A Neural Network-Based Sustainable Data Dissemination through Public Transportation for Smart Cities




Abstract
1. Introduction
- We obtained the characterizations of the public transport bus systems that currently exist and determined bus daily movement patterns to form a data transmission network named as neural network-based sustainable data dissemination system (NESUDA).
- We applied the advanced neural network algorithm to analyze the arrival time based on historical data. We analyzed the difference between scheduled and predicted arrival times to estimate the accuracy of utilizing public buses for data dissemination. The Auckland transport data set was used to validate our model.
- We proposed a data dissemination algorithm using data scheduling onto buses as per their dwell time at each passing stop and stopping stop.
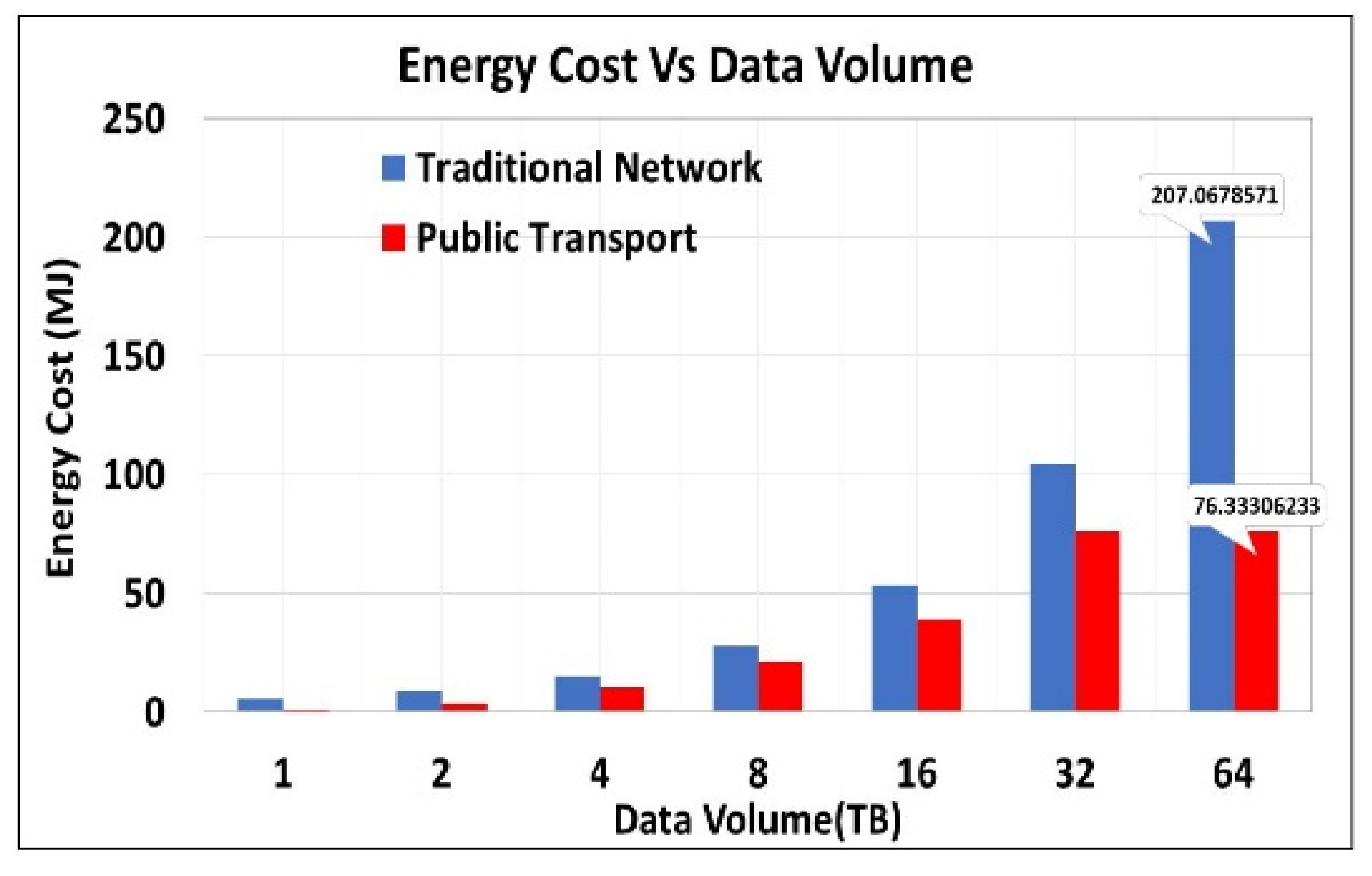
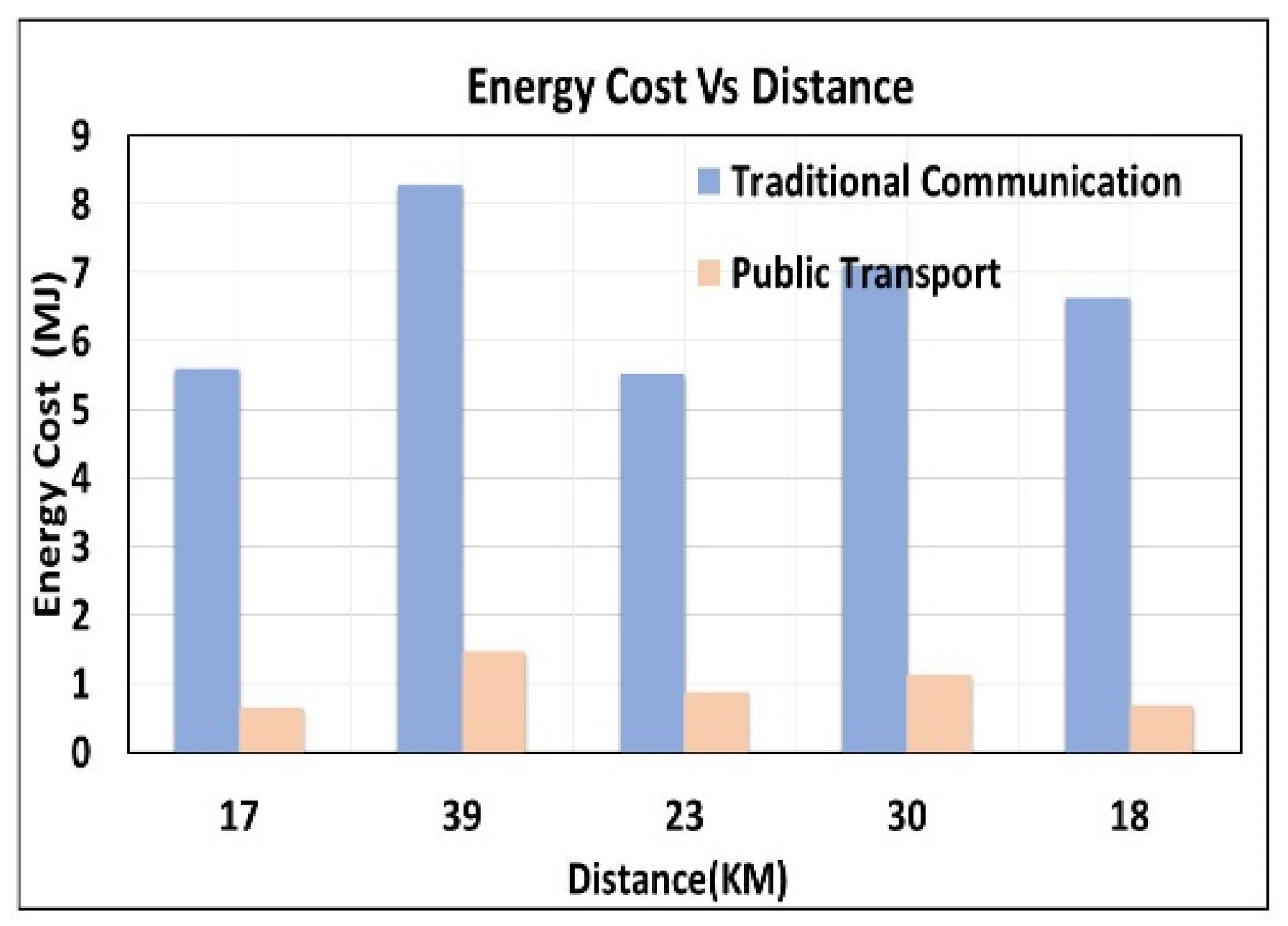
- For evaluation, a detailed comparative analysis of energy consumption is performed for traditional and vehicular networks.
2. Related Work
3. System Model
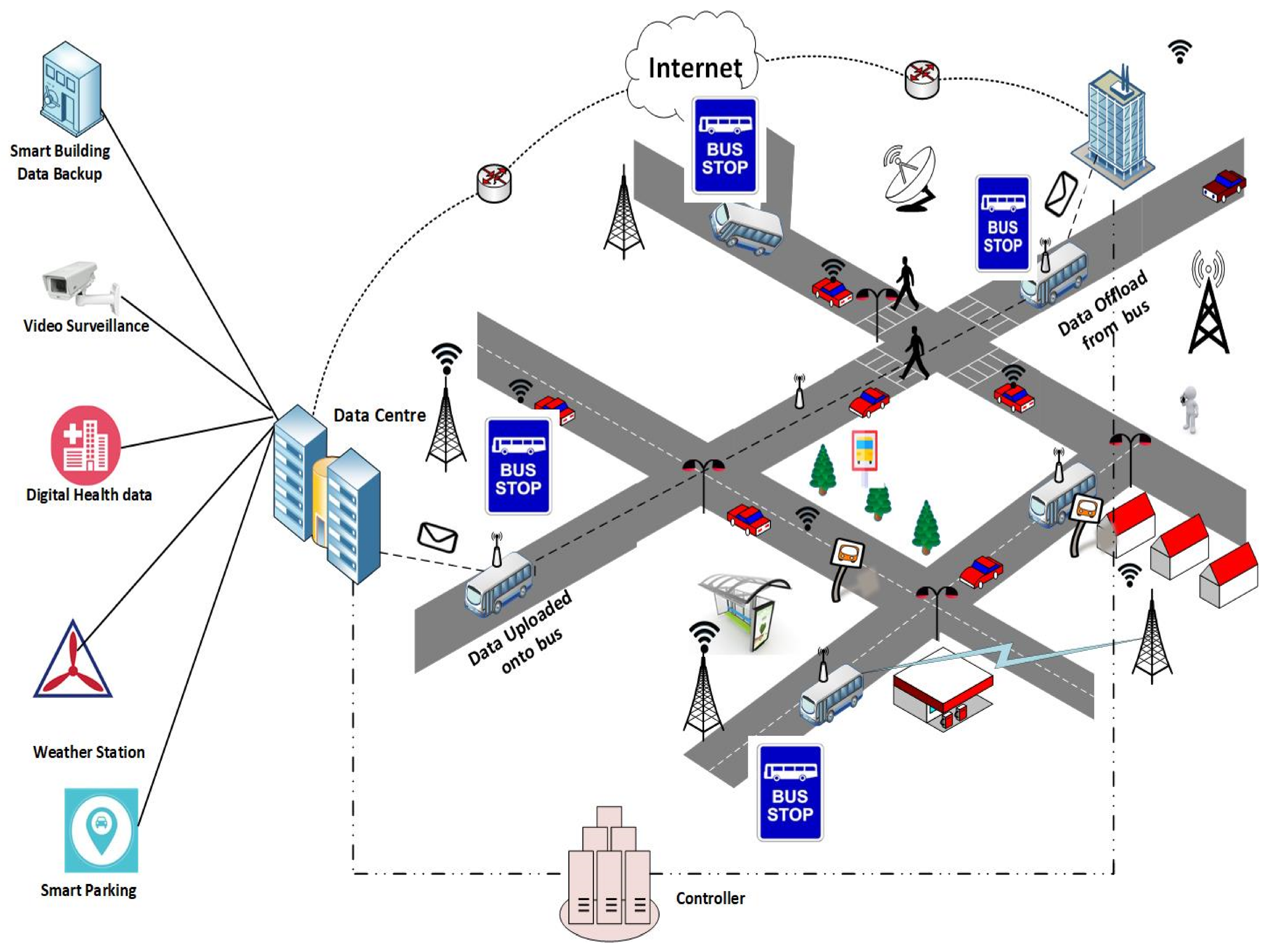
3.1. Neural Network-Based Sustainable Data Dissemination System (NESUDA)
3.2. Bus Arrival Time Prediction Model
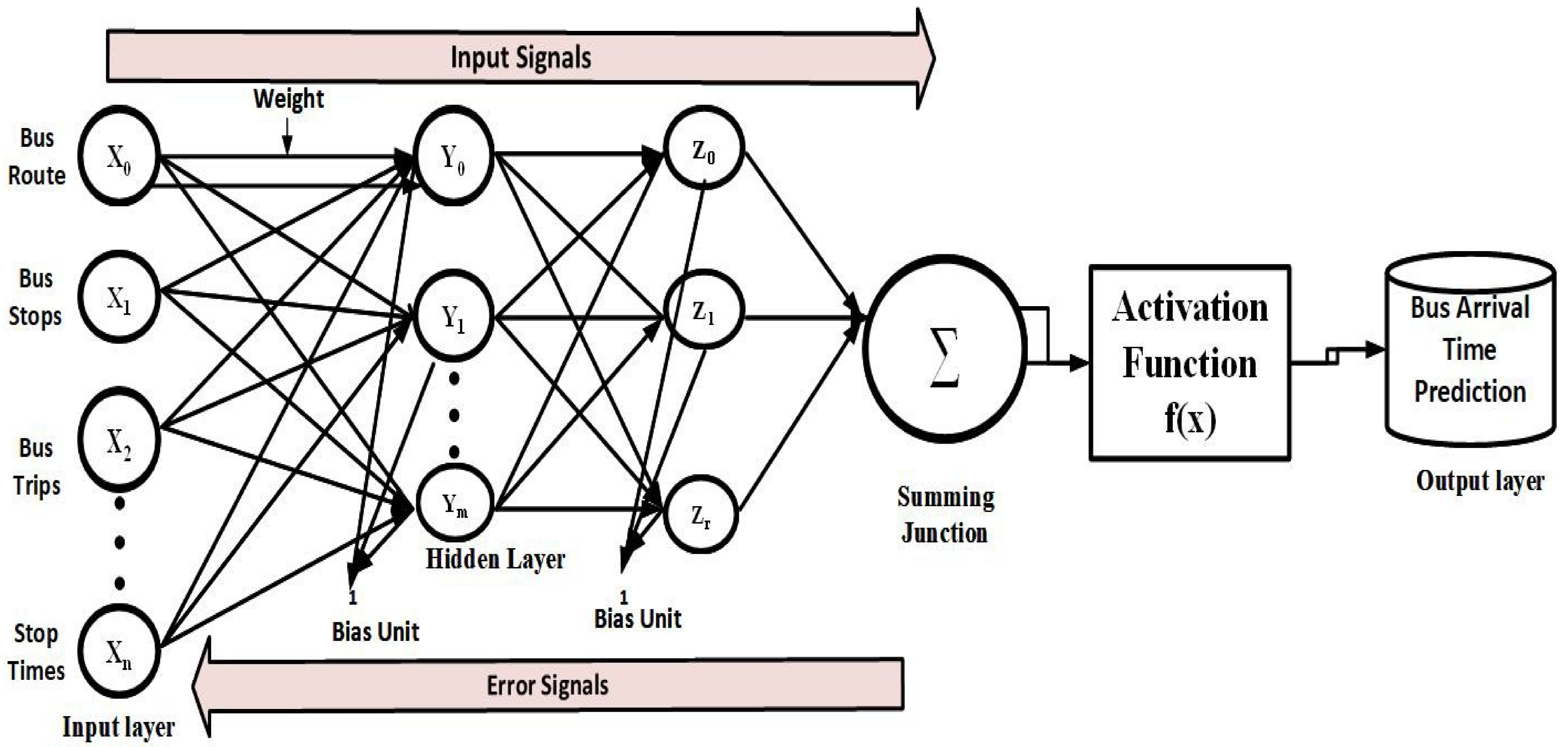
- Input layer: This layer provides input to the neural network such as bus route, trips, and its corresponding metadata. The bus route consists of its name, id, and agency name. The bus trip is characterized by shape coordinates, trip id, route id, and direction. The first and last bus stop of each route is the source and destination stop, respectively. The input layer interacts with the data provided, accepts data in the form of signals or features. These features are then normalized to achieve better numerical precision when a mathematical model is applied at the hidden layer [42]. At this stage, small random values are initialized to the weights. The input layer just passes on the information to the hidden layer after adding weights without any computation. It is represented below. (Table 1)Xi = θ(X1, X2, ..., Xn)
- Hidden layer: This layer accepts all the information from the input layer and feed-forward to all hidden layers to process it and forward it to the output layer. Next, this layer extracts all the features from the input layer and performs processing or training of the network with an activation function. The main motive of the activation function is to add nonlinearity into the network. There are many activation functions such as sigmoid, logistic, and hyperbolic tangent functions (tanh), ReLU, are the most common choices. In our model, the ReLU function is used as a rectifier unit for all input values and direct to (0, θ). This function is given byHere, the function outputs zero if the input values in the nonlinear function are negative or else equal to the value gives as input.
- Output layer: The output layer consists of results generated from previous layers. It updates errors as well as the weights associated with the connections (edges). The number of neurons in this layer corresponds to the output values of the problem. The neuron with n inputs calculates its output, as shown in Equation (3). As discussed above, all the input features are feed-forward, and then some bias weight is applied to the hidden layer, and finally, the output layer process the desired variables to be predicted.where Xi is the ith inputWi is the value of ith weightb is the bias, and f is an activation function.
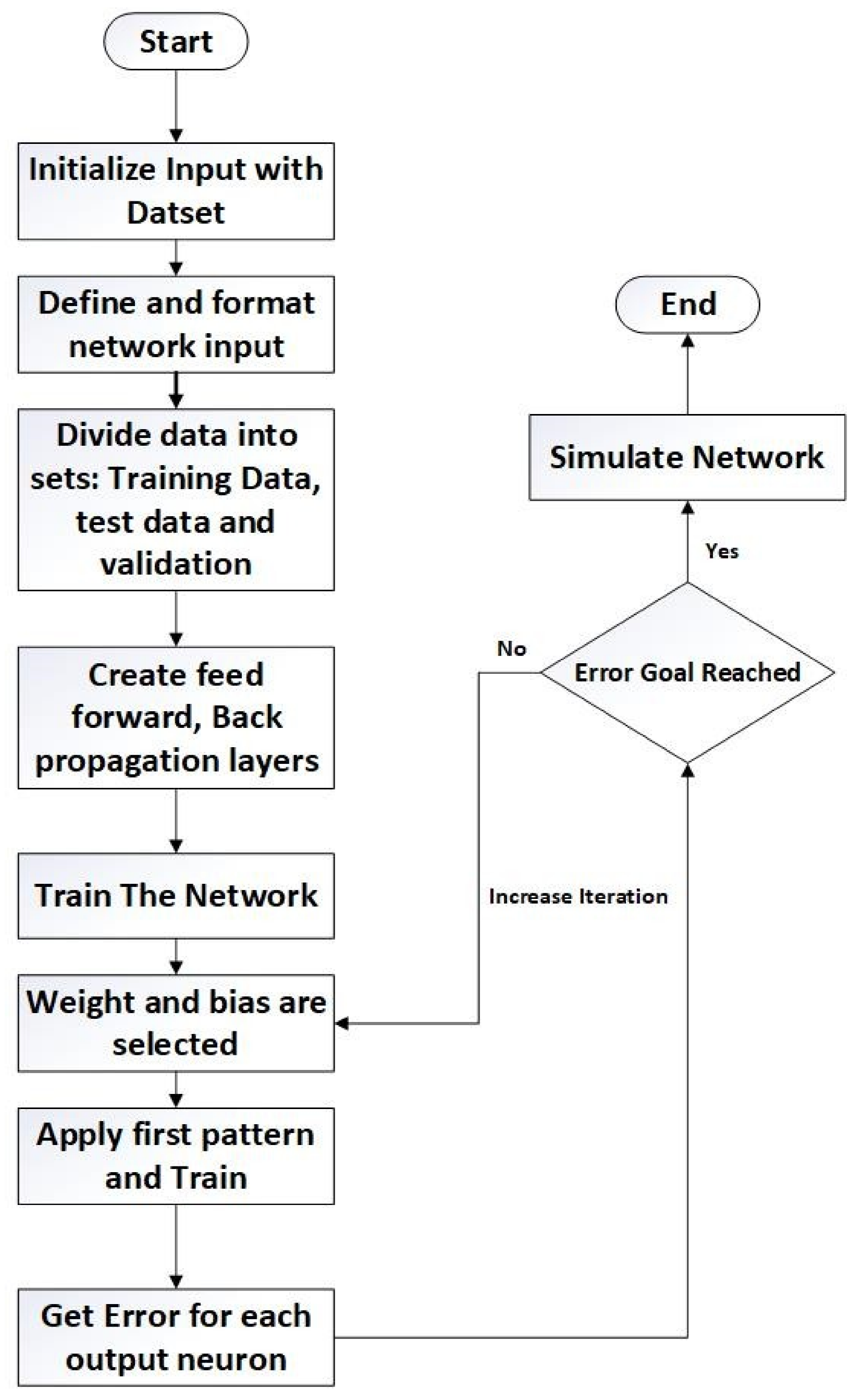
- Training, testing, and validation: Although the basic procedure of training any neural network is the same, however, the accuracy of the outcome relies on the features of input or output combinations. Therefore, it is highly important to validate a network to verify that training accuracy is sufficient or more iterations are required. During our ANN training algorithm as shown in Figure 3, we separate data input into two categories: one part is used to define the model, and the other part is used to validate the model. We use transport network input features as per time, date, stops, stop time. Next, we sort this input data to feed-forward to the input layer, the first 70% of data can be considered as training data to construct the model, and the next 30% is used for testing and validation.
- Mean absolute percentage error (MAPE) = MAPE is defined as the average percentage difference between the observed value and the predicted value of bus arrival time. Where yi = Predicted value, y0 = observed value.
- Symmetric mean absolute error (SMAPE) = It is an accuracy measure based on percentage (or relative) errors between the observed value and the predicted value.
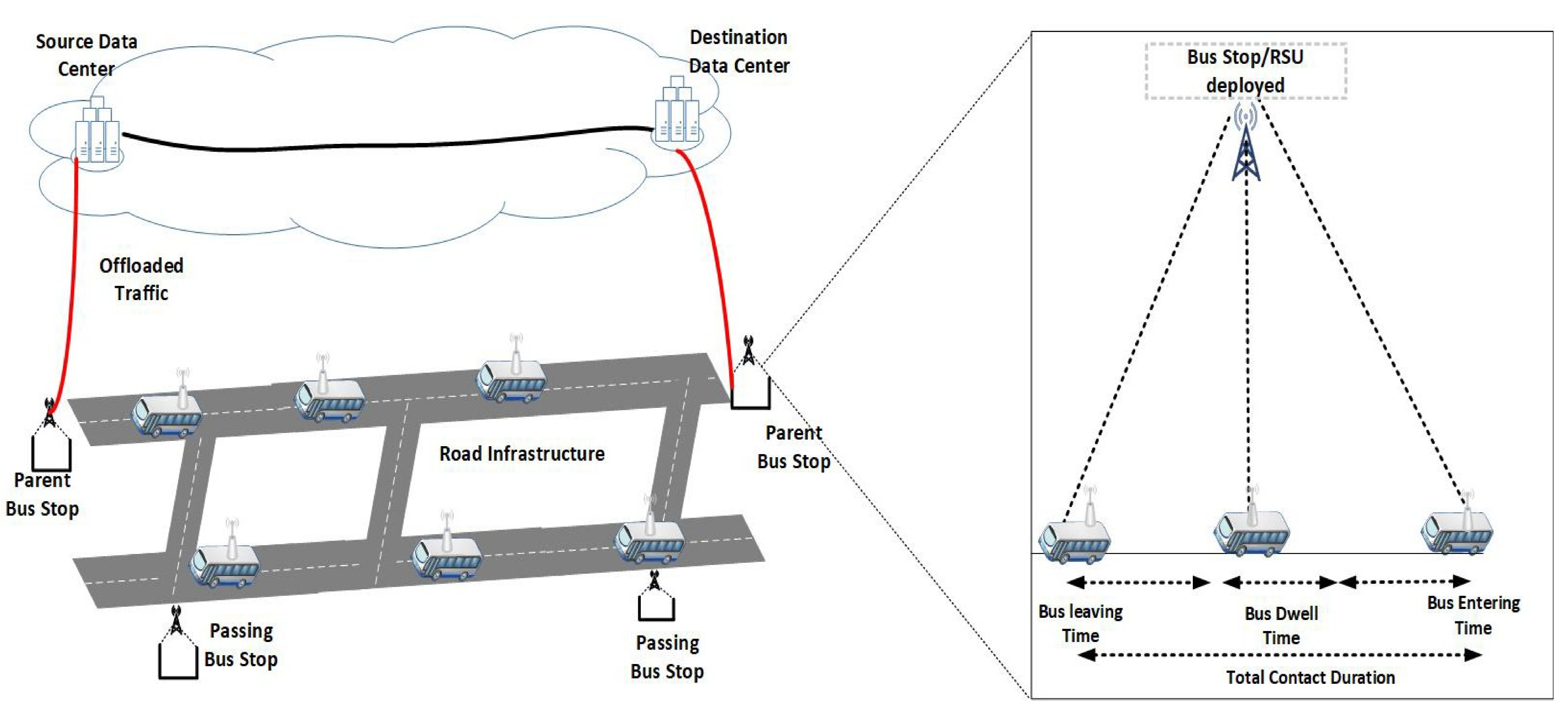
3.3. Data Offloading Model onto Buses
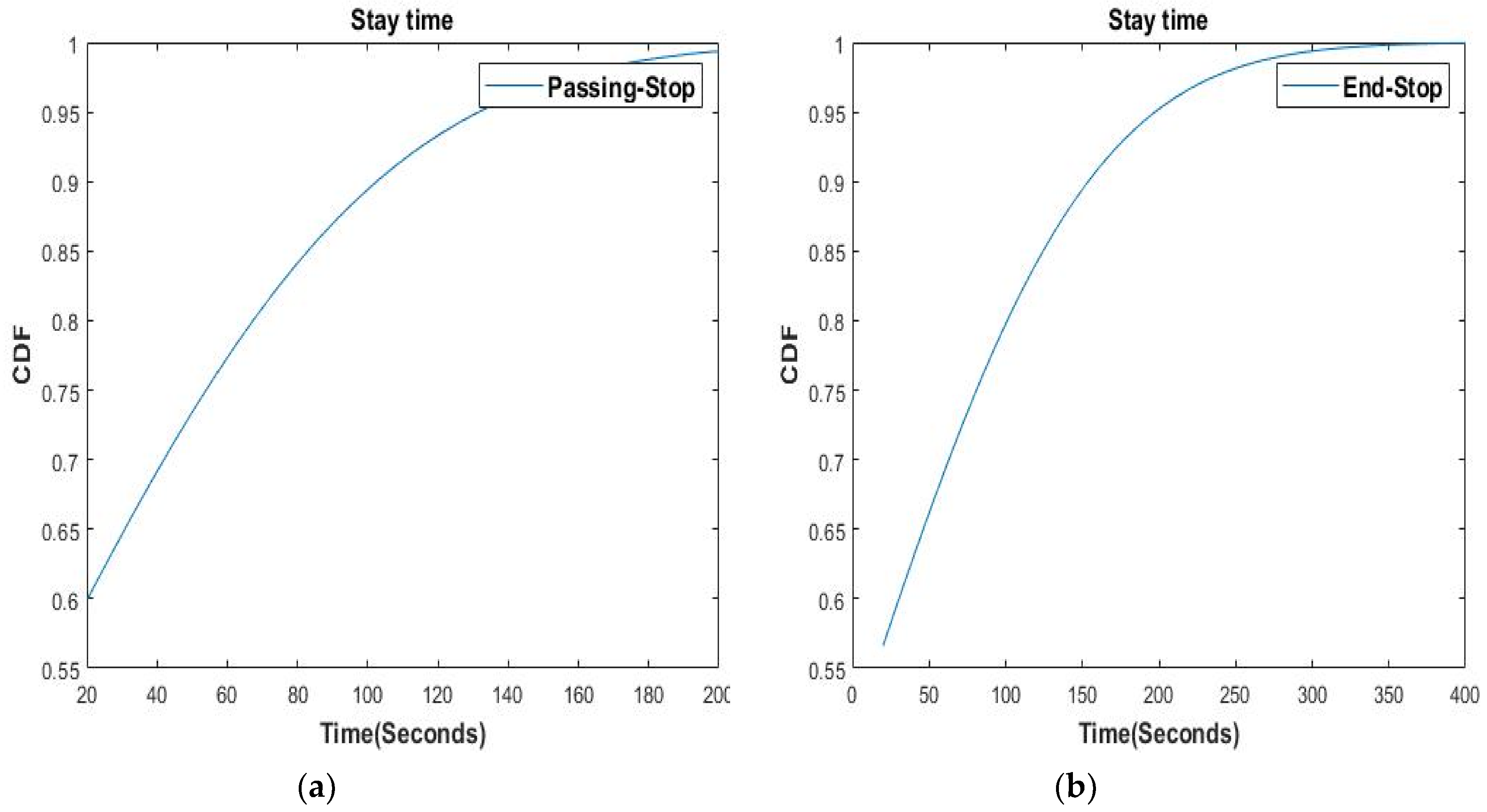
- Data offloading for stopping stops: Recall that the objective is to use public transport vehicles to carry large amounts of delay-tolerant data while reducing traffic load from existing infrastructure. All buses pass by bus stops, and data can be offloaded as per the dwell time, enter time, exit time, and contact duration of the bus into the range of the deployed RSU.
3.4. Data offloading for Passing Stops
3.5. Total Data Offloading for NESUDA
4. Evaluation Results
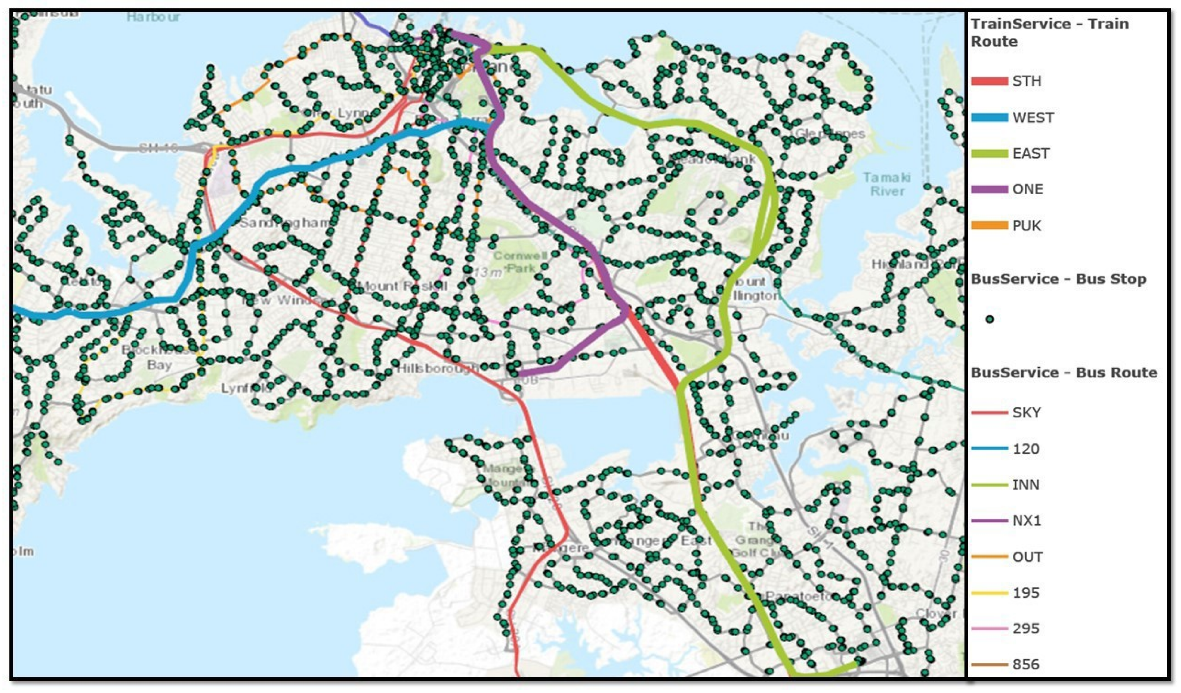
4.1. Case Study: Auckland Public Transport Network
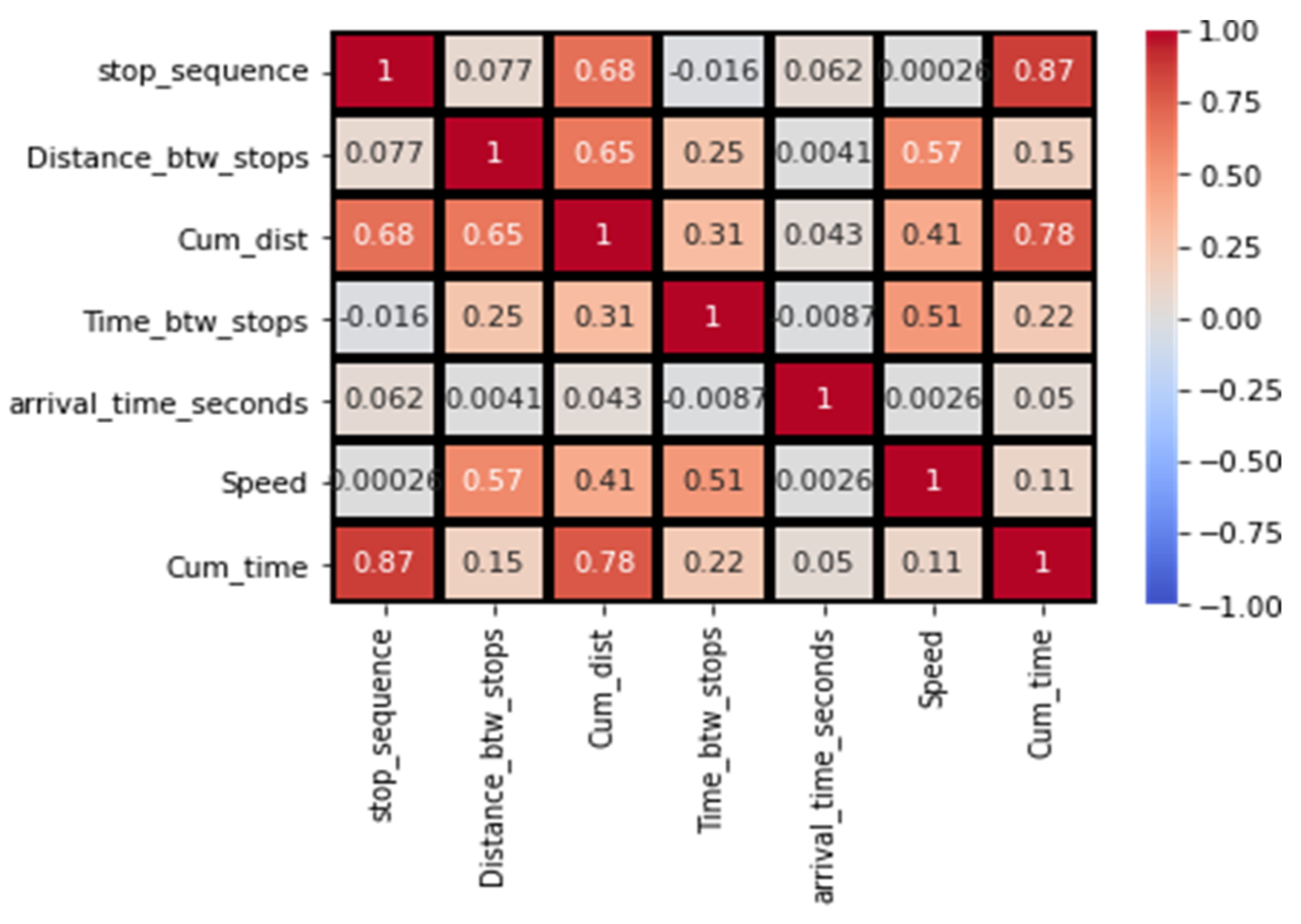
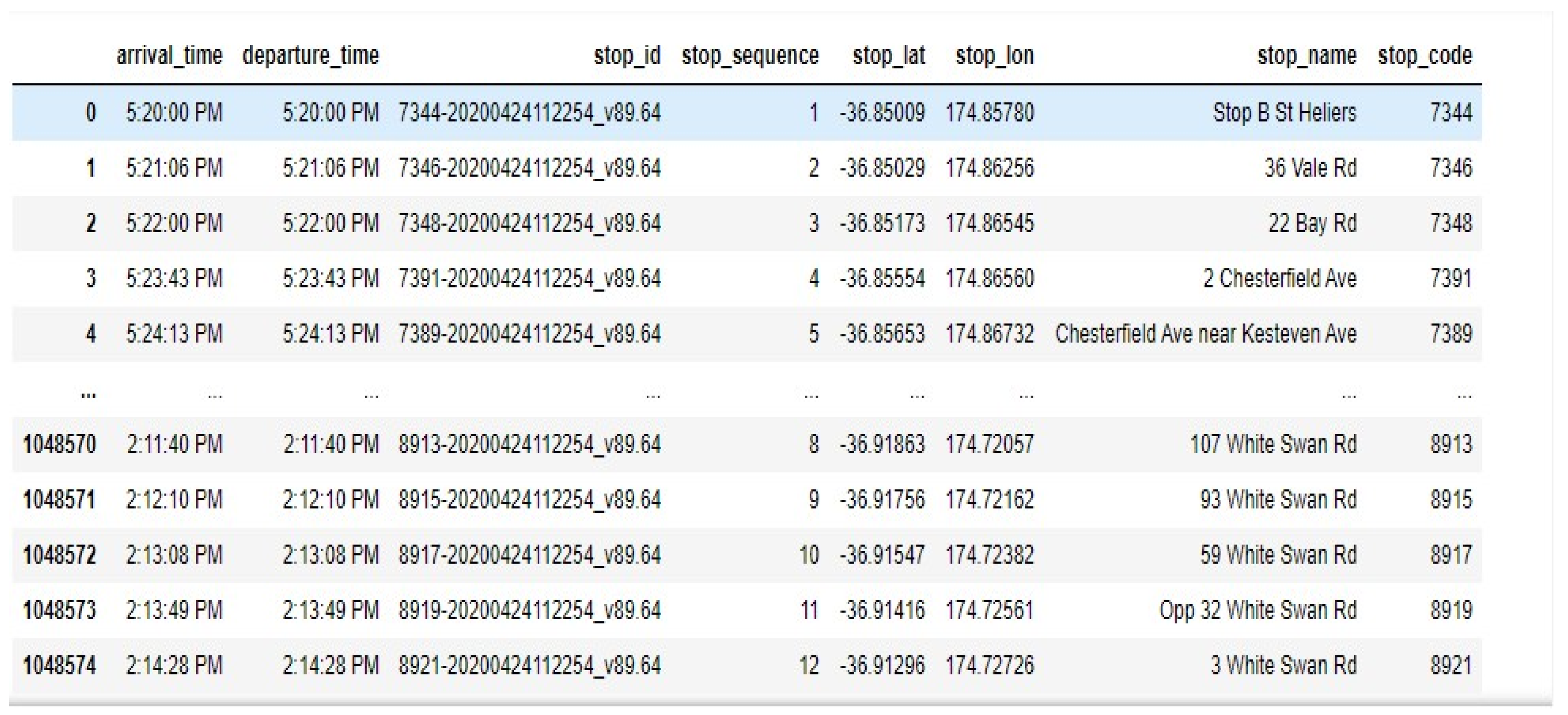
4.1.1. Data Preprocessing of Collected Dataset
- Calculating the distance between two bus stops
- 2.
- Calculating bus travel time between two bus service stops
- 3.
- Calculating speed between two bus service stops
- 4.
- Testing and validation
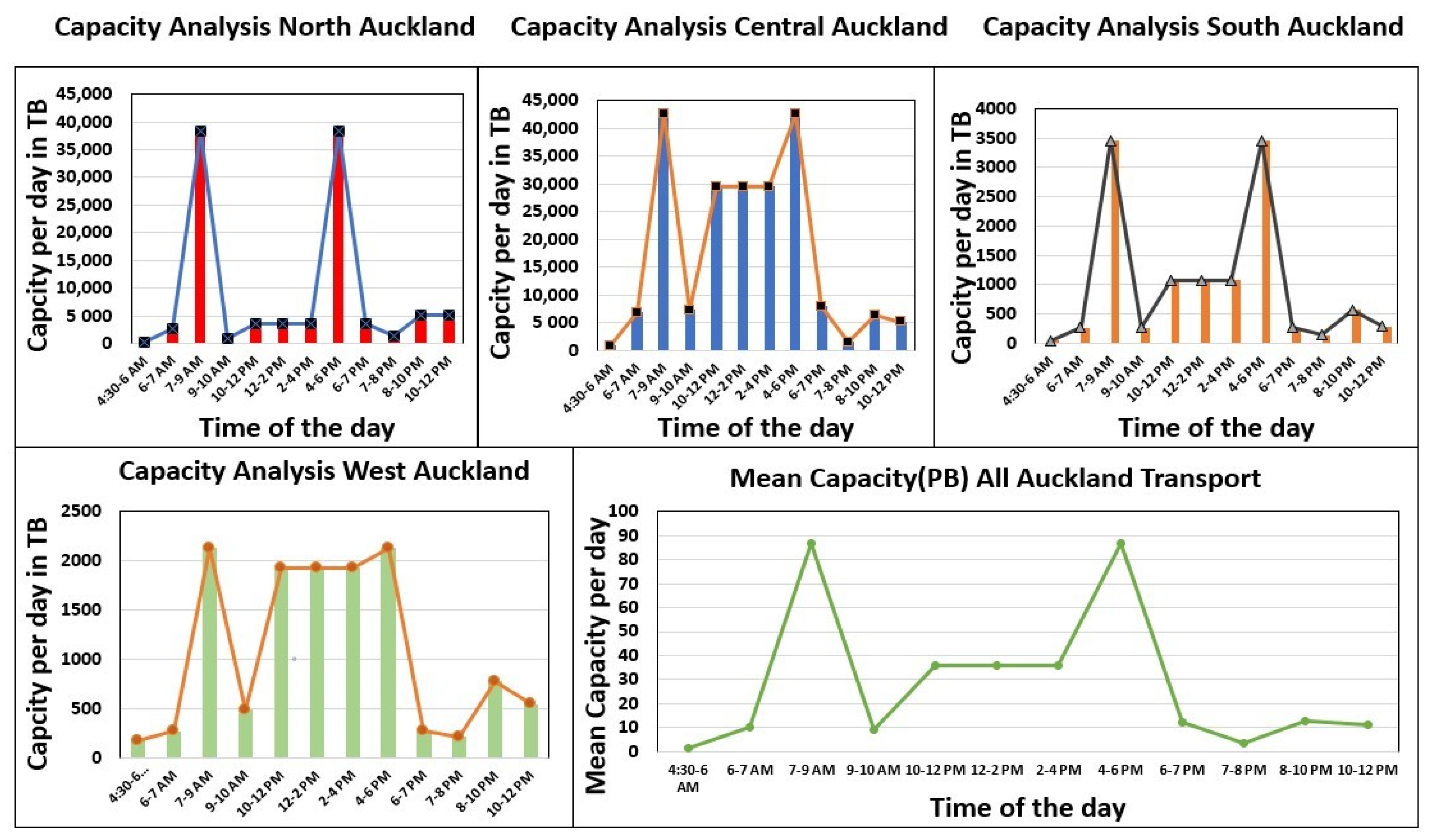
4.1.2. Auckland Transport Capacity Analysis
4.2. Auckland Transport Test Trips
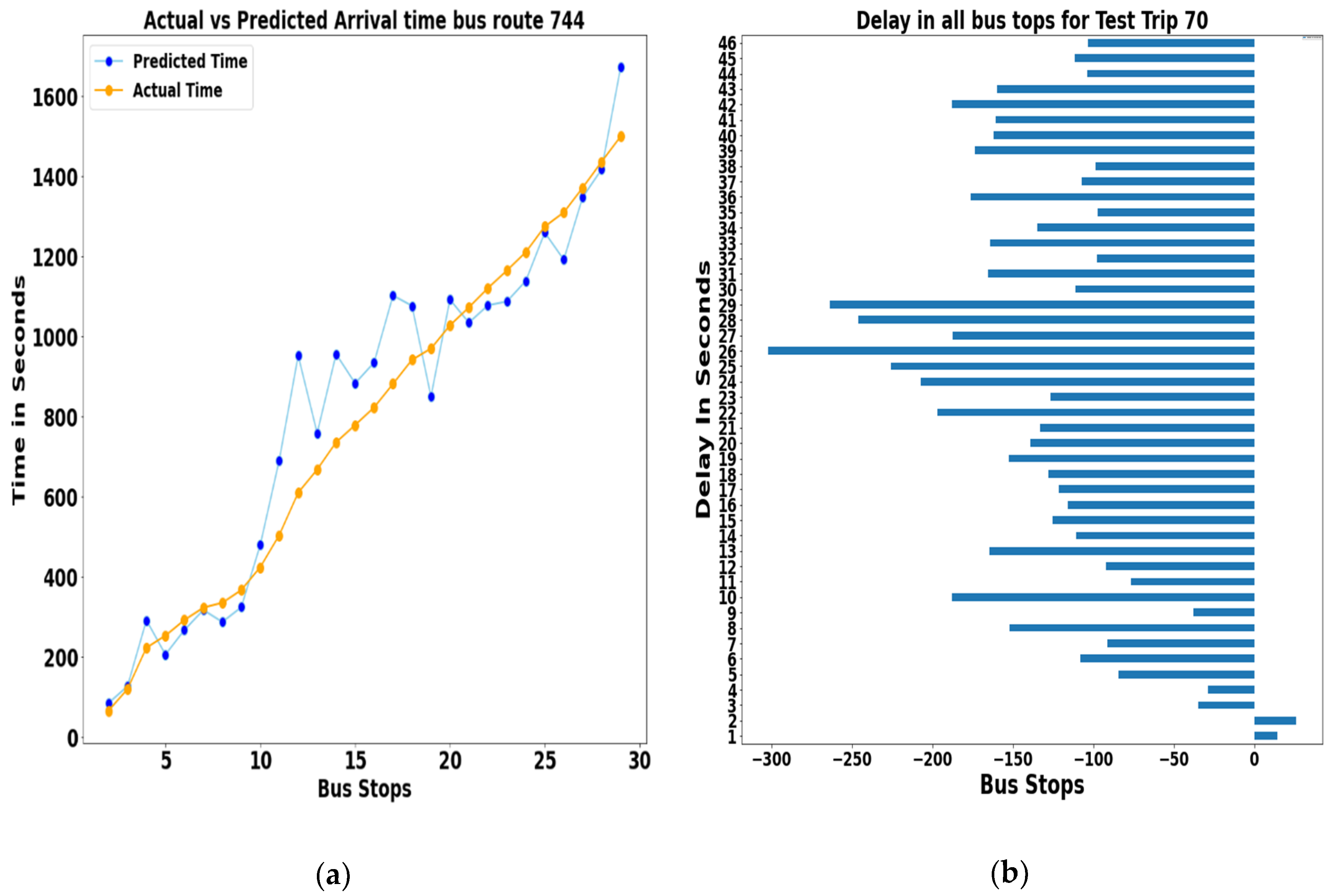
- Test Trip 744: The testbed selected as a sample is the Auckland Transport bus route 744. Which is one of Auckland’s central services and connects St Heliers To Panmure via Glen Innes, considering downstream direction covering 29 stops with trip duration for 25 min and length of route of 7 km in between Stop 1 and Stop 29. Figure 12a illustrates the behaviors of actual and predicted bus arrival times at each bus stop after validation of the neural network algorithm. On the x-axis, the bus stop numbers are plotted, starting from the target station of each testing sample up to the last destination of the bus trip. On the y-axis, the arrival time (seconds) taken at which a bus reaches any bus stops on its route is plotted. The trained algorithm trend proves that there is a slight difference at a few bus stops between actual and predicted arrival times. Figure 12b represents the delay (seconds) to reach each bus stop. The negative value represents that the bus is arriving late at each bus stop. On the other site, positive values indicate the early arrival of buses at each stop, which ultimately represents the variation in bus arrival time. We are considering buses to carry data with delay-tolerant features. Therefore, this much delay variation is acceptable to use buses as another communication mode.
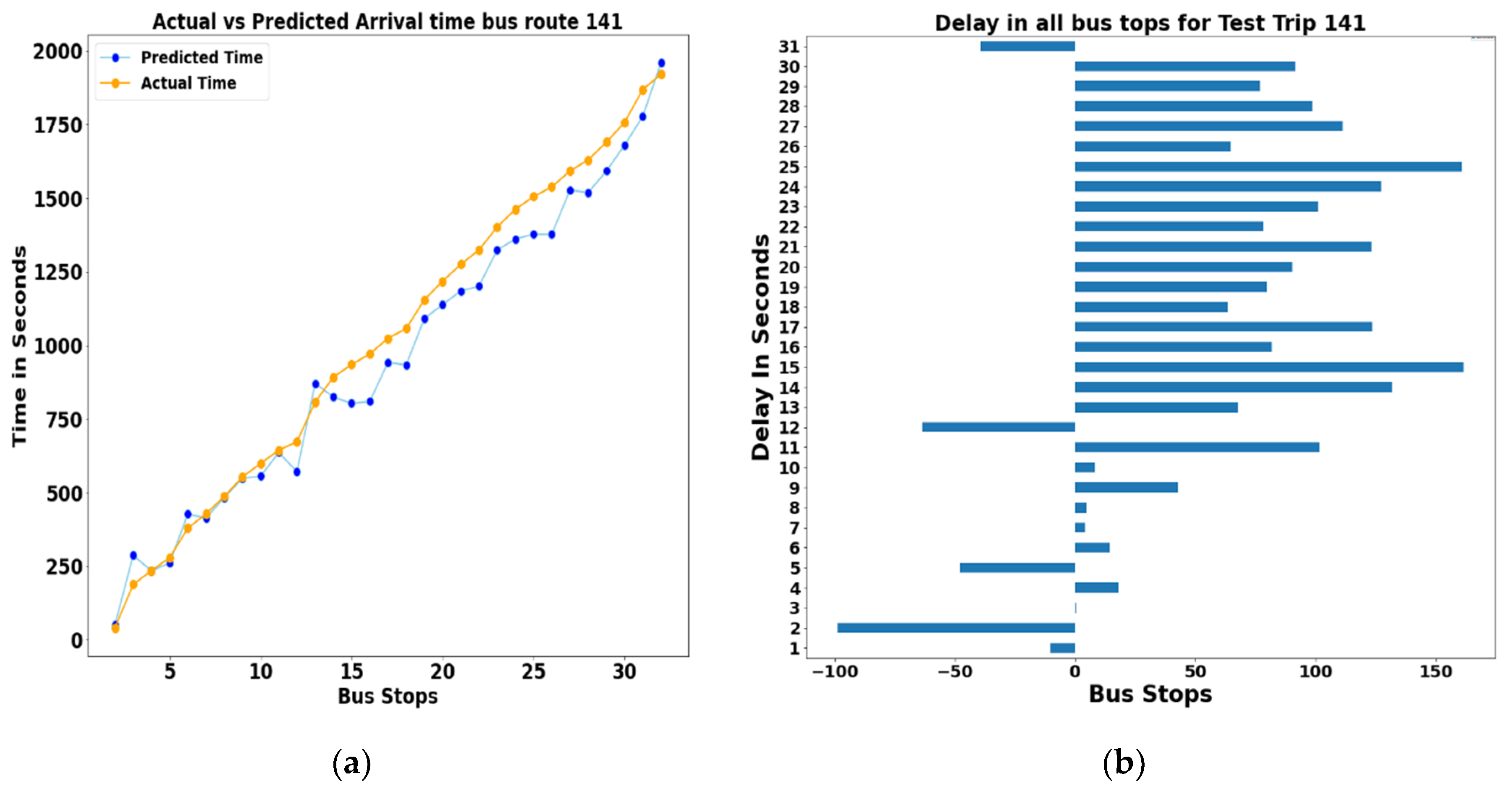
- Test Trip 141: The next test trip selected is number 141, which is called Henderson West Loop Anticlockwise. This trip has 32 stops and covers the whole journey in approximately 33 min. The bus departs from Stop A Henderson Interchange and finishes at Stop B Henderson Interchange. The operating hours for this bus are from 05:15 to 23:15 every day, including weekend hours from 06:38 to 23:08. Same way as the previous trip, Figure 13a illustrates that there is variation between predicted and actual arrival time. However, Figure 13b clearly shows that the bus is arriving early most of the time at each stop except 5 or 6 bus stops, which clearly states that we can use public transport as another communication mode with delay-tolerant features.
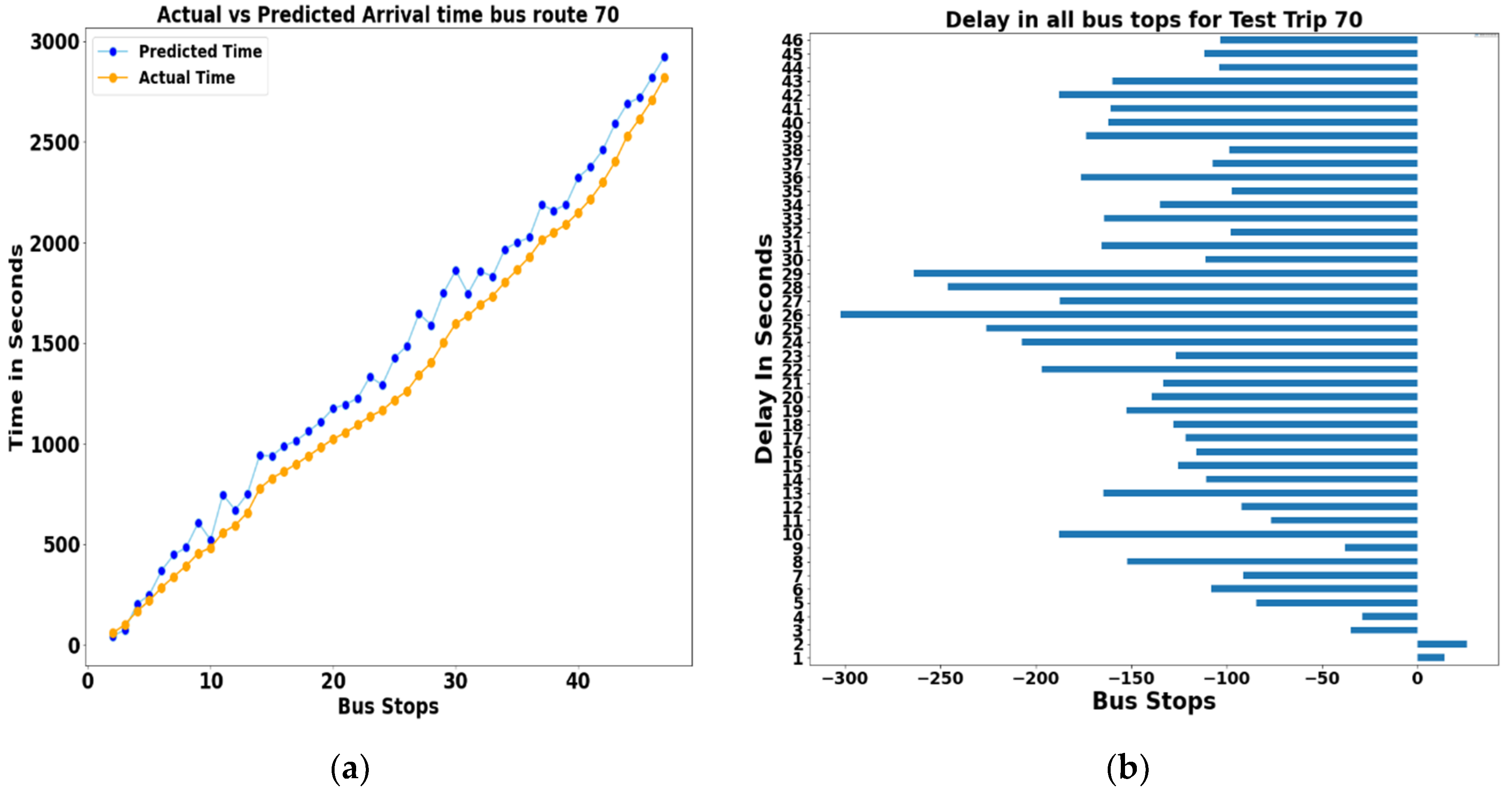
- Test Trip 70: This test trip 70 starts from 56 Customs St east near Britomart and ends in Stop A Botany town center. This trip covers a total of 46 stops in approximately 58 min. This bus route is operational every day, and the first journey starts at 00:05 and ends at 23:50 every weekday, and on the weekend, it begins at 06:15 am and ends at 23:35. Similarly, Figure 14a illustrates the trend of actual and predicted bus arrival time at each bus stop. This route shows that actual and predicted arrival time is different on each bus stop and never on the scheduled time. In Figure 14b, delay(seconds) represents all the negative values and implies that the bus is late at each bus stop.
| Algorithm 1: Data Allocation onto Buses | |
| Input: s: Source location, d: Destination location, t: Stay Time, b: Available bus | |
| Output: Status Message | |
| 1. while true do | |
| 2. m←wait(s); | // wait for message from nodes |
| 3. move (φs, λs); | // Reach near source location or bus-stop |
| 4. Available (b, t) | // Check for available bus and stay time |
| 5. Upload (s, b) | // Upload data onto bus |
| 6. move (φd, λd); | // Reach near destination location or bus-stop |
| 7. download (b, d) | |
| 8. If !valid() then | |
| 9. Notify (d) | |
| 10. end if | |
| 11. end while | |
5. Conclusions and Future Work
Author Contributions
Funding
Conflicts of Interest
References
- Cisco Systems. Cisco Visual Networking Index: Global Mobile Data Traffic Forecast Update, 2017–2022; Cisco: San Jose, CA, USA, 2019. [Google Scholar]
- Liu, J.; Wan, J.; Zeng, B.; Wang, Q.; Song, H.; Qiu, M. A scalable and quick-response software defined vehicular network assisted by mobile edge computing. IEEE Commun. Mag. 2017, 55, 94–100. [Google Scholar] [CrossRef]
- Smith, G.J.; Bennett Moses, L.; Chan, J. The challenges of doing criminology in the big data era: Towards a digital and data-driven approach. Br. J. Criminol. 2017, 57, 259–274. [Google Scholar] [CrossRef]
- You, C.; Huang, K.; Chae, H.; Kim, B.H. Energy-efficient resource allocation for mobile-edge computation offloading. IEEE Trans. Wirel. Commun. 2016, 16, 1397–1411. [Google Scholar] [CrossRef]
- Ekbatanifard, G.; Rajabi, M. An energy efficient data dissemination scheme for distributed storage in the internet of things. Comput. Knowl. Eng. 2017, 1, 1–8. [Google Scholar]
- Chahal, M.; Harit, S. Network selection and data dissemination in heterogeneous software-defined vehicular network. Comput. Netw. 2019, 161, 32–44. [Google Scholar] [CrossRef]
- Li, S.; Zhai, D.; Du, P.; Han, T. Energy-efficient task offloading, load balancing, and resource allocation in mobile edge computing enabled IoT networks. Sci. China Inf. Sci. 2019, 62, 29307. [Google Scholar] [CrossRef]
- Pham, X.Q.; Nguyen, T.D.; Nguyen, V.; Huh, E.N. Joint node selection and resource allocation for task offloading in scalable vehicle-assisted multi-access edge computing. Symmetry 2019, 11, 58. [Google Scholar] [CrossRef]
- Li, M.; Si, P.; Zhang, Y. Delay-tolerant data traffic to software-defined vehicular networks with mobile edge computing in smart city. IEEE Trans. Veh. Technol. 2018, 67, 9073–9086. [Google Scholar] [CrossRef]
- Hu, L.; Liu, A.; Xie, M.; Wang, T. UAVs joint vehicles as data mules for fast codes dissemination for edge networking in smart city. Peer-Peer Netw. Appl. 2019, 12, 1550–1574. [Google Scholar] [CrossRef]
- Singh, P.; Kaur, A.; Kumar, N. A reliable and cost-efficient code dissemination scheme for smart sensing devices with mobile vehicles in smart cities. Sustain. Cities Soc. 2020, 62, 102374. [Google Scholar] [CrossRef]
- Poulliat, C. Mobile Data Offloading via Urban Public Transportation Networks. Ph.D. Thesis, Institut de Recherche en Informatique de Toulouse, INPT, Toulouse, France, 2017. [Google Scholar]
- Han, Q.; Liu, K.; Zeng, L.; He, G.; Ye, L.; Li, F. A Bus Arrival Time Prediction Method Based on Position Calibration and LSTM. IEEE Access 2020, 8, 42372–42383. [Google Scholar] [CrossRef]
- Wang, T.; Li, P.; Wang, X.; Wang, Y.; Guo, T.; Cao, Y. A comprehensive survey on mobile data offloading in heterogeneous network. Wirel. Netw. 2019, 25, 573–584. [Google Scholar] [CrossRef]
- Lee, K.; Lee, J.; Yi, Y.; Rhee, I.; Chong, S. Mobile data offloading: How much can WiFi deliver? IEEE/ACM Trans. Netw. 2012, 21, 536–550. [Google Scholar] [CrossRef]
- Mehmeti, F.; Spyropoulos, T. Performance analysis of mobile data offloading in heterogeneous networks. IEEE Trans. Mob. Comput. 2016, 16, 482–497. [Google Scholar] [CrossRef]
- Barone, R.E.; Giuffrè, T.; Siniscalchi, S.M.; Morgano, M.A.; Tesoriere, G. Architecture for parking management in smart cities. IET Intell. Transp. Syst. 2013, 8, 445–452. [Google Scholar] [CrossRef]
- Liu, H.; Xu, H.; Yan, Y.; Cai, Z.; Sun, T.; Li, W. Bus Arrival Time Prediction Based on LSTM and Spatial-Temporal Feature Vector. IEEE Access 2020, 8, 11917–11929. [Google Scholar] [CrossRef]
- Wang, Z.; Zhong, Z.; Zhao, D.; Ni, M. Bus-based cloudlet cooperation strategy in vehicular networks. In Proceedings of the 2017 IEEE 86th Vehicular Technology Conference (VTC-Fall), Toronto, ON, Canada, 24–27 September 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–6. [Google Scholar]
- Ahmad, A. Utilizing Public Transport Networks for Bulk Data Transfer; University in Helsinki: Helsinki, Finland, 2019. [Google Scholar]
- Baron, B.; Spathis, P.; Rivano, H.; de Amorim, M.D. Offloading massive data onto passenger vehicles: Topology simplification and traffic assignment. IEEE/ACM Trans. Netw. 2016, 24, 3248–3261. [Google Scholar] [CrossRef]
- Malik, A.W.; Mahmood, I.; Ahmed, N.; Anwar, Z. Big data in motion: A vehicle-assisted urban computing framework for smart cities. IEEE Access 2019, 7, 55951–55965. [Google Scholar]
- Kanwal, M.; Malik, A.W.; Rahman, A.U.; Mahmood, I.; Shahzad, M. Sustainable vehicle-assisted edge computing for big data migration in smart cities. IEEE Internet Things J. 2019, 7, 1857–1871. [Google Scholar] [CrossRef]
- Komnios, I.; Kalogeiton, E. A DTN-based architecture for public transport networks. Ann. Telecommun. 2015, 70, 523–542. [Google Scholar] [CrossRef]
- Bendouda, D.; Rachedi, A.; Haffaf, H. Programmable architecture based on software defined network for internet of things: Connected dominated sets approach. Future Gener. Comput. Syst. 2018, 80, 188–197. [Google Scholar] [CrossRef]
- Teng, H.; Liu, Y.; Liu, A.; Xiong, N.N.; Cai, Z.; Wang, T.; Liu, X. A novel code data dissemination scheme for Internet of Things through mobile vehicle of smart cities. Future Gener. Comput. Syst. 2019, 94, 351–367. [Google Scholar] [CrossRef]
- Dias, D.S.; Costa, L.H.M.; de Amorim, M.D. Data offloading capacity in a megalopolis using taxis and buses as data carriers. Veh. Commun. 2018, 14, 80–96. [Google Scholar] [CrossRef]
- Hui, Y.; Su, Z.; Luan, T.H. Collaborative content delivery in software-defined heterogeneous vehicular networks. IEEE/ACM Trans. Netw. 2020, 28, 575–587. [Google Scholar] [CrossRef]
- Naseer, S.; Liu, W.; Sarkar, N.I.; Chong, P.H.J.; Lai, E.; Ma, M.; Prasad, R.V.; Danh, T.C.; Chiaraviglio, L.; Qadir, J.; et al. A sustainable marriage of telcos and transp in the era of big data: Are we ready? In International Conference on Smart Grid Inspired Future Technologies; Springer: Berlin/Heidelberg, Germany, 2018; pp. 210–219. [Google Scholar]
- Naseer, S.; Liu, W.; Sarkar, N.I. Energy-Efficient Massive Data Dissemination through Vehicle Mobility in Smart Cities. Sensors 2019, 19, 4735. [Google Scholar] [CrossRef]
- Naseer, S.; Liu, W.; Sarkar, N.I.; Chong, P.H.J.; Lai, E.; Prasad, R.V. A sustainable vehicular based energy efficient data dissemination approach. In Proceedings of the 2017 27th International Telecommunication Networks and Applications Conference (ITNAC), Melbourne, Australia, 22–24 November 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–8. [Google Scholar]
- Munjal, R.; Liu, W.; Li, X.J.; Gutierrez, J.; Furdek, M. Sustainable Crowdsensing Data Dissemination Using Public Vehicles. In Crowd Assisted Networking and Computing; CRC Press: Boca Raton, FL, USA, 2018; pp. 77–110. [Google Scholar]
- Munjal, R.; Liu, W.; Li, X.J.; Gutierrez, J.; Furdek, M. Sustainable massive data dissemination by using software defined connectivity approach. In Proceedings of the 2017 27th International Telecommunication Networks and Applications Conference (ITNAC), Melbourne, Australia, 22–24 November 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–6. [Google Scholar]
- Munjal, R.; Liu, W.; Li, X.J.; Gutierrez, J.; Chong, P.H.J. Telco asks transp: Can you give me a ride in the era of big data? In Proceedings of the 2017 IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), Atlanta, GA, USA, 1–4 May 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 766–771. [Google Scholar]
- Manasseh, C.; Sengupta, R. Predicting driver destination using machine learning techniques. In Proceedings of the 16th International IEEE Conference on Intelligent Transportation Systems (ITSC 2013), The Hague, The Netherlands, 6–9 October 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 142–147. [Google Scholar]
- Patnaik, J.; Chien, S.; Bladikas, A. Estimation of bus arrival times using APC data. J. Public Transp. 2004, 7, 1. [Google Scholar] [CrossRef]
- Zhao, X.; Yang, K.; Chen, Q.; Peng, D.; Jiang, H.; Xu, X.; Shuang, X. Deep learning based mobile data offloading in mobile edge computing systems. Future Gener. Comput. Syst. 2019, 99, 346–355. [Google Scholar] [CrossRef]
- Chen, M.; Liu, X.; Xia, J.; Chien, S.I. A dynamic bus-arrival time prediction model based on APC data. Comput. Aided Civ. Infrastruct. Eng. 2004, 19, 364–376. [Google Scholar] [CrossRef]
- Zhang, Z.; Wang, Y.; Chen, P.; He, Z.; Yu, G. Probe data-driven travel time forecasting for urban expressways by matching similar spatiotemporal traffic patterns. Transp. Res. Part C Emerg. Technol. 2017, 85, 476–493. [Google Scholar] [CrossRef]
- Suk, H.I. An introduction to neural networks and deep learning. In Deep Learning for Medical Image Analysis; Elsevier: Amsterdam, The Netherlands, 2017; pp. 3–24. [Google Scholar]
- Saki, M.; Abolhasan, M.; Lipman, J. A Big Sensor Data Offloading Scheme in Rail Networks. In Proceedings of the 2019 IEEE 89th Vehicular Technology Conference (VTC2019-Spring), Kuala Lumpur, Malaysia, 28 April–1 May 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–6. [Google Scholar]
- Amita, J.; Jain, S.; Garg, P. Prediction of bus travel time using ANN: A case study in Delhi. Transp. Res. Procedia 2016, 17, 263–272. [Google Scholar] [CrossRef]
- Chamberlain, R. Great Circle Distance between Two Points. Available online: http://www.movable-type.co.uk/scripts/gis-faq-5.1.html (accessed on 20 October 2020).
- Yu, L.; Wang, S.; Lai, K. An Integrated Data Preparation Scheme for Neural Network Data Analysis. IEEE Trans. Knowl. Data Eng. 2006, 18, 1. [Google Scholar]
- Munjal, R.; Liu, W.; Li, X.J.; Gutierrez, J. Big Data Offloading using Smart Public Vehicles with Software Defined Connectivity. In Proceedings of the 2019 IEEE Intelligent Transportation Systems Conference (ITSC), Auckland, New Zealand, 27–30 October 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 3361–3366. [Google Scholar]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Meaning |
| Xi | Input variables |
| Wi | Weight |
| f (θ) | ReLU function |
| s | Speed of the bus |
| tcd | Contact duration |
| ten | Entering time |
| tdw | Dwell time |
| tex | Exit time |
| d | Distance between RSU and bus |
| rsp(t) | Received signal strength |
| dre f | Reference distance |
| Pr | Received power |
| σ | Normal distribution random variable |
| dex | Distance after t seconds of bus leaving |
| nb | Background noise |
| ρ | Mac efficiency |
| µ | Throughput |
| λmax | Max data rate |
| Test Trip | Number of Bus Stops |
|---|---|
| Test trip 744 | 29 |
| Test trip 141 | 32 |
| Test trip 70 | 46 |
| MAPE | Interpretation |
|---|---|
| <10 | Highly accurate forecasting |
| 10–20 | Good forecasting |
| 20–50 | Reasonable forecasting |
| >50 | Inaccurate forecasting |
| Test Trip | MAPE | SMAPE |
|---|---|---|
| Test Trip 744 | 14.98 | 0.1447 |
| Test Trip 141 | 13.34 | 0.1551 |
| Test Trip 70 | 19.83 | 0.0687 |
| From | To | LAN | Edge Routers | Core Routers | bup | bdown | Distance (km) |
|---|---|---|---|---|---|---|---|
| Auckland CBD | Henderson | 6 | 2 | 5 | 0.1 | 0.1 | 17 |
| Manukau | Albany | 13 | 2 | 15 | 0.1 | 1.0 | 39 |
| Auckland CBD | Danemora | 6 | 2 | 3 | 0.1 | 10.0 | 23 |
| Manukau | Auckland CBD | 11 | 2 | 3 | 1.0 | 1.0 | 30 |
| Auckland CBD | Albany | 8 | 2 | 14 | 1.0 | 1.0 | 18 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Munjal, R.; Liu, W.; Li, X.J.; Gutierrez, J. A Neural Network-Based Sustainable Data Dissemination through Public Transportation for Smart Cities. Sustainability 2020, 12, 10327. https://doi.org/10.3390/su122410327
Munjal R, Liu W, Li XJ, Gutierrez J. A Neural Network-Based Sustainable Data Dissemination through Public Transportation for Smart Cities. Sustainability. 2020; 12(24):10327. https://doi.org/10.3390/su122410327
Chicago/Turabian StyleMunjal, Rashmi, William Liu, Xue Jun Li, and Jairo Gutierrez. 2020. "A Neural Network-Based Sustainable Data Dissemination through Public Transportation for Smart Cities" Sustainability 12, no. 24: 10327. https://doi.org/10.3390/su122410327
APA StyleMunjal, R., Liu, W., Li, X. J., & Gutierrez, J. (2020). A Neural Network-Based Sustainable Data Dissemination through Public Transportation for Smart Cities. Sustainability, 12(24), 10327. https://doi.org/10.3390/su122410327