
A Survey on Mixed Traffic Flow Characteristics in Connected Vehicle Environments


Abstract
:1. Introduction
2. Overview of Traffic Flow in Connected Vehicle Environments
2.1. The Development Situation and Trend of Connected Vehicle Technologies
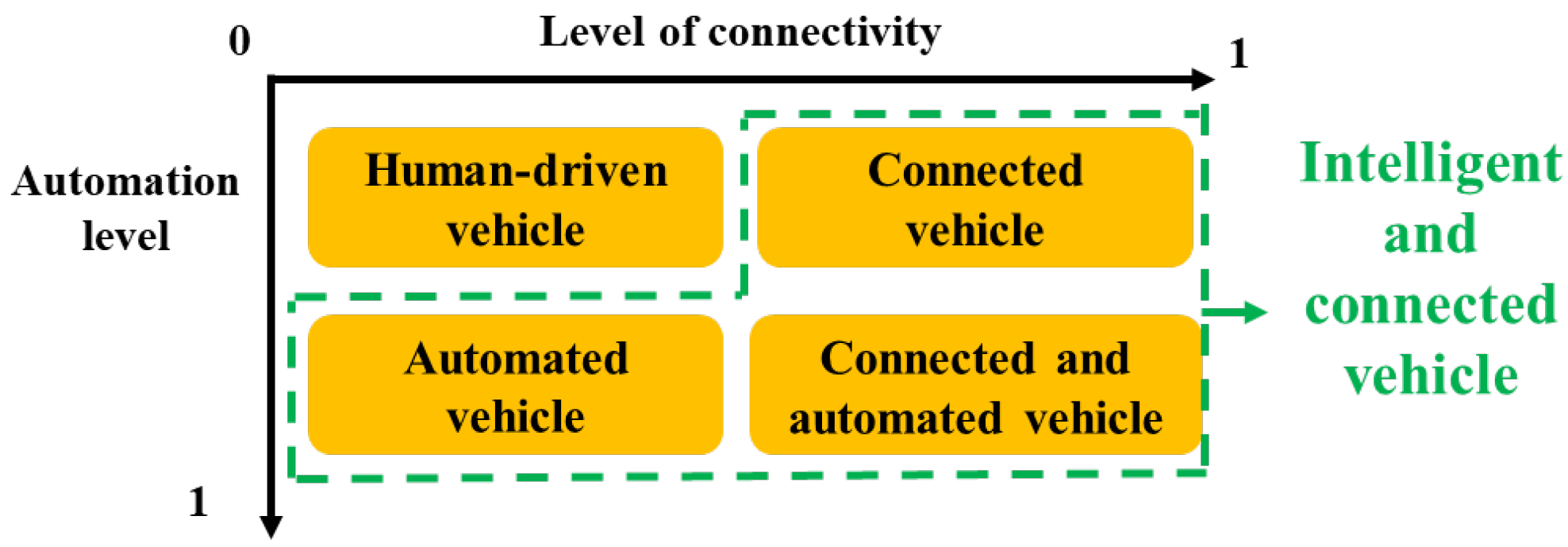
2.2. Related Definitions
- Intelligent transportation system (ITS)
- Intelligent cooperative vehicle infrastructure system
- Advanced traffic management system
- Intelligent road network
- Intelligent connected vehicle
- Mixed traffic flow
3. Traffic Flow Models for Mixed Traffic Flow
3.1. Microscopic Traffic Flow Models
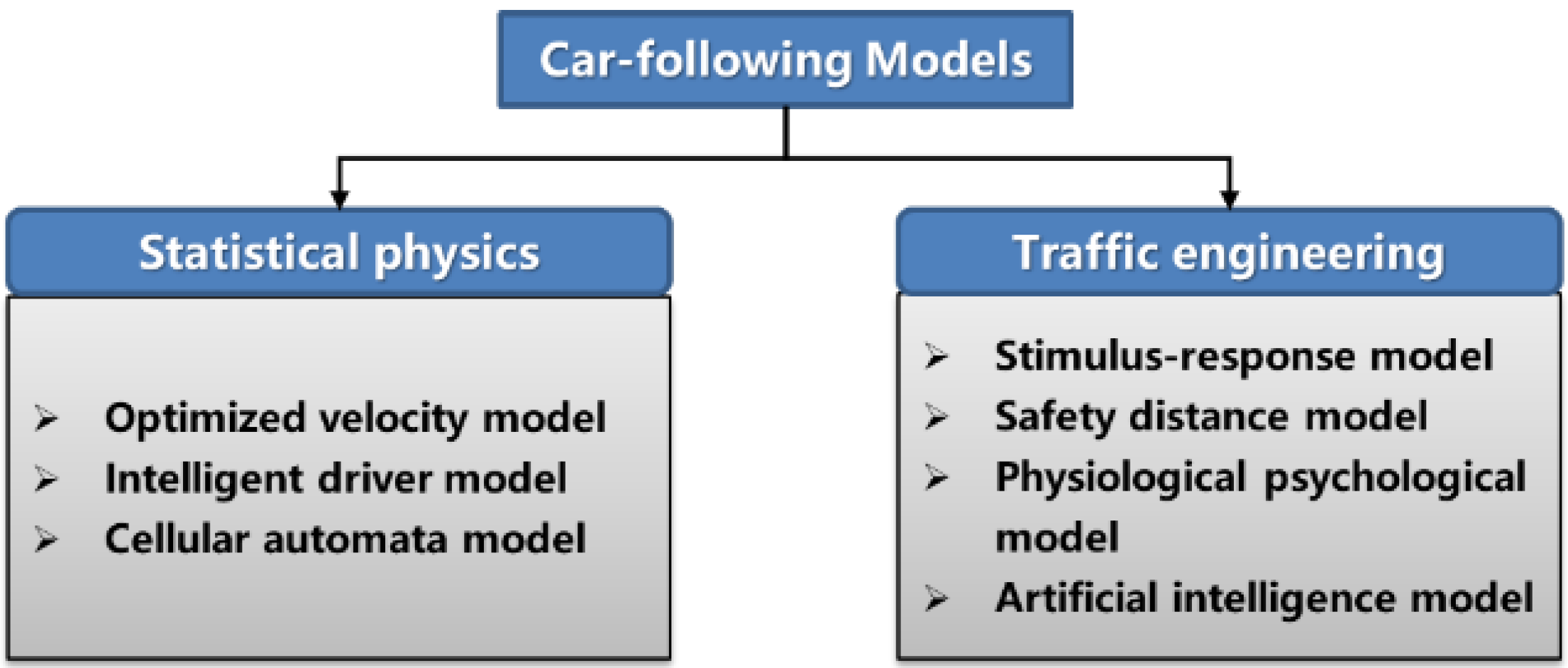
3.1.1. Car-Following Model
- (1)
3.1.2. Car Following Models under Intelligent Connected Vehicle Environment
3.1.3. Lane-Changing Model
3.2. Macroscopic Traffic Flow Models
4. Methodology of Characteristics of Analysis for Mixed Traffic Flow
4.1. Numerical Simulation Analysis Method
4.2. Simulation Experiment in a Software Virtual Environment
4.3. Driving Simulator-Based Simulation Experiment
4.4. Naturalistic Driving Data-Based Statistical Analysis Method
5. Lane-Management Methods for Mixed Traffic Flow
5.1. Speed Control Optimization Methods
5.2. Optimization Methods of Dedicated Lane-Management Strategy
6. Conclusions and Prospects
Author Contributions
Funding
Conflicts of Interest
References
- Siegel, J.E.; Erb, D.C.; Sarma, S.E. A Survey of the Connected Vehicle Landscape—Architectures, Enabling Technologies, Applications, and Development Areas. IEEE Trans. Intell. Transp. Syst. 2018, 19, 2391–2406. [Google Scholar] [CrossRef] [Green Version]
- Rios-Torres, J.; Malikopoulos, A.A. A survey on the coordination of connected and automated vehicles at intersections and merging at highway on-ramps. IEEE Trans. Intell. Transp. Syst. 2017, 18, 1066–1077. [Google Scholar] [CrossRef]
- Dong-Fan, X.; Xiao-Mei, Z.; Zhengbing, H. Heterogeneous Traffic Mixing Regular and Connected Vehicles: Modeling and Stabilization. IEEE Trans. Intell. Transp. Syst. 2018, 20, 2060–2071. [Google Scholar]
- Milakis, D.; Van Arem, B.; Van Wee, B. Policy and society related implications of automated driving: A review of literature and directions for future research. J. Intell. Transp. Syst. Technol. Plan. Oper. 2015, 21, 324–348. [Google Scholar] [CrossRef]
- Amadeo, M.; Campolo, C.; Molinaro, A. Information-centric networking for connected vehicles: A survey and future perspectives. IEEE Commun. Mag. 2016, 54, 98–104. [Google Scholar] [CrossRef]
- Parent, M.; Gallais, G. Intelligent transportation in cities with CTS. In Proceedings of the IEEE 5th International Conference on Intelligent Transportation Systems, Singapore, 6 September 2003. [Google Scholar]
- Campbell, K.L. Detailed Planning for Research on Making a Significant Improvement in Highway Safety; Transportation Research Board: Washington, DC, USA, 2003. [Google Scholar]
- Available online: https://www.intellidriveusa.org/ (accessed on 4 April 2010).
- Nadeem, T.; Dashtinezhad, S.; Liao, C.; Iftode, L. TrafficView: Traffic Data Dissemination using Car-to-Car Communiction. ACM SIGMOBILE Mob. Comput. Commun. Rev. 2004, 8, 6–19. [Google Scholar] [CrossRef]
- Available online: http://www.path.berkeley.edu/Research/Safety-Ops.htm (accessed on 1 January 2016).
- Shladover, S.E.; Su, D.; Lu, X.Y. Impacts of Cooperative Adaptive Cruise Control on Freeway Traffic Flow. Transp. Res. Rec. 2012, 2324, 63–70. [Google Scholar] [CrossRef] [Green Version]
- Milanés, V.; Shladover, S.E. Modeling cooperative and autonomous adaptive cruise control dynamic responses using experimental data. Transp. Res. Part C Emerg. Technol. 2014, 48, 285–300. [Google Scholar] [CrossRef] [Green Version]
- Morioka, Y.; Sota, T.; Nakagawa, M. An anti-car collision system using GPS and 5.8 GHz inter-vehicle communication at an off-sight intersection[C]// IEEE VTS Fall VTC2000. Proccedings of the 52nd Vehicular Technology Conference (Cat. No.00CH37152), Bostong, MA, USA, 24–28 September 2000; IEEE: Piscataway, NJ, USA, 2000. [Google Scholar]
- Toulminet, G.; Boussuge, J.; Laurgeau, C. Comparative synthesis of the 3 main European projects dealing with Cooperative Systems (CVIS, SAFESPOT and COOPERS) and description of COOPERS Demonstration Site 4. In Proceedings of the 2008 11th International IEEE Conference on Intelligent Transportation Systems, Beijing, China, 12–15 October 2008; IEEE: Piscataway, NJ, USA, 2008; pp. 809–814. [Google Scholar]
- Maiti, S.; Winter, S.; Kulik, L. A conceptualization of vehicle platoons and platoon operations. Transp. Res. Part C Emerg. Technol. 2017, 80, 1–19. [Google Scholar] [CrossRef]
- Jia, D.; Lu, K.; Wang, J.; Zhang, X.; Shen, X. A survey on platoon-based vehicular cyber-physical systems. IEEE Commun. Surv. Tutor. 2016, 18, 263–284. [Google Scholar] [CrossRef] [Green Version]
- Hall, R.; Chin, C. Vehicle sorting for platoon formation: Impacts on highway entry and throughput. Transp. Res. Part C Emerg. Technol. 2005, 13, 405–420. [Google Scholar] [CrossRef]
- Brackstone, M.; Mcdonald, M. Car-following: A historical review. Transp. Res. Part F Traffic Psychol. Behav. 1999, 2, 181–196. [Google Scholar] [CrossRef]
- Chandler, R.E.; Herman, R.; Montroll, E.W. Traffic dynamics: Studies in car following. Oper. Res. 1958, 6, 165–184. [Google Scholar] [CrossRef] [Green Version]
- Gazis, D.C.; Herman, R.; Rothery, R.W. Nonlinear Follow-the-Leader Models of Traffic Flow. Oper. Res. 1961, 6, 165–184. [Google Scholar] [CrossRef]
- Newell, G.F. Nonlinear Effects in the Dynamics of Car Following. Oper. Res. 1961, 9, 209–229. [Google Scholar] [CrossRef]
- Nagatani, T. Traffic behavior in a mixture of different vehicles. Phys. A Statal Mech. Appl. 2000, 284, 405–420. [Google Scholar] [CrossRef]
- Yang, Q.I.; Koutsopoulos, H.N. A Microscopic Traffic Simulator for evaluation of dynamic traffic management systems. Transp. Res. C 1996, 4, 113–129. [Google Scholar] [CrossRef]
- Lee, G. A Generalization of Linear Car-Following Theory. Oper. Res. 1966, 14, 595–606. [Google Scholar] [CrossRef]
- Kometani, S. Dynamic behavior of traffic with a nonlinear spacing-speed relationship. Theory Traffic Flow 1959, 105–119. Available online: https://ci.nii.ac.jp/naid/10004835989/ (accessed on 15 May 2022).
- Gipps, P.G. A behavioural car-following model for computer simulation. Transp. Res. Part B 1981, 15, 105–111. [Google Scholar] [CrossRef]
- Benekohal, R.F.; Treiterer, J. Car-following model for simulation of traffic in normal and stop-and-go conditions. Transp. Res. Rec. 1988, 1194, 99–111. [Google Scholar]
- Sengupta, R.; Rezaei, S.; Shladover, S.E.; Cody, D.; Dickey, S.; Krishnan, H. Cooperative Collision Warning Systems: Concept Definition and Experimental Implementation. J. Intell. Transp. Syst. 2007, 11, 143–155. [Google Scholar] [CrossRef]
- Michaels, R.M. Perceptual factors in car following. In Proceedings of the Second International Symposium on the Theory of Traffic Flow, London, UK, 25 June 1963. [Google Scholar]
- Wiedemarm, R. Simulation of Road Traffic in Traffic Flow; University of Karlsruhe: Karlsruhe, Germany, 1974. [Google Scholar]
- Jia, H.F.; Juan, Z.C.; Wang, X.Y. Car-following model based on fuzzy inference system. Transportation Research Record. 2001. Available online: https://onlinepubs.trb.org/Onlinepubs/trr/1992/1365/1365.pdf#page=86 (accessed on 15 May 2022).
- Wang, Z.; Siwen, J.; Zhang, L. Developing a car-following model with consideration of driver’s behavior based on an Adaptive Neuro-Fuzzy Inference System. J. Intell. fuzzy Syst. Appl. Eng. Technol. 2016, 30, 461–466. [Google Scholar] [CrossRef]
- Bando, M.; Hasebe, K.; Nakayama, A.; Shibata, A.; Sugiyama, Y. Dynamical model of traffic congestion and numerical simulation. Phys. Rev. E 1995, 51, 1035–1042. [Google Scholar] [CrossRef] [PubMed]
- Helbing, D.; Tilch, B. Generalized force model traffic dynamics. Phys. Rev. E 1998, 58, 133–138. [Google Scholar] [CrossRef] [Green Version]
- Jiang, R.; Wu, Q.; Zhu, Z. Full velocity difference model for a car-following theory. Phys. Rev. E. Stat. Nonlinear Soft Matter Phys. 2001, 64, 017101/1–017101/4. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Treiber, M.; Kesting, A.; Helbing, D. Delays, inaccuracies and anticipation in microscopic traffic models. Phys. A Stat. Mech. Appl. 2006, 360, 71–88. [Google Scholar] [CrossRef]
- Treiber, M.; Hennecke, A.; Helbing, D. Congested traffic states in empirical observations and microscopic simulations. Phys. Rev. E. Stat. Physics Plasmas Fluids Relat. Interdiscip. Top. 2000, 62, 1805–1824. [Google Scholar] [CrossRef] [Green Version]
- Qin, Y.; Wang, H.; Ran, B. Impact of Connected and Automated Vehicles on Passenger Comfort of Traffic Flow with Vehicle-to-vehicle Communications. Ksce J. Civ. Eng. 2019, 23, 821–832. [Google Scholar] [CrossRef]
- Cremer, M.; Ludwig, J. A fast simulation model for traffic flow on the basis of boolean operations. Math. Comput. Simul. 2014, 28, 297–303. [Google Scholar] [CrossRef]
- Wolfram, S. Statistical mechanics of cellular automata. Rev. Mod. Phys. 1983, 55, 601–644. [Google Scholar] [CrossRef]
- Nagel, K.; Schreckenberg, M. A cellular automaton model for freeway traffic. J. Phys. I 1992, 2, 2221–2229. [Google Scholar] [CrossRef]
- Benjamin, S.C.; Johnson, N.F.; Hui, P.M. Cellular automata models of traffic flow along a highway containing a junction. J. Phys. A Gen. Phys. 1996, 29, 3119–3127. [Google Scholar] [CrossRef] [Green Version]
- Barlovic, R.; Santen, L.; Schadschneider, A.; Schreckenberg, M. Metastable states in cellular automata for traffic flow. Eur. Phys. J. B-Condens. Matter Complex Syst. 1998, 5, 793–800. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Wu, Q.; Jiang, R. Cellular automaton model considering the velocity effect of a car on the successive car. Phys. Rev. E Stat. Nonlin. Soft Matter Phys. 2001, 64, 66128. [Google Scholar] [CrossRef]
- Nagatani, T. Self-organization and phase transition in traffic-flow model of a two-lane roadway. J. Phys. A Math. Gen. 1993, 26, L781–L787. [Google Scholar] [CrossRef]
- Chai, R. Research on Driving Behavior Characteristics under Connected Vehicle Environment; Beijing Institute of Technology: Beijing, China, 2016. [Google Scholar]
- Kimber, R. Gap-Acceptance and Empiricism in Capacity Prediction. Transp. Sci. 1989, 23, 100–111. [Google Scholar] [CrossRef]
- Gipps, P.G. A model for the structure of lane-changing decision. Transp. Res. Part B Methodol. 1986, 20, 403–414. [Google Scholar] [CrossRef]
- Li, L.; Wang, F.Y.; Kim, H. Cooperative driving and lane changing at blind crossings. In Proceedings of the IEEE Intelligent Vehicles Symposium, Las Vegas, NV, USA, 6–8 June 2005. [Google Scholar]
- Gu, G. Intelligent Vehicle Collaborative Lane Change Trajectory Planning Considering Driving Characteristics; South China University of Technology: Guangzhou, China, 2018. [Google Scholar]
- Schubert, R.; Schulze, K.; Wanielik, G. Situation Assessment for Automatic Lane-Change Maneuvers. IEEE Trans. Intell. Transp. Syst. 2010, 11, 607–616. [Google Scholar] [CrossRef]
- Ulbrich, S.; Maurer, M. Situation Assessment in Tactical Lane Change Behavior Planning for Automated Vehicles. In Proceedings of the IEEE International Conference on Intelligent Transportation Systems, Gran Canaria, Spain, 15–18 September 2015. [Google Scholar]
- Li, L.; Gan, J.; Zhou, K.; Qu, X.; Ran, B. A novel lane-changing model of connected and automated vehicles: Using the safety potential field theory. Phys. A Statal Mech. Appl. 2020, 559, 125039. [Google Scholar] [CrossRef]
- Richards, P.I. Shock Waves on the Highway. Oper. Res. 1956, 4, 42–51. [Google Scholar] [CrossRef]
- Lighthill, M.J.; Whitham, G.B. On Kinematic Waves. II. A Theory of Traffic Flow on Long Crowded Roads. Proc. R. Soc. A Math. Phys. Eng. Sci. 1955, 229, 317–345. [Google Scholar]
- Daganzo, C.F. A continuum theory of traffic dynamics for freeways with special lanes. Transp. Res. Part B Methodol. 1997, 31, 83–102. [Google Scholar] [CrossRef]
- Daganzo, C.F. A behavioral theory of multi-lane traffic flow. Part I: Long homogeneous freeway sections. Transp. Res. Part B Methodol. 2002, 36, 131–158. [Google Scholar] [CrossRef] [Green Version]
- Qian, Z.; Li, J.; Li, X.; Zhang, M.; Wang, H. Modeling heterogeneous traffic flow: A pragmatic approach. Transp. Res. Part B Methodol. 2017, 99, 183–204. [Google Scholar] [CrossRef]
- Ngoduy, D.; Jia, D. Multi anticipative bidirectional macroscopic traffic model considering cooperative driving strategy. Transp. B Transp. Dyn. 2016, 5, 100–114. [Google Scholar] [CrossRef]
- Ngoduy, D. Application of gas-kinetic theory to modelling mixed traffic of manual and ACC vehicles. Transportmetrica 2012, 8, 43–60. [Google Scholar] [CrossRef]
- Qin, Y.-Y.; Wang, H.; Ran, B. Car-following Model of Connected and Autonomous Vehicles Considering Multiple Feedbacks. J. Transp. Syst. Eng. Inf. Technol. 2018, 18, 48–54. [Google Scholar]
- Qin, Y.-Y.; Wang, H.; Wang, W.; Ni, D.-H. Review of car-following models of adaptive cruise control. J. Traffic Transp. Eng. 2017, 17, 121–130. [Google Scholar]
- Qin, Y.; Wang, H.; Ran, B. Stability analysis of connected and automated vehicles to reduce fuel consumption and emissions. J. Transp. Eng. Part A Syst. 2018, 144, 04018068. [Google Scholar] [CrossRef]
- Qin, Y.-Y.; Wang, H.; Wang, W. LWR Model for Mixed Traffic Flow in Connected and Autonomous Vehicular Environments. Chin. J. Highw. Transp. 2018, 31, 147–156. [Google Scholar]
- Qin, Y.; Wang, H.; Wang, W. Analysis on stability and safety for mixed traffic flow with connected auxiliary driving. J. Southeast Univ. Nat. Sci. 2018, 48, 188–194. [Google Scholar]
- Ran, B.; Tsao, H.-S.J. Traffic Flow Analysis for an Automated Highway System. 1996. Available online: https://journals.sagepub.com/doi/10.3141/1588-18 (accessed on 15 May 2022).
- Vander Werf, J.; Shladover, S.E.; Miller, M.A.; Kourjanskaia, N. Effects of adaptive cruise control systems on highway traffic flow capacity. Transp. Res. Rec. J. Transp. Res. Board 2002, 1800, 78–84. [Google Scholar] [CrossRef]
- Talebpour, A.; Mahmassani, H.S. Influence of connected and autonomous vehicles on traffic flow stability and throughput. Transp. Res. Part C Emerg. Technol. 2016, 71, 143–163. [Google Scholar] [CrossRef]
- Chang, X.; Li, H.; Qin, L.; Rong, J.; Lu, Y.; Chen, X. Evaluation of cooperative systems on driver behavior in heavy fog condition based on a driving simulator. Accid. Anal. Prev. 2019, 128, 197–205. [Google Scholar] [CrossRef]
- Chang, X.; Li, H.; Rong, J.; Zhao, X.; Wang, Y. Analysis of Capacity for Mixed Traffic Flow with Connected Vehicle Platoon on Freeway. J. South China Univ. Technol. Nat. Sci. 2020, 48, 142–148. [Google Scholar]
- Chang, X.; Li, H.; Rong, J.; Qin, L.; Yang, Y. Analysis on fundamental diagram model for mixed traffic flow with connected vehicle platoons. J. Southeast Univ. Nat. Sci. 2020, 50, 782–788. [Google Scholar]
- Ye, L.; Yamamoto, T. Modeling connected and autonomous vehicles in heterogeneous traffic flow. Phys. A Stat. Mech. Appl. 2018, 490, 269–277. [Google Scholar] [CrossRef]
- Chen, D.; Ahn, S.; Chitturi, M.; Noyce, D.A. Towards vehicle automation: Roadway capacity formulation for traffic mixed with regular and automated vehicles. Transp. Res. Part B Methodol. 2017, 100, 196–221. [Google Scholar] [CrossRef] [Green Version]
- Pavle, B.; Taylor, L. Capacity Predictions and Capacity Passenger Car Equivalents of Platooning Vehicles on Basic Segments. J. Transp. Eng. Part A Syst. 2018, 144, 04018063. [Google Scholar]
- Chang, X.; Li, H.; Rong, J.; Zhao, X.; Li, A. Analysis on Traffic Stability and Capacity for Mixed Traffic Flow with Platoons of Intelligent Connected Vehicles. Phys. A Statal Mech. Appl. 2020, 557, 124829. [Google Scholar] [CrossRef]
- Fernandes, P.; Nunes, U. Multiplatooning Leaders Positioning and Cooperative Behavior Algorithms of Communicant Automated Vehicles for High Traffic Capacity. IEEE Trans. Intell. Transp. Syst. 2015, 16, 1172–1187. [Google Scholar] [CrossRef] [Green Version]
- Qi, F. Coordinated Control Strategy for Autonomous Vehicle Intersections; Harbin Institute of Technology: Harbin, China, 2017. [Google Scholar]
- Rahman, M.S.; Abdel-Aty, M. Longitudinal safety evaluation of connected vehicles’ platooning on expressways. Accid. Anal. Prev. 2018, 117, 381. [Google Scholar] [CrossRef] [PubMed]
- Zhao, L.; Sun, J. Simulation Framework for Vehicle Platooning and Car-following Behaviors under Connected-Vehicle Environment. Procedia-Soc. Behav. Sci. 2013, 96, 914–924. [Google Scholar] [CrossRef] [Green Version]
- Amoozadeh, M.; Deng, H.; Chuah, C.N.; Zhang, H.M.; Ghosal, D. Platoon management with cooperative adaptive cruise control enabled by VANET. Veh. Commun. 2015, 2, 110–123. [Google Scholar] [CrossRef] [Green Version]
- Yue, L.; Abdel-Aty, M.; Wu, Y.; Wang, L. Assessment of the safety benefits of vehicles’ advanced driver assistance, connectivity and low level automation systems. Accid. Anal. Prev. 2018, 117, 55–64. [Google Scholar] [CrossRef]
- Vashitz, G.; Shinar, D.; Blum, Y. In-vehicle information systems to improve traffic safety in road tunnels. Transp. Res. Part F Traffic Psychol. Behav. 2008, 11, 61–74. [Google Scholar] [CrossRef]
- Fu, X.; He, S.; Du, J.; Ge, T. Effects of In-Vehicle Navigation on Perceptual Responses and Driving Behaviours of Drivers at Tunnel Entrances: A Naturalistic Driving Study. J. Adv. Transp. 2019, 2019, 9468451. [Google Scholar] [CrossRef]
- Chang, X.; Li, H.; Rong, J.; Qin, L.; Zhao, X. Spatiotemporal Characteristics of Vehicle Trajectories in a Connected Vehicle Environment—A Case of an Extra-Long Tunnel Scenario. IEEE Syst. J. 2020, 99, 1–12. [Google Scholar] [CrossRef]
- Walch, M.; Sieber, T.; Hock, P.; Baumann, M.; Weber, M. Towards Cooperative Driving: Involving the Driver in an Autonomous Vehicle’s Decision Making. In Proceedings of the 8th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Ann Arbor, MI, USA, 24–26 October 2016. [Google Scholar]
- Vaezipour, A.; Rakotonirainy, A.; Haworth, N.; Delhomme, P. Enhancing eco-safe driving behaviour through the use of in-vehicle human-machine interface: A qualitative study. Transp. Res. Part A Policy Pract. 2017, 100, 247–263. [Google Scholar] [CrossRef]
- Schleicher, S.; Gelau, C. The influence of Cruise Control and Adaptive Cruise Control on driving behaviour–A driving simulator study. Accid. Anal. Prev. 2011, 43, 1134–1139. [Google Scholar]
- Ben-Yaacov, A.; Maltz, M.; Shinar, D. Effects of an in-vehicle collision avoidance warning system on short-and long-term driving performance. Hum. Factors 2002, 44, 335–342. [Google Scholar] [CrossRef] [PubMed]
- Farah, H.; Koutsopoulos, H.N.; Saifuzzaman, M.; Koelbl, R.; Fuchs, S.; Bankosegger, D. Evaluation of the effect of cooperative infrastructure-to-vehicle systems on driver behavior. Transp. Res. Part C 2012, 21, 42–56. [Google Scholar] [CrossRef]
- Farah, H.; Koutsopoulos, H.N. Do cooperative systems make drivers’ car-following behavior safer? Transp. Res. Part C Emerg. Technol. 2014, 41, 61–72. [Google Scholar] [CrossRef]
- Pariota, L.; Bifulco, G.N.; Markkula, G.; Romano, R. Validation of driving behaviour as a step towards the investigation of Connected and Automated Vehicles by means of driving simulators. In Proceedings of the 2017 5th IEEE International Conference on Models and Technologies for Intelligent Transportation Systems (MT-ITS), Naples, Italy, 26–28 June 2017; pp. 274–279. [Google Scholar]
- Wu, Y.; Abdel-Aty, M.; Wang, L.; Rahman, M.S. Combined connected vehicles and variable speed limit strategies to reduce rear-end crash risk under fog conditions. J. Intell. Transp. Syst. 2020, 24, 494–513. [Google Scholar] [CrossRef]
- Yang, G.; Ahmed, M.M.; Gaweesh, S. Impact of Variable Speed Limit in a Connected Vehicle Environment on Truck Driver Behavior under Adverse Weather Conditions: Driving Simulator Study. Transp. Res. Rec. J. Transp. Res. Board 2019, 2673, 132–142. [Google Scholar] [CrossRef]
- Ackaah, W.; Bogenberger, K.; Bertini, R.L. Empirical evaluation of real-time traffic information for in-vehicle navigation and the variable speed limit system. J. Intell. Transp. Syst. 2019, 23, 1–14. [Google Scholar] [CrossRef]
- Wang, C.; Zhang, J.; Xu, L.; Li, L.; Ran, B. A New Solution for Freeway Congestion: Cooperative Speed Limit Control Using Distributed Reinforcement Learning. IEEE Access 2019, 7, 41947–41957. [Google Scholar] [CrossRef]
- Ghiasi, A.; Hussain, O.; Qian, Z.S.; Li, X. A mixed traffic capacity analysis and lane management model for connected automated vehicles: A Markov chain method. Transp. Res. Part B Methodol. 2017, 106, 266–292. [Google Scholar] [CrossRef]
- Hu, X.; Sun, J. Trajectory optimization of connected and autonomous vehicles at a multilane freeway merging area. Transp. Res. Part C Emerg. Technol. 2019, 101, 111–125. [Google Scholar] [CrossRef]
- Ma, K.; Wang, H. Influence of Exclusive Lanes for Connected and Autonomous Vehicles on Freeway Traffic Flow. IEEE Access 2019, 7, 50168–50178. [Google Scholar] [CrossRef]
- Ghiasi, A.; Hussain, O.; Qian, Z.S.; Li, X.S. Lane Management with Variable Lane Width and Model Calibration for Connected Automated Vehicles. J. Transp. Eng. 2020, 146, 04019075.1–04019075.12. [Google Scholar] [CrossRef]
- Guo, Y.; Zhang, H.; Wang, C.; Sun, Q.; Li, W. Driver lane change intention recognition in the connected environment. Phys. A Stat. Mech. Appl. 2021, 575, 126057. [Google Scholar] [CrossRef]
- Zhang, P.; Yue, H.; Shao, C.; Zhang, X.; Ran, B. Modelling the road network capacity considering residual queues and connected automated vehicles. IET Intell. Transp. Syst. 2022, 16, 543–570. [Google Scholar] [CrossRef]
- Ortúzar, J.D.D. Future transportation: Sustainability, complexity and individualization of choices. Commun. Transp. Res. 2021, 1, 100010. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model Types | Model Characteristics | Base Models | Novelty | Limitations | Ref# |
|---|---|---|---|---|---|
| Stimulus-response model | The leading vehicle effect on the driver is expressed as a stimulus; the driver’s perception is regarded as a sensitivity coefficient to the stimulus, and the driver’s response can be expressed as the acceleration of the car following. | RV model. GM model. Newell model. | Simple traffic phenomena can be modeled, and the implementation effect is good. | For more complex traffic phenomena, the model will be very complex and the effect of model implementation is poor. | [19,20,21,22,23,24] |
| Safety distance model | The driver always expects to keep a safe headway with the leading vehicle. When the driver of the front guide car suddenly brakes, the driver of the following car is allowed enough time to slow down and stop, so as to avoid the collision. | CA model. FRESIM model. CARSIM model. | The model is practical and effective. | The safety distance of the model only ensures that collision will not occur in case of emergency braking. | [25,26,27,28] |
| Physiological and psychological model | Based on the driver’s perception and reaction characteristics, this paper attempts to introduce more human factors into the car following behavior modeling to better adapt to real driving behavior. | Wiedemann74 model. | Nowadays, the popular driver psychological car following model often randomly generates the threshold for dividing various driving states according to a certain statistical distribution law, in order to expect to obtain the random characteristics of traffic flow more in line with the actual requirements. | The current driving psychological car following model cannot analyze and model all driving behavior characteristics. | [29,30] |
| Artificial intelligence model | It is difficult to accurately express the driver’s characteristics with a mathematical model, so the artificial intelligence method is a better choice that can effectively describe the driver’s characteristics. This is also one of the research hotspots of car-following behavior modeling in recent years. | The fuzzy MISSION model. TRAFFIC-JAM model. Artificial neural network model. Fuzzy neural network model. | It shows certain advantages in dealing with complex nonlinear problems, and shows good learning ability under large data samples. | The physical meaning of some models is not clear, the calibrated parameters change greatly under different conditions, and are greatly affected by the data. When the driving environment changes greatly, the fitting results are often far from the reality. | [25,31,32] |
| Model Types | Model Characteristics | Base Models | Novelty | Limitations | Ref# |
|---|---|---|---|---|---|
| Optimized velocity model | In essence, it is similar to the stimulus-response model, but the stimulus is the difference between the vehicle speed and the optimized speed. The model is more intuitive, simple, and easy to analyze. | OV Model. FVD Model. | By using linear and nonlinear stability theory to analyze the optimal speed model, the stability conditions of the model and the propagation mechanism of traffic jam at the critical point can be obtained. | In the model simulation, there exist too fast acceleration, unreasonable acceleration and deceleration, and even reversing and collision. | [33,34,35] |
| Intelligent driver model | The model includes the acceleration trend in the free state and the deceleration trend considering the collision with the leading vehicle. The numerical simulation results are consistent with the measured data and can reproduce complex macroscopic traffic phenomenon. | Intelligent Driver Model. | It has parameter calibration. At the same time, unlike previous studies, a large number of parameters need to be calibrated. In this model, only a few parameters need to be adjusted, and the free flow and crowded flow can be expressed separately with the same expression. | It is difficult to obtain the simulation effect of intelligent control and cooperative driving. | [36,37,38] |
| Cellular automata model | In essence, it is defined as a dynamic system that evolves in discrete time dimension according to certain local rules in a cellular space composed of discrete and finite cells. | Wolfram 184 Model. Na Sch Model. FI Model. | In the process of simulation calculation, the calculation speed is relatively fast, which is especially suitable for traffic simulation of large-scale road networks. At the same time, based on the model, the reasonably designed evolution process can reproduce most common phenomena in traffic. | There are few such regular and consistent spatial systems in the real world. Some limitations of cell model restrict its ability to simulate the real world. | [39,40,41,42,43,44,45] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chang, X.; Zhang, X.; Li, H.; Wang, C.; Liu, Z. A Survey on Mixed Traffic Flow Characteristics in Connected Vehicle Environments. Sustainability 2022, 14, 7629. https://doi.org/10.3390/su14137629
Chang X, Zhang X, Li H, Wang C, Liu Z. A Survey on Mixed Traffic Flow Characteristics in Connected Vehicle Environments. Sustainability. 2022; 14(13):7629. https://doi.org/10.3390/su14137629
Chicago/Turabian StyleChang, Xin, Xingjian Zhang, Haichao Li, Chang Wang, and Zhe Liu. 2022. "A Survey on Mixed Traffic Flow Characteristics in Connected Vehicle Environments" Sustainability 14, no. 13: 7629. https://doi.org/10.3390/su14137629
APA StyleChang, X., Zhang, X., Li, H., Wang, C., & Liu, Z. (2022). A Survey on Mixed Traffic Flow Characteristics in Connected Vehicle Environments. Sustainability, 14(13), 7629. https://doi.org/10.3390/su14137629