
Crosswalk Safety Warning System for Pedestrians to Cross the Street Intelligently

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
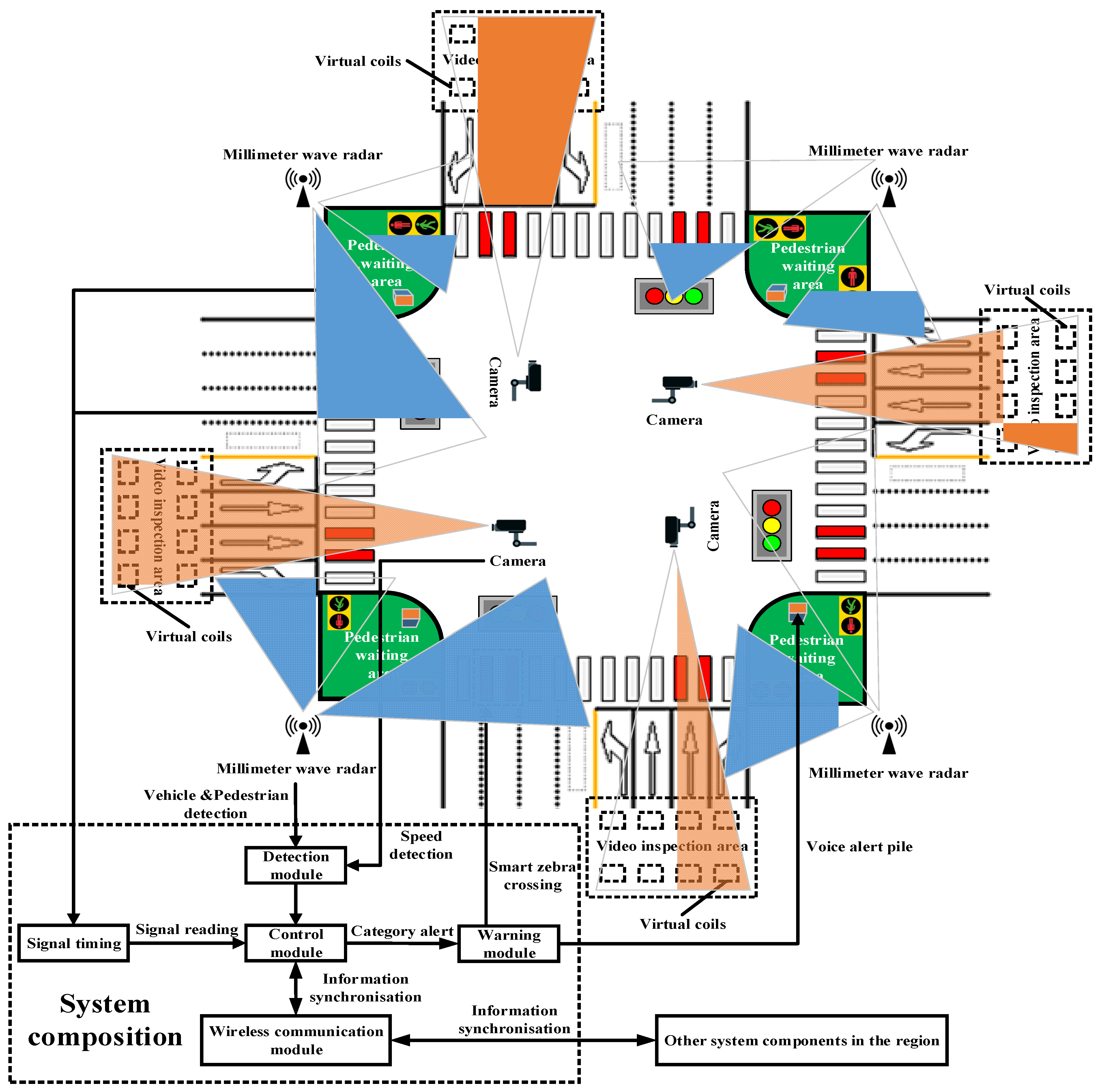
2. System Design
2.1. Detection Module
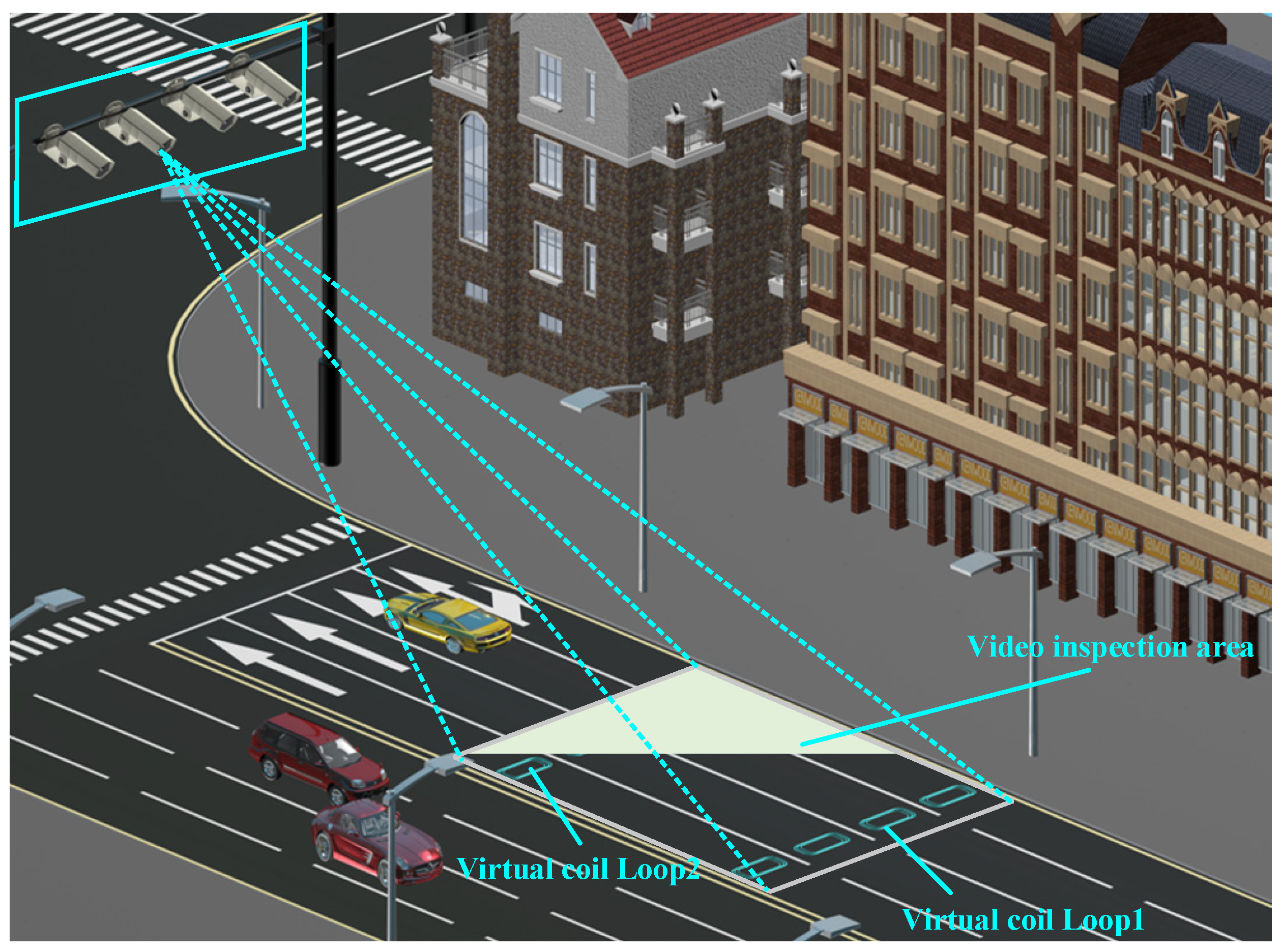
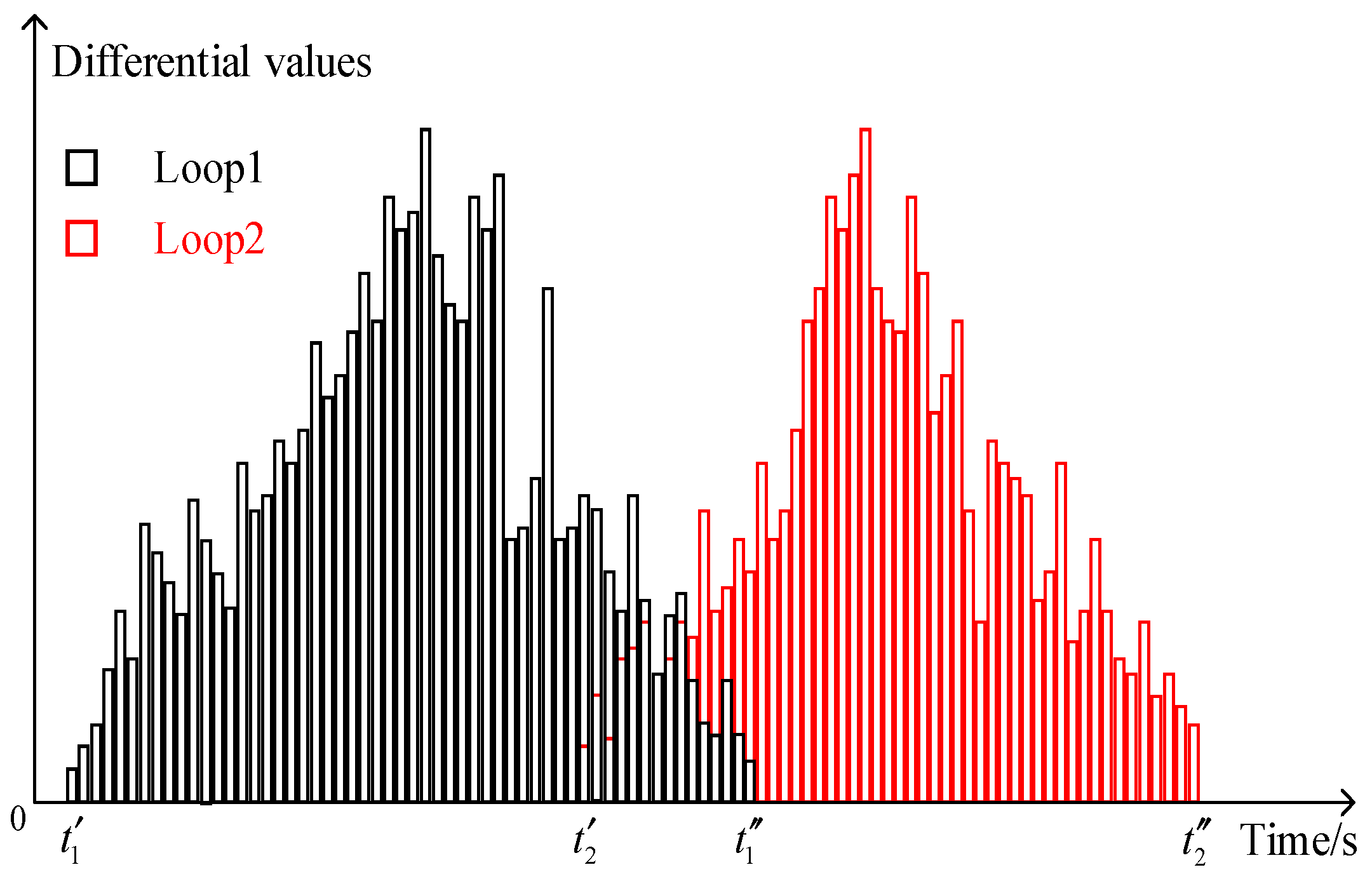
2.1.1. Vehicle Inspection
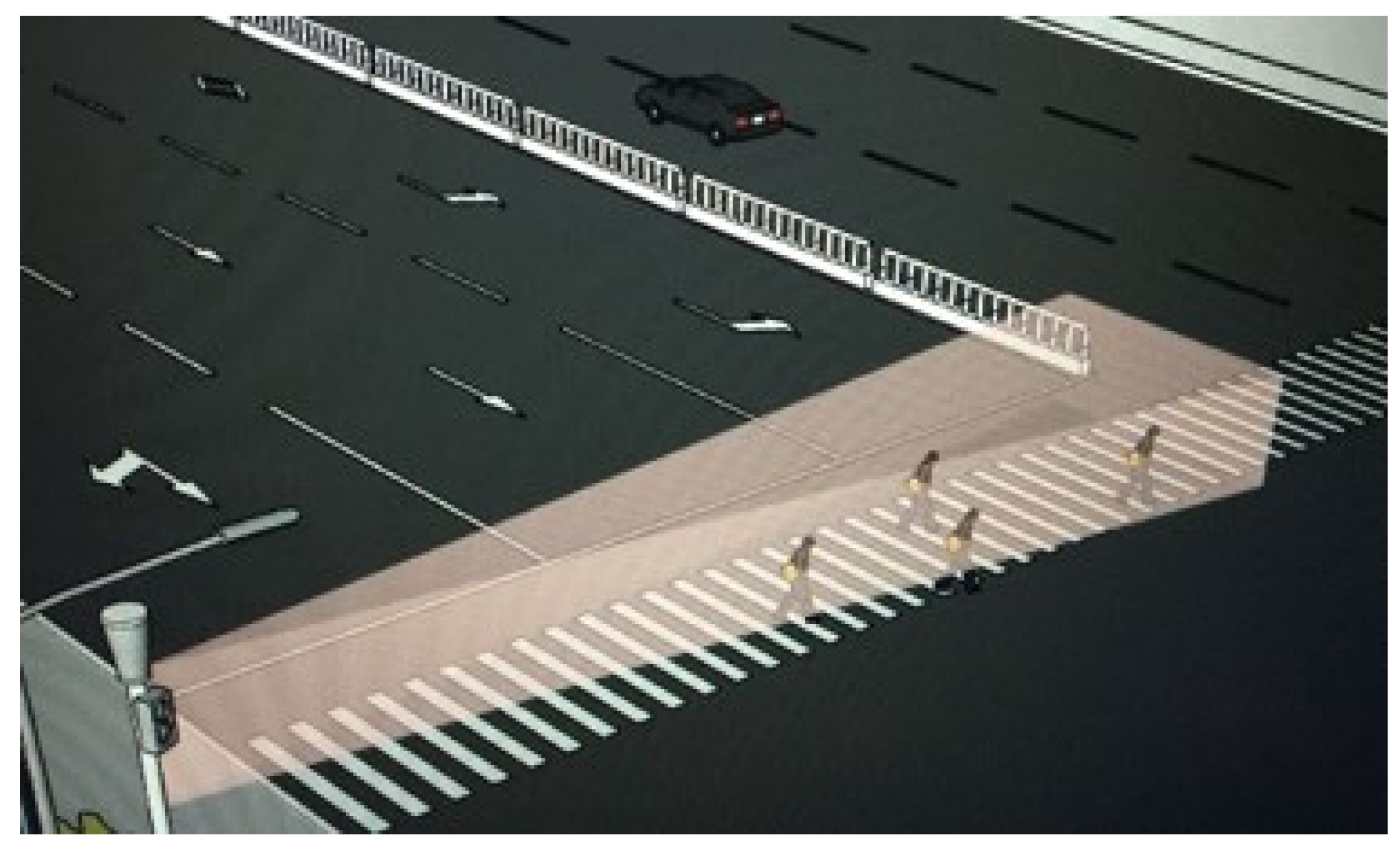
2.1.2. Pedestrian Detection
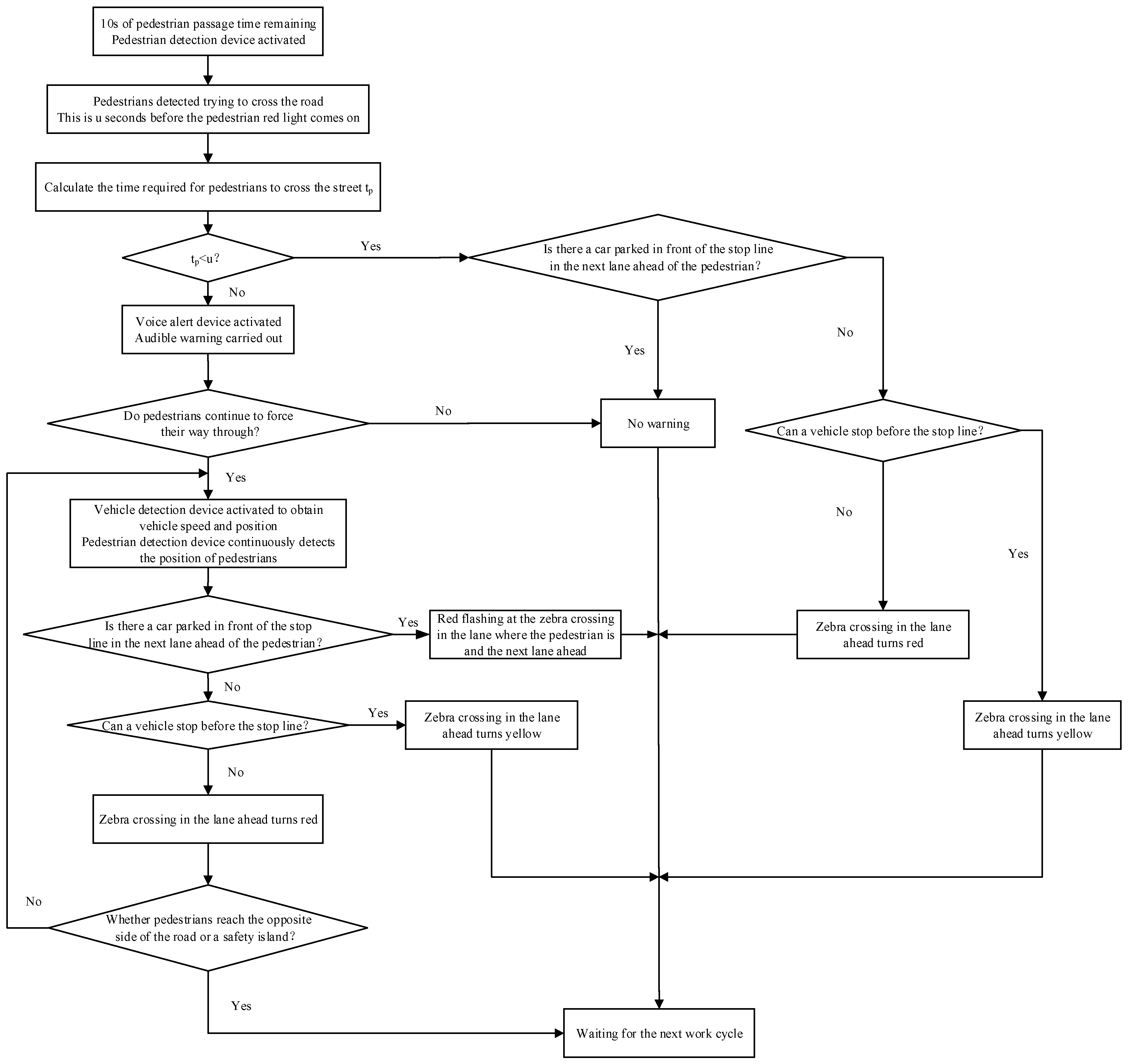
2.2. Control Module
- (1)
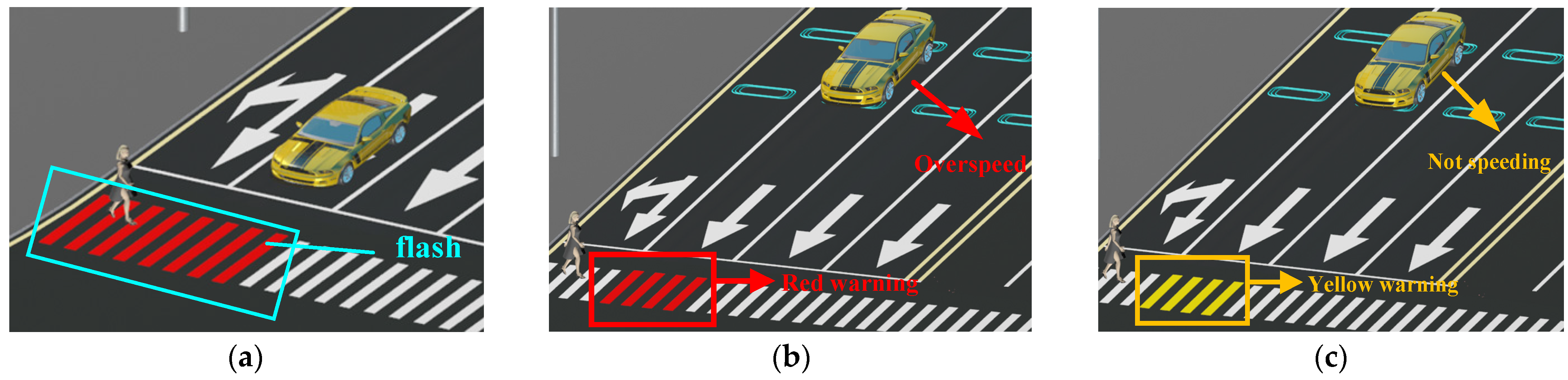
- Case 1. If there is a vehicle stopped, the red light of the zebra crossing in front of the lane where the pedestrian is located and the next lane ahead is controlled to flash (see Figure 5a), thus, preventing the vehicle driver from starting due to inattention [28] or negligent observation when the signal is switched, and causing a traffic accident;
- (2)
- Case 2. If no vehicle is currently stopped and there is a vehicle approaching above a safe speed, the red warning of the crosswalk in front of the next lane ahead is controlled (see Figure 5b), thus, warning vehicles and pedestrians of the impending danger;
- (3)
- Case 3. If no vehicle is currently stopped and a vehicle not exceeding the safe speed is approaching, the yellow warning of the zebra crossing in front of the next lane ahead is controlled (see Figure 5c), thus, warning drivers and pedestrians to pass when it is judged safe to do so.
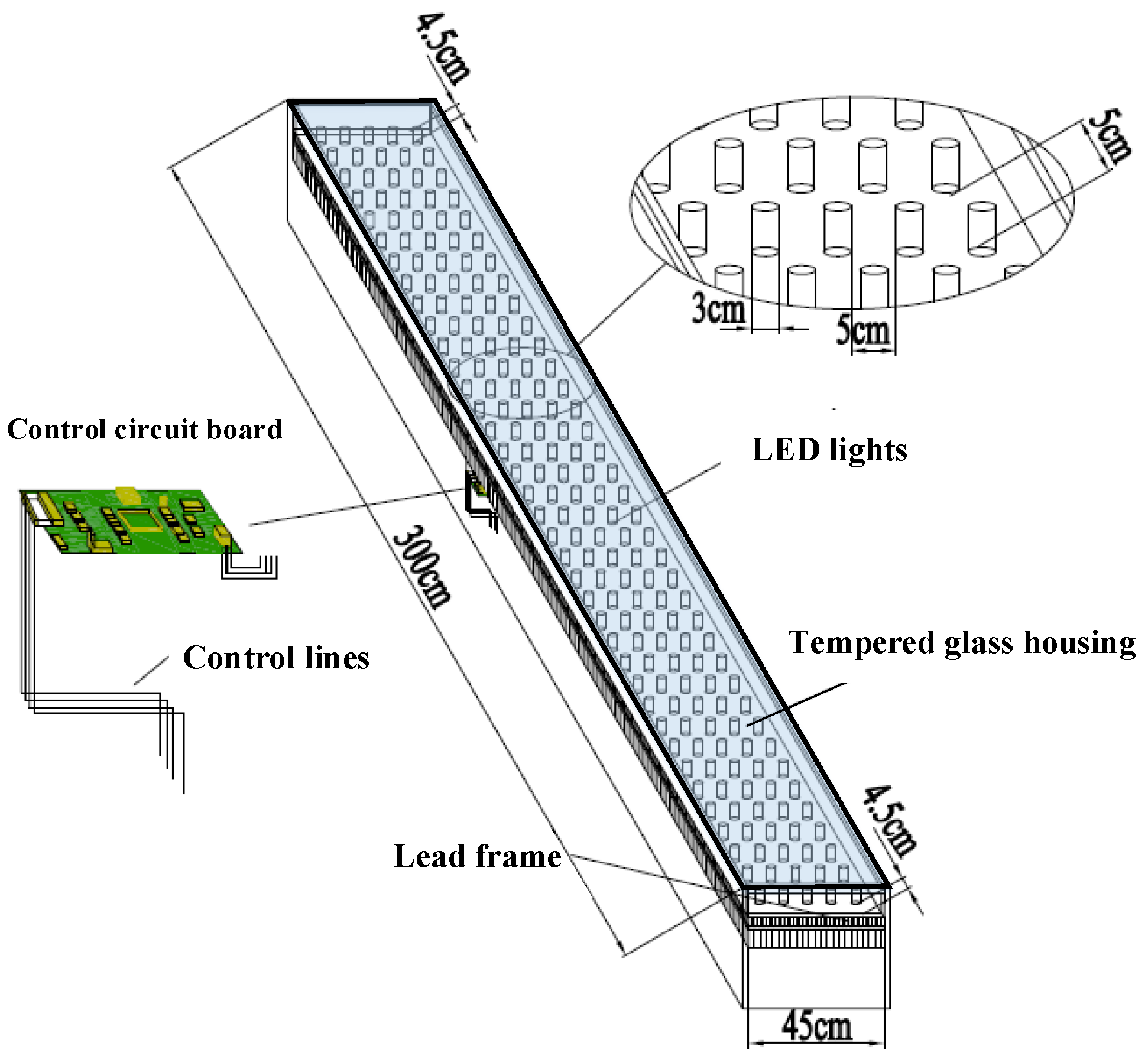
2.3. Warning Module
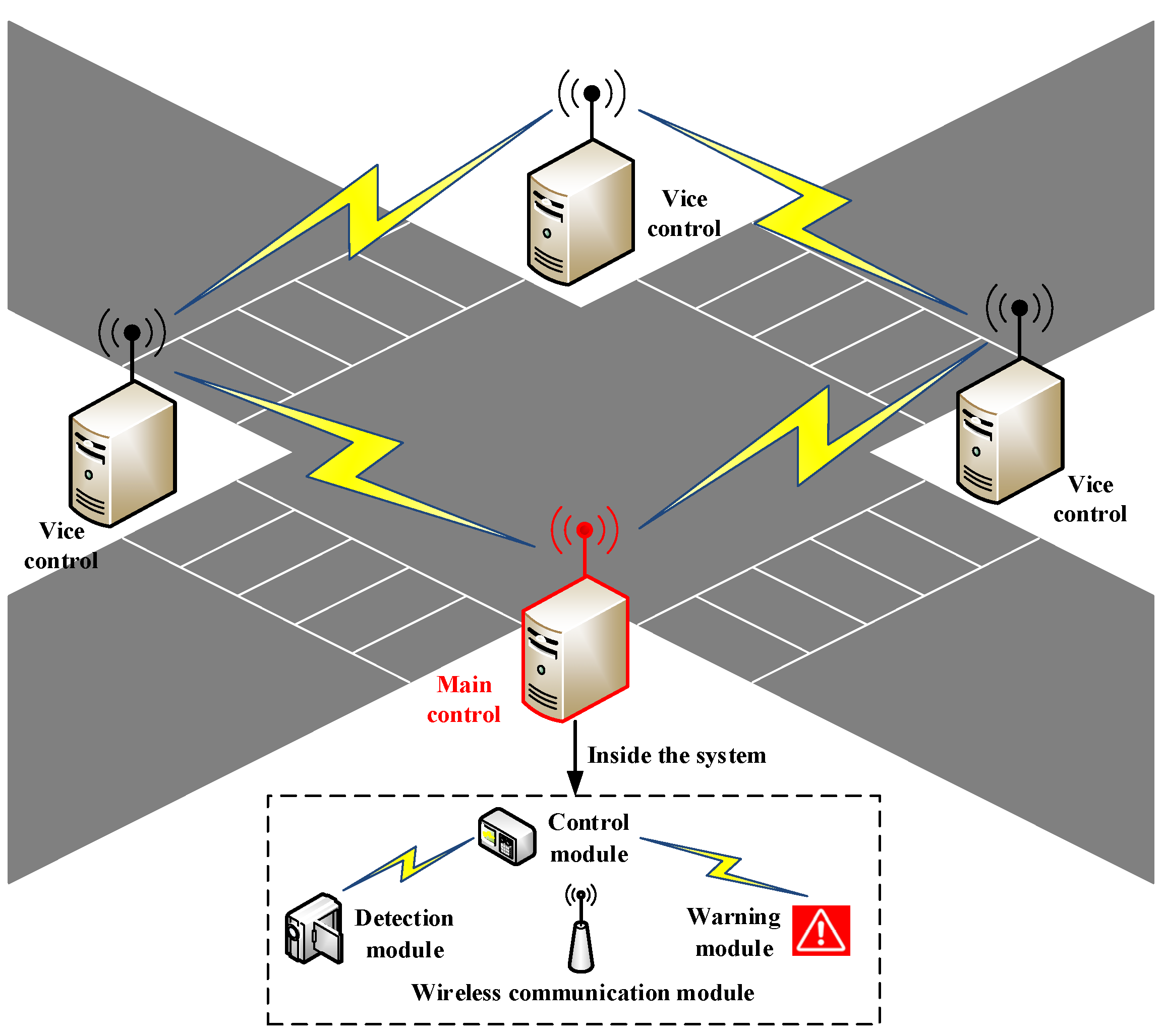
2.4. Wireless Communication Module
3. Vehicle Safety Braking Distance Model Considering Human–Vehicle Characteristics
3.1. Vehicle Minimum Safe Braking Distance Model Improvement
3.2. Vehicle Minimum Safe Braking Distance Model Improvement
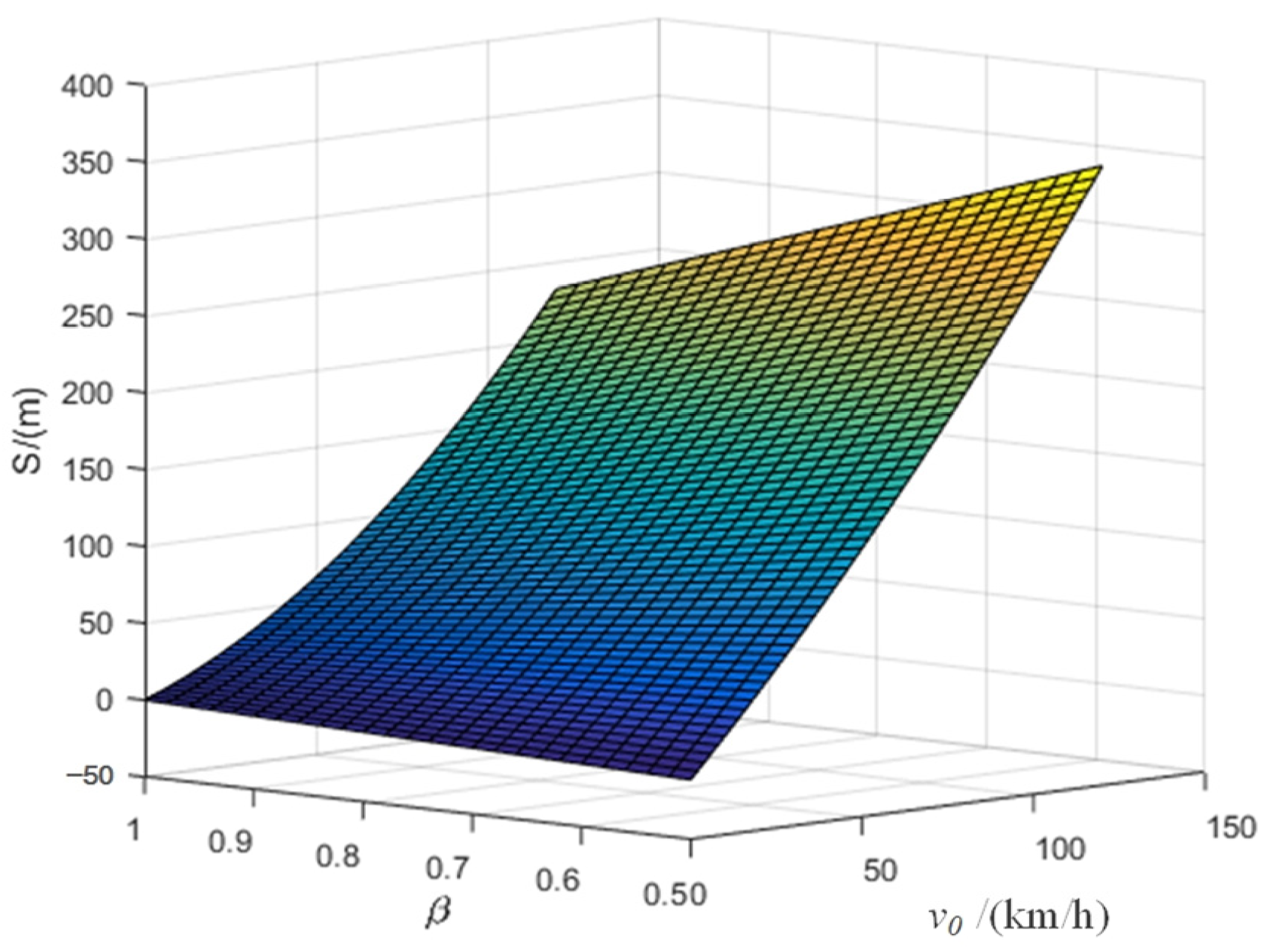
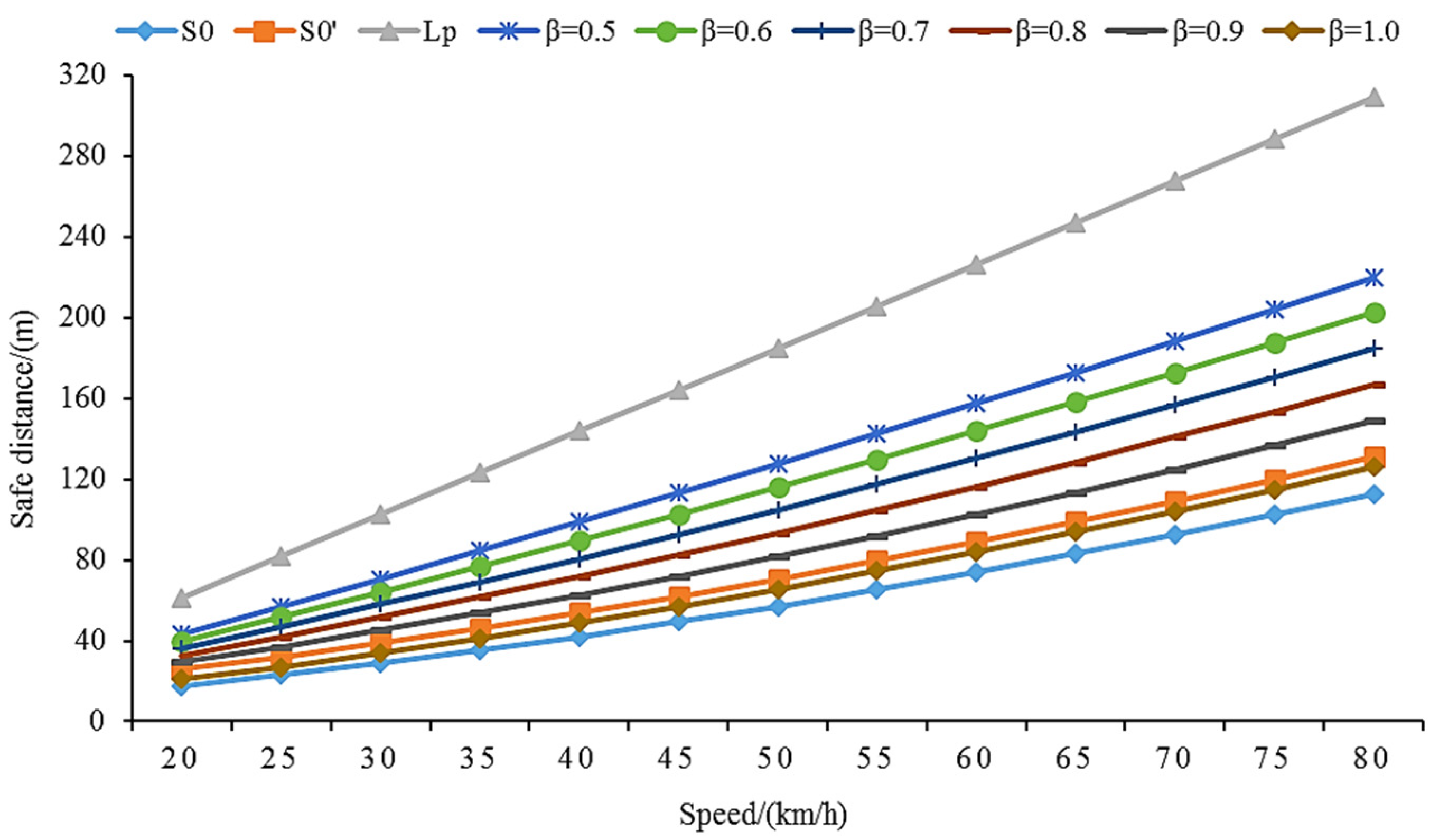
3.3. Modelling of Safe Braking Distances considering Human and Vehicle Characteristics
4. Comparative Model Analysis
5. Conclusions
- (1)
- The designed system detects the position and speed of pedestrians and vehicles in real-time, discriminates between pedestrian and vehicle conflicts with reference to the situation, and runs different warning schemes for different situations. Warning for pedestrians through voice prompting stakes, and two-way warning for pedestrians and vehicles through intelligent zebra crossings with the onset of red, red flashing, yellow lights can effectively reduce conflicts between pedestrians and vehicles and avoid traffic accidents;
- (2)
- The proposed model incorporates considerations of pedestrian psychological safety distances and the impact on vehicle models based on an improved vehicle stopping sight distance model, resulting in further improvements in vehicle braking safety while reducing the psychological impact of the braking process on pedestrians.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Qian, H.B. The Research on the Influence of Intersection Transition Signal to Driver’s Psychology and Traffic Safety. Ph.D. Thesis, Tongji University, Shanghai, China, 2009. [Google Scholar]
- Koh, P.P.; Wong, Y.D.; Chandrasekar, P. Safety evaluation of pedestrian behaviour and violations at signalised pedestrian crossings. Saf. Sci. 2014, 70, 143–152. [Google Scholar] [CrossRef]
- Yin, Y.; Ma, S.Q. A study of traffic characteristics of pedestrian crossing the street and countermeasure. Technol. Econ. Areas Commun. 2013, 15, 18–22+26. [Google Scholar]
- Zhai, L.G.; Ding, J.Y.; Zhang, J.G. Characteristic analysis of pedestrian’s crossing streets and self-protection countermeasures. J. Liaoning Police Acad. 2004, 4, 61–63. [Google Scholar]
- Sugimoto, C.; Nakamura, Y. Provision of information support by pedestrian-to-vehicle communication system. In Proceedings of the 2008 8th International Conference on ITS Telecommunications, Phuket, Thailand, 24 October 2008; IEEE: Piscataway, NJ, USA, 2009. [Google Scholar]
- Keller, C.G.; Dang, T.; Fritz, H.; Joos, A.; Rabe, C.; Gavrila, D.M. Active Pedestrian Safety by Automatic Braking and Evasive Steering. IEEE Trans. Intell. Transp. Syst. 2011, 12, 1292–1304. [Google Scholar] [CrossRef]
- Ogawa, T.; Sakai, H.; Suzuki, Y.; Takagi, K.; Morikawa, K. Pedestrian detection and tracking using in-vehicle lidar for automotive application. In Proceedings of the 2011 IEEE Intelligent Vehicles Symposium (IV), Baden, Germany, 5–9 June 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 734–739. [Google Scholar]
- Doric, I.; Frison, A.-K.; Wintersberger, P.; Riener, A.; Wittmann, S.; Zimmermann, M.; Brandmeier, T. A Novel Approach for Researching Crossing Behavior and Risk Acceptance. In AutomotiveUI’16 Adjunct: Adjunct, Proceedings of the 8th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Ann Arbor, MI, USA, 24–26 October 2016; ACM: New York City, NY, USA, 2016; pp. 39–44. [Google Scholar]
- Jin, M.S.; Lee, S.K. Pedestrians and drivers behaviour change by installation of crossing safety assistant system. J. Korea Inst. Intell. Transp. Syst. 2016, 15, 85–93. [Google Scholar] [CrossRef]
- Francisco, G.; Vitor, G.; Paulo, L.; Costa, P.; Mendes, S.; Rabadão, C. Prototype to Increase Crosswalk Safety By Integrating Computer Vision with ITS-G5 Technologies. INF 2020, 11, 503. [Google Scholar]
- Patella, S.M.; Sportiello, S.; Carrese, S.; Bella, F.; Asdrubali, F. The Effect of a LED Lighting Crosswalk on Pedestrian Safety: Some Experimental Results. Safety 2020, 6, 20. [Google Scholar] [CrossRef]
- Islam, M.; Rahman, M.; Chowdhury, M.; Comert, G.; Sood, E.D.; Apon, A. Vision-based Personal Safety Messages (PSMs) Generation for Connected Vehicles. IEEE Trans. Veh. Technol. 2020, 69, 9402–9416. [Google Scholar] [CrossRef]
- Sowmiya, R.; Sundary, N.N. Pedestrian crossing carriage using ultrasonic sensor. J. Phys. Conf. Ser. 2021, 1717, 012031. [Google Scholar] [CrossRef]
- He, Y.M.; Shang, Q.P.; Wang, S. Traffic safety warning system of urban pedestrian crossing the street. Technol. Econ. Areas Commun. 2018, 20, 9–12. [Google Scholar]
- Zou, R.L.; Wang, C.E.; Qiu, W.; Zhang, J.X.; Jiang, W. The pedestrian crossing safety induction control system based on intelligent. Mod. Transp. Technol. 2018, 15, 62–66. [Google Scholar]
- Yang, X.D.; Liu, X.; Xie, S.Y.; Li, G.H.; Gao, Z.X.; Lei, G.Q.; Li, H.T. Safety device for pedestrian crossing based on signal detection. Shanxi Archit. 2019, 45, 92–93. [Google Scholar]
- Lu, Y.; Wang, L. Pedestrian crossing system of the road segement on the basis of infrared therrnal imaging technology. Shanxi Archit. 2019, 5, 133–134. [Google Scholar]
- Chen, Z.; Cai, M.M.; Gao, J.; Qu, D.Y.; Li, H.Y. Zebra crossing safety warning system under vehicle-road coordination environment. J. Qingdao Univ. Technol. 2019, 40, 106–112. [Google Scholar]
- Yang, Y.; Chen, F. Pedestrian crossing safety device based on signal detection. Electron. Test. 2020, 4, 31–33. [Google Scholar]
- Hua, W.T.; Wang, C.L.; Liu, C.H.; Xu, Z.P. Design of pedestrian crossing facility induction system based on AR technology. Commun. Sci. Technol. Heilongjiang 2020, 43, 39–41. [Google Scholar]
- Li, Y.J. The study and application of pedestrian civilization propriety alert system. J. Liaoning Police Coll. 2020, 22, 75–80. [Google Scholar]
- Yin, C.Z. Traffic Parameters Detection Based on Video Virtual-Loop Sensors. Master’s Thesis, Tsinghua University, Beijing, China, 2002. [Google Scholar]
- Qu, D.Y.; Han, L.W.; Lin, L.; Hei, K.X.; Zhao, Z.X. Design of vehicle-road cooperative assistant decision system for active safety at intersections. J. Highw. Transp. Res. Dev. 2021, 38, 100–108, 122. [Google Scholar] [CrossRef]
- Xu, J.L. Road Survey and Design, 4th ed.; China Communications Press: Beijing, China, 2016; pp. 130–139. [Google Scholar]
- Hou, Z.; Zhang, H.C. Design of vehicle pedestrian collision warning system based on millimeter wave radar. Sci. Technol. Innov. 2021, 14, 126–129. [Google Scholar]
- Huang, M. Research and Implementation of Target Location Technology For Smart Lamp-Post. Master’s Thesis, University of Electronic Science and Technology of China, Chengdu, China, 2021. [Google Scholar]
- Guo, P.; Xiang, H.; Wu, S.; Pu, T.; Chen, D. Design of intelligent pedestrian and vehicle guidance system for zebra crossing based on millimeter wave radar. J. Phys. Conf. Ser. 2020, 1646, 012125. [Google Scholar] [CrossRef]
- Xue, Z.C.; Gong, W.H.; Yang, B.; Xu, Q.P.; Zhang, L.P.; Shi, L.; Fan, Y.H.; Ren, Y.Y. Attention allocation features of drivers under common driving behaviors. J. Univ. Jinan (Sci. Technol.) 2018, 32, 469–475. [Google Scholar]
- Rista, E.; Fitzpatrick, K. Comparison of LED-embedded pedestrian crossing signs with rectangular rapid flashing beacons and pedestrian hybrid beacons. Transp. Res. Record 2020, 2674, 856–866. [Google Scholar] [CrossRef]
- Wang, Y.J.; Deng, X.W. Application of high strength cover glass surface treatment technology (AG). Glass 2021, 48, 31–33. [Google Scholar]
- Pan, F.Q.; Zhang, L.X.; Yang, J.S. Traffic Safety Engineering, 1st ed.; China Machine Press: Beijing, China, 2018; pp. 175–184. [Google Scholar]
- Lu, B.C.; Diao, S.S.; He, X.Y.; Shu, Q. Pedestrian crossing safety measures based on psychological field strength model. Sci. Technol. Eng. 2019, 19, 351–356. [Google Scholar]
- Liu, X.M.; Shi, J.J.; Chen, Y.Y. Traffic Behavior, 1st ed.; Science Press: Beijing, China, 2017; pp. 133–145. [Google Scholar]
- Yuan, Q.; Yan, N.F.; Hao, W. Research on pedestrian risk assessment and early warning algorithm based on psychological safety distance. China J. Highw. Transp. 2022, 35, 109–118. [Google Scholar]


Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qu, D.; Li, H.; Liu, H.; Wang, S.; Zhang, K. Crosswalk Safety Warning System for Pedestrians to Cross the Street Intelligently. Sustainability 2022, 14, 10223. https://doi.org/10.3390/su141610223
Qu D, Li H, Liu H, Wang S, Zhang K. Crosswalk Safety Warning System for Pedestrians to Cross the Street Intelligently. Sustainability. 2022; 14(16):10223. https://doi.org/10.3390/su141610223
Chicago/Turabian StyleQu, Dayi, Haiyang Li, Haomin Liu, Shaojie Wang, and Kekun Zhang. 2022. "Crosswalk Safety Warning System for Pedestrians to Cross the Street Intelligently" Sustainability 14, no. 16: 10223. https://doi.org/10.3390/su141610223
APA StyleQu, D., Li, H., Liu, H., Wang, S., & Zhang, K. (2022). Crosswalk Safety Warning System for Pedestrians to Cross the Street Intelligently. Sustainability, 14(16), 10223. https://doi.org/10.3390/su141610223