vy, T.D.; Nguyen, T.L.; Shin, Y. Pedestrian Indoor Localization and Tracking Using Hybrid Wi-Fi/PDR for iPhones. In Proceedings of the 2021 IEEE 93rd Vehicular Technology Conference (VTC2021-Spring), Helsinki, Finland, 25–28 April 2021; pp. 1–7. [Google Scholar]
- Yi, X.; Stokes, D.; Yan, Y.; Liao, C. CUDAMicroBench: Microbenchmarks to Assist CUDA Performance Programming. In Proceedings of the 2021 IEEE International Parallel and Distributed Processing Symposium Workshops (IPDPSW), Portland, OR, USA, 17–21 June 2021; pp. 397–406. [Google Scholar]
- Gunawan, E.P.; Tho, C. Development of an Application for Tourism Route Recommendations with the Dijkstra Algorithm. In Proceedings of the 2021 International Conference on Information Management and Technology (ICIMTech), Jakarta, Indonesia, 19–20 August 2021; pp. 343–347. [Google Scholar]
- Chan, E.Y.; Saqib, N.U. Privacy concerns can explain unwillingness to download and use contact tracing apps when COVID-19 concerns are high. Comput. Hum. Behav 2021, 119, 106718. [Google Scholar] [CrossRef]
- Prince, C.; Omrani, N.; Maalaoui, A.; Dabic, M.; Kraus, S. Are We Living in Surveillance Societies and Is Privacy an Illusion? An Empirical Study on Privacy Literacy and Privacy Concerns. IEEE Trans. Eng. Manag. 2021, 2021, 1–18. [Google Scholar] [CrossRef]
- Ryu, H.; Kim, H. Privacy-Preserving Authentication Protocol for Wireless Body Area Networks in Healthcare Applications. Healthcare 2021, 9, 1114. [Google Scholar] [CrossRef] [PubMed]
- Goad, D.; Collins, A.T.; Gal, U. Privacy and the Internet of Things—An experiment in discrete choice. Inf. Manag. 2021, 58, 103292. [Google Scholar] [CrossRef]
- Ozeran, L.; Solomonides, A.; Schreiber, R. Privacy versus convenience: A historical perspective, analysis of risks, and an informatics call to action. Appl. Clin. Inform. 2021, 12, 274–284. [Google Scholar] [CrossRef] [PubMed]
- Abu Sayeed Mondol, M.; Arif Imtiazur Rahman, M.; Emi, I.A.; Stankovic, J.A.; Samyoun, S. Demo: WADA—An android smart watch app for sensor data collection. In Proceedings of the 2018 Joint ACM International Conference on Pervasive and Ubiquitous Computing, UbiComp 2018 and 2018 ACM International Symposium on Wearable Computers, ISWC 2018, Singapore, 8–12 October 2018; pp. 404–407. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Location | RSSI Vector |
|---|---|
| Test Item | Average Positioning Error | Less Than 0.5 m | Less Than 1.5 m | Less Than 2.5 m |
|---|---|---|---|---|
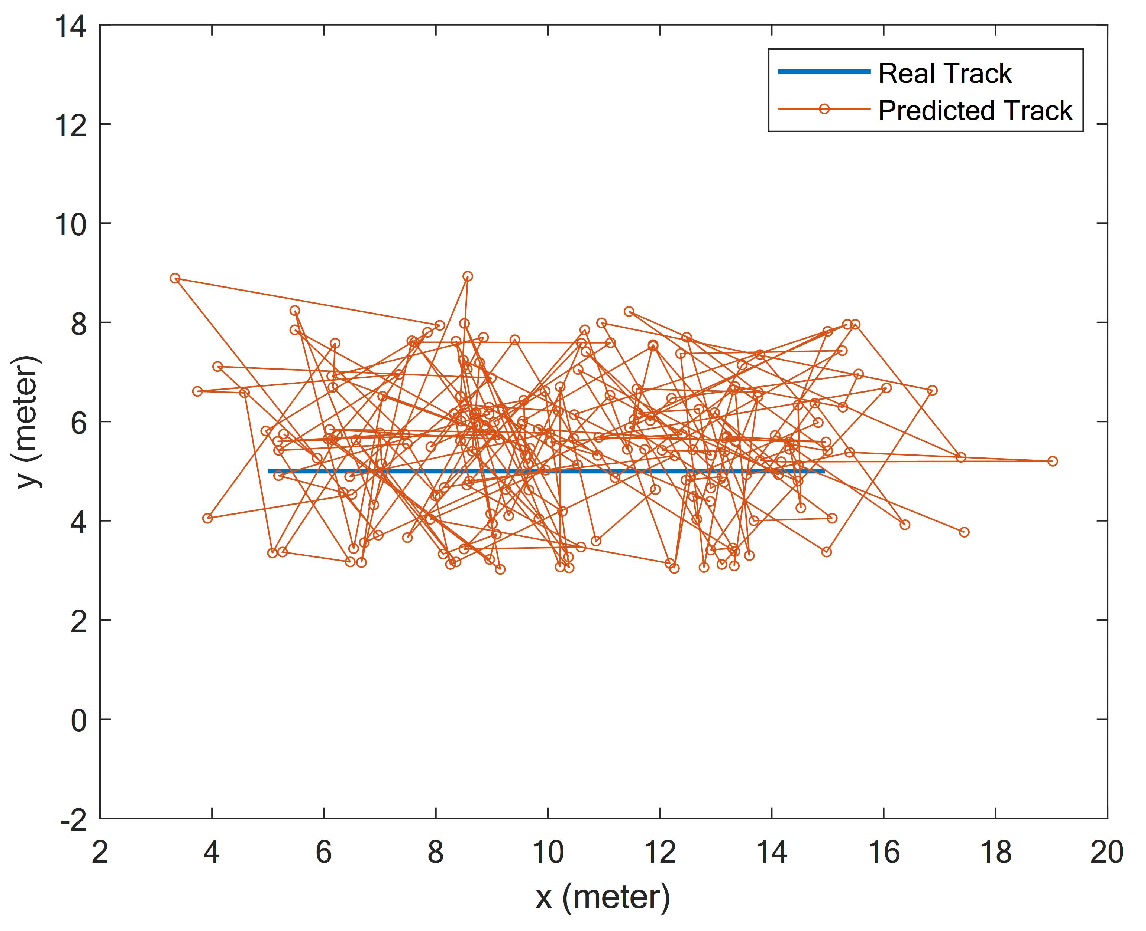
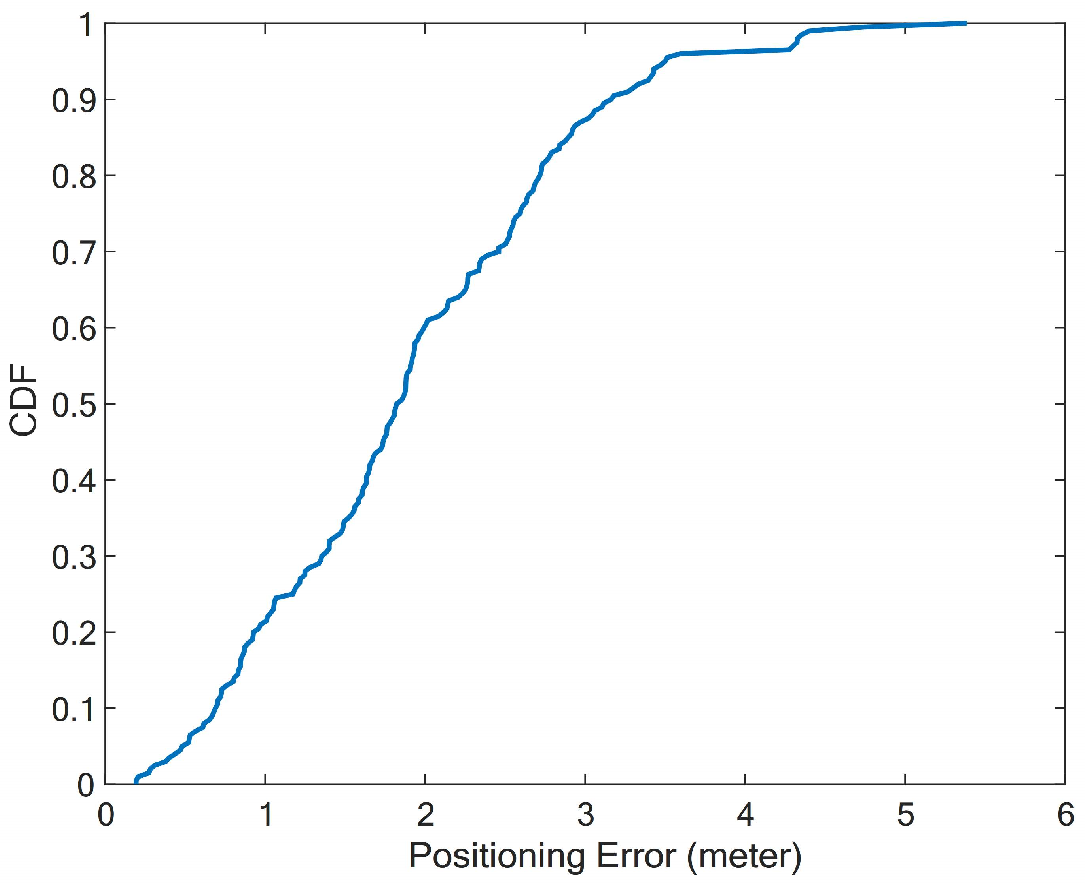
| Static Stability | 1.86 m | 9.5% | 51.5% | 74% |
| Dynamic Stability | 1.92 m | 5% | 34.5% | 70.5% |
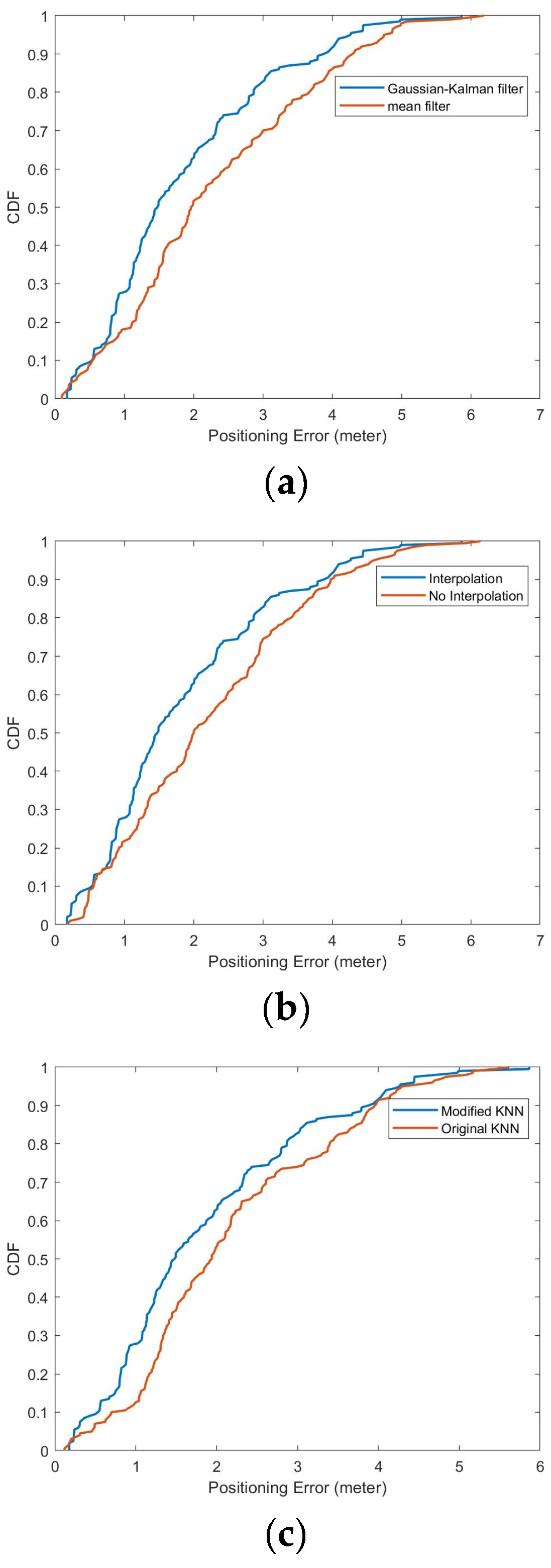
| Test Item | Average Positioning Error | Less Than 0.5 m | Less Than 1.5 m | Less Than 2.5 m |
|---|---|---|---|---|
| Mean Filter | 2.30 m | 8.5% | 33.5% | 60% |
| No Interpolation | 2.23 m | 9% | 35.5% | 60.5% |
| Original KNN | 2.18 m | 7% | 36.5% | 66.5% |
| The Scale of the Graph (Vertices, Edges) | Sequential Algorithm (100 Times) | Parallel Algorithm (100 Times) | Speedup Ratio (Sequential/Parallel) | Is Parallel Algorithm More Efficient? |
|---|---|---|---|---|
| (10, 40) | 0.31 s | 0.69 s | 0.45 | No |
| (50, 250) | 1.11 s | 0.89 s | 1.25 | Yes |
| (100, 500) | 2.88 s | 1.96 s | 1.47 | Yes |
| (500, 2500) | 13.22 s | 8.33 s | 1.59 | Yes |
| (1000, 5000) | 30.21 s | 18.32 s | 1.65 | Yes |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, C.; Wang, W.; Li, F.; Yang, D. A Sustainable, Interactive Elderly Healthcare System for Nursing Homes: An Interdisciplinary Design. Sustainability 2022, 14, 4204. https://doi.org/10.3390/su14074204
Yang C, Wang W, Li F, Yang D. A Sustainable, Interactive Elderly Healthcare System for Nursing Homes: An Interdisciplinary Design. Sustainability. 2022; 14(7):4204. https://doi.org/10.3390/su14074204
Chicago/Turabian StyleYang, Cunwei, Weiqing Wang, Fengying Li, and Degang Yang. 2022. "A Sustainable, Interactive Elderly Healthcare System for Nursing Homes: An Interdisciplinary Design" Sustainability 14, no. 7: 4204. https://doi.org/10.3390/su14074204
APA StyleYang, C., Wang, W., Li, F., & Yang, D. (2022). A Sustainable, Interactive Elderly Healthcare System for Nursing Homes: An Interdisciplinary Design. Sustainability, 14(7), 4204. https://doi.org/10.3390/su14074204