Research on the Relationship between the Individual Characteristics of Electric Bike Riders and Illegal Speeding Behavior: A Questionnaire-Based Study


Abstract
1. Introduction
2. Method
2.1. Survey Design
2.2. Demographic Information
2.3. Speed Selection Behavior
2.4. Data Collection
2.5. Reliability and Validity Tests
2.6. Disaggregate Model and Riding Selection Behavior
2.7. The Selection of the Behavioral Model
2.7.1. Building the Model
2.7.2. Determining Alternative Parts and Affected Factors
3. Results and Discussion
3.1. Relationship between a Rider’s Personal Attributes and Riding Speed
3.1.1. Model Influencing Factor Calibration
3.1.2. Utility Function
3.2. Analysis of the Calculation Results
3.2.1. Gender and Age
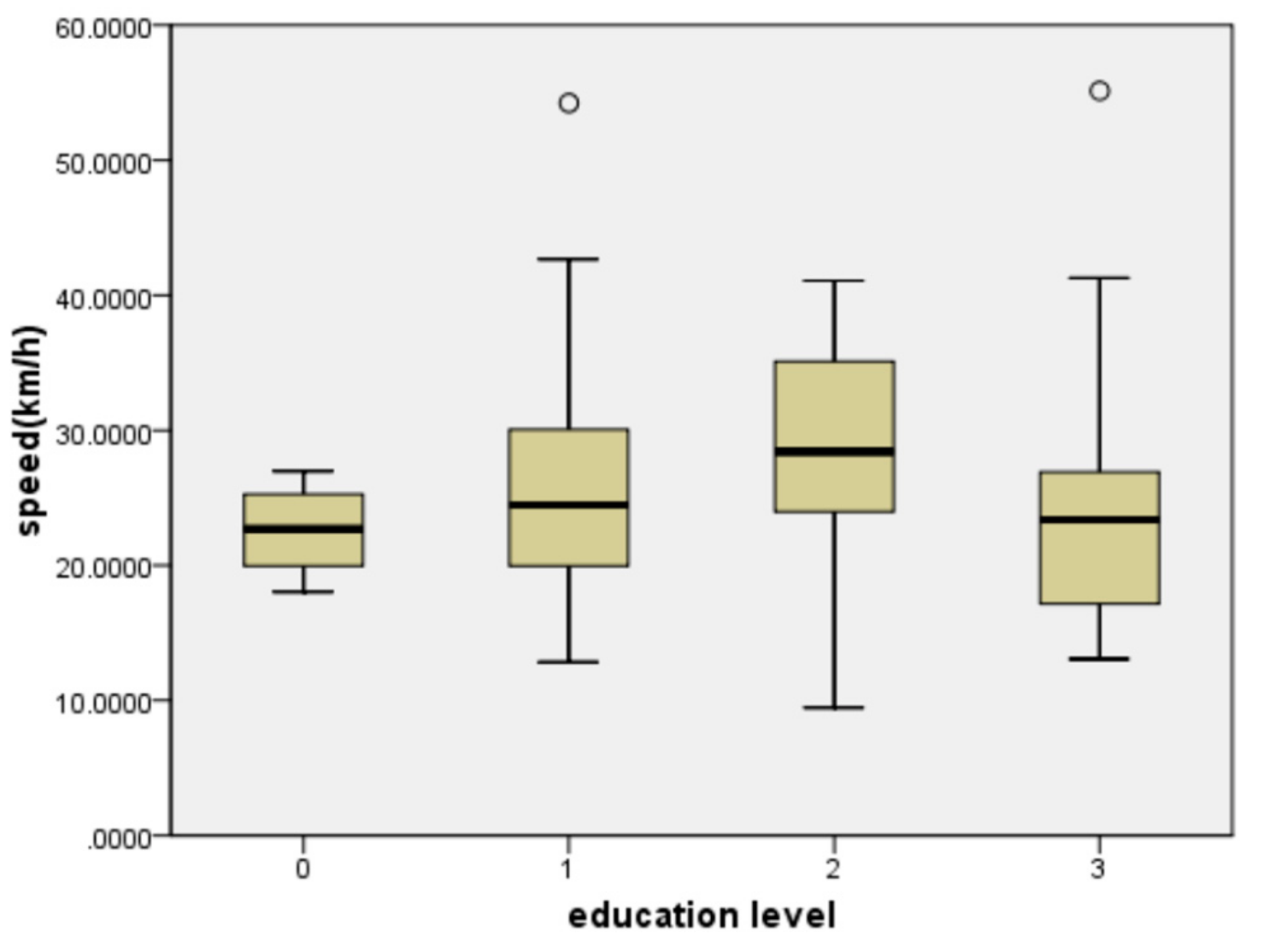
3.2.2. Education level and Driving Experience
3.2.3. Personality and Vision Correction
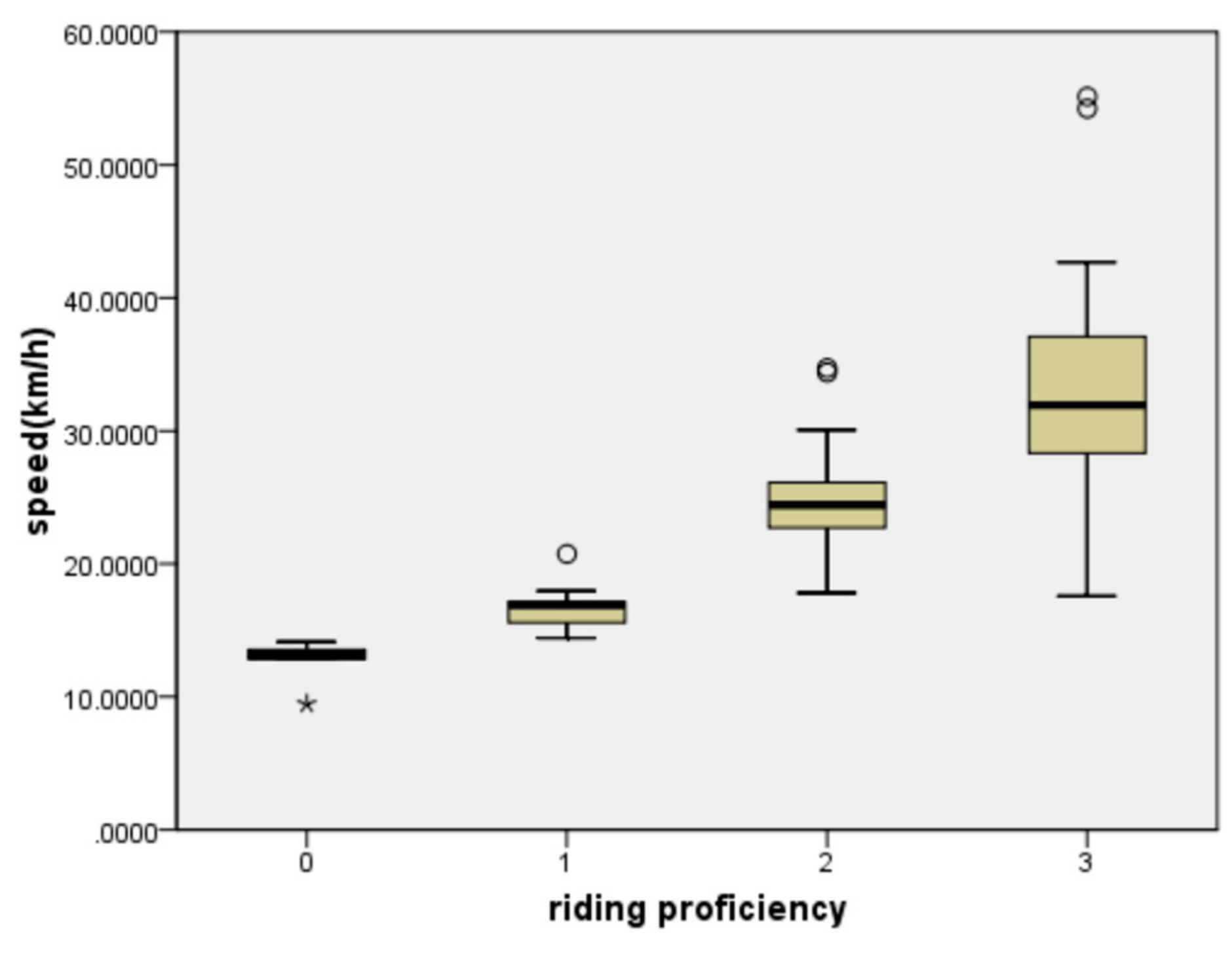
3.2.4. Occupational and Cycling Proficiency
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Cherry, C.; Cervero, R. Use characteristics and mode choice behavior of electric bike users in China. Transp. Policy 2007, 14, 247–257. [Google Scholar] [CrossRef]
- Guo, Y.; Wu, Y.; Lu, J.; Zhou, J. Modeling the unobserved heterogeneity in e-bike collision severity using full Bayesian random parameters multinomial logit regression. Sustainability 2019, 11, 2071. [Google Scholar] [CrossRef]
- Guo, Y.; Li, Z.; Wu, Y.; Xu, C. Evaluating factors affecting electric bike users’ registration of license plate in China using Bayesian approach. Transp. Res. Part F Traffic Psychol. Behav. 2018, 59, 212–221. [Google Scholar] [CrossRef]
- Ma, C.; Yang, D.; Zhou, J.; Feng, Z.; Yuan, Q. Risk riding behaviors of urban e-bikes: A literature review. Int. J. Environ. Res. Public Health 2019, 16, 2308. [Google Scholar] [CrossRef] [PubMed]
- Traffic Management Bureau of Ministry of Public Security. Statistics of Road Traffic Accidents in PRC (2015); Traffic Management Bureau of Ministry of Public Security: Beijing, China, 2016.
- Traffic Management Bureau of Ministry of Public Security. Statistics of Road Traffic Accidents in PRC (2016); Traffic Management Bureau of Ministry of Public Security: Beijing, China, 2017.
- Zhu, J.; Dai, S.; Zhu, X. Accedent characteristics and safety method of electric cyclists. Urban Traffic 2018, 16, 15–20. [Google Scholar]
- Li, Q.; Yu, S.; Chen, T.; Bishai, D.M.; Bachani, A.; Hyder, A.A. Road safety risk factors for non-motorised vehicle users in a Chinese city: An observational study. Inj. Prev. 2019, 2018, 1–10. [Google Scholar] [CrossRef] [PubMed]
- Haustein, S.; Møller, M. E-bike safety: Individual-level factors and incident characteristics. J. Transp. Health. 2016, 3, 386–394. [Google Scholar] [CrossRef]
- Yan, X.; He, J.; King, M.; Hang, W.; Zhou, B. Electric bicycle cost calculation models and analysis based on the social perspective in China. Environ. Sci. Pollut. Res. 2018, 25, 20193–20205. [Google Scholar] [CrossRef]
- Bai, L.; Chan, C.; Liu, P.; Xu, C. Identifying factors affecting the safety of mid-block bicycle lanes considering mixed 2-wheeled traffic flow. Traffic Inj. Prev. 2017, 18, 761–766. [Google Scholar] [CrossRef]
- Wu, C.; Yao, L.; Zhang, K. The red-light running behavior of electric bike riders and cyclists at urban intersections in China: An observational study. Accid. Anal. Prev. 2012, 49, 186–192. [Google Scholar] [CrossRef]
- Schepers, J.P.; Fishman, E.; Den Hertog, P.; Wolt, K.K.; Schwab, A.L. The safety of electrically assisted bicycles compared to classic bicycles. Accid. Anal. Prev. 2014, 73, 174–180. [Google Scholar] [CrossRef] [PubMed]
- Petzoldt, T.; Schleinitz, K.; Heilmann, S.; Gehlert, T. Traffic conflicts and their contextual factors when riding conventional vs. e-bikes. Transp. Res. Part F Traffic Psychol. Behav. 2017, 46, 477–490. [Google Scholar] [CrossRef]
- Johnson, M.; Rose, G. Extending life on the bike: Electric bike use by older Australians. J. Transp. Health 2015, 2, 276–283. [Google Scholar] [CrossRef]
- Hu, F.; Lv, D.; Zhu, J.; Fang, H. Related risk factors for injury severity of e-bike and bicycle crashes in Hefei. Traffic Inj. Prev. 2014, 15, 319–323. [Google Scholar] [CrossRef]
- Chen, B. Study on Traffic Safety of Electric Bicycles Based on Traffic Conflict Technique; Southwest Jiaotong University: Chengdu, China, 2014. [Google Scholar]
- Xing, X.Y.; Xu, W.; Chen, Y.; Liu, Z.; Bian, Z.; Liu, Y. A roadside observation study of unsafe riding acts among e-bike riders in a city of Anhui Province. Chin. J. Dis. Control 2017, 21, 943–946,952. [Google Scholar]
- Wang, M.L. Safety Analysis of Elecreic Bicycle on Urban Road; Southwest Jiaotong University: Chengdu, China, 2010. [Google Scholar]
- Fu, Q.; Ma, G.Z. Study on Traffic Safety and Management of City E-Bike; Southwest Jiaotong University: Chengdu, China, 2016. [Google Scholar]
- Guo, Y.; Zhou, J.; Wu, Y.; Chen, J. Evaluation of factors affecting e-bike involved crash and e-bike license plate use in China using a bivariate probit model. J. Adv. Transp. 2017, 2017, 1–12. [Google Scholar] [CrossRef]
- Dong, S.; Zhou, J.; Tang, K. Safety effect of flashing green on e-bikes’ stop-go decision-making behavior. China Saf. Sci. J. 2015, 25, 27–33. [Google Scholar]
- Zhang, Y.Q.; Wu, C.X. The effects of sunshields on red light running behavior of cyclists and electric bike riders. Accid. Anal. Prev. 2013, 52, 210–218. [Google Scholar] [CrossRef]
- Chen, F.; Chen, S. Injury severities of truck drivers in single-and multi-vehicle accidents on rural highways. Accid. Anal. Prev. 2011, 43, 1677–1688. [Google Scholar] [CrossRef]
- GB17761-2018, Electric Bicycle Safety Technical Specifications; State Market Supervisory Administration; China National Standardization Administration: Beijing, China, 2018.
- Malyshkina, N.V.; Mannering, F.L. Markov switching multinomial Logit model: An application to accident-injury severities. Accid. Anal. Prev. 2009, 41, 829–838. [Google Scholar] [CrossRef]
- Yuan, H.; Feng, Z.X.; Jian, X.P.; Liu, J. Selection model of car parking facility in urban central region. J. Highw. Transp. Res. Dev. 2012, 29, 137–141. [Google Scholar]
- Feng, Z.X.; Liu, H.X.; Zhang, J.F. Selection model of trip modes for rural population. J. Traffic Transp. Eng. 2010, 10, 77–83. [Google Scholar]
- Ma, C.X.; He, R.C.; Zhang, W. Path optimization of taxi carpooling. PLoS ONE 2018, 13, e0203221. [Google Scholar] [CrossRef] [PubMed]
- Hao, W.; Wang, A.; Zhao, H. Developing a coordinated signal control system for urban ring road under the vehicle-infrastructure connected environment. IEEE Access 2018, 6, 52471–52478. [Google Scholar]
- Ma, C.X.; Hao, W.; Xiang, W.; Yan, W. The impact of aggressive driving behavior on driver injury severity at highway-rail grade crossings accidents. J. Adv. Transp. 2018, 2018, 9841498. [Google Scholar] [CrossRef]
- Chen, F.; Chen, S.; Ma, X. Analysis of hourly crash likelihood using unbalanced panel data mixed logit model and real-time driving environmental big data. J. Saf. Res. 2018, 65, 153–159. [Google Scholar] [CrossRef]
- Wang, C.; Xu, C.; Xia, J.; Qian, Z. Modeling faults among e-bike-related fatal crashes in China. Traffic Inj. Prev. 2017, 18, 175–181. [Google Scholar] [CrossRef]
- Cherry, C.; Yang, H.; Jones, L.; He, M. Dynamics of electric bike ownership and use in Kunming, China. Transp. Policy 2016, 45, 127–135. [Google Scholar] [CrossRef]
- Shen, Q.; Chen, P.; Pan, H. Factors affecting car ownership and mode choice in rail transit-supported suburbs of a large Chinese city. Transp. Res. Part A Policy Pract. 2016, 94, 31–44. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
| Personal Characteristics | The Number of E-Bike Riders | |||
|---|---|---|---|---|
| Gender | Male riders | Female riders | ||
| 310 | 40 | |||
| Age | 18–30 | 30–45 | 45–60 | >60 |
| 108 | 142 | 81 | 19 | |
| Education level | Primary school and below | Junior high school | High school | University or above |
| 27 | 121 | 157 | 45 | |
| Driving age | ≤1 year | 1–3 year | 3–5 year | ≥5 year |
| 21 | 180 | 122 | 27 | |
| Character | Melancholic temperament | Phlegmatic temperament | Sanguineous temperament | Choleric temperament |
| 1 | 129 | 149 | 71 | |
| Job/occupation | Students | In-service staff | Self-employed | Retirees |
| 11 | 179 | 141 | 19 | |
| Vision correction | Yes | No | ||
| 285 | 65 | |||
| Cycling proficiency | Skilled | More skilled | Average | Beginner |
| 130 | 189 | 25 | 6 | |
| Speed Behavior Selection Interval | A | B | C | D |
|---|---|---|---|---|
| Number of riders | 10 | 133 | 147 | 60 |
| Average speed | 13.3037 | 20.7137 | 28.8339 | 40.7376 |
| Maximum speed average | 14.5066 | 24.9462 | 34.9749 | 55.1362 |
| Influencing Factors | Variables | Explanation |
|---|---|---|
| Gender | X1 | Male is 1 and female is 0 |
| Age | X2 | Divided into four levels: 18–30 years old, 30–45 years old, 45–60 years old, and 60 years old or older; respectively, the values are 0, 1, 2, and 3 |
| Educational level | X3 | Divided into four levels: Primary school and below, junior high school, high school, university and above; respectively, the values are 0, 1, 2, and 3 |
| Driving age | X4 | Time of actually riding an e-bike |
| Character | X5 | Divided into four levels: Melancholic temperament, phlegmatic temperament, sanguine temperament, choleric temperament, with values 0, 1, 2, and 3 |
| Job/occupation | X6 | Divided into four levels: Students, incumbents, freelancers, and retirees (others) have values of 0, 1, 2, and 3, respectively |
| Vision correction | X7 | Dummy variable is 1 if vision is corrected and 0 otherwise |
| Cycling proficiency | X8 | Divided into four levels: Novice, general, more skilled, skilled; respectively, the values are 0, 1, 2, and 3 |
| Influencing Factors | Variable | Parameter Value | Standard Deviation | t-Test Value |
|---|---|---|---|---|
| Gender | X1 | −0.691 | 0.321 | 16.944 |
| Age | X2 | 1.036 | 0.870 | 6.419 |
| Educated level | X3 | 1.591 | 0.803 | 22.773 |
| Driving age | X4 | −1.550 | 0.722 | 26.951 |
| Characteristic | X5 | 0.702 | 0.744 | 26.472 |
| Job occupation | X6 | 0.699 | 0.649 | 28.670 |
| Whether to correct vision | X7 | 0.140 | 0.393 | 4.975 |
| Cycling proficiency | X8 | 6.246 | 0.677 | 25.466 |
| Model | R | R2 | Adjusted R2 | Error in Standard Estimates |
|---|---|---|---|---|
| 1 | 0.745 | 0.554 | 0.515 | 5.925 |
| Influencing Factors | Variable | Interval | |||
|---|---|---|---|---|---|
| A | B | C | D | ||
| Gender | X1 | −0.691 | −0.691 | ||
| Age | X2 | 1.036 | 1.036 | ||
| Education level | X3 | 1.591 | 1.591 | 1.591 | |
| Driving age | X4 | −1.550 | −1.550 | ||
| Character | X5 | 0.702 | 0.702 | 0.702 | 0.702 |
| Job/occupation | X6 | 0.699 | 0.699 | ||
| Vision correction | X7 | 0.140 | 0.140 | ||
| Cycling proficiency | X8 | 6.246 | 6.246 | 6.246 | |
| Speed Selection Behavior Interval | Selection Probability | Gender | Age | ||||
|---|---|---|---|---|---|---|---|
| Parameter Values | Average Values | Elasticity | Parameter Values | Average Values | Elasticity | ||
| A | 0.339 | −0.691 | 0.923 | −0.422 | 1.036 | 0.900 | 0.616 |
| B | 0.057 | −0.691 | 0.824 | −0.537 | 1.036 | 0.978 | 0.955 |
| C | 0.310 | −0.691 | 0.938 | −0.447 | 1.036 | 1.054 | 0.754 |
| D | 0.294 | −0.691 | 1.000 | −0.488 | 1.036 | 1.117 | 0.817 |
| Speed Selection Behavior Interval | Selection Probability | Education Level | Driving Age | ||||
|---|---|---|---|---|---|---|---|
| Parameter Values | Average Values | Elasticity | Parameter Values | Average Values | Elasticity | ||
| A | 0.339 | 1.591 | 1.500 | 1.577 | −1.550 | 1.500 | −1.537 |
| B | 0.057 | 1.591 | 1.657 | 2.484 | −1.550 | 1.410 | −2.061 |
| C | 0.310 | 1.591 | 1.649 | 1.810 | −1.550 | 1.446 | −1.547 |
| D | 0.294 | 1.591 | 1.483 | 1.667 | −1.550 | 1.467 | −1.606 |
| Speed Selection Behavior Interval | Selection Probability | Personality | Corrected Visual Acuity | ||||
|---|---|---|---|---|---|---|---|
| Parameter Values | Average Values | Elasticity | Parameter Values | Average Values | Elasticity | ||
| A | 0.339 | 0.795 | 1.500 | 0.788 | 0.140 | 0.100 | 0.009 |
| B | 0.057 | 0.795 | 1.687 | 1.264 | 0.140 | 0.216 | 0.029 |
| C | 0.310 | 0.795 | 1.865 | 1.023 | 0.140 | 0.196 | 0.019 |
| D | 0.294 | 0.795 | 2.050 | 1.151 | 0.140 | 0.117 | 0.012 |
| Speed Selection Behavior Interval | Selection Probability | Job Occupation | Cycling Proficiency | ||||
|---|---|---|---|---|---|---|---|
| Parameter Values | Average Values | Elasticity | Parameter Values | Average Values | Elasticity | ||
| A | 0.339 | 0.899 | 1.700 | 1.010 | 6.246 | 0.800 | 3.302 |
| B | 0.057 | 0.899 | 1.358 | 1.151 | 6.246 | 2.045 | 12.038 |
| C | 0.310 | 0.899 | 1.486 | 0.922 | 6.246 | 2.405 | 10.370 |
| D | 0.294 | 0.899 | 1.633 | 1.037 | 6.246 | 2.533 | 11.177 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, C.; Zhou, J.; Yang, D.; Fan, Y. Research on the Relationship between the Individual Characteristics of Electric Bike Riders and Illegal Speeding Behavior: A Questionnaire-Based Study. Sustainability 2020, 12, 799. https://doi.org/10.3390/su12030799
Ma C, Zhou J, Yang D, Fan Y. Research on the Relationship between the Individual Characteristics of Electric Bike Riders and Illegal Speeding Behavior: A Questionnaire-Based Study. Sustainability. 2020; 12(3):799. https://doi.org/10.3390/su12030799
Chicago/Turabian StyleMa, Changxi, Jibiao Zhou, Dong Yang, and Yuanyuan Fan. 2020. "Research on the Relationship between the Individual Characteristics of Electric Bike Riders and Illegal Speeding Behavior: A Questionnaire-Based Study" Sustainability 12, no. 3: 799. https://doi.org/10.3390/su12030799
APA StyleMa, C., Zhou, J., Yang, D., & Fan, Y. (2020). Research on the Relationship between the Individual Characteristics of Electric Bike Riders and Illegal Speeding Behavior: A Questionnaire-Based Study. Sustainability, 12(3), 799. https://doi.org/10.3390/su12030799