
EyesOnTraps: AI-Powered Mobile-Based Solution for Pest Monitoring in Viticulture

 , , , , , , , , , , , and
, , , , , , , , , , , and
Abstract
:1. Introduction
2. Related Work
3. Methodology
3.1. User Research
3.2. Image Quality & Adequacy Assessment
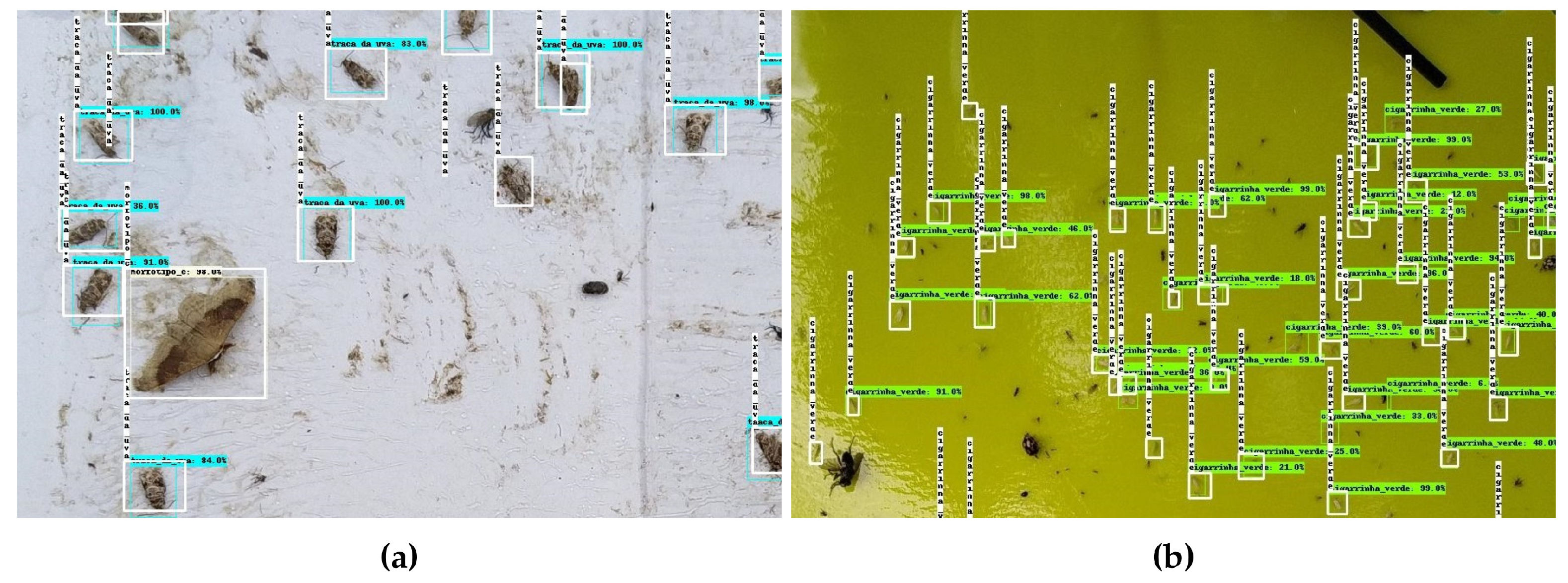
3.3. Automated Insects Detection
3.4. Ambient Temperature Monitoring
4. Results and Discussion
4.1. Requirements and System Architecture Definition
4.1.1. Requirements
4.1.2. System Architecture
4.2. Image Acquisition Module
4.3. Insects Detection Module
4.4. Sensorization Module
4.5. Mobile Application
Usability Tests
4.6. Online Image Annotator
4.7. Web Portal
5. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AI | Artificial Intelligence |
| ML | Machine Learning |
| CT | Chromotropic Traps |
| DT | Delta Traps |
| BLE | Bluetooth Low Energy |
| PCB | Printed Circuit Board |
| RTC | Real-Time Clock |
| DD | Degrees-Day |
| AAR | Android Archive |
| PSSUQ | Post-Study System Usability Questionnaire |
References
- European Union. Directive 2009/128/EC of the European Parliament and of the Council of 21 October 2009 establishing a framework for Community action to achieve the sustainable use of pesticides. Off. J. Eur. Union 2009, 309, 71–86. Available online: https://eur-lex.europa.eu/legal-content/EN/ALL/?uri=celex%3A32009L0128 (accessed on 19 June 2022).
- Semios. Available online: https://semios.com/ (accessed on 19 June 2022).
- TrapView. Available online: https://www.trapview.com/ (accessed on 19 June 2022).
- DTN Smart Trap. Available online: https://www.dtn.com/agriculture/producer/dtn-smart-trap/ (accessed on 19 June 2022).
- FieldClimate. Available online: https://metos.at/fieldclimate/ (accessed on 19 June 2022).
- SnapTrap. Available online: https://snaptrap.com.au/ (accessed on 19 June 2022).
- Agrio. Available online: https://agrio.app (accessed on 19 June 2022).
- RapidAIM. Available online: https://rapidaim.io/ (accessed on 19 June 2022).
- CapTrap. Available online: https://www.sival-innovation.com/en/captrap-service/ (accessed on 19 June 2022).
- TarvosView. Available online: https://tarvos.ag/tarvos-view/ (accessed on 19 June 2022).
- Faria, P.; Nogueira, T.; Ferreira, A.; Carlos, C.; Rosado, L. AI-Powered Mobile Image Acquisition of Vineyard Insect Traps with Automatic Quality and Adequacy Assessment. Agronomy 2021, 11, 731. [Google Scholar] [CrossRef]
- Gonçalves, J.; Silva, E.; Faria, P.; Nogueira, T.; Ferreira, A.; Carlos, C.; Rosado, L. Edge-compatible Deep Learning Models for Detection of Pest Outbreaks in Viticulture. IEEE Access 2022, submitted.
- Rosa, A.F.; Martins, A.I.; Costa, V.; Queirós, A.; Silva, A.; Rocha, N.P. European Portuguese validation of the Post-Study System Usability Questionnaire (PSSUQ). In Proceedings of the 2015 10th Iberian Conference on Information Systems and Technologies (CISTI), Aveiro, Portugal, 17–20 June 2015; pp. 1–5. [Google Scholar] [CrossRef]
- Carlos, C.; Gonçalves, F.; Oliveira, I.; Torres, L. Is a biofix necessary for predicting the flight phenology of Lobesia botrana in Douro Demarcated Region vineyards? Crop Prot. 2018, 110, 57–64. [Google Scholar] [CrossRef]
- Kallisto. Available online: https://docs.sensry.net/Overview/Kallisto/ (accessed on 21 June 2022).
- Humidity Sensor BME280—Bosch Sensortec. Available online: https://www.bosch-sensortec.com/products/environmental-sensors/humidity-sensors-bme280/ (accessed on 21 June 2022).
- TFA Dostmann Protective Cover for Outdoor Transmitter 98.1114. Available online: https://www.tfa-dostmann.de/en/product/protective-cover-for-outdoor-transmitter-98-1114/ (accessed on 21 June 2022).
- Baillod, M.; Baggiolini, M. Les stades repères de la vigne. Rev. Suisse Vitic. Arboric. Hortic. 1993, 25, 7–9. [Google Scholar]
- Sauro, J.; Lewis, J.R. Quantifying the User Experience: Practical Statistics for User Research; Morgan Kaufmann: Burlington, MA, USA, 2016. [Google Scholar]
- SIGP—Geodouro Agricultural Management Software. Available online: https://www.sigp.pt (accessed on 23 June 2022).
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Semios [2] | TrapView [3] | SmartTrap [4] | FieldClimate [5] | SnapTrap [6] | Agrio [7] | TarvosView [10] | RapidAIM [8] | CapTrap [9] | |
|---|---|---|---|---|---|---|---|---|---|
| Image acquisition and visualization | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | |||
| Automatically identify and count insects | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | |||
| Review and edit automated results | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | |||
| Pest forecasting | ✓ | ✓ | ✓ | ||||||
| Requires proprietary instrumented trap | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | |
| Pest detection via mobile-acquired images | ✓ | ||||||||
| Trap georeferencing | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | |||
| Provide infestation / pest alerts | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | |||
| Communication with temperature sensors | ✓ | ✓ | ✓ | ✓ | |||||
| Allow offline usage | ✓ |
| Predicted | |||||||
|---|---|---|---|---|---|---|---|
| Class | Green Leafhopper | Morphotype C | “Flavescence Dorée” Leafhopper | European Grapevine Moth | Tomato Moth | Only Groundtruth (FN) | |
| Green Leafhopper | 378 | 0 | 0 | 0 | 0 | 138 | |
| Morphotype C | 0 | 31 | 0 | 0 | 0 | 13 | |
| Groundtruth | “Flavescence Dorée” Leafhopper | 0 | 0 | 0 | 0 | 10 | 16 |
| European Grapevine Moth | 0 | 2 | 0 | 1013 | 3 | 200 | |
| Tomato Moth | 0 | 0 | 0 | 16 | 44 | 13 | |
| Only Detection (FP) | 293 | 13 | 0 | 171 | 23 | - | |
| Tasks in the Winegrower’s Journey | Requirements (Opportunities for Improvement) |
|---|---|
| Travel to the trap | Traps georeferencing |
| Trap monitoring and maintenance | Reminders to monitor the trap, |
| change the pheromone or change the glue base | |
| Manual identification and counting of insects | Automatic identification and counting of insects |
| Field notebook (on paper) | Digitization of the field notebook |
| Identification of the phenological state | Recording of phenological status (with image capture) |
| Track temperature near traps | Recording of temperature history near traps |
| Application of preventive phytosanitary treatments | Send warnings and recommendations to promote |
| the effective management of phytosanitary treatments |
| Average Error C | Mean Error Deviation C | Mean Absolute Error C | Absolute Mean Error Deviation C | ||
|---|---|---|---|---|---|
| Near Weather Station | EoT Sensor 1 | −0.31 | 1.61 | 1.38 | 0.89 |
| EoT Sensor 2 | −0.22 | 1.05 | 0.81 | 0.71 | |
| EoT Sensor 3 | −0.53 | 1.20 | 1.03 | 0.80 | |
| Average | −0.38 | 1.29 | 1.07 | 0.8 | |
| Distant Weather Station | EoT Sensor 4 | −0.87 | 3.11 | 2.64 | 1.86 |
| EoT Sensor 5 | −1.56 | 2.5 | 2.26 | 1.89 | |
| EoT Sensor 6 | −0.91 | 3.63 | 3.33 | 1.71 | |
| Average | −1.11 | 3.08 | 2.74 | 1.82 | |
| Scale | Result | Mean |
|---|---|---|
| Overall | 1.60 | 2.82 |
| System Usefulness (SYSUSE) | 1.57 | 2.80 |
| Information Quality (INFOQUAL) | 1.56 | 3.02 |
| Interface Quality (INTERQUAL) | 1.74 | 2.49 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rosado, L.; Faria, P.; Gonçalves, J.; Silva, E.; Vasconcelos, A.; Braga, C.; Oliveira, J.; Gomes, R.; Barbosa, T.; Ribeiro, D.; et al. EyesOnTraps: AI-Powered Mobile-Based Solution for Pest Monitoring in Viticulture. Sustainability 2022, 14, 9729. https://doi.org/10.3390/su14159729
Rosado L, Faria P, Gonçalves J, Silva E, Vasconcelos A, Braga C, Oliveira J, Gomes R, Barbosa T, Ribeiro D, et al. EyesOnTraps: AI-Powered Mobile-Based Solution for Pest Monitoring in Viticulture. Sustainability. 2022; 14(15):9729. https://doi.org/10.3390/su14159729
Chicago/Turabian StyleRosado, Luís, Pedro Faria, João Gonçalves, Eduardo Silva, Ana Vasconcelos, Cristiana Braga, João Oliveira, Rafael Gomes, Telmo Barbosa, David Ribeiro, and et al. 2022. "EyesOnTraps: AI-Powered Mobile-Based Solution for Pest Monitoring in Viticulture" Sustainability 14, no. 15: 9729. https://doi.org/10.3390/su14159729
APA StyleRosado, L., Faria, P., Gonçalves, J., Silva, E., Vasconcelos, A., Braga, C., Oliveira, J., Gomes, R., Barbosa, T., Ribeiro, D., Nogueira, T., Ferreira, A., & Carlos, C. (2022). EyesOnTraps: AI-Powered Mobile-Based Solution for Pest Monitoring in Viticulture. Sustainability, 14(15), 9729. https://doi.org/10.3390/su14159729