
Adoption of Micro-Mobility Solutions for Improving Environmental Sustainability: Comparison among Transportation Systems in Urban Contexts

 ,
, 
 ,
, 
Abstract
:1. Introduction
- Conceive and design cities as places for parked cars (parking lots rather than roads need to be built);
- Increase the utilization of cars through car-sharing solutions (to change their primary use) and/or reduce the number of parked vehicles in urban centres by car-pooling (to increase the number of passengers carried by each vehicle);
- Adopt micro-mobility solutions as an alternative means to cars, either directly (in the case of trips made entirely with micro-mobility vehicles) or indirectly (in the case of adduction system to increase the attractiveness of public transport with respect to private cars).
2. Literary Review on Emission Factors of Different Transport Modes
3. Methodologies for Comparing Transportation Systems in a Sustainable Perspective
4. Application to a Real Urban Context
- Phase 1: one or more models were set up to describe user behaviour in terms of e-scooter trips;
- Phase 2: the environmental performance of e-scooters was compared to that of other transportation systems.
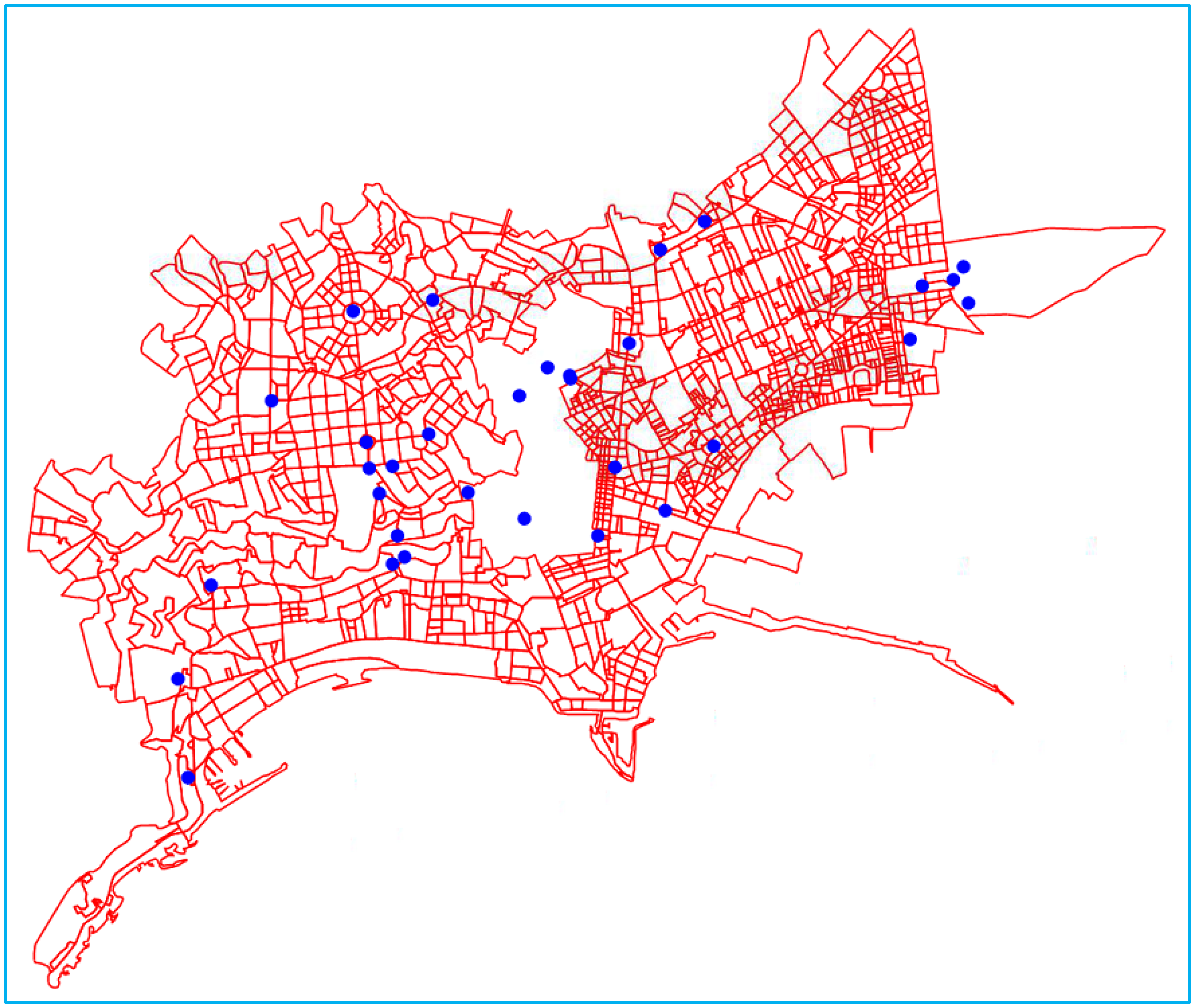
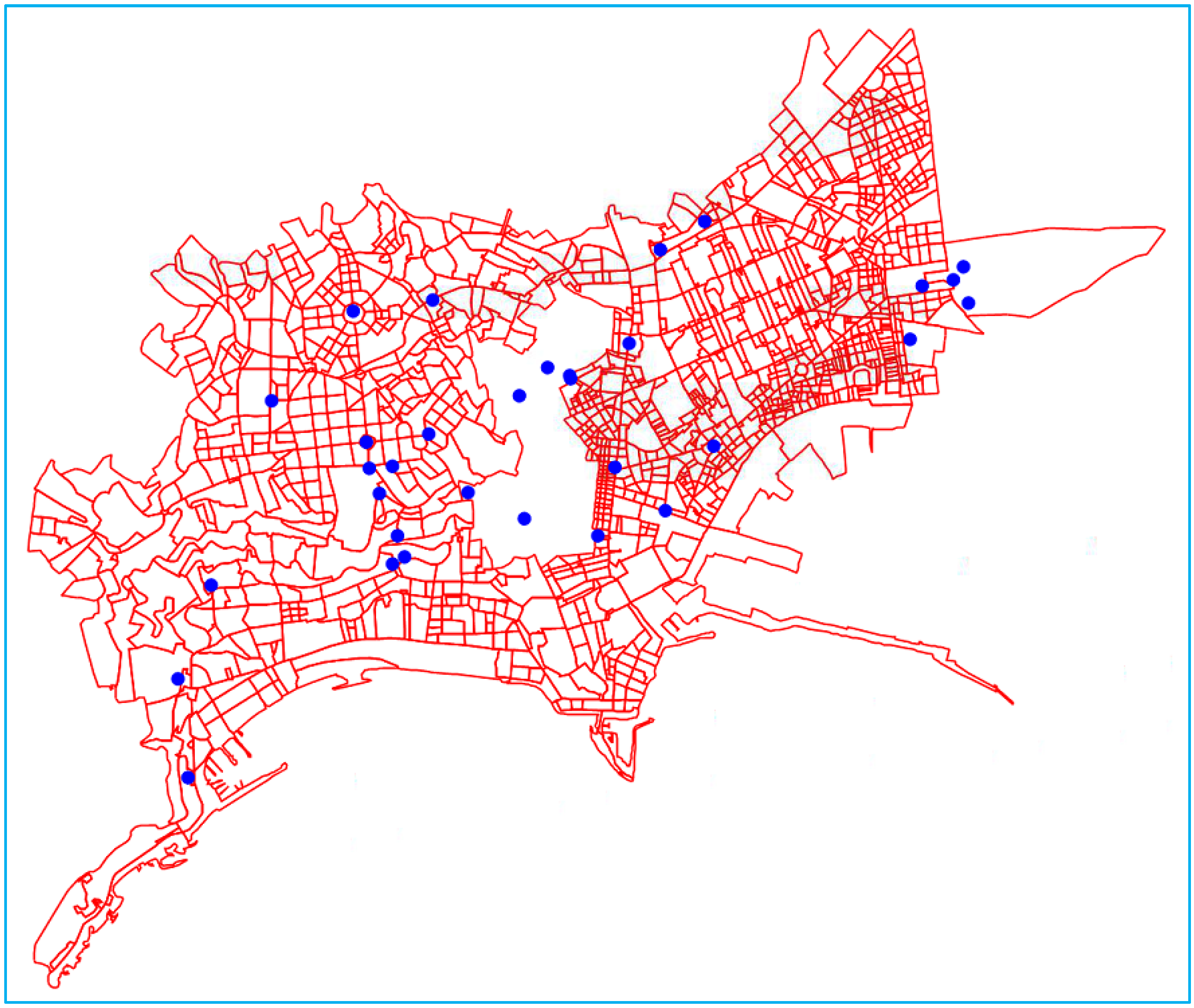
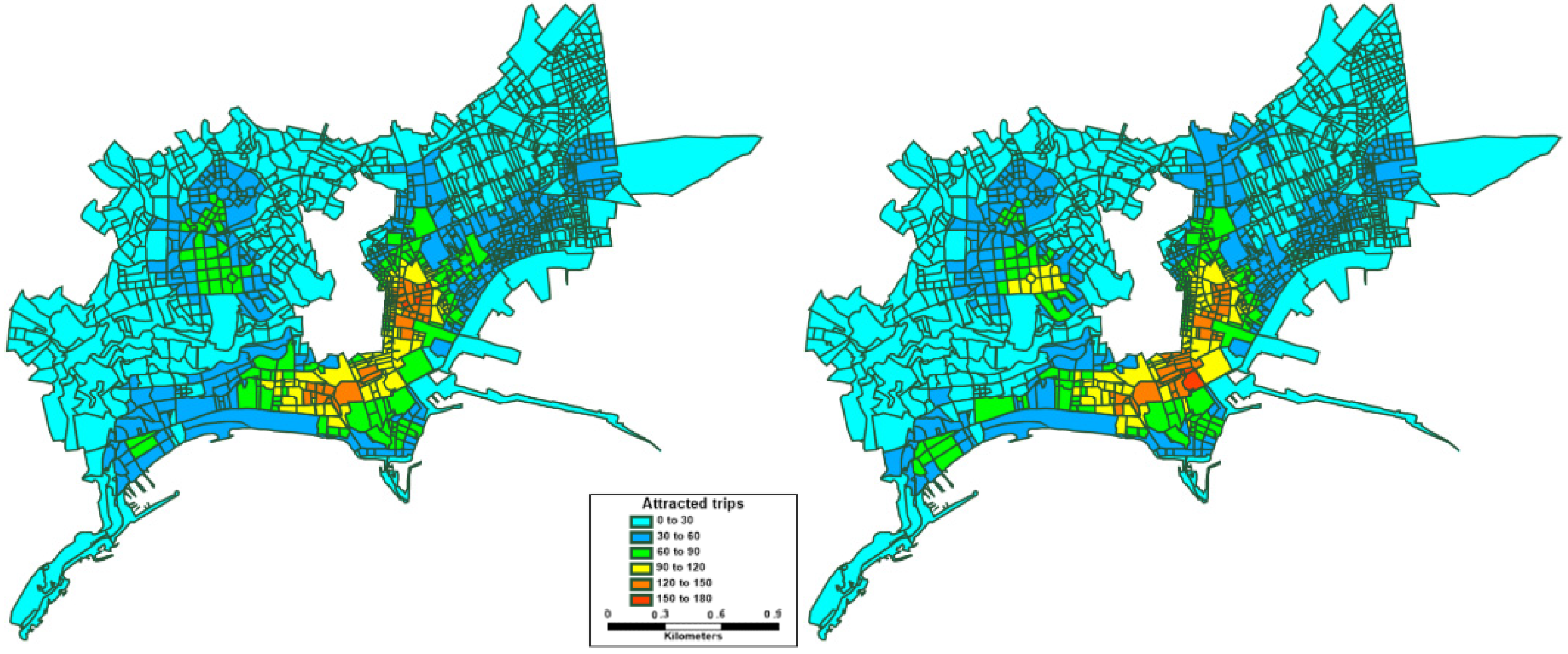
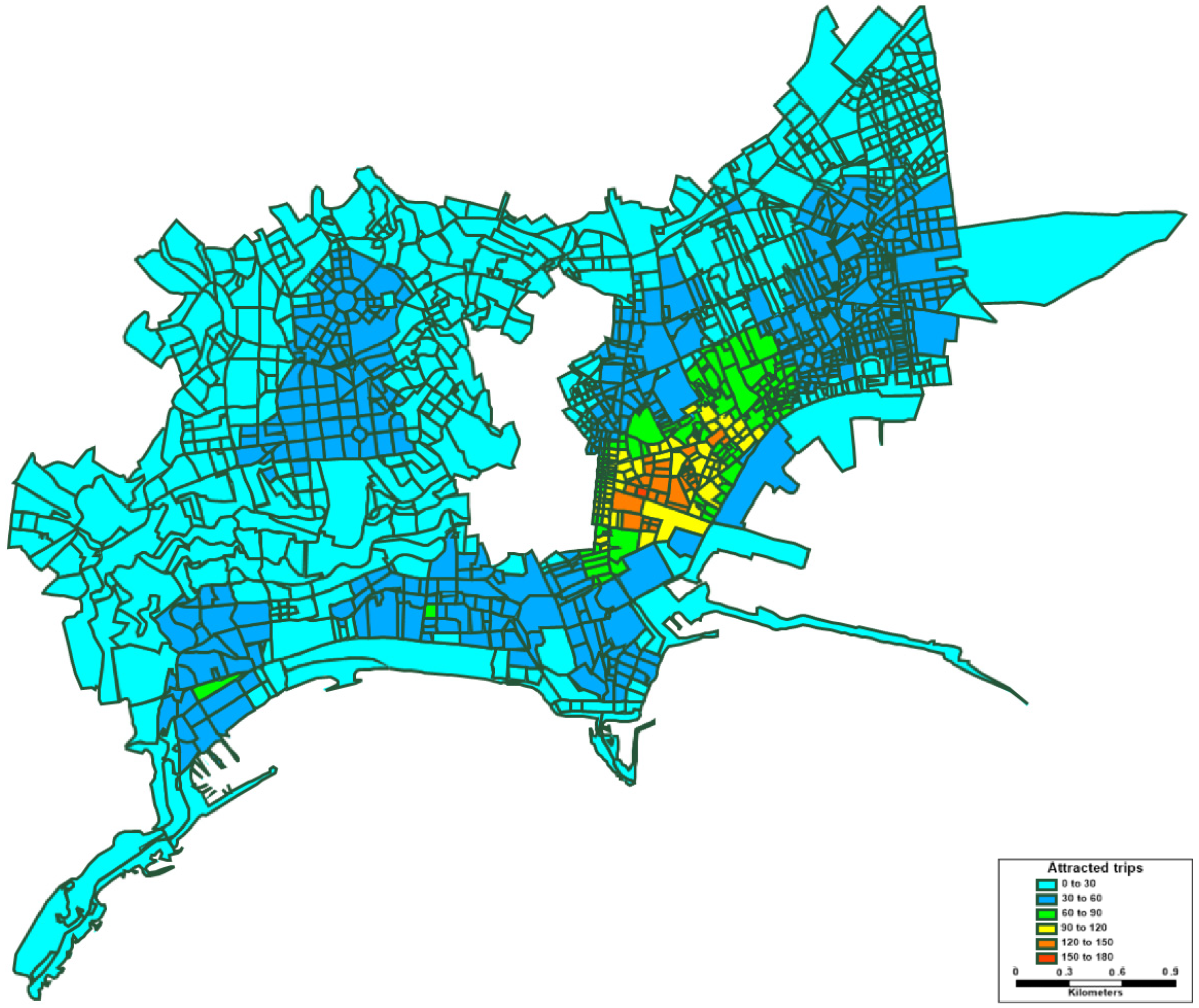
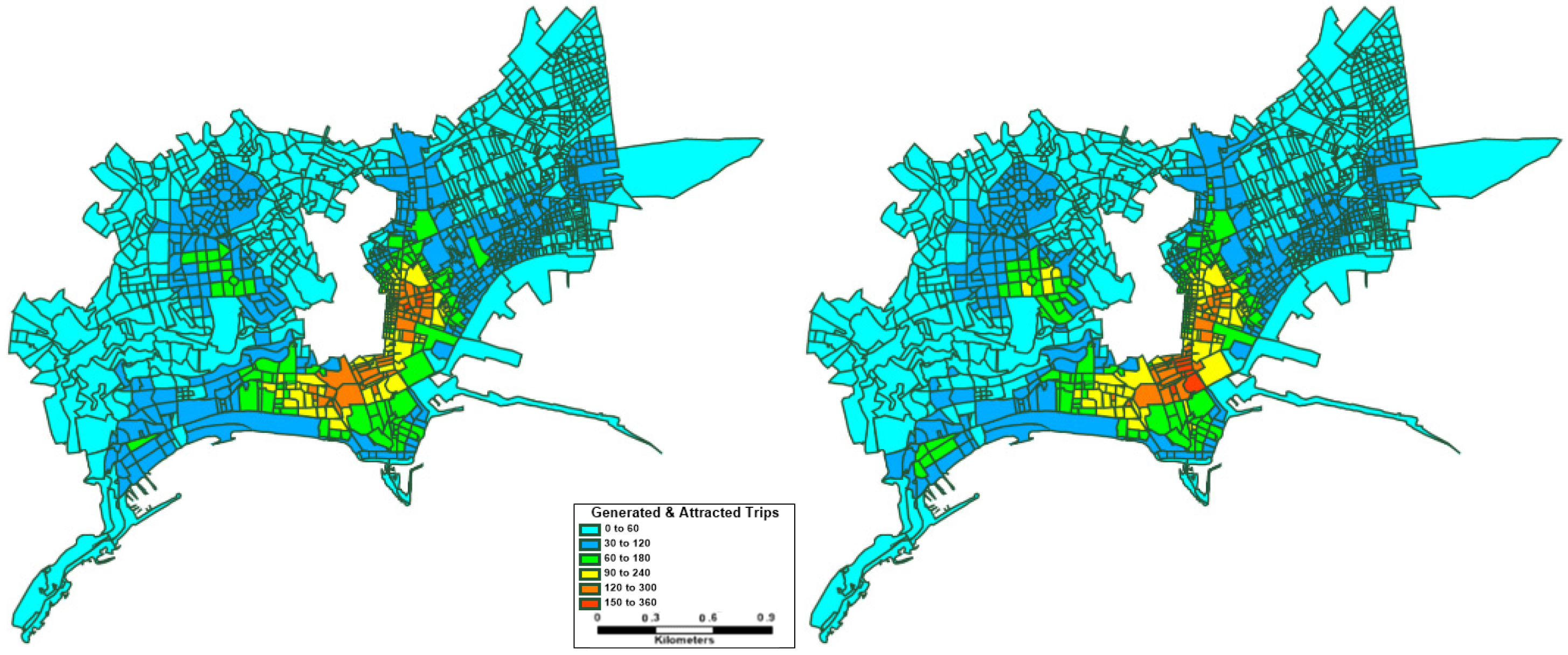
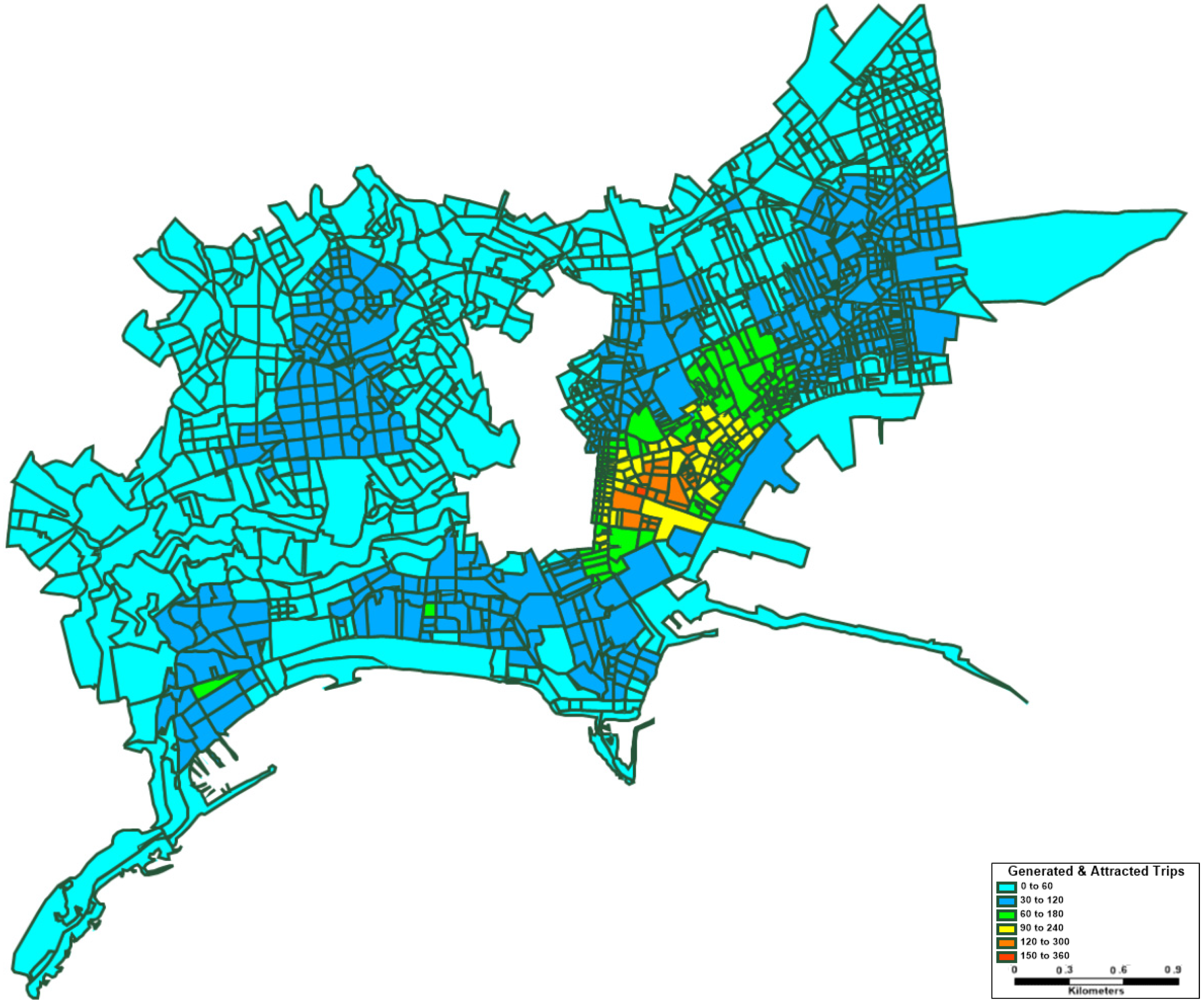
4.1. Model Definition to Describe User Behaviour
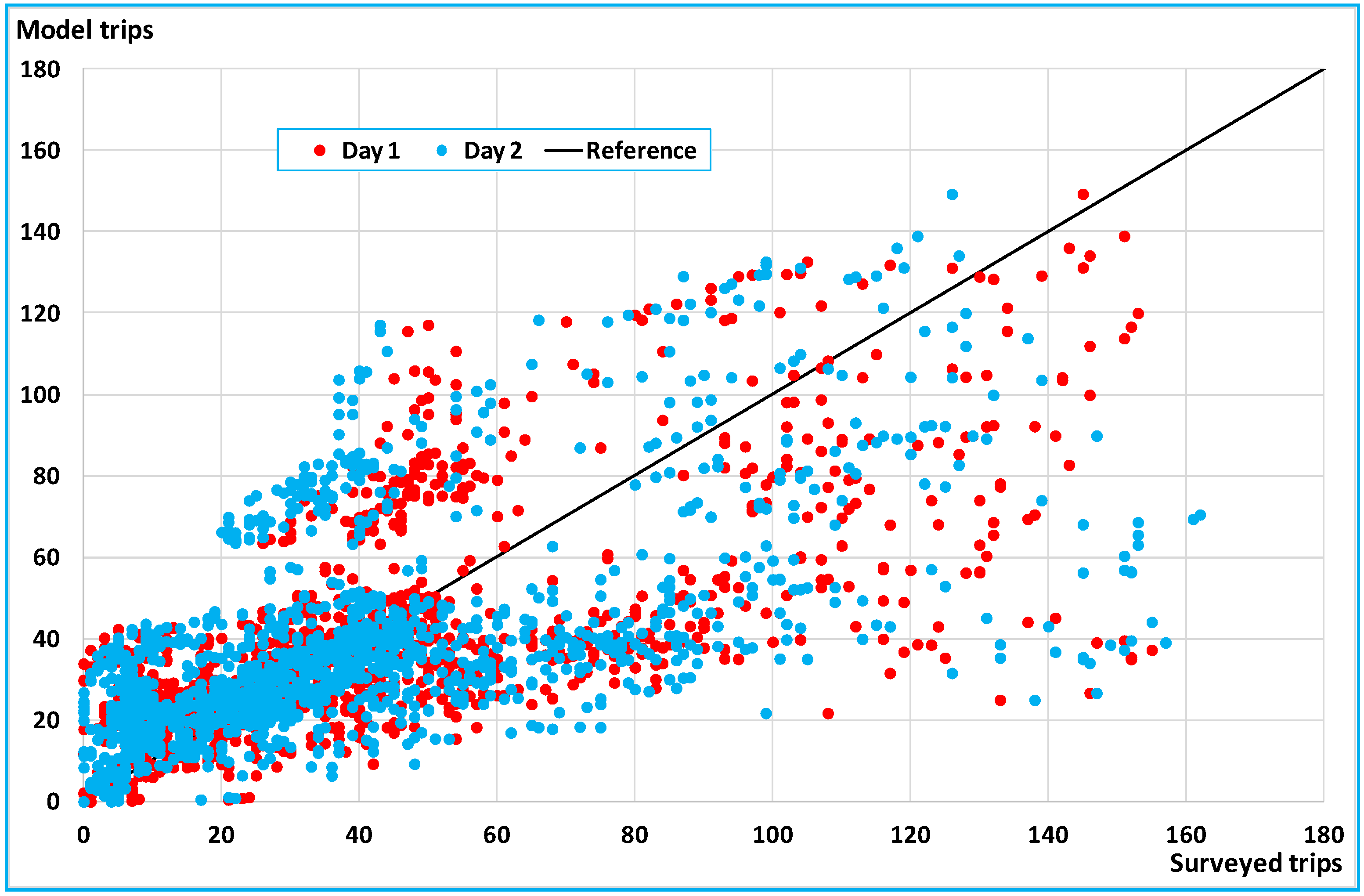
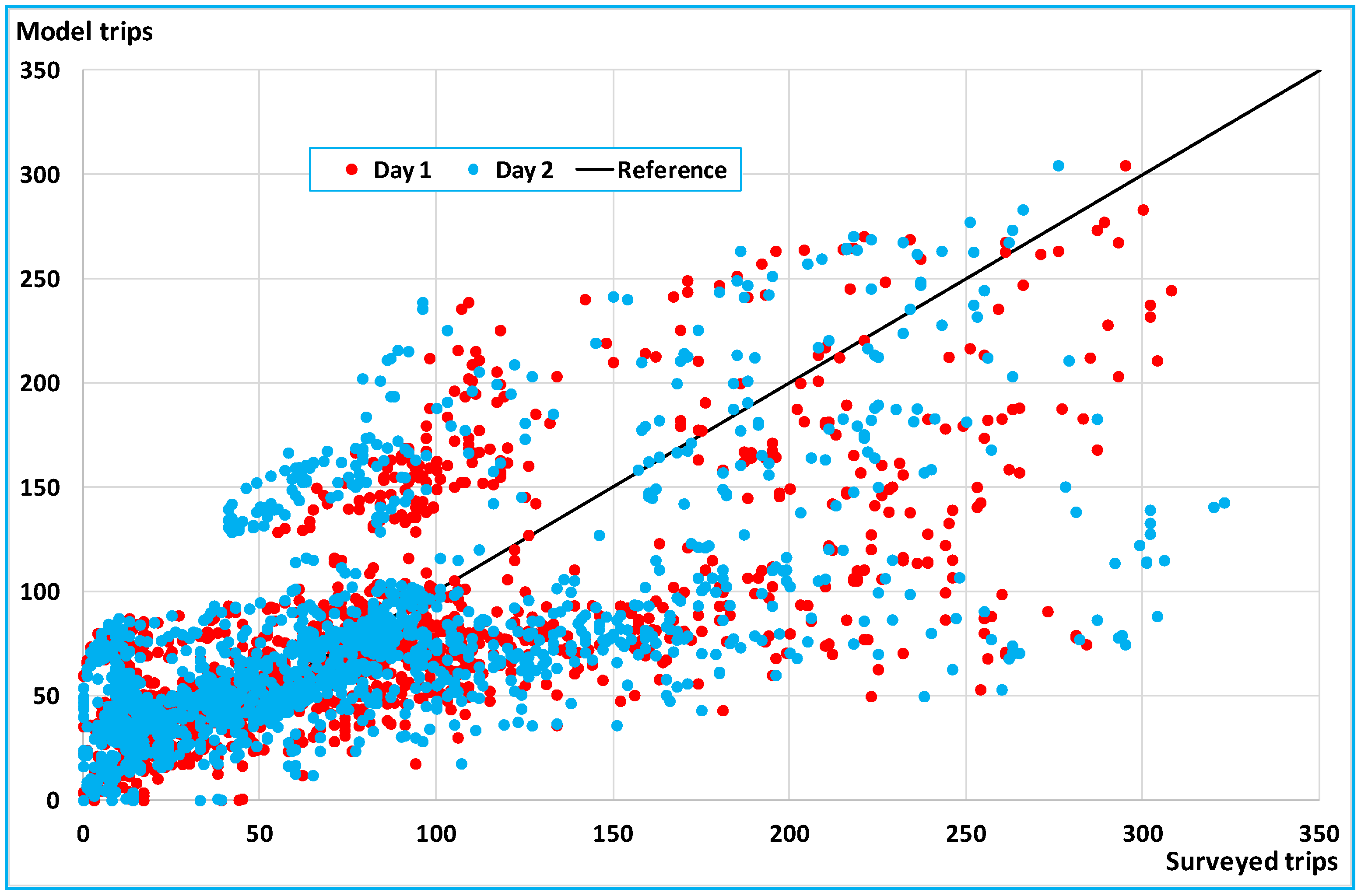
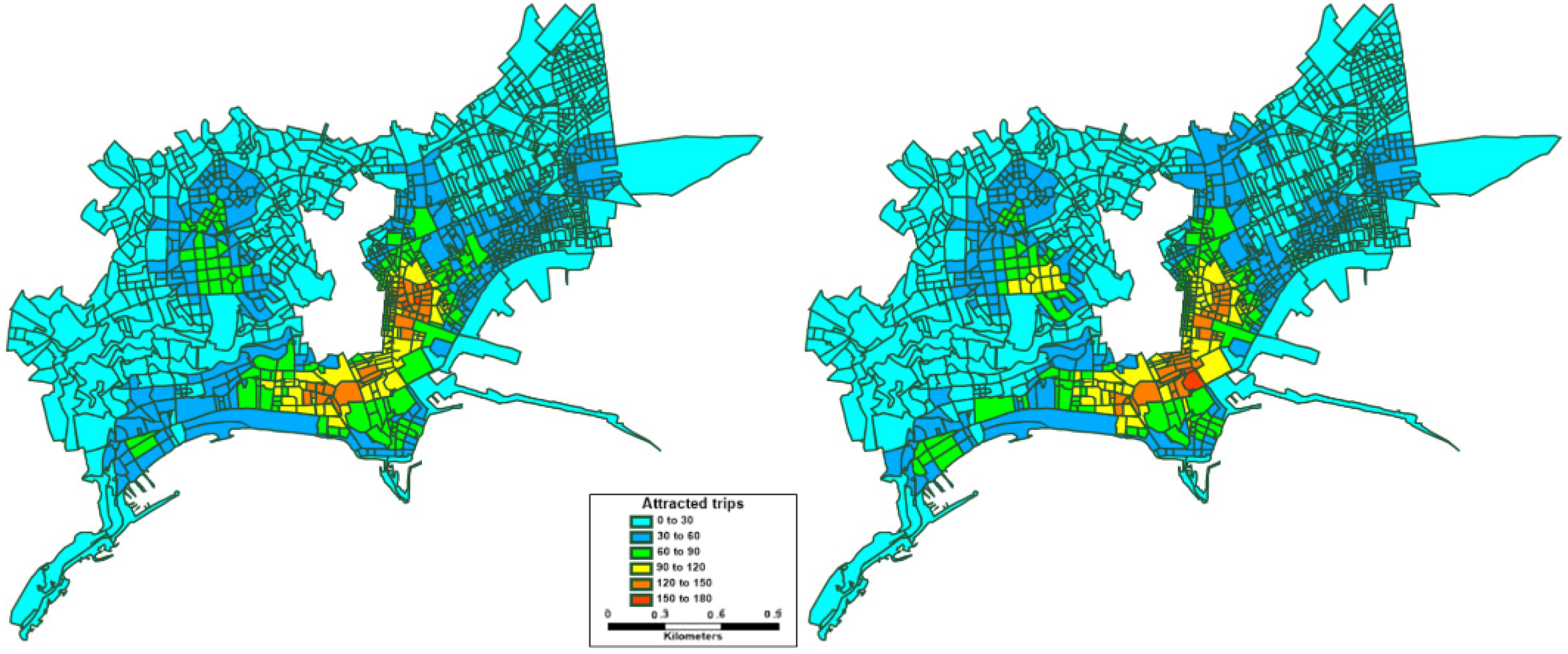
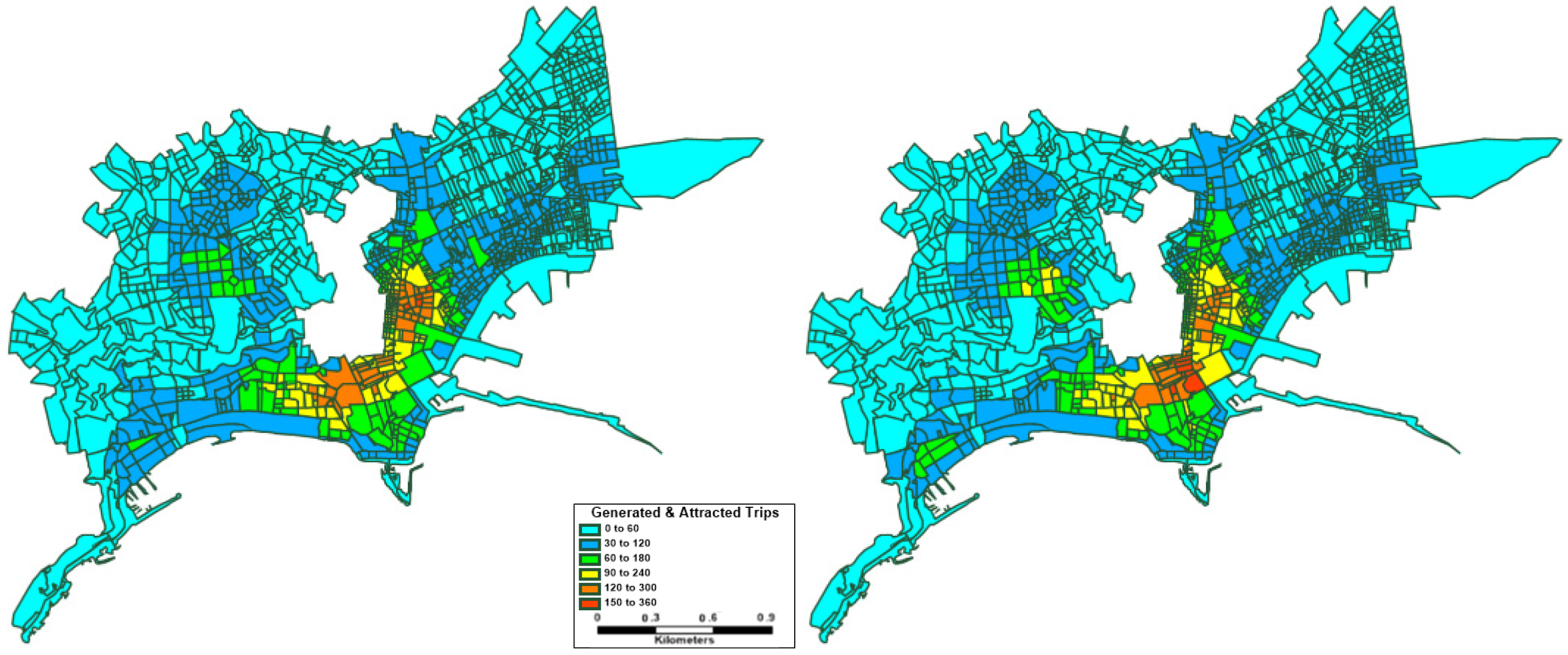
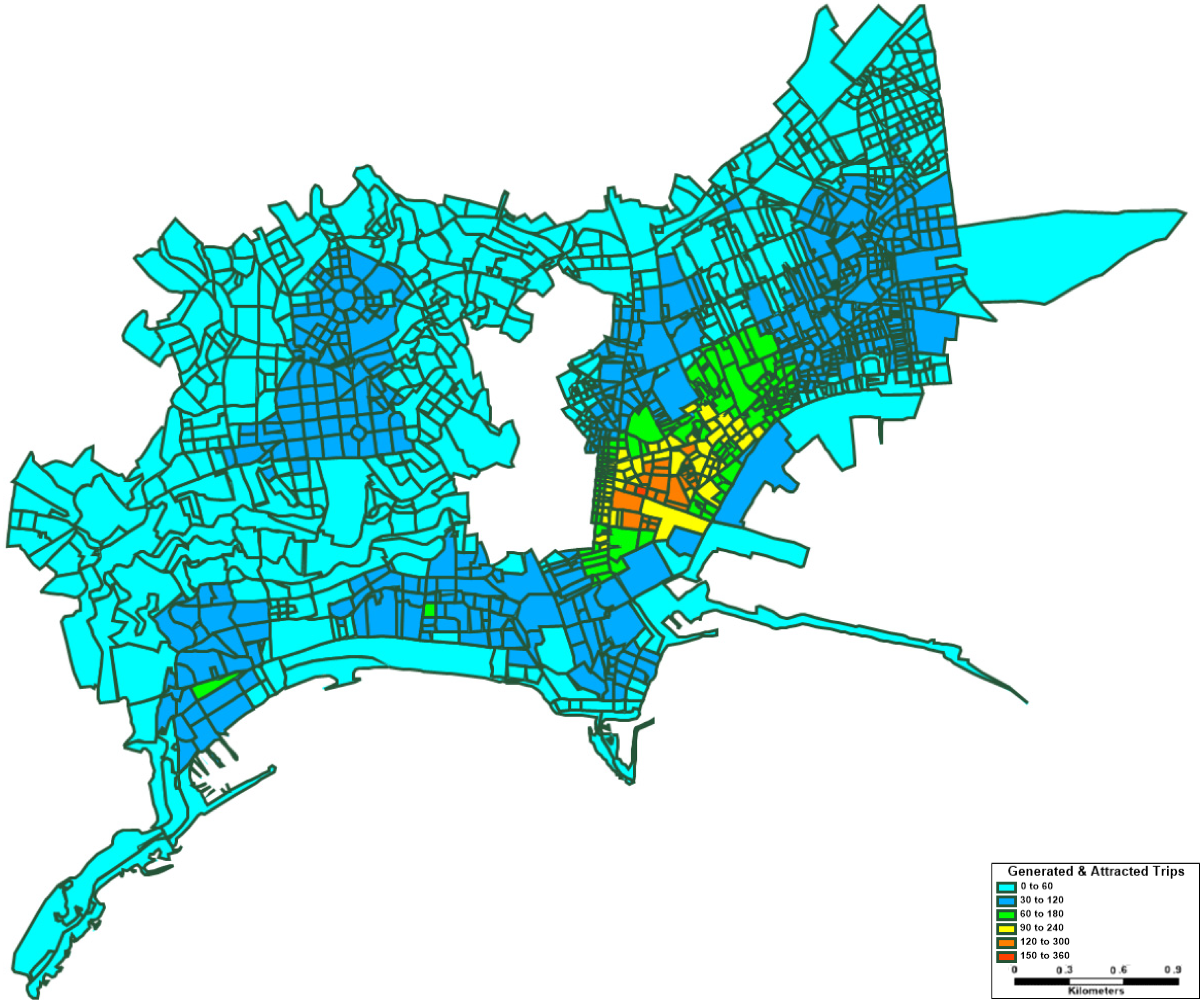
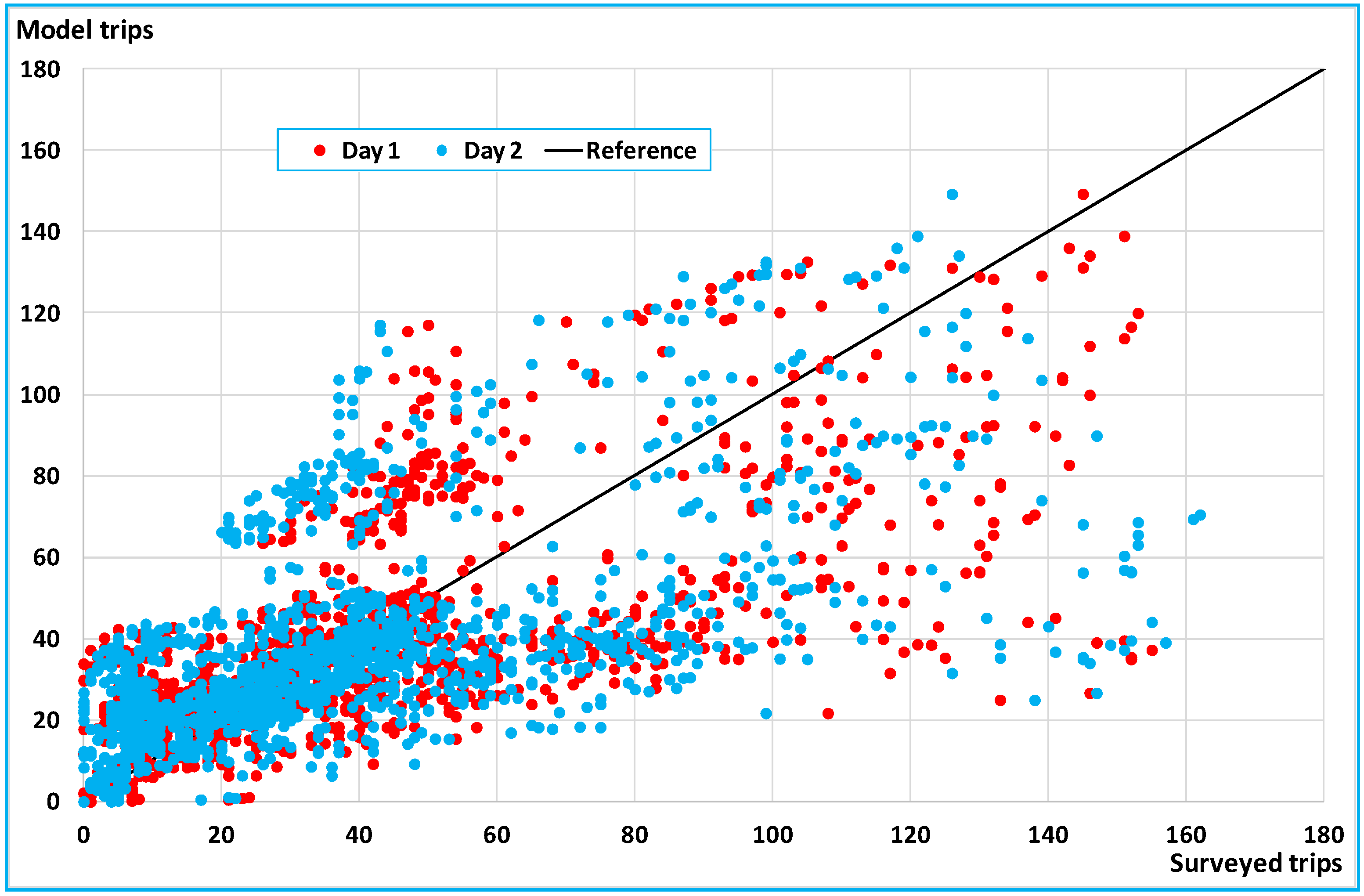
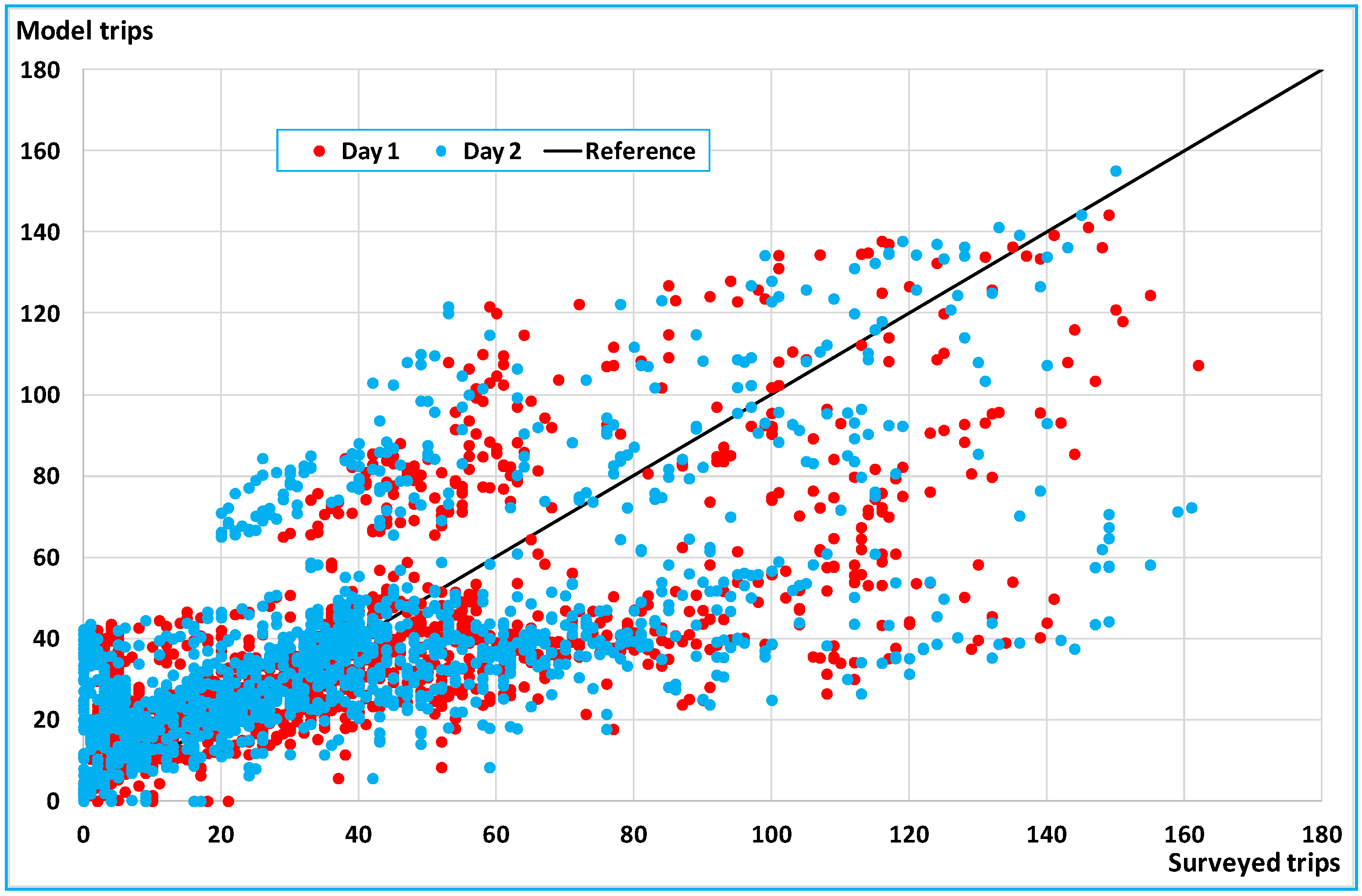
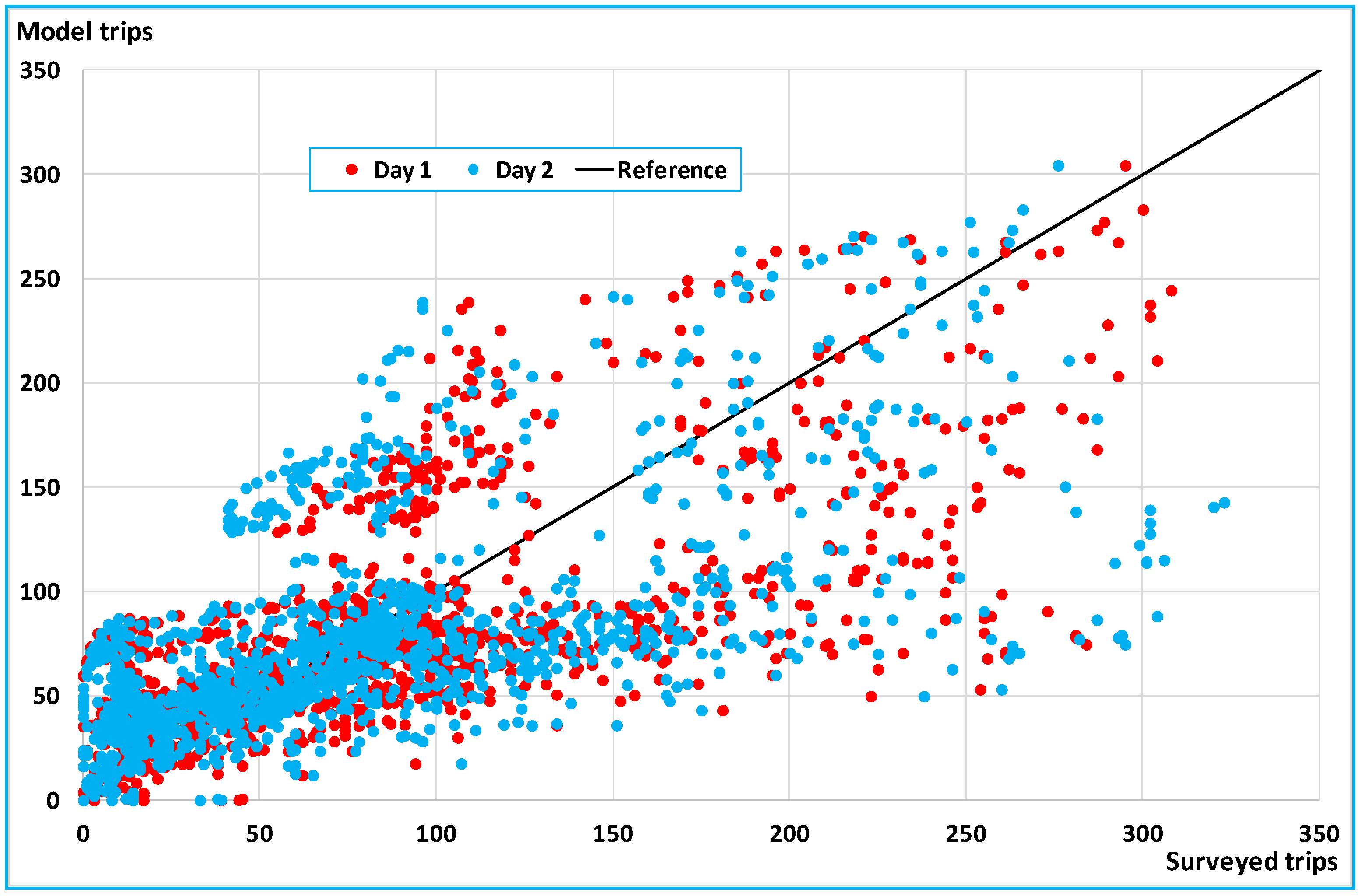
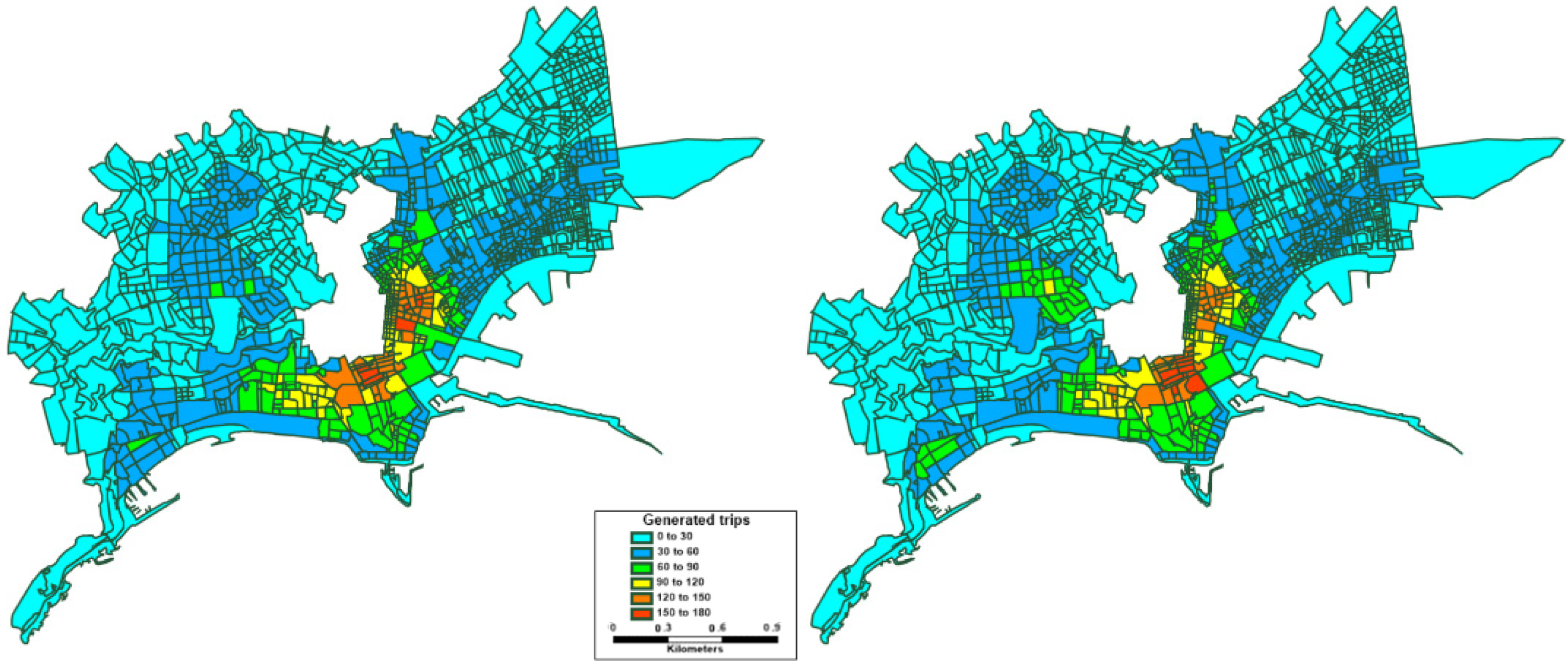
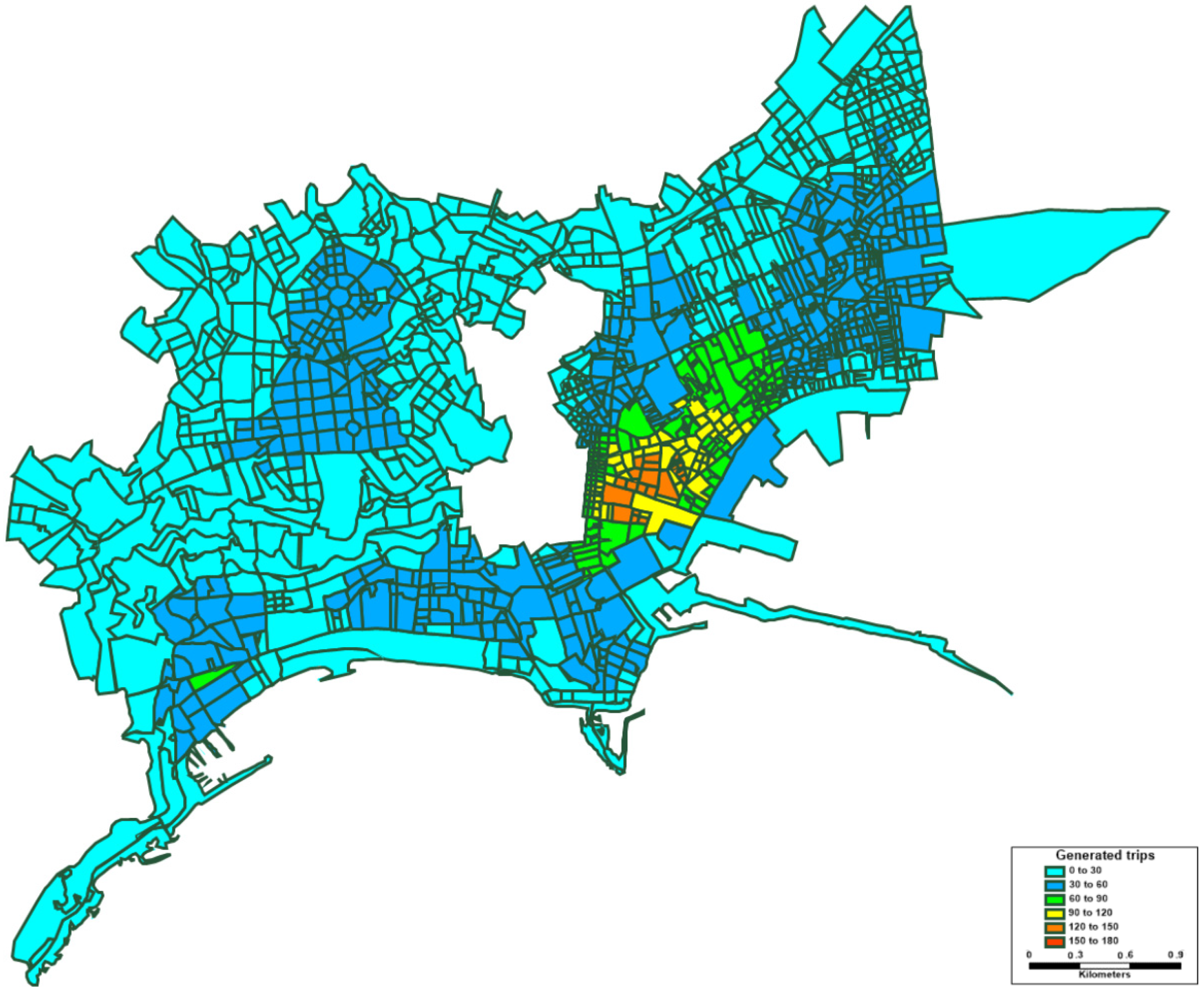
- Day 1 real data are very similar to those of Day 2, as they were similar days in terms of weather conditions, which provides a similar value of trips in terms of both quantity (number of trips) and distribution (trip density).
- The model data reproduce both Day 1 data (calibration data) and Day 2 data (validation data) well, confirming the heat maps’ ability to reproduce the physical phenomenon.
4.2. Comparison among Transport Modes
5. Conclusions and Research Prospects
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ma, H.; Balthasar, F.; Tait, N.; Riera-Palou, X.; Harrison, A. A new comparison between the life cycle greenhouse gas emissions of battery electric vehicles and internal combustion vehicles. Energy Policy 2012, 44, 160–173. [Google Scholar] [CrossRef]
- Brunner, H.; Hirz, M.; Hirschberg, W.; Fallast, K. Evaluation of various means of transport for urban areas. Energy Sustain. Soc. 2018, 8, 9. [Google Scholar] [CrossRef] [Green Version]
- Chester, M.; Horvath, A. Environmental Life-Cycle Assessment of Passenger Transportation: A Detailed Methodology for Energy, Greenhouse Gas and Criteria Pollutant Inventories of Automobiles, Buses, Light Rail, Heavy Rail and Air; Working Paper UCB-ITS-VWP-2008-2; UC Berkeley Center for Future Urban Transport: Berkeley, CA, USA, 2008; Available online: https://escholarship.org/uc/item/5670921q (accessed on 10 June 2021).
- Lents, J.; Canada, M.; Nikkila, N.; Tolvett, S. Measurement of in-Use Passenger Vehicle Emissions in Almaty, Kazakhstan; ISSRC Report; ISSRC: La Habra, CA, USA, 2007; Available online: http://www.issrc.org/ive/downloads/reports/AlmatyKazakhstan2007.pdf (accessed on 10 June 2021).
- Chester, M.V.; Horvath, A. Environmental assessment of passenger transportation should include infrastructure and supply chains. Environ. Res. Lett. 2009, 4, 024008. [Google Scholar] [CrossRef]
- Ntziachristos, L.; Gkatzoflias, D.; Kouridis, C.; Samaras, Z. COPERT: A European road transport emission inventory model. In Information Technologies in Environmental Engineering. Environmental Science and Engineering; Athanasiadis, I.N., Rizzoli, A.E., Mitkas, P.A., Gómez, J.M., Eds.; Springer: Berlin/Heidelberg, Germany, 2009; pp. 491–504. [Google Scholar] [CrossRef]
- Del Pero, F.; Delogu, M.; Pierini, M.; Bonaffini, D. Life Cycle Assessment of a heavy metro train. J. Clean. Prod. 2015, 87, 787–799. [Google Scholar] [CrossRef]
- Girardi, P.; Gargiulo, A.; Brambilla, P.C. A comparative LCA of an electric vehicle and an internal combustion engine vehicle using the appropriate power mix: The Italian case study. Int. J. Life Cycle Assess. 2015, 20, 1127–1142. [Google Scholar] [CrossRef]
- Aly, S.H.; Ramli, M.I. A Development of MARNI 12.2 model: A calculation tool of vehicular emission for heterogeneous traffic conditions. J. Eng. Appl. Sci. 2016, 11, 43–50. [Google Scholar] [CrossRef]
- Kholod, N.; Evans, M.; Gusev, E.; Yu, S.; Malyshev, V.; Tretyakova, S.; Barinov, A. A methodology for calculating transport emissions in cities with limited traffic data: Case study of diesel particulates and black carbon emissions in Murmansk. Sci. Total Environ. 2016, 547, 305–313. [Google Scholar] [CrossRef] [Green Version]
- Jones, H.; Moura, F.; Domingos, T. Life cycle assessment of high-speed rail: A case study in Portugal. Int. J. Life Cycle Assess. 2017, 22, 410–422. [Google Scholar] [CrossRef]
- Mellino, S.; Petrillo, A.; Cigolotti, V.; Autorino, C.; Jannelli, E.; Ulgiati, S. A Life Cycle Assessment of lithium battery and hydrogen-FC powered electric bicycles: Searching for cleaner solutions to urban mobility. Int. J. Hydrogen Energy 2017, 42, 1830–1840. [Google Scholar] [CrossRef]
- Cox, B.L.; Mutel, C.L. The environmental and cost performance of current and future motorcycles. Appl. Energy 2018, 212, 1013–1024. [Google Scholar] [CrossRef]
- Aly, S.H.; Ramli, M.I.; Arifin, Z. Estimation of carbon dioxide emissions on heterogeneous traffic based on metropolitan traffic emissions inventory model. GEOMATE J. 2021, 21, 181–190. [Google Scholar] [CrossRef]
- Mizdrak, A.; Cobiac, L.J.; Cleghorn, C.L.; Woodward, A.; Blakely, T. Fuelling walking and cycling: Human powered locomotion is associated with non-negligible greenhouse gas emissions. Sci. Rep. 2020, 10, 9196. [Google Scholar] [CrossRef] [PubMed]
- Stott, S. How green is cycling? Riding, walking, ebikes and driving ranked. Bikeradar 2020. Available online: https://www.bikeradar.com/features/long-reads/cycling-environmental-impact (accessed on 10 June 2021).
- Handy, S. Want to save tons of greenhouse gases? Bike it. Sci. Clim. 2018. Available online: https://climatechange.ucdavis.edu/what-can-i-do/want-to-save-tons-of-greenhouse-gases-bike-it/ (accessed on 10 June 2021).
- Blondel, B.; Mispelon, C.M.; Fergusin, J. Quantifying CO2 Savings of Cycling; European Cyclists’ Federation Report; ECF: Brussels, Belgium, 2011; Available online: https://ecf.com/system/files/Quantifying%20CO2%20savings%20of%20cycling.pdf (accessed on 10 June 2021).
- Poore, J.; Nemecek, T. Reducing food’s environmental impacts through producers and consumers. Science 2018, 360, 987–992. [Google Scholar] [CrossRef] [Green Version]
- Chandra, S.; Bharti, A.K. Speed distribution curves for pedestrians during walking and crossing. Procedia Soc. Behav. Sci. 2013, 104, 660–667. [Google Scholar] [CrossRef] [Green Version]
- Cherry, C.R.; Weinert, J.X.; Xinmiao, Y. Comparative environmental impacts of electric bikes in China. Transp. Res. Part D 2009, 14, 281–290. [Google Scholar] [CrossRef] [Green Version]
- Bieliński, T.; Ważna, A. Electric scooter sharing and bike sharing user behaviour and characteristics. Sustainability 2021, 12, 9640. [Google Scholar] [CrossRef]
- Boglietti, S.; Barabino, B.; Maternini, G. Survey on e-powered micro personal mobility vehicles: Exploring current issues towards future developments. Sustainability 2021, 12, 3692. [Google Scholar] [CrossRef]
- Shaheen, S.A.; Chan, N. Mobility and the sharing economy: Potential to facilitate the first and last-mile public transit connections. Built Environ. 2016, 42, 573–588. [Google Scholar] [CrossRef]
- Fan, A.; Chen, X.; Wan, T. How have travelers changed mode choices for first/last mile trips after the introduction of bicycle-sharing systems: An empirical study in Beijing, China. J. Adv. Transp. 2019, 2019, 5426080. [Google Scholar] [CrossRef] [Green Version]
- Koen, A. Shared Mobility for the First and Last Mile. Master’s Dissertation, Delft University of Technology, Delft, The Netherlands, 2019. [Google Scholar]
- Kamargianni, M.; Li, W.; Matyas, M.; Schäfer, A. A critical review of new mobility services for urban transport. Transp. Res. Procedia 2016, 14, 3294–3303. [Google Scholar] [CrossRef] [Green Version]
- Jittrapirtom, P.; Caiati, V.; Feneri, A.; Ebrahimigharehbaghi, S.; Gonzàlez, M.J.A.; Narayan, J. Mobility as a Service: A critical review of definitions, assessments of schemes, and key challenges. Urban Plan. 2017, 2, 13–25. [Google Scholar] [CrossRef] [Green Version]
- Arias-Molinares, D.; García-Palomares, J.C. The Ws of MaaS: Understanding mobility as a service from a literature review. IATSS Res. 2020, 44, 253–263. [Google Scholar] [CrossRef]
- Hensher, D.; Mulley, C.; Ho, C.; Wong, Y.; Smith, G.; Nelson, J. Understanding Mobility as A Service (MaaS), 1st ed.; Elsevier: Amsterdam, The Netherlands, 2020. [Google Scholar]
- Arcadis. Assessment on the Environmental Impact of e-Scooters (In French); Arcadis Report; Arcadis–French Division: Paris, France, 2019; Available online: https://www.arcadis.com/fr-fr/actualites/europe/france/2019/11/arcadis-publie-une-etude-sur-l-impact-environnemental-des-trottinettes-electriques-en-free-floating (accessed on 10 June 2021).
- Hollingsworth, J.; Copeland, B.; Johnson, J.X. Are e-scooters polluters? The environmental impacts of shared dockless electric scooters. Environ. Res. Lett. 2019, 14, 084031. [Google Scholar] [CrossRef]
- Moreau, H.; de Meux, L.J.; Zeller, V.; D’Ans, P.; Ruwet, C.; Achten, W.M.J. Dockless e-scooter: A green solution for mobility? Comparative case study between dockless e-scooters, displaced transport, and personal e-scooters. Sustainability 2020, 12, 1803. [Google Scholar] [CrossRef] [Green Version]
- Majumdar, D.; Majumdar, A.; Jash, T. Performance of low speed electric two-wheelers in the urban traffic conditions: A case study in Kolkat. Energy Procedia 2016, 90, 238–244. [Google Scholar] [CrossRef]
- Brennan, J.W.; Barder, T.E. Battery Electric Vehicles vs. Internal Combustion Engine Vehicles; Technical Report; Arthur D Little: Boston, MA, USA, 2016; Available online: https://www.adlittle.com/sites/default/files/viewpoints/ADL_BEVs_vs_ICEVs_FINAL_November_292016.pdf (accessed on 10 June 2021).
- Weiss, M.; Dekker, P.; Moro, A.; Scholz, H.; Patel, M.K. On the electrification of road transportation–A review of the environmental, economic, and social performance of electric two-wheelers. Transp. Res. Part D 2015, 41, 348–366. [Google Scholar] [CrossRef]
- Rajper, S.Z.; Albrecht, J. Prospects of electric vehicles in the developing countries: A literature review. Sustainability 2020, 12, 1906. [Google Scholar] [CrossRef] [Green Version]
- Spreafico, C.; Russo, D. Exploiting the scientific literature for performing life cycle assessment about transportation. Sustainability 2020, 12, 7548. [Google Scholar] [CrossRef]
- Caputo, A. Factors Affecting Atmospheric Emissions of CO2 and Other Greenhouse Gases within the Electricity Industry (In Italian); Technical Report 257/2017; National Institute for Environmental Protection and Research (Italian Acronym: ISPRA): Rome, Italy, 2017. [Google Scholar]
- Fratelli Giacomel. E-mobility: State of Play and Future Trends (In Italian). Available online: https://www.google.it/amp/s/blog.fratelligiacomel.it/futuro-auto-elettriche%3fhs_amp=true (accessed on 10 June 2021).
- Ghosh, A. Possibilities and challenges for the inclusion of the Electric Vehicle (EV) to reduce the carbon footprint in the transport sector: A review. Energies 2020, 13, 2602. [Google Scholar] [CrossRef]
- Enyedi, S. Electric cars: Challenges and trends. In Proceedings of the 2018 IEEE International Conference on Automation, Quality and Testing, Robotics (AQTR 2018), Cluj-Napoca, Romania, 24–26 May 2018; pp. 1–8. [Google Scholar] [CrossRef]
- Sanguesa, J.A.; Torres-Sanz, V.; Garrido, P.; Martinez, F.J.; Marquez-Barja, J.M. A review on electric vehicles: Technologies and challenges. Sustainability 2020, 4, 22. [Google Scholar] [CrossRef]
- Betz, J.; Lienkamp, M. Approach for the development of a method for the integration of battery electric vehicles in commercial companies, including intelligent management systems. Automot. Engine Technol. 2016, 1, 107–117. [Google Scholar] [CrossRef] [Green Version]
- Lovett, M.; Weenink, L.; Harreman, S. Why It’s Time to Transition to an e-LCV Fleet; Lease Plan White Paper; Lease Plan: Amsterdam, The Netherlands, 2020; Available online: https://www.leaseplan.com/corporate/~/media/Files/L/Leaseplan/documents/whitepaper.pdf (accessed on 10 June 2021).
- Zhang, H.; Sheppard, C.J.R.; Lipman, T.E.; Moura, S.J. Joint fleet sizing and charging system planning for autonomous electric vehicles. IEEE Trans. Intell. Transp. Syst. 2020, 21, 4725–4738. [Google Scholar] [CrossRef] [Green Version]
- Sustainable Bus. Fast Charging Stations for Electric Buses Installed in Milan: 170 e-Buses by End 2021. Available online: https://www.sustainable-bus.com/news/fast-charging-station-electric-buses-atm-milano/ (accessed on 10 June 2021).
- Cooney, G.; Hawkins, T.R.; Marriot, J. Life cycle assessment of diesel and electric public transportation buses. J. Ind. Ecol. 2013, 17, 689–699. [Google Scholar] [CrossRef] [Green Version]
- The World Bank. Cost Effectiveness of CO2 Reduction with Hybrid and Electric buses in Developing Countries. Available online: https://thedocs.worldbank.org/en/doc/328621491241260680-0190022017/original/CosteffectivenessCO2reductionhybridandelectricbuses.pdf (accessed on 10 June 2021).
- Garcia, N.; Damask, A. Newton’s Laws. In Physics for Computer Science Students; Springer Study Edition; Springer: New York, NY, USA, 1991. [Google Scholar] [CrossRef]
- Panchenko, V.; Izmailov, A.; Kharchenko, V.; Lobachevskiy, Y. Photovoltaic solar modules of different types and designs for energy supply. Int. J. Energy Optim. Eng. 2020, 9, 74–94. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
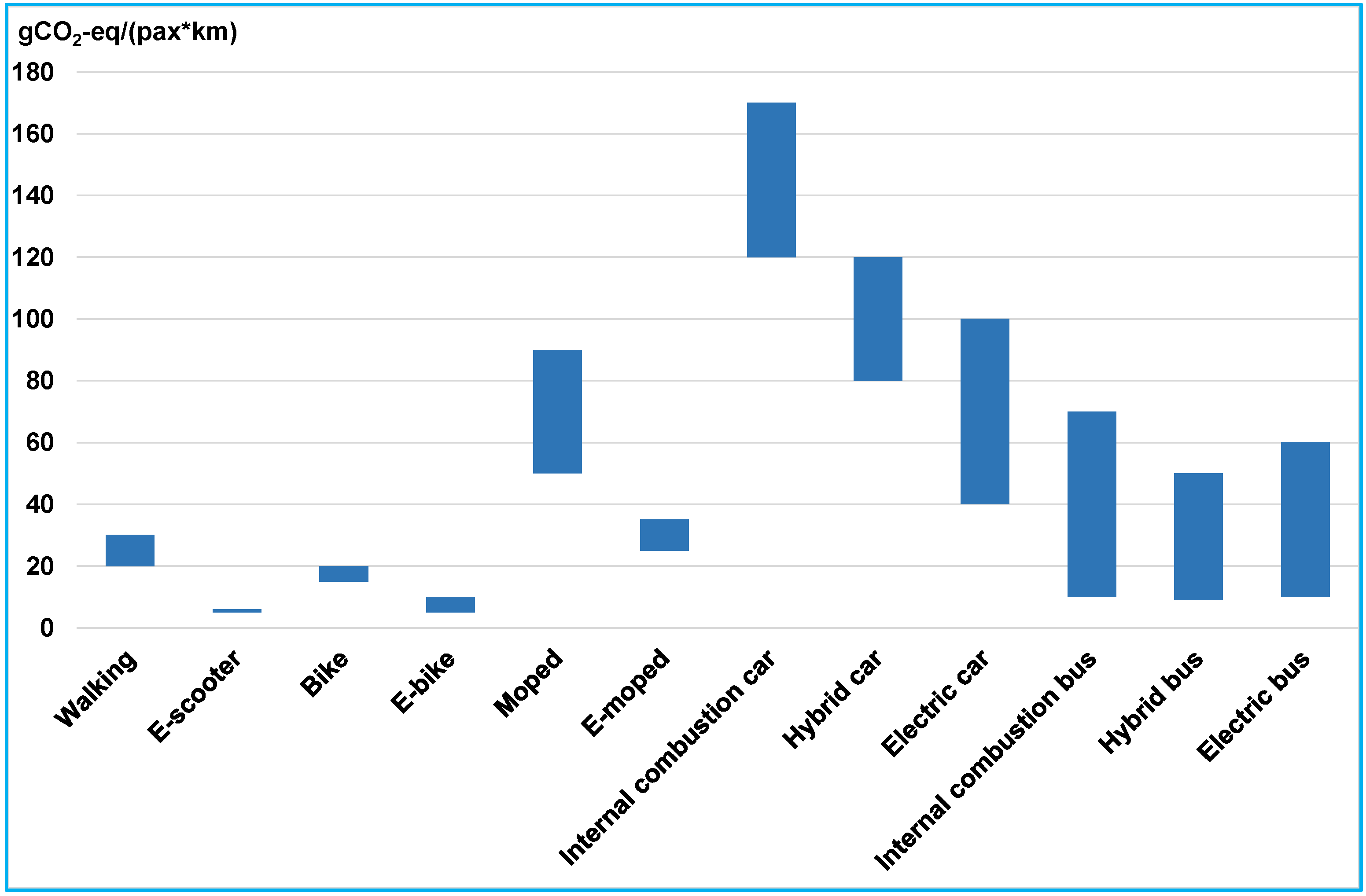
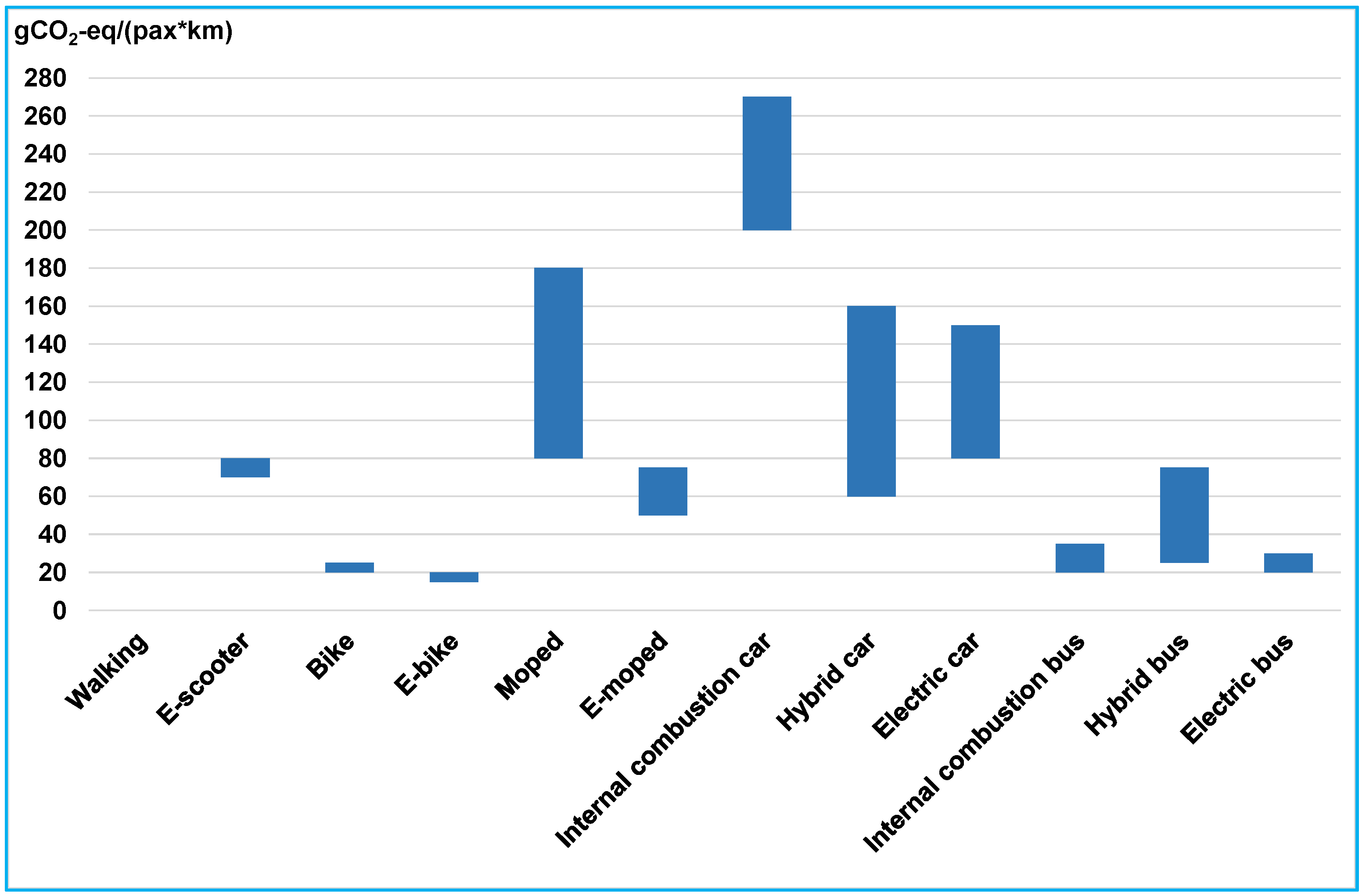
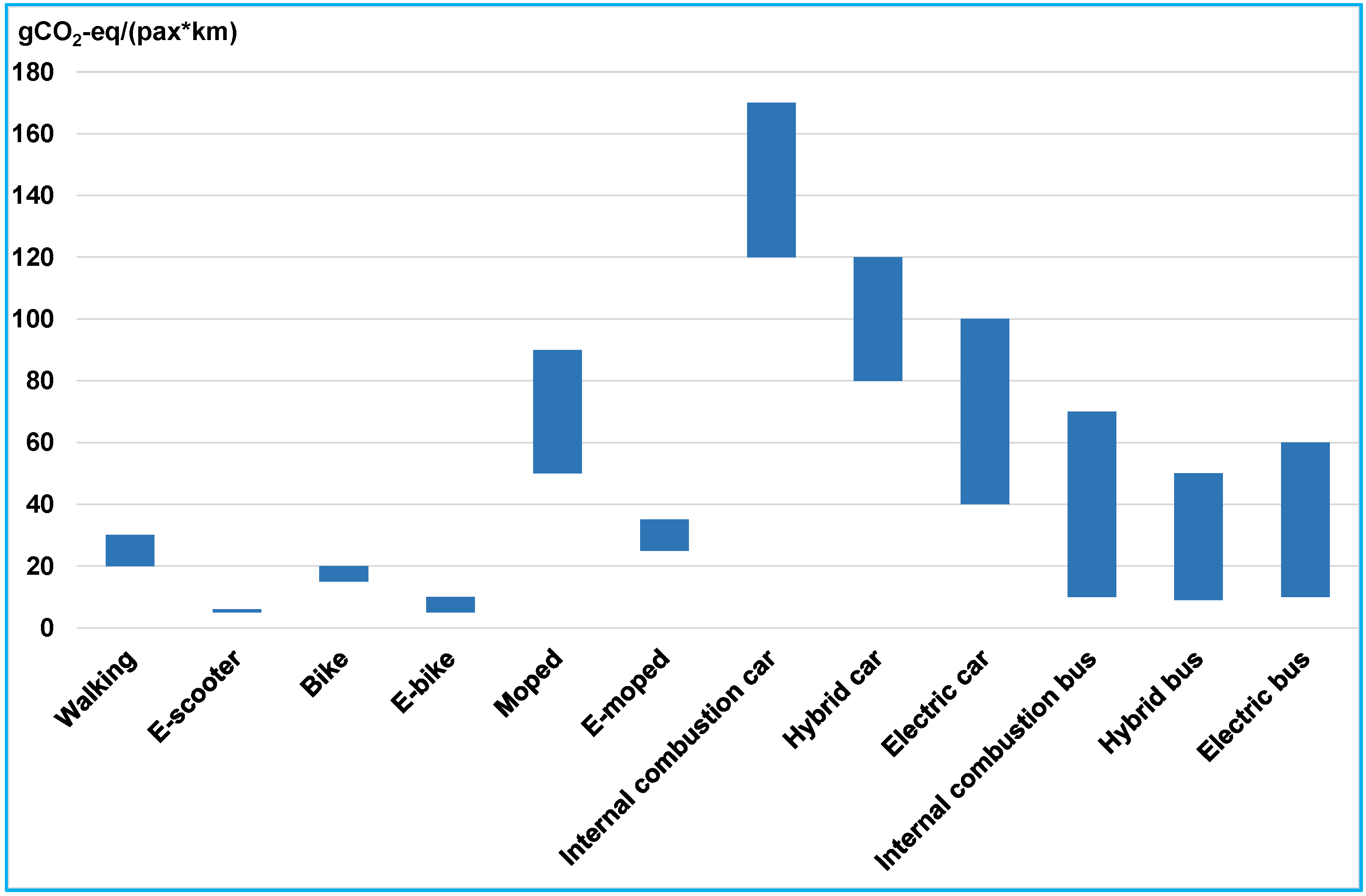
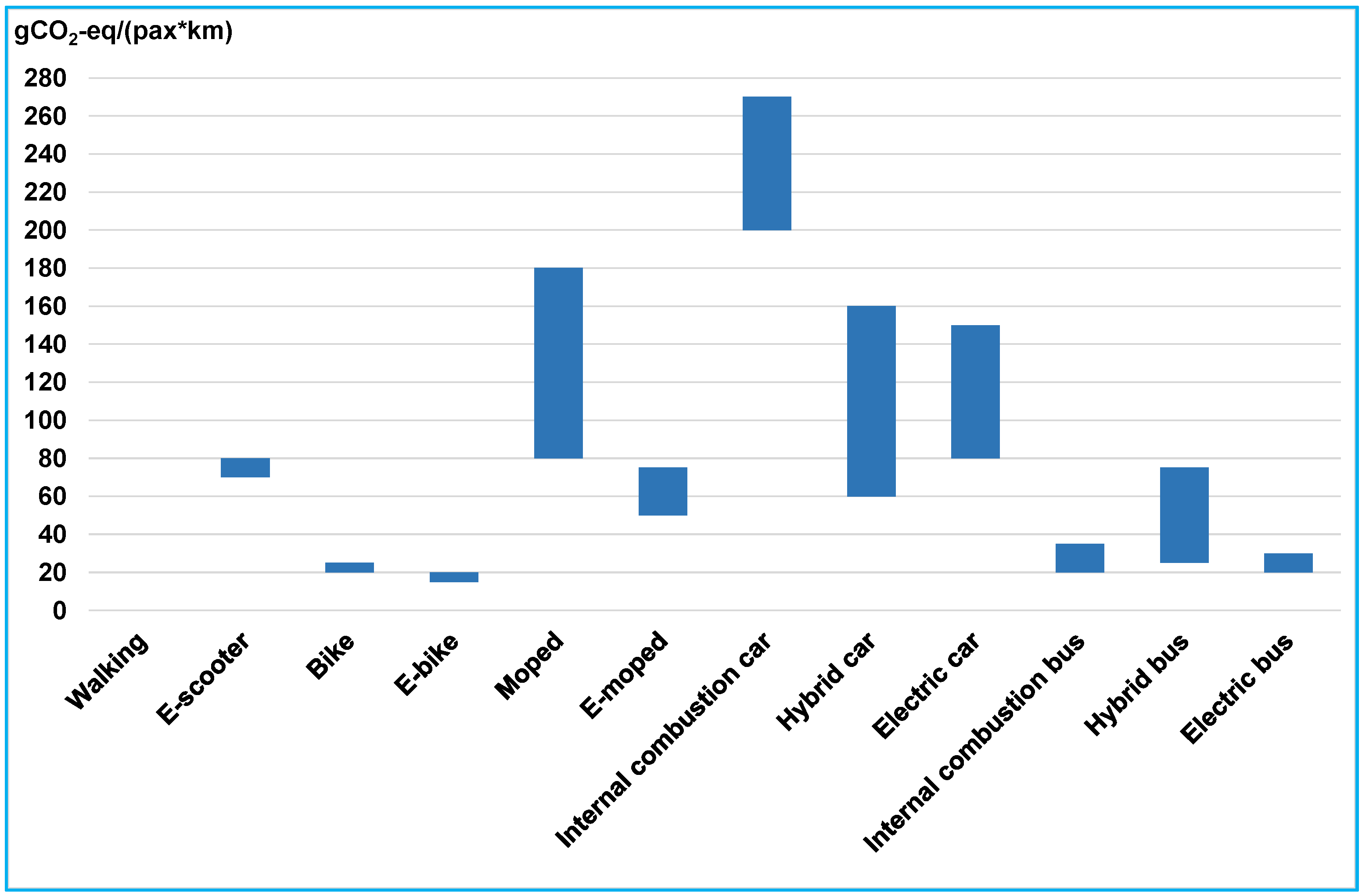
| Transport Mode | Range Values for Unit Emission Factors [gCO2-eq/(pax*km)] | |
|---|---|---|
| Use Phase | Life Cycle Assessment (LCA) | |
| Walking | [20–30] | – |
| E-scooter | [5–6] | [70–80] |
| Bike | [15–20] | [20–25] |
| E-bike | [5–10] | [15–20] |
| Moped | [50–90] | [80–180] |
| E-moped | [25–35] | [50–75] |
| Internal combustion car | [120–170] | [200–270] |
| Hybrid car | [80–120] | [60–160] |
| Electric car | [40–100] | [80–150] |
| Internal combustion bus | [10–70] | [20–35] |
| Hybrid bus | [9–50] | [25–75] |
| Electric bus | [10–60] | [20–30] |
| Calibration Task (Day 1 Data) | Validation Task (Day 2 Data) | |||||||
|---|---|---|---|---|---|---|---|---|
| Parameter | Value | t–Value | Threshold | Confidence Level | t–Value | Threshold | Confidence Level | |
| Parameter tests | α1 | +0.00171016 | 9.59 | 2.21 | 94.5% | 8.73 | 2.21 | 94.5% |
| α2 | +0.00759030 | 49.89 | 2.21 | 94.5% | 45.41 | 2.21 | 94.5% | |
| α3 | –0.00564263 | 2.24 | 2.21 | 94.5% | 2.04 | 2.21 | 94.5% | |
| Test Name | Value | Threshold | Confidence Level | Value | Threshold | Confidence Level | ||
| Function tests | R2 | 0.577 | - | - | 0.592 | - | - | |
| R2adj | 0.576 | - | - | 0.591 | - | - | ||
| F–test | 776.8 | 5.94 | 99.9% | 641.9 | 5.94 | 99.9% | ||
| Calibration Task (Day 1 Data) | Validation Task (Day 2 Data) | |||||||
|---|---|---|---|---|---|---|---|---|
| Parameter | Value | t–Value | Threshold | Confidence level | t–Value | Threshold | Confidence level | |
| Parameter tests | β1 | +0.00164309 | 9.34 | 2.21 | 94.5% | 8.52 | 2.21 | 94.5% |
| β2 | +0.00792477 | 52.79 | 2.21 | 94.5% | 48.13 | 2.21 | 94.5% | |
| β3 | −0.00708747 | 2.85 | 2.21 | 94.5% | 2.60 | 2.21 | 94.5% | |
| Test Name | Value | Threshold | Confidence Level | Value | Threshold | Confidence Level | ||
| Function tests | R2 | 0.612 | - | - | 0.597 | - | - | |
| R2adj | 0.611 | - | - | 0.597 | - | - | ||
| F–test | 883.1 | 5.94 | 99.9% | 731.0 | 5.94 | 99.9% | ||
| Calibration Task (Day 1 Data) | Validation Task (Day 2 Data) | |||||||
|---|---|---|---|---|---|---|---|---|
| Parameter | Value | t-Value | Threshold | Confidence level | t-Value | Threshold | Confidence Level | |
| Parameter tests | γ1 | +0.00335325 | 9.59 | 2.21 | 94.5% | 8.73 | 2.21 | 94.5% |
| γ2 | +0.01551506 | 51.99 | 2.21 | 94.5% | 47.30 | 2.21 | 94.5% | |
| γ3 | −0.01273010 | 2.57 | 2.21 | 94.5% | 2.34 | 2.21 | 94.5% | |
| Test name | Value | Threshold | Confidence Level | Value | Threshold | Confidence Level | ||
| Function tests | R2 | 0.602 | - | - | 0.604 | - | - | |
| R2adj | 0.602 | - | - | 0.603 | - | - | ||
| F-test | 850.0 | 5.94 | 99.9% | 701.3 | 5.94 | 99.9% | ||
| Transport Mode | Life Cycle Assessment | |||
|---|---|---|---|---|
| Day 1 | Day 2 | |||
| Total Emissions [gCO2-eq] | Percentage Variation [%] | Total Emissions [gCO2-eq] | Percentage Variation [%] | |
| Walking | ||||
| E-scooter | 180.83 | 100% | 193.76 | 100% |
| Bike | 54.25 | 30% | 58.13 | 30% |
| E-bike | 42.19 | 23% | 45.21 | 23% |
| Moped | 313.43 | 173% | 335.85 | 173% |
| E-moped | 150.69 | 83% | 161.47 | 83% |
| Internal combustion car | 566.59 | 313% | 607.11 | 313% |
| Hybrid car | 265.21 | 147% | 284.18 | 147% |
| Electric car | 277.27 | 153% | 297.10 | 153% |
| Internal combustion bus | 66.30 | 37% | 71.05 | 37% |
| Hybrid bus | 120.55 | 67% | 129.17 | 67% |
| Electric bus | 60.28 | 33% | 64.59 | 33% |
| Transport Mode | Use Phase | |||
|---|---|---|---|---|
| Day 1 | Day 2 | |||
| Total Emissions [gCO2-eq] | Percentage Variation [%] | Total Emissions [gCO2-eq] | Percentage Variation [%] | |
| Walking | 57.87 | 436% | 62.00 | 436% |
| E-scooter | 13.26 | 100% | 14.21 | 100% |
| Bike | 42.19 | 318% | 45.21 | 318% |
| E-bike | 18.08 | 136% | 19.38 | 136% |
| Moped | 168.77 | 1273% | 180.84 | 1273% |
| E-moped | 72.33 | 545% | 77.50 | 545% |
| Internal combustion car | 349.60 | 2636% | 374.60 | 2636% |
| Hybrid car | 241.10 | 1818% | 258.35 | 1818% |
| Electric car | 168.77 | 1273% | 180.84 | 1273% |
| Internal combustion bus | 96.44 | 727% | 103.34 | 727% |
| Hybrid bus | 71.13 | 536% | 76.21 | 536% |
| Electric bus | 84.39 | 636% | 90.42 | 636% |
| Transport Mode | Externalities Cost [€] | User-Generalised Cost [€] | Total Cost [€] | Percentage Variation [%] |
|---|---|---|---|---|
| Walking | 23.67 | 3013.79 | 3037.46 | 185% |
| E-scooter | 5.42 | 1636.18 | 1641.60 | 100% |
| Bike | 17.26 | 1205.52 | 1222.78 | 74% |
| E-bike | 7.40 | 1636.18 | 1643.58 | 100% |
| Moped | 69.04 | 1865.02 | 1934.06 | 118% |
| E-moped | 29.59 | 1865.02 | 1894.61 | 115% |
| Internal combustion car | 143.01 | 8487.01 | 8630.03 | 526% |
| Hybrid car | 98.63 | 8487.01 | 8585.65 | 523% |
| Electric car | 69.04 | 8487.01 | 8556.05 | 521% |
| Internal combustion bus | 39.45 | 5611.10 | 5650.55 | 344% |
| Hybrid bus | 29.10 | 5611.10 | 5640.19 | 344% |
| Electric bus | 34.52 | 5611.10 | 5645.62 | 344% |
| Transport Mode | Mass [kg] | Service Life [years] | Im [kg/year] | I′m [kg/year*pax] |
|---|---|---|---|---|
| E-scooter | 16 | 2 | 8 | 8 |
| Bike | 15 | 15 | 1 | 1 |
| E-bike | 25 | 5 | 5 | 5 |
| Moped | 150 | 6 | 25 | 22.73 |
| E-moped | 150 | 6 | 25 | 22.73 |
| Internal combustion car | 900 | 15 | 60 | 46.15 |
| Hybrid car | 900 | 15 | 60 | 46.15 |
| Electric car | 900 | 10 | 90 | 69.23 |
| Internal combustion bus | 15,000 | 15 | 1000 | 12.5 |
| Hybrid bus | 15,000 | 15 | 1000 | 12.5 |
| Electric bus | 15,000 | 10 | 1500 | 18.75 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
D’Acierno, L.; Tanzilli, M.; Tescione, C.; Pariota, L.; Di Costanzo, L.; Chiaradonna, S.; Botte, M. Adoption of Micro-Mobility Solutions for Improving Environmental Sustainability: Comparison among Transportation Systems in Urban Contexts. Sustainability 2022, 14, 7960. https://doi.org/10.3390/su14137960
D’Acierno L, Tanzilli M, Tescione C, Pariota L, Di Costanzo L, Chiaradonna S, Botte M. Adoption of Micro-Mobility Solutions for Improving Environmental Sustainability: Comparison among Transportation Systems in Urban Contexts. Sustainability. 2022; 14(13):7960. https://doi.org/10.3390/su14137960
Chicago/Turabian StyleD’Acierno, Luca, Matteo Tanzilli, Chiara Tescione, Luigi Pariota, Luca Di Costanzo, Salvatore Chiaradonna, and Marilisa Botte. 2022. "Adoption of Micro-Mobility Solutions for Improving Environmental Sustainability: Comparison among Transportation Systems in Urban Contexts" Sustainability 14, no. 13: 7960. https://doi.org/10.3390/su14137960
APA StyleD’Acierno, L., Tanzilli, M., Tescione, C., Pariota, L., Di Costanzo, L., Chiaradonna, S., & Botte, M. (2022). Adoption of Micro-Mobility Solutions for Improving Environmental Sustainability: Comparison among Transportation Systems in Urban Contexts. Sustainability, 14(13), 7960. https://doi.org/10.3390/su14137960