
Implications of the Emergence of Autonomous Vehicles and Shared Autonomous Vehicles: A Budapest Perspective



Abstract
:1. Introduction
- What effects do AV and SAV deployments in Budapest have on the following traffic performance parameters (TPP): average and maximum queue lengths, delays, volume, density, utilization (scaled density), velocity, and vehicle kilometers traveled (VKT)? What are the implications of implementing AVs and SAVs concerning consumer surplus (CS)?
- How do varying the share distribution of AVs and SAVs affect traffic performance and CS?
2. Research Methodology
2.1. PTV Visum and EFM Macroscopic Model
2.2. SBA Implementation for AVs
2.2.1. SBA Reaction Time
2.2.2. Parameters of SBA
2.2.3. Parameters of the Model and Calculation of CS
2.3. SAV Modeling by SBA
2.3.1. Conceptual Framework of the Simulation of an SAV System
2.3.2. Supply Modeling of SAV
3. Proposed Future Traffic Scenarios
4. Results and Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Litman, T. Autonomous Vehicle Implementation Predictions: Implications for Transport Planning; Victoria Transport Policy Institute: Victoria, BC, Canada, 2020; p. 45. [Google Scholar]
- Webb, J.; Wilson, C.; Kularatne, T. Will People Accept Shared Autonomous Electric Vehicles? A Survey before and after Receipt of the Costs and Benefits. Econ. Anal. Policy 2019, 61, 118–135. [Google Scholar] [CrossRef]
- Bansal, P.; Kockelman, K.M. Forecasting Americans’ Long-Term Adoption of Connected and Autonomous Vehicle Technologies. Transp. Res. Part A Policy Pract. 2017, 95, 49–63. [Google Scholar] [CrossRef]
- Kockelman, K.; Boyles, S.; Stone, P.; Fagnant, D.; Patel, R.; Levin, M.W.; Guni, S.; Simoni, M.; Albert, M.; Fritz, H.; et al. An Assessment of Autonomous Vehicles: Traffic Impacts and Infrastructure Needs—Final Report; University of Texas at Austin. Center for Transportation Research: Austin, TX, USA, 2017. [Google Scholar] [CrossRef]
- Autovista Group. The State of Autonomous Legislation in Europe. Available online: https://autovistagroup.com/news-and-insights/state-autonomous-legislation-europe (accessed on 20 May 2020).
- Ferrero, F.; Perboli, G.; Rosano, M.; Vesco, A. Car-Sharing Services: An Annotated Review. Sustain. Cities Soc. 2018, 37, 501–518. [Google Scholar] [CrossRef]
- Hall, J.V.; Krueger, A.B. An Analysis of the Labor Market for Uber’s Driver-Partners in the United States. ILR Rev. 2018, 71, 705–732. [Google Scholar] [CrossRef]
- Chen, T.D.; Kockelman, K.M. Carsharing’s Life-Cycle Impacts on Energy Use and Greenhouse Gas Emissions. Transp. Res. Part D Transp. Environ. 2016, 47, 276–284. [Google Scholar] [CrossRef]
- Martin, E.W.; Shaheen, S.A. Greenhouse Gas Emission Impacts of Carsharing in North America. IEEE Trans. Intell. Transp. Syst. 2011, 12, 1074–1086. [Google Scholar] [CrossRef]
- Matalqah, I.; Shatanawi, M.; Alatawneh, A.; Mészáros, F. Impact of Different Penetration Rates of Shared Autonomous Vehicles on Traffic: Case Study of Budapest. Transp. Res. Rec. 2022, 03611981221095526. [Google Scholar] [CrossRef]
- Chen, T.D.; Kockelman, K.M. Management of a Shared Autonomous Electric Vehicle Fleet: Implications of Pricing Schemes. Transp. Res. Rec. 2016, 2572, 37–46. [Google Scholar] [CrossRef]
- Meszaros, F.; Shatanawi, M.; Ogunkunbi, G.A. Challenges of the Electric Vehicle Markets in Emerging Economies. Period. Polytech. Transp. Eng. 2020, 49, 93–101. [Google Scholar] [CrossRef] [Green Version]
- Krueger, R.; Rashidi, T.H.; Rose, J.M. Preferences for Shared Autonomous Vehicles. Transp. Res. Part C Emerg. Technol. 2016, 69, 343–355. [Google Scholar] [CrossRef]
- Fagnant, D.J.; Kockelman, K. Preparing a Nation for Autonomous Vehicles: Opportunities, Barriers and Policy Recommendations. Transp. Res. Part A Policy Pract. 2015, 77, 167–181. [Google Scholar] [CrossRef]
- Simoni, M.D.; Kockelman, K.M.; Gurumurthy, K.M.; Bischoff, J. Congestion Pricing in a World of Self-Driving Vehicles: An Analysis of Different Strategies in Alternative Future Scenarios. Transp. Res. Part C Emerg. Technol. 2019, 98, 167–185. [Google Scholar] [CrossRef]
- Van den Berg, V.A.C.; Verhoef, E.T. Autonomous Cars and Dynamic Bottleneck Congestion: The Effects on Capacity, Value of Time and Preference Heterogeneity. Transp. Res. Part B Methodol. 2016, 94, 43–60. [Google Scholar] [CrossRef]
- Shatanawi, M.; Ghadi, M.; Mészáros, F. Road Pricing Adaptation to Era of Autonomous and Shared Autonomous Vehicles: Perspective of Brazil, Jordan, and Azerbaijan. Transp. Res. Procedia 2021, 55, 291–298. [Google Scholar] [CrossRef]
- Wadud, Z.; MacKenzie, D.; Leiby, P. Help or Hindrance? The Travel, Energy and Carbon Impacts of Highly Automated Vehicles. Transp. Res. Part A Policy Pract. 2016, 86, 1–18. [Google Scholar] [CrossRef]
- Milakis, D.; van Arem, B.; van Wee, B. Policy and Society Related Implications of Automated Driving: A Review of Literature and Directions for Future Research. J. Intell. Transp. Syst. 2017, 21, 324–348. [Google Scholar] [CrossRef]
- Russo, F.; Rindone, C. Regional Transport Plans: From Direction Role Denied to Common Rules Identified. Sustainability 2021, 13, 9052. [Google Scholar] [CrossRef]
- Banister, D. The Sustainable Mobility Paradigm. Transp. Policy 2008, 15, 73–80. [Google Scholar] [CrossRef]
- Rindone, C. Sustainable Mobility as a Service: Supply Analysis and Test Cases. Information 2022, 13, 351. [Google Scholar] [CrossRef]
- ADAC. The Evolution of Mobility; ZukunftsInstitut: Frankfurt am Main, Germany, 2018; p. 45. Available online: https://www.adac.de/-/media/pdf/dko/adac-studie-evolution-der-mobilitaet-englisch.pdf (accessed on 27 July 2022).
- Hungarian Central Statistical Office. Available online: https://www.ksh.hu/?lang=en (accessed on 28 December 2021).
- Department for Transport. TAG UNIT M3.1. Highway Assignment Modelling; Department for Transport: London, UK, 2020; p. 76.
- Főmterv Ltd.; Közlekedés Ltd.; Trenecon Ltd. Egységes Forgalmi Modell; Centre for Budapest Transport: Budapest, Hungary, 2015; p. 71. [Google Scholar]
- PTV Group. PTV Visum Online Manual. Available online: https://cgi.ptvgroup.com/vision-help/VISUM_2021_ENG/Content/TitelCopyright/Index.htm (accessed on 28 December 2021).
- Maciejewski, M.; Bischoff, J. Congestion Effects of Autonomous Taxi Fleets. Transport 2018, 33, 971–980. [Google Scholar] [CrossRef]
- Mahmassani, H.S. Dynamic Network Traffic Assignment and Simulation Methodology for Advanced System Management Applications. Netw. Spat. Econ. 2001, 1, 267–292. [Google Scholar] [CrossRef]
- Ahmed, A. Integration of Real-Time Traffic State Estimation and Dynamic Traffic Assignment with Applications to Advanced Traveller Information Systems. Ph.D. Thesis, University of Leeds, Leeds, UK, 2015. [Google Scholar]
- Matrai, T.; Abel, M.; Kerenyi, L.S. How Can a Transport Model Be Integrated to the Strategic Transport Planning Approach: A Case Study from Budapest. In Proceedings of the 2015 International Conference on Models and Technologies for Intelligent Transportation Systems (MT-ITS), Budapest, Hungary, 3–5 June 2015; pp. 192–199. [Google Scholar]
- Berki, Z. Tackling Sustainable Urban Transport Policy Measures in Transport Models. In Proceedings of the 2015 International Conference on Models and Technologies for Intelligent Transportation Systems (MT-ITS), Budapest, Hungary, 3–5 June 2015; pp. 356–361. [Google Scholar]
- Chiu, Y.; Bottom, J.; Mahut, M.; Paz, A.; Balakrishna, R.; Waller, T.S.; Hicks, J. Dynamic Traffic Assignment: A Primer; Transportation Research Board of the National Academies: Washington, DC, USA, 2011. [Google Scholar]
- Sundaram, S.; Koutsopoulos, H.N.; Ben-Akiva, M.; Antoniou, C.; Balakrishna, R. Simulation-Based Dynamic Traffic Assignment for Short-Term Planning Applications. Simul. Model. Pract. Theory 2011, 19, 450–462. [Google Scholar] [CrossRef]
- Vadali, S.; Kruse, C.J.; Kuhn, K.; Goodchild, A. Guide for Conducting Benefit-Cost Analyses of Multimodal, Multijurisdictional Freight Corridor Investments; Transportation Research Board: Washington, DC, USA, 2017; p. 24680. ISBN 978-0-309-45545-9. [Google Scholar]
- Winkler, C. Transport User Benefits Calculation with the “Rule of a Half” for Travel Demand Models with Constraints. Res. Transp. Econ. 2015, 49, 36–42. [Google Scholar] [CrossRef]
- Weiss, J.; Hledik, R.; Lueken, R.; Lee, T.; Gorman, W. The Electrification Accelerator: Understanding the Implications of Autonomous Vehicles for Electric Utilities. Electr. J. 2017, 30, 50–57. [Google Scholar] [CrossRef]
- Zhang, W.; Guhathakurta, S.; Fang, J.; Zhang, G. Exploring the Impact of Shared Autonomous Vehicles on Urban Parking Demand: An Agent-Based Simulation Approach. Sustain. Cities Soc. 2015, 19, 34–45. [Google Scholar] [CrossRef]
- Maciejewski, M.; Bischoff, J.; Hörl, S.; Nagel, K. Towards a Testbed for Dynamic Vehicle Routing Algorithms. In Proceedings of the Highlights of Practical Applications of Cyber-Physical Multi-Agent Systems; Bajo, J., Vale, Z., Hallenborg, K., Rocha, A.P., Mathieu, P., Pawlewski, P., Del Val, E., Novais, P., Lopes, F., Duque Méndez, N.D., Julián, V., Holmgren, J., Eds.; Springer International Publishing: Cham, Germany, 2017; pp. 69–79. [Google Scholar]
- Menon, N.; Barbour, N.; Zhang, Y.; Pinjari, A.R.; Mannering, F. Shared Autonomous Vehicles and Their Potential Impacts on Household Vehicle Ownership: An Exploratory Empirical Assessment. Int. J. Sustain. Transp. 2019, 13, 111–122. [Google Scholar] [CrossRef]
- Kang, C. No Driver? Bring It On. How Pittsburgh Became Uber’s Testing Ground. The New York Times, 14 September 2016. [Google Scholar]
- Cokyasar, T.; Larson, J. Optimal Assignment for the Single-Household Shared Autonomous Vehicle Problem. Transp. Res. Part B Methodol. 2020, 141, 98–115. [Google Scholar] [CrossRef]
- Shatanawi, M.; Abdelkhalek, F.; Mészáros, F. Urban Congestion Charging Acceptability: An International Comparative Study. Sustainability 2020, 12, 5044. [Google Scholar] [CrossRef]
- Shatanawi, M.; Alatawneh, A.; Mészáros, F. Implications of Static and Dynamic Road Pricing Strategies in the Era of Autonomous and Shared Autonomous Vehicles Using Simulation-Based Dynamic Traffic Assignment: The Case of Budapest. Res. Transp. Econ. 2022, 101231. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category No. | 1 | 2 | 3 | 4 | 5 | 6 |
|---|---|---|---|---|---|---|
| Leading Vehicle | AV | AV | SAV | Other TSys | Other TSys | Other TSys |
| Following Vehicle | AV | SAV | AV | AV | SAV | OtherTSys |
| SBA reaction time factor–PrTSysx-PrTSysy | 0.5 | 0.5 | 0.5 | 0.65 | 0.65 | 1 |
| VKT [km] | Base | Mix-Traffic | AV-Focused | SAV-Focused |
|---|---|---|---|---|
| Total VKT | 17,228,943 | 20,510,993 | 16,923,120 | 10,991,717 |
| Total VKT by SAV | - | 82,673 | 128,518 | 466,572 |
| Occupied VKT | - | 79,629 | 124,094 | 453,275 |
| Unoccupied VKT | - | 3044 | 4424 | 13,297 |
| TPP | Mix-Traffic–Base | AV-Focused–Base | SAV-Focused–Base | |||
|---|---|---|---|---|---|---|
| Z | r | Z | r | Z | r | |
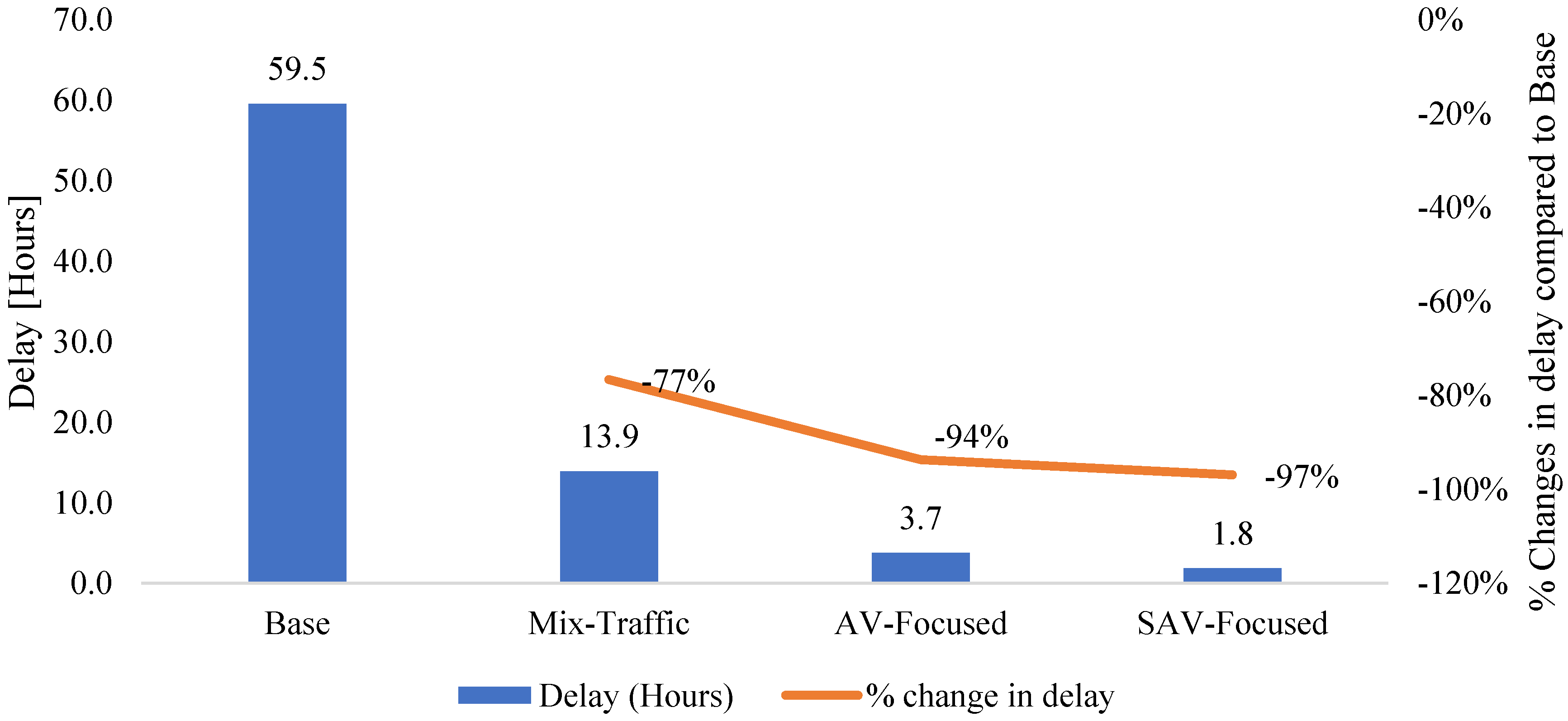
| Delay | −19.940 a | 0.11 | −52.255 a | 0.30 | −60.033 a | 0.34 |
| Average Queue Length | −26.792 a | 0.15 | −48.064 a | 0.28 | −64.769 a | 0.37 |
| Max Queue Length | −26.359 a | 0.15 | −47.633 a | 0.27 | −64.388 a | 0.37 |
| Average Density | −20.623 a | 0.12 | −42.973 a | 0.25 | −98.263 a | 0.56 |
| Volume | −76.876 a | 0.44 | −78.007 a | 0.45 | −112.498 a | 0.65 |
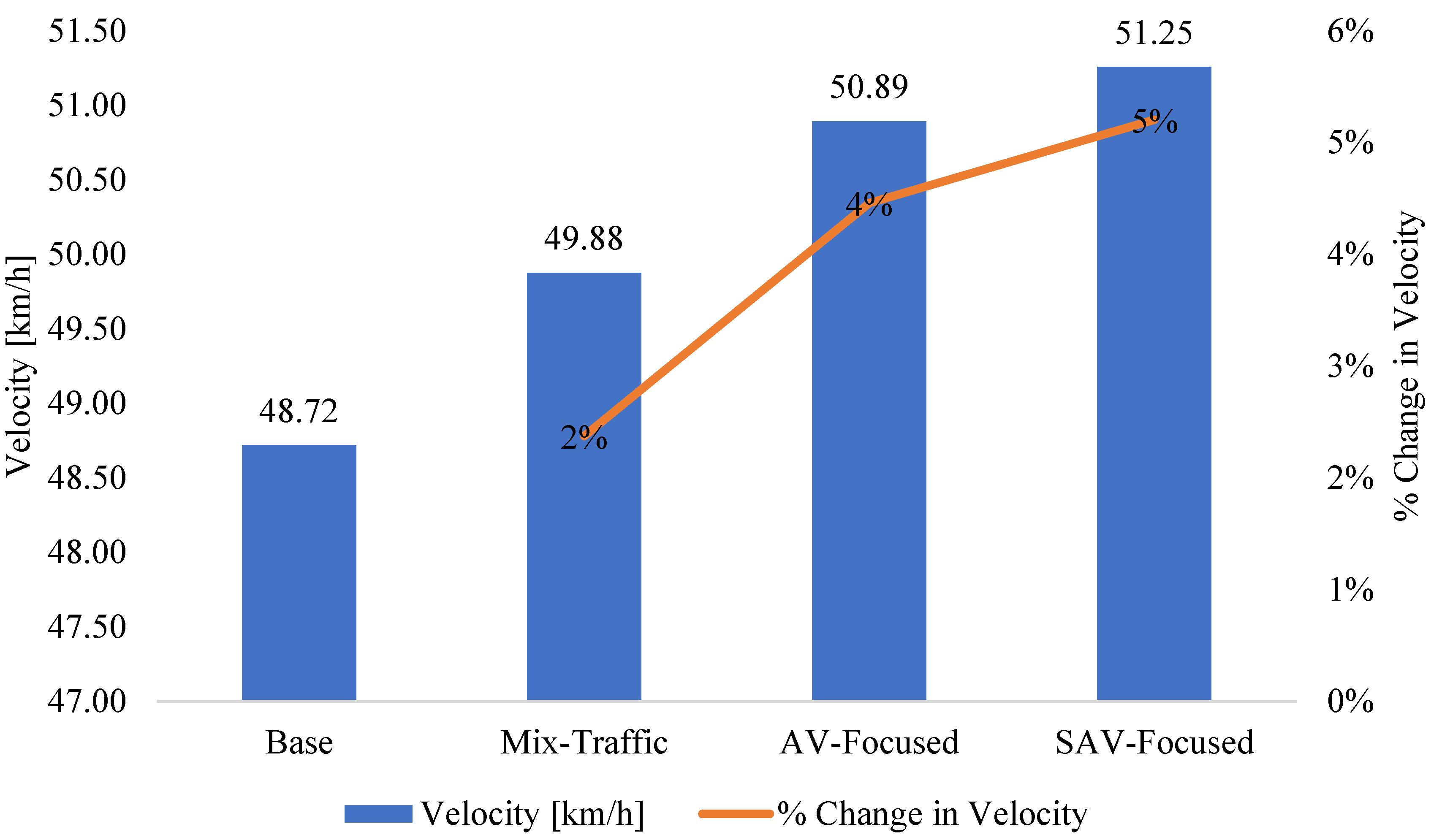
| Average Velocity | −41.129 b | 0.24 | −56.012 b | 0.32 | −60.978 b | 0.35 |
| VKT | −69.995 b | 0.40 | −30.744 a | 0.18 | −102.861 a | 0.59 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shatanawi, M.; Mészáros, F. Implications of the Emergence of Autonomous Vehicles and Shared Autonomous Vehicles: A Budapest Perspective. Sustainability 2022, 14, 10952. https://doi.org/10.3390/su141710952
Shatanawi M, Mészáros F. Implications of the Emergence of Autonomous Vehicles and Shared Autonomous Vehicles: A Budapest Perspective. Sustainability. 2022; 14(17):10952. https://doi.org/10.3390/su141710952
Chicago/Turabian StyleShatanawi, Mohamad, and Ferenc Mészáros. 2022. "Implications of the Emergence of Autonomous Vehicles and Shared Autonomous Vehicles: A Budapest Perspective" Sustainability 14, no. 17: 10952. https://doi.org/10.3390/su141710952
APA StyleShatanawi, M., & Mészáros, F. (2022). Implications of the Emergence of Autonomous Vehicles and Shared Autonomous Vehicles: A Budapest Perspective. Sustainability, 14(17), 10952. https://doi.org/10.3390/su141710952