
A Distributed Mix-Context-Based Method for Location Privacy in Road Networks

 , , , , and
, , , , and 
Abstract
:1. Introduction
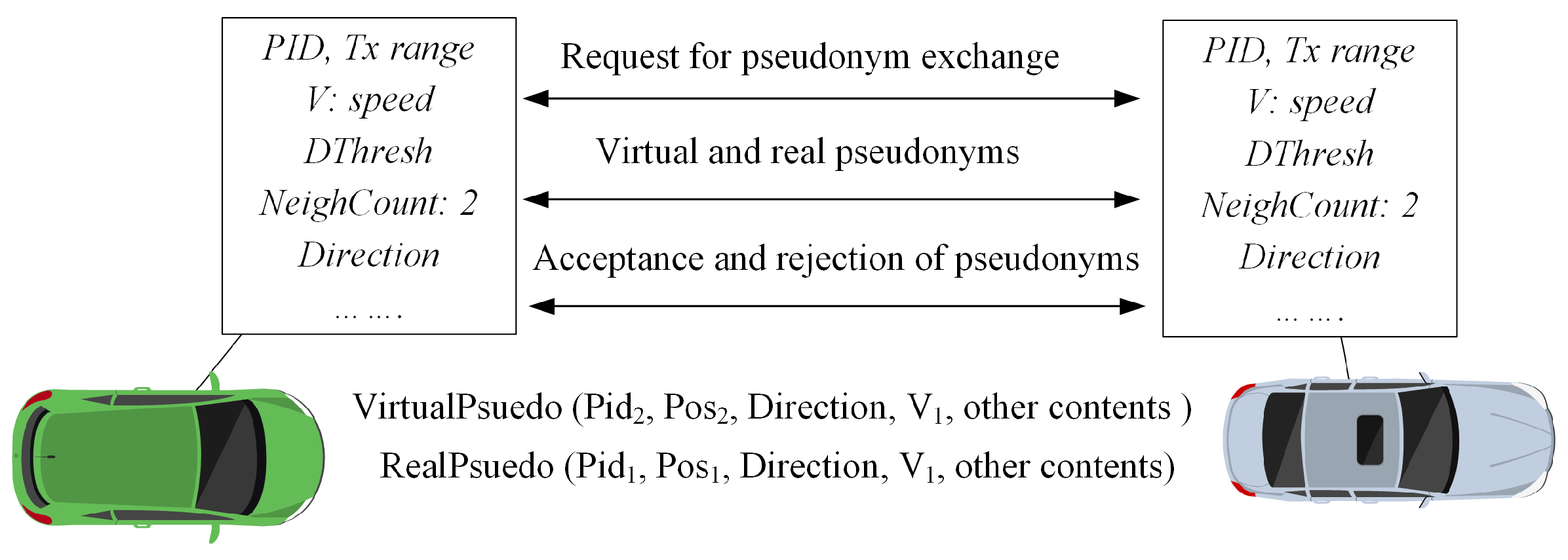
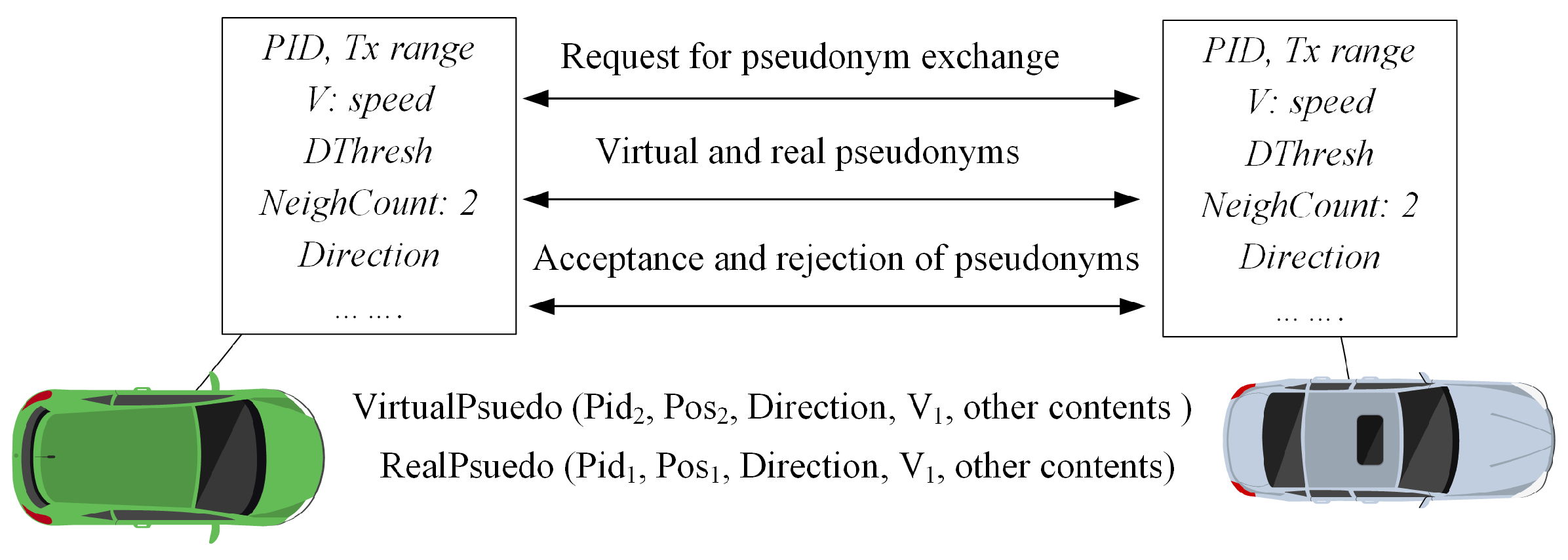
- We introduce a virtual pseudonym exchange suitable method for a low number of vehicles in transmission range. This will mix vehicle identities to provide anonymisation to a target vehicle in that region.
- Efficiently utilize the diverse traffic density according to the road context information to hide location privacy of a vehicle.
- We utilize the road network context for the protection of location privacy, which reduces its impacts on road network applications.
2. Related Work

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. | Method | Adversary Model | Mode of Execution | Accountability | Preserve VANETs Applications | Privacy Metrics | Cost (Time, Computation, Communication) |
|---|---|---|---|---|---|---|---|
| [49] | Cooperative | General adversary | Infrastructure less | No | No | Protection rate | Not given |
| [13] | Mix zone | GPA | Infrastructure based | No | No | ASS, Location privacy gain | Reduced |
| [14] | Random selection | Passive adversary | Infrastructure based | No | No | ASS | Increased |
| [50] | Silent mode | Global passive adversary | Infrastructure less | No | No | ASS, entropy, tracking probability | Reduced |
| [32] | Scheme permutation | Global passive adversary | Infrastructure less | Yes | Yes | ASS, traceability, confusion, entropy | Not computed |
| [24] | Dummy data | External global attacker | Infrastructure less | No | No | Anonymity | Reduced |
| [12] | Cheating detection | Global passive adversary | Infrastructure based | No | No | ASS, entropy, attacker probability | Not mentioned |
| [30] | Silent mode | Global passive adversary | Infrastructure less | No | Yes | Anonymity, Traceability | Not mentioned |
| [31] | Silent mode | Global passive adversary | Infrastructure less | No | Yes | ASS, entropy, traceability | Not computed |
| [9] | Triggered based | External passive adversary | Infrastructure less | Yes | Yes | Anonymity, entropy, Tracking percentage, | Not computed |
| [51] | Dummy data | Global passive adversary | Infrastructure less | No | Yes | ASS, entropy, tracking probability | Not computed |
| [42] | Route confusion | General attacker | Infrastructure based | No | No | ASS, entropy, traceability | Not mentioned |
3. Models and Goals
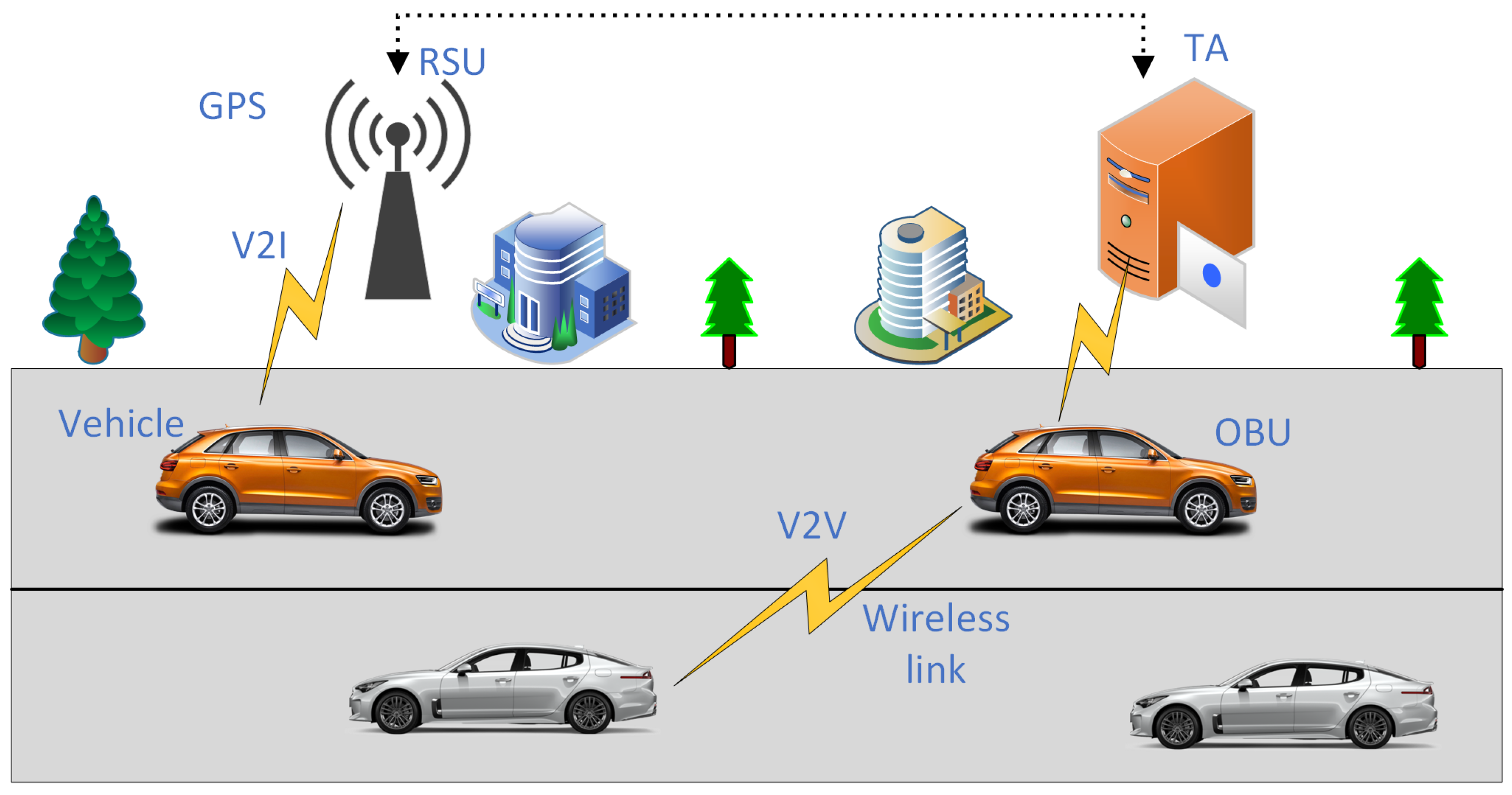
3.1. System Model
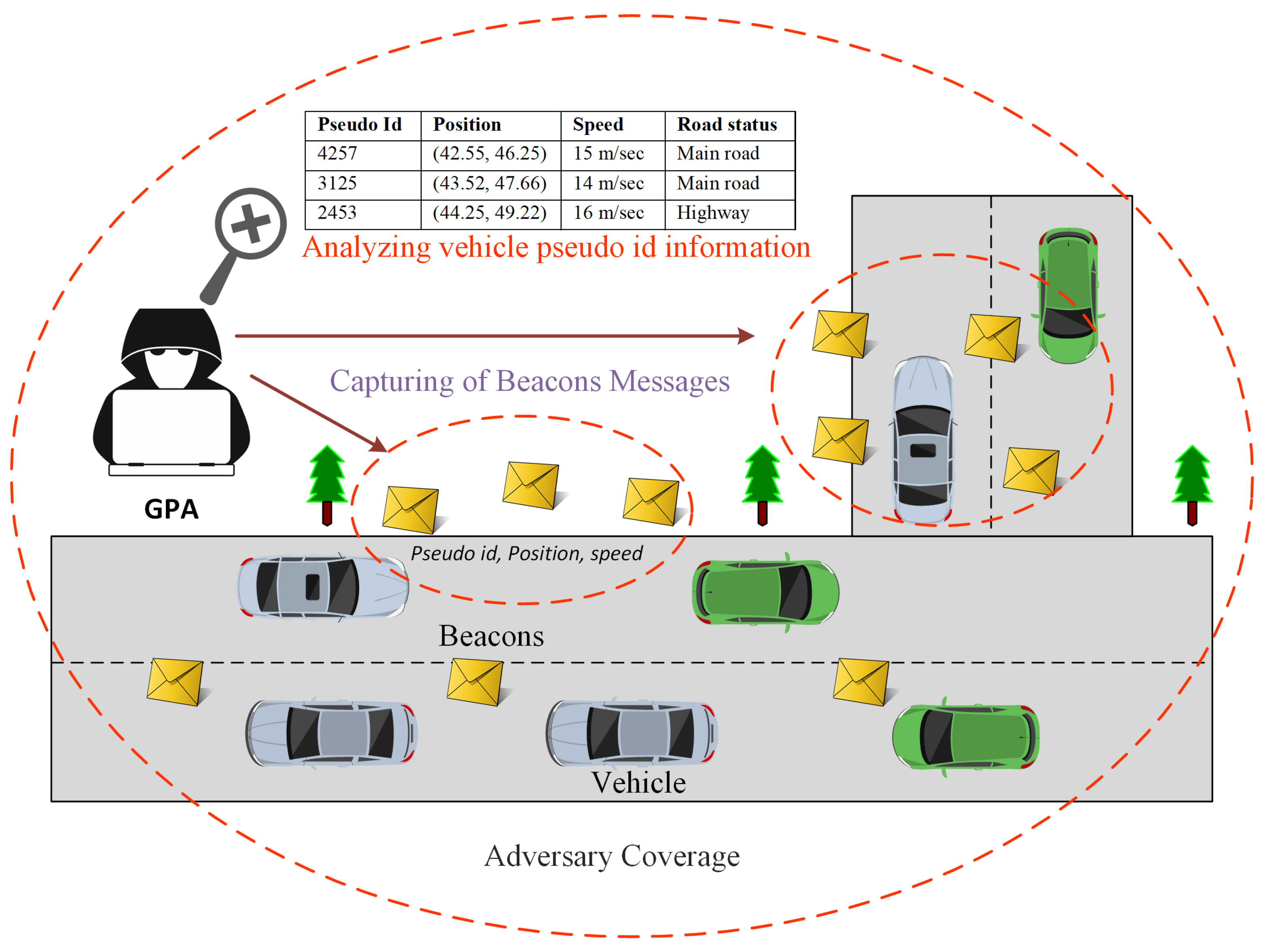
3.2. Adversary Model
3.3. Goals
- Location anonymisation at diverse vehicle traffic conditions.
- Virtual pseudonym exchange process to protect location under low traffic conditions.
- Dynamic mix context zone creation based on different road parameters such as vehicle speed, direction, and traffic density.
- The pseudonym change and exchange process are based on the road context information.
- Preventing an adversary from linking various pseudonyms of a vehicle at different location spots.
- Reducing the impact of privacy protection on the efficacy of road network applications.
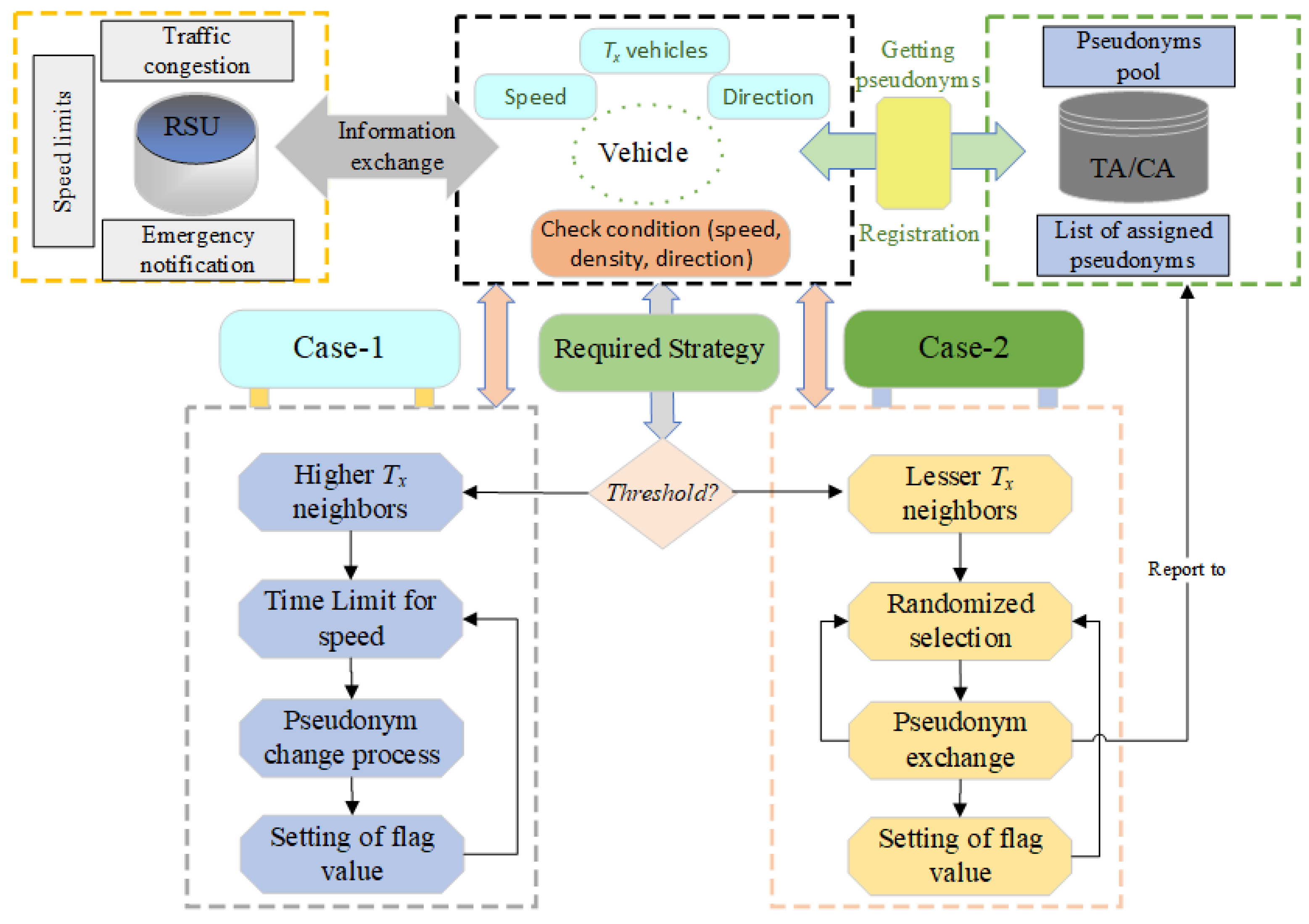
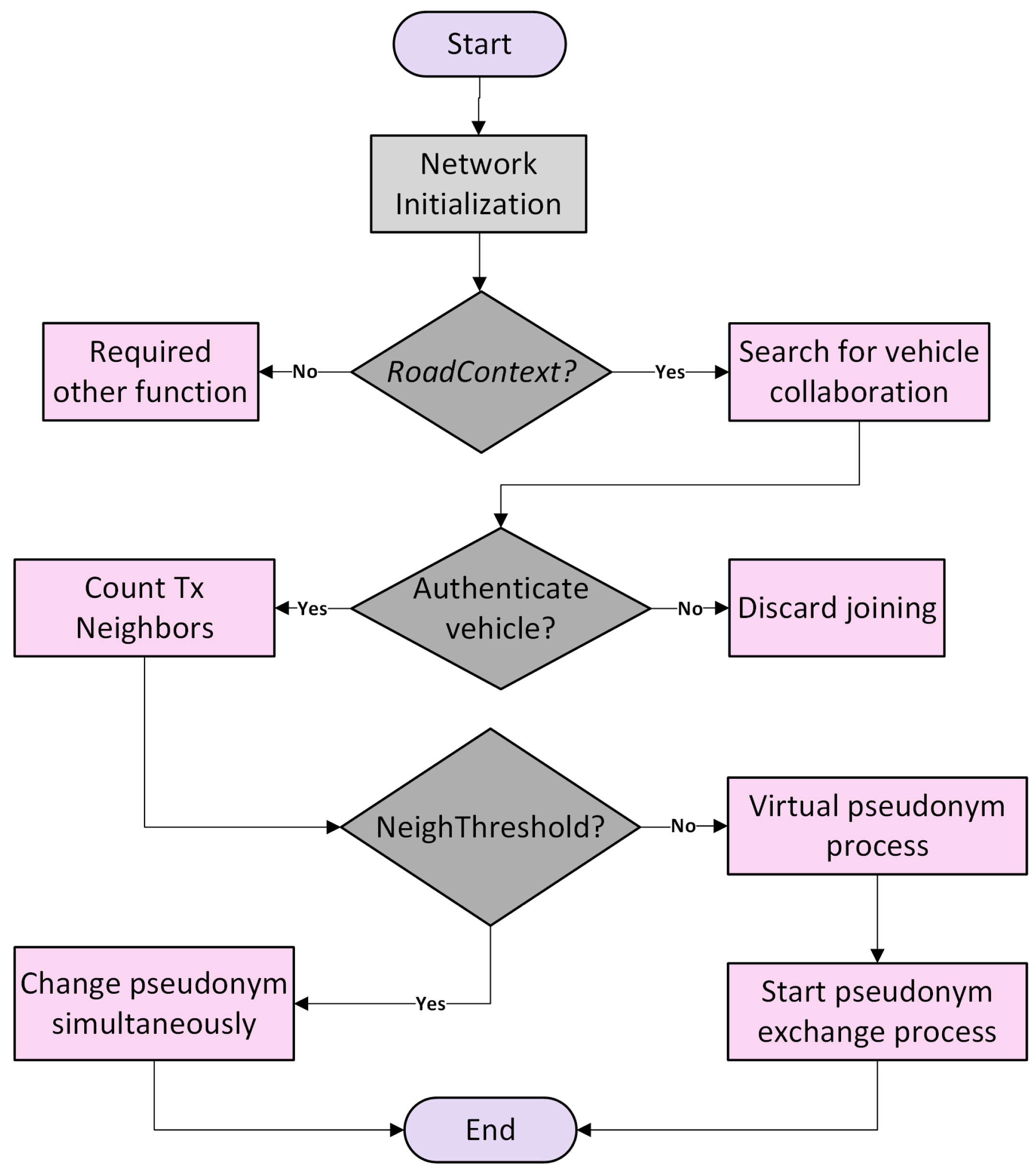
4. Proposed Solution
| Algorithm 1 Crowd-based Mix Context. |
| Initialization: : Any vehicle i, : Transmission range, : Density threshold, : Neighbor threshold, : Vehicle density, : Speed range, : Beacon broadcast latency, D: Direction of vehicle Input: , D, , Output: Successful pseudonym update process
|
| Algorithm 2 Neighbor Function. |
| Initialization: : any vehicle i, : Transmission range, : Speed Range, D: Direction of a vehicle, : Counting of number of vehicles Input: , , D Output: Number of transmission range vehicles ()
|
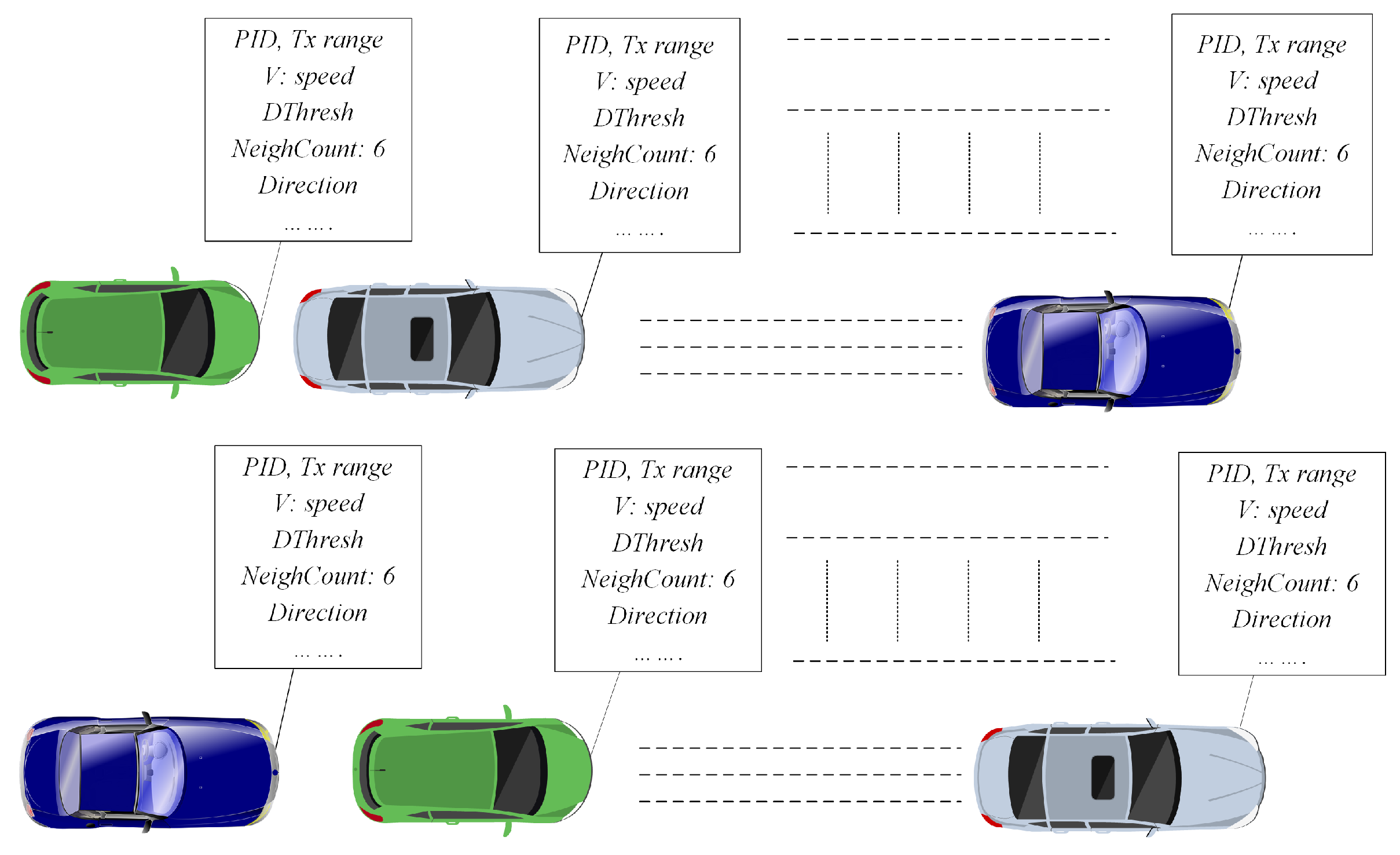
4.1. Vehicle High Traffic Density at Low Speed
| Algorithm 3 Mix context at higher density. |
| Initialization: : Any vehicle i, : Transmission range, : Neighbor threshold, : Speed range, : waiting time limit, D: vehicle direction Input: , direction, , Output: Successful pseudonym change process
|
4.2. Vehicle Low Traffic Density at Low Speed
| Algorithm 4 Virtual Mix Context. |
| Initialization:: Any vehicle i, : Transmission range, : Neighborhood threshold, : Speed range, D: Direction of vehicle, : Beacon broadcast latency, : Pseudonym update value Input:, D, , Output: Pseudonym Exchange process
|
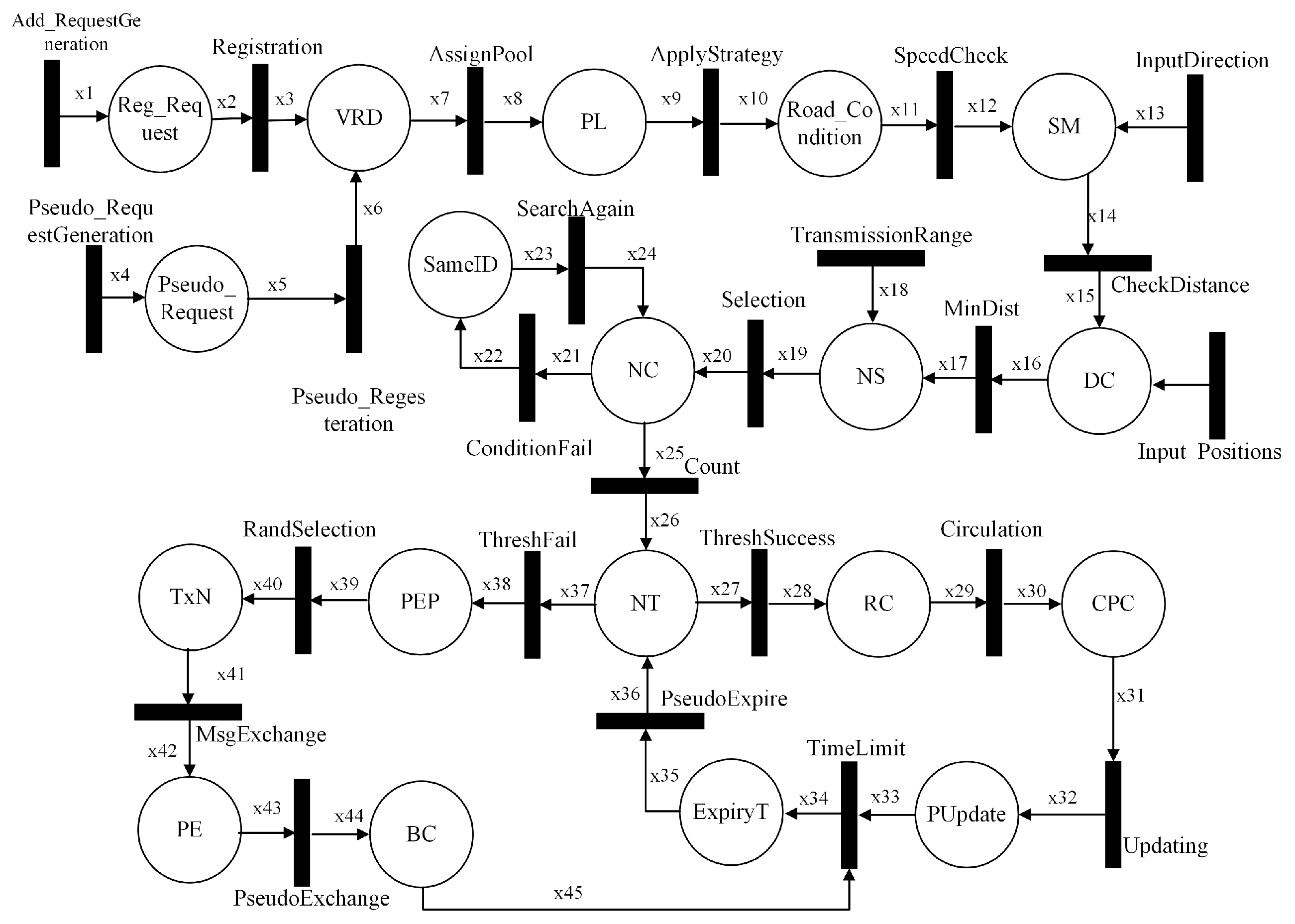
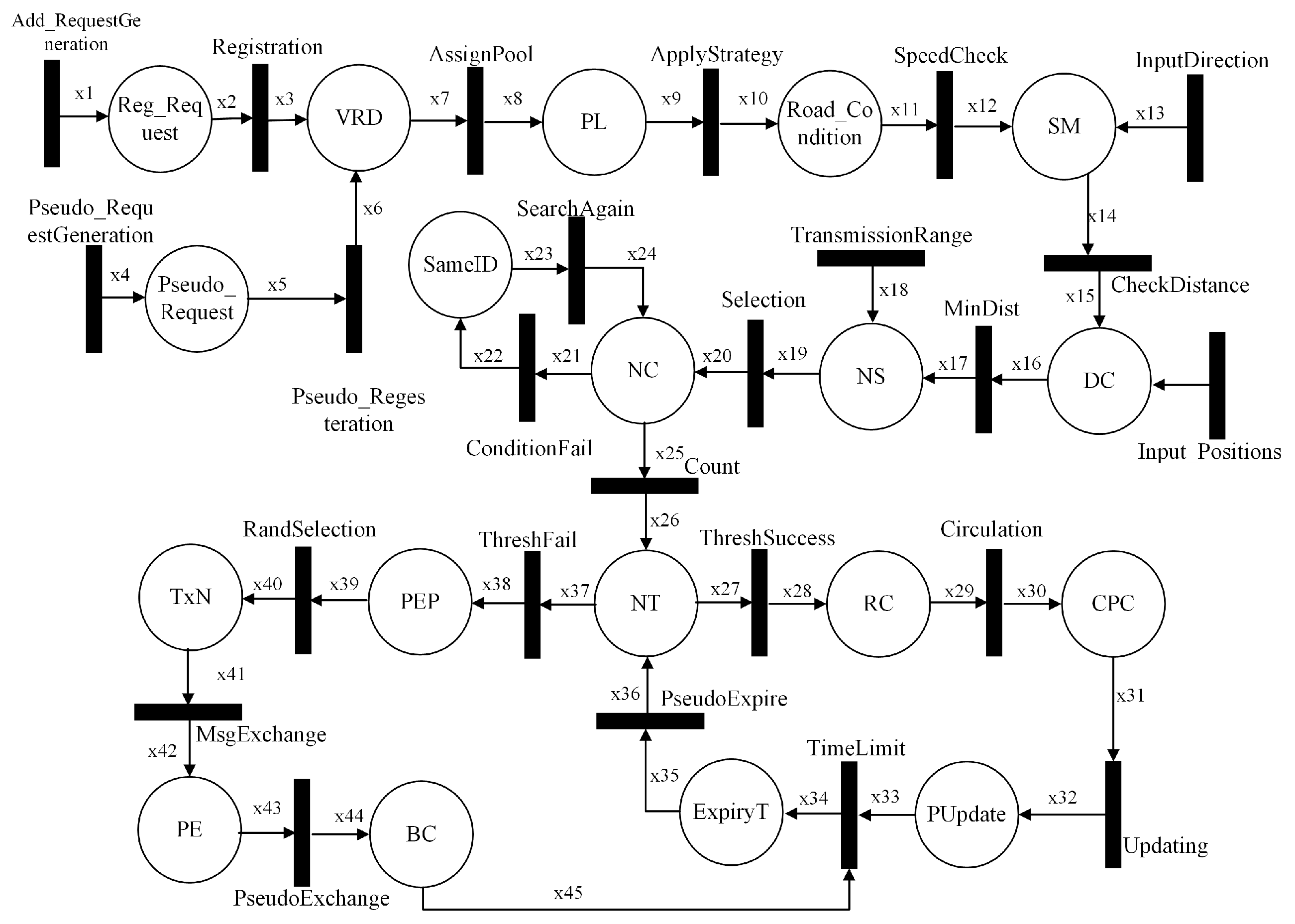
5. Formal Modeling and Specification
6. Experimental Setup
6.1. Simulation Setup
6.2. Evaluation Criteria
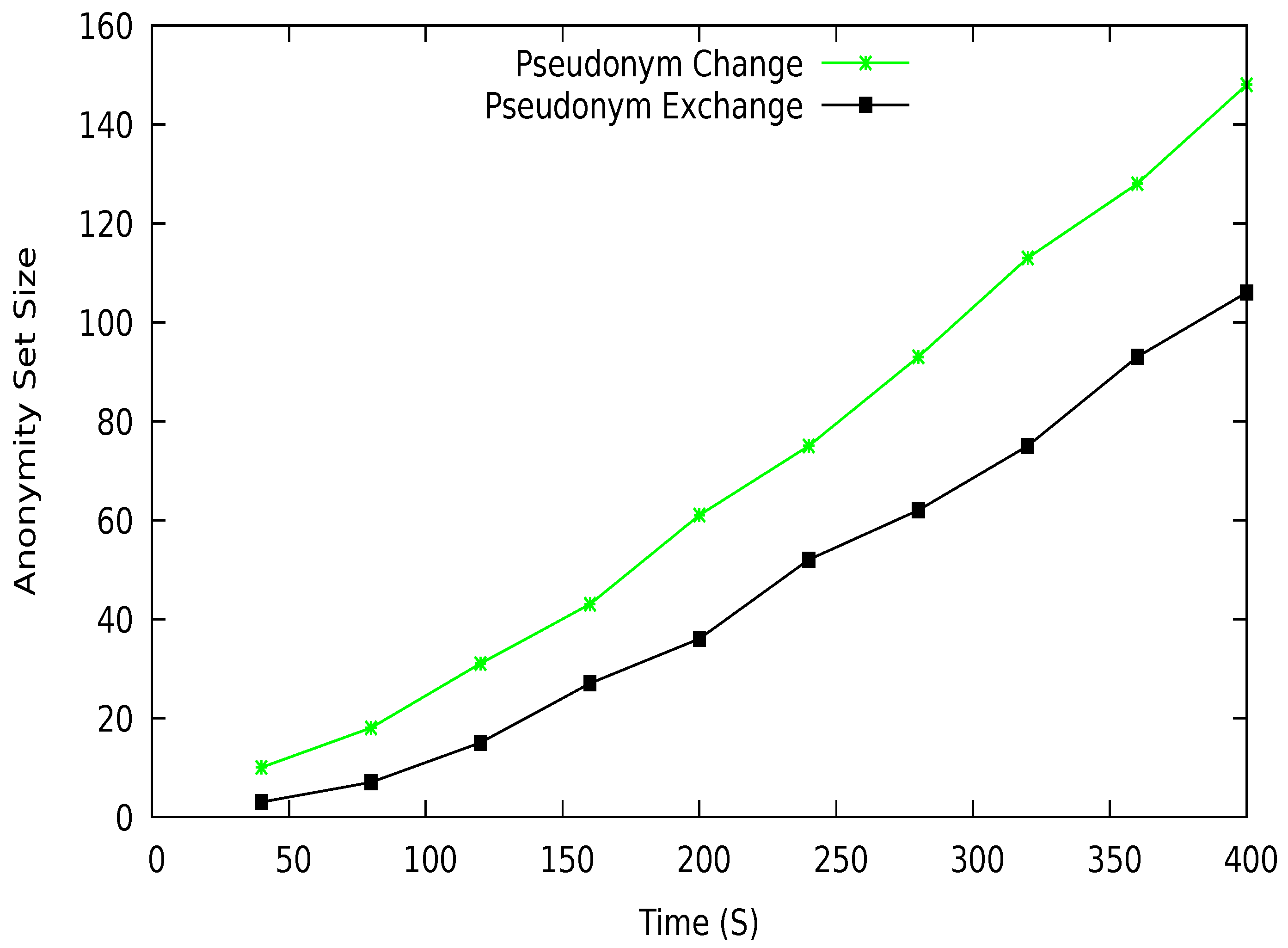
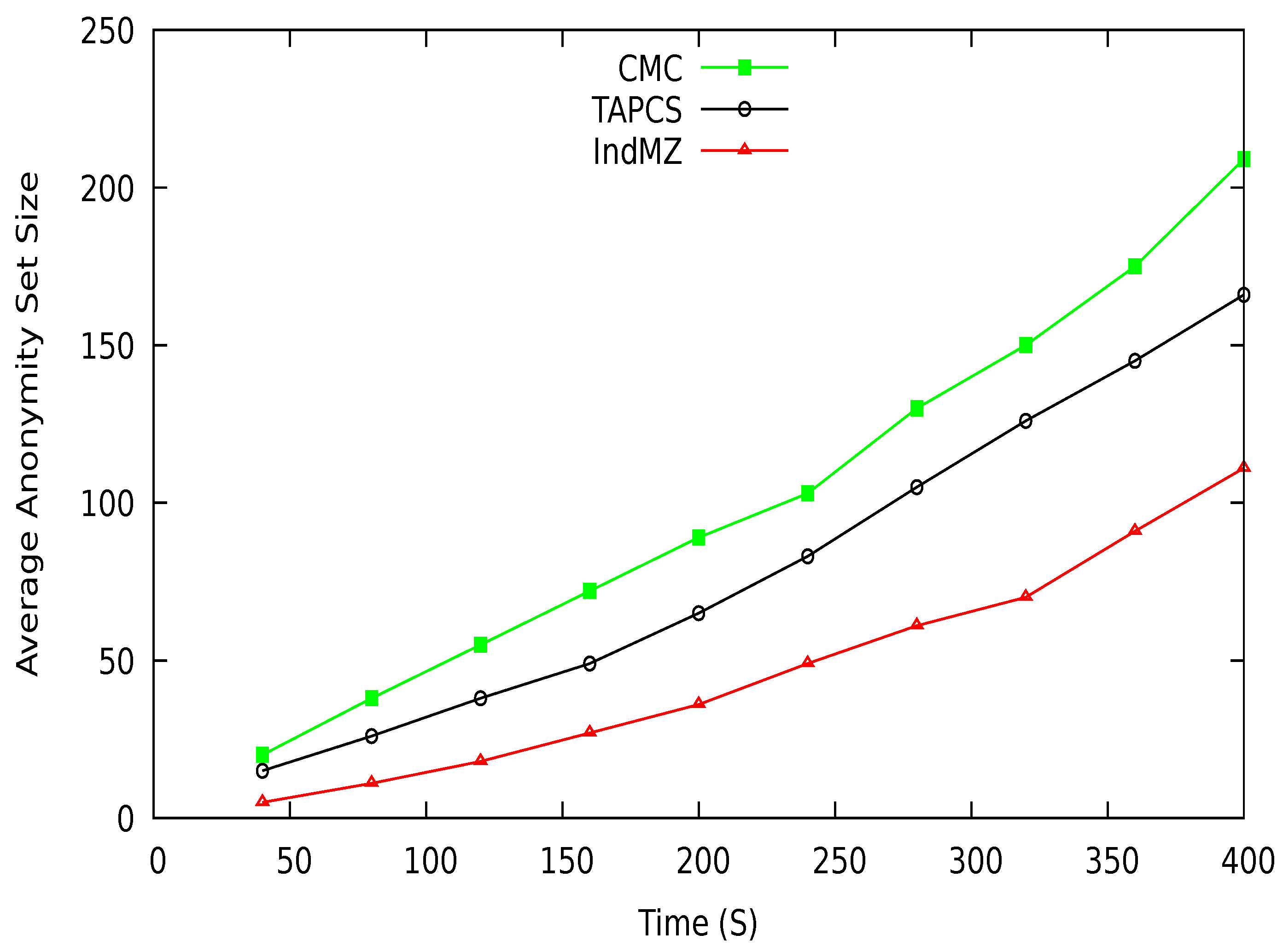
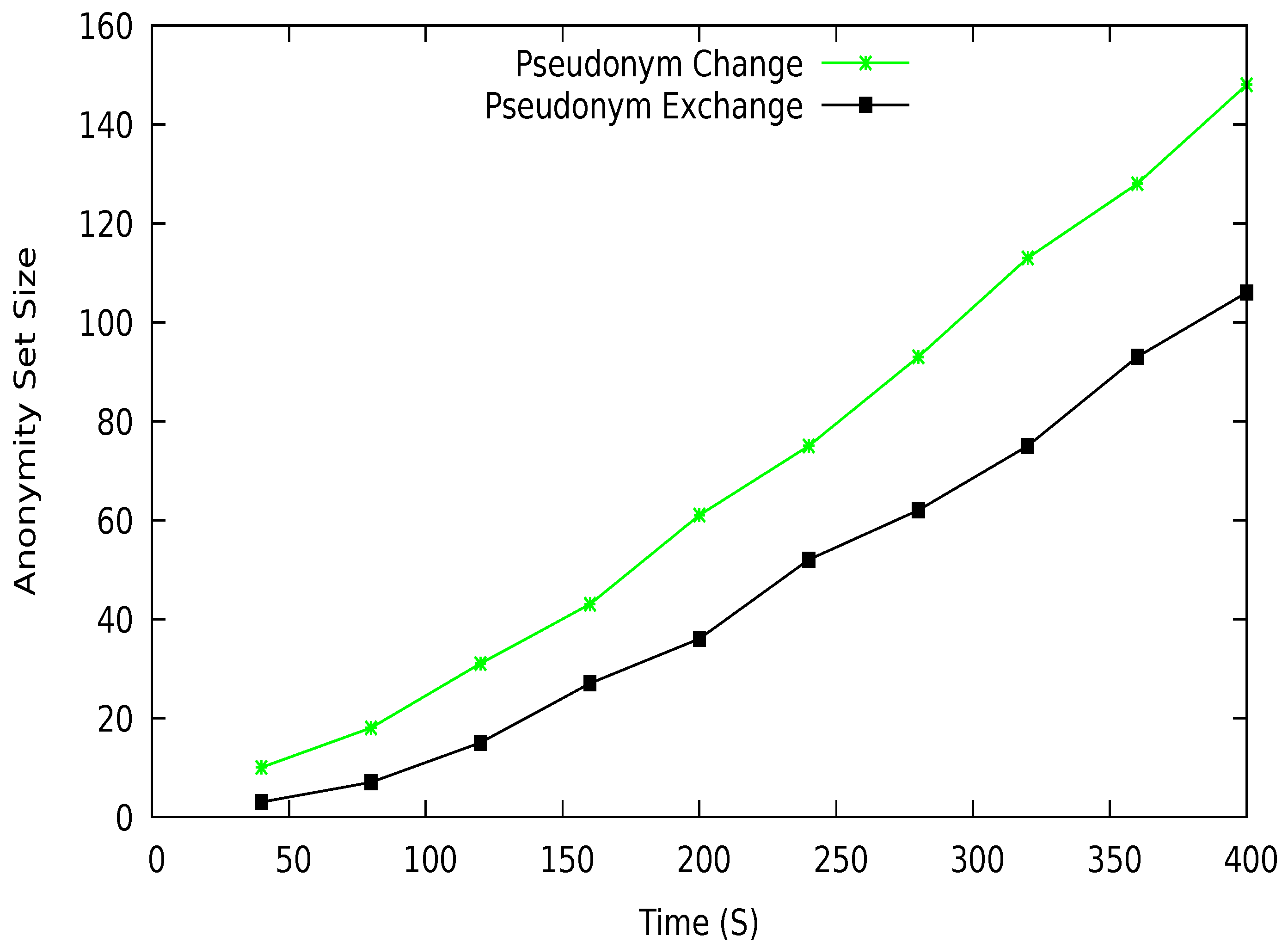
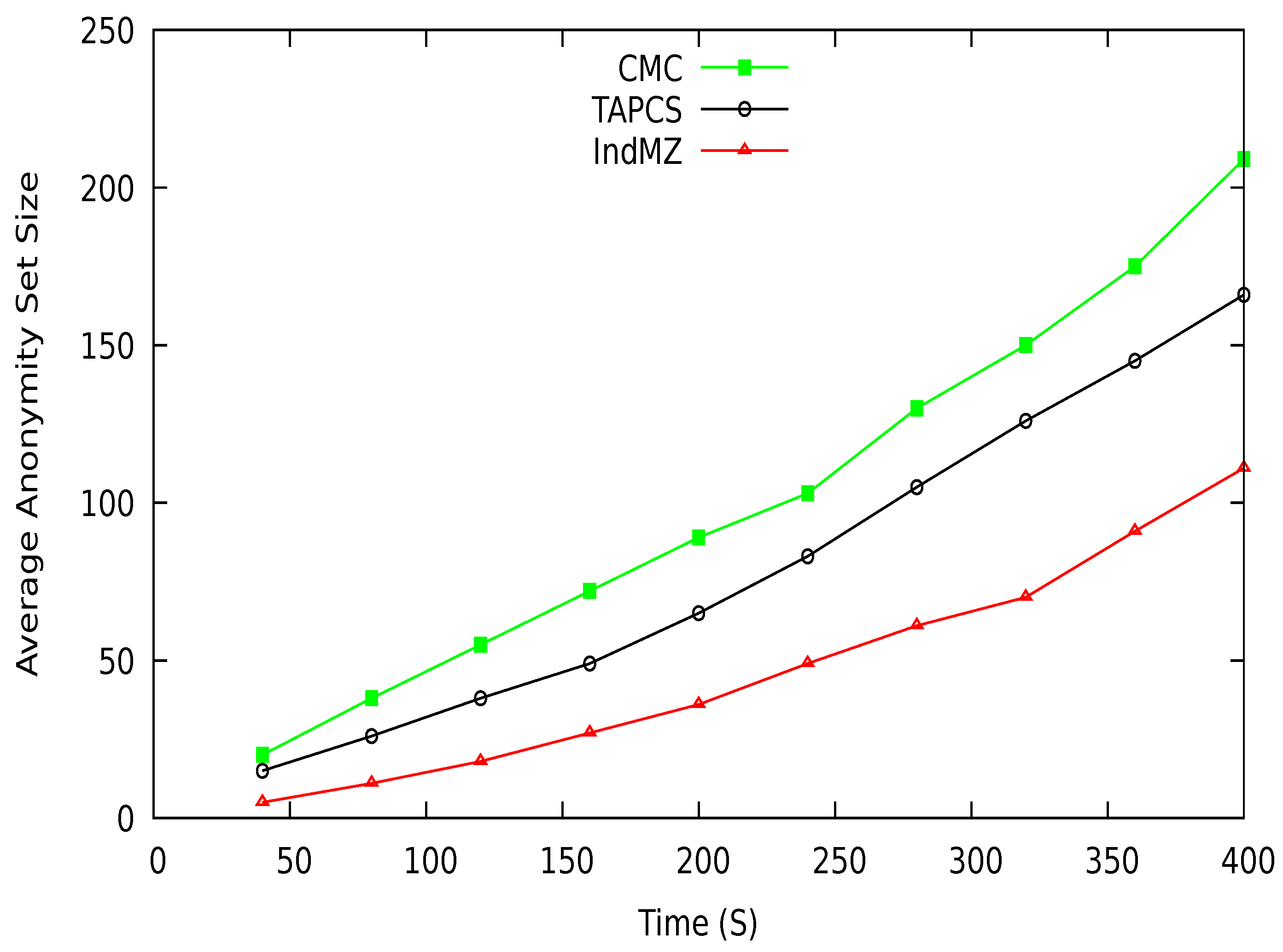
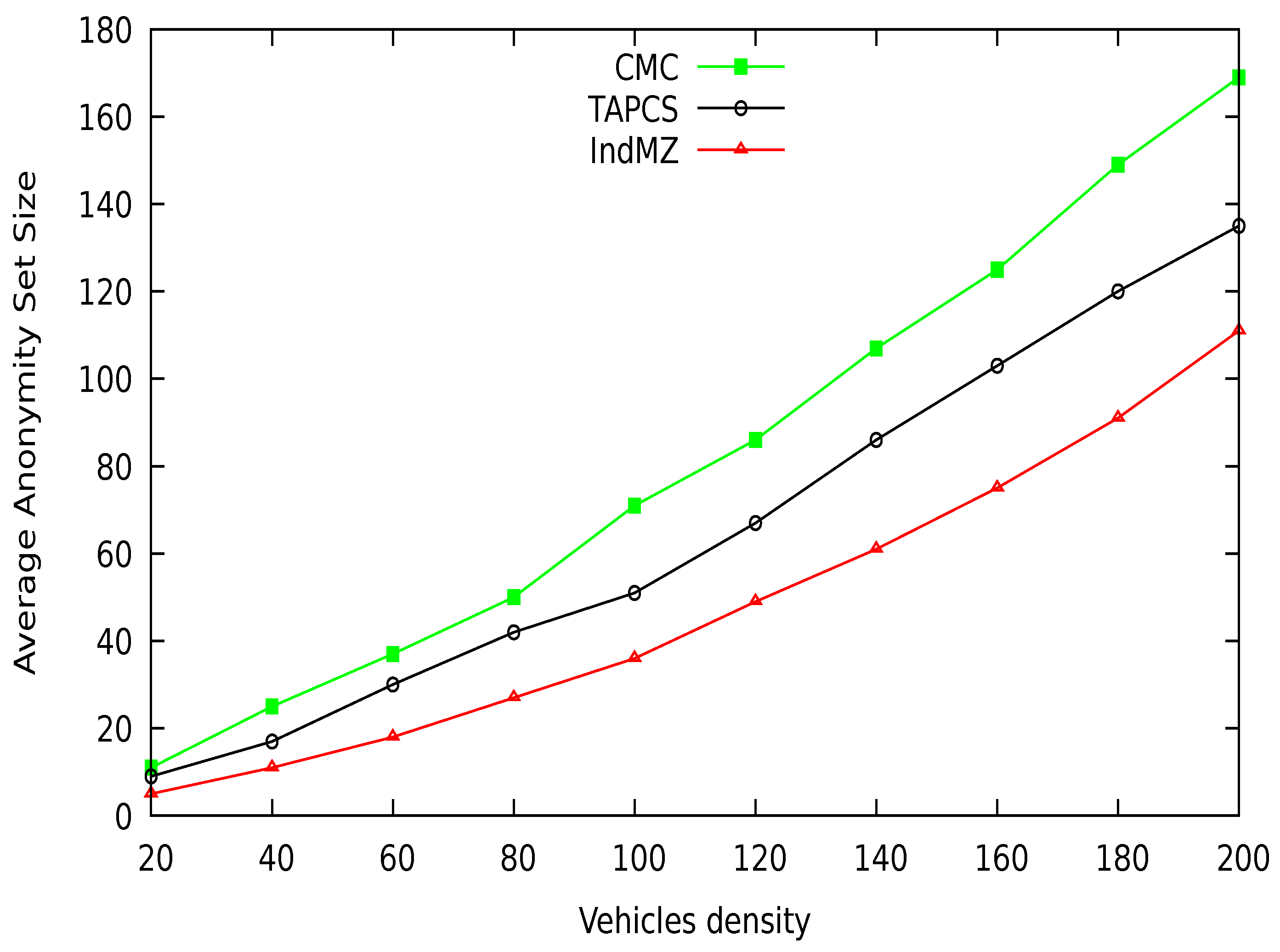
6.2.1. Anonymity Set Size
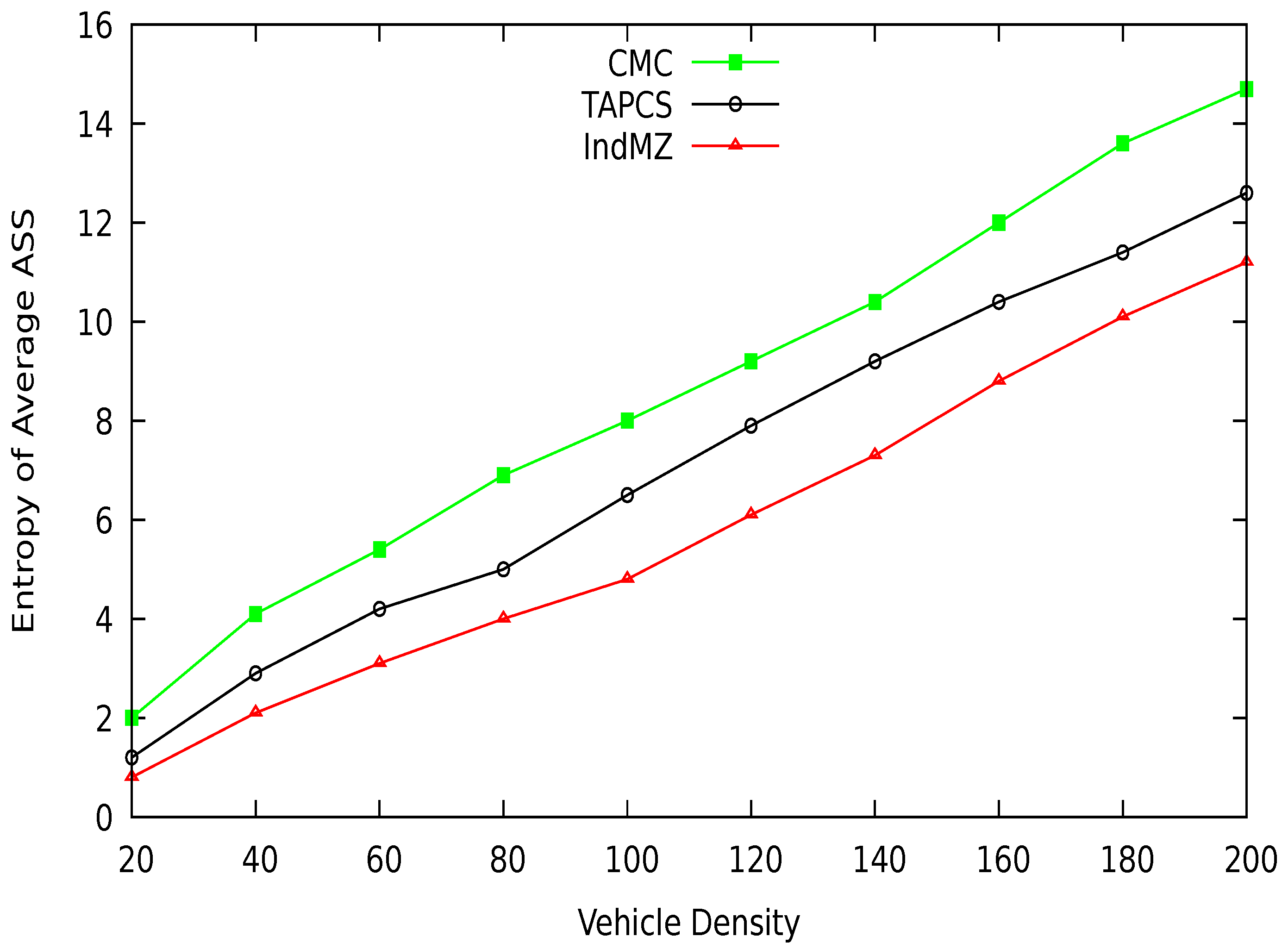
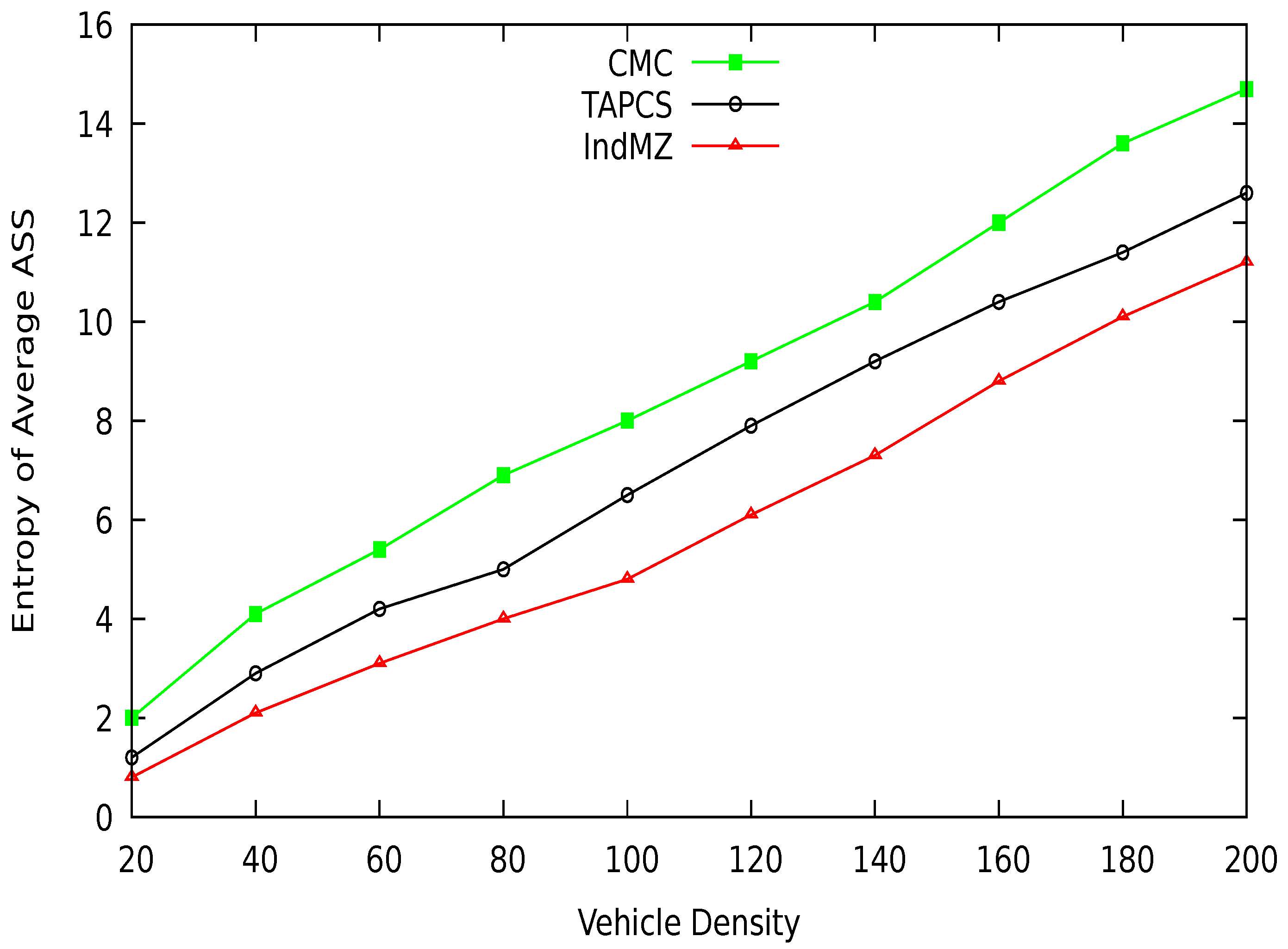
6.2.2. Entropy
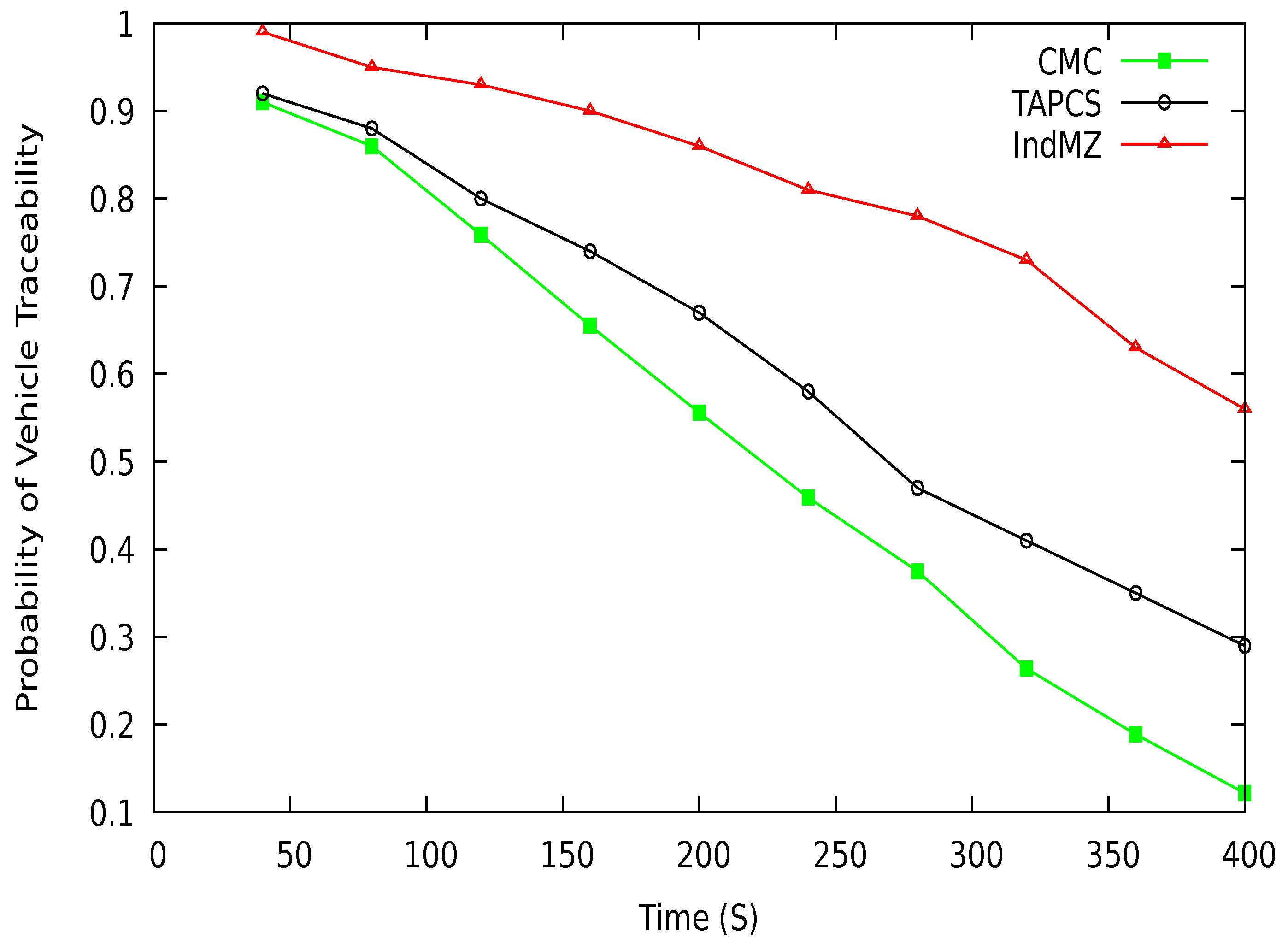
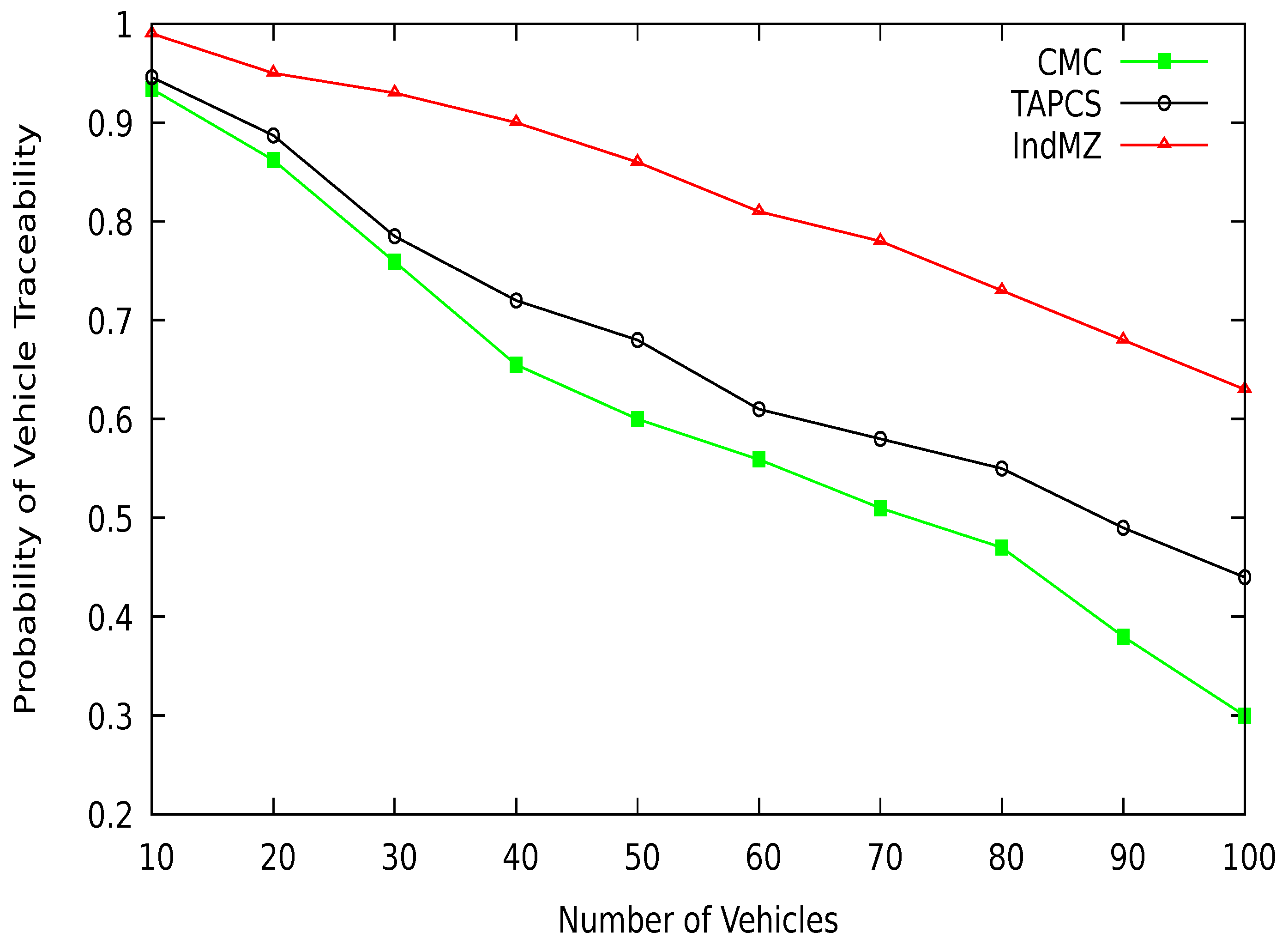
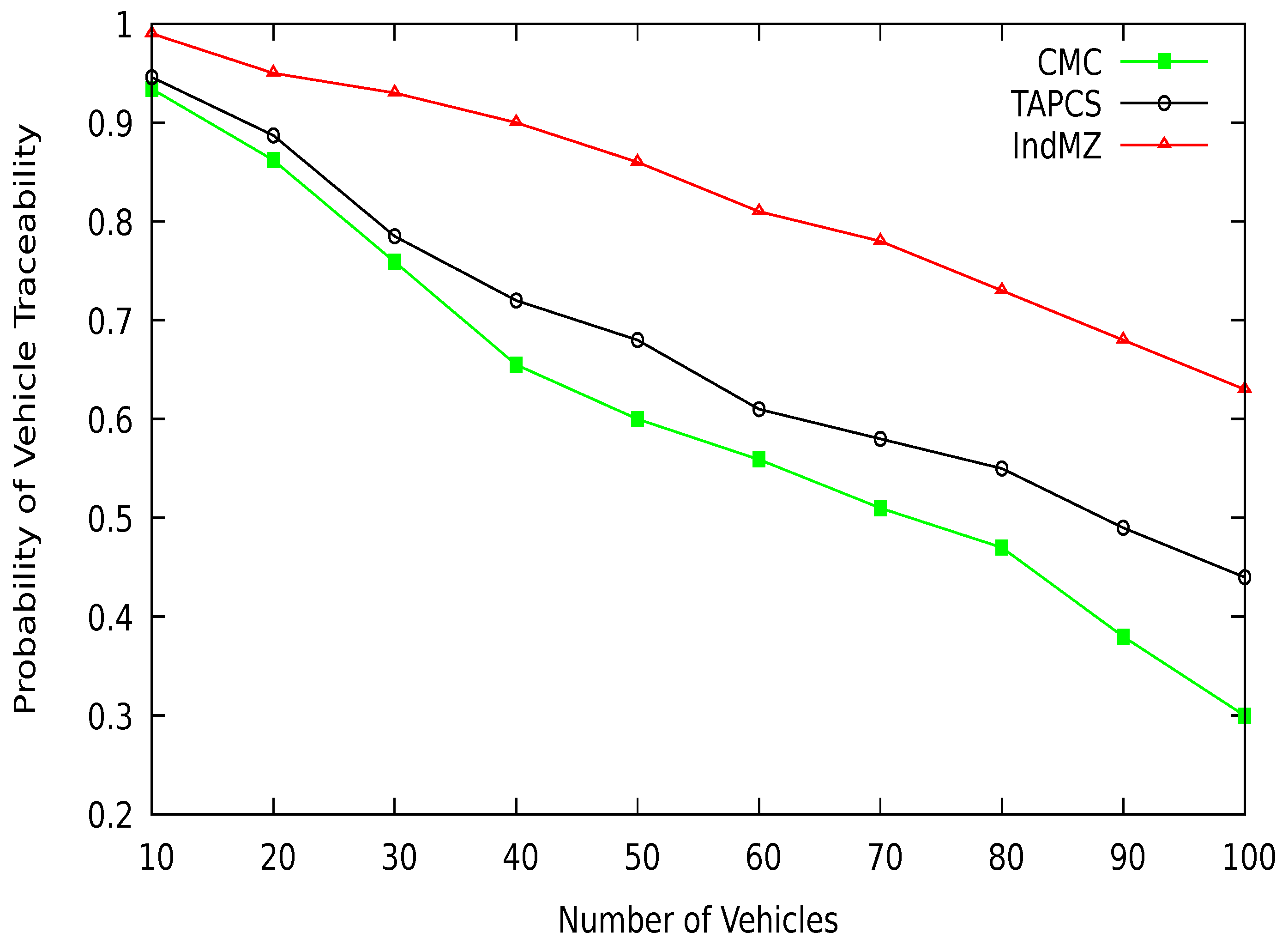
6.2.3. Vehicle Traceability
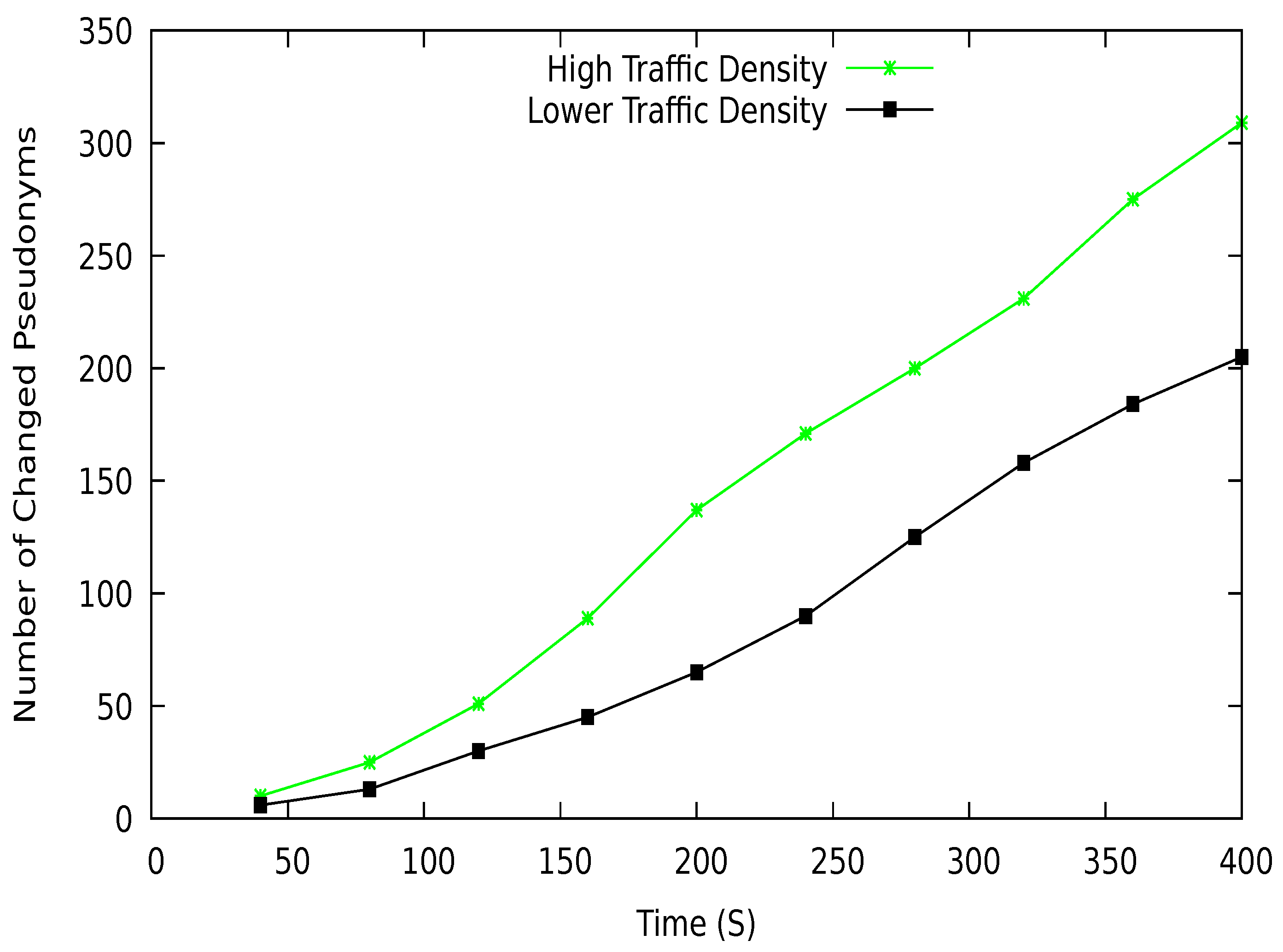
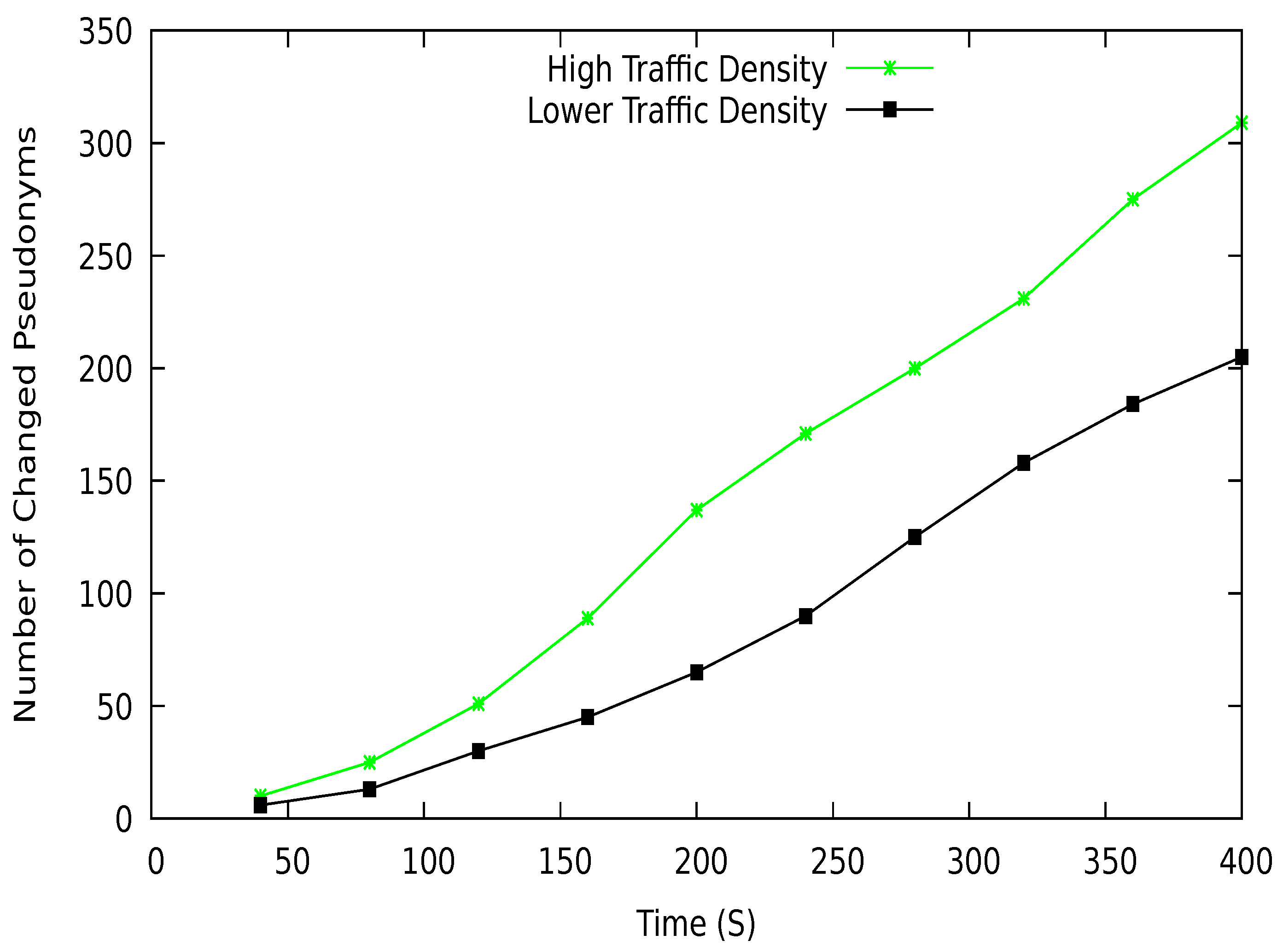
7. Performance Analysis
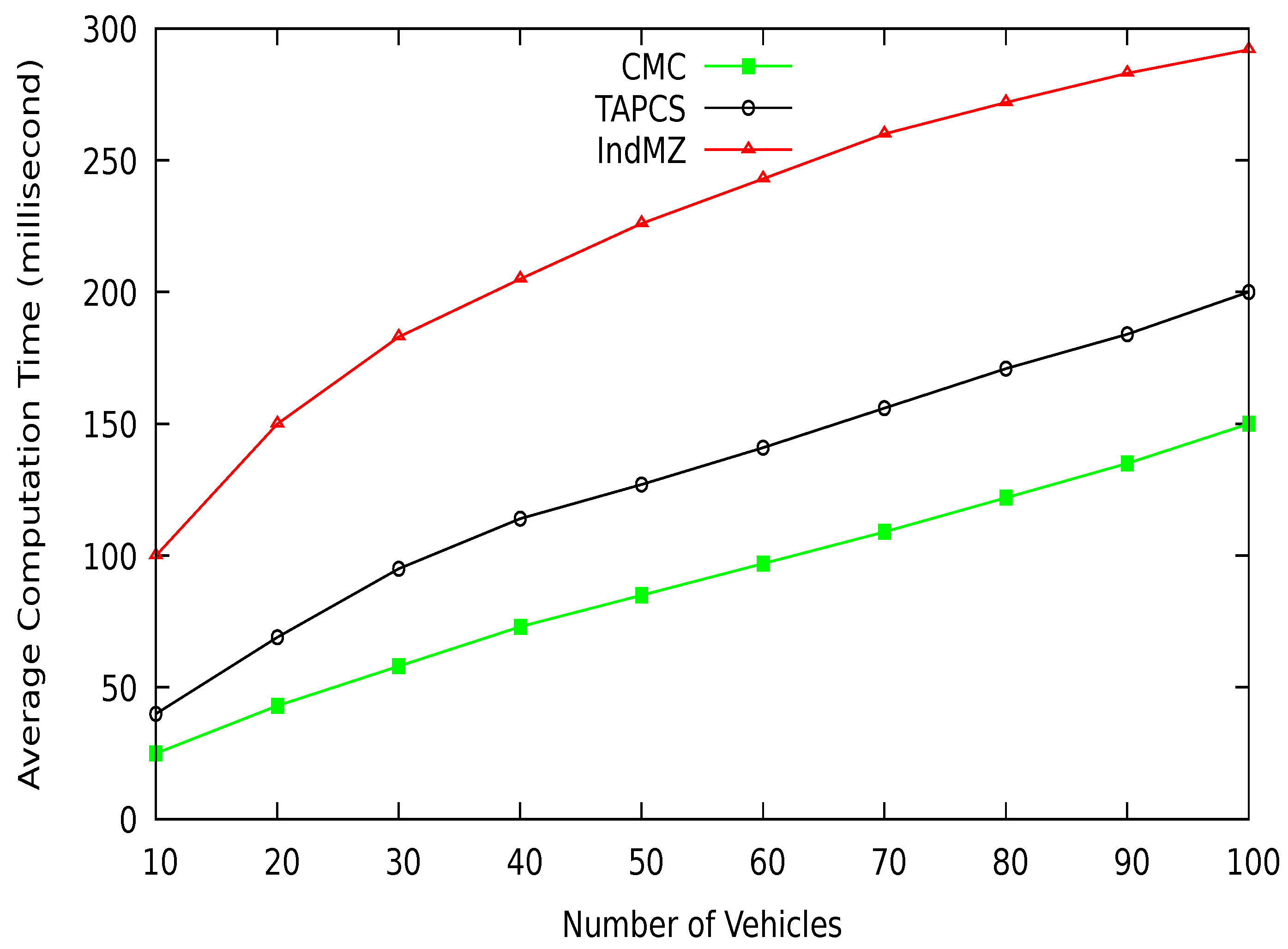
8. Performance Comparison of CMC with Existing Schemes
9. Analysis and Discussion
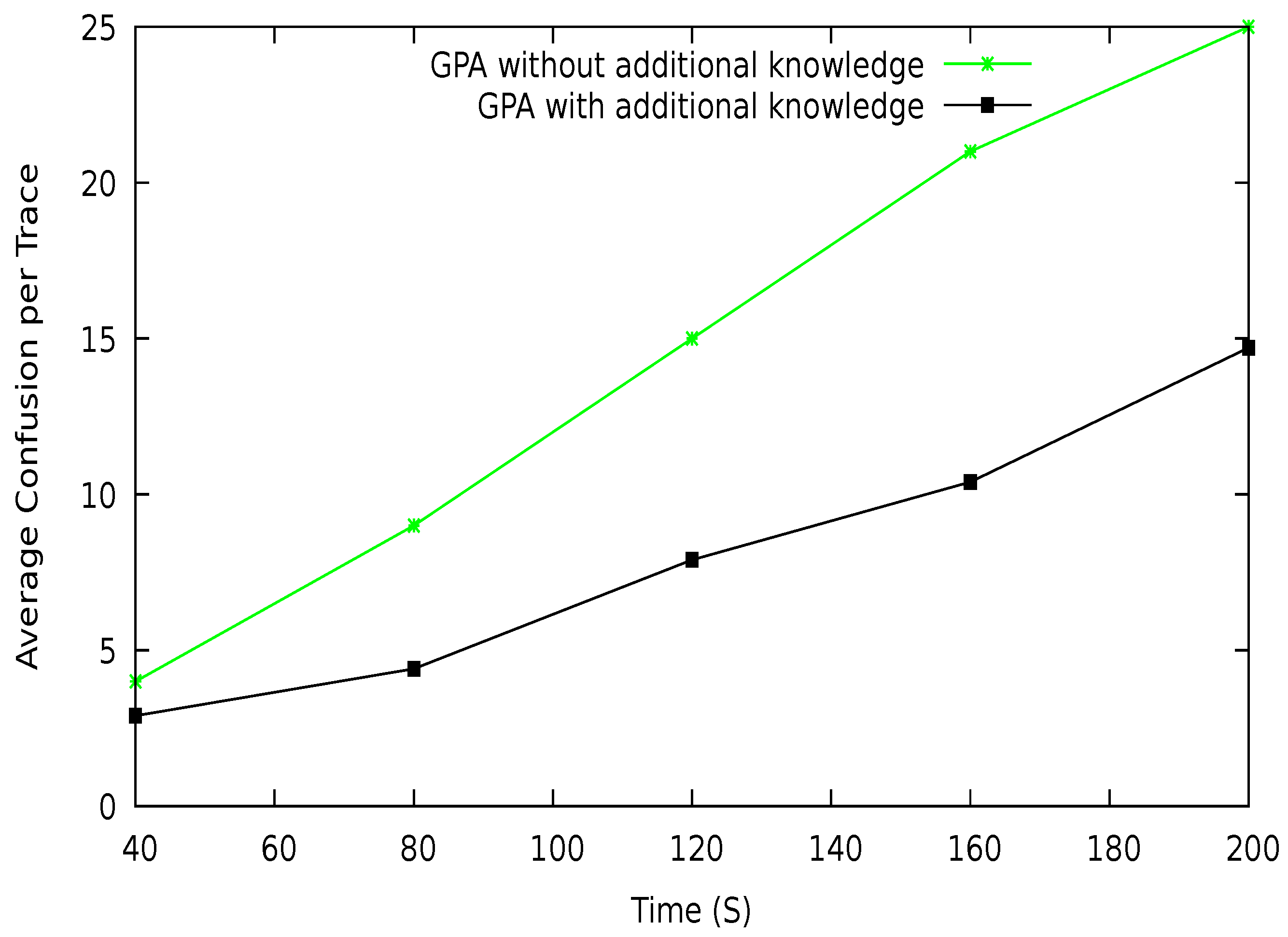
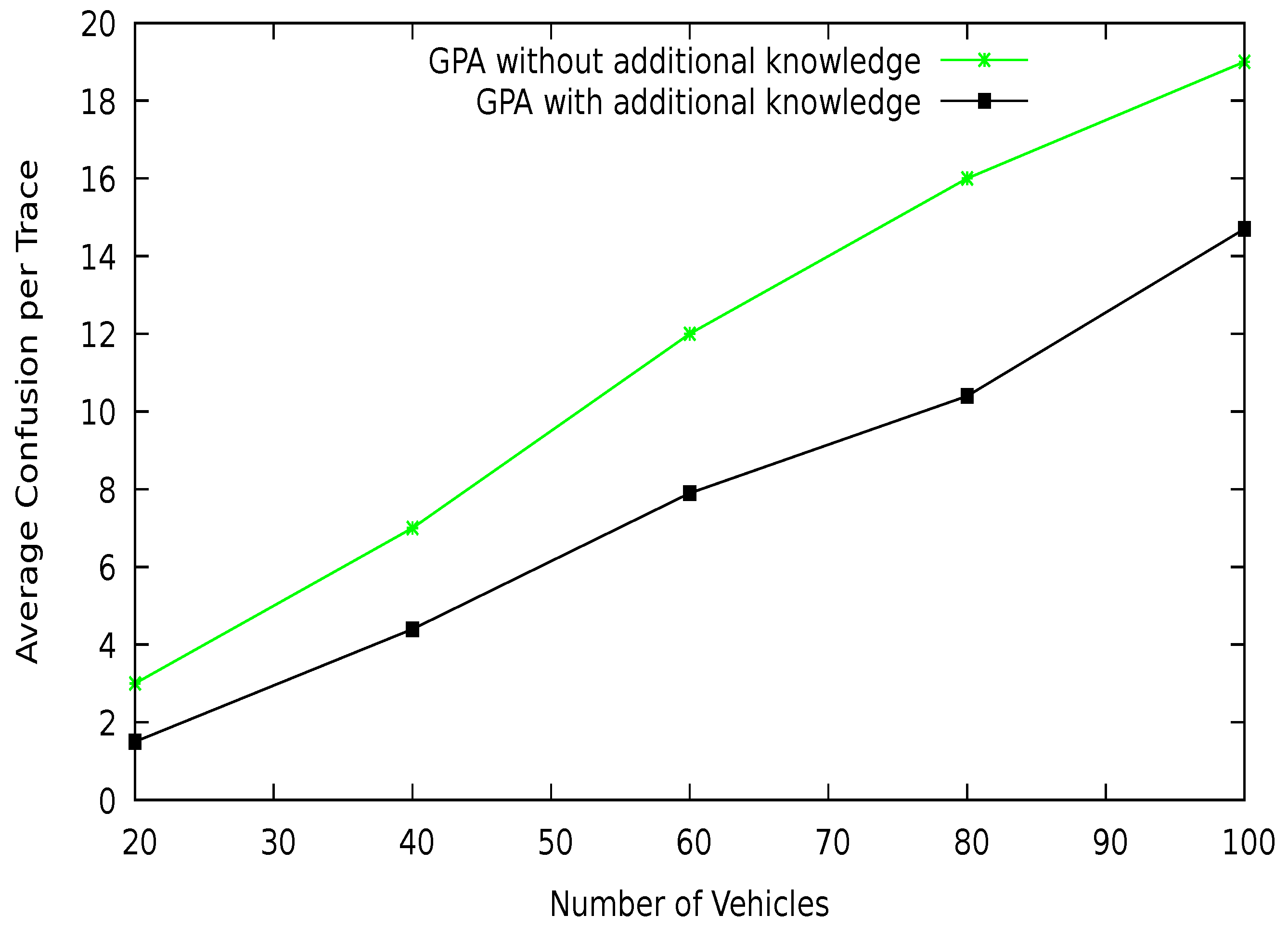
9.1. Protection against GPA
9.2. Impact on VANETs Applications
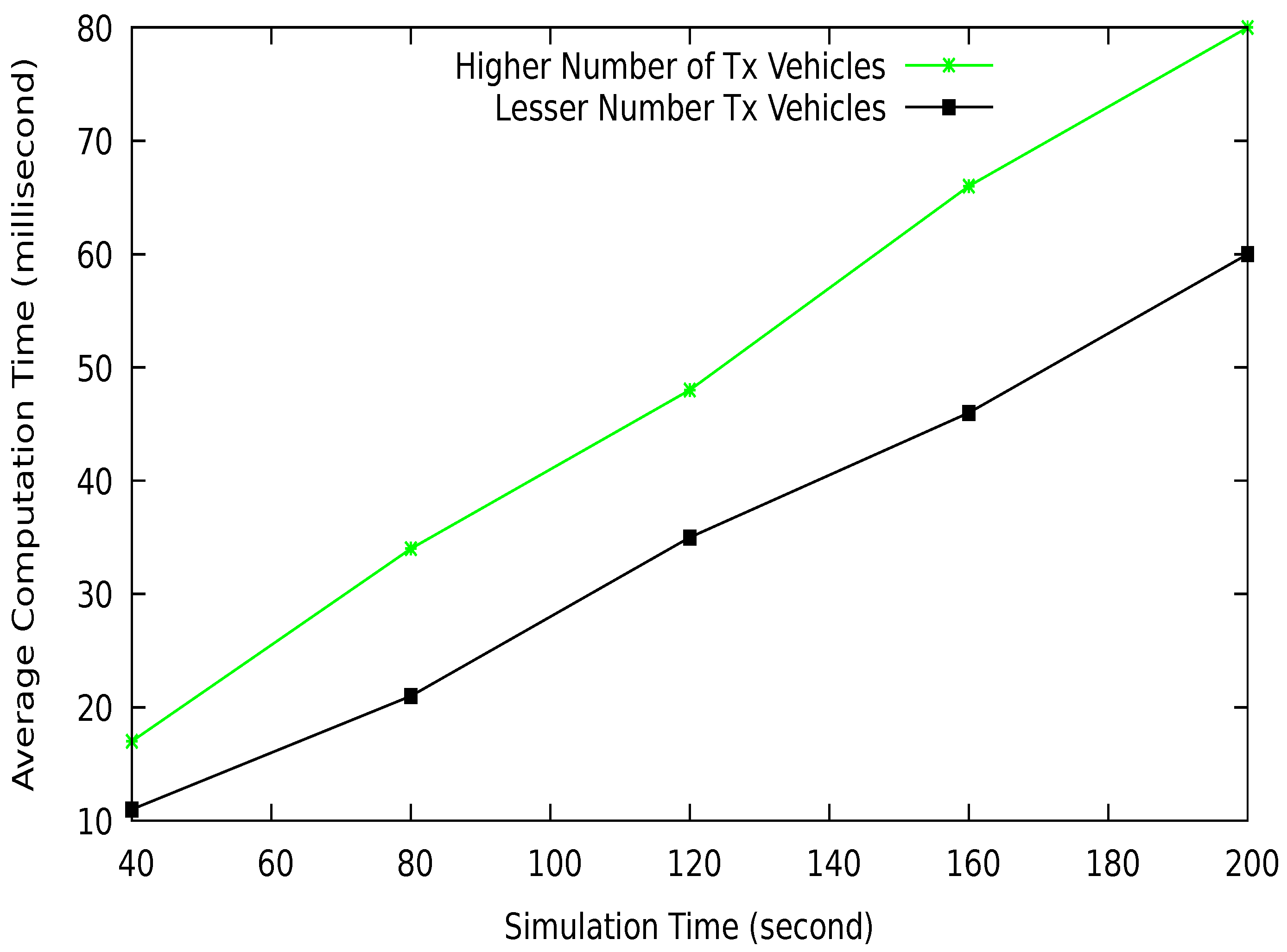
9.3. Computation Overhead
9.4. Privacy and Traffic Optimization
10. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Cunha, F.; Villas, L.; Boukerche, A.; Maia, G.; Viana, A.; Mini, R.A.; Loureiro, A.A. Data communication in VANETs: Protocols, applications and challenges. Ad Hoc Netw. 2016, 44, 90–103. [Google Scholar] [CrossRef]
- Liang, W.; Li, Z.; Zhang, H.; Wang, S.; Bie, R. Vehicular ad hoc networks: Architectures, research issues, methodologies, challenges, and trends. Int. J. Distrib. Sens. Netw. 2015, 11, 745303. [Google Scholar] [CrossRef]
- Cunha, F.D.D.; Boukerche, Z.; Villas, L.; Viana, A.C.; Loureiro, A.A.F. Data Communication in VANETs: A Survey, Challenges and Applications; [Research Report] RR-8498; INRIA Saclay: Palaiseau, France, 2014; pp. 1–26. [Google Scholar]
- Qu, F.; Wu, Z.; Wang, F.Y.; Cho, W. A security and privacy review of VANETs. IEEE Trans. Intell. Transp. Syst. 2015, 16, 2985–2996. [Google Scholar] [CrossRef]
- Engoulou, R.G.; Bellaïche, M.; Pierre, S.; Quintero, A. VANET security surveys. Comput. Commun. 2014, 44, 1–13. [Google Scholar] [CrossRef]
- Omar, H.A.; Lu, N.; Zhuang, W. Wireless access technologies for vehicular network safety applications. IEEE Netw. 2016, 30, 22–26. [Google Scholar] [CrossRef]
- Al-Sultan, S.; Al-Doori, M.M.; Al-Bayatti, A.H.; Zedan, H. A comprehensive survey on vehicular Ad Hoc network. J. Netw. Comput. Appl. 2014, 37, 380–392. [Google Scholar] [CrossRef]
- Kenney, J.B. Dedicated short-range communications (DSRC) standards in the United States. Proc. IEEE 2011, 99, 1162–1182. [Google Scholar] [CrossRef]
- Wang, S.; Yao, N.; Gong, N.; Gao, Z. A trigger-based pseudonym exchange scheme for location privacy preserving in VANETs. Peer-to-Peer Netw. Appl. 2018, 11, 548–560. [Google Scholar] [CrossRef]
- Ullah, I.; Wahid, A.; Shah, M.A.; Waheed, A. VBPC: Velocity based pseudonym changing strategy to protect location privacy of vehicles in VANET. In Proceedings of the 2017 International Conference on Communication Technologies (Comtech), Rawalpindi, Pakistan, 19–21 April 2017; pp. 132–137. [Google Scholar]
- Amro, B. Protecting Privacy in VANETs Using Mix Zones with Virtual Pseudonym Change. Int. J. Netw. Secur. Its Appl. 2018, 10, 11–21. [Google Scholar] [CrossRef]
- Memon, I.; Chen, L.; Arain, Q.A.; Memon, H.; Chen, G. Pseudonym changing strategy with multiple mix zones for trajectory privacy protection in road networks. Int. J. Commun. Syst. 2018, 31, 1–44. [Google Scholar] [CrossRef]
- Lu, R.; Lin, X.; Luan, T.H.; Liang, X.; Shen, X. Pseudonym changing at social spots: An effective strategy for location privacy in vanets. IEEE Trans. Veh. Technol. 2011, 61, 86–96. [Google Scholar] [CrossRef] [Green Version]
- Boualouache, A.; Senouci, S.M.; Moussaoui, S. Vlpz: The vehicular location privacy zone. Procedia Comput. Sci. 2016, 83, 369–376. [Google Scholar] [CrossRef] [Green Version]
- Boualouache, A.; Moussaoui, S. Urban pseudonym changing strategy for location privacy in VANETs. Int. J. Ad Hoc Ubiquitous Comput. 2017, 24, 49–64. [Google Scholar] [CrossRef]
- Ali, Q.; Zhongliang, A.; Imran, D. Location Privacy with Dynamic Pseudonym-Based Multiple Mix-Zones Generation over Road Networks. Wirel. Pers. Commun. 2017, 97, 3645–3671. [Google Scholar]
- Yu, R.; Kang, J.; Huang, X.; Xie, S.; Zhang, Y.; Gjessing, S. MixGroup: Accumulative pseudonym exchanging for location privacy enhancement in vehicular social networks. IEEE Trans. Dependable Secur. Comput. 2015, 13, 93–105. [Google Scholar] [CrossRef]
- Zhang, L. OTIBAAGKA: A new security tool for cryptographic mix-zone establishment in vehicular ad hoc networks. IEEE Trans. Inf. Forensics Secur. 2017, 12, 2998–3010. [Google Scholar] [CrossRef]
- Mei, Y.; Jiang, G.; Zhang, W.; Cui, Y. A collaboratively hidden location privacy scheme for VANETs. Int. J. Distrib. Sens. Netw. 2014, 10, 473151. [Google Scholar] [CrossRef]
- Wasef, A.; Shen, X.S. REP: Location privacy for VANETs using random encryption periods. Mob. Netw. Appl. 2010, 15, 172–185. [Google Scholar] [CrossRef]
- Sampigethaya, K.; Huang, L.; Li, M.; Poovendran, R.; Matsuura, K.; Sezaki, K. CARAVAN: Providing Location Privacy for VANET; Department of Electrical Engineering, University of Washington: Seattle, WA, USA, 2005. [Google Scholar]
- Khacheba, I.; Yagoubi, M.B.; Lagraa, N.; Lakas, A. Location privacy scheme for VANETs. In Proceedings of the 2017 International Conference on Selected Topics in Mobile and Wireless Networking (MoWNeT), Avignon, France, 17–19 May 2017; pp. 1–6. [Google Scholar]
- Amro, B.; Saygin, Y.; Levi, A. Enhancing privacy in collaborative traffic-monitoring systems using autonomous location update. IET Intell. Transp. Syst. 2013, 7, 388–395. [Google Scholar] [CrossRef]
- Guo, N.; Ma, L.; Gao, T. Independent Mix Zone for Location Privacy in Vehicular Networks. IEEE Access 2018, 6, 16842–16850. [Google Scholar] [CrossRef]
- Boualouache, A.; Moussaoui, S. TAPCS: Traffic-aware pseudonym changing strategy for VANETs. Peer-to-Peer Netw. Appl. 2017, 10, 1008–1020. [Google Scholar] [CrossRef]
- Zidani, F.; Semchedine, F.; Ayaida, M. Estimation of Neighbors Position privacy scheme with an Adaptive Beaconing approach for location privacy in VANETs. Comput. Electr. Eng. 2018, 71, 359–371. [Google Scholar] [CrossRef]
- Sampigethaya, K.; Li, M.; Huang, L.; Poovendran, R. AMOEBA: Robust location privacy scheme for VANET. IEEE J. Sel. Areas Commun. 2007, 25, 1569–1589. [Google Scholar] [CrossRef] [Green Version]
- Buttyán, L.; Holczer, T.; Weimerskirch, A.; Whyte, W. Slow: A practical pseudonym changing scheme for location privacy in vanets. In Proceedings of the 2009 IEEE Vehicular Networking Conference (VNC), Tokyo, Japan, 28–30 October 2009; pp. 1–8. [Google Scholar]
- Wei, Y.-C.; Chen, Y.-M. Safe Distance Based Location Privacy in Vehicular Networks. In Proceedings of the 2010 IEEE 71st Vehicular Technology Conference, Taipei, Taiwan, 16–19 May 2010; pp. 1–5. [Google Scholar]
- Emara, K.; Woerndl, W.; Schlichter, J. CAPS: Context-aware Privacy Scheme for VANET Safety Applications. In Proceedings of the 8th ACM Conference on Security & Privacy in Wireless and Mobile Networks, New York, NY, USA, 22–26 June 2015; pp. 21:1–21:12. [Google Scholar]
- Khacheba, I.; Yagoubi, M.B.; Lagraa, N.; Lakas, A. CLPS: Context-based location privacy scheme for VANETs. Int. J. Ad Hoc Ubiquitous Comput. 2018, 29, 141–159. [Google Scholar] [CrossRef]
- Singh, P.K.; Gowtham, S.N.; Tamilselvan, S.; Nandi, S. CPESP: Cooperative pseudonym exchange and scheme permutation to preserve location privacy in VANETs. Veh. Commun. 2019, 20, 100183. [Google Scholar] [CrossRef]
- Arain, Q.A.; Memon, I.; Deng, Z.; Memon, M.H.; Mangi, F.A.; Zubedi, A. Location monitoring approach: Multiple mix-zones with location privacy protection based on traffic flow over road networks. Multimed. Tools Appl. 2018, 77, 5563–5607. [Google Scholar] [CrossRef]
- Deng, X.; Xin, X.; Gao, T. A location privacy protection scheme based on random encryption period for VSNs. J. Ambient. Intell. Humaniz. Comput. 2020, 11, 1351–1359. [Google Scholar] [CrossRef]
- Weerasinghe, H.; Fu, H.; Leng, S.; Zhu, Y. Enhancing unlinkability in vehicular ad hoc networks. In Proceedings of the 2011 IEEE International Conference on Intelligence and Security Informatics, Beijing, China, 10–12 July 2011. [Google Scholar]
- Ni, J.; Lin, X.; Shen, X. Privacy-preserving data forwarding in VANETs: A personal-social behavior based approach. In Proceedings of the GLOBECOM 2017—2017 IEEE Global Communications Conference, Singapore, 4–8 December 2017; pp. 1–6. [Google Scholar]
- Huanguo, Z.; Yi, M. A Privacy Protection Scheme in VANETs Based on Group Signature; Springer: Singapore, 2019; Volume 10. [Google Scholar]
- Ullah, I.; Shah, M.A.; Khan, A.; Maple, C.; Waheed, A. Virtual Pseudonym-Changing and Dynamic Grouping Policy for Privacy Preservation in VANETs. Sensors 2021, 21, 3077. [Google Scholar] [CrossRef] [PubMed]
- Hoh, B.; Gruteser, M. Protecting location privacy through path confusion. In Proceedings of the First International Conference on Security and Privacy for Emerging Areas in Communications Networks (SECURECOMM’05), Athens, Greece, 5–9 September 2005; pp. 194–205. [Google Scholar]
- Karim, E. Location privacy in vehicular networks. In Proceedings of the 2013 IEEE 14th International Symposium on “A World of Wireless, Mobile and Multimedia Networks” (WoWMoM), Madrid, Spain, 4–7 June 2013. [Google Scholar]
- Chaudhary, B.; Singh, K. A Dummy Location Generation Model for Location Privacy in Vehicular Ad hoc Networks. In Proceedings of the International Conference on Innovative Computing and Communications, New Delhi, India, 20–21 February 2021; Springer: Singapore, 2021; pp. 1–10. [Google Scholar]
- Cui, J.; Wen, J.; Han, S.; Zhong, H. Efficient Privacy-preserving Scheme for Real-time Location Data in Vehicular Ad-hoc Network. IEEE Internet Things J. 2018, 4662, 1–8. [Google Scholar] [CrossRef]
- Yu, H.; Li, G.; Wu, J.; Ren, X.; Cao, J. A location-based path privacy protection scheme in internet of vehicles. In Proceedings of the IEEE INFOCOM 2020—IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), Toronto, ON, Canada, 6–9 July 2020; pp. 665–670. [Google Scholar]
- Zhong, H.; Ni, J.; Cui, J.; Zhang, J.; Liu, L. Personalized Location Privacy Protection Based on Vehicle Movement Regularity in Vehicular Networks. IEEE Syst. J. 2021. [Google Scholar] [CrossRef]
- Ullah, I.; Shah, M.A.; Khan, A.; Jeon, G. Privacy-preserving multilevel obfuscation scheme for vehicular network. Trans. Emerg. Telecommun. Technol. 2021, 32, e4204. [Google Scholar] [CrossRef]
- Chen, Z.; Bao, X.; Ying, Z.; Liu, X.; Zhong, H. Differentially private location protection with continuous time stamps for VANETs. In Proceedings of the International Conference on Algorithms and Architectures for Parallel Processing, Guangzhou, China, 15–17 November 2018; Springer: Cham, Switzerland, 2018. [Google Scholar]
- Wang, W.; Min, M.; Xiao, L.; Chen, Y.; Dai, H. Protecting Semantic Trajectory Privacy for VANET with Reinforcement Learning. In Proceedings of the ICC 2019–2019 IEEE International Conference on Communications (ICC), Shanghai, China, 20–24 May 2019; pp. 1–5. [Google Scholar]
- Benarous, L.; Kadri, B.; Boudjit, S. Alloyed Pseudonym Change Strategy for Location Privacy in VANETs. In Proceedings of the 2020 IEEE 17th Annual Consumer Communications & Networking Conference (CCNC), Las Vegas, NV, USA, 10–13 January 2020; pp. 1–6. [Google Scholar]
- Chen, Y.; Lo, T.; Lee, C.; Pang, A. Efficient Pseudonym Changing Schemes for Location Privacy Protection in VANETs. In Proceedings of the 2013 International Conference on Connected Vehicles and Expo (ICCVE), Las Vegas, NV, USA, 2–6 December 2013; pp. 937–938. [Google Scholar]
- Corser, G.; Fu, H.; Shu, T. Endpoint Protection Zone (EPZ): Protecting LBS User Location Privacy Against Deanonymisation and Collusion in Vehicular Networks. In Proceedings of the 2013 International Conference on Connected Vehicles and Expo (ICCVE), Las Vegas, NV, USA, 2–6 December 2013; pp. 369–374. [Google Scholar]
- Corser, G.; Fu, H.; Shu, T.; D’Errico, P.; Ma, W.; Leng, S.; Zhu, Y. Privacy-by-decoy: Protecting location privacy against collusion and deanonymisation in vehicular location based services. In Proceedings of the 2014 IEEE Intelligent Vehicles Symposium Proceedings, Dearborn, MI, USA, 8–11 June 2014; pp. 1030–1036. [Google Scholar]
- Gerlach, M.; Felix, G. Privacy in VANETs using Changing Pseudonyms—Ideal and Real. In Proceedings of the IEEE 65th Vehicular Technology Conference-VTC2007-Spring, Dublin, Ireland, 22–25 April 2007; pp. 2521–2525. [Google Scholar]
- Freudiger, J.; Raya, M.; Félegyházi, M.; Papadimitratos, P.; Hubaux, J.-P. Mix-Zones for Location Privacy in Vehicular Networks. In Proceedings of the Association for Computing Machinery (ACM) Workshop on Wireless Networking for Intelligent Transportation Systems (WiN-ITS), Vancouver, BC, Canada, 14–17 August 2007; Volume 51, pp. 1–7. [Google Scholar]
- Carianha, A.M.; Barreto, L.P.; Lima, G. Improving Location Privacy in Mix-Zones for VANETs. In Proceedings of the 30th IEEE International Performance Computing and Communications Conference, Orlando, FL, USA, 17–19 November 2011; pp. 1–6. [Google Scholar]
- Ying, B.; Makrakis, D.; Mouftah, H.T. Dynamic mix-zone for location privacy in vehicular networks. IEEE Commun. Lett. 2013, 17, 1524–1527. [Google Scholar] [CrossRef]
- Ying, B. Pseudonym Changes Scheme based on Candidate- Location-List in Vehicular Networks. In Proceedings of the 2015 IEEE International Conference on Communications (ICC), London, UK, 8–12 June 2015; pp. 7292–7297. [Google Scholar]
- Boualouache, A.; Moussaoui, S. S2si: A practical pseudonym changing strategy for location privacy in vanets. In Proceedings of the 2014 International Conference on Advanced Networking Distributed Systems and Applications, Bejaia, Algeria, 17–19 June 2014; pp. 70–75. [Google Scholar]
- Ying, B.; Makrakis, D.; Hou, Z. Motivation for protecting selfish vehicles’ location privacy in vehicular networks. IEEE Trans. Veh. Technol. 2015, 64, 5631–5641. [Google Scholar] [CrossRef]
- Bidi, Y.; Makrakis, D. Reputation-based Pseudonym Change for Location Privacy in Vehicular Networks. In Proceedings of the 2015 IEEE International Conference on Communications (ICC), London, UK, 8–12 June 2015; pp. 7041–7046. [Google Scholar]
- Boualouache, A.; Senouci, S.; Moussaoui, S. Towards an Effi cient Pseudonym Management and Changing Scheme for Vehicular Ad-Hoc Networks. In Proceedings of the 2016 IEEE Global Communications Conference (GLOBECOM), Washington, DC, USA, 4–8 December 2016; pp. 1–7. [Google Scholar]
- Zuberi, R.S.; Ahmad, S.N. Secure Mix-Zones for Privacy Protection of Road Network Location Based Services Users. J. Comput. Netw. Commun. 2016, 2016. [Google Scholar] [CrossRef] [Green Version]
- Guo, N.; Ma, L.; Gao, T. A Location Privacy-Preserving Scheme for VANETs Based on Virtual Mix Zone. 2017; Volume 3, pp. 1–8.
- Memon, I.; Mirza, H.T.; Arain, Q.A.; Memon, H. Multiple mix zones de-correlation trajectory privacy model for road network. Telecommun. Syst. 2019, 70, 557–582. [Google Scholar] [CrossRef]
- Kalaiarasy, C.; Sreenath, N.; Amuthan, A. An effective variant ring signature-based pseudonym changing mechanism for privacy preservation in mixed zones of vehicular networks. J. Ambient Intell. Humaniz. Comput. 2020, 11, 1669–1681. [Google Scholar] [CrossRef]
- Wahid, A.; Yasmeen, H.; Shah, M.A.; Alam, M. Holistic approach for coupling privacy with safety in VANETs. Comput. Netw. 2019, 148, 214–230. [Google Scholar] [CrossRef]
- Sajjad, H.; Kanwal, T.; Anjum, A.; Malik, R. An efficient privacy preserving protocol for. Comput. Secur. 2019, 86, 358–371. [Google Scholar] [CrossRef]
- Schoch, E.; Kargl, F.; Leinmüller, T.; Schlott, S.; Papadimitratos, P. Impact of pseudonym changes on geographic routing in vanets. In European Workshop on Security in Ad-Hoc and Sensor Networks; Springer: Berlin/Heidelberg, Germany, 2006; pp. 43–57. [Google Scholar]






| Symbol | Description |
|---|---|
| Reg-Request | Request for vehicle registration to TA |
| VRD | Vehicle registration data |
| AssignPool | Assign pseudonym pool to vehicles |
| PL | Pseudonym list |
| SM | Speed monitor |
| DC | Distance calculation |
| NS | Neighbor selection |
| NC | Neighbor count |
| NT | Neighbor threshold |
| SameID | Same vehicle (only one vehicle) |
| RC | Vehicle ready to change pseudonym |
| CPC | The cooperative pseudonym change process |
| ExpiryT | Pseudonym expiry time |
| PEP | Pseudonym exchange process |
| TxN | Transmission range neighbors |
| RSN | Random selection of neighbors |
| PE | Pseudonym exchange |
| BC | Broadcast beacon messages |
| LPN | Vehicle license plate number |
| Vehicle identity | |
| Pseudo IDs of a vehicle | |
| WT | Waiting time |
| Types | Description |
|---|---|
| (Reg-Request) | |
| (VRD) | |
| (Pseudo-Request) | |
| (PL) | |
| (Road-Condition) | |
| (SM) | |
| (DC) | |
| (NS) | |
| (NC) | |
| (NT) | |
| (SameID) | |
| (RC) | |
| (CPC) | |
| (PUpdate) | |
| (ExpiryT) | |
| (PEP) | |
| (PE) | |
| (BC) |
| Parameters | Value |
|---|---|
| Simulator | NS2, SUMO |
| MAP | OpenStreetMap |
| Routing protocol | AODV |
| Bit rate | 6 MBPS |
| Simulation time | 400 s |
| Number of Vehicles | 200 |
| Road area | 5249 × 5053 m |
| Speed range | 0–10 m/s |
| MAC protocol | IEEE 802.11p |
| Transmission range | 500 m |
| Beacon interval | 300 ms |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ullah, I.; Shah, M.A.; Khan, A.; Maple, C.; Waheed, A.; Jeon, G. A Distributed Mix-Context-Based Method for Location Privacy in Road Networks. Sustainability 2021, 13, 12513. https://doi.org/10.3390/su132212513
Ullah I, Shah MA, Khan A, Maple C, Waheed A, Jeon G. A Distributed Mix-Context-Based Method for Location Privacy in Road Networks. Sustainability. 2021; 13(22):12513. https://doi.org/10.3390/su132212513
Chicago/Turabian StyleUllah, Ikram, Munam Ali Shah, Abid Khan, Carsten Maple, Abdul Waheed, and Gwnaggil Jeon. 2021. "A Distributed Mix-Context-Based Method for Location Privacy in Road Networks" Sustainability 13, no. 22: 12513. https://doi.org/10.3390/su132212513
APA StyleUllah, I., Shah, M. A., Khan, A., Maple, C., Waheed, A., & Jeon, G. (2021). A Distributed Mix-Context-Based Method for Location Privacy in Road Networks. Sustainability, 13(22), 12513. https://doi.org/10.3390/su132212513