
Optimal Environmental Policy in a Dynamic Transboundary Pollution Game: Emission Standards, Taxes, and Permit Trading


Abstract
:1. Introduction
2. Literature Review
3. Parameter Description, Assumptions and Methods
3.1. Parameter Description and Assumptions
3.2. Methods
3.2.1. Differential Game
3.2.2. Stackelberg Game
4. Dynamic Games of Environmental Policies
4.1. Emission Standards (Scenario S)
4.2. Emission Taxes (Scenario T)
4.3. Tradable Emission Permits (Scenario P)
4.4. Comparing Emission Standards, Taxes, and Permit Trading
- (1)
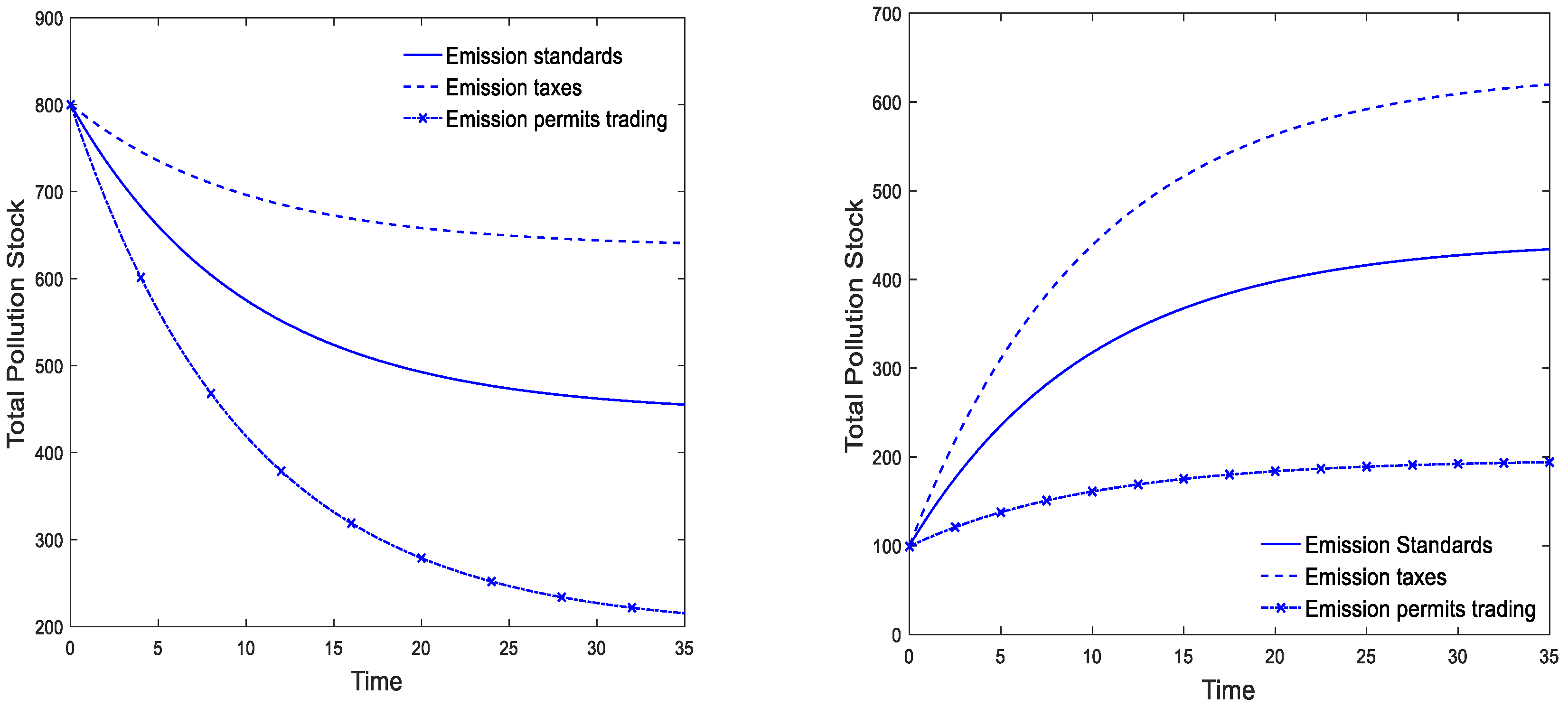
- Difference in the trajectory and steady state of the pollution stock
- (2)
- Difference in social welfare under three policies
5. Analysis of the Equilibrium Results
5.1. Equilibrium Trajectories
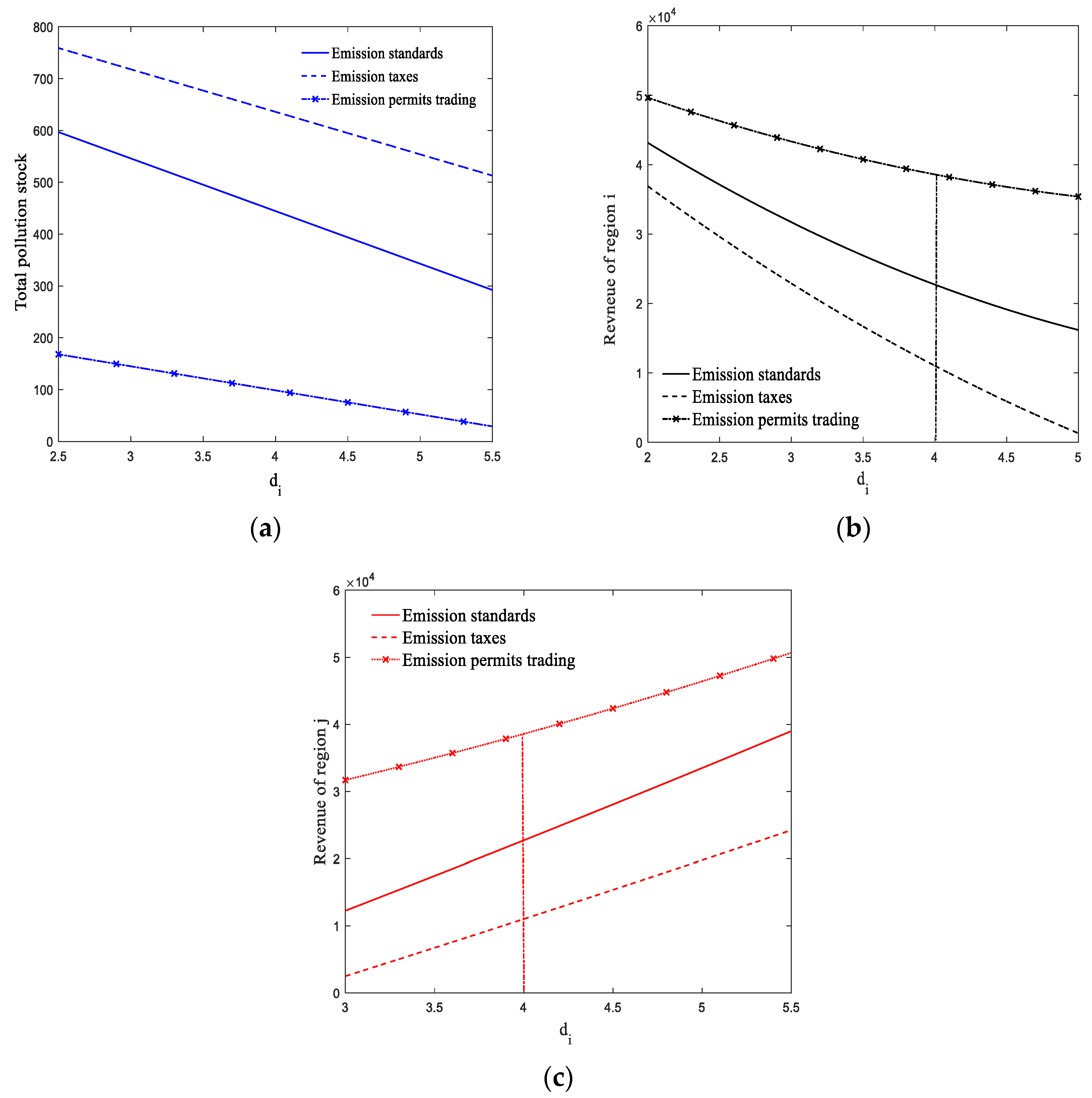
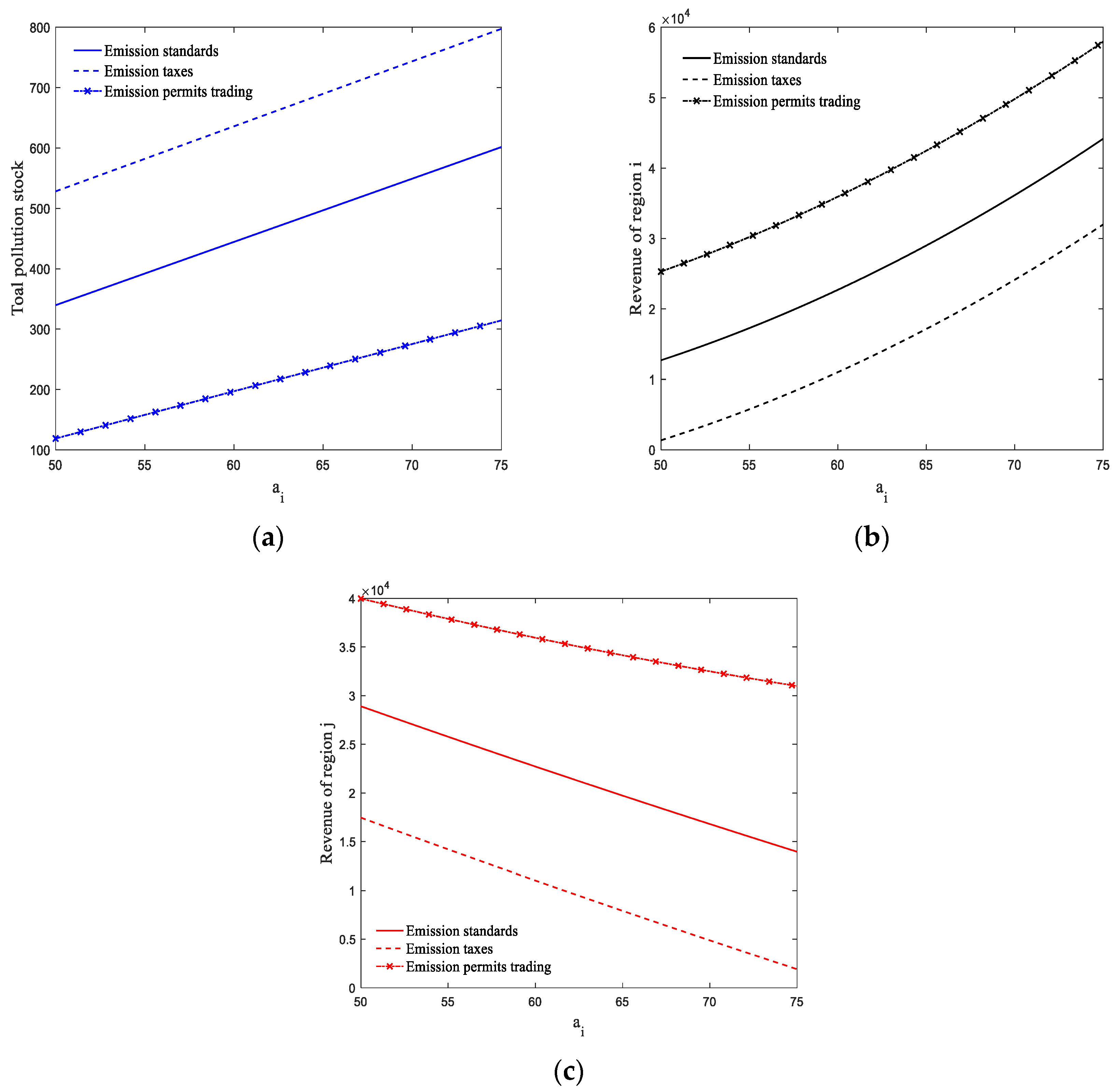
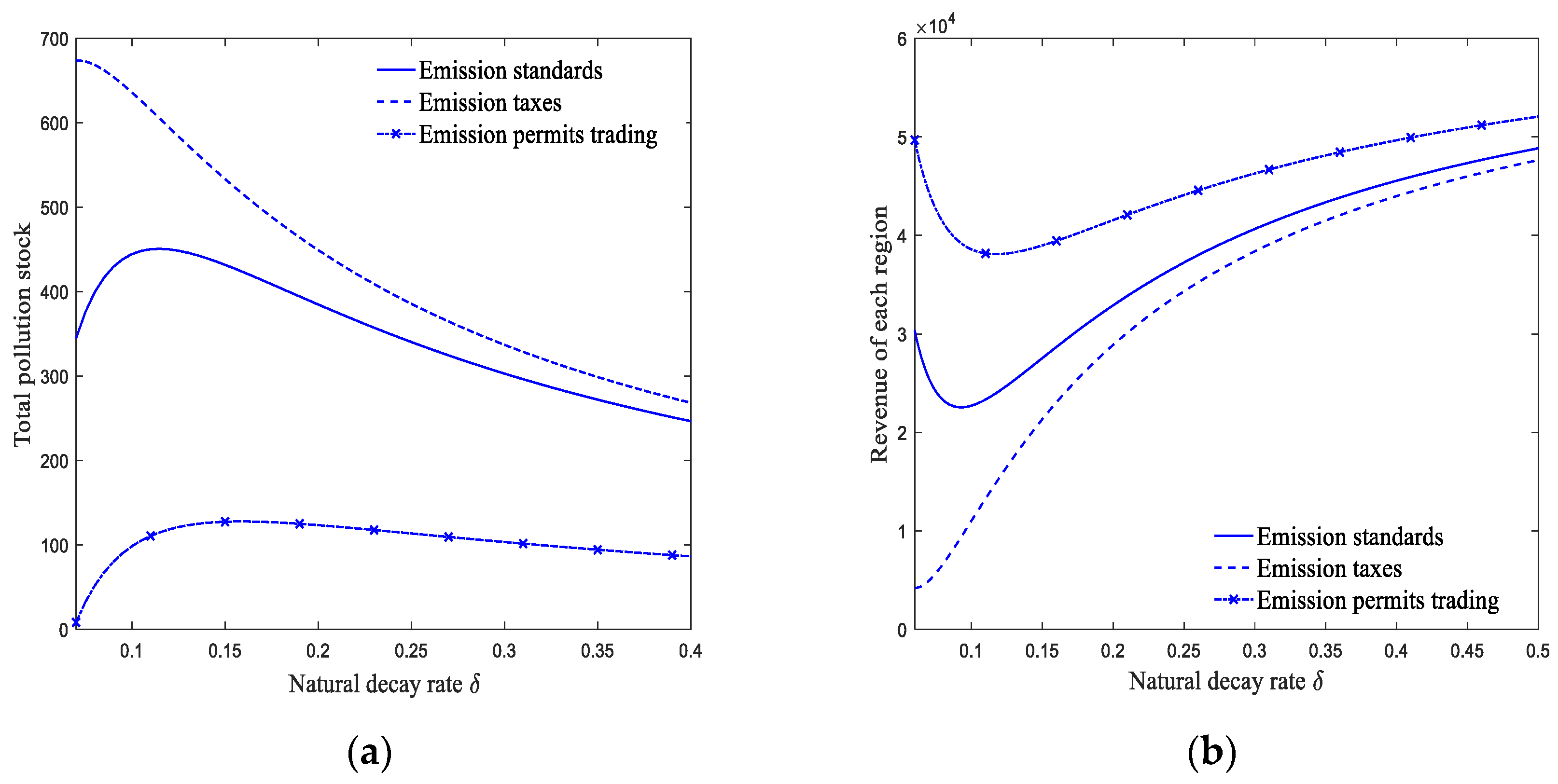
5.2. Steady-State Equilibrium Results
6. Conclusions and Applications
6.1. Conclusions
6.2. Limitations and Prospects
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. For Proposition 1
Appendix B. For Proposition 2
Appendix C. For Proposition 3
References
- Wendling, Z.A.; Emerson, J.W.; Esty, D.C.; Levy, M.A.; de Sherbinin, A. The 2018 Environmental Performance Index Report; Yale Center for Environmental Law & Policy: New Haven, CT, USA, 2018. [Google Scholar]
- Weitzman, M.L. Prices vs. quantities. Rev. Econ. Stud. 1974, 41, 477–491. [Google Scholar] [CrossRef]
- Newell, R.G.; Pizer, W.A. Regulating stock externalities under uncertainty. J. Environ. Econ. Manag. 2003, 45, 416–432. [Google Scholar] [CrossRef] [Green Version]
- Weber, T.A.; Neuhoff, K. Carbon markets and technological innovation. J. Environ. Econ. Manag. 2010, 60, 115–132. [Google Scholar] [CrossRef] [Green Version]
- Arguedas, C.; Cabo, F.; Martín-Herrán, G. Optimal pollution standards and non-compliance in a dynamic framework. Environ. Resour. Econ. 2017, 68, 537–567. [Google Scholar] [CrossRef] [Green Version]
- Martín-Herrán, G.; Rubio, S.J. Optimal environmental policy for a polluting monopoly with abatement costs: Taxes versus standards. Environ. Model. Assess. 2018, 23, 671–689. [Google Scholar] [CrossRef]
- Jørgensen, S.; Martín-Herrán, G.; Zaccour, G. Dynamic games in the economics and management of pollution. Environ. Model. Assess. 2010, 15, 433–467. [Google Scholar] [CrossRef]
- Zhang, Q.; Jiang, X.; Tong, D.; Davis, S.J.; Zhao, H.; Geng, G.; Feng, T.; Zheng, B.; Lu, Z.; Streets, D.G.; et al. Transboundary health impacts of transported global air pollution and international trade. Nature 2017, 543, 705–709. [Google Scholar] [CrossRef] [Green Version]
- Ambec, S.; Coria, J. Prices vs quantities with multiple pollutants. J. Environ. Econ. Manag. 2013, 66, 123–140. [Google Scholar] [CrossRef] [Green Version]
- Requate, T. Pollution control in a cournot duopoly via taxes or permits. J. Econ. 1993, 58, 255–291. [Google Scholar] [CrossRef]
- Kato, K. Emission quota versus emission tax in a mixed duopoly. Environ. Econ. Policy Stud. 2011, 13, 43–63. [Google Scholar] [CrossRef]
- Wirl, F. Taxes versus permits as incentive for the intertemporal supply of a clean technology by a monopoly. Resour. Energy Econ. 2014, 36, 248–269. [Google Scholar] [CrossRef]
- Huang, X.; He, P.; Zhang, W. A cooperative differential game of transboundary industrial pollution between two regions. J. Clean Prod. 2016, 120, 43–52. [Google Scholar] [CrossRef]
- Van Long, N. A Survey of Dynamic Games in Economics; World Scientific: Singapore, 2010; pp. 71–104. [Google Scholar]
- Benchekroun, H.; Van Long, N. Efficiency inducing taxation for polluting oligopolists. J. Public Econ. 1998, 70, 325–342. [Google Scholar] [CrossRef] [Green Version]
- Storrøsten, H.B. Prices versus quantities: Technology choice, uncertainty and welfare. Environ. Resour. Econ. 2014, 59, 275–293. [Google Scholar] [CrossRef]
- Masoudi, N.; Zaccour, G. Emissions control policies under uncertainty and rational learning in a linear-state dynamic model. Automatica 2014, 50, 719–726. [Google Scholar] [CrossRef]
- Masoudi, N. Environmental policies in the presence of more than one externality and of strategic firms. J. Environ. Plan. Manag. 2022, 65, 168–185. [Google Scholar] [CrossRef]
- Garcia, A.; Leal, M.; Lee, S.H. Optimal policy mix in an endogenous timing with a consumer-friendly public firm. Econ. Bull. 2018, 38, 1438–1445. [Google Scholar]
- Feenstra, T.; Kort, P.M.; de Zeeuw, A. Environmental policy instruments in an international duopoly with feedback in-vestment strategies. J. Econ. Dyn. Control. 2001, 25, 1665–1687. [Google Scholar] [CrossRef]
- Hoel, M.; Karp, L. Taxes versus quotas for a stock pollutant. Resour. Energy Econ. 2002, 24, 367–384. [Google Scholar] [CrossRef] [Green Version]
- Lee, S.H.; Park, S.H. Tradable emission permits regulations: The role of product differentiation. Int. J. Bus. Econ. 2005, 4, 249–261. [Google Scholar]
- Garcia, A.; Leal, M.; Lee, S.H. Time-inconsistent environmental policies with a consumer-friendly firm: Tradable permits versus emission tax. Int. Rev. Econ. Financ. 2018, 58, 523–537. [Google Scholar] [CrossRef] [Green Version]
- Feichtinger, G.; Lambertini, L.; Leitmann, G.; Wrzaczek, S. R&D for green technologies in a dynamic oligopoly: Schumpeter, arrow and inverted-U’s. Eur. J. Oper. Res. 2016, 249, 1131–1138. [Google Scholar]
- Moner-Colonques, R.; Rubio, S. The timing of environmental policy in a duopolistic market. Econ. Agrar. Recur. Nat. 2015, 15, 11–40. [Google Scholar] [CrossRef] [Green Version]
- Ulph, A. The choice of environmental policy instruments and strategic international trade. In Conflicts and Cooperation in Managing Environmental Resources; Springer: Berlin/Heidelberg, Germany, 1992; pp. 111–132. [Google Scholar]
- Lai, Y.; Hu, C. Trade agreements, domestic environmental regulation, and transboundary pollution. Resour. Energy Econ. 2008, 30, 209–228. [Google Scholar] [CrossRef]
- Glachant, M.; Ing, J.; Nicolai, J.P. The incentives for north-south transfer of climate-mitigation technologies with trade in polluting goods. Environ. Resour. Econ. 2017, 66, 435–456. [Google Scholar] [CrossRef] [Green Version]
- Dockner, E.J.; Jorgensen, S.; Van Long, N.; Sorger, G. Differential Games in Economics and Management Science; Cambridge University Press: Cambridge, UK, 2000; pp. 37–80. [Google Scholar]
- Dockner, E.J.; Van Long, N. International pollution control: Cooperative versus noncooperative strategies. J. Environ. Econ. Manag. 1993, 25, 13–29. [Google Scholar] [CrossRef] [Green Version]
- Jørgensen, S.; Zaccour, G. Time consistent side payments in a dynamic game of downstream pollution. J. Econ. Dyn. Control. 2001, 25, 1973–1987. [Google Scholar] [CrossRef]
- Jørgensen, S.; Martín-Herrán, G.; Zaccour, G. Agreeability and time consistency in linear-state differential games. J. Optim. Theory Appl. 2003, 119, 49–63. [Google Scholar] [CrossRef]
- Breton, M.; Sbragia, L.; Zaccour, G. A Dynamic model for international environmental agreements. Environ. Resour. Econ. 2010, 45, 25–48. [Google Scholar] [CrossRef]
- Li, S. A Differential game of transboundary industrial pollution with emission permits trading. J. Optim. Theory Appl. 2014, 163, 642–659. [Google Scholar] [CrossRef]
- Bertinelli, L.; Camacho, C.; Zou, B. Carbon capture and storage and transboundary pollution: A differential game approach. Eur. J. Oper. Res. 2014, 237, 721–728. [Google Scholar] [CrossRef]
- El Ouardighi, F.; Kogan, K.; Gnecco, G.; Sanguineti, M. Transboundary pollution control and environmental absorption efficiency management. Ann. Oper. Res. 2020, 287, 653–681. [Google Scholar] [CrossRef]
- Yeung, D.W.; Petrosyan, L.A. A Cooperative stochastic differential game of transboundary industrial pollution. Automatica 2008, 44, 1532–1544. [Google Scholar] [CrossRef]
- Xu, H.; Tan, D. Optimal abatement technology licensing in a dynamic transboundary pollution game: Fixed fee versus royalty. Comput. Econ. 2019; in press. [Google Scholar] [CrossRef]
- Marsiglio, S.; Masoudi, N. Transboundary pollution control and competitiveness concerns in a two-country differential game. Environ. Model. Assess. 2022, 27, 105–118. [Google Scholar] [CrossRef]
- Huiquan, L.; Genlong, G. Dynamic decision of transboundary basin pollution under emission permits and pollution abatement. Physica A 2019, 532, 121869. [Google Scholar]
- de Frutos, J.; Gatón, V.; López-Pérez, P.M.; Martín-Herrán, G. Investment in cleaner technologies in a transboundary pollution dynamic game: A numerical investigation. Dyn. Games Appl. 2022; in press. [Google Scholar] [CrossRef]
- de Frutos, J.; Martín-Herrán, G. Spatial vs. non-spatial transboundary pollution control in a class of cooperative and non-cooperative dynamic games. Eur. J. Oper. Res. 2019, 276, 379–394. [Google Scholar] [CrossRef] [Green Version]
- Yanase, A. Dynamic games of environmental policy in a global economy: Taxes versus quotas. Rev. Int. Econ. 2007, 15, 592–611. [Google Scholar] [CrossRef]
- Yanase, A. Global environment and dynamic games of environmental policy in an international duopoly. J. Econ. 2009, 97, 121–140. [Google Scholar] [CrossRef]
- Yanase, A.; Kamei, K. Dynamic game of international pollution control with general oligopolistic equilibrium: Neary meets dockner and long. Dyn. Games Appl. 2022; in press. [Google Scholar] [CrossRef]
- Menezes, F.M.; Pereira, J. Emissions abatement R&D: Dynamic competition in supply schedules. J. Public. Econ. Theory. 2017, 19, 841–859. [Google Scholar]
- Benchekroun, H.; Chaudhuri, A.R. Transboundary pollution and clean technologies. Resour. Energy Econ. 2014, 36, 601–619. [Google Scholar] [CrossRef] [Green Version]
- Martín-Herrán, G.; Rubio, S.J. On coincidence of feedback and global stackelberg equilibria in a class of differential games. Eur. J. Oper. Res. 2021, 293, 761–772. [Google Scholar] [CrossRef]
- Cheng, K.F.; Tsai, C.S.; Hsu, C.C.; Lin, S.-C.; Tsai, T.-C.; Lee, J.-Y. Emission tax and compensation subsidy with cross-industry pollution. Sustainability 2019, 11, 998. [Google Scholar] [CrossRef] [Green Version]
- Helm, D. The european framework for energy and climate policies. Energy Policy 2014, 64, 29–35. [Google Scholar] [CrossRef]
- Conrad, K. Taxes and subsidies for pollution-intensive industries as trade policy. J. Environ. Econ. Manag. 1993, 25, 121–135. [Google Scholar] [CrossRef]
- Konisky, D.M. Regulatory competition and environmental enforcement: Is there a race to the bottom? Am. J. Polit. Sci. 2007, 51, 853–872. [Google Scholar] [CrossRef]
- Lambertini, L.; Poyago-Theotoky, J.; Tampieri, A. Cournot competition and “green” innovation: An inverted-u relationship. Energy Econ. 2017, 68, 116–123. [Google Scholar] [CrossRef] [Green Version]
- Burtraw, D.; McCormack, K. Consignment auctions of free emissions allowances. Energy Policy 2017, 107, 337–344. [Google Scholar] [CrossRef]
- Khezr, P.; MacKenzie, I.A. Consignment auctions. J. Environ. Econ. Manag. 2018, 87, 42–51. [Google Scholar] [CrossRef] [Green Version]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notation | Description |
|---|---|
| The positive constant parameter measuring the reservation price, | |
| The market size of each region | |
| The quantity of the product purchased by consumers in each region, | |
| The cost coefficient of emission reduction, | |
| The natural decay rate | |
| The discount rate | |
| The damage parameter, | |
| The initial level of the pollution stock, | |
| The product price at time | |
| The output of the firm at time | |
| The pollution abatement level at time | |
| The pollution stock in the two regions at time | |
| The instantaneous profit of the firm at time | |
| The emission standard set by the government in each region at time | |
| The emission tax rate at time | |
| The emission quota of the firm assigned by the government in each region at time | |
| The value function of each region, |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, H.; Luo, M. Optimal Environmental Policy in a Dynamic Transboundary Pollution Game: Emission Standards, Taxes, and Permit Trading. Sustainability 2022, 14, 9028. https://doi.org/10.3390/su14159028
Xu H, Luo M. Optimal Environmental Policy in a Dynamic Transboundary Pollution Game: Emission Standards, Taxes, and Permit Trading. Sustainability. 2022; 14(15):9028. https://doi.org/10.3390/su14159028
Chicago/Turabian StyleXu, Hao, and Ming Luo. 2022. "Optimal Environmental Policy in a Dynamic Transboundary Pollution Game: Emission Standards, Taxes, and Permit Trading" Sustainability 14, no. 15: 9028. https://doi.org/10.3390/su14159028
APA StyleXu, H., & Luo, M. (2022). Optimal Environmental Policy in a Dynamic Transboundary Pollution Game: Emission Standards, Taxes, and Permit Trading. Sustainability, 14(15), 9028. https://doi.org/10.3390/su14159028