1. Introduction
Road traffic casualties caused by mixing heavy goods vehicles (HGVs) and vulnerable road users (VRUs) on Europe’s roads is a well-documented problem. An annual report from the Volvo Group [
1] analysed 2014 European road crash injury data and found that, of the 26,000 EU fatalities, 15% were due to HGVs, while HGVs made up only 3% of the traffic volume. Of the HGV-related fatalities, 32% were vulnerable road users and of the 1230 VRU fatalities, 53% were pedestrians, 22% cyclists and 25% moped riders or motorcyclists. The Volvo research also examined the scenarios in which crashes occurred, reporting that an HGV turning to the nearside was the most dangerous and frequently occurring crash scenario between cyclists and HGVs and was most common in urban areas. Note that a nearside turn equates to a left turn for a right-hand-drive vehicle driving on the left and a right turn for a left-hand-drive vehicle driving on the right.
Meanwhile, virtual modelling of HGV cabs carried out by Summerskill and Marshall [
2] concluded that all standard vehicle configurations have blind spots which can hide VRUs from the driver’s direct vision. Other research conducted by Marshall et al. [
3] used 2010–2015 STATS-19 police data to investigate the scenarios related to HGV and VRU crashes in Great Britain. The research found that 32% of all impacts between HGVs and VRUs occurred when the HGV was moving off forwards, but 58% of impacts which resulted in serious injury or fatality occurred during a turn to the nearside—in other words, a left-turn manoeuvre for the right-hand-drive vehicles in the sample.
The issue of HGV vision (“blind spots”) has been known for some time, and various European regulations have been developed in an attempt to improve matters. For example, European directive 2003/97/EC concerning type approval of devices for indirect vision [
4] states that in conjunction with the standard class III and IV mirrors on the vehicle, N3 vehicles (goods vehicles in excess of 12 tonnes) must be fitted with both class V and VI mirrors to minimise blind spots to the nearside kerb area and nearside front of the vehicle, respectively. The directive clearly outlines the overall requirement to fit the devices, alongside the dimensions and visible area needed for these mirrors. More recently, active safety systems have been legally mandated. A level 1 advanced emergency braking system (AEBS) has been mandatory for new types of HGV over 7.5t since 2015, in an obligation outlined under EC Regulation 661/2009 [
5], and level 2 AEBS became mandatory for new types from 1 November 2018 [
6]. The systems currently on the market are effective in targeting collisions with vehicles ahead, yet recent Euro-NCAP light commercial vehicle tests [
7] indicate such systems have difficulty in detecting pedestrians and other vulnerable road users compared to the systems used on passenger cars.
In 2018, Transport for London (TfL) reported statistics showing that between 2015 and 2017, HGVs were disproportionately involved in fatal collisions with vulnerable road users in the British capital. A total of 63% of killed cyclists and 25% of killed pedestrians were associated with an HGV impact, despite HGVs making up only 4% of the overall miles driven in the capital [
8]. This was not a sustainable situation and did not fit with the Vision Zero philosophy to eradicate all deaths and serious injuries from London’s streets by 2041 [
9]. Research commissioned by TfL [
10] contributed to the requirement for all vehicles of more than 12 tonnes in gross vehicle weight (GVW) to possess an HGV safety permit [
11] to operate in Greater London from October 2020. The safety permit is granted providing the vehicle meets the Direct Vision Standards (DVS) developed by TFL to address the high number of collisions in London involving HGVs and people walking or cycling. The DVS objectively measures how much a driver can see through their cab windows and mirrors and how big the resulting blind spots are. This is communicated as a star rating from zero (poor) to five (excellent), which indicates the level of risk to people walking and cycling near the vehicle. If the HGV is not capable of achieving at least one star in the DVS, it can still enter London provided it has fitted equipment which meets the TfL Safe System (SS) requirements [
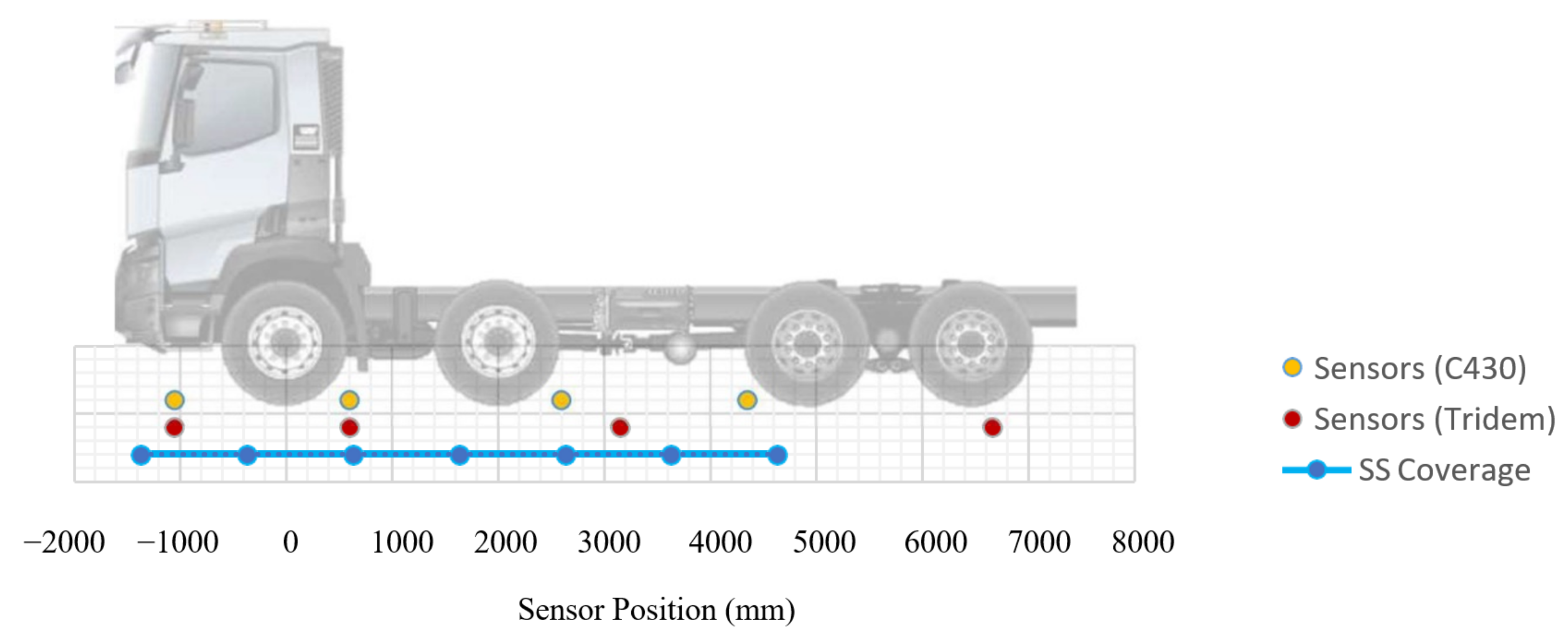
11]. Essentially, this comprises a class V mirror fitted to the nearside kerb area, a class VI mirror to the nearside vehicle front, a fully operational camera monitoring system fitted to the nearside of the vehicle and a sensor system also mounted to the nearside alerting the driver to the presence of a cyclist or pedestrian (sensors are to be placed along the nearside of the vehicle covering a 6 m length from the front or 1 m from the rear to the front, whichever is shortest). No specific make or brand of equipment or technology is mandated as part of the Safe System, and the sensor systems are viewed as being very much non-OE, postproduction fitments by third-party companies. TfL considers direct vision as the future in creating safer vehicles and safer urban environments. However, they also realised that the HGV service life is much longer than that of passenger cars and that HGV manufacturers needed lead time to develop the next generation of cabs with enhanced direct vision. The introduction of the Safe System is intended to serve as a mitigation to enhance vehicle safety on London’s roads immediately until the more fundamental change of increased direct vision is achieved.
In a future transport system, we will still likely have a mix of pedestrians, cyclists and HGVs sharing the roads. In fact, the proportion of vulnerable road users will increase as we move toward a greener society. In that respect, the success or otherwise of the current HGV initiative in London could have important implications for future city safety.
The research conducted for this paper therefore had two main aims: first, to examine current real-world crash data in order to ascertain the most up-to-date collision factors associated with HGV to VRU collisions in Great Britain and determine the effect (if any) of changes to relevant safety regulations in recent years; and secondly, to analyse the efficacy of the TfL Safe System sensor requirements for HGVs that do not achieve the minimum one-star DVS rating.
4. Discussion
In Europe, efforts to minimise HGV blind spots to the nearside kerb area and nearside front have been ongoing for several years. Apart from improving direct vision from HGV cabs, the fitment of class V and VI mirrors is mandatory, and advanced emergency braking systems have been required since 2015 to help stop the vehicle if a vulnerable road user moves into the frontal blind spot. However, analysis of 2019 crash data for Great Britain (Stats19) suggested that the HGV “blind spot” problem has not gone away and supports the need for further improving VRU detection.
In March 2021, in a move to reduce vulnerable road user casualties associated with HGV impacts, Transport for London launched its Safety Permit Scheme for HGVs entering London. The scheme specifies minimum requirements for direct vision from HGV cabs, but failing these, an operating permit is granted providing the vehicle is equipped with a fully operational side camera monitoring system, class V and VI mirrors and a side sensor system which alerts the driver to a person walking or cycling on the nearside of the vehicle. The very inclusion of the sensor requirements suggests a recognition that cameras and mirrors alone may not be enough to provide adequate warning of the proximity of VRUs. In that regard, any sensor system would need to comprehensively cover the nearside and front corner blindspots of the HGV.
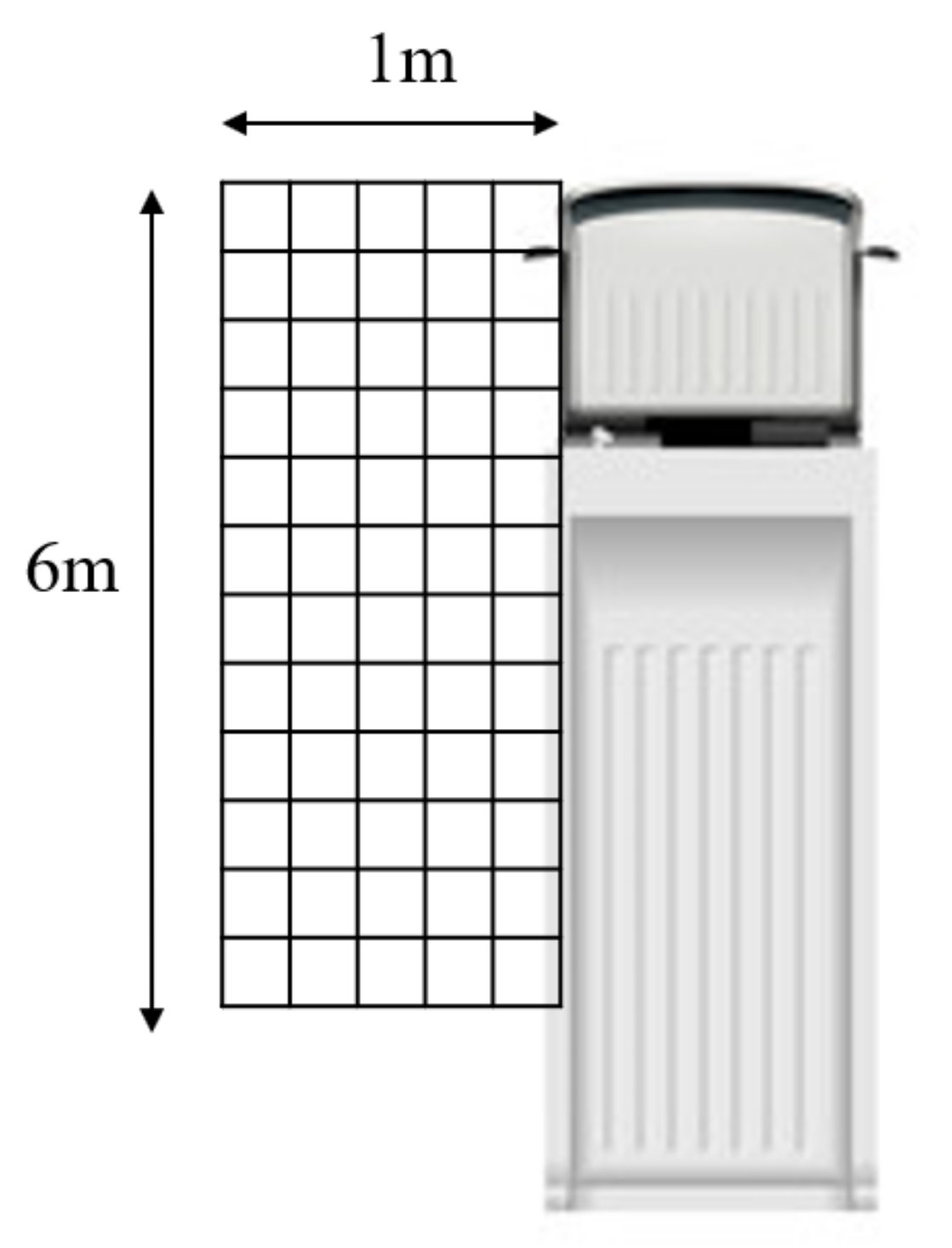
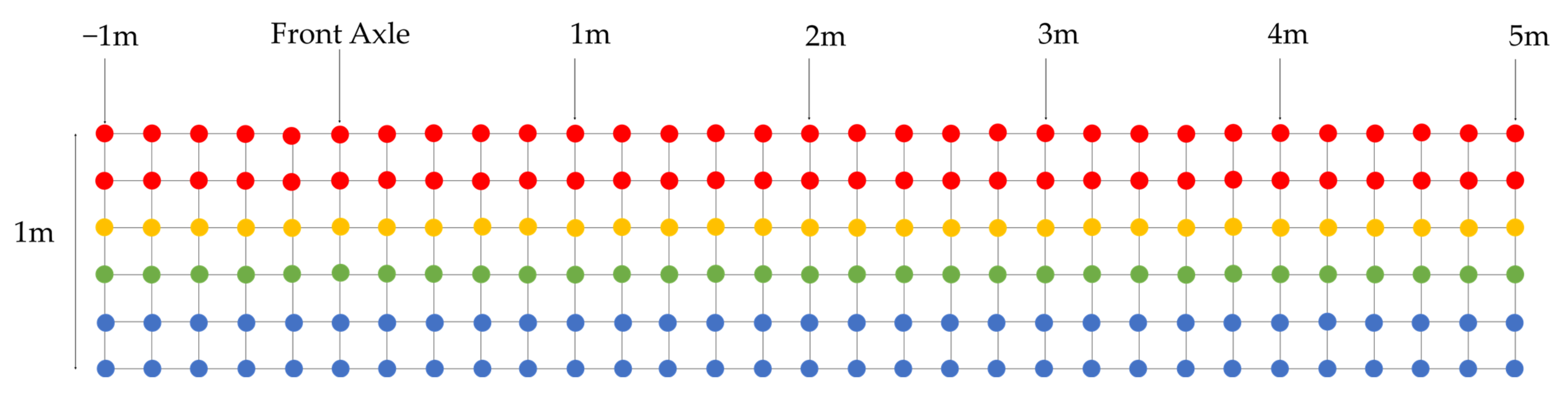
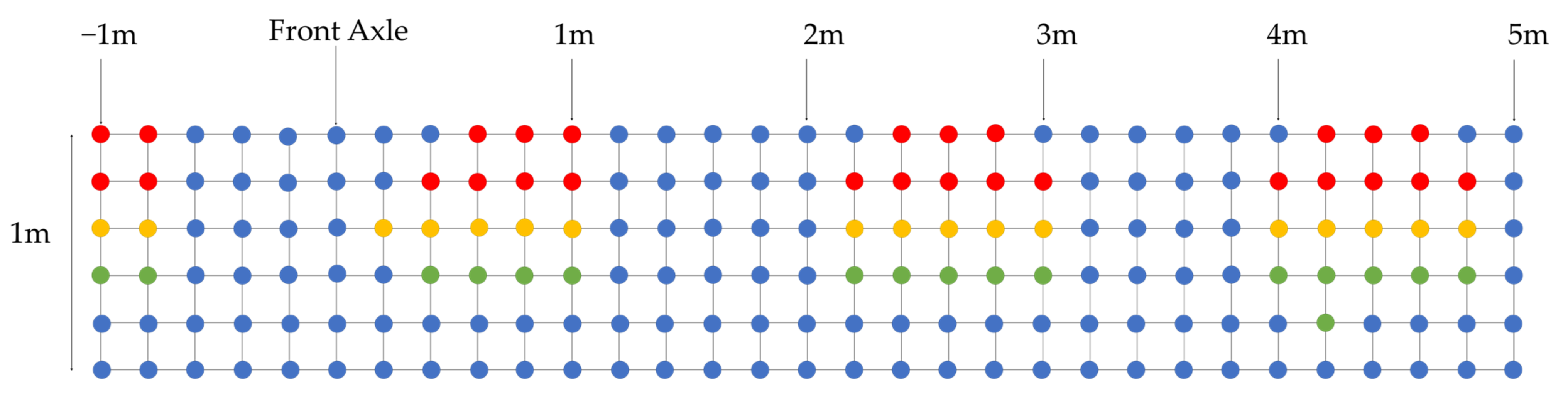
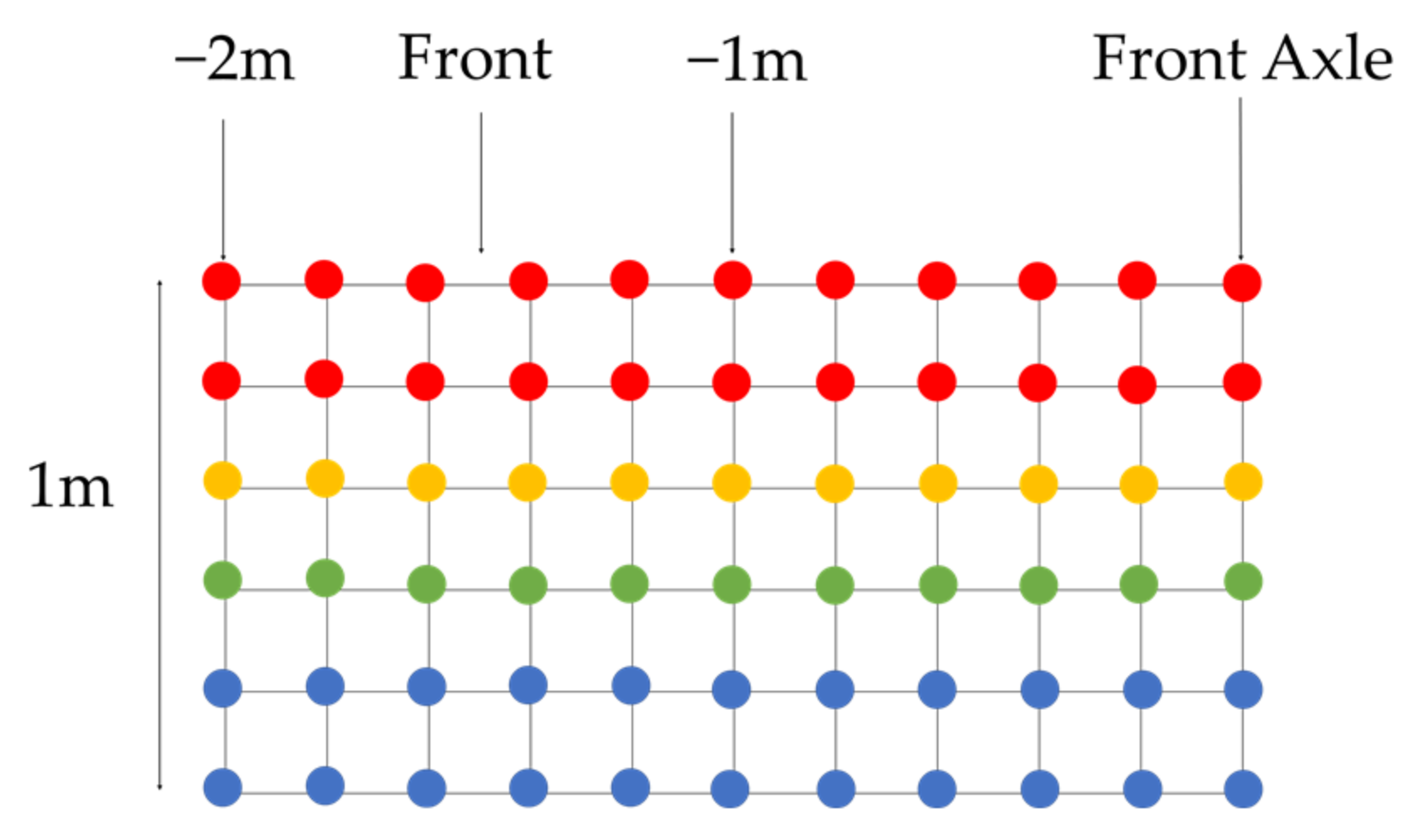
A nearside ultrasound sensor system, fitted in accordance with the requirements for the Safe System, was tested for accuracy and coverage using a small pedestrian surrogate. It was found to provide an overall coverage of 48% of the required nearside zone, a modest improvement compared to the 43% reported for a system using older technology in 2011 [
17]. Despite this improvement, there were still significant blind spots which could present a danger to VRUs. The fitted system did not register 56% of critical “stop vehicle” nodes” and 45% of nodes where a “slow vehicle” recommendation was required, and it did not flag 48% of “proceed with caution” nodes. An additional concern was that zones of up to 1 m in length were blind within the test grid. This is especially of concern for pedestrians. The length of a typical adult pedal cycle means it is likely to be only partially in a zone of zero detection, and thus more visible. Yet, under cornering when the bike is angled or for a smaller object, for example a child’s bike, there is a chance of being lost from view. Indeed, some studies [
18] suggest that when using only ultrasound as a detection medium, bicycles are more difficult to detect than pedestrians.
The most forward sensor provided poor coverage around the front nearside corner of the vehicle. The system actually missed 68% of desired “stop vehicle” nodes ahead of the front axle. This front blind spot represents a significant proportion of accidents for both pedestrians and cyclists, and the correctly installed safety sensors did not comprehensively cover this zone. The AEBS system fitted to the vehicle (as required within Type approval legislation) should theoretically close this blind spot, but its operational performance comes into question because the recently performed Euro-NCAP tests for light commercial vehicles [
7] showed that VRU detection for commercial vehicles could fall below the standard observed for those fitted to passenger cars.
One method to combat the blind spots in side sensor systems would be to install further devices along the coverage area, with overlaps to ensure 100% coverage. However, this would result in an increased cost, and there is also the issue of locating a device within the chassis of the vehicle. HGVs are inherently different to passenger cars due to the nature of their operation and the variety of tasks they complete. Different axle configurations, bodies and accessories, coupled with the fact that most devices are fitted by a third party post vehicle manufacture, make it difficult to define a technical requirement for locations of sensors. As an example, there was a disparity observed between the fitment positions of sensors on the test and comparison vehicles in this study. This difference between the two vehicles likely alters the detection performance of each vehicle, with subsequent blind spots being removed or produced.
The issues with sensor coverage on the nearside might be addressed by upgrading and standardising the sensor performance and location requirements within the Safe System guidelines. There is disparity between different sensor manufacturers regarding calibration distance at which the sensors will register a red/amber/green light, and there is no specific type approval or legislative requirement for this performance. Alternative products were found to report activation at up to 2.5 m away with the transition occurring every 0.5 m [
19], in contrast to the system analysed here implementing detection up to 0.8 m away and transitioning every 0.2 m. This inconsistency is concerning as certain systems/vehicles may be operating at a shorter distance than others, only detecting VRUs when they are closer to a collision, even though they all meet the Safe System guidelines.
Recent research [
20] has suggested that sensors represent a far greater opportunity to enhance the safety of VRUs than amendments to cab design. The conclusion is, however, based on the use of a 360° detection system with the activation effectiveness of an Original Equipment (OE) Automatic Emergency Braking System (AEBS) in defining sensor reliability, rather than the simpler aftermarket systems specified for the Safe System. These OE systems can harness the vehicle’s onboard computer power for image processing, but even with these systems, reliable VRU detection still poses a challenge. A pedestrian detection algorithm based on the fusion of measurements from multiple Lidars has been proposed to improve reliability [
21], yet the developers admit that detection accuracy still declines in harsh environments and when the pedestrian is partially occluded. The use of deep learning algorithms to deal with the occlusion issue is showing promise, as these algorithms essentially identify a pedestrian using less information [
22]. However, these advanced systems need to be factory-fitted, while the rationale behind the Safe System is to allow HGV access to London based on the fitment of aftermarket sensors.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}