
Is Only the Dedicated Lane for Automated Vehicles Essential in the Future? The Dedicated Lanes Optimal Operating System Evaluation

Abstract
:1. Introduction
- 1.
- An analysis is made of AVs positive–negative effects based on AVs MPR considering the interaction between vehicles.
- 2.
- Given MPR on the derived negative effect, a simulation of DLs for AVs using the existing infra is conducted.
- 3.
- A proposal of the optimal DLs operation strategy for AVs is detailed.
- 1.
- When AVs drive in a mixed traffic situation, we contemplate the causes of negative and positive effects.
- 2.
- We build a DL to mitigate negative situations.
- 3.
- We not only check the basic effects of DLs but also extract feasible and optimal operating strategy of DLs by utilizing the existing infrastructure.
2. Methodology
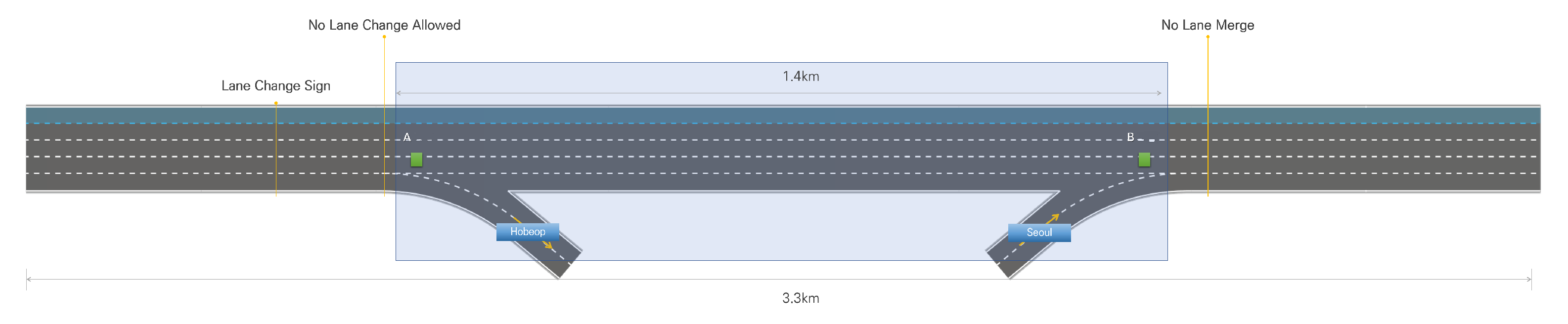
2.1. Spatial Scope and Data Collection
2.2. Simulation Network Environment and AVs Settings
2.3. Simulation Scenarios Design and Evaluation Indicators
2.3.1. Simulation of AVs Introduction Effects in Mixed Traffic Simulation
2.3.2. Simulation of Optimal DLs Operation Plan for AVs
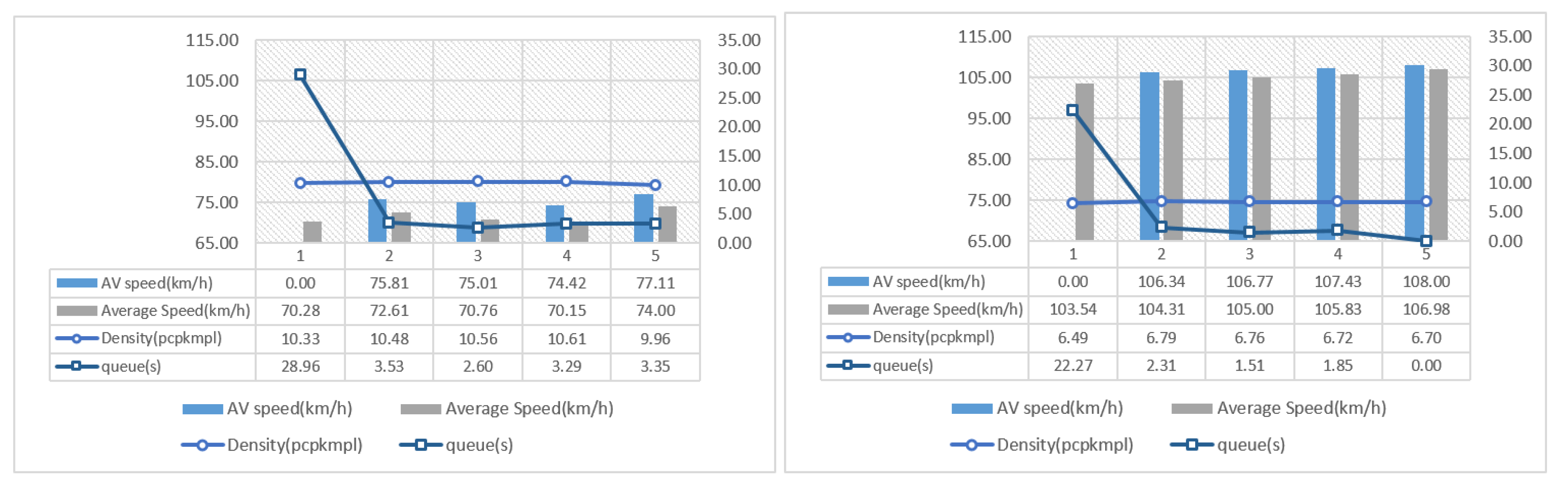
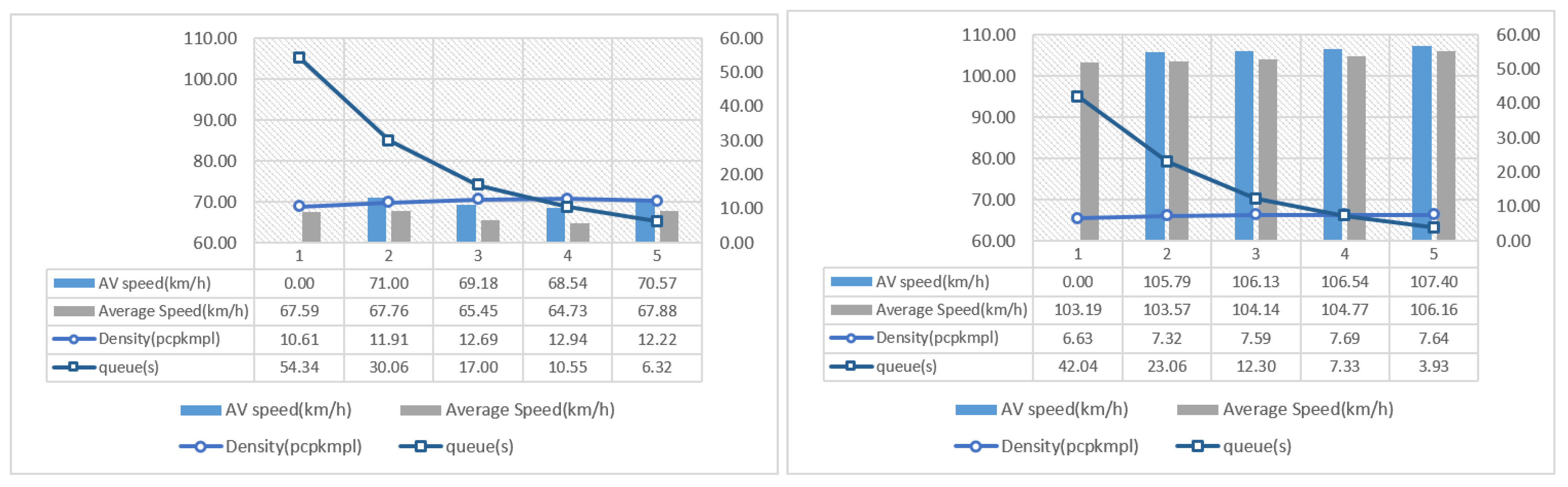
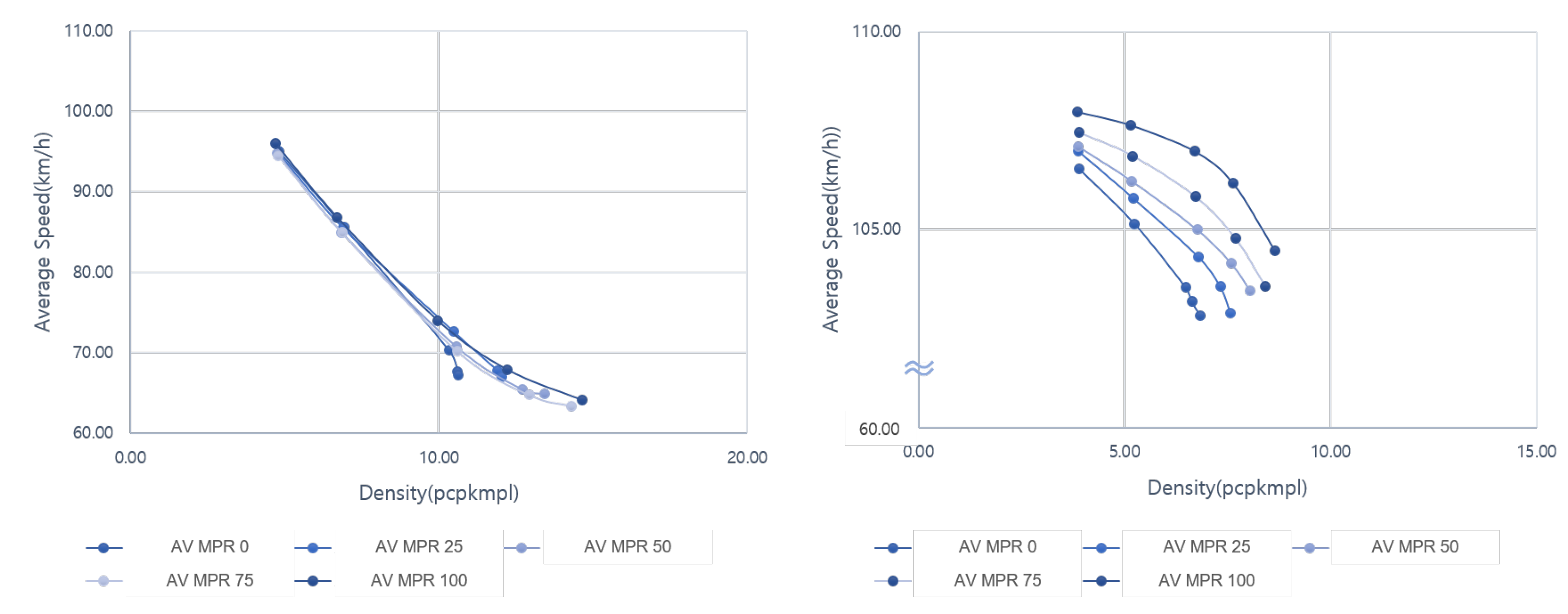
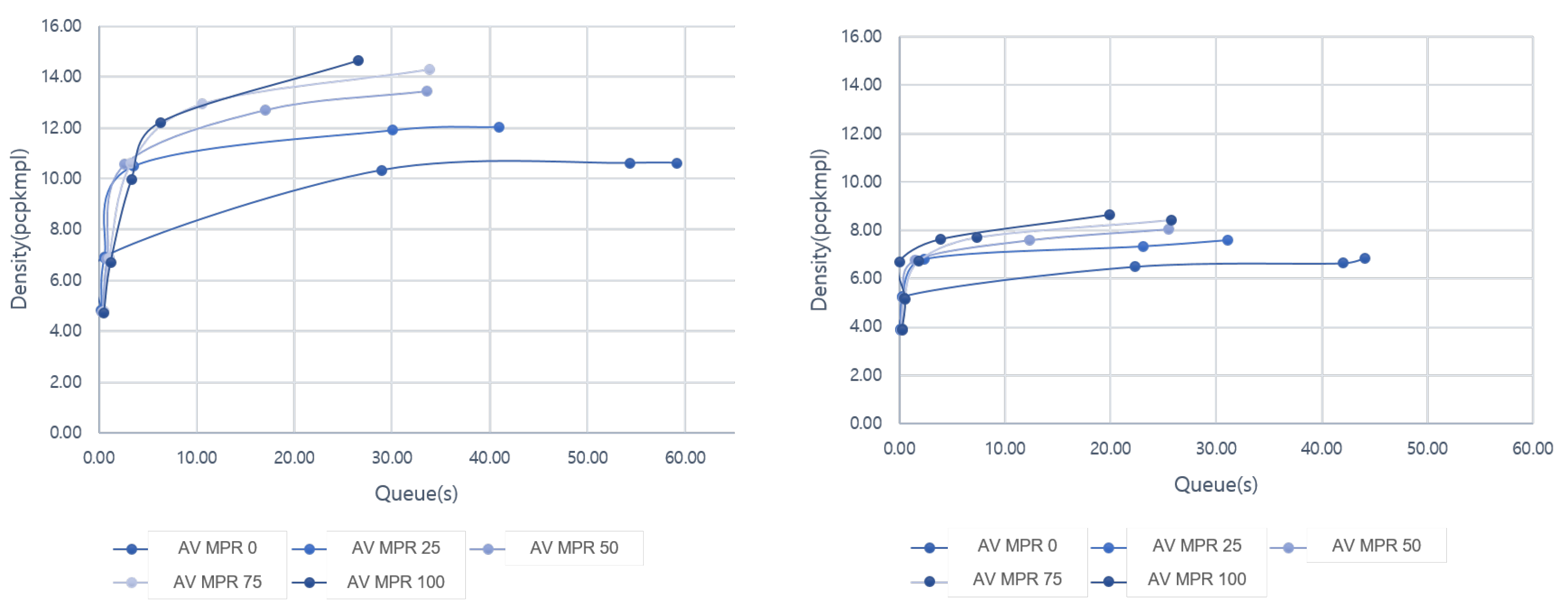
3. Analysis Result on Scenarios of AVs Introduction Effects (Simulation 1)
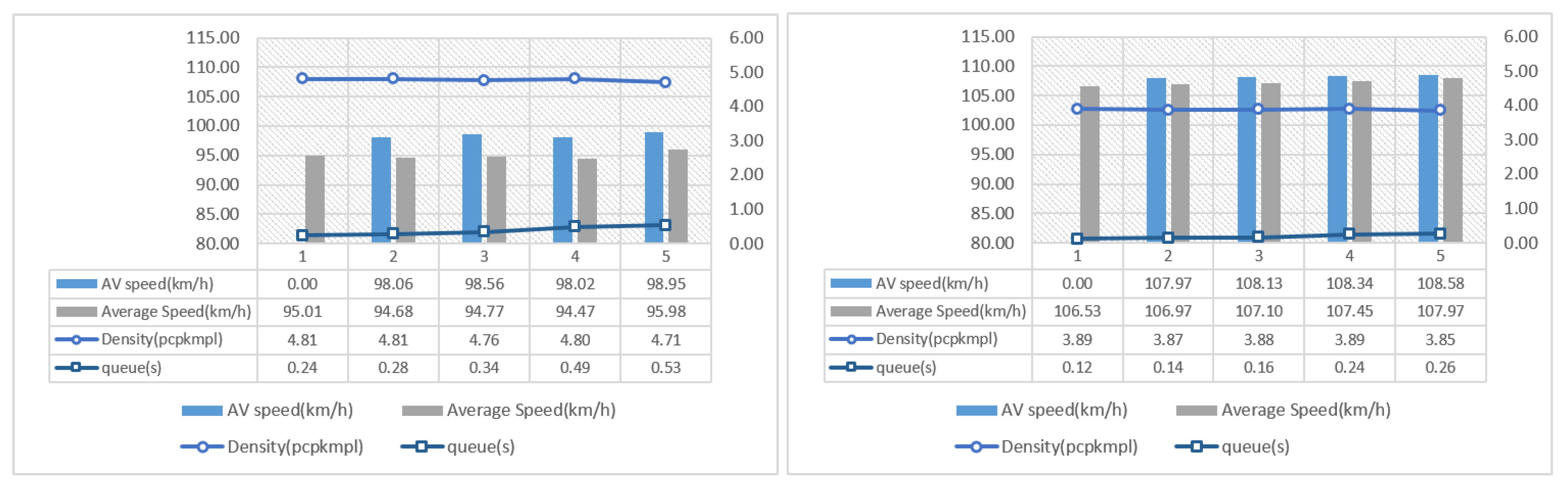
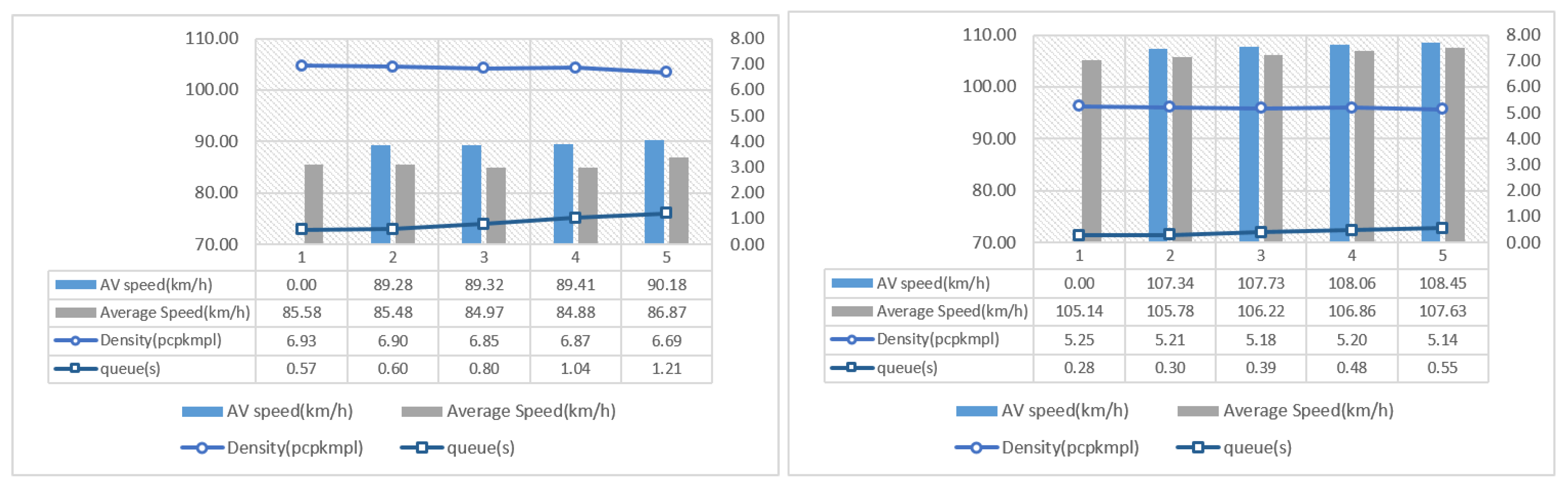
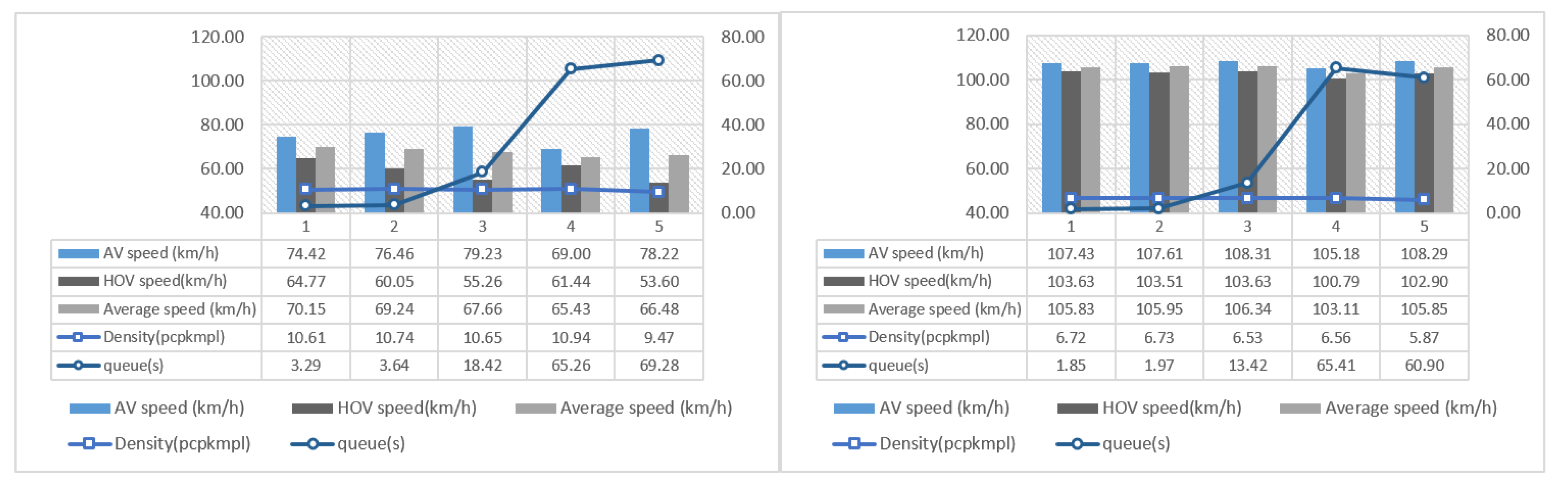
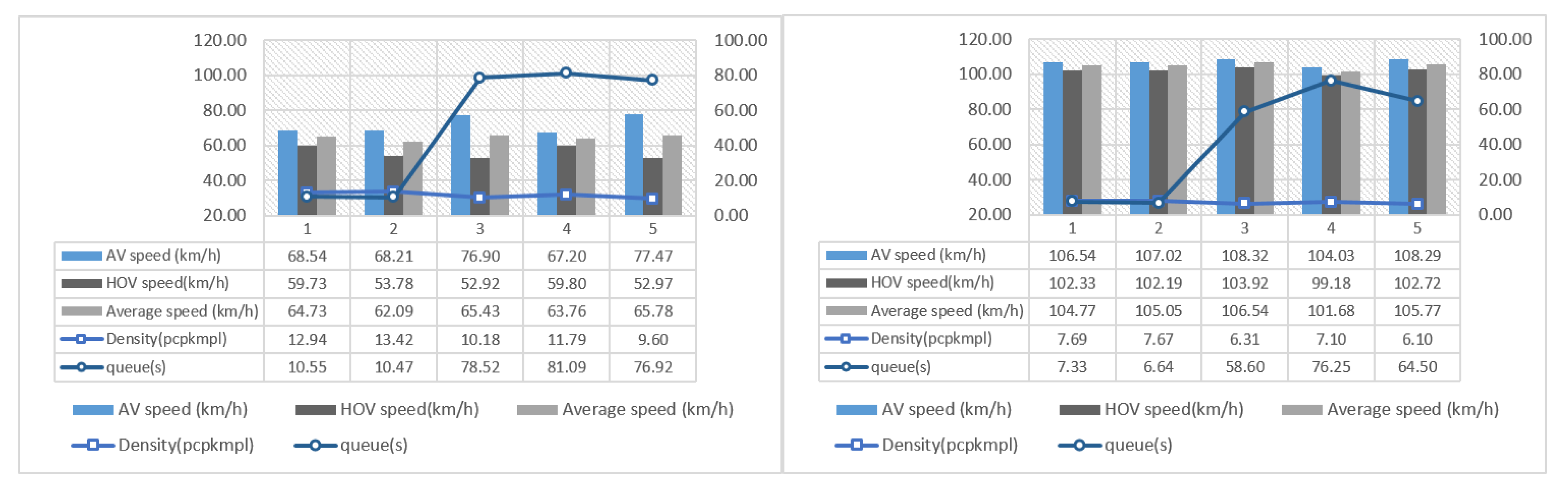
3.1. Result of Simulation 1 Scenarios
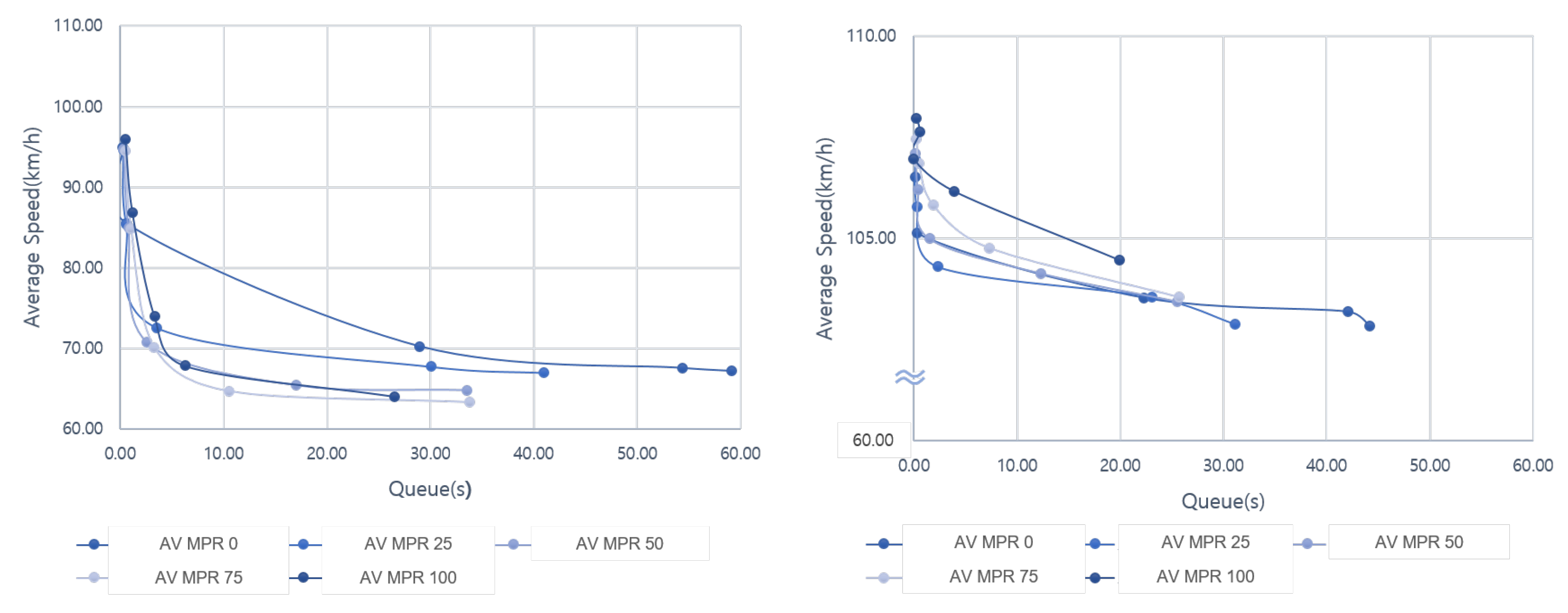
3.2. Comparative Analysis among Simulation 1 Scenario Indicators
4. Analysis Result on Scenarios of DLs Introduction Effects (Simulation 2)
5. Measures to Establish an Operation Strategy for DLs for AVs
5.1. Judgment Methodology for Establishment of Operational Strategy for AVs Based Proposed New Indicator
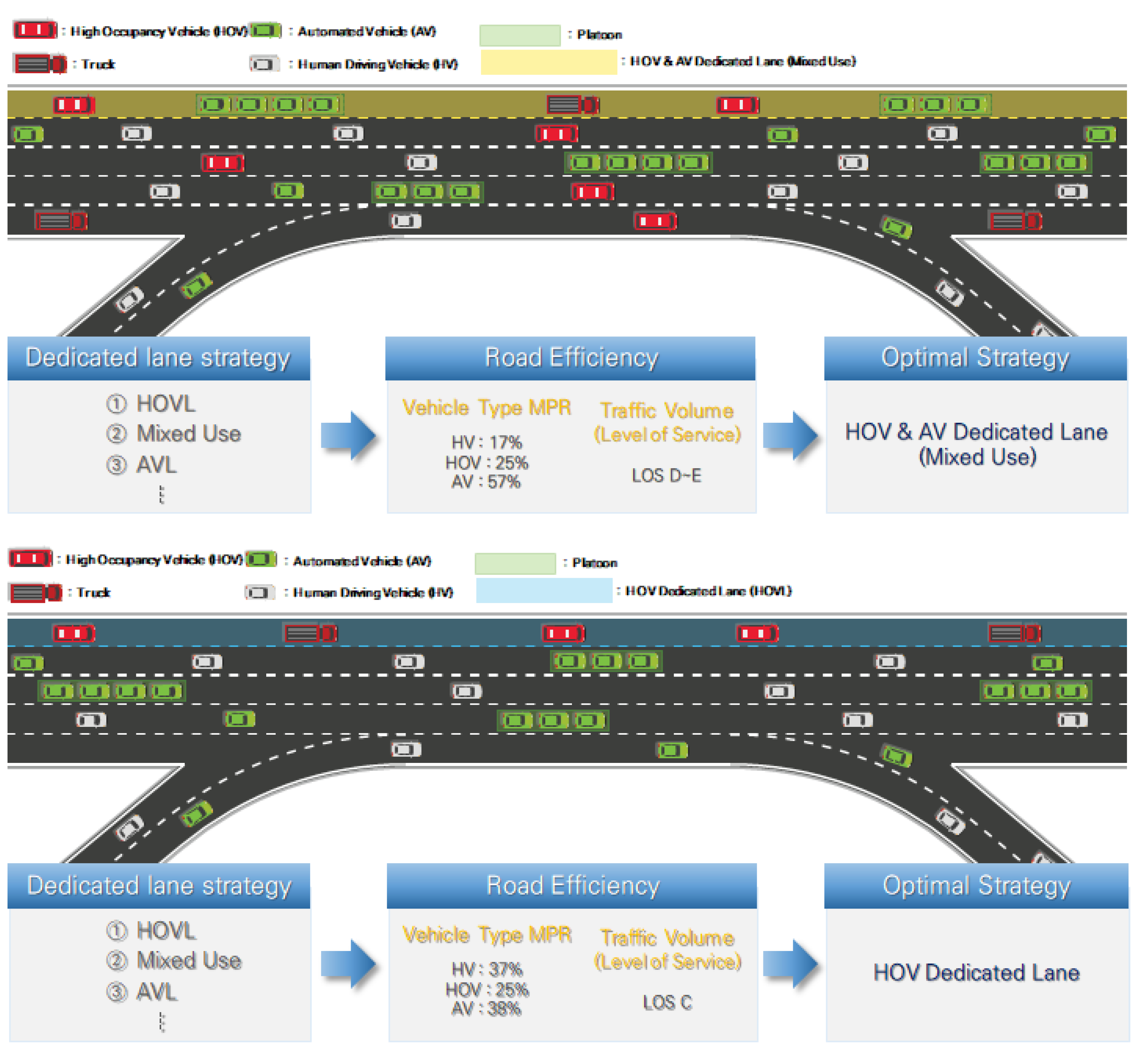
5.2. Examples of Optimal DLs Operation Strategies for AVs
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- J3016_202104; Taxonomy and Definitions for Terms Related to Driving Au-tomation Systems For On-Road Motor Vehicles. SAE International: Warrendale, PA, USA, 2021.
- Lee, K.; Jeon, S.; Kim, H.; Kum, D. Optimal path tracking control of autonomous vehicle: Adaptive full-state linear quadratic Gaussian (LQG) control. IEEE Access 2019, 7, 109120–109133. [Google Scholar] [CrossRef]
- Singh, S. Critical Reasons for Crashes Investigated in the National Motor Vehicle Crash Causation Survey (No. DOT HS 812 115); US Department of Transportation: Washington, DC, USA, 2015. [Google Scholar]
- Wagner, P. Traffic control and traffic management in a transportation system with autonomous vehicles. In Autonomous Driving; Springer: Berlin/Heidelberg, Germany, 2016; pp. 301–316. [Google Scholar]
- Liu, H.; Kan, X.D.; Shladover, S.E.; Lu, X.Y.; Ferlis, R.E. Modeling impacts of co-operative adaptive cruise control on mixed traffic flow in multi-lane freeway facilities. Transport. Res. Part C Emerg. Technol. 2018, 95, 261–279. [Google Scholar] [CrossRef]
- Khattak, Z.H.; Smith, B.L.; Park, H.; Fontaine, M.D. Cooperative lane control appli-cation for fully connected and automated vehicles at multilane freeways. Transp. Res. Part C Emerg. Technol. 2020, 111, 294–317. [Google Scholar] [CrossRef]
- Kang, M.H.; Lm, I.J.; Song, J.I.; Hwang, K.Y. Analyzing Traffic Impacts of Auto-mated Vehicles on Expressway Weaving Sections. J. Transp. Res. 2019, 26, 33–47. [Google Scholar]
- Kang, M.; Song, J.; Hwang, K. The Extraction of Automated Vehicles Traffic Accident Factors and Scenarios Using Real-World Data. In Congress on Intelligent Systems; Springer: Singapore, 2022; pp. 1–15. [Google Scholar]
- Kang, M.; Song, J.; Hwang, K. For Preventative Automated Driving System (PADS): Traffic Accident Context Analysis Based on Deep Neural Networks. Electronics 2020, 9, 1829. [Google Scholar] [CrossRef]
- Kang, M.; Lee, W.; Hwang, K.; Yoon, Y. Vision Transformer for Detecting Critical Situations and Extracting Functional Scenario for Automated Vehicle Safety Assessment. Sustainability 2022, 14, 9680. [Google Scholar] [CrossRef]
- Ye, L.; Yamamoto, T. Modeling connected and autonomous vehicles in heteroge-neous traffic flow. Phys. A Stat. Mech. Its Appl. 2018, 490, 269–277. [Google Scholar] [CrossRef]
- Amirgholy, M.; Shahabi, M.; Oliver Gao, H. Traffic automation and lane manage-ment for communicant, autonomous, and human-driven vehicles. Transport. Res. Part C Emerg. Technol. 2020, 111, 477–495. [Google Scholar] [CrossRef]
- Lee, S.Y.; Oh, C. Lane Change Behavior of Manual Vehicles in Automated Vehicle Platooning Environments. J. Korean Soc. Transp. 2017, 35, 332–347. [Google Scholar] [CrossRef]
- Lee, S.; Jeong, E.; Oh, M.; Oh, C. Driving aggressiveness management policy to enhance the performance of mixed traffic conditions in automated driving environments. Transp. Res. Part A Policy Pract. 2019, 121, 136–146. [Google Scholar] [CrossRef]
- Litman, T. Autonomous Vehicle Implementation Predictions; Victoria Transport Policy Institute: Victoria, BC, Canada, 2017; p. 28. [Google Scholar]
- Lumiaho, A.; Malin, F.; Road Transport Automation: Road Map and Action Plan 2016–2020. Liikenneviraston tutkimuksia ja selvityksiä. 2016. Available online: https://urn.fi/URN:ISBN:978-952-317-263-0 (accessed on 6 July 2022).
- McDonald, S.S.; Rodier, C. Envisioning automated vehicles within the built envi-ronment: 2020, 2035, and 2050. In Road Vehicle Automation 2; Springer: Cham, Switzerland, 2015; pp. 225–233. [Google Scholar]
- Lee, S.; Oh, C.; Hong, S. Exploring lane change safety issues for manually driven vehicles in vehicle platooning environments. IET Intell. Transp. Syst. 2018, 12, 1142–1147. [Google Scholar] [CrossRef]
- Kockelman, K.M.; Avery, P.; Bansal, P.; Boyles, S.D.; Bujanovic, P.; Choudhary, T.; Clements, L.; Domnenko, G.; Fagnant, D.; Helsel, J.; et al. Implications of Connected and Automated Vehicles on the Safety and Operations of Roadway Networks: A Final Report (No. FHWA/TX-16/0-6849-1). 2016. Available online: https://trid.trb.org/view/1428776 (accessed on 6 July 2022).
- Talebpour, A.; Mahmassani, H.S.; Elfar, A. Investigating the effects of reserved lanes for autonomous vehicles on congestion and travel time reliability. Transp. Res. Rec. 2017, 2622, 1–12. [Google Scholar] [CrossRef]
- Papadoulis, A.; Quddus, M.; Imprialou, M. Evaluating the safety impact of con-nected and autonomous vehicles on motorways. Accid. Anal. Prev. 2019, 124, 12–22. [Google Scholar] [CrossRef]
- Machiani, S.G.; Ahmadi, A.; Musial, W.; Katthe, A.; Melendez, B.; Jahangiri, A. Implications of a Narrow Automated Vehicle-Exclusive Lane on Interstate 15 Ex-press Lanes. J. Adv. Transp. 2021, 2021, 6617205. [Google Scholar]
- Li, T.; Guo, F.; Krishnan, R.; Sivakumar, A.; Polak, J. Right-of-way reallocation for mixed flow of autonomous vehicles and human driven vehicles. Transp. Res. Part C Emerg. Technol. 2020, 115, 102630. [Google Scholar] [CrossRef]
- Ma, K.; Wang, H. Influence of exclusive lanes for connected and autonomous ve-hicles on freeway traffic flow. IEEE Access 2019, 7, 50168–50178. [Google Scholar] [CrossRef]
- Rad, S.R.; Farah, H.; Taale, H.; van Arem, B.; Hoogendoorn, S.P. Design and operation of dedicated lanes for connected and automated vehicles on motorways: A concep-tual framework and research agenda. Transp. Res. Part C Emerg. Technol. 2020, 117, 102664. [Google Scholar]
- Korea Expressway Corporation. Available online: https://www.ex.co.kr/ (accessed on 6 July 2022).
- The Korea Transport Institute. Available online: https://www.ktdb.go.kr/ (accessed on 6 July 2022).
- PTV Group. Available online: https://www.ptvgroup.com/en/solutions/products/ptv-vissim/ (accessed on 6 July 2022).
- Ministry of Land, Infrastructure and Transport. Available online: https://www.molit.go.kr/english/ (accessed on 6 July 2022).
- Mohajerpoor, R.; Ramezani, M. Mixed flow of autonomous and human-driven vehicles: Analytical headway modeling and optimal lane management. Transp. Res. Part C Emerg. Technol. 2019, 109, 194–210. [Google Scholar] [CrossRef]
- Xiao, L.; Wang, M.; Van Arem, B. Traffic flow impacts of converting an HOV lane into a dedicated CACC lane on a freeway corridor. IEEE Intell. Transp. Syst. Mag. 2019, 12, 60–73. [Google Scholar] [CrossRef]
- Qom, S.F.; Xiao, Y.; Hadi, M. Evaluation of cooperative adaptive cruise control (CACC) vehicles on managed lanes utilizing macroscopic and mesoscopic simula-tion. In Proceedings of the Transportation Research Board 95th Annual Meeting (No. 16-6384), Washington, DC, USA, 10–14 January 2016. [Google Scholar]
- Ivanchev, J.; Knoll, A.; Zehe, D.; Nair, S.; Eckhoff, D. Potentials and implications of dedicated highway lanes for autonomous vehicles. arXiv 2017, arXiv:1709.07658. [Google Scholar]
- Vander Laan, Z.; Sadabadi, K.F. Operational performance of a congested corridor with lanes dedicated to autonomous vehicle traffic. Int. J. Transp. Sci. Technol. 2017, 6, 42–52. [Google Scholar] [CrossRef]
- Zheng, F.; Liu, C.; Liu, X.; Jabari, S.E.; Lu, L. Analyzing the impact of automat-ed vehicles on uncertainty and stability of the mixed traffic flow. Transp. Res. Part C Emerg. Technol. 2020, 112, 203–219. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Division | Code | Definition | VISSIM Default | Automated Vehicle (SAE Lv.4) |
|---|---|---|---|---|
| Spacing | Stand still distance (CC0) | The desired distance between stopped vehicles | 1.50 m | 0.5 m |
| Headway time (CC1) | Headway (in second) | 0.9 s | 0.6 s | |
| Following Variation (CC2) | The distance in addition to the allowed safety distance that is permissible before the vehicle-drive unit moves closer to the preceding vehicle | 4.00 m | 0 m | |
| Speed | Threshold for entering following (CC3) | Seconds before reaching the safety distance the driver starts to decelerate | −8.00 s | 0 s |
| Negative following threshold (CC4) | The maximum allowable speed difference where following vehicle is faster than preceding vehicle | 0.41 km/h | 0 km/h | |
| Positive following threshold (CC5) | The maximum allowable speed difference where following vehicle is faster than preceding vehicle | 0.41 km/h | 0 km/h | |
| Acceleration | Speed dependency of oscillation (CC6) | Influence of distance on speed oscillation | 11.44 | 0 |
| Oscillation acceleration (CC7) | Influence of vehicle acceleration during car following oscillation | 0.25 m | 0.4 m | |
| Acceleration (CC8) | Desired acceleration when starting from standstill | 3.5 m/s | 3.8 m/s | |
| Other | Acceleration with 80 km/h (CC9) | Desired acceleration at 80 km/h | 1.5 m/s | 1.8 m/s |
| Look ahead distance observed vehicles | Number of vehicles that can see forward on the link | 2 vehicles | 10 vehicles |
| Division | Volume | Speed | Entrance Volume | HVs | HOV | AVs |
|---|---|---|---|---|---|---|
| Scenario 1 | 720 | 103.31 | 240 | |||
| Scenario 2 | 950 | 99.59 | 368 | |||
| Scenario 3 | 1120 | 86.66 | 480 | 73% | 27% | 0∼100% |
| Scenario 4 | 1377 | 72.75 | 624 | (25% units) | ||
| Scenario 5 | 1565 | 60.92 | 742 |
| Division | Description |
|---|---|
| Strategy 1 | Operate only on existing HOVL |
| Strategy 2 | Changed existing HOVL to HOV & AV Lane (Mixed-Use) |
| Strategy 3 | Changed existing only AV Lane |
| Strategy 4 | 1-lane for AVs, 2-lane for HOV (Two dedicated lanes) |
| Strategy 5 | 1-lane for HOV, 2-lane for AVs (Two dedicated lanes) |
| Indicator | Description |
|---|---|
| The average speed | Average vehicle speed in the designated section |
| Density | The vehicle density in the designated section (pcpkmpl, D = V/S) |
| Queue | The vehicle queue in the designated section = delay time (s) |
| LOS | 0 | 25 | 50 | 75 | 100 |
|---|---|---|---|---|---|
| A | - | 2 | 1 | 3 | 1 |
| B | - | 2 | 2 | 3 | 1 |
| C | - | 1 | 3 | 4 | 1 |
| D | - | 1 | 3 | 4 | 0 |
| E | - | 1 | 3 | 4 | 2 |
| Strategy | Description |
|---|---|
| 1 | Operate only on existing HOVL (Basic) |
| 2 | Changed existing HOVL to HOV & AV Lane(Mixed-Use) |
| 3 | Changed existing only AV Lane (AVs only) |
| 4 | 1-lane for AVs, 2-lane for HOV (Two dedicated lanes 1) |
| 5 | 1-lane for HOV, 2-lane for AVs (Two dedicated lanes 2) |
| LOS | Basic | Mixed-Use | AVs Only | Two Dedicated Lane 1 | Two Dedicated Lane 2 |
|---|---|---|---|---|---|
| C | 1 | 0.98 | 0.17 | 0 | 0.01 |
| D | 0.92 | 1 | 0.04 | 0 | 0.05 |
| E | 0.44 | 1 | 0.05 | 0 | 0.13 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kang, M.; Im, I.-j.; Song, J.; Hwang, K. Is Only the Dedicated Lane for Automated Vehicles Essential in the Future? The Dedicated Lanes Optimal Operating System Evaluation. Sustainability 2022, 14, 11490. https://doi.org/10.3390/su141811490
Kang M, Im I-j, Song J, Hwang K. Is Only the Dedicated Lane for Automated Vehicles Essential in the Future? The Dedicated Lanes Optimal Operating System Evaluation. Sustainability. 2022; 14(18):11490. https://doi.org/10.3390/su141811490
Chicago/Turabian StyleKang, Minhee, I-jeong Im, Jaein Song, and Keeyeon Hwang. 2022. "Is Only the Dedicated Lane for Automated Vehicles Essential in the Future? The Dedicated Lanes Optimal Operating System Evaluation" Sustainability 14, no. 18: 11490. https://doi.org/10.3390/su141811490
APA StyleKang, M., Im, I.-j., Song, J., & Hwang, K. (2022). Is Only the Dedicated Lane for Automated Vehicles Essential in the Future? The Dedicated Lanes Optimal Operating System Evaluation. Sustainability, 14(18), 11490. https://doi.org/10.3390/su141811490