
Development of Digital Twin for Intelligent Maintenance of Civil Infrastructure



Abstract
:1. Introduction
- inability of computerised maintenance management systems or, in other words, facility management systems to automatically schedule maintenance work orders
- difficulty in accessing accurate information for the facility management staff.
- Data exchange: One of the costly shortcomings of the existing processes is data exchange during inspection planning, implementation and reporting, as most likely each of these phases is conducted by a different party (i.e., planners, inspectors, maintainers). In existing practices, data transfer from inspections, planning and maintenance needs to be either manually entered or converted (to a compatible format), which carries the risk of errors and data loss.
- Interoperability: This issue is an important function in data management [5]. Currently produced digital data are in different formats and not necessarily compatible between different software, which makes their lifespan limited and with little guarantee that the data will make it to later stages of asset utilisation. According to Smith and Domer [3], the model-based application outputs’ interoperability challenges costs the U.S. facility owners USD 15.8 billion as a result of lost efficiency. Of this amount more than 65% belongs to the operation and maintenance stage.
- Data management: 80% of the time spent on managing a facility is to look for appropriate and useful information. Previous research has revealed that new technologies such as Building Information Modelling.
- (BIM) enables a reduction of 98% in the time spent to update the database while managing facilities [3].
- Data loss along asset lifecycle phases as a result of (1) incoherent naming conventions (2) lack of a universal standard for the required asset information (3) insufficient categorisation of data in different model-based applications (4) ill synchronisation of information (5) lack of a structured model for capturing existing assets and their details [4].
- Being labour intensive and therefore not cost effective.
- Reactive (firefighting/corrective) also known as failure-based.
- Preventative—also known as time-based. DT approach (further explained in Section 4) can be utilised in preventative strategies to predict the state of an asset and therefore reduce the number of unnecessary preventative maintenance activities providing longer time intervals between them.
- Condition-based (based on asset condition)—also known as diagnosis-based maintenance (efficient detection of anomalies in the existing condition of an asset and fast data processing is made possible thanks to the developed state of technologies such as IOT and cloud computing [9]). Artificial intelligence algorithms can enhance this maintenance approach in diagnosing and acquiring detailed status data [10].
- Predictive (prognosis)—this approach can use a data driven (data driven techniques (clustering, neural networks, Bayesian networks, support vector machine (SVM) and principal components analysis (PCA)) are data-oriented, which can be obtained with appropriate sensor deployment) or model driven (the model driven technique uses mathematical methods (analytical, physical, or numerical models) to describe an asset) technique to predict maintenance.
- Prescriptive (knowledge-based) maintenance—in addition to predicting the status of the asset this approach aims to optimise maintenance via prescribing action to maintain an asset by using historical and real-time data.
2. Advancements in Structural Health Monitoring (SHM) Methods
- BIM—to visualise the infrastructure performance
- sensors—to collect real-time data and
- structural analysis methods—to simulate and study structural performance (e.g., finite element analysis (FEA), which is a simulation method to objectively define and predict the performance of infrastructures)
3. DT and Intelligent Infrastructure Maintenance
- Structural classifications (annotate elements of structure)
- Localising damage from structural inspections over time
- Localising installed sensors
- Contextualising generated data (damages to structural components etc.).
3.1. DT Application in Improving Maintenance Practices
3.2. Roadblocks, Alternatives and Research Questions
- A detailed maintenance procedure to structure the processes
- Data availability, integrity, security, and quality
- Regulatory barriers (regulatory bodies have a timely process in adopting new technologies)
- Reluctance to change traditional methods (making asset owners aware of DT’s benefits is fundamental in gradual incremental deployment of the DT)
- Alternatives to generate required data to address data availability challenges include:
- IoT/industry internet of things (IIoT) technologies
- FEM (generating synthetic data via simulation though defining the scenarios to simulate and generate data is a challenge) and
- BIM as a source of data
- Is DT application for infrastructure SHM using FEM models feasible?
- What are the challenges in terms of interoperability? How to make different software/platforms communicate with each other?
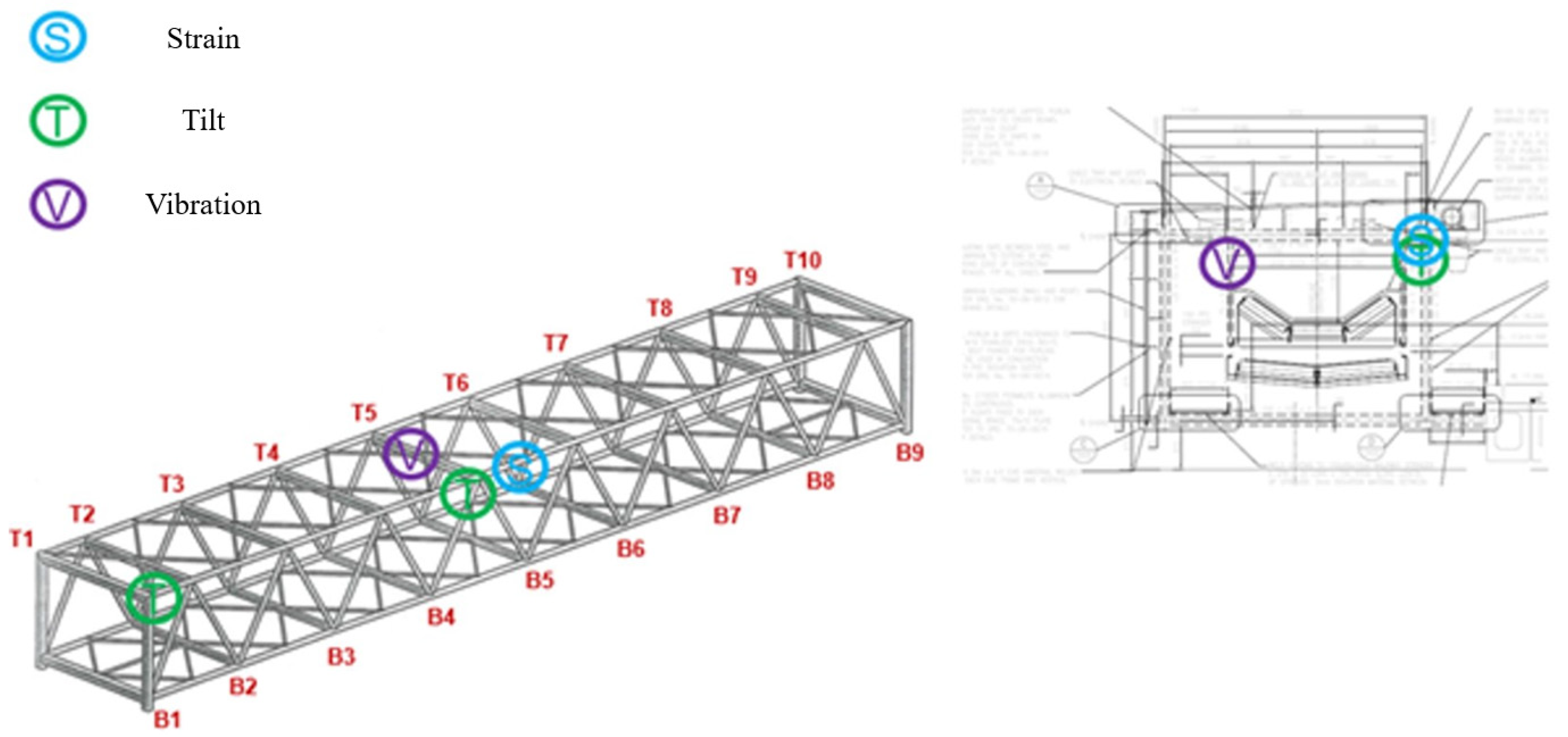
- What sensor configuration is needed to collect the required data? How to determine sensor locations?
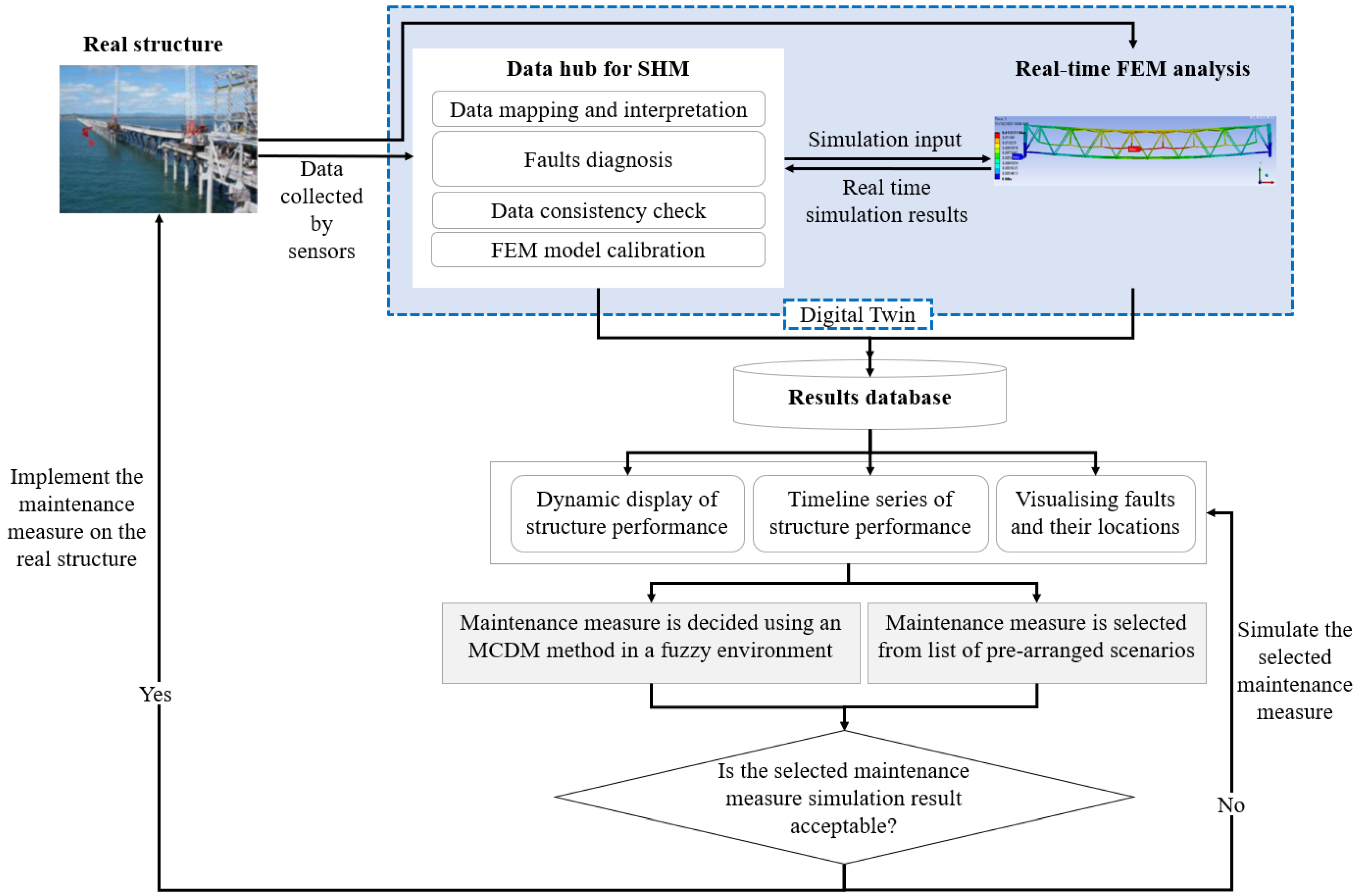
4. Designing DT Architecture for Infrastructure SHM
- State: Current value/condition of either of the entities (physical or virtual objects)
- Metrology: Measuring/gauging state of either of the entities (physical or virtual)
- Twining: As the name implies this is the process of communicating the entities’ state to each other
- Data processing: this is related to analysis and process of the telemetry data from real object collected from sensors
- Realisation: this is after on boarding the result of the data processing in the previous step which results in changing the state of the physical/virtual objects
- Twining rate: is related to the frequency of creating the connection between the two entities
- Physical to virtual and virtual to physical connection: relate to the connection flow direction between the two entities
4.1. Semantic Modelling
4.2. Processing Monitoring Data
4.3. Integration Levels
4.4. DT Architecture Design
- a visualised digital replica containing geometric and semantic data in terms of materials, stresses, and strains
- utilising data spanning along the infrastructure whole life cycle, i.e., planning, design, constructing, operation and maintenance, and disposal
- physical connection (i.e., to monitor existing state in real time)
- ability to inform future projects and maintenance practices through generating valuable informative data from processing real-time data and/or simulating what-if scenarios
- Building appropriate model of an infrastructure (multi-domain, multi-disciplinary)
- Establishing the connection between the infrastructure and its DT to support seamless monitoring
- Integrating different services
- Consolidating data from physical model and its DT and developing data aggregation and interpretation methods/algorithms (key to generating consumable information) and
- Developing maintenance measure decision-making methods
- Which parts/components need to be monitored?
- What domain needs to be measured (e.g., displacement, temperature, deflection etc.)?
- Which sensors (and configuration/arrangement) are adopted to monitor and measure infrastructure responses?
- What are the thresholds for fault warnings? (e.g., the predefined allowable tolerance for the measured strain by a strain gauge before a fault alarm is triggered)
- What is the frequency of data collection and simulation to make the system efficient?
- What analysis processes are needed to drive and interpret the data (modelling and simulation)?
Advantages of the Proposed Architecture Compared to Existing Methods
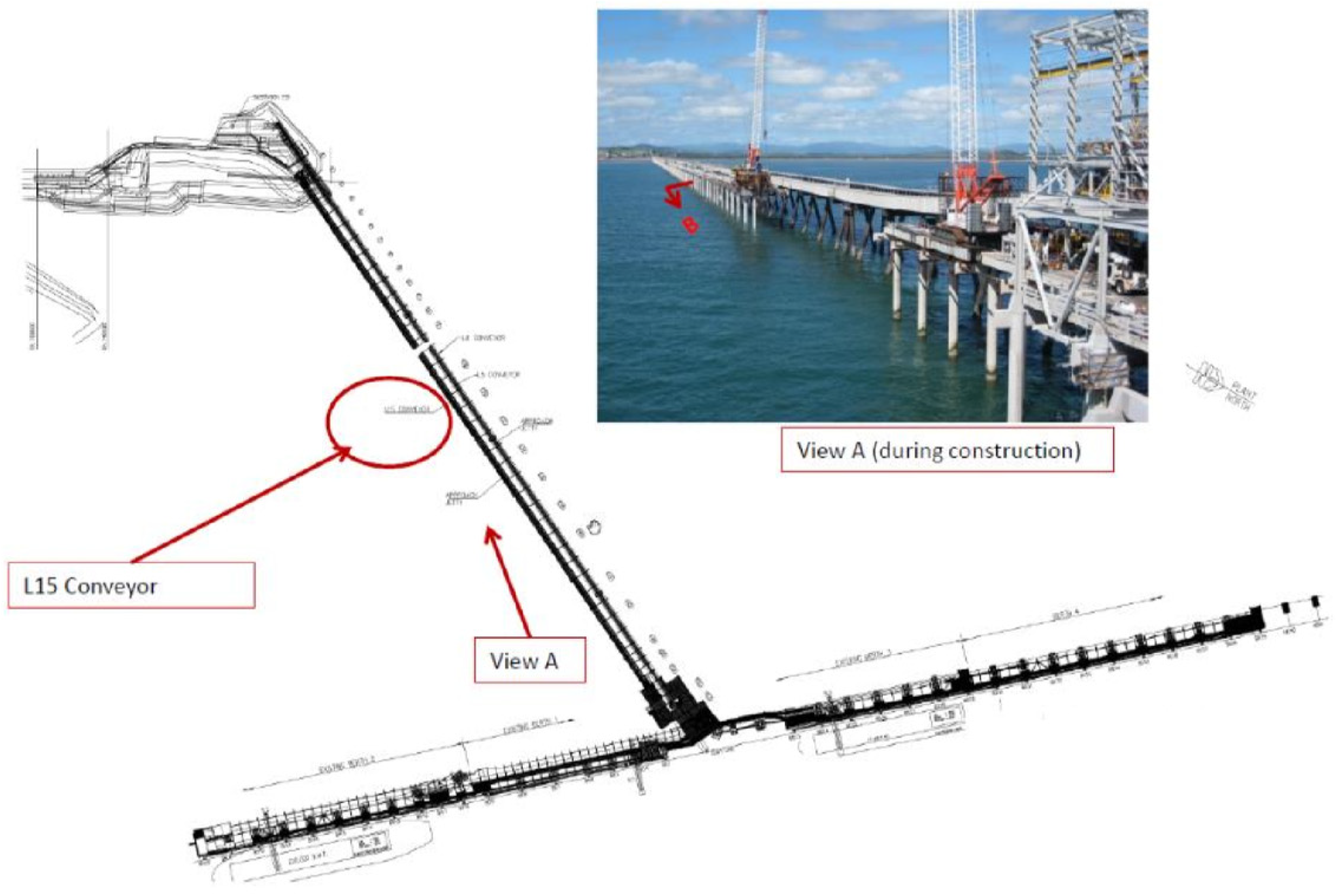
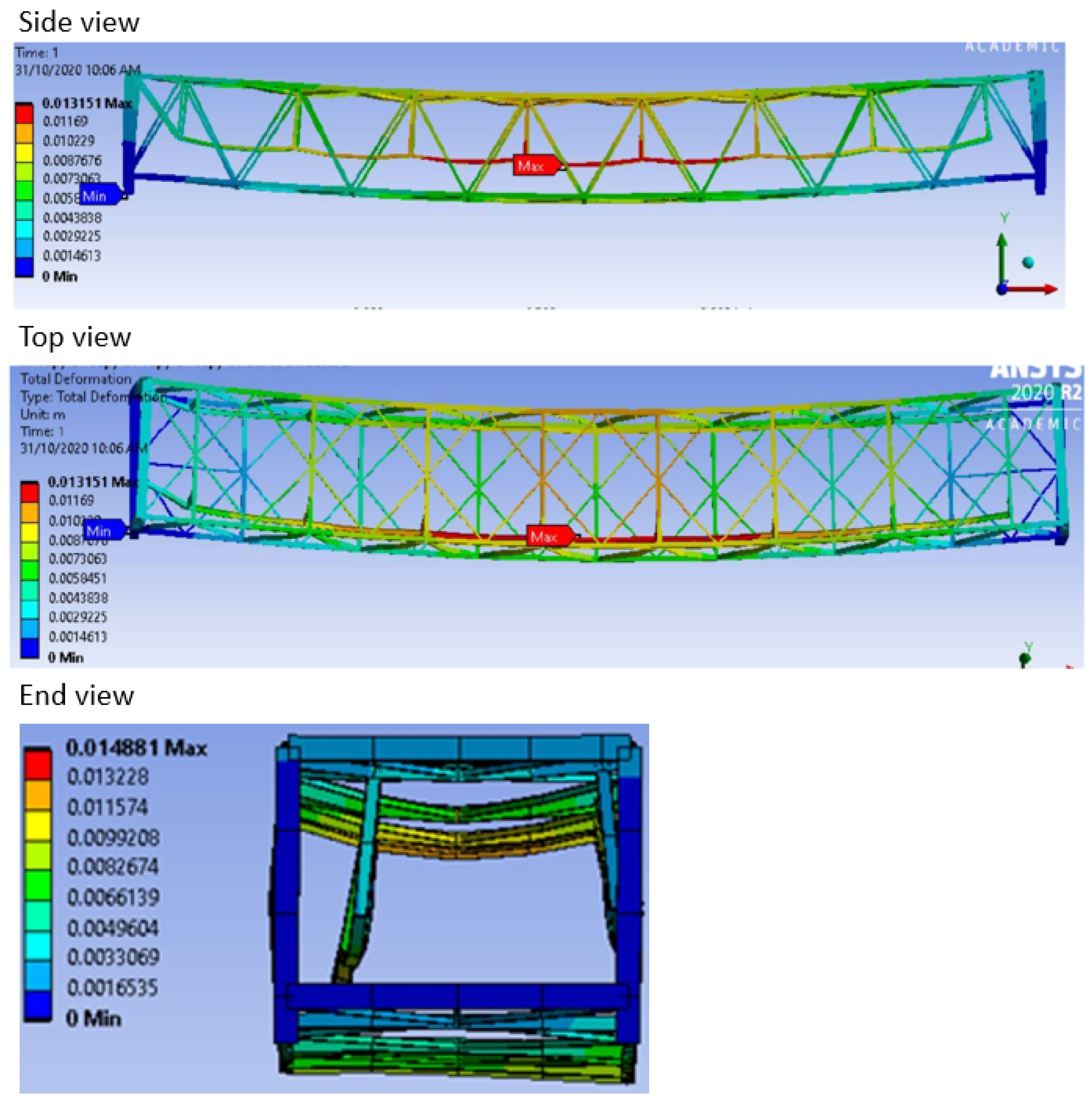
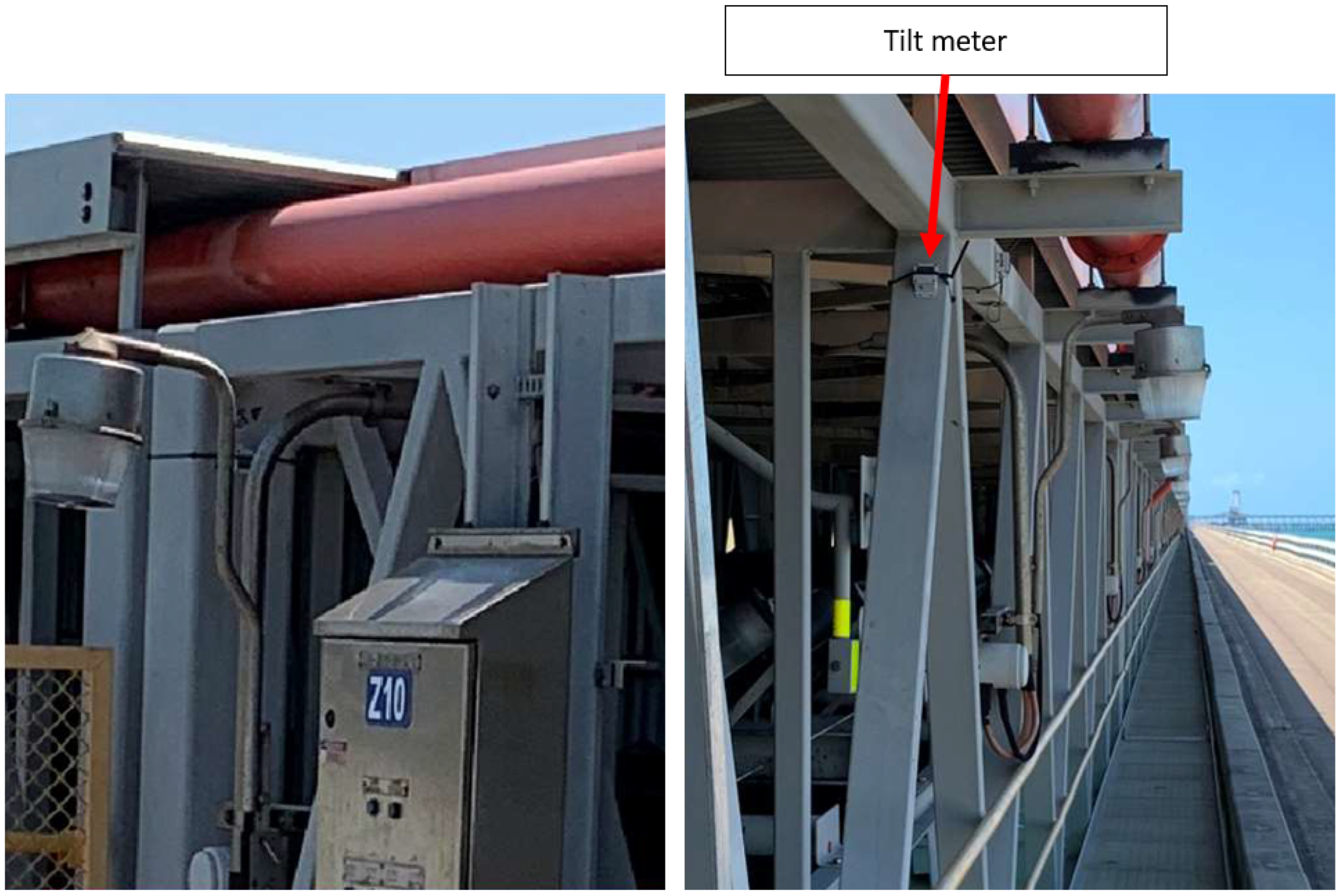
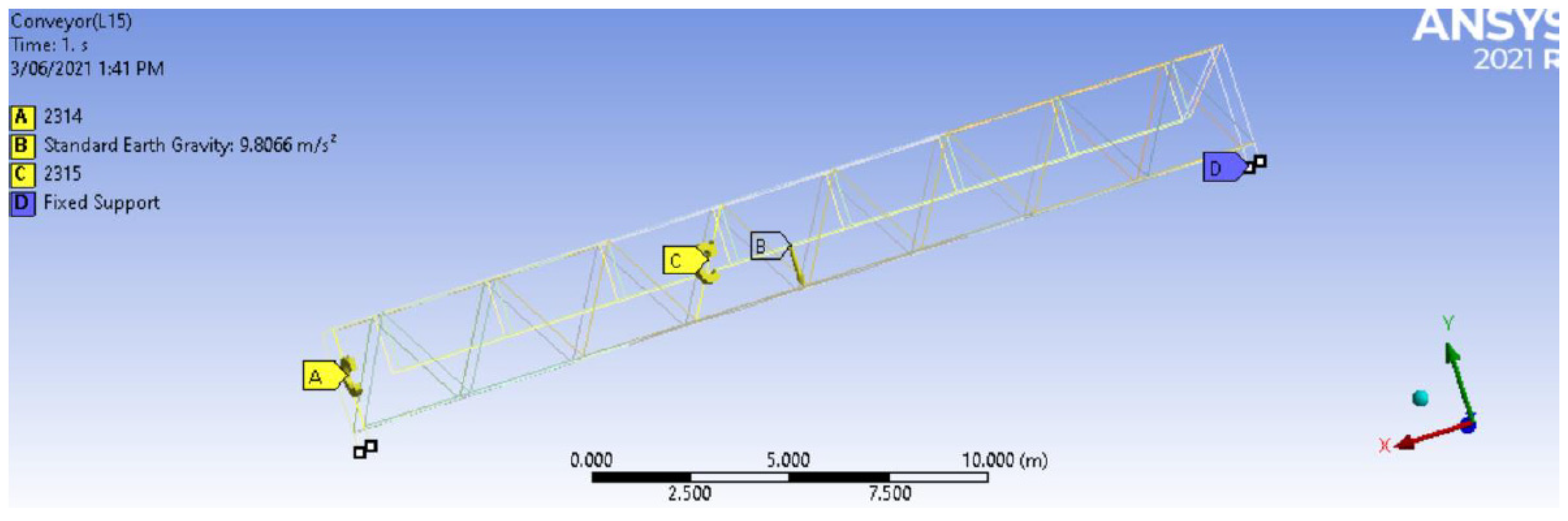
5. Case Study
Implementing the DT Concept on DBCT
- Wind and cyclonic pressures as the structure is located in a tropical coastal area and prone to cyclones and strong winds (e.g., as per AS 1170.2 the cyclonic wind speed can be as strong as 55 m/s)
- Live loads on belts and their fluctuations over time to monitor the structural responses to these loads including belt floodings and encrustation.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
Appendix A.1

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
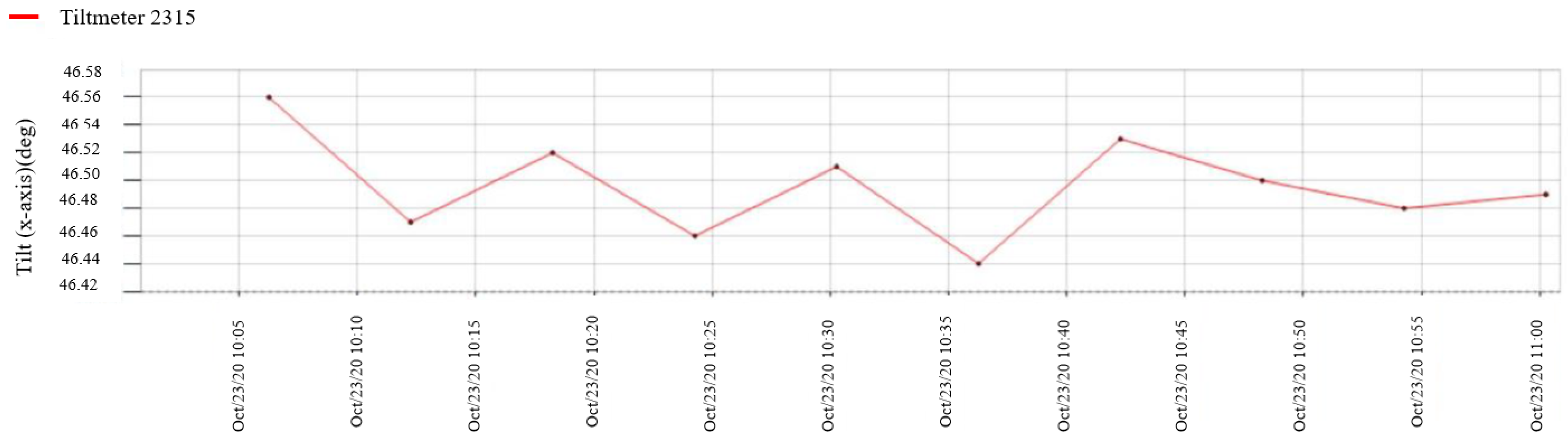
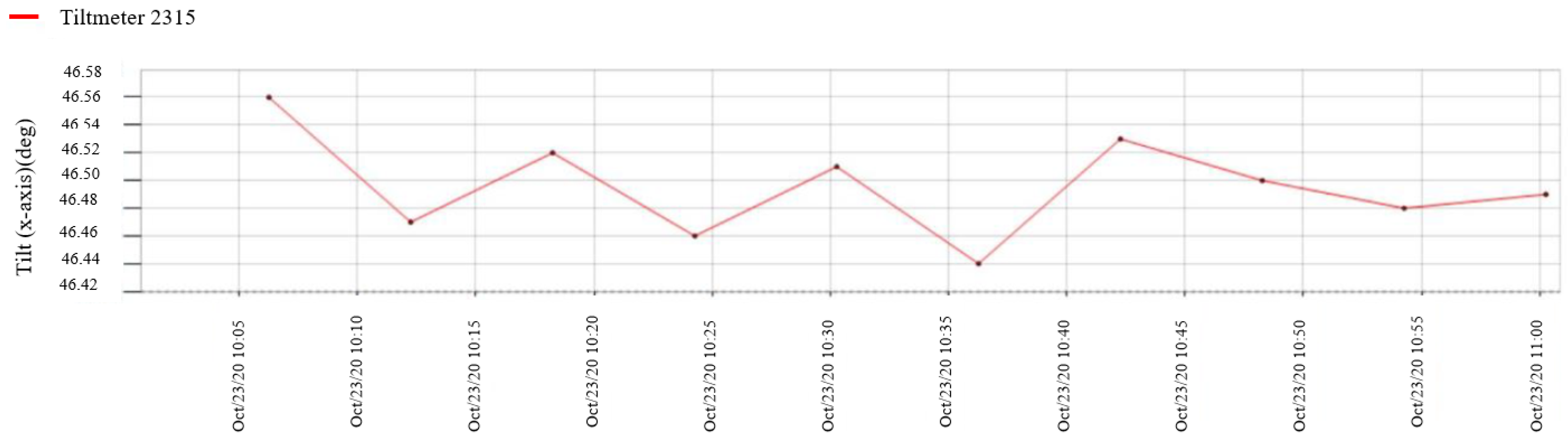
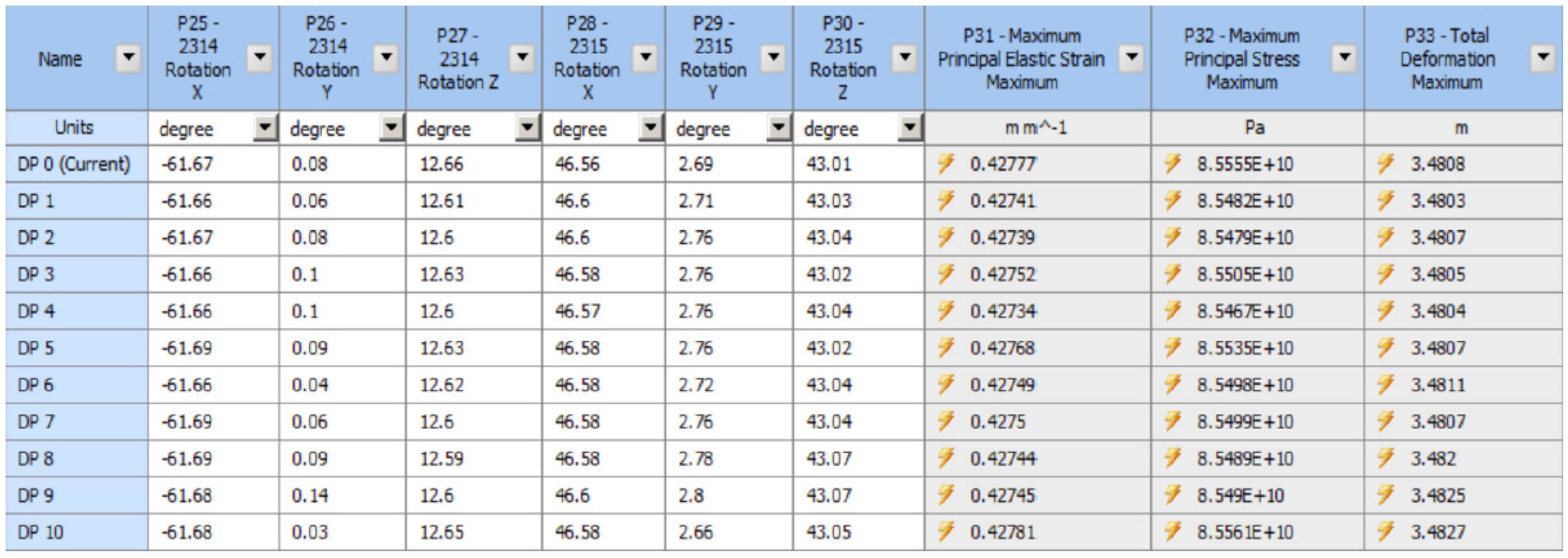
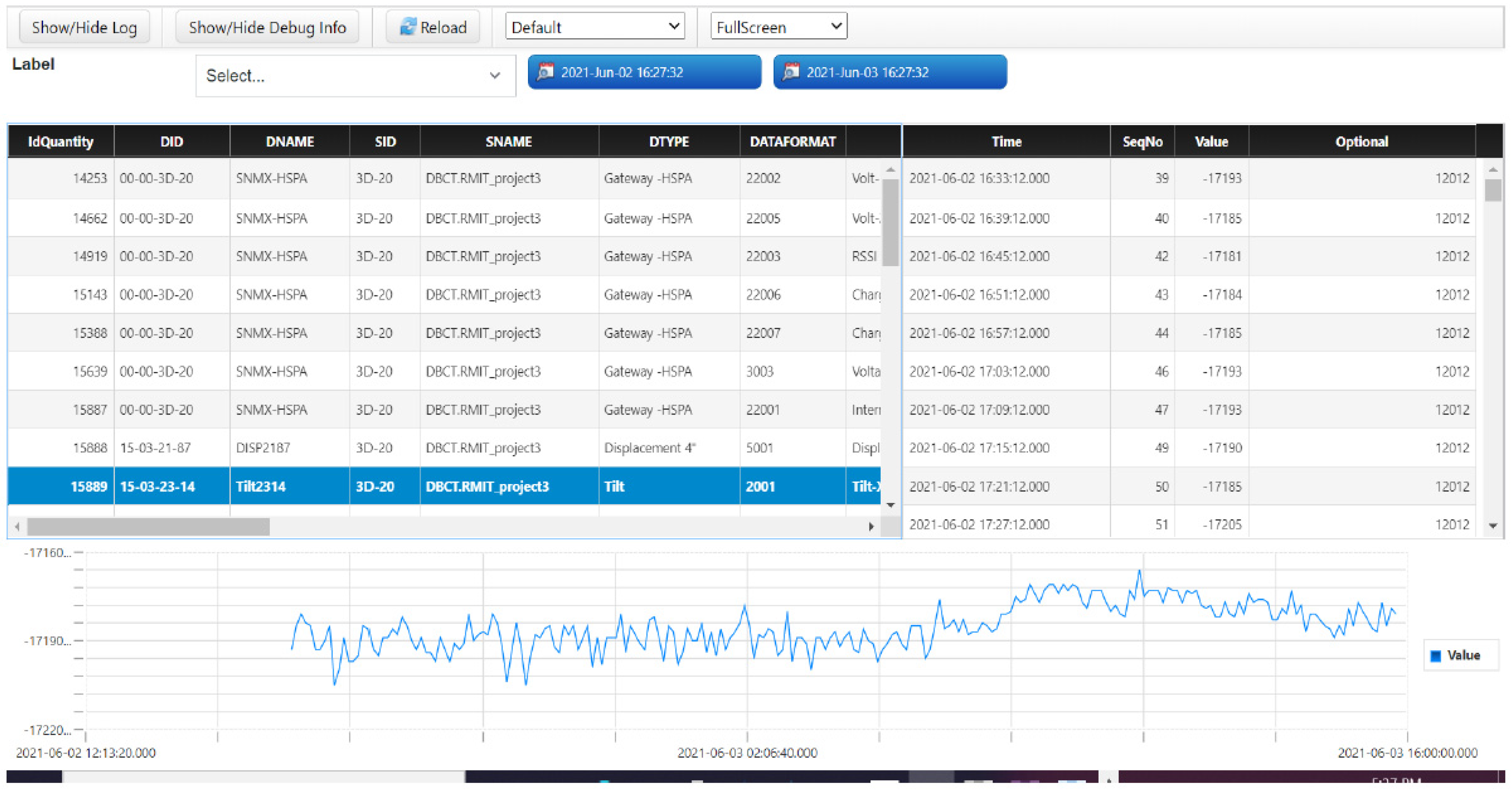
| Time | 2315 (X-Axis) | 2315 (Y-Axis) | 2315 (Z-Axis) |
|---|---|---|---|
| 4 July 2021 16:05:29.000 | 46.56 | 2.69 | 43.01 |
| 4 July 2021 16:11:29.000 | 46.6 | 2.71 | 43.03 |
| 4 July 2021 16:17:29.000 | 46.6 | 2.76 | 43.04 |
| 4 July 2021 16:23:29.000 | 46.58 | 2.76 | 43.02 |
| 4 July 2021 16:29:29.000 | 46.57 | 2.76 | 43.04 |
| 4 July 2021 16:35:29.000 | 46.58 | 2.76 | 43.03 |
| 4 July 2021 16:41:29.000 | 46.58 | 2.72 | 43.04 |
| 4 July 2021 16:47:29.000 | 46.58 | 2.76 | 43.04 |
| 4 July 2021 16:53:29.000 | 46.58 | 2.78 | 43.07 |
| 4 July 2021 16:59:29.000 | 46.6 | 2.8 | 43.07 |
| 4 July 2021 17:05:29.000 | 46.58 | 2.66 | 43.05 |
Appendix A.2
Appendix A.3

Appendix A.4. The Sequel Codes to Generate a Thing in Thingworx
Appendix A.5

References
- Medhi, M.; Dandautiya, A.; Raheja, J.L. Real-Time Video Surveillance Based Structural Health Monitoring of Civil Structures Using Artificial Neural Network. J. Nondestruct. Eval. 2019, 38, 63. [Google Scholar] [CrossRef]
- Shi, W.; Wu, C.; Wang, X. A Prototype Tool of Optimal Wireless Sensor Placement for Structural Health Monitoring; Springer International Publishing: Cham, Switzerland, 2018; pp. 53–73. [Google Scholar] [CrossRef]
- Smith, I.F.C.; Domer, B. Advanced Computing Strategies for Engineering: 25th EG-ICE International Workshop 2018, Lausanne, Switzerland, June 10–13, 2018, proceedings. Part II; Springer International Publishing: Cham, Switzerland, 2018. [Google Scholar]
- Chen, W.; Chen, K.; Cheng, J.C.P.; Wang, Q.; Gan, V.J.L. BIM-based framework for automatic scheduling of facility maintenance work orders. Autom. Constr. 2018, 91, 15–30. [Google Scholar] [CrossRef]
- Hallaji, S.M.; Fang, Y.; Winfrey, B.K. Predictive maintenance of pumps in civil infrastructure: State-of-the-art, challenges and future directions. Autom. Constr. 2022, 134, 104049. [Google Scholar] [CrossRef]
- Muttillo, M.; Stornelli, V.; Alaggio, R.; Paolucci, R.; Di Battista, L.; de Rubeis, T.; Ferri, G. Structural Health Monitoring: An IoT Sensor System for Structural Damage Indicator Evaluation. Sensors 2020, 20, 4908. [Google Scholar] [CrossRef] [PubMed]
- Artus, M.; Koch, C. State of the art in damage information modeling for RC bridges—A literature review. Adv. Eng. Inform. 2020, 46, 101171. [Google Scholar] [CrossRef]
- Shangguan, D.; Chen, L.; Ding, J. A Digital Twin-Based Approach for the Fault Diagnosis and Health Monitoring of a Complex Satellite System. Symmetry 2020, 12, 1307. [Google Scholar] [CrossRef]
- Mourtzis, D.; Angelopoulos, J.; Panopoulos, N. Intelligent Predictive Maintenance and Remote Monitoring Framework for Industrial Equipment Based on Mixed Reality. Front. Mech. Eng. 2020, 6, 578379. [Google Scholar] [CrossRef]
- Errandonea, I.; Beltrán, S.; Arrizabalaga, S. Digital Twin for maintenance: A literature review. Comput. Ind. 2020, 123, 103316. [Google Scholar] [CrossRef]
- Haag, S.; Anderl, R. Digital twin—Proof of concept. Manuf. Lett. 2018, 15, 64–66. [Google Scholar] [CrossRef]
- Mourtzis, D.; Angelopoulos, J.; Panopoulos, N. Design and Development of an Edge-Computing Platform Towards 5G Technology Adoption for Improving Equipment Predictive Maintenance. Procedia Comput. Sci. 2022, 200, 611–619. [Google Scholar] [CrossRef]
- Meng, X.; Nguyen, D.T.; Xie, Y.; Owen, J.S.; Psimoulis, P.; Ince, S.; Chen, Q.; Ye, J.; Bhatia, P. Design and Implementation of a New System for Large Bridge Monitoring-GeoSHM. Sensors 2018, 18, 775. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Heo, G.; Son, B.; Kim, C.; Jeon, S.; Jeon, J. Development of a wireless unified-maintenance system for the structural health monitoring of civil structures. Sensors 2018, 18, 1485. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Theiler, M.; Dragos, K.; Smarsly, K. Semantic Description of Structural Health Monitoring Algorithms Using Building Information Modeling; Springer International Publishing: Cham, Switzerland, 2018; pp. 150–170. [Google Scholar]
- Valinejadshoubi, M.; Bagchi, A.; Moselhi, O. Development of a BIM-Based Data Management System for Structural Health Monitoring with Application to Modular Buildings: Case Study. J. Comput. Civ. Eng. 2019, 33, 5019003. [Google Scholar] [CrossRef]
- Feng, D.; Feng, M.Q. Identification of structural stiffness and excitation forces in time domain using noncontact vision-based displacement measurement. J. Sound Vib. 2017, 406, 15–28. [Google Scholar] [CrossRef]
- Rubert, T.; Perry, M.; Fusiek, G.; McAlorum, J.; Niewczas, P.; Brotherston, A.; McCallum, D. Field Demonstration of Real-Time Wind Turbine Foundation Strain Monitoring. Sensors 2018, 18, 97. [Google Scholar] [CrossRef] [Green Version]
- Quqa, S.; Landi, L.; Diotallevi, P.P. Seismic structural health monitoring using the modal assurance distribution. Earthq. Eng. Struct. Dyn. 2021, 50, 2379–2397. [Google Scholar] [CrossRef]
- Reagan, D.; Sabato, A.; Niezrecki, C. Feasibility of using digital image correlation for unmanned aerial vehicle structural health monitoring of bridges. Struct. Health Monit. 2018, 17, 1056–1072. [Google Scholar] [CrossRef]
- Moi, T.; Cibicik, A.; Rølvåg, T. Digital twin based condition monitoring of a knuckle boom crane: An experimental study. Eng. Fail. Anal. 2020, 112, 104517. [Google Scholar] [CrossRef]
- Lin, K.; Xu, Y.-L.; Lu, X.; Guan, Z.; Li, J. Digital twin-based collapse fragility assessment of a long-span cable-stayed bridge under strong earthquakes. Autom. Constr. 2021, 123, 1. [Google Scholar] [CrossRef]
- Zhang, L.; Zhou, L.; Horn, B.K.P. Building a right digital twin with model engineering. J. Manuf. Syst. 2021, 59, 151–164. [Google Scholar] [CrossRef]
- Rosen, R.; von Wichert, G.; Lo, G.; Bettenhausen, K.D. About The Importance of Autonomy and Digital Twins for the Future of Manufacturing. IFAC-Papersonline 2015, 48, 567–572. [Google Scholar] [CrossRef]
- Boschert, S.; Rosen, R. Digital Twin—The Simulation Aspect; Springer International Publishing: Cham, Switzerland, 2016; pp. 59–74. [Google Scholar]
- Grieves, M.; Vickers, J. Digital Twin: Mitigating Unpredictable, Undesirable Emergent Behavior in Complex Systems; Springer International Publishing: Cham, Switzerland, 2016; pp. 85–113. [Google Scholar]
- Delzendeh Elham, A.-A.M. Digital Twin in Construction—Part 2. Available online: https://cyberrealityx.com/digital-twin-in-construction-2/ (accessed on 20 August 2021).
- iMove Smart Bridge Health Monitoring and Maintenance Prediction. Available online: https://imoveaustralia.com/project/smart-bridge-health-monitoring-and-maintenance-prediction/?subscribe=success#subscribe-blog-1 (accessed on 3 May 2022).
- Wang, K.-J.; Lee, T.-L.; Hsu, Y. Revolution on digital twin technology—A patent research approach. Int. J. Adv. Manuf. Technol. 2020, 107, 4687–4704. [Google Scholar] [CrossRef]
- Hlady, J.; Glanzer, M.; Fugate, L. Automated Creation of the Pipeline Digital Twin During Construction: Improvement to Construction Quality and Pipeline Integrity. In Proceedings of the 2018 12th International Pipeline Conference, Calgary, AB, Canada, 24–28 September 2018; p. V002T02A004. [Google Scholar] [CrossRef]
- Barbosa, A.d.S.; Silva, F.P.; Crestani, L.R.d.S.; Otto, R.B. Virtual assistant to real time training on industrial environment. In Transdisciplinary Engineering Methods for Social Innovation of Industry 4.0; IOS Press: Amsterdam, The Netherlands, 2018; pp. 33–42. [Google Scholar] [CrossRef]
- Kaewunruen, S.; Xu, N. Digital Twin for Sustainability Evaluation of Railway Station Buildings. Front. Built Environ. 2018, 4, 77. [Google Scholar] [CrossRef] [Green Version]
- Pairet, È.; Ardón, P.; Liu, X.; Lopes, J.; Hastie, H.; Lohan, K. A Digital Twin for Human-Robot Interaction. In Proceedings of the 2019 14th ACM/IEEE International Conference on Human-Robot Interaction (HRI), Daegu, Korea, 11–14 March 2019; p. 372. [Google Scholar]
- Rødseth, H.; Eleftheriadis, R.; Lodgaard, E.; Fordal, J. Operator 4.0—Emerging Job Categories in Manufacturing; Springer: Singapore, 2019; pp. 114–121. [Google Scholar]
- Longo, F.; Nicoletti, L.; Padovano, A. Ubiquitous knowledge empowers the Smart Factory: The impacts of a Service-oriented Digital Twin on enterprises’ performance. Annu. Rev. Control 2019, 47, 221–236. [Google Scholar] [CrossRef]
- Venables, M. Future maintenance: Transitioning from digitalisation to industry 4.0. Plant Eng. 2017, 2017, 10–12. [Google Scholar]
- Omer, M.; Margetts, L.; Hadi Mosleh, M.; Hewitt, S.; Parwaiz, M. Use of gaming technology to bring bridge inspection to the office. Struct. Infrastruct. Eng. 2019, 15, 1292–1307. [Google Scholar] [CrossRef] [Green Version]
- Anderson, S.; Barvik, S.; Rabitoy, C. Innovative Digital Inspection Methods; Offshore Technology Conference: Houston, TX, USA, 2019. [Google Scholar]
- Tekinerdogan, B.; Verdouw, C. Systems architecture design pattern catalog for developing digital twins. Sensors 2020, 20, 5103. [Google Scholar] [CrossRef]
- Pal, S.K.; Mishra, D.; Pal, A.; Dutta, S.; Chakravarty, D.; Pal, S. Digital Twin—Fundamental Concepts to Applications in Advanced Manufacturing; Springer International Publishing AG: Cham, Switzerland, 2021. [Google Scholar]
- Palo, H.K. Semantic IoT: The Key to Realizing IoT Value; Springer International Publishing: Cham, Switzerland, 2021; Volume 941, pp. 81–102. [Google Scholar]
- Grzybek, H.; Xu, S.; Gulliver, S.; Fillingham, V. Considering the Feasibility of Semantic Model Design in the Built-Environment. Buildings 2014, 4, 849–879. [Google Scholar] [CrossRef] [Green Version]
- Ye, C.; Butler, L.; Calka, B.; Iangurazov, M.; Lu, Q.; Gregory, A.; Girolami, M.; Middleton, C. A digital twin of bridges for structural health monitoring. In Structural Health Monitoring 2019: Enabling Intelligent Life-Cycle Health Management for Industry Internet of Things (IIOT)—Proceedings of the 12th International Workshop on Structural Health Monitoring; DEStech Publications: Stanford, CA, USA, 2019. [Google Scholar] [CrossRef]
- Kritzinger, W.; Karner, M.; Traar, G.; Henjes, J.; Sihn, W. Digital Twin in manufacturing: A categorical literature review and classification. IFAC Pap. 2018, 51, 1016–1022. [Google Scholar] [CrossRef]
- Shahrivar, F.; Mahmoodian, M.; Li, C.Q. Comparative analysis of Fuzzy Multi Criteria Decision Making methods in maintenance prioritization of infrastructure assets. Int. J. Crit. Infrastruct. 2022, 18, 1. [Google Scholar] [CrossRef]
- Shim, C.-S.; Dang, N.-S.; Lon, S.; Jeon, C.-H. Development of a bridge maintenance system for prestressed concrete bridges using 3D digital twin model. Struct. Infrastruct. Eng. 2019, 15, 1319–1332. [Google Scholar] [CrossRef]
















| BIM | DT |
|---|---|
| Static data | Static and dynamic data |
| Formed by data | Includes both data and algorithms to explain the behaviour of physical object |
| Cannot be networked | Networkable |
| Cannot be updated without manual intervention | Continuously linked to the physical object and gets updated |
| Is not designed for real-time operational monitoring | Is fed by real-time data |
| Physics-Based | Data-Driven | |
|---|---|---|
| Relates performance data with prior physics-based model predictions (from FEMs). | Is formulated based on performance data and forms a statistical model to identify trends, patterns, and correlations | |
| Capabilities |
|
|
| Limitations |
|
|
| Modelling | Higher effort is required | Comparatively lower effort is required |
| Load Case | Loading/m Conveyor | Loading per Member per Node |
|---|---|---|
| Self-weight | 1 G | |
| Live distribution 4 m/s | 250 kg/m | 1.225 KN/m |
| Live point 4 m/s | 750 kg/space | 3.679 KN/m |
| Dead distributed load from conveyor | 10 kg/m | 0.049 KN/m |
| Dead point load from conveyor | 30 kg/space | 0.147 KN/node |
| Wind load (+ve) | 20 m/s | 1.43 KN/m |
| Wind load (−ve) | 20 m/s | −1.43 KN/m |
| Cyclonic load normal to longitudinal section | 55 m/s | 3.9 KN/m |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mahmoodian, M.; Shahrivar, F.; Setunge, S.; Mazaheri, S. Development of Digital Twin for Intelligent Maintenance of Civil Infrastructure. Sustainability 2022, 14, 8664. https://doi.org/10.3390/su14148664
Mahmoodian M, Shahrivar F, Setunge S, Mazaheri S. Development of Digital Twin for Intelligent Maintenance of Civil Infrastructure. Sustainability. 2022; 14(14):8664. https://doi.org/10.3390/su14148664
Chicago/Turabian StyleMahmoodian, Mojtaba, Farham Shahrivar, Sujeeva Setunge, and Sam Mazaheri. 2022. "Development of Digital Twin for Intelligent Maintenance of Civil Infrastructure" Sustainability 14, no. 14: 8664. https://doi.org/10.3390/su14148664
APA StyleMahmoodian, M., Shahrivar, F., Setunge, S., & Mazaheri, S. (2022). Development of Digital Twin for Intelligent Maintenance of Civil Infrastructure. Sustainability, 14(14), 8664. https://doi.org/10.3390/su14148664