
Use of Parallel ResNet for High-Performance Pavement Crack Detection and Measurement


 ,
,  and
and 
Abstract
:1. Introduction
2. Related Works
2.1. Crack Detection
2.2. Crack Measurement
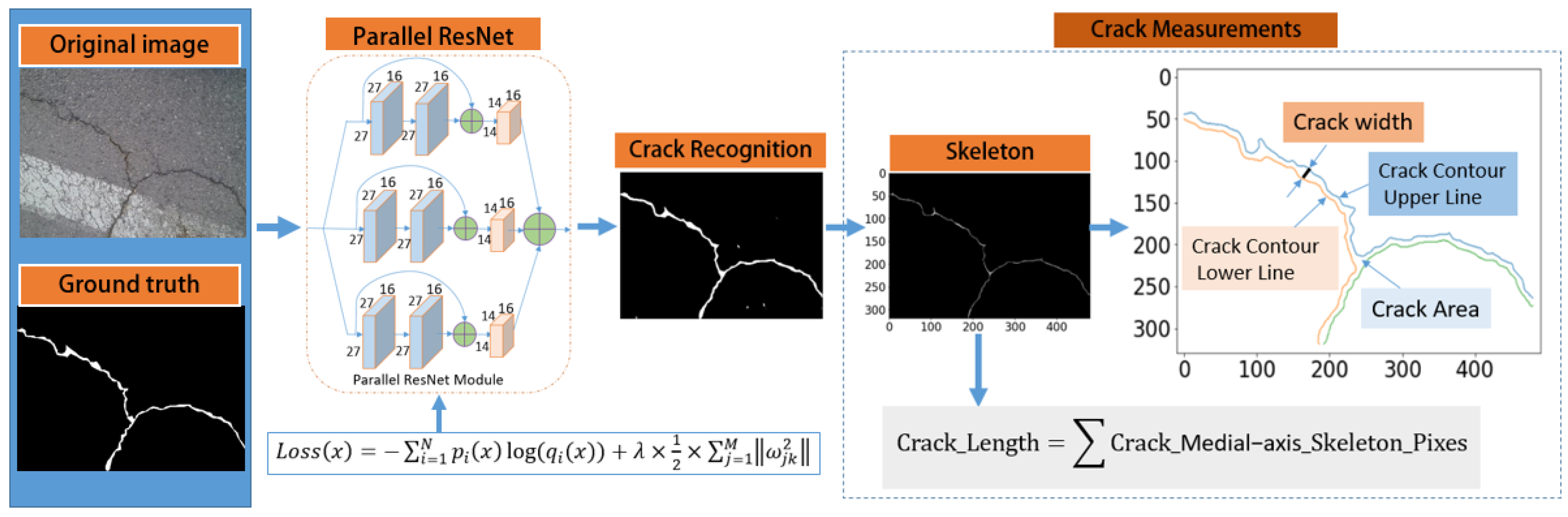
3. Methodology
3.1. Automatic Pavement Crack Detection Method
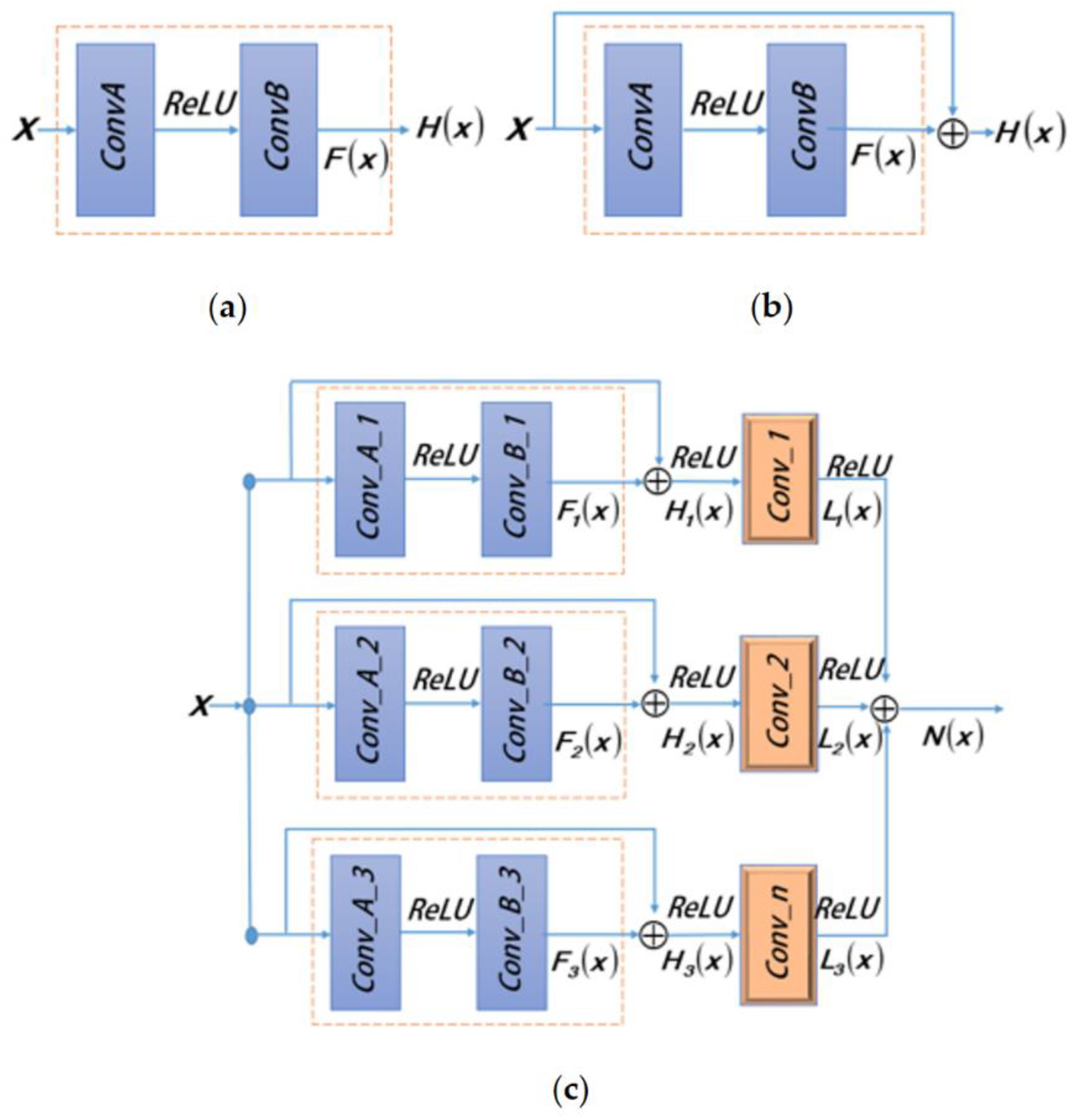
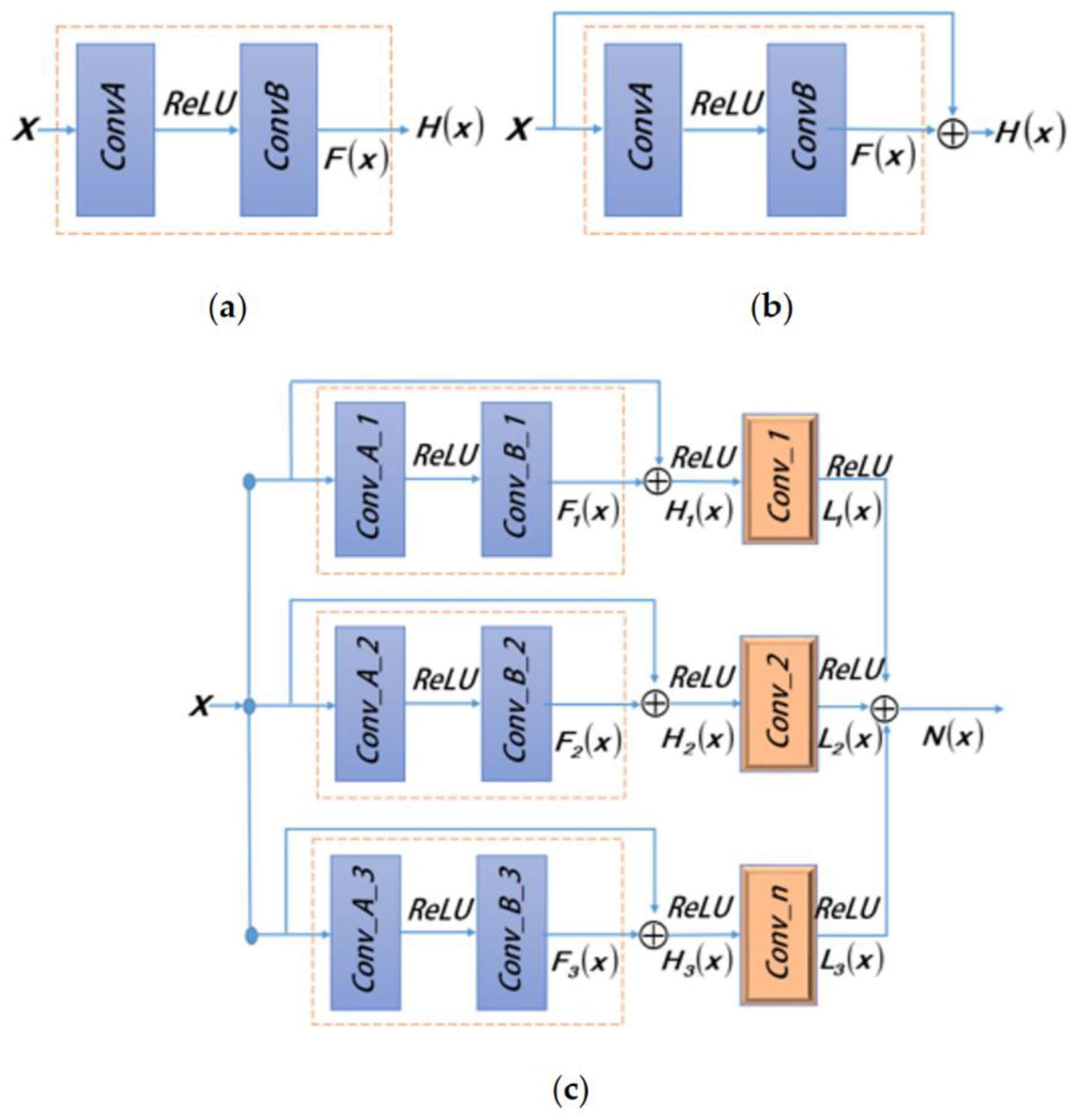
- Figure 4a, which represents two standard convolutional layers. The related function is defined by Equation (4):
- Figure 4b, which shows a residual module skipping two convolutional layers (L = 2). The mathematical expression is described by Equation (5):
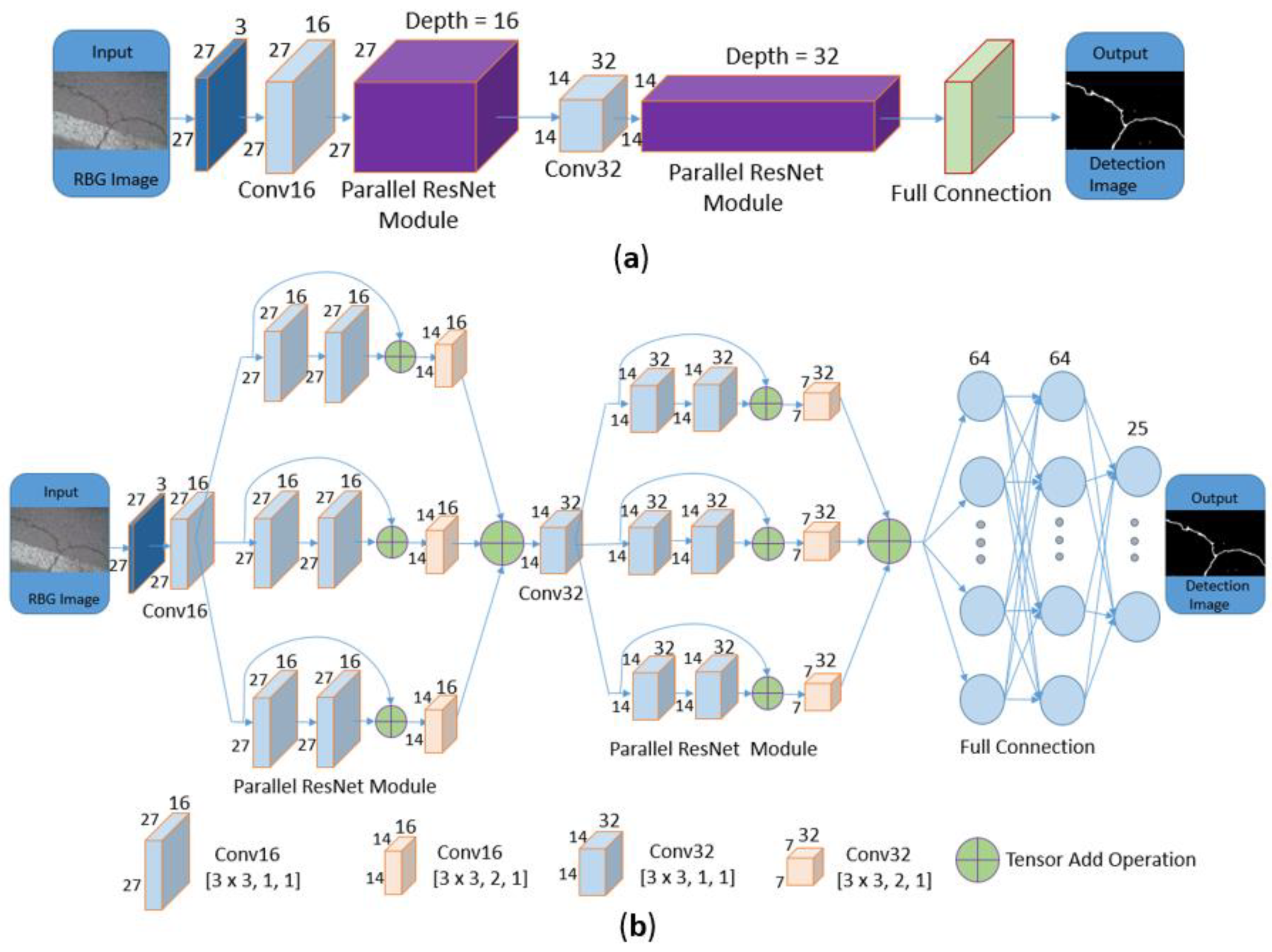
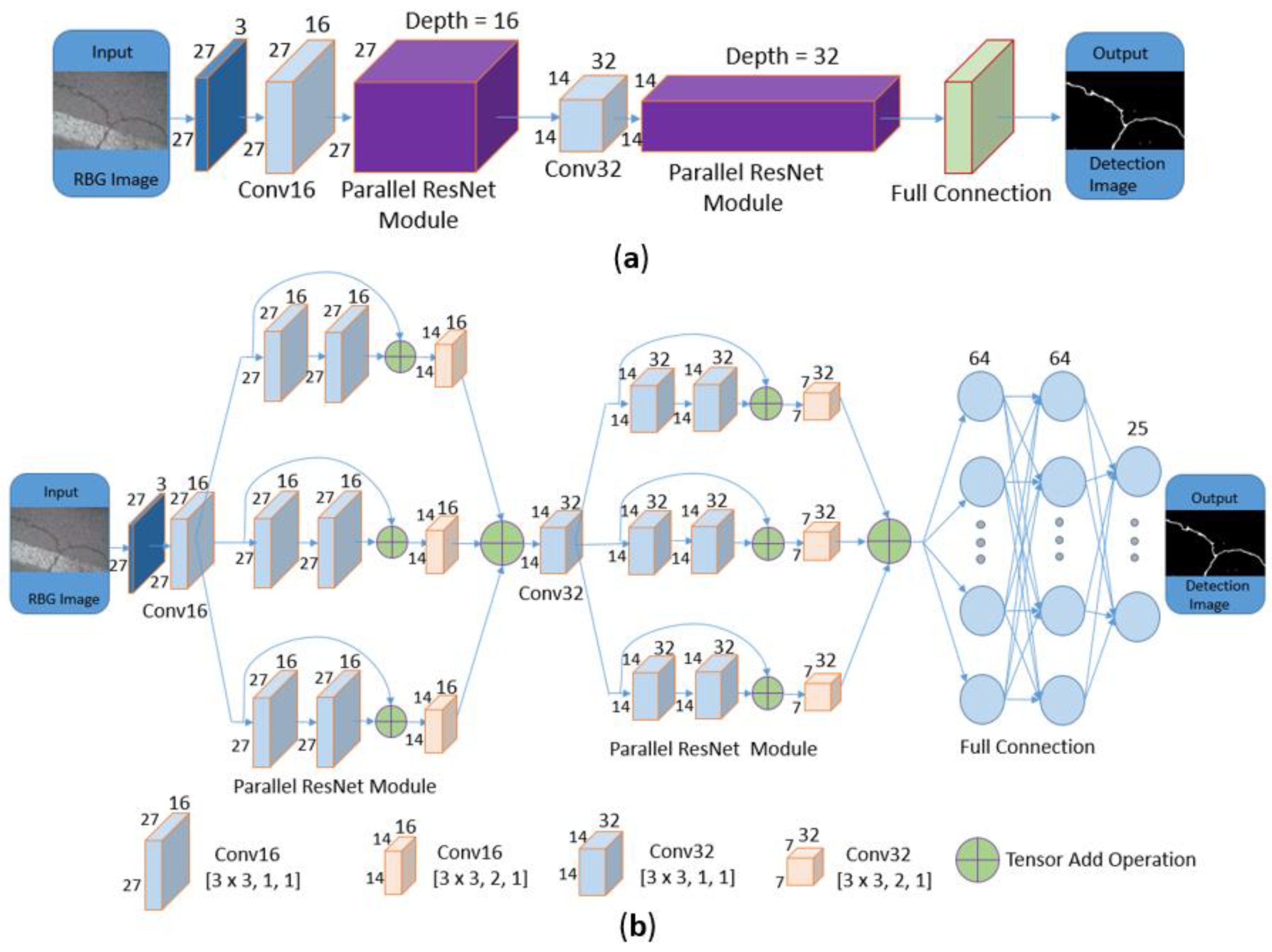
- Figure 4c, a Parallel ResNet module with three branches in parallel. The structure of each branch in the parallel module is the same. For example, the first parallel branch is composed of a residual block skipping two convolutional layers (Conv_A_1 and Conv_B_1), and a convolutional layer (Conv_1) with a stride of 2. Finally, through the add operation, the module outputs
- In the forward propagation of each branch, if the weights in the convolutional layer (Figure 2a) have not learned any information, it is equivalent to performing an identity transformation. If the convolutional layer has learned some useful knowledge, then it may have a better learning ability than the identity function;
- The skip connects change the output function of convolutional layer training from to . This ensures that the gradient calculated for does not tend to zero in the process of back propagation. In addition, in back propagation, the residual block is more sensitive to the change of output, and can adjust the weight more finely than the standard convolutional layer;
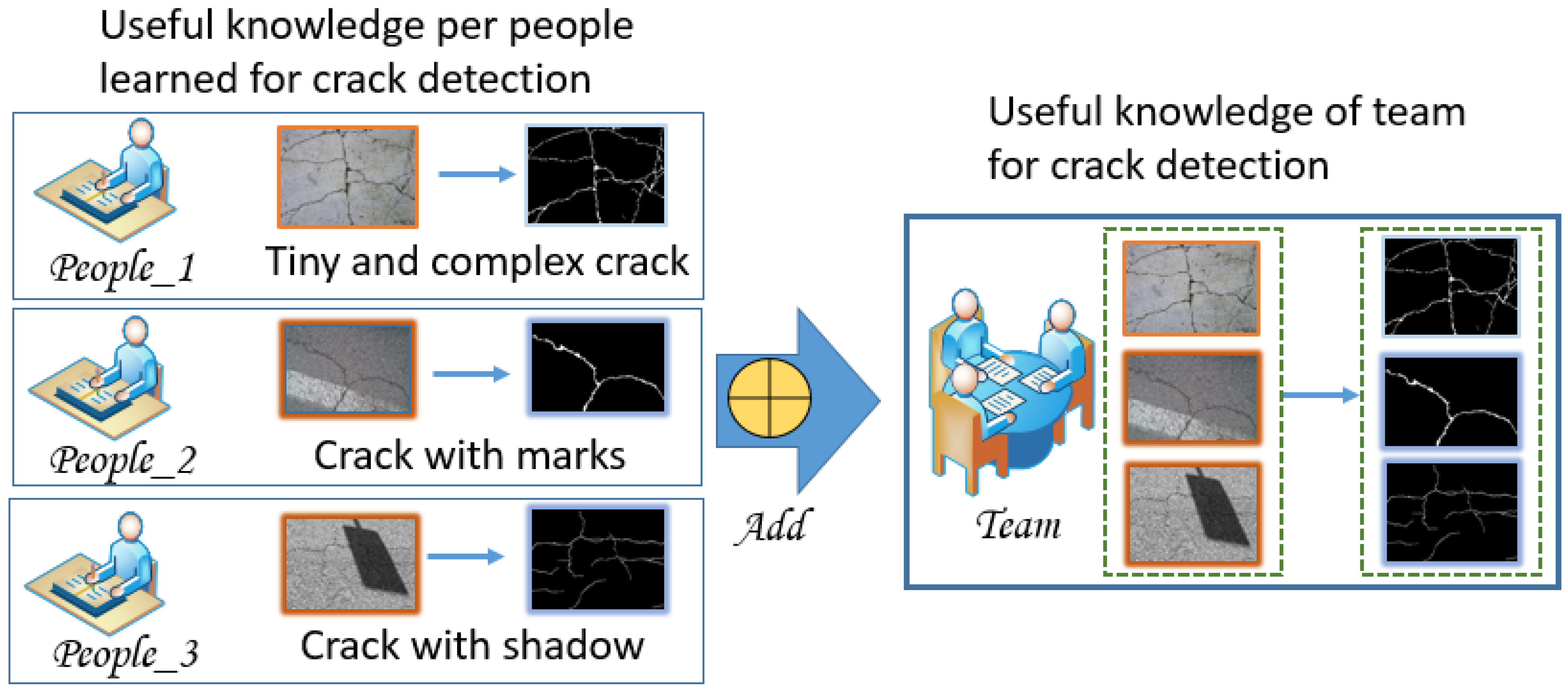
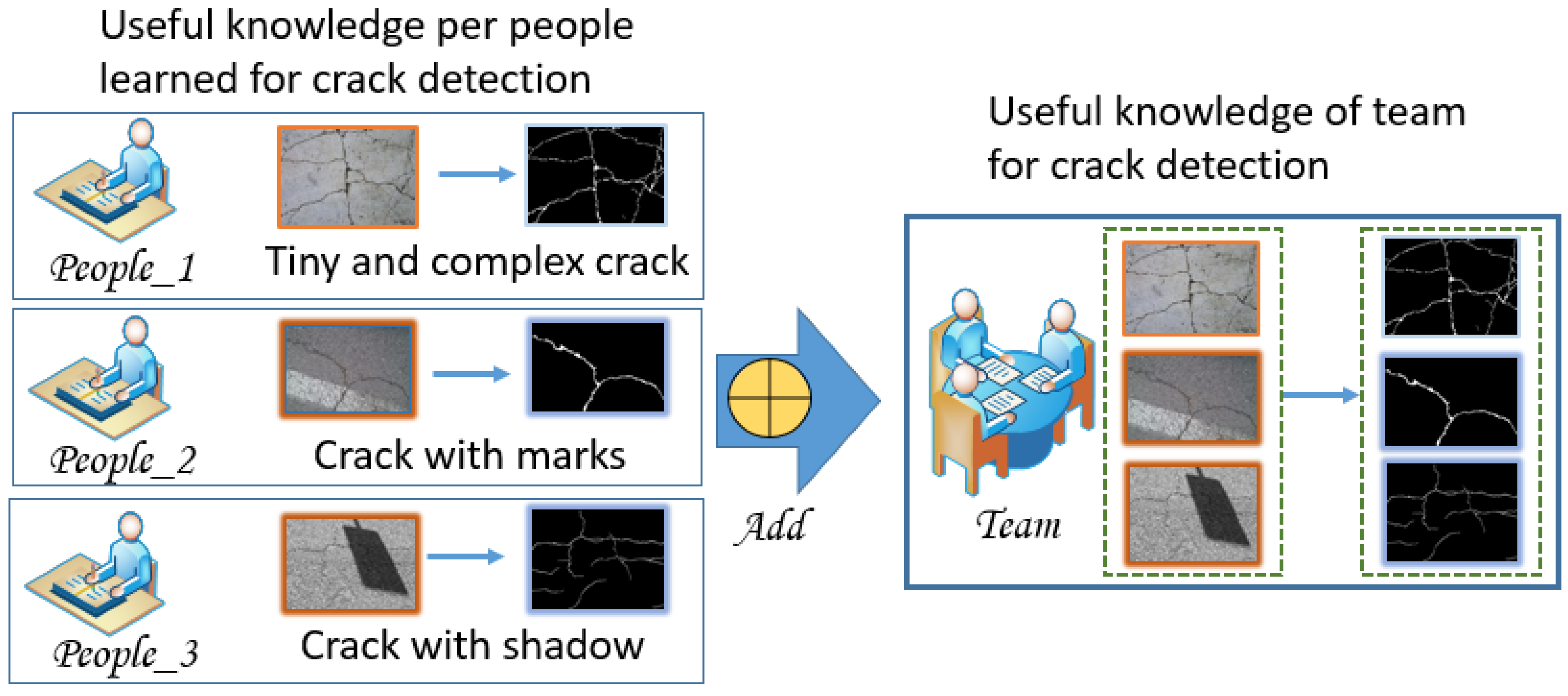
- A parallel structure, through multiple branches in parallel, can learn more useful knowledge and can identify crack features in the training and learning phases.
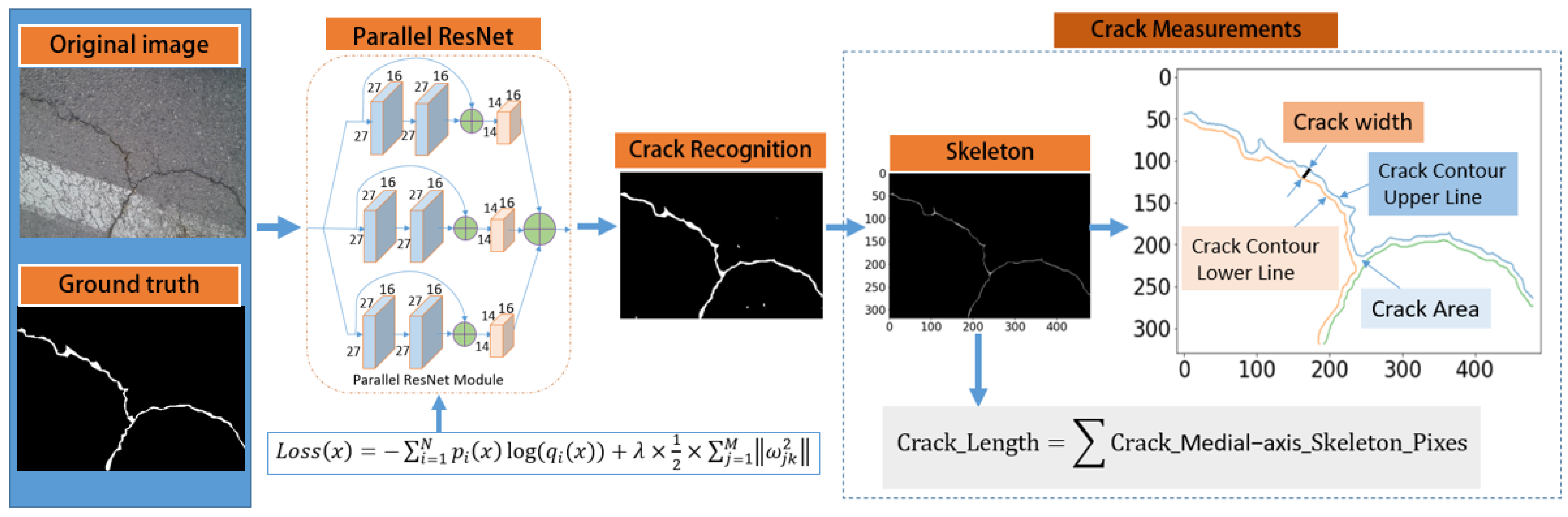
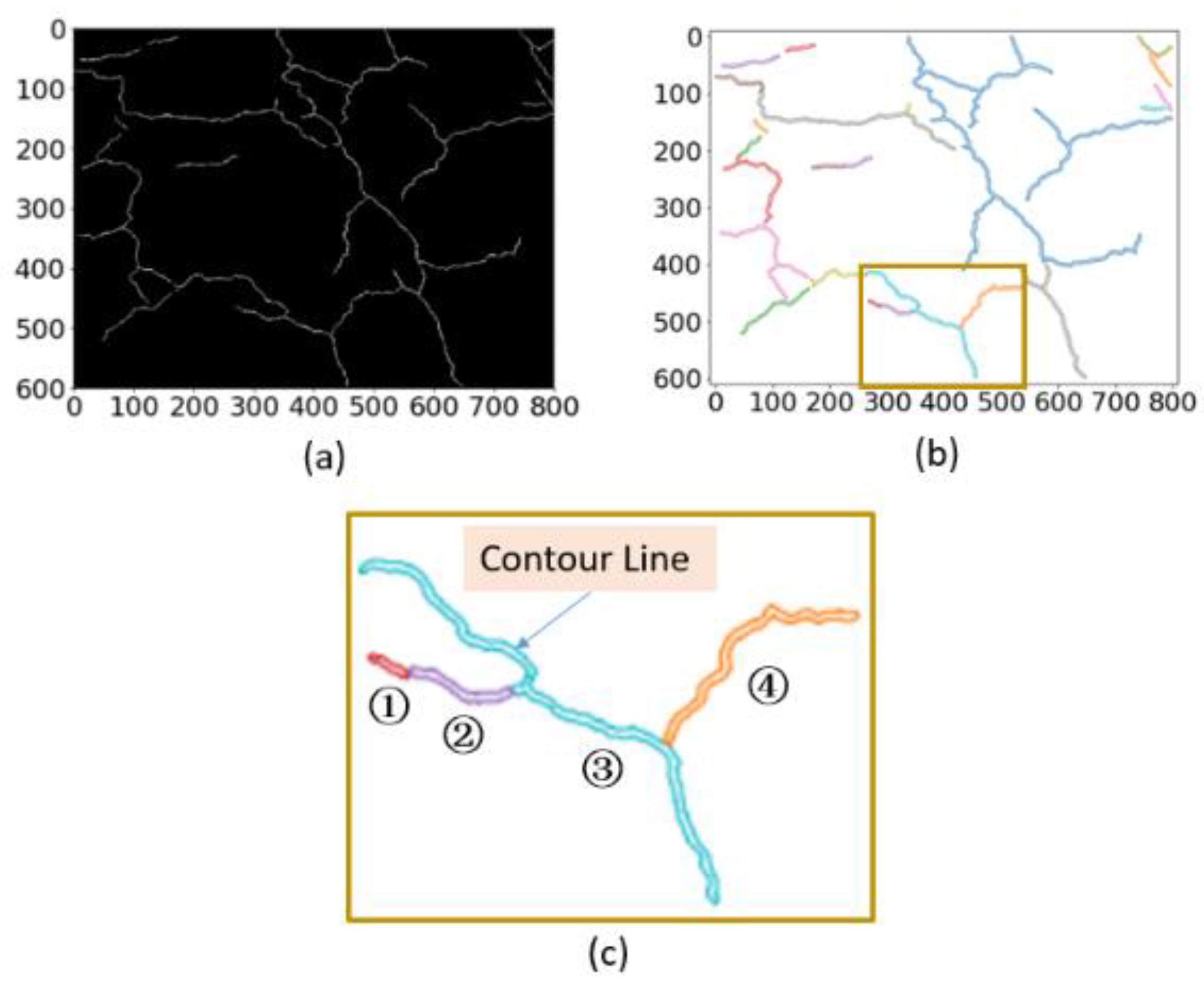
3.2. Crack Measurement Method
4. Experiments and Results
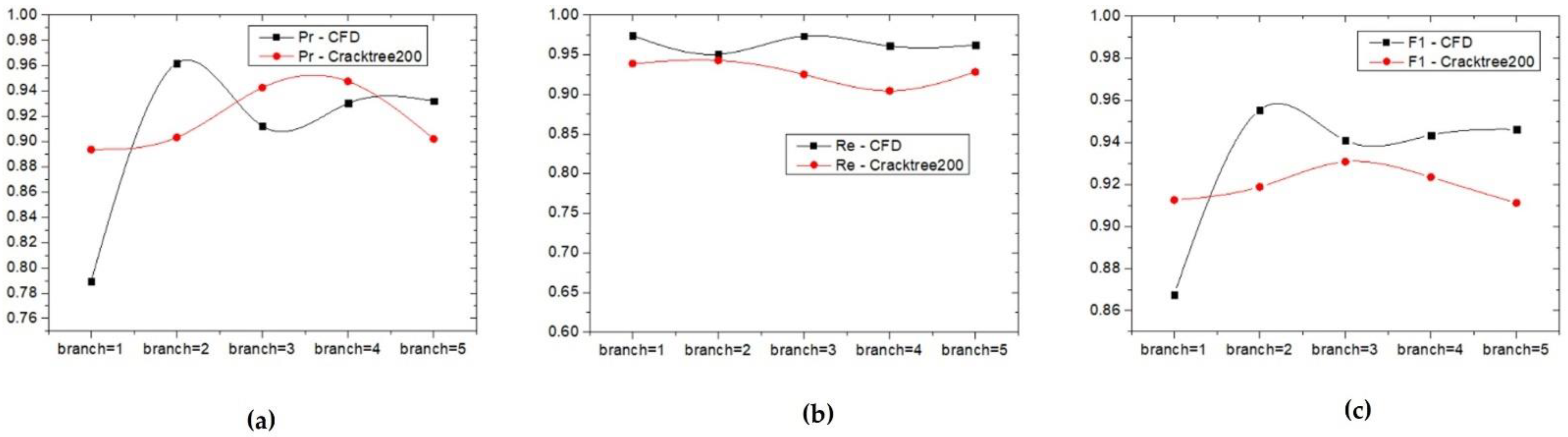
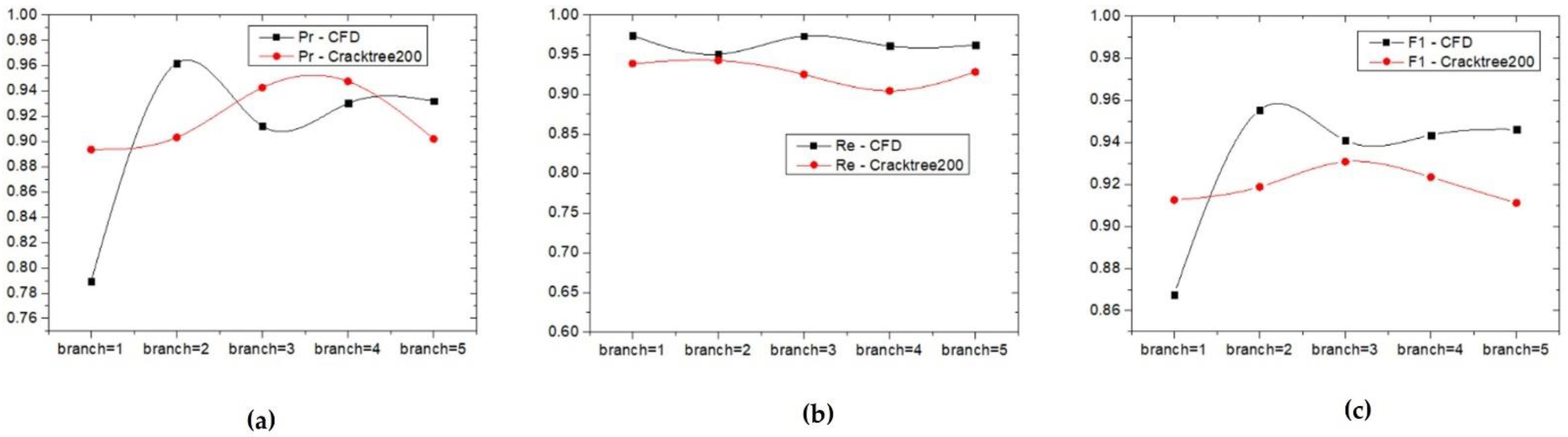
4.1. Multiple Branches of Parallel ResNet
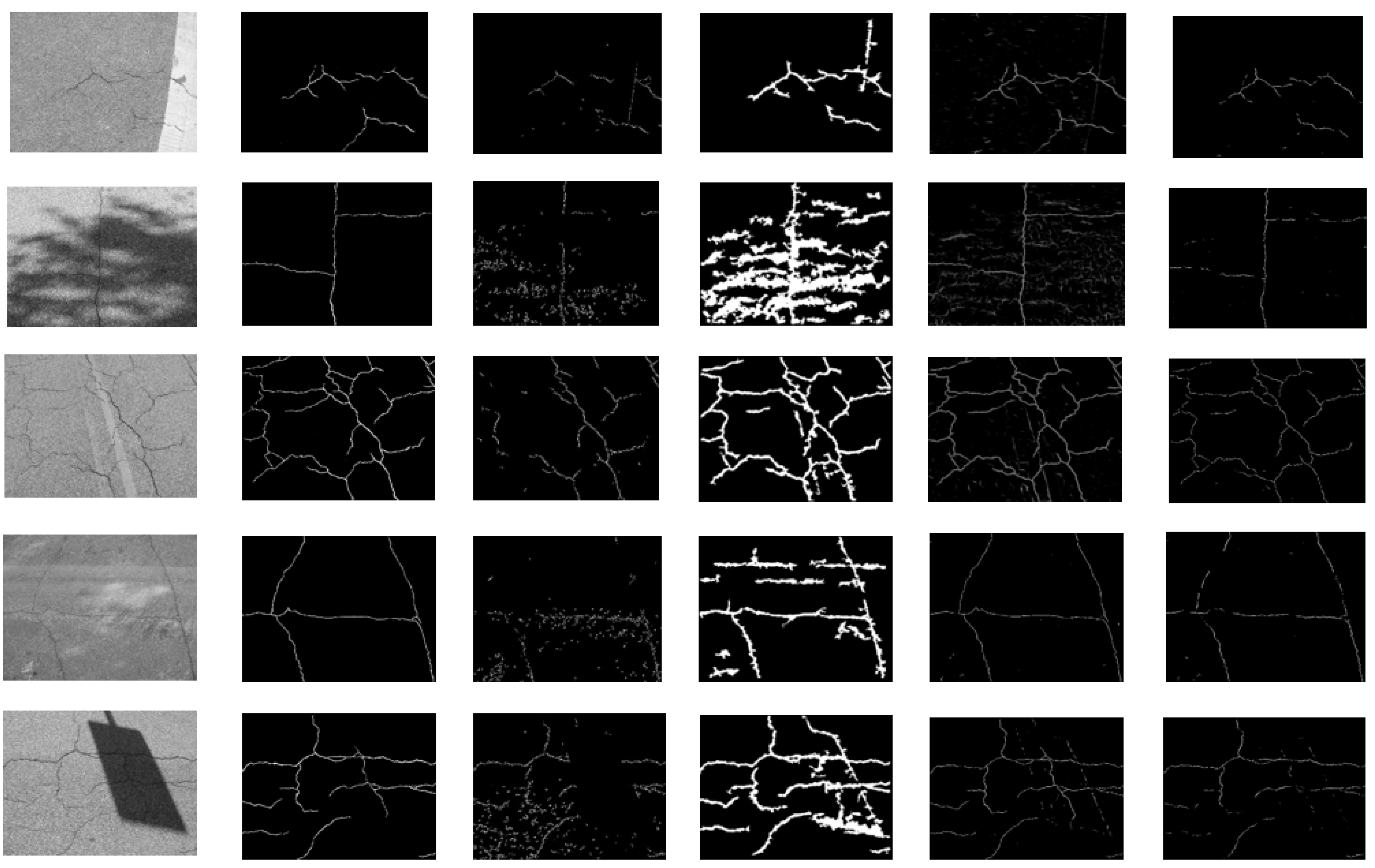
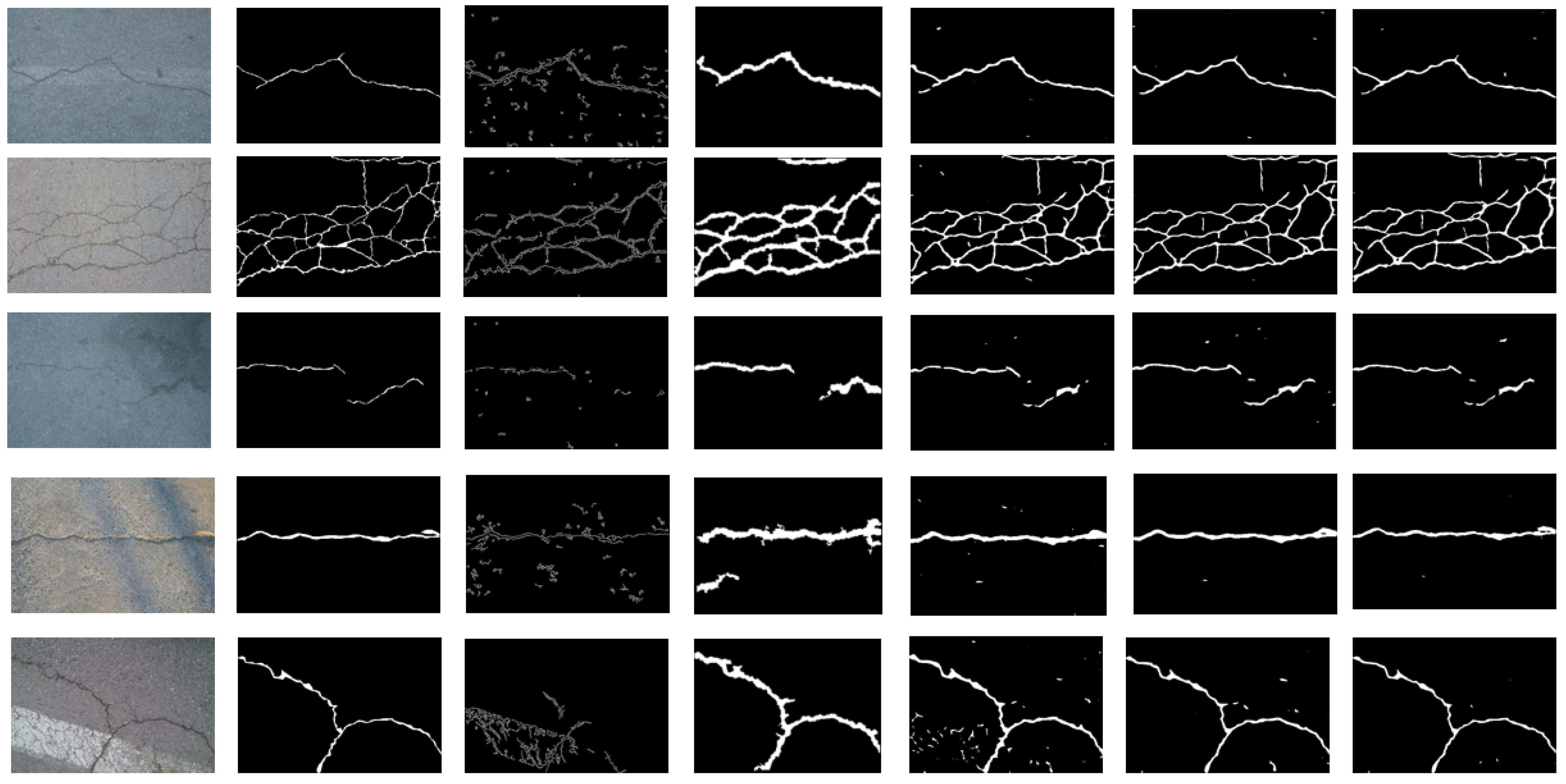
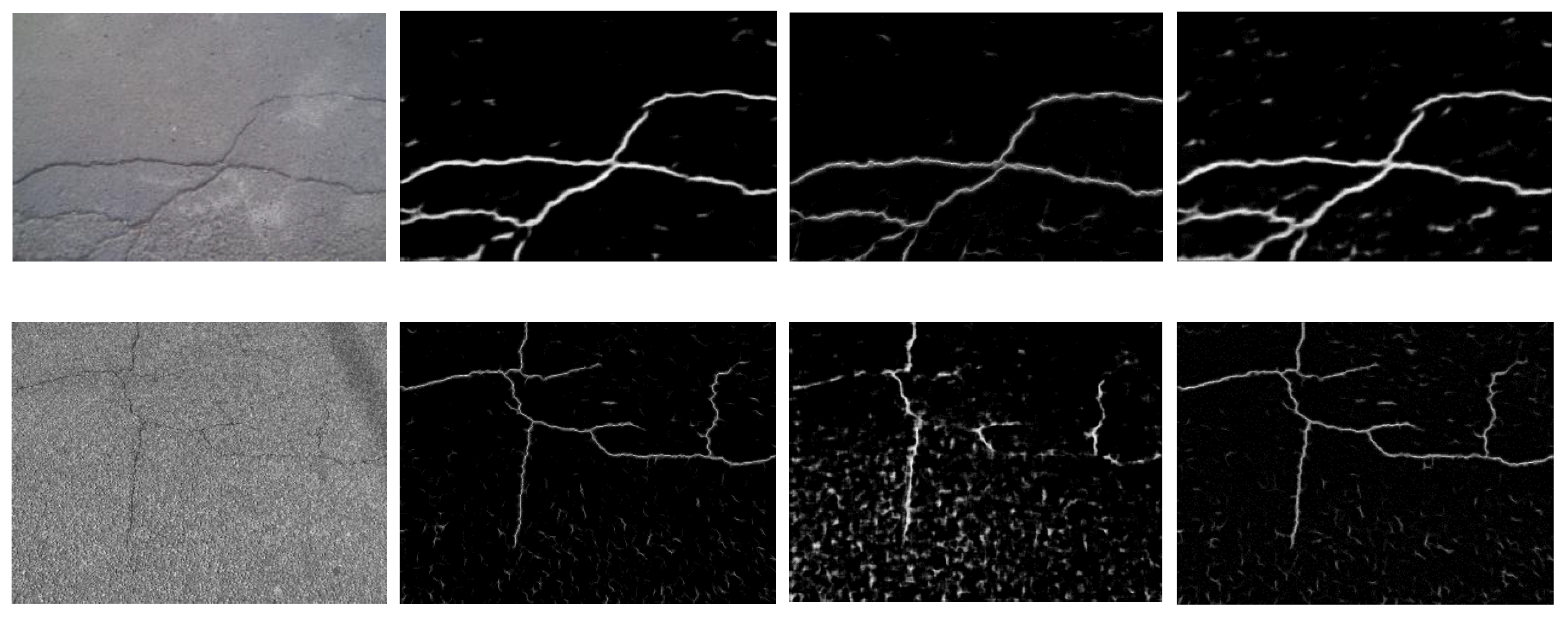
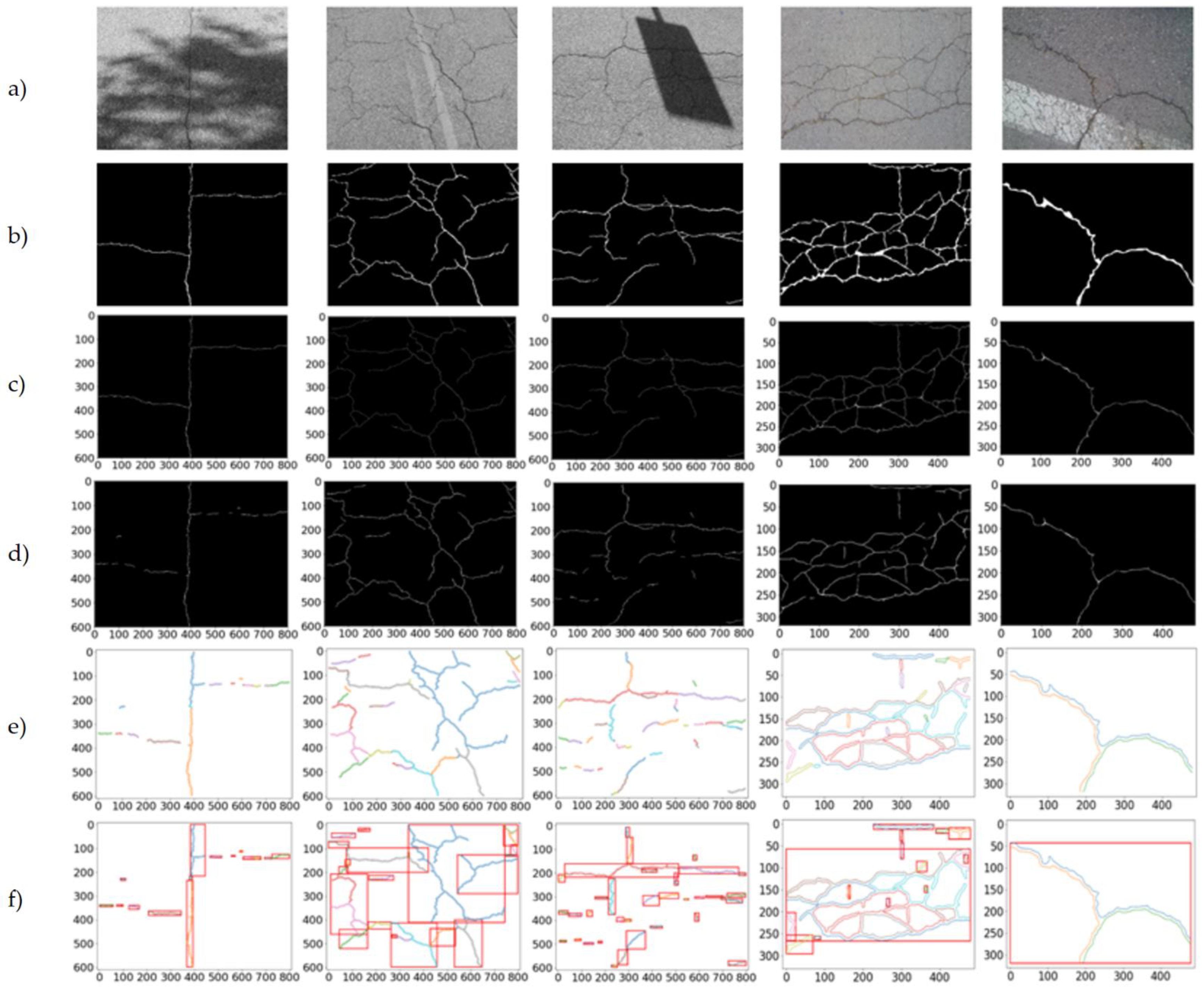
4.2. Experimental Results in Crack Detection
- For the CrackTree200 dataset, the best scores in all performance metrics were found (Precision = 94.27%, Recall = 92.52%, F1 = 93.08%);
- For the CFD dataset, the best scores were in Precision (96.21%) and F1 (95.63%); while the obtained value in Recall (95.12%) was a little bit smaller than that achieved by applying Ensemble Network (but fairly similar);
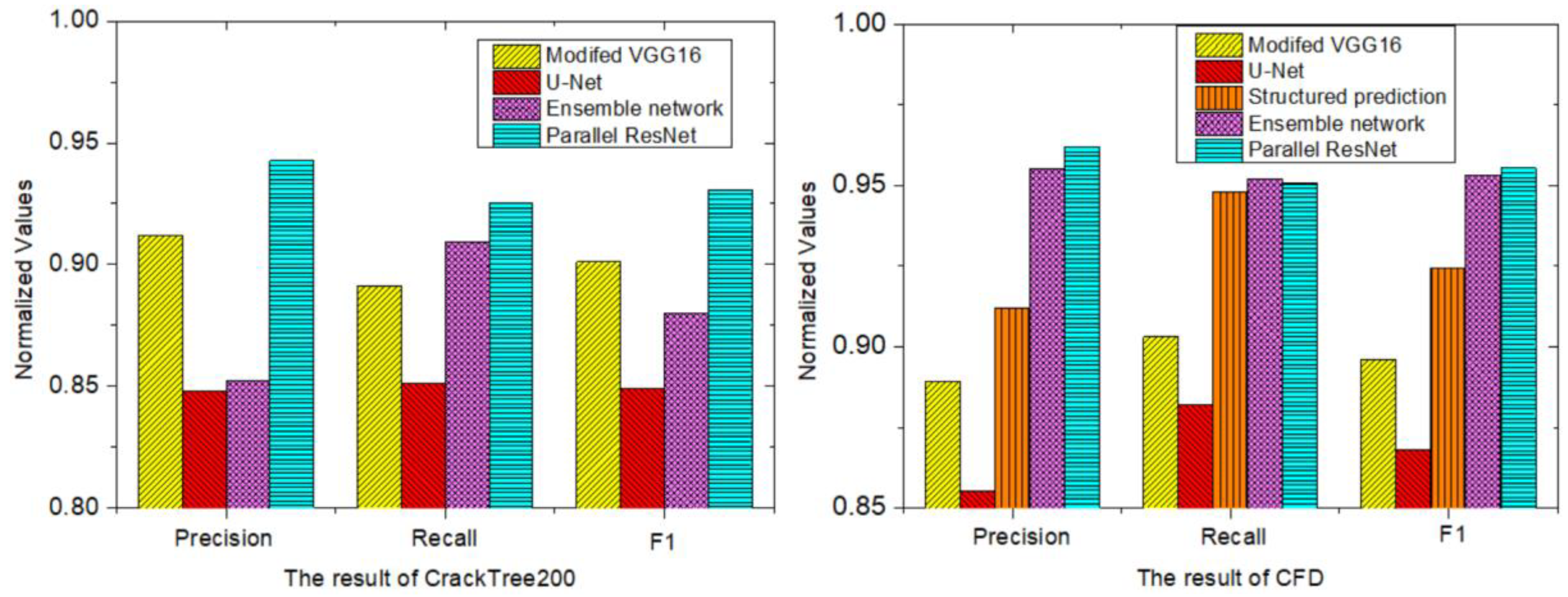
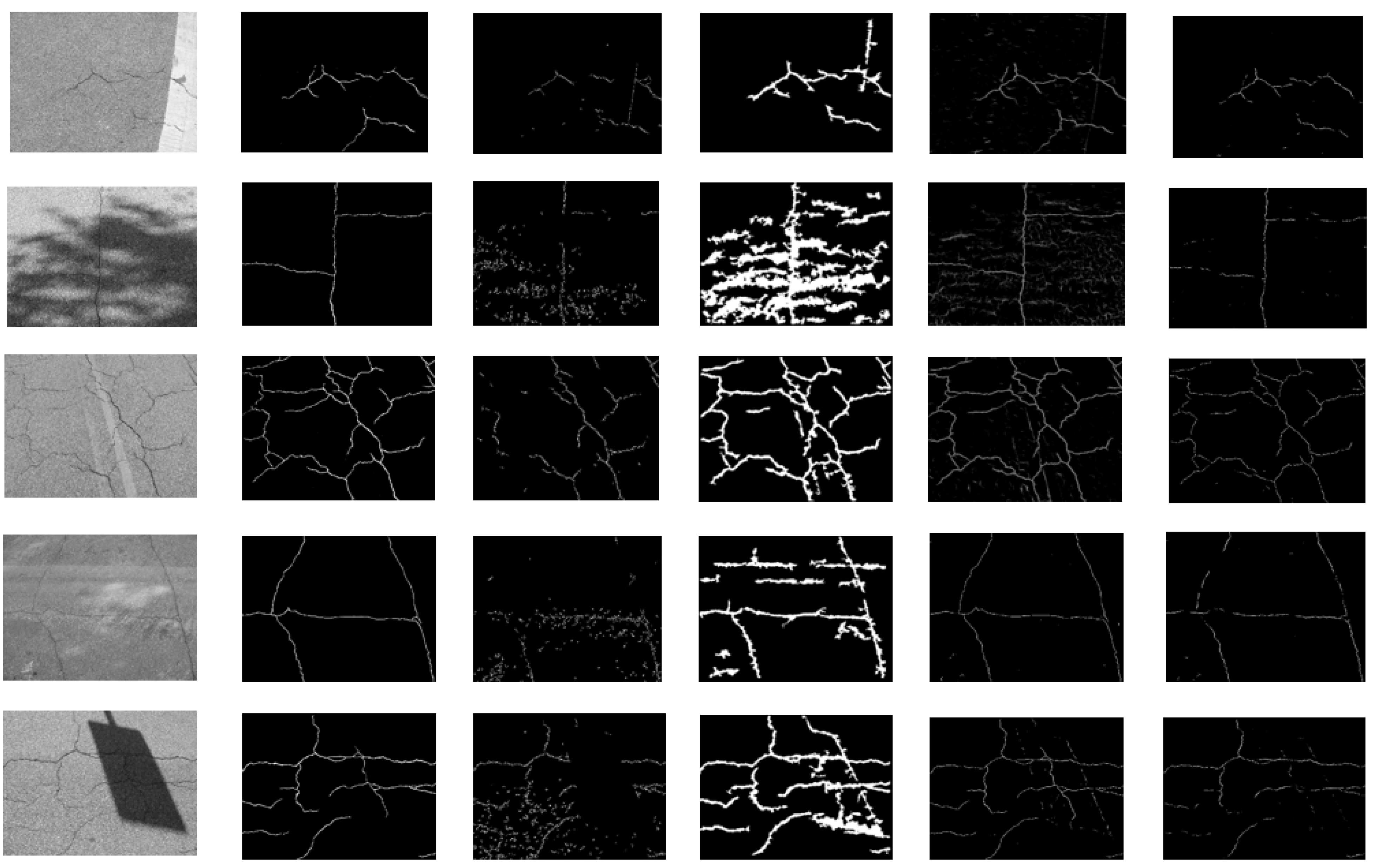
- Problems also arose for Structured Prediction, which failed in cracks detection for the CrackTree200 database: the main reason may be that the crack width is very small, and the noise and crack pixels are very close in the raw image;
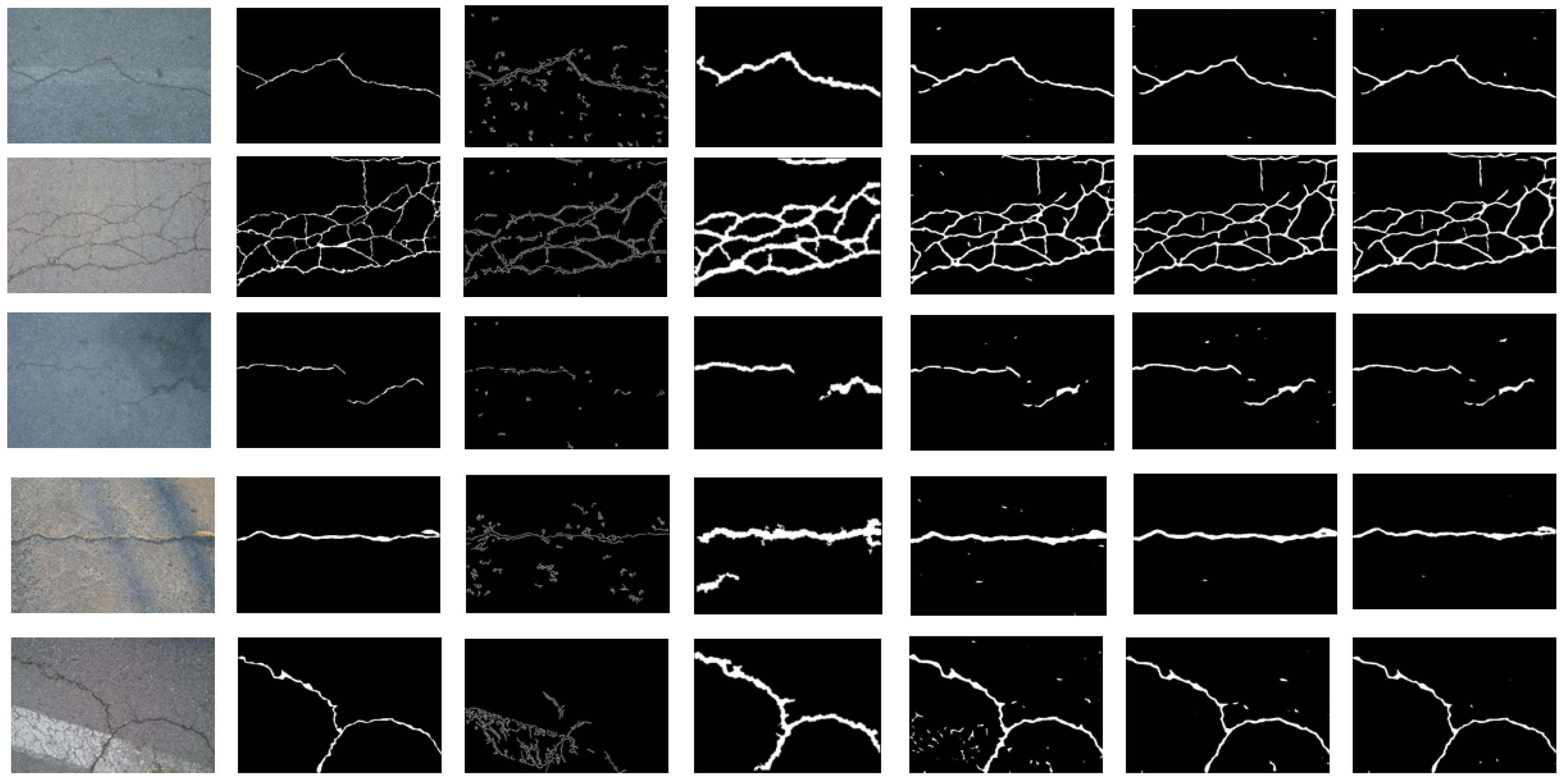
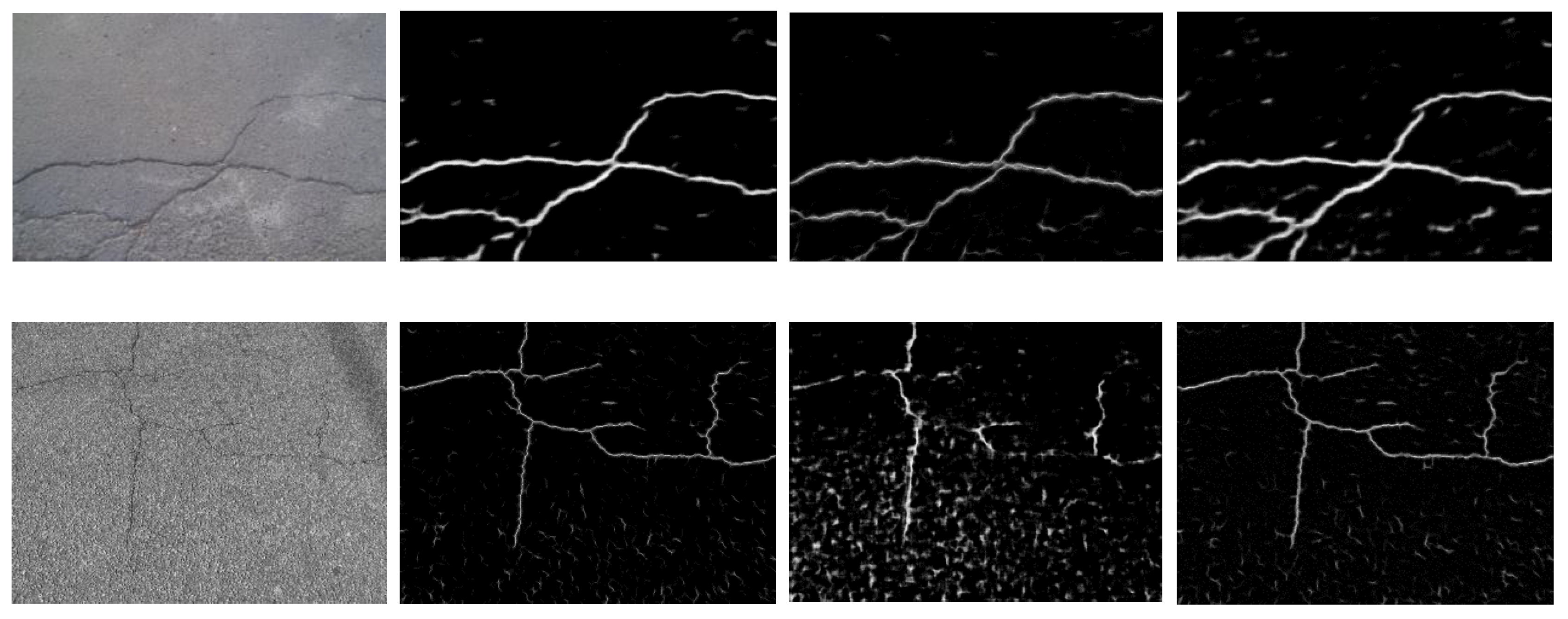
- At the same time, it can also be found that the crack detection ability based on the deep learning is much better than the traditional machine learning and the edge extraction algorithms, such as CrackForest, Canny, and Structured Prediction;
- The histogram in Figure 7 shows the results, in terms of evaluation parameters, limited to the deep learning-based methods considered in this paper.
4.2.1. Detection Analysis on the CrackTree200 Dataset
4.2.2. Detection Analysis on the CFD Dataset
4.2.3. Performance Evaluation of Parallel ResNet under Cross-Dataset Scenarios
- Training on CFD and testing on CrackTree200;
- Training on CrackTree200 and testing on CFD;
- Training and testing on a hybrid dataset from CFD and CrackTree200.
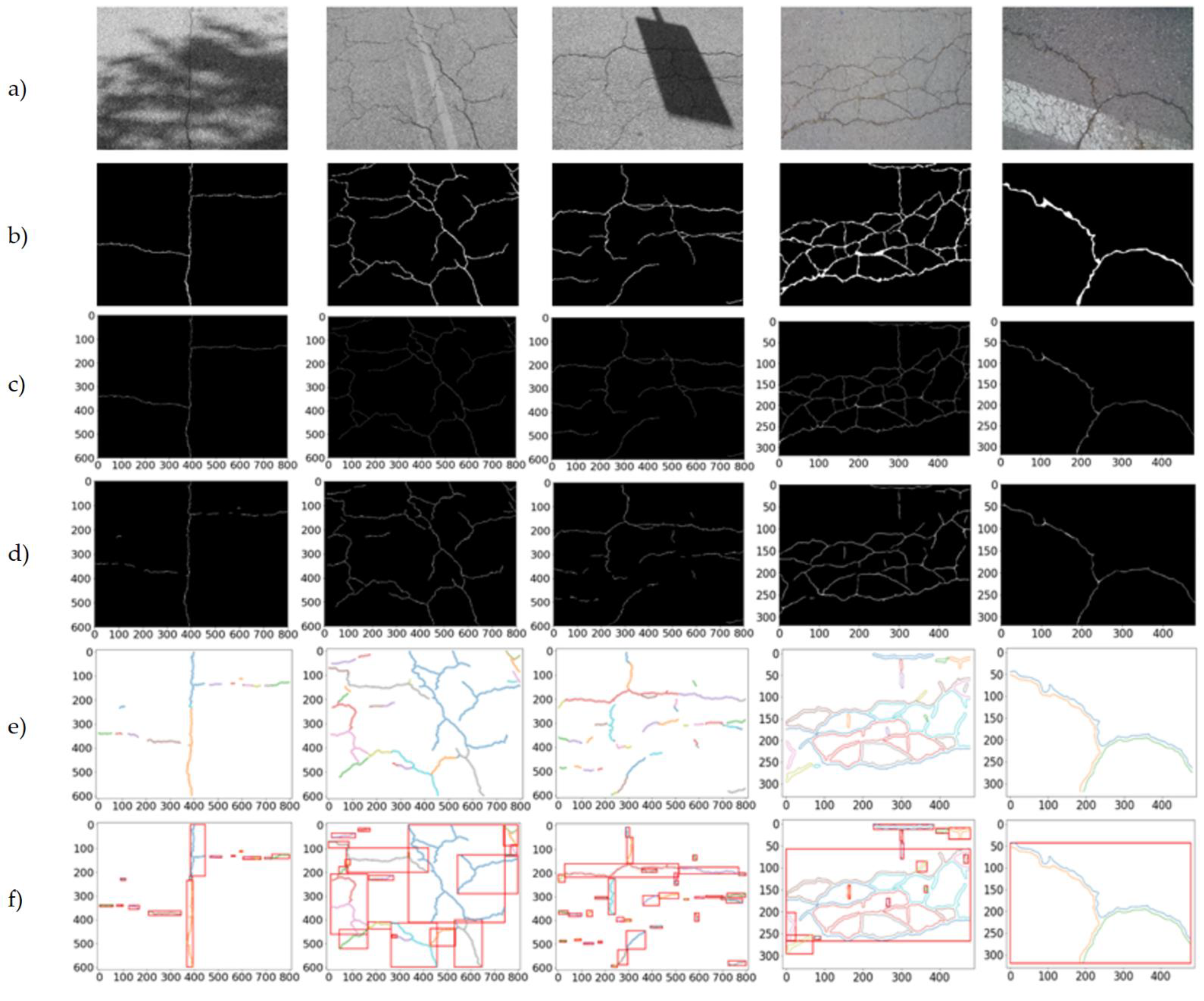
4.3. Experimental Results in Crack Measurement
5. Conclusions
- The maximum scores in Precision (94.27%), Recall (92.52%), and F1 (93.08%) using the CrackTree200 dataset;
- High values in Precision (96.21%), Recall (95.12%), and F1 (95.63%) using the CFD dataset.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bruno, S.; Del Serrone, G.; Di Mascio, P.; Loprencipe, G.; Ricci, E.; Moretti, L. Technical Proposal for Monitoring Thermal and Mechanical Stresses of a Runway Pavement. Sensors 2021, 21, 6797. [Google Scholar] [CrossRef] [PubMed]
- Bonin, G.; Polizzotti, S.; Loprencipe, G.; Folino, N.; Oliviero Rossi, C.; Teltayev, B.B. Development of a road asset management system in kazakhstan. In Transport Infrastructure and Systems—Proceedings of the AIIT International Congress on Transport Infrastructure and Systems, TIS 2017; CRC Press/Balkema: Leiden, The Netherlands, 2017; pp. 537–545. ISBN 978-1-138-03009-1. [Google Scholar]
- Jiang, C.; Tsai, Y.J. Enhanced Crack Segmentation Algorithm Using 3D Pavement Data. J. Comput. Civ. Eng. 2016, 30, 04015050. [Google Scholar] [CrossRef]
- Loprencipe, G.; Pantuso, A. A Specified Procedure for Distress Identification and Assessment for Urban Road Surfaces Based on PCI. Coatings 2017, 7, 65. [Google Scholar] [CrossRef] [Green Version]
- Wang, W.; Wang, M.; Li, H.; Zhao, H.; Wang, K.; He, C.; Wang, J.; Zheng, S.; Chen, J. Pavement crack image acquisition methods and crack extraction algorithms: A review. J. Traffic Transp. Eng. 2019, 6, 535–556. [Google Scholar] [CrossRef]
- Dong, Q.; Huang, B. Evaluation of Influence Factors on Crack Initiation of LTPP Resurfaced-Asphalt Pavements Using Parametric Survival Analysis. J. Perform. Constr. Facil. 2014, 28, 412–421. [Google Scholar] [CrossRef]
- ASTM. ASTM D6433-20; Standard Practice for Roads and Parking Lots Pavement Condition Index Surveys. ASTM International: West Conshohocken, PA, USA, 2020.
- Cheng, H.D.; Wang, J.; Hu, Y.G.; Glazier, C.; Shi, X.J.; Chen, X.W. Novel approach to pavement cracking detection based on neural network. Transp. Res. Rec. 2001, 1764, 119–127. [Google Scholar] [CrossRef]
- Subirats, P.; Dumoulin, J.; Legeay, V.; Barba, D. Automation of pavement surface crack detection using the continuous wavelet transform. In Proceedings of the International Conference on Image Processing, Atlanta, GA, USA, 8–11 October 2006; pp. 3037–3040. [Google Scholar] [CrossRef]
- Nguyen, T.S.; Avila, M.; Begot, S. Automatic detection and classification of defect on road pavement using anisotropy measure. In Proceedings of the European Signal Processing Conference, Glasgow, UK, 24–28 August 2009; pp. 617–621. [Google Scholar]
- Najafi Moghaddam Gilani, V.; Hosseinian, S.M.; Behbahani, H.; Hamedi, G.H. Prediction and pareto-based multi-objective optimization of moisture and fatigue damages of asphalt mixtures modified with nano hydrated lime. Constr. Build. Mater. 2020, 261, 120509. [Google Scholar] [CrossRef]
- Oliveira, H.; Correia, P.L. Automatic road crack detection and characterization. IEEE Trans. Intell. Transp. Syst. 2013, 14, 155–168. [Google Scholar] [CrossRef]
- Hosseinian, S.M.; Najafi Moghaddam Gilani, V.; Mehraban Joobani, P.; Arabani, M. Investigation of Moisture Sensitivity and Conductivity Properties of Inductive Asphalt Mixtures Containing Steel Wool Fiber. Adv. Civ. Eng. 2020, 2020, 1–9. [Google Scholar] [CrossRef]
- Loprencipe, G.; de Almeida Filho, F.G.V.; de Oliveira, R.H.; Bruno, S. Validation of a low-cost pavement monitoring inertial-based system for urban road networks. Sensors 2021, 21, 3127. [Google Scholar] [CrossRef]
- Dong, L.; Yu, G.; Ogunbona, P.; Li, W. An efficient iterative algorithm for image thresholding. Pattern Recognit. Lett. 2008, 29, 1311–1316. [Google Scholar] [CrossRef]
- Oliveira, H.; Correia, P.L. Automatic road crack segmentation using entropy and image dynamic thresholding. In Proceedings of the European Signal Processing Conference, Glasgow, UK, 24–28 August 2009; pp. 622–626. [Google Scholar]
- Tanaka, N.; Uematsu, K. A Crack Detection Method in Road Surface Images Using Morphology. In Proceedings of the IAPR Workshop on Machine Vision Applications, Chiba, Japan, 17–19 November 1998; pp. 1–4. [Google Scholar]
- Yang, C.; Wang, X.; Cheng, L.; Ma, H. Neural-Learning-Based Telerobot Control with Guaranteed Performance. IEEE Trans. Cybern. 2017, 47, 3148–3159. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhao, H.; Qin, G.; Wang, X. Improvement of canny algorithm based on pavement edge detection. In Proceedings of the 2010 3rd International Congress on Image and Signal Processing, CISP 2010, Yantai, China, 16–18 October 2010; pp. 964–967. [Google Scholar] [CrossRef]
- Wang, C.; Wang, X.; Zhou, X.; Li, Z. The Aircraft Skin Crack Inspection Based on Different-Source Sensors and Support Vector Machines. J. Nondestruct. Eval. 2016, 35, 46. [Google Scholar] [CrossRef]
- Kumar, A.; Kim, J.; Lyndon, D.; Fulham, M.; Feng, D. An Ensemble of Fine-Tuned Convolutional Neural Networks for Medical Image Classification. IEEE J. Biomed. Health Inform. 2017, 21, 31–40. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Szegedy, C.; Vanhoucke, V.; Ioffe, S.; Shlens, J.; Wojna, Z. Rethinking the Inception Architecture for Computer Vision. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 2818–2826. [Google Scholar] [CrossRef] [Green Version]
- Qu, Z.; Mei, J.; Liu, L.; Zhou, D.-Y. Crack Detection of Concrete Pavement With Cross-Entropy Loss Function and Improved VGG16 Network Model. IEEE Access 2020, 8, 54564–54573. [Google Scholar] [CrossRef]
- Shi, Y.; Cui, L.; Qi, Z.; Meng, F.; Chen, Z. Automatic road crack detection using random structured forests. IEEE Trans. Intell. Transp. Syst. 2016, 17, 3434–3445. [Google Scholar] [CrossRef]
- Wu, S.; Fang, J.; Zheng, X.; Li, X. Sample and Structure-Guided Network for Road Crack Detection. IEEE Access 2019, 7, 130032–130043. [Google Scholar] [CrossRef]
- Fujita, Y.; Hamamoto, Y. A robust automatic crack detection method from noisy concrete surfaces. Mach. Vis. Appl. 2011, 22, 245–254. [Google Scholar] [CrossRef]
- Jahanshahi, M.R.; Masri, S.F. A new methodology for non-contact accurate crack width measurement through photogrammetry for automated structural safety evaluation. Smart Mater. Struct. 2013, 22, 035019. [Google Scholar] [CrossRef]
- Yang, X.; Li, H.; Yu, Y.; Luo, X.; Huang, T.; Yang, X. Automatic Pixel-Level Crack Detection and Measurement Using Fully Convolutional Network. Comput.-Aided Civ. Infrastruct. Eng. 2018, 33, 1090–1109. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar] [CrossRef] [Green Version]
- Fan, Z.; Li, C.; Chen, Y.; Di Mascio, P.; Chen, X.; Zhu, G.; Loprencipe, G. Ensemble of deep convolutional neural networks for automatic pavement crack detection and measurement. Coatings 2020, 10, 152. [Google Scholar] [CrossRef] [Green Version]
- Hilditch, C. Comparison of thinning algorithms on a parallel processor. Image Vis. Comput. 1983, 1, 115–132. [Google Scholar] [CrossRef]
- Kamaliardakani, M.; Sun, L.; Ardakani, M.K. Sealed-Crack Detection Algorithm Using Heuristic Thresholding Approach. J. Comput. Civ. Eng. 2016, 30, 04014110. [Google Scholar] [CrossRef]
- Katiyar, S.K.; Arun, P.V. Comparative analysis of common edge detection techniques in context of object extraction. IEEE Trans. Geosci. Remote Sens. 2014, 50, 68–79. [Google Scholar]
- Qu, Z.; Lin, L.; Guo, Y. Algorithm of Image Crack Detection Based on Morphology and Region Extends. Comput. Sci. 2014, 41, 297–300. [Google Scholar]
- Fan, Z.; Li, C.; Chen, Y.; Wei, J.; Loprencipe, G.; Chen, X.; Di Mascio, P. Automatic crack detection on road pavements using encoder-decoder architecture. Materials 2020, 13, 2960. [Google Scholar] [CrossRef]
- Kass, M.; Witkin, A.; Terzopoulos, D. Snakes: Active contour models. Int. J. Comput. Vis. 1988, 1, 321–331. [Google Scholar] [CrossRef]
- Amhaz, R.; Chambon, S.; Idier, J.; Baltazart, V. A new minimal path selection algorithm for automatic crack detection on pavement images. In Proceedings of the 2014 IEEE International Conference on Image Processing, ICIP 2014, Paris, France, 27–30 October 2014; pp. 788–792. [Google Scholar] [CrossRef] [Green Version]
- Nguyen, T.S.; Begot, S.; Duculty, F.; Avila, M. Free-Form Anisotropy: A New Method for Crack Detection on Pavement Surface Images. In Proceedings of the 18th IEEE International Conference On Image Processing, Brussels, Belgium, 11–14 September 2011; pp. 1093–1096. [Google Scholar]
- Acosta, J.A.; Figueroa, J.L.; Mullen, R.L. Low-Cost Video Image Processing System for Evaluating Pavement Surface Distress. Transp. Res. Rec. 1992, 1348, 63–72. [Google Scholar]
- Deutschl, E.; Gasser, C.; Niel, A.; Werschonig, J. Defect detection on rail surfaces by a vision based system. In Proceedings of the IEEE Intelligent Vehicles Symposium, Parma, Italy, 14–17 June 2004; pp. 507–511. [Google Scholar] [CrossRef]
- Delagnes, P.; Barba, D. Markov random field for rectilinear structure extraction in pavement distress image analysis. IEEE Int. Conf. Image Processing 1996, 1, 446–449. [Google Scholar] [CrossRef]
- Bray, J.; Verma, B.; Li, X.; He, W. A Neural Network based Technique for Automatic Classification of Road Cracks. IEEE Xplore 2006, 907–912. [Google Scholar] [CrossRef]
- Chambon, S.; Moliard, J.M. Automatic road pavement assessment with image processing: Review and comparison. Int. J. Geophys. 2011, 2011, 989354. [Google Scholar] [CrossRef] [Green Version]
- Liu, Z.; Cao, Y.; Wang, Y.; Wang, W. Computer vision-based concrete crack detection using U-net fully convolutional networks. Autom. Constr. 2019, 104, 129–139. [Google Scholar] [CrossRef]
- Liu, J.; Yang, X.; Lau, S.; Wang, X.; Luo, S.; Lee, V.C.; Ding, L. Automated pavement crack detection and segmentation based on two-step convolutional neural network. Comput.-Aided Civ. Infrastruct. Eng. 2020, 35, 1291–1305. [Google Scholar] [CrossRef]
- Lau, S.L.H.; Chong, E.K.P.; Yang, X.; Wang, X. Automated Pavement Crack Segmentation Using U-Net-Based Convolutional Neural Network. IEEE Access 2020, 8, 114892–114899. [Google Scholar] [CrossRef]
- Song, W.; Jia, G.; Jia, D.; Zhu, H. Automatic Pavement Crack Detection and Classification Using Multiscale Feature Attention Network. IEEE Access 2019, 7, 171001–171012. [Google Scholar] [CrossRef]
- Veit, A.; Wilber, M.; Belongie, S. Residual networks behave like ensembles of relatively shallow networks. In Proceedings of the Advances in Neural Information Processing Systems, Barcelona, Spain, 5–10 December 2016; pp. 550–558. [Google Scholar]
- Shan, B.; Zheng, S.; Ou, J. A stereovision-based crack width detection approach for concrete surface assessment. KSCE J. Civ. Eng. 2016, 20, 803–812. [Google Scholar] [CrossRef]
- Cho, H.; Yoon, H.J.; Jung, J.Y. Image-Based Crack Detection Using Crack Width Transform (CWT) Algorithm. IEEE Access 2018, 6, 60100–60114. [Google Scholar] [CrossRef]
- Peleg, S.; Rosenfeld, A. A Min-Max Medial Axis Transformation. IEEE Trans. Pattern Anal. Mach. Intell. 1981, PAMI-3, 208–210. [Google Scholar] [CrossRef]
- Thawonmas, R.; Hirano, M.; Kurashige, M. Cellular automata and Hilditch thinning for extraction of user paths in online games. In Proceedings of the 5th ACM SIGCOMM Workshop on Network and System Support for Games, NetGames ’06. Singapore, 30–31 October 2006. [Google Scholar] [CrossRef]
- Zhang, T.Y.; Suen, C.Y. A fast parallel algorithm for thinning digital patterns. Commun. ACM 1984, 27, 236–239. [Google Scholar] [CrossRef]
- Akhavan, A.; Shafaatian, S.M.H.; Rajabipour, F. Quantifying the effects of crack width, tortuosity, and roughness on water permeability of cracked mortars. Cem. Concr. Res. 2012, 42, 313–320. [Google Scholar] [CrossRef]
- Zou, Q.; Cao, Y.; Li, Q.; Mao, Q.; Wang, S. CrackTree: Automatic crack detection from pavement images. Pattern Recognit. Lett. 2012, 33, 227–238. [Google Scholar] [CrossRef]
- Fan, Z.; Wu, Y.; Lu, J.; Li, W. Automatic Pavement Crack Detection Based on Structured Prediction with the Convolutional Neural Network. arXiv 2018, arXiv:1802.02208. [Google Scholar]
- Amhaz, R.; Chambon, S.; Idier, J.; Baltazart, V. Automatic Crack Detection on Two-Dimensional Pavement Images: An Algorithm Based on Minimal Path Selection. IEEE Trans. Intell. Transp. Syst. 2016, 17, 2718–2729. [Google Scholar] [CrossRef] [Green Version]
- Moghaddam Gilani, V.N.; Hosseinian, S.M.; Hamedi, G.H.; Safari, D. Presentation of Predictive Models for Two-objective Optimization of Moisture and Fatigue Damages Caused by Deicers in Asphalt Mixtures. J. Test. Eval. 2021, 49, 20200448. [Google Scholar] [CrossRef]
- Najafi Moghaddam Gilani, V.; Hosseinian, S.M.; Safari, D.; Bagheri Movahhed, M. Investigation of the Impact of Deicer Materials on Thermodynamic Parameters and Its Relationship with Moisture Susceptibility in Modified Asphalt Mixtures by Carbon Nanotube. Arab J. Sci. Eng. 2021, 46, 4489–4502. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Architecture of Parallel ResNet | ||
| Input (27 × 27 RGB image) | ||
| Conv16 [3 × 3, 1, 1] | ||
| Conv_A_1 16 [3 × 3, 1, 1] | Conv_A_2 16 [3 × 3, 1, 1] | Conv_A_3 16 [3 × 3, 1, 1] |
| Conv_B_1 16 [3 × 3, 1, 1] | Conv_B_2 16 [3 × 3, 1, 1] | Conv_B_3 16 [3 × 3, 1, 1] |
| Conv16 | Conv16 | Conv16 |
| Conv_1 16 [3 × 3, 2, 1] | Conv_2 16 [3 × 3, 2, 1] | Conv_3 16 [3 × 3, 2, 1] |
| Conv32 [3 × 3, 1, 1] | ||
| Conv_A_1 32 [3 × 3, 1, 1] | Conv_A_2 32 [3 × 3, 1, 1] | Conv_A_3 32 [3 × 3, 1, 1] |
| Conv_B_1 32 [3 × 3, 1, 1] | Conv_B_2 32 [3 × 3, 1, 1] | Conv_B_3 32 [3 × 3, 1, 1] |
| Conv32 | Conv32 | Conv32 |
| Conv_1 32 [3 × 3, 2, 1] | Conv_2 32 [3 × 3, 2, 1] | Conv_3 32 [3 × 3, 2, 1] |
| FC-64 | ||
| FC-64 | ||
| FC-25 | ||
| Output (5 × 5 structured prediction) | ||
| Operation Name | Function | Action |
|---|---|---|
| Dilation | Remove gaps and holes. | |
| Erosion | Minimize the inference of noise points. | |
| Opening | The contour becomes smooth, the narrow discontinuity is broken, and the elongated crack is eliminated. | |
| Closing | Smooth contour lines, remove smaller holes and fill up the breaks in contour lines |
| Step Number | Crack Measurement Process |
|---|---|
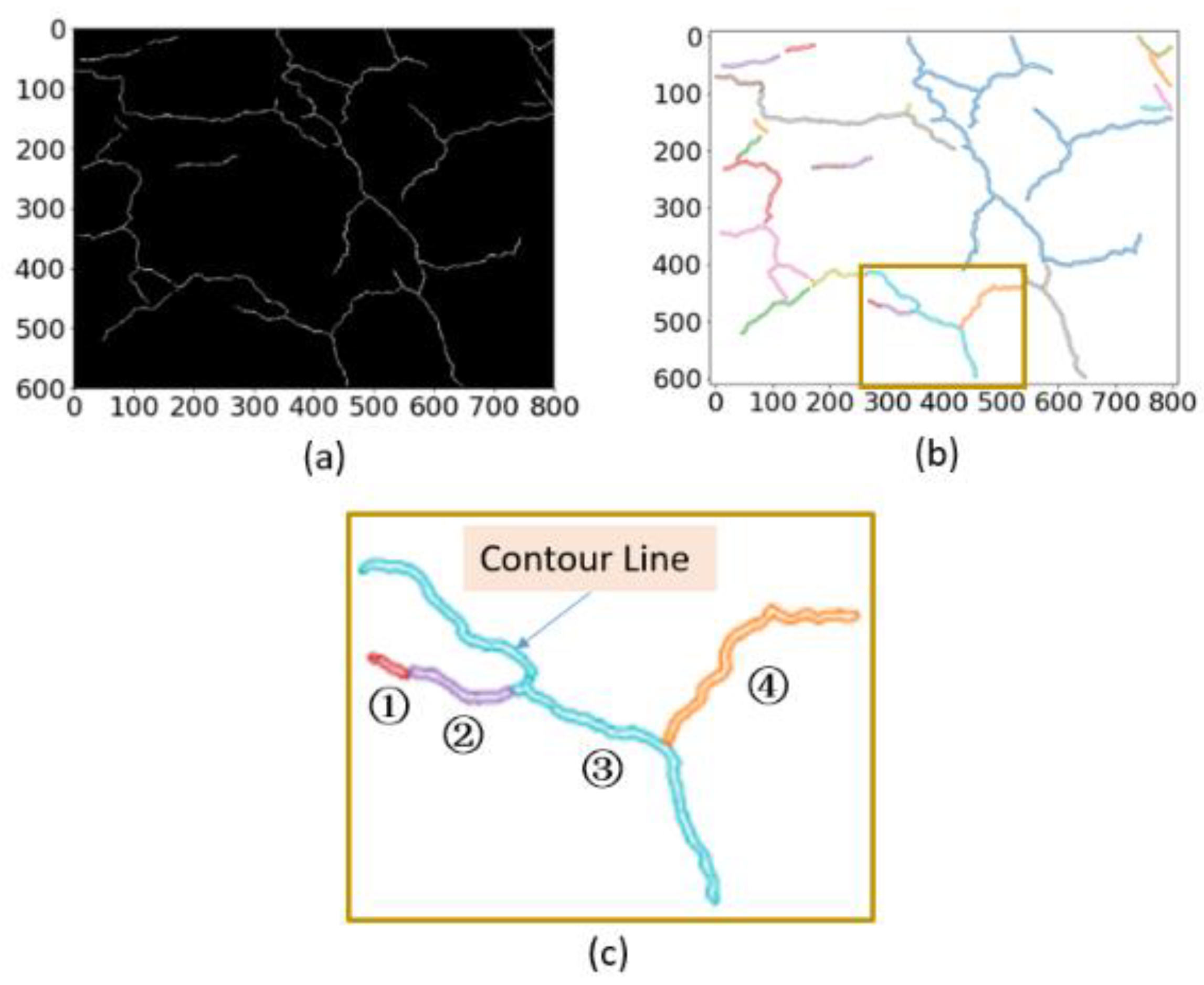
| 1 | The cracks are segmented by mathematical morphology, and the contour of the cracks in the connected region is extracted. |
| 2 | Parallel thinning algorithm for crack thinning. |
| 3 | Crack skeleton extraction based on single pixel width. |
| 4 | The crack length is calculated according to Equation (14). |
| 5 | Calculation of maximum width of crack by vertical line method of crack skeleton. |
| 6 | Based on the pixel statistics, the area of the crack and circumscribed quadrilateral is calculated, and the average width of the crack is calculated according to Equation (15). |
| Evaluation Parameter | Formula |
|---|---|
| Precision | |
| Recall | |
| F1 |
| Number of Branches | CrackTree200 | CFD | ||||
|---|---|---|---|---|---|---|
| Precision | Recall | F1 | Precision | Recall | F1 | |
| 1 | 0.8936 | 0.9389 | 0.9126 | 0.8095 | 0.9743 | 0.8716 |
| 2 | 0.9033 | 0.9429 | 0.9189 | 0.9621 | 0.9512 | 0.9563 |
| 3 | 0.9427 | 0.9252 | 0.9308 | 0.9237 | 0.9723 | 0.9465 |
| 4 | 0.9476 | 0.9046 | 0.9235 | 0.9323 | 0.9581 | 0.9436 |
| 5 | 0.9021 | 0.9284 | 0.9112 | 0.9240 | 0.9524 | 0.9352 |
| Method | CrackTree200 | CFD | ||||
|---|---|---|---|---|---|---|
| Precision | Recall | F1 | Precision | Recall | F1 | |
| Canny | 0.30 | 0.21 | 0.25 | 0.4377 | 0.7307 | 0.4570 |
| CrackForest | 0.7656 | 0.9133 | 0.8330 | 0.7466 | 0.9514 | 0.8318 |
| Modified VGG16 | 0.912 | 0.891 | 0.901 | 0.889 | 0.903 | 0.896 |
| U-Net | 0.848 | 0.851 | 0.849 | 0.855 | 0.882 | 0.868 |
| Structured Prediction | - | - | - | 0.9119 | 0.9481 | 0.9244 |
| Ensemble Network | 0.8525 | 0.9091 | 0.8799 | 0.9552 | 0.9521 | 0.9533 |
| Parallel ResNet | 0.9427 | 0.9252 | 0.9308 | 0.9621 | 0.9512 | 0.9563 |
| CrackTree200 Testing | CFD Testing | |
|---|---|---|
| CrackTree200 (Training) | Pr = 0.9427 | Pr = 0.9792 |
| Re = 0.9252 | Re = 0.8992 | |
| F1 = 0.9308 | F1 = 0.9346 | |
| CFD (Training) | Pr = 0.4658 | Pr = 0.9237 |
| Re = 0.6975 | Re = 0.9723 | |
| F1 = 0.5139 | F1 = 0.9465 | |
| Hybrid dataset (Training) | Pr = 0.9335 | Pr = 0.9288 |
| Re = 0.9006 | Re = 0.9483 | |
| F1 = 0.9131 | F1 = 0.9369 |
| Original Image (CrackTree200) |  |  |  |  |  | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| Morphological Features | Truth | Predicted | Truth | Predicted | Truth | Predicted | Truth | Predicted | Truth | Predicted |
| Length | 1474 | 1265 | 1468 | 1045 | 4383 | 4241 | 2000 | 1810 | 3063 | 2600 |
| Max Width | 8.0 | 5.7 | 8.2 | 6.3 | 14 | 5.66 | 7.2 | 8.0 | 10.8 | 5.7 |
| Mean Width | 4.5 | 3.7 | 4.5 | 3.8 | 4.8 | 3.7 | 4.6 | 4.0 | 4.8 | 3.7 |
| Area | 6612 | 4490 | 6930 | 3917 | 22,334 | 15,568 | 9372 | 7310 | 15,127 | 9197 |
| Original Image (CFD) |  |  |  |  |  | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| Morphological Features | Truth | Predicted | Truth | Predicted | Truth | Predicted | Truth | Predicted | Truth | Predicted |
| Length | 3330 | 2833 | 540 | 539 | 697 | 689 | 523 | 535 | 451 | 455 |
| Max Width | 14.6 | 11.7 | 7.2 | 8.9 | 14.4 | 14.6 | 14.6 | 12.4 | 7.2 | 10 |
| Mean Width | 4.7 | 5.7 | 4.4 | 6.1 | 6.6 | 7.3 | 8.2 | 9.6 | 4.5 | 5.7 |
| Area | 15383 | 16,237 | 2403 | 3527 | 4894 | 5420 | 4325 | 5056 | 2068 | 2656 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fan, Z.; Lin, H.; Li, C.; Su, J.; Bruno, S.; Loprencipe, G. Use of Parallel ResNet for High-Performance Pavement Crack Detection and Measurement. Sustainability 2022, 14, 1825. https://doi.org/10.3390/su14031825
Fan Z, Lin H, Li C, Su J, Bruno S, Loprencipe G. Use of Parallel ResNet for High-Performance Pavement Crack Detection and Measurement. Sustainability. 2022; 14(3):1825. https://doi.org/10.3390/su14031825
Chicago/Turabian StyleFan, Zhun, Huibiao Lin, Chong Li, Jian Su, Salvatore Bruno, and Giuseppe Loprencipe. 2022. "Use of Parallel ResNet for High-Performance Pavement Crack Detection and Measurement" Sustainability 14, no. 3: 1825. https://doi.org/10.3390/su14031825
APA StyleFan, Z., Lin, H., Li, C., Su, J., Bruno, S., & Loprencipe, G. (2022). Use of Parallel ResNet for High-Performance Pavement Crack Detection and Measurement. Sustainability, 14(3), 1825. https://doi.org/10.3390/su14031825