


Car-Following Model Optimization and Simulation Based on Cooperative Adaptive Cruise Control


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Literature Review
2.1. Car-Following Study on the Theoretical Derivation
2.2. Car-Following Study on the Data-Driven Methodology
3. Methods and Methodology
3.1. CACC Model Description
3.2. CACC Model Improvement
- (1)
- In a free flow state, the expected headway tends to be unconstrained, with a significantly large value.
- (1)
- In a congested flow state, the expected headway is approximately the sum of the vehicle length and safety distance, i.e., + .
- (3)
- In a normal traffic flow state, the expected headway should be an increasing function of the vehicle speed.
3.3. Numerical Simulation Environment Construction
4. Model Analysis and Simulation
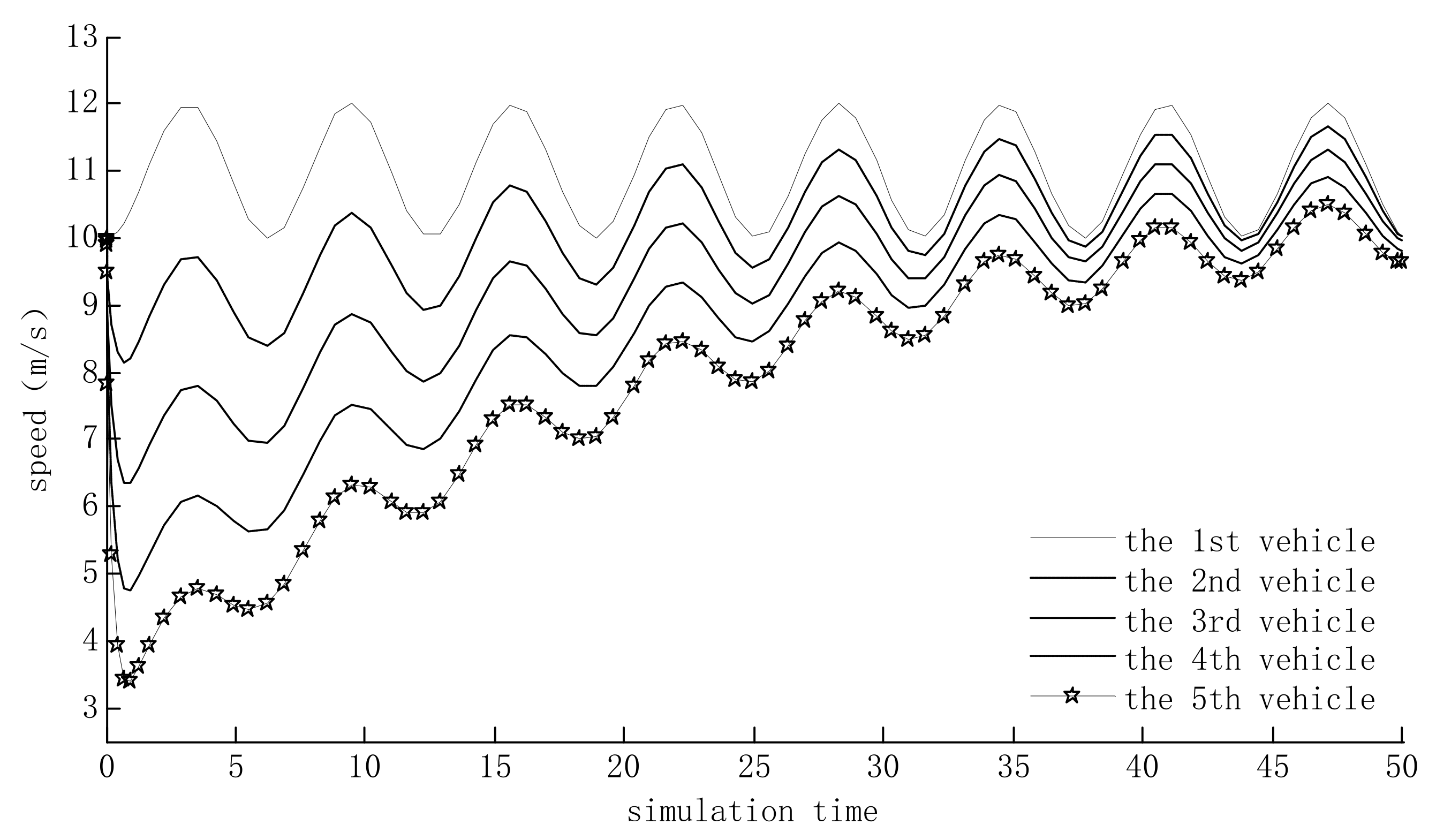
4.1. Speed Variation of the Vehicle Platoon Using the Original CACC Model
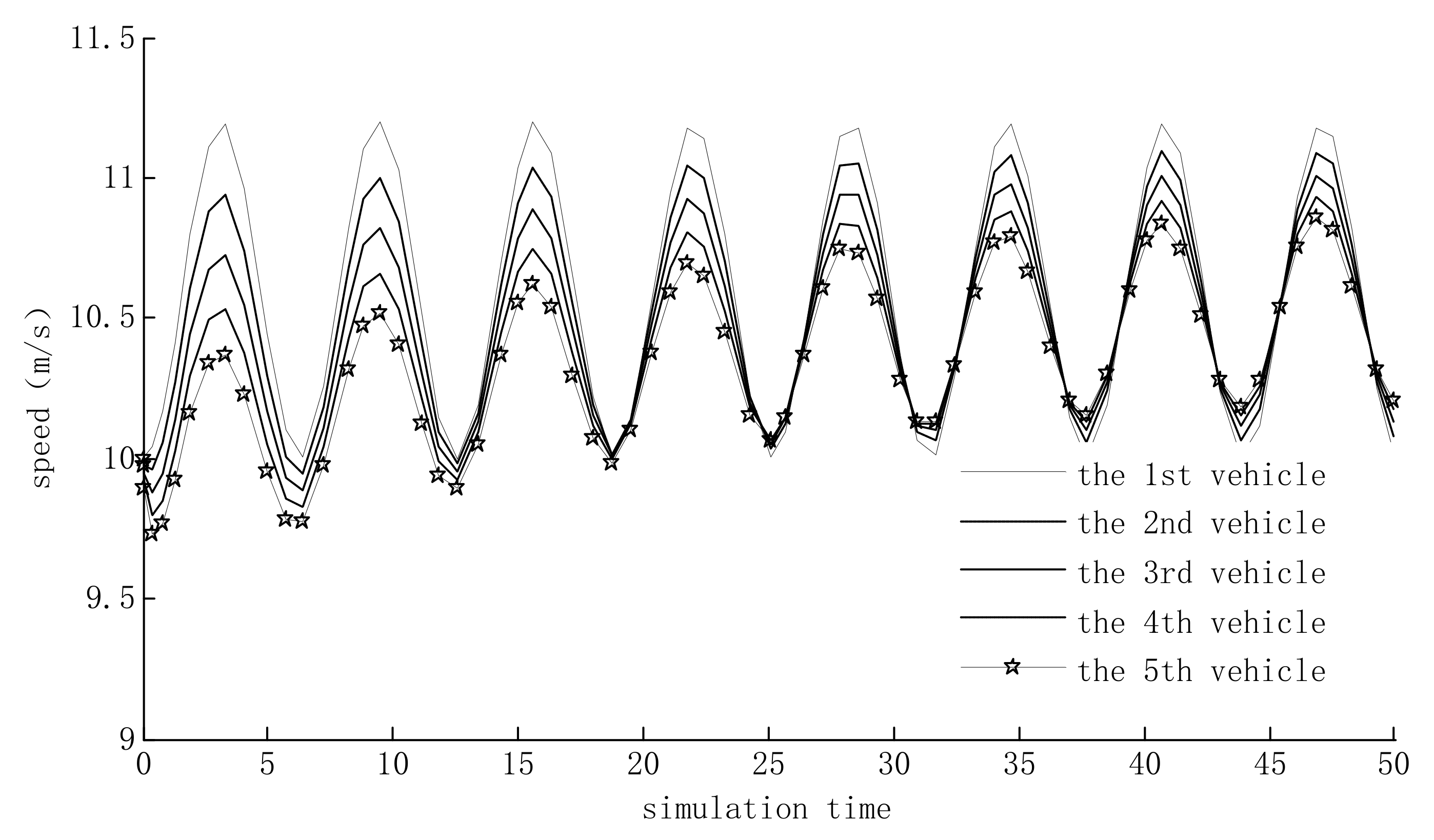
4.2. Speed Variation of the Vehicle Platoon, Using the Improved CACC Model
4.3. Speed Variation Comparison, before and after the Model Improvement
5. Characterization of the Improved CACC Model
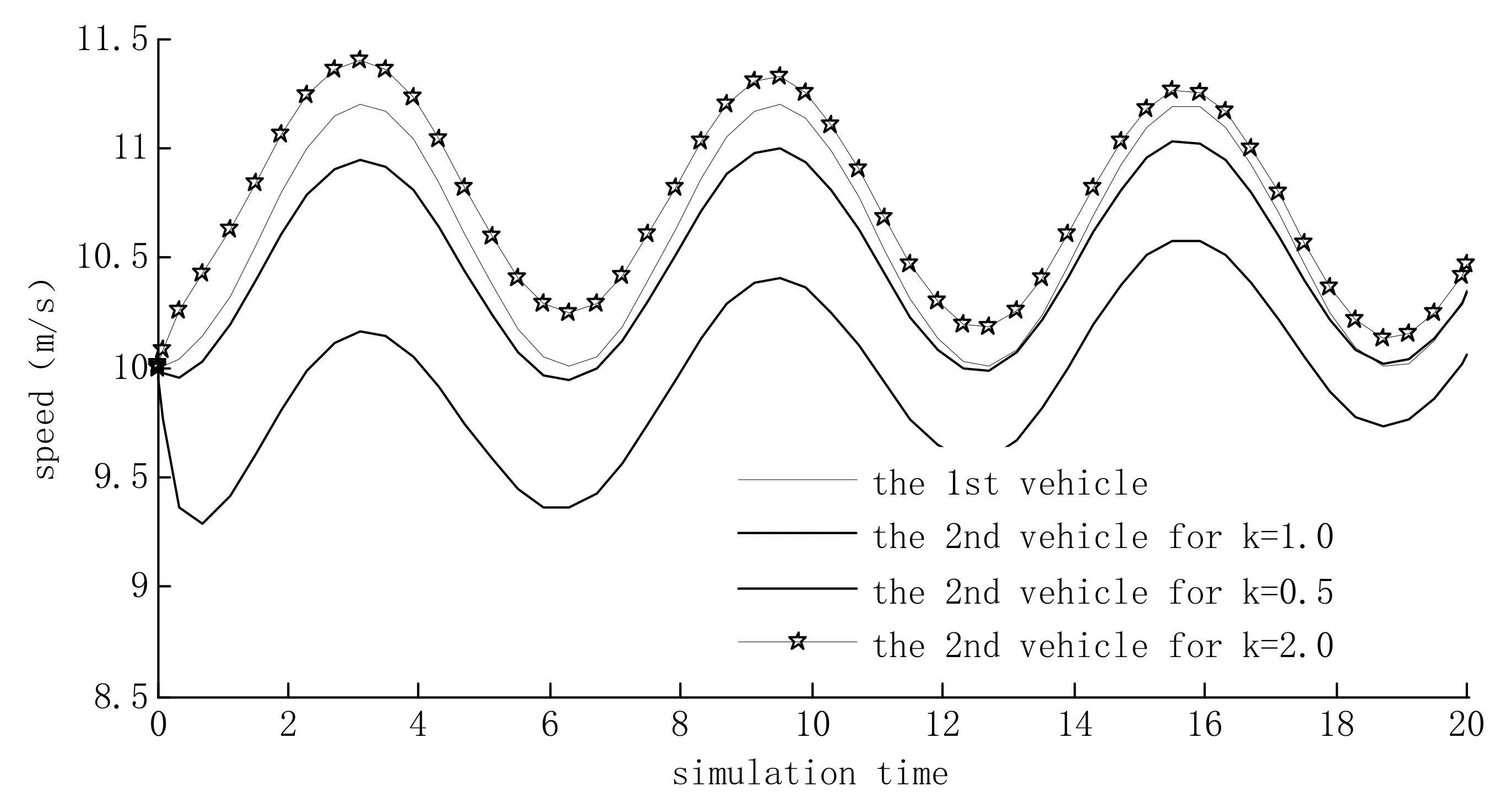
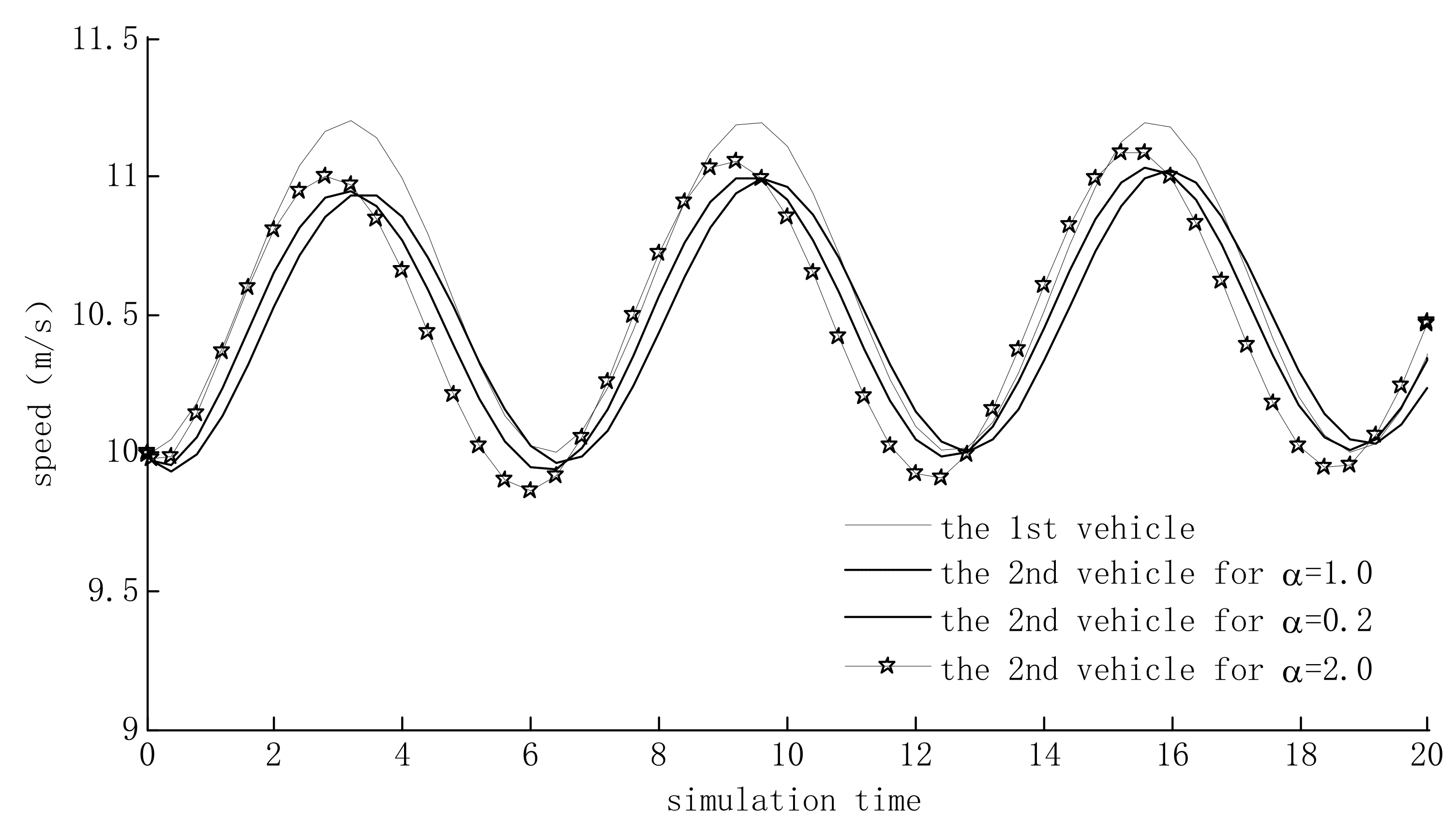
5.1. Analysis of the Following Characteristics at Different
5.2. Analysis of the Following Characteristics at Different
5.3. Analysis of the Following Characteristics at Different
5.4. Analysis of the Following Characteristics at Different
6. Conclusions
- (1)
- Based on the dynamic time headway, the classical CACC car-following model was improved. The simulation analysis verified that the improved following model showed a greater car-following effectiveness.
- (2)
- In the improved CACC model, the disturbance condition of the first car is proposed, and the operation state in the car-following queue is observed. The simulation results show that the space headway in a stable state is negatively related to the speed difference between the front and rear vehicles. The space headway of the queue is positively correlated with the extreme speed; The anti-interference capability of the car-following queue is positively related to the information coordination ability.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wu, L.N.; Ci, Y.S.; Wang, Y.P.; Chen, P. Fuel Consumption in the Oversaturated Signalized Intersection Considering Queue Effects: A Case Study in Harbin, China. Energy 2020, 192, 1–9. [Google Scholar] [CrossRef]
- Wu, L.N.; Ci, Y.S.; Sun, Y.C.; Qi, W. Research on Joint Control of On-ramp Metering and Mainline Speed Guidance in the Urban Expressway based on MPC and Connected Vehicles. J. Adv. Transp. 2020, 2020, 1–8. [Google Scholar] [CrossRef]
- Wang, X.N.; Liu, M.Z.; Ci, Y.S.; Wu, L.N. Effect of front two adjacent vehicles’ velocity information on car-following model construction and stability analysis. Phys. A Stat. Mech. Its Appl. 2022, 607, 128196. [Google Scholar] [CrossRef]
- Gibbins, J. GOV: Funding BIZ: Aftermarket: US Department of Transportation announces USD2.2bn in grant funding in support of transit system operations. Truck. Bus Build. Int. Newsl. Commer. Veh. Manuf. Dev. 2021, 9, 43. [Google Scholar]
- Tao, L.; Wang, P.S.; Gao, Y.; Wang, Y. Research on the big data of traditional taxi and online car-hailing: A systematic review. J. Transp. Eng. Engl. Ed. 2021, 8, 1–34. [Google Scholar]
- Takahashi, K. Japan to develop modular hybrid electric vehicle for its Ground Self-Defense Force. Jane S Def. Wkly. IHS Jane S Def. Wkly. 2021, 22, 58. [Google Scholar]
- Hu, J.; Luo, S. A Car-Following Driver Model Capable of Retaining Naturalistic Driving Styles. J. Adv. Transp. 2020, 2020, 1–16. [Google Scholar] [CrossRef]
- Ci, Y.S.; Wu, L.N.; Zhao, J.F.; Sun, Y.C.; Zhang, G.H. V2I-based Car-Following Modeling and Simulation on the Signalized Intersection. Phys. A Stat. Mech. Its Appl. 2019, 525, 672–679. [Google Scholar] [CrossRef]
- Ci, Y.S.; Wu, H.L.; Sun, Y.C.; Wu, L.N. A Prediction Model with Wavelet Neural Network Optimized by the Chicken Swarm Optimization for On-ramps Metering of the Urban Expressway. J. Intell. Transp. Syst. 2022, 26, 356–365. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, Z.; Liu, F.; Lu, G. Investigating heterogeneous car-following behaviors of different vehicle types, traffic densities and road types. Transp. Res. Interdiscip. Perspect. 2021, 9, 100315. [Google Scholar] [CrossRef]
- Peng, G.H.; Sun, P.H. A dynamical model of consideration of the multiple information car-following with the consideration of the multiple information of preceding cars. Phys. Lett. A 2010, 374, 1694–1698. [Google Scholar] [CrossRef]
- Zhang, L.; Zhang, S.; Zhou, B.; Jiao, S.; Huang, Y. An Improved Car-Following Model considering Desired Safety Distance and Heterogeneity of Driver’s Sensitivity. J. Adv. Transp. 2021, 2021, 1–12. [Google Scholar] [CrossRef]
- Tang, L.; Sun, L.H.; Peng, G.H. Traffic flow following model and numerical simulation based on multi-vehicle information. J. Syst. Simul. 2012, 24, 293–296. [Google Scholar]
- Zhang, L.; Wang, Y.; Zhu, H. Theory and Experiment of Cooperative Control at Multi-Intersections in Intelligent Connected Vehicle Environment: Review and Perspectives. Sustainability 2022, 14, 1542. [Google Scholar] [CrossRef]
- He, Z.C.; Sun, W.B. Car-following model considering lateral separation and overtaking expectations. Acta Phys. Sin. 2013, 62, 108901. [Google Scholar]
- Sun, J.; Zheng, Z.; Sun, J. Stability analysis methods and their applicability to car-following models in conventional and connected environments. Transp. Res. Part B Methodol. 2018, 109, 212–237. [Google Scholar] [CrossRef]
- Gu, H.; Zhang, J.; Jin, P.J.; Ran, B. Stability analysis of lead-vehicle control model in cooperative adaptive cruise control platoon within heterogeneous traffic flow. J. Southeast Univ. 2018, 34, 386–393. [Google Scholar]
- Qin, Y.; Li, S. String Stability Analysis of Mixed CACC Vehicular Flow With Vehicle-to-Vehicle Communication. IEEE Access 2020, 8, 174132–174141. [Google Scholar] [CrossRef]
- Qin, Y.Y.; Wang, H.; Ran, B. CACC vehicle following model and mixed traffic flow analysis. Transp. Syst. Eng. Inf. 2018, 18, 64–69. [Google Scholar]
- Milanes, V.; Shladover, S.E. Modeling cooperative and autonomous adaptive cruise control dynamic responses using experimental data. Transp. Res. Part C Emerg. Technol. 2014, 48, 285–300. [Google Scholar] [CrossRef]
- Yang, L.H.; Zhang, C.; Qiu, X.Y.; WANG, H. Research progress on car-following models. J. Traffic Transp. Eng. 2019, 19, 125–138. [Google Scholar]
- Zhou, Y.; Medina, J.C.; Taylor, J.; Liu, X.C. Empirical Verification of Car-Following Parameters Using Naturalistic Driving Data on Freeway Segments. J. Transp. Eng. Part A. Syst. 2022, 2, 148. [Google Scholar] [CrossRef]
- Li, C.; Chen, X.; Zhang, L. A global optimization algorithm for trajectory data based car-following model calibration. Transp. Res. Part C 2016, 68, 311–332. [Google Scholar] [CrossRef]
- Luo, Y.; Qin, W.H.; Zhai, J.F. Research on Low-Speed Car-Following Policy Decision Based on Improved DDPG Algorithm. Meas. Control. Technol. 2019, 38, 1–23. [Google Scholar]
- Lou, B.; Yufang, L.; Xiaoding, L.; Xu, Z. Car-following behavior modeling driven by small data sets based on mnemonic extreme gradient boosting framework. Chin. Sci. 2022, 65, 267–268. [Google Scholar] [CrossRef]
- Guo, Y.; Yuping, L.U.; Zhang, Y.; Wang, C. Optimization of BP neural network based model for car-following. China Saf. Sci. J. 2016, 26, 103–108. [Google Scholar]
- Jiang, H.T.; Chang, L.; Lou, Y.Q.; Li, Q.; Chen, D.P. Research on Car-following Model Based on Grey Neural Network. Microelectron. Comput. 2018, 35, 122–127+132. [Google Scholar]
- Ma, M.; Xiao, J.; Liang, S.; Hou, J. An extended car-following model accounting for average optimal velocity difference and backward-looking effect based on the Internet of Vehicles environment. Mod. Phys. Lett. B 2022, 36, 2150562. [Google Scholar] [CrossRef]
- Papathanasopoulou, V.; Antoniou, C. Towards data-driven car-following models. Transp. Res. Part C Emerg. Technol. 2015, 55, 496–509. [Google Scholar] [CrossRef]
- He, Z.B.; Zheng, L.; Guan, W. A simple nonparametric car-following model driven by field data. Transp. Res. Part B Methodol. 2015, 80, 185–201. [Google Scholar] [CrossRef]
- Wei, D.L.; Liu, H.C. Analysis of asymmetric driving behavior using a self-learning approach. Transp. Res. Part B Methodol. 2013, 47, 1–14. [Google Scholar] [CrossRef]
- Zhu, M.X.; Wang, X.S.; Wang, Y.H. Human-like autonomous car-following model with deep reinforcement learning. Transp. Res. Part C 2018, 97, 348–368. [Google Scholar] [CrossRef]
- Jiang, N.; Yu, B.; Cao, F.; Dang, P.; Cui, S. An extended visual angle car-following model considering the vehicle types in the adjacent lane. Phys. A Stat. Mech. Its Appl. 2021, 566, 125665. [Google Scholar] [CrossRef]
- Wang, X.N.; Liu, M.Z.; Ci, Y.S.; Yang, Y.X. Effectiveness of driver’s bounded rationality and speed guidance on fuel-saving and emissions-reducing at a signalized intersection. J. Clean. Prod. 2021, 325, 129343. [Google Scholar] [CrossRef]







Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, C.-J.; Jia, H.-F. Car-Following Model Optimization and Simulation Based on Cooperative Adaptive Cruise Control. Sustainability 2022, 14, 14067. https://doi.org/10.3390/su142114067
Song C-J, Jia H-F. Car-Following Model Optimization and Simulation Based on Cooperative Adaptive Cruise Control. Sustainability. 2022; 14(21):14067. https://doi.org/10.3390/su142114067
Chicago/Turabian StyleSong, Cheng-Ju, and Hong-Fei Jia. 2022. "Car-Following Model Optimization and Simulation Based on Cooperative Adaptive Cruise Control" Sustainability 14, no. 21: 14067. https://doi.org/10.3390/su142114067
APA StyleSong, C.-J., & Jia, H.-F. (2022). Car-Following Model Optimization and Simulation Based on Cooperative Adaptive Cruise Control. Sustainability, 14(21), 14067. https://doi.org/10.3390/su142114067