
SOS-Based Nonlinear Observer Design for Simultaneous State and Disturbance Estimation Designed for a PMSM Model

Abstract
:1. Introduction
2. PMSM Model
3. SOS Optimization
4. SOS Based Nonlinear Observer Design
4.1. SOS Optimization Stability Constraints
4.2. SOS Optimization ISS Constraints
4.3. SOS Based Observer Design
5. Observer Design for Speed Estimation
6. Observer Design for Load Estimation
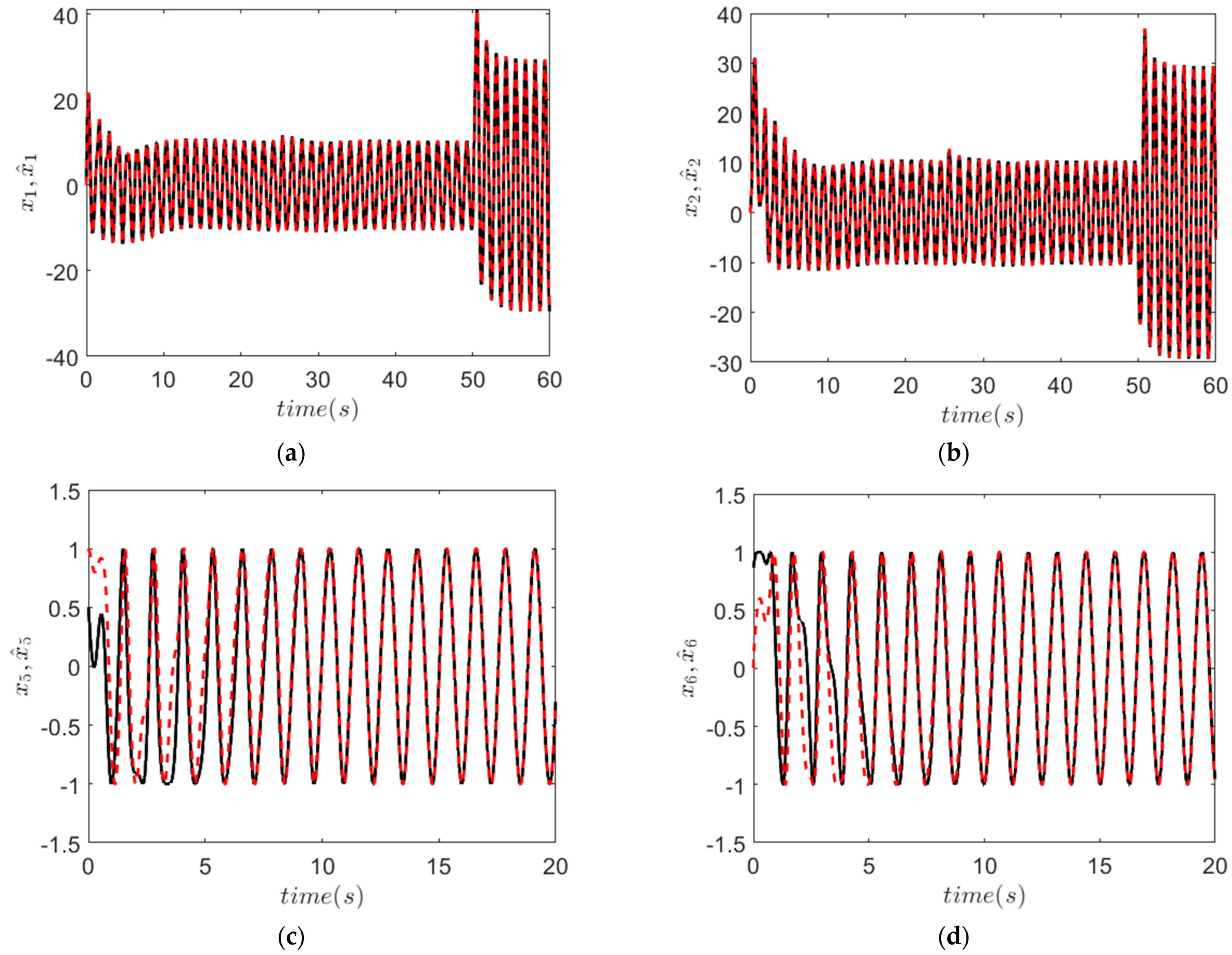
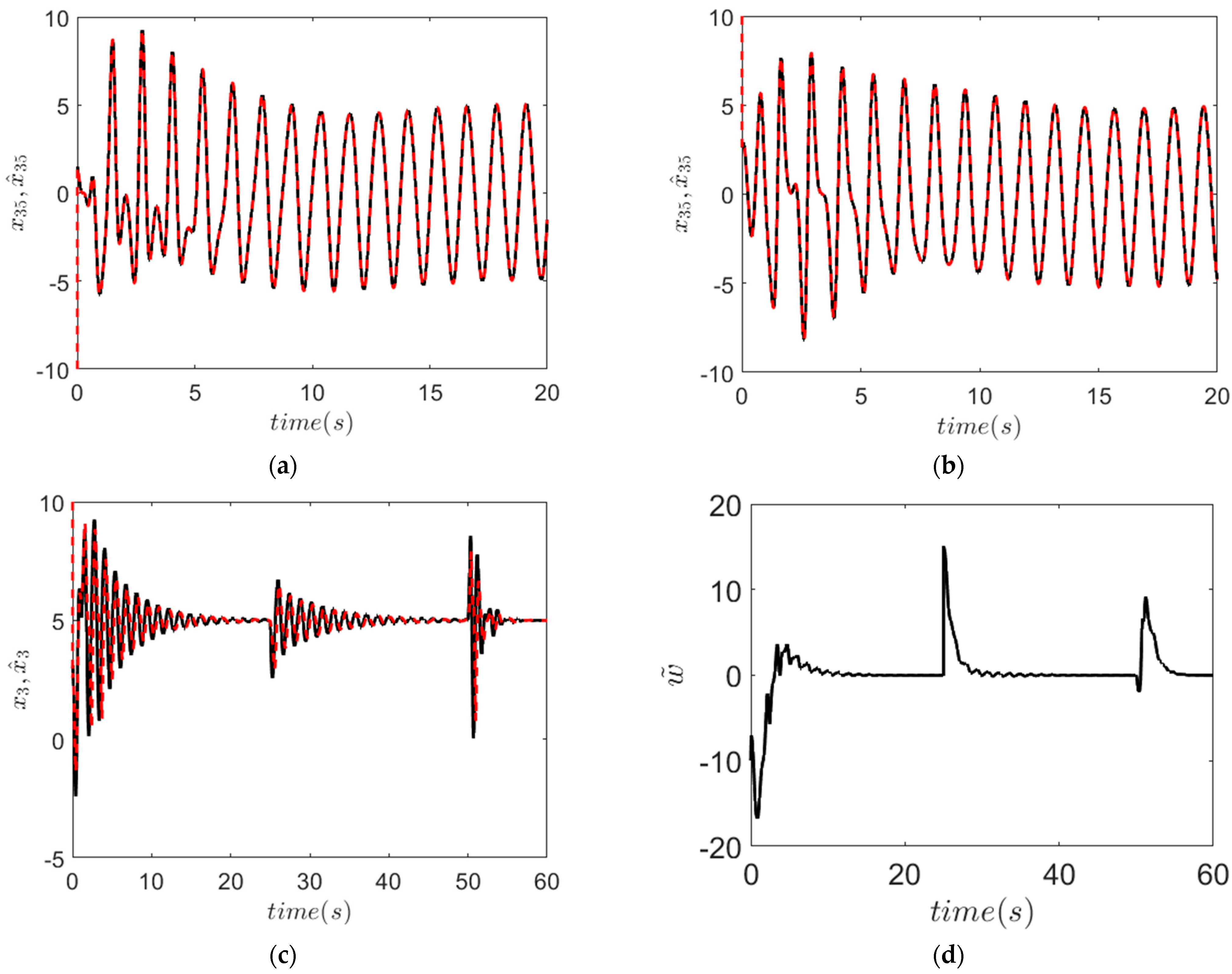
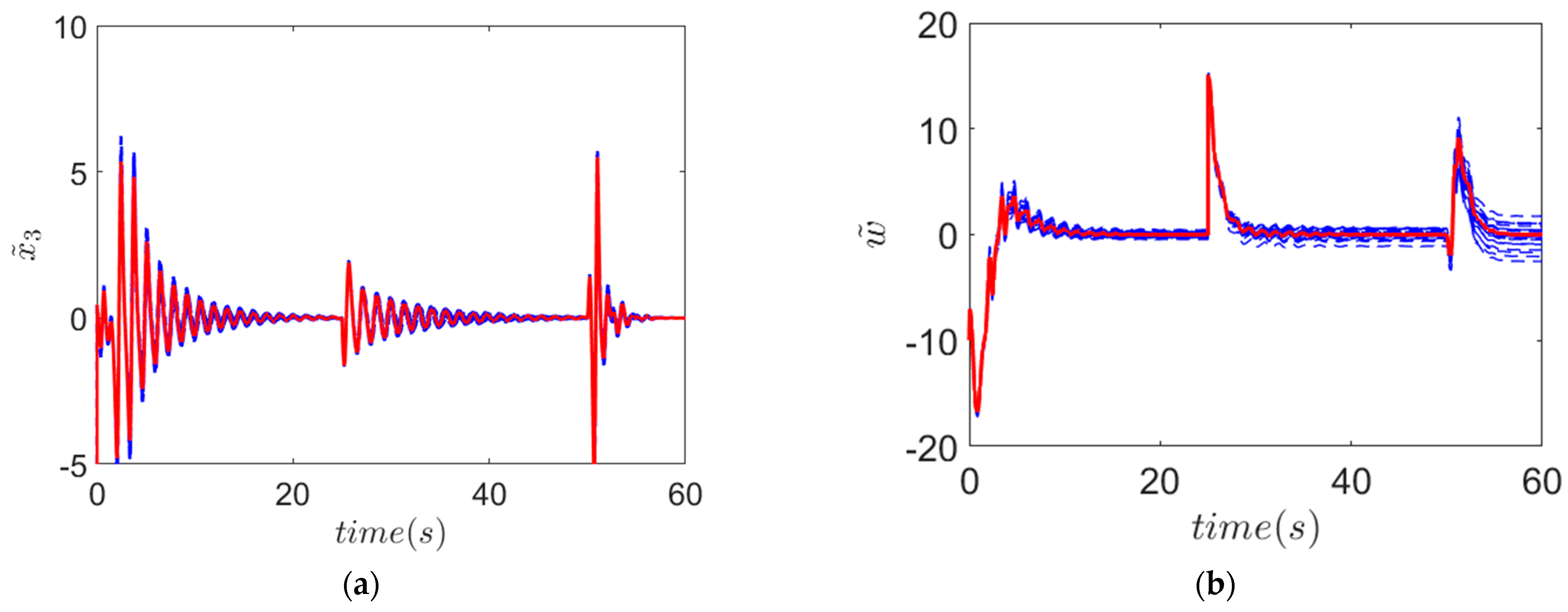
7. Numerical Simulations
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Park, I.; Kim, D.; Moon, J.; Kim, S.; Kang, Y.; Bae, S. Searching for New Technology Acceptance Model under Social Context: Analyzing the Determinants of Acceptance of Intelligent Information Technology in Digital Transformation and Implications for the Requisites of Digital Sustainability. Sustainability 2022, 14, 579. [Google Scholar] [CrossRef]
- Wang, C.; Cao, D.; Qu, X.; Fan, C. An Improved Finite Control Set Model Predictive Current Control for a Two-Phase Hybrid Stepper Motor Fed by a Three-Phase VSI. Energies 2022, 15, 1222. [Google Scholar] [CrossRef]
- Rasool, N.M.; Abbasoglu, S.; Hashemipour, M. Analysis and optimizes of hybrid wind and solar photovoltaic generation system for off-grid small village. J. Energy Syst. 2022, 6, 176–187. [Google Scholar] [CrossRef]
- Thoppil, A.; Akbar, M.; Rambabu, D. Dynamic analysis of a tri-floater with vertical axis wind turbine supported at its centroid. J. Energy Syst. 2021, 5, 10–19. [Google Scholar] [CrossRef]
- Lee, C.-Y.; Zhuo, G.-L.; Le, T.-A. A Robust Deep Neural Network for Rolling Element Fault Diagnosis under Various Operating and Noisy Conditions. Sensors 2022, 22, 4705. [Google Scholar] [CrossRef]
- Liu, Y.; Fang, J.; Tan, K.; Huang, B.; He, W. Sliding Mode Observer with Adaptive Parameter Estimation for Sensorless Control of IPMSM. Energies 2020, 13, 5991. [Google Scholar] [CrossRef]
- Kim, T.; Park, T.-H. Extended Kalman Filter (EKF) Design for Vehicle Position Tracking Using Reliability Function of Radar and Lidar. Sensors 2020, 20, 4126. [Google Scholar] [CrossRef]
- Lv, M.; Li, X.; Li, Y.; Zhang, W.; Guo, R. UKF-Based State Estimation for Electrolytic Oxygen Generation System of Space Station. Appl. Sci. 2021, 11, 2021. [Google Scholar] [CrossRef]
- Elfring, J.; Torta, E.; van de Molengraft, R. Particle Filters: A Hands-On Tutorial. Sensors 2021, 21, 438. [Google Scholar] [CrossRef]
- Huang, Y.-S.; Sheriff, M.Z.; Bachawala, S.; Gonzalez, M.; Nagy, Z.K.; Reklaitis, G.V. Evaluation of a Combined MHE-NMPC Approach to Handle Plant-Model Mismatch in a Rotary Tablet Press. Processes 2021, 9, 1612. [Google Scholar] [CrossRef]
- Aliskan, I. Adaptive Model Predictive Control for Wiener Nonlinear Systems. Iran. J. Sci. Technol. 2019, 43, 361–377. [Google Scholar] [CrossRef]
- Sriram, C.; Somlal, J.; Goud, B.S.; Bajaj, M.; Elnaggar, M.F.; Kamel, S. Improved Deep Neural Network (IDNN) with SMO Algorithm for Enhancement of Third Zone Distance Relay under Power Swing Condition. Mathematics 2022, 10, 1944. [Google Scholar] [CrossRef]
- Rodriguez-Mata, A.E.; Bustos-Terrones, Y.; Gonzalez-Huitrón, V.; Lopéz-Peréz, P.A.; Hernández-González, O.; Amabilis-Sosa, L.E. A Fractional High-Gain Nonlinear Observer Design—Application for Rivers Environmental Monitoring Model. Math. Comput. Appl. 2020, 25, 44. [Google Scholar] [CrossRef]
- Butkus, M.; Levišauskas, D.; Galvanauskas, V. Simple Gain-Scheduled Control System for Dissolved Oxygen Control in Bioreactors. Processes 2021, 9, 1493. [Google Scholar] [CrossRef]
- Jiao, Z.; Wu, J.; Chen, Z.; Wang, F.; Li, L.; Kong, Q.; Lin, F. Research on Takagi-Sugeno Fuzzy-Model-Based Vehicle Stability Control for Autonomous Vehicles. Actuators 2022, 11, 143. [Google Scholar] [CrossRef]
- Lien, Y.-H.; Peng, C.-C.; Chen, Y.-H. Adaptive Observer-Based Fault Detection and Fault-Tolerant Control of Quadrotors under Rotor Failure Conditions. Appl. Sci. 2020, 10, 3503. [Google Scholar] [CrossRef]
- Wang, Y.; Yu, H.; Che, Z.; Wang, Y.; Zeng, C. Extended State Observer-Based Predictive Speed Control for Permanent Magnet Linear Synchronous Motor. Processes 2019, 7, 618. [Google Scholar] [CrossRef]
- Zhang, C.; Guo, C.; Zhang, D. Data Fusion Based on Adaptive Interacting Multiple Model for GPS/INS Integrated Navigation System. Appl. Sci. 2018, 8, 1682. [Google Scholar] [CrossRef]
- Coelho, M.; Bousson, K.; Ahmed, K. An Improved Extended Kalman Filter for Radar Tracking of Satellite Trajectories. Designs 2021, 5, 54. [Google Scholar] [CrossRef]
- Ran, C.; Cheng, X. A Direct and Non-Singular UKF Approach Using Euler Angle Kinematics for Integrated Navigation Systems. Sensors 2016, 16, 1415. [Google Scholar] [CrossRef] [Green Version]
- Peng, C.-C. Nonlinear Integral Type Observer Design for State Estimation and Unknown Input Reconstruction. Appl. Sci. 2017, 7, 67. [Google Scholar] [CrossRef]
- Charitopoulos, V.M.; Papageorgiou, L.G.; Dua, V. Multi Set-Point Explicit Model Predictive Control for Nonlinear Process Systems. Processes 2021, 9, 1156. [Google Scholar] [CrossRef]
- Ali, I.A.; Elshafei, A.L. Model predictive control stabilization of a power system including a wind power plant. J. Energy Syst. 2022, 6, 188–208. [Google Scholar] [CrossRef]
- Chan, J.C.L.; Lee, T.H. Sliding Mode Observer-Based Fault-Tolerant Secondary Control of Microgrids. Electronics 2020, 9, 1417. [Google Scholar] [CrossRef]
- Wang, P.; Zhang, C.; Zhu, L.; Wang, C. High-Gain Observer-Based Sliding-Mode Dynamic Surface Control for Particleboard Glue Mixing and Dosing System. Algorithms 2018, 11, 166. [Google Scholar] [CrossRef]
- Silva, S.N.; Lopes, F.F.; Valderrama, C.; Fernandes, M.A.C. Proposal of Takagi–Sugeno Fuzzy-PI Controller Hardware. Sensors 2020, 20, 1996. [Google Scholar] [CrossRef]
- Ellouze, A.; Kahouli, O.; Ksantini, M.; Rebhi, A.; Hnaien, N.; Delmotte, F. Continuous Stability TS Fuzzy Systems Novel Frame Controlled by a Discrete Approach and Based on SOS Methodology. Mathematics 2021, 9, 3129. [Google Scholar] [CrossRef]
- Ahmed, H.; Benbouzid, M. Adaptive Observer-Based Grid-Synchronization and Sequence Extraction Techniques for Renewable Energy Systems: A Comparative Analysis. Appl. Sci. 2021, 11, 653. [Google Scholar] [CrossRef]
- He, F.; Cao, D.; Wu, J.; Li, J. Event-Triggered, Adaptive, Exponentially Asymptotic Tracking Control of Stochastic Nonlinear Systems. Symmetry 2022, 14, 451. [Google Scholar] [CrossRef]
- Hoai, H.-K.; Chen, S.-C.; Than, H. Realization of the Sensorless Permanent Magnet Synchronous Motor Drive Control System with an Intelligent Controller. Electronics 2020, 9, 365. [Google Scholar] [CrossRef] [Green Version]
- Furmanik, M.; Gorel, L.; Konvičný, D.; Rafajdus, P. Comparative Study and Overview of Field-Oriented Control Techniques for Six-Phase PMSMs. Appl. Sci. 2021, 11, 7841. [Google Scholar] [CrossRef]
- Matthew, M.P. Full-State Feedback of Delayed Systems using SOS: A New Theory of Duality. IFAC Proc. Vol. 2013, 46, 24–29. [Google Scholar] [CrossRef]
- Wang, T.-C.; Lall, S.; Chiou, T.-Y. Polynomial Method for PLL Controller Optimization. Sensors 2011, 11, 6575–6592. [Google Scholar] [CrossRef]
- Alessandri, A. Lyapunov Functions for State Observers of Dynamic Systems Using Hamilton–Jacobi Inequalities. Mathematics 2020, 8, 202. [Google Scholar] [CrossRef]
- Pitarch, J.L.; Sala, A.; de Prada, C. A Systematic Grey-Box Modeling Methodology via Data Reconciliation and SOS Constrained Regression. Processes 2019, 7, 170. [Google Scholar] [CrossRef]
- Chiu, C.-H.; Peng, Y.-F. Design of Takagi-Sugeno Fuzzy Control Scheme for Real World System Control. Sustainability 2019, 11, 3855. [Google Scholar] [CrossRef]
- Pylorof, D.; Bakolas, E.; Chan, K.S. Design of Robust Lyapunov-Based Observers for Nonlinear Systems with Sum-of-Squares Programming. IEEE Control Syst. Lett. 2020, 4, 283–288. [Google Scholar] [CrossRef]
- Clarke, F.H.; Ledyaev, Y.S.; Sontag, E.D.; Subbotin, A.I. Asymptotic controllability implies feedback stabilization. IEEE Trans. Autom. Control 1997, 42, 1394–1407. [Google Scholar] [CrossRef]
- Xue, Y.; Zhao, P. Input-to-State Stability and Stabilization of Nonlinear Impulsive Positive Systems. Mathematics 2021, 9, 1663. [Google Scholar] [CrossRef]
- Ichihara, H. Sum of squares based input-to-state stability analysis of polynomial nonlinear systems. SICE J. Control. Meas. Syst. Integr. 2012, 5, 218–225. [Google Scholar] [CrossRef]
- Löfberg, J. YALMIP: A toolbox for modeling and optimization in MATLAB. In Proceedings of the 2004 IEEE International Symposium on Computer Aided Control Systems Design, Taipei, Taiwan, 2–4 September 2004. [Google Scholar]
- ApS, M. Mosek optimization toolbox for matlab. In User’s Guide and Reference Manual; Version 4; MOSEK: Copenhagen, Denmark, 2019. [Google Scholar]
- Fiala, J.; Kocvara, M.; Stingl, M. PENLAB: A MATLAB solver for nonlinear semidefinite optimization. arXiv 2013, arXiv:1311.5240. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
| Time (s) | Voltage Inputs | Load Term |
|---|---|---|
| 0–25 | ||
| 25–50 | ||
| 50–60 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sel, A.; Sel, B.; Coskun, U.; Kasnakoglu, C. SOS-Based Nonlinear Observer Design for Simultaneous State and Disturbance Estimation Designed for a PMSM Model. Sustainability 2022, 14, 10650. https://doi.org/10.3390/su141710650
Sel A, Sel B, Coskun U, Kasnakoglu C. SOS-Based Nonlinear Observer Design for Simultaneous State and Disturbance Estimation Designed for a PMSM Model. Sustainability. 2022; 14(17):10650. https://doi.org/10.3390/su141710650
Chicago/Turabian StyleSel, Artun, Bilgehan Sel, Umit Coskun, and Cosku Kasnakoglu. 2022. "SOS-Based Nonlinear Observer Design for Simultaneous State and Disturbance Estimation Designed for a PMSM Model" Sustainability 14, no. 17: 10650. https://doi.org/10.3390/su141710650
APA StyleSel, A., Sel, B., Coskun, U., & Kasnakoglu, C. (2022). SOS-Based Nonlinear Observer Design for Simultaneous State and Disturbance Estimation Designed for a PMSM Model. Sustainability, 14(17), 10650. https://doi.org/10.3390/su141710650