
Study on Propagation Characteristics of Ground Penetrating Radar Wave in Dikes and Dams with Polymer Grouting Repair Using Finite-Difference Time-Domain with Perfectly Matched Layer Boundary Condition



Abstract
:1. Introduction
2. Basic Principles
2.1. Ground-Penetrating Radar
2.2. Finite Difference Time-Domain Method
3. Calculation Model
3.1. Application Conditions
3.2. The Model Parameters of Dikes and Dams
4. Forward Simulation
4.1. Water-Filled Cave
4.2. Air-Filled Cave
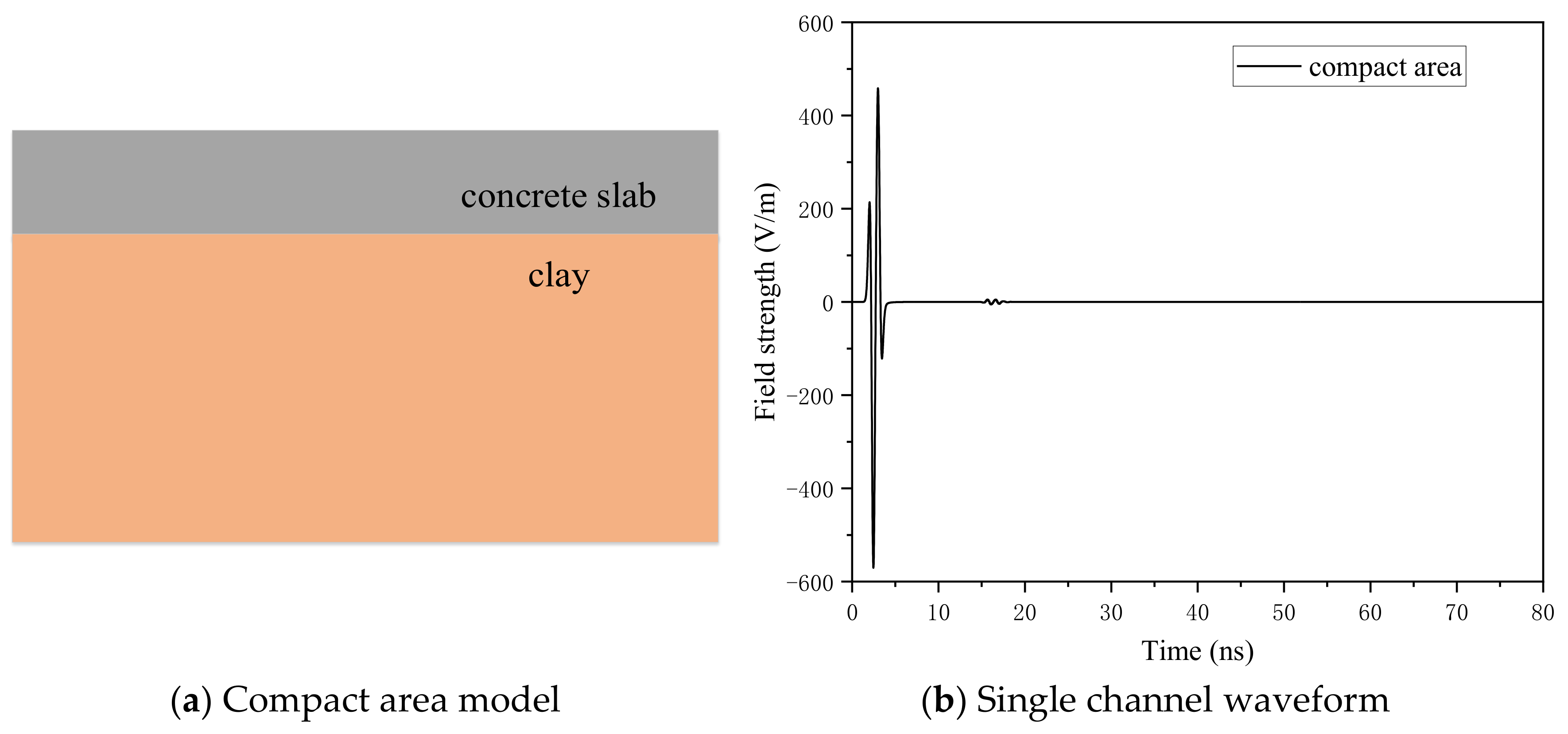
4.3. Incompact Area
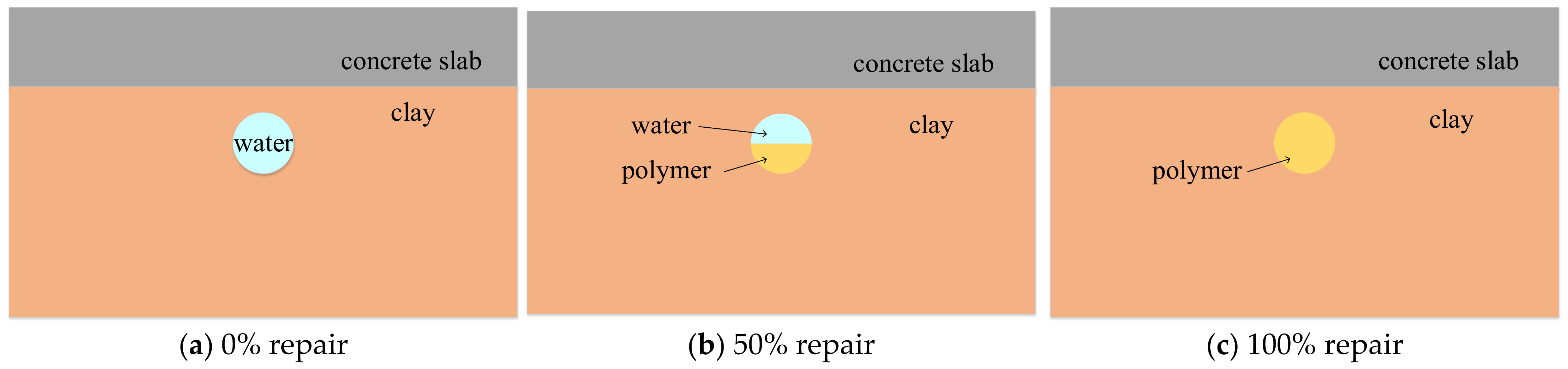
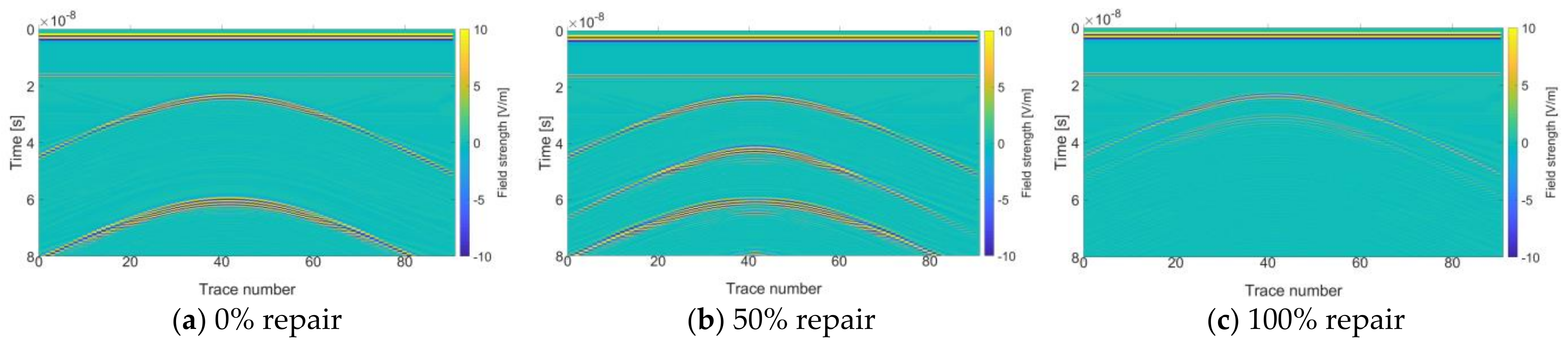
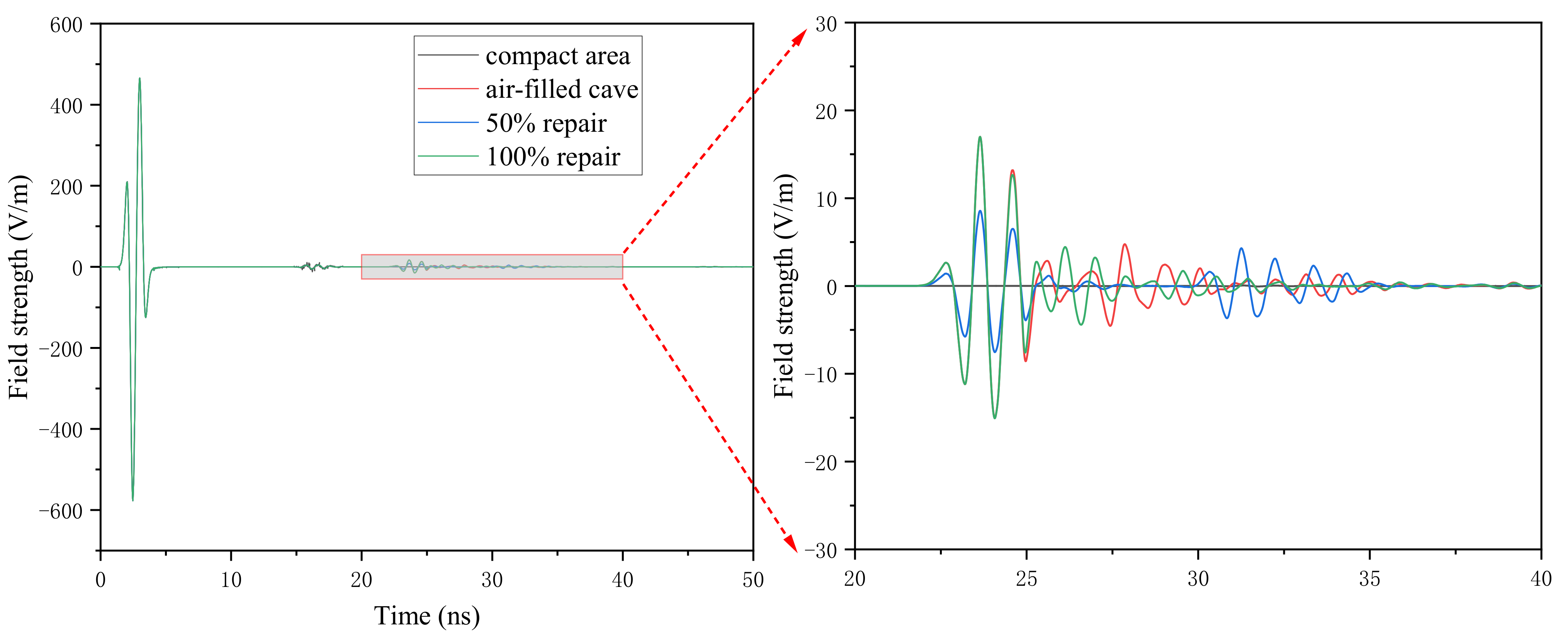
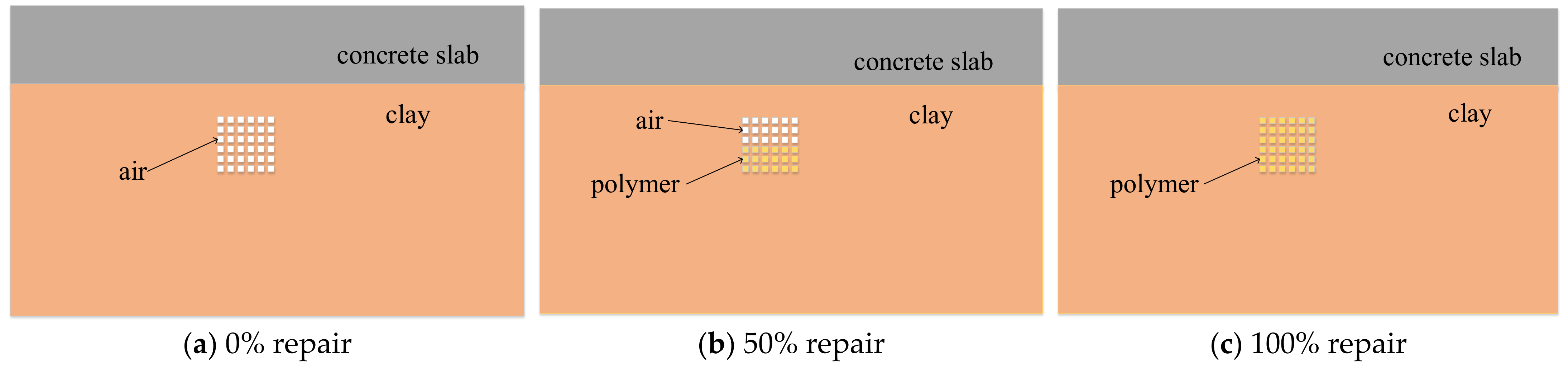
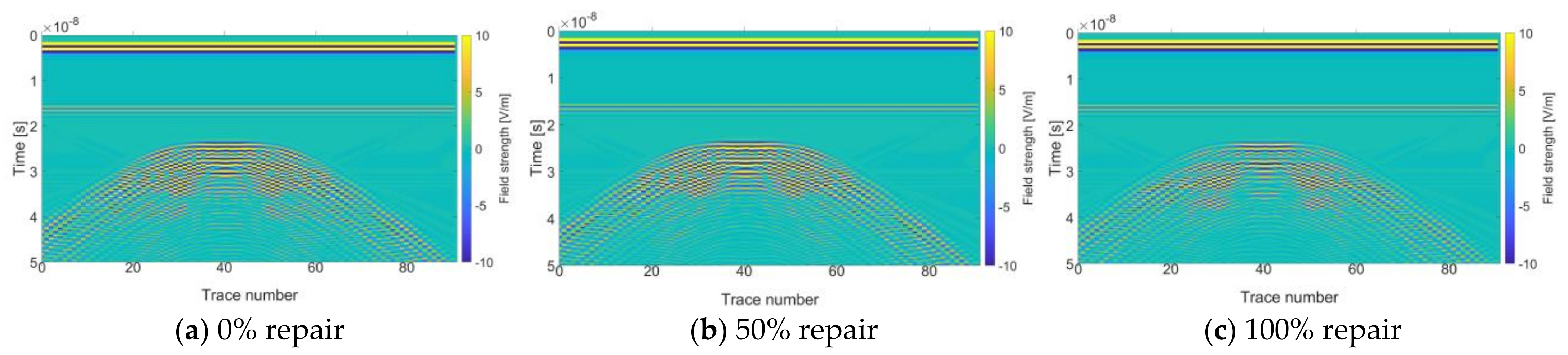
4.3.1. Different Degrees of Repair
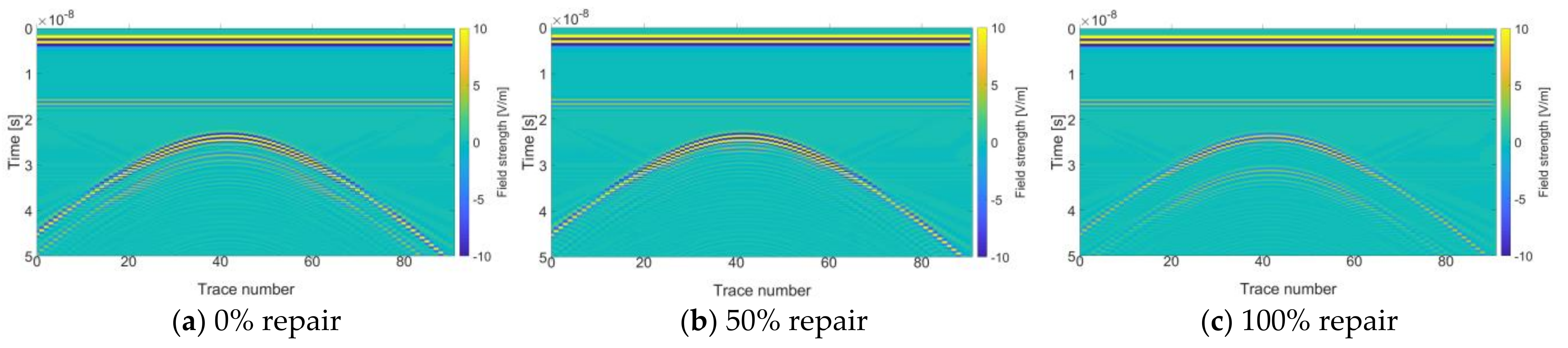
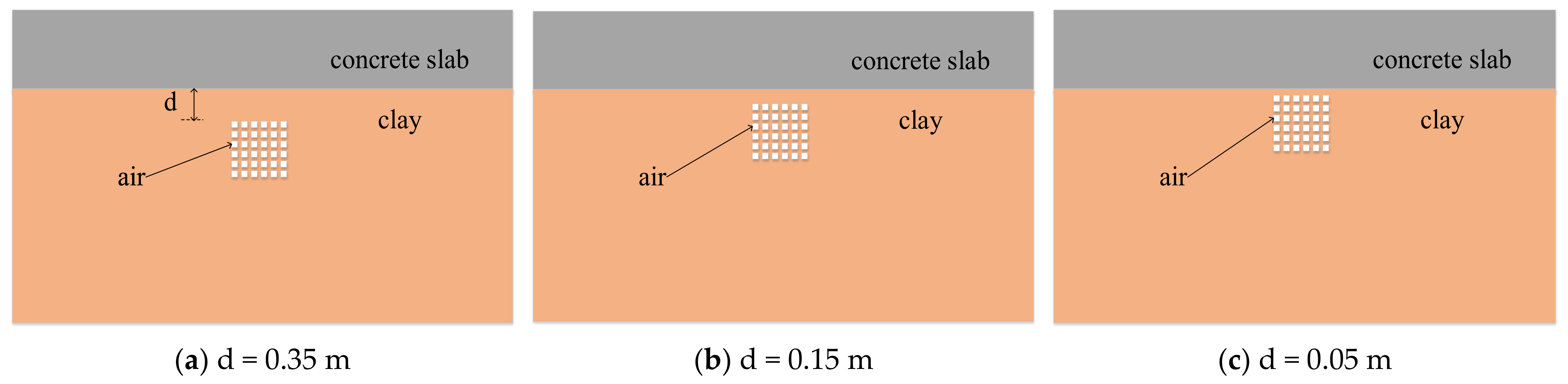
4.3.2. Different Distance between Center Point of the Incompact Area to the Dam Surface
5. Conclusions
- (1)
- GPR can accurately identify shallow diseases such as water-filled caves, air-filled caves, and incompact areas. According to the reflection wave shape, amplitude, transmission time interval in the forward simulation profiles, and the reflection amplitude of single channel waveforms, the spatial distribution characteristics such as the water level position, the type, and depth of shallow diseases can be obtained.
- (2)
- The forward simulation profiles of dikes and dams with water-filled caves before and after polymer grouting repair present two clusters of hyperbolas. There were three clusters of hyperbolas with different amplitudes that were observed at 50% repair. The A-scan images of water-filled cave before and after repair showed two reflection waves, while the A-scan images of 50% of water-filled cave showed three reflection waves. When polymer grouting is used to repair the air-filled cave, the amplitude and reflection interval in the forward simulation profiles and the single channel waveforms before repair, 50% repair, and 100% repair are different. The air-filled cave repair can be evaluated by the amplitude of the forward simulation profile and the reflections the interval in the single channel waveform.
- (3)
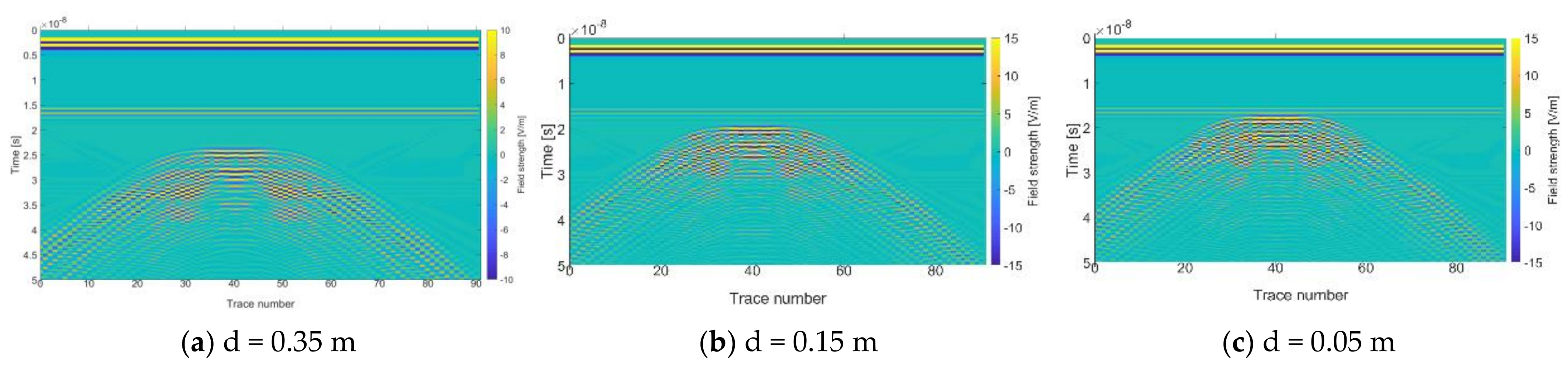
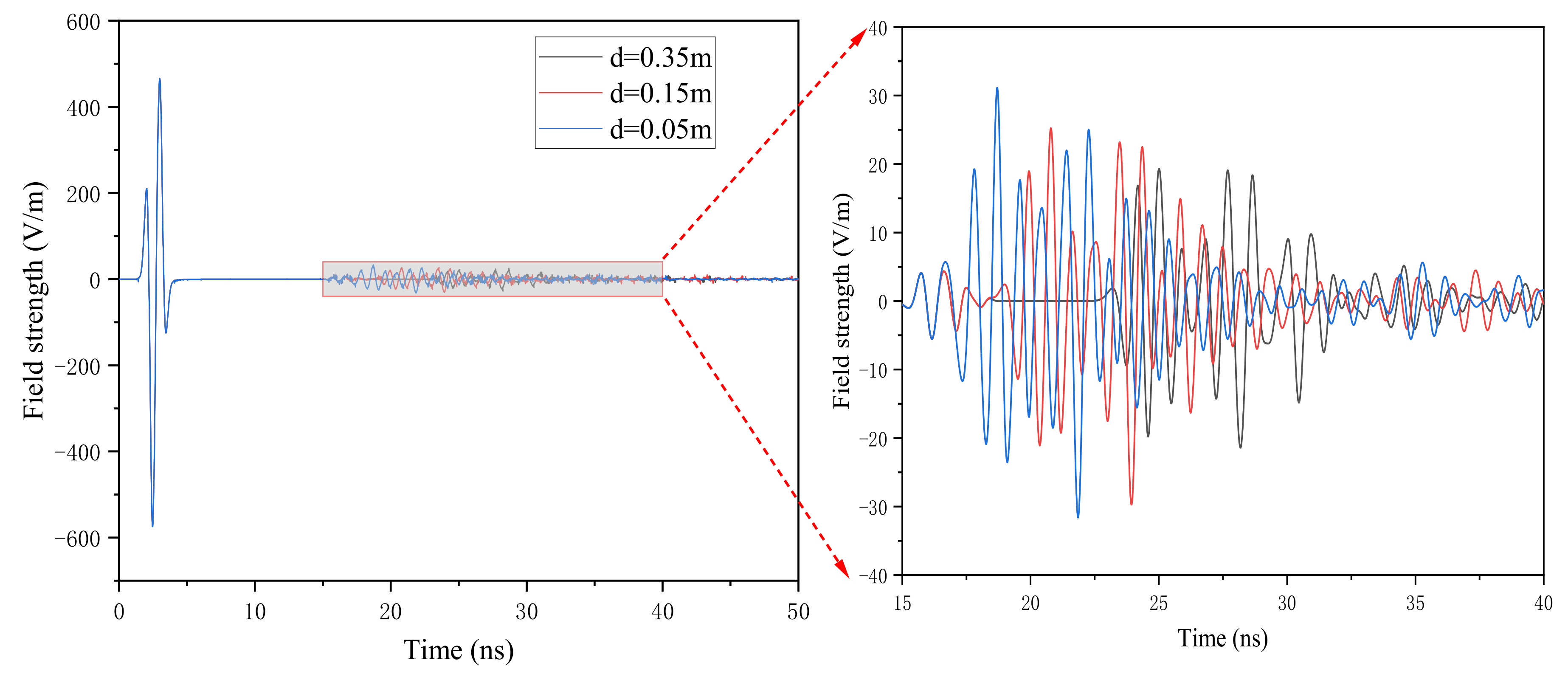
- When detecting the incompact area, as the distance between center point of the incompact area to the dam surface gradually decreases, the top of the curve in the forward profile moves upward and the top amplitude of the curve becomes larger. When polymer grouting is used to repair the incompact area, the top amplitude of the forward simulation profiles and single channel waveforms before repair and 50% repair are significantly bigger than that of 100% repair. The incompact area can be evaluated by the amplitude of the forward simulation profile and single channel waveform.
- (4)
- The GPR propagation characteristics in dikes and dams with different shallow diseases using polymer grouting repair are analyzed. It provides theoretical basis for using the ground-penetrating radar to evaluate the effect of polymer grouting technology to repair dikes and dams with shallow diseases.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Pang, R.; Xu, B.; Zhou, Y.; Zhang, X.; Wang, X. Fragility analysis of high CFRDs subjected to mainshock-aftershock sequences based on plastic failure. Eng. Struct. 2020, 206, 110152. [Google Scholar] [CrossRef]
- Wang, F.; Li, J.; Shi, M.; Guo, C. New seepage-proof and reinforcing technologies for dikes and dams and their applications. J. Hydroelectr. Eng. 2016, 35, 1–11. [Google Scholar]
- Liang, J.; Du, X.; Fang, H. Numerical and experimental study of diffusion law of foamed polymer grout in fracture considering viscosity variation of slurry. Tunn. Undergr. Space Technol. 2022, 128, 10467. [Google Scholar] [CrossRef]
- Miao, Y.; He, H.; Li, Z. Strain hardening behaviors and mechanisms of polyurethane under various strain rate loading. Polym. Eng. Sci. 2020, 60, 1083–1092. [Google Scholar] [CrossRef]
- Chen, J.; Yin, X.; Wang, H.; Ding, Y. Evaluation of durability and functional performance of porous polyurethane mixture in porous pavement. J. Clean. Prod. 2018, 188, 12–19. [Google Scholar] [CrossRef]
- Li, M.; Du, M.; Wang, F.; Xue, B.; Zhang, C.; Fang, H. Study on the mechanical properties of polyurethane (PU) grouting material of different geometric sizes under uniaxial compression. Constr. Build. Mater. 2020, 259, 119797. [Google Scholar] [CrossRef]
- Shi, M.; Wang, F.; Luo, J. Compressive strength of polymer grouting material at different temperatures. J. Wuhan Univ. Technol.-Mater. Sci. Ed. 2010, 25, 962–965. [Google Scholar] [CrossRef]
- Fang, H.; Su, Z.; Li, X.; Wang, F.; Fu, Y. Interfacial bond performance between self-expansion polymer and concrete. Constr. Build. Mater. 2021, 270, 121459. [Google Scholar] [CrossRef]
- Wang, Y.; Han, M.; Cao, T.; Yu, X.; Song, Y. Cyclic interface behavior of non-water reactive polymer and concrete during dam restoration. Structures 2021, 34, 748–757. [Google Scholar] [CrossRef]
- Li, M.; Fang, H.; Du, M.; Zhang, C.; Su, Z.; Wang, F. The behavior of polymer-bentonite interface under shear stress. Constr. Build. Mater. 2020, 248, 118680. [Google Scholar] [CrossRef]
- Wang, F.; Guo, C.; Gao, Y. Formation of a Polymer Thin Wall Using the Level Set Method. Int. J. Geomech. 2014, 14, 4014021. [Google Scholar] [CrossRef]
- Li, J.; Zhang, J.; Xu, J.; Wang, F.; Wang, B.; Li, Q. Dynamic behavior of polymer antiseepage wall for earth dam by centrifuge test. Int. J. Geomech. 2018, 18, 04018179. [Google Scholar] [CrossRef]
- Li, J.; Zhang, J.; Wang, Y.; Wang, B. Seismic Response of Earth Dam with Innovative Polymer Antiseepage Wall. Int. J. Geomech. 2020, 20, 04020079. [Google Scholar] [CrossRef]
- Fang, H.; Zhang, H.; Xue, B.; Gao, J.; Li, Y.; Gao, X.; Tian, A. Coordination Characteristics Analysis of Deformation between Polymer Anti-Seepage Wall and Earth Dam under Traffic Load. Water 2022, 14, 1442. [Google Scholar] [CrossRef]
- Zhang, S.; Xue, B.; Wang, J.; Gao, J.; Wang, C.; Li, W. Preliminary Study of Nondestructive Testing of the Polymer Cutoff Wall Based on Vibration Theory. Adv. Mater. Sci. Eng. 2021, 2021, 4444684. [Google Scholar] [CrossRef]
- Guo, C.; Chu, X.; Wang, F. The feasibility of non-water reaction polymer grouting technology application in seepage prevention for tailings reservoirs. Water Sci. Technol.—Water Supply 2018, 18, 203–213. [Google Scholar] [CrossRef]
- Luo, T.X.H.; Lai, W.W.L.; Chang, R.K.W.; Goodman, D. GPR imaging criteria. J. Appl. Geophys. 2019, 165, 37–48. [Google Scholar] [CrossRef]
- Lei, J.; Fang, H.; Xue, B.; Li, Y. A Parallel Conformal Symplectic Euler Algorithm for GPR Numerical Simulation on Dispersive Media. IEEE Geosci. Remote Sens. Lett. 2022, 19, 3502605. [Google Scholar] [CrossRef]
- Nelson, P.A. The Role of GPR in Community-Driven Compliance Archaeology with Tribal and Non-tribal Communities in Central California. Adv. Archaeol. Pract. 2021, 9, 215–225. [Google Scholar] [CrossRef]
- Solla, M.; Pérez-Gracia, V.; Fontul, S. A Review of GPR Application on Transport Infrastructures: Troubleshooting and Best Practices. Remote Sens. 2021, 13, 672. [Google Scholar] [CrossRef]
- Jiao, L.; Ye, Q.; Cao, X.; Huston, D.; Xia, T. Identifying concrete structure defects in GPR image. Measurement 2020, 160, 107839. [Google Scholar] [CrossRef]
- Xie, X.; Yao, R.; Qin, H.; Liu, H. Study on radargram characteristics of the backfill grouting quality evaluation of a shield tunnel using GPR. In Proceedings of the 15th International Conference on Ground Penetrating Radar, Brussels, Belgium, 30 June–4 July 2014; pp. 407–412. [Google Scholar]
- Hugenschmidt, J.; Kalogeropoulos, A. The inspection of retaining walls using GPR. J. Appl. Geophys. 2009, 67, 335–344. [Google Scholar] [CrossRef]
- Zajícová, K.; Chuman, T. Application of ground penetrating radar methods in soil studies: A review. Geoderma 2019, 343, 116–129. [Google Scholar] [CrossRef]
- Al-Dujaili, M.J.; Zalzala, R.A. Implementation of SAR Radar Imaging Algorithm on GPR and Correction of Its Phase Error in War Mine Detection. Sens. Imaging 2021, 22, 29. [Google Scholar] [CrossRef]
- Hui, L.; Haitao, M. Application of Ground Penetrating Radar in Dam Body Detection. Procedia Eng. 2011, 26, 1820–1826. [Google Scholar] [CrossRef]
- Chen, L.; Liu, J.G.; Wang, Y.F.; Niu, J. The Application of Two Dimensional Numerical Simulation Method of Ground Penetrating Radar in Concrete Dam Nondestructive Testing. Adv. Mater. Res. 2014, 1030–1032, 879–884. [Google Scholar] [CrossRef]
- Alsharahi, G.; Faize, A.; Louzazni, M.; Mostapha, A.M.M.; Bayjja, M.; Driouach, A. Detection of cavities and fragile areas by numerical methods and GPR application. J. Appl. Geophys. 2019, 164, 225–236. [Google Scholar] [CrossRef]
- Xie, X.; Zhai, J.; Zhou, B. Back-fill grouting quality evaluation of the shield tunnel using ground penetrating radar with bi-frequency back projection method. Autom. Constr. 2021, 121, 103435. [Google Scholar] [CrossRef]
- Zhang, F.; Xie, X.; Huang, H. Application of ground penetrating radar in grouting evaluation for shield tunnel construction. Tunn. Undergr. Space Technol. 2010, 25, 99–107. [Google Scholar] [CrossRef]
- Alsharahi, G.; Faize, A.; Maftei, C.; Bayjja, M.; Louzazni, M.; Driouach, A.; Khamlichi, A. Analysis and Modeling of GPR Signals to Detect Cavities: Case Studies in Morocco. J. Electromagn. Eng. Sci. 2019, 19, 177–187. [Google Scholar] [CrossRef]
- Alsharahi, G.; Faize, A.; Driouach, A.; Mostapha, A.M.M. Determination of the Physical Properties and Geometric Shape of Objects Buried by Simulation Signals Radar GPR. In Proceedings of the 2019 8th International Conference on Modeling Simulation and Applied Optimization (ICMSAO), Manama, Bahrain, 15–17 April 2019; pp. 1–4. [Google Scholar]
- Warren, C.; Giannopoulos, A.; Gray, A.; Giannakis, I.; Patterson, A.; Wetter, L.; Hamrah, A. A CUDA-based GPU engine for gprMax: Open source FDTD electromagnetic simulation software. Comput. Phys. Commun. 2019, 237, 208–218. [Google Scholar] [CrossRef]
- Lax, M.; Nelson, D.F. Maxwell equations in material form. Phys. Rev. B Solid State 1976, 13, 1777–1784. [Google Scholar] [CrossRef]
- Chen, H.; Huang, T. Finite-difference time-domain simulation of GPR data. J. Appl. Geophys. 1998, 40, 139–163. [Google Scholar] [CrossRef]
- Yee, K.S. Numerical solution of initial boundary value problems involving Maxwell’s equation in isotropic media. IEEE Trans. Antennas Propag. 1966, 14, 302–307. [Google Scholar]
- Berenger, J.P. A perfectly matched layer for the absorption of electromagnetic waves. J. Comput. Phys. 1994, 114, 185–200. [Google Scholar] [CrossRef]
- Chen, J. Forward Simulation and Data Analysis of GPR for the Concrete Cavity Based on GprMax3.0. Master’s Thesis, Changsha University of Science & Technology, Changsha, China, 2018. [Google Scholar]
- Li, B.; Guo, S.; Yue, G.; Tian, P.; Cai, W. Study on effective permittivity of two-phase mixture based on GPR numerical simulation. Prog. Geophys. 2021, 36, 736–745. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Type | Numerical Value |
|---|---|
| Forward model size/m | 5 × 3 |
| Spatial grid step/m | 0.0025 × 0.0025 |
| Time window/ns | 80 |
| Initial transmit antenna coordinates/m | (0.4, 2.95) |
| Initial receiving antenna coordinates/m | (0.5, 2.95) |
| Antenna step distance/m | 0.05 |
| Number of lines | 90 |
| Excitation source frequency/MHz | 900 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dong, Z.; Xue, B.; Lei, J.; Zhao, X.; Gao, J. Study on Propagation Characteristics of Ground Penetrating Radar Wave in Dikes and Dams with Polymer Grouting Repair Using Finite-Difference Time-Domain with Perfectly Matched Layer Boundary Condition. Sustainability 2022, 14, 10293. https://doi.org/10.3390/su141610293
Dong Z, Xue B, Lei J, Zhao X, Gao J. Study on Propagation Characteristics of Ground Penetrating Radar Wave in Dikes and Dams with Polymer Grouting Repair Using Finite-Difference Time-Domain with Perfectly Matched Layer Boundary Condition. Sustainability. 2022; 14(16):10293. https://doi.org/10.3390/su141610293
Chicago/Turabian StyleDong, Zhifeng, Binghan Xue, Jianwei Lei, Xiaohua Zhao, and Jianglin Gao. 2022. "Study on Propagation Characteristics of Ground Penetrating Radar Wave in Dikes and Dams with Polymer Grouting Repair Using Finite-Difference Time-Domain with Perfectly Matched Layer Boundary Condition" Sustainability 14, no. 16: 10293. https://doi.org/10.3390/su141610293
APA StyleDong, Z., Xue, B., Lei, J., Zhao, X., & Gao, J. (2022). Study on Propagation Characteristics of Ground Penetrating Radar Wave in Dikes and Dams with Polymer Grouting Repair Using Finite-Difference Time-Domain with Perfectly Matched Layer Boundary Condition. Sustainability, 14(16), 10293. https://doi.org/10.3390/su141610293