Abstract
Autonomous car travel planning is increasingly gaining attention from scientists and professionals, who are addressing the integration of autonomous cars into the general urban transportation system. Autonomous car travel planning depends on the transport system infrastructure, the dynamic data, and their quality. The efficient development of travel depends on the development level of the Intelligent Transport Systems (ITS) and the Cooperative Intelligent Transport Systems (C-ITS). Today, most cities around the world are competing with each other to become the smartest cities possible, using and integrating the most advanced ITS and C-ITS that are available. It is clear that ITS and C-ITS are occupying an increasing share of urban transport infrastructure, so the complex challenges of ITS and C-ITS development will inevitably need to be addressed, in the near future, by integrating them into the overall urban transport system. With this in mind, the authors proposed three autonomous car travel development concepts that should become a conceptual tool in the development of ITS and C-ITS.
1. Introduction
Every day, efforts are made to improve our environment and make it synonymous with a comfortable life; new products and technologies are being developed that are rapidly changing people’s environments and movement habits. Famous car companies are competing with each other in an effort to bring widespread autonomous cars to the market by 2025. Publicly available information is not very detailed, despite many autonomous car surveys being already underway, but they usually cover one specific area only.
Car security systems have evolved very rapidly over the past few decades. All new engineering solutions have been developed to help the driver. These technologies help to prevent or reduce the consequences of accidents, but they do not guarantee complete safety. However, according to the United States Department of Transportation, 94 ± 2.2% of accidents are due to human error [1]. Researchers Bertoncello and Wee claim that autonomous car technology, used en masse, can reduce the number of accidents by as much as 90% [2], also supported by researchers in other countries that completed various studies, examining the key parameters that affect autonomous car safety: human-car interaction, cyber security, testing, societal adaptation, and others [3,4].
Autonomous cars entering the market will further increase the production volume of car manufacturers, which will be challenged by total person kilometers traveled by car, because people of all cultures and social groups will no longer have the obstacle of having to manually drive. Children, people with disabilities, and the elderly will have much easier access to transport, without having to drive. Replacing 50% of all vehicles in traffic with autonomous ones could save 9600 lives, reduce accidents by nearly 2 million, save 160 billion USD, reduce traffic congestion by 35 percent, and save about 1700 travel hours [5,6].
A Global Positioning System (GPS) or inertial measurement units (IMU) system can determine the exact position of a car, not only when it has a continuous flow of data, but also when the data are received with certain errors. Therefore, most experts or transport engineers and scientists working in the area of autonomous vehicles propose to connect both these systems so that there would be a possibility to precisely determine the positioning of the car in real time [7,8,9].
It is not just the connection between the car systems themselves that is important (V2V—Vehicle to Vehicle), but also the communication between car and road infrastructure (V2I—Vehicle to Infrastructure). This increases the responsibility of the infrastructure for the overall coordination of traffic flow and provides easier spatial orientation of the car with faster decision-making. This would have a major impact on road conductivity, car emissions, and time costs [10,11].
It is clear that the use of ITS in the city will be effective only if a unified system linking vehicles, multimodal transport infrastructure, and traffic management is developed. Data and information should be transferred from one vehicle to another (V2V), between vehicles and infrastructure (V2I), and vice versa, and from one piece of infrastructure to another (I2I). Cooperative Intelligent Transport Systems (C−ITS) enables real-time communication between vehicles, road infrastructure, and road users. The vehicles and road elements operating in the system have Intelligent Transport Systems (ITS) stations with a standardized structure, consisting of communication and hardware. Continuous wireless communication between all three groups ensures traffic safety, traffic management, efficiency, and generates a net positive impact on the environment. The main difference between C-ITS and ITS is that there is a connection between infrastructure and personal devices (V2P), and a connection between personal means and vehicles (P2V). Taking into account the available data, intelligent transport systems have been installed and developed, as well as the adaption of autonomous cars at the appropriate level in the common transport system.
Researchers in France and the United States point out, in an article published in 2016 [12], that the emergence of autonomous cars on city streets will pose enormous challenges. They agree that autonomous vehicles should reduce accidents, but will sometimes have to choose between two evils, such as driving through pedestrians or sacrificing oneself and/or one’s passenger to save pedestrians.
Australian scientists proposed that shared autonomous vehicles (SAVs) could provide inexpensive mobility and on-demand services [13]. In addition, the autonomous vehicle technology could facilitate the implementation of dynamic ride-sharing (DRS). For this purpose, a stated choice survey was conducted and analyzed using a mixed logit model. The results show that service attributes, including travel cost, travel time, and waiting time, may be critical determinants of the use of SAVs and the acceptance of DRS. Also, the results imply that the adoption of SAVs may differ across cohorts, whereby young individuals and individuals with multimodal travel patterns may be more likely to adopt SAVs [13].
Ratner points out that cities and states must shape tax policy to directly confront the range of impacts autonomous vehicles will have over the next several decades. Autonomous vehicles are expected to decrease emissions overall and strengthen productivity [14].
Talebpour and Mahmassani focused on one of the most hazardous traffic situations: the possible collision between a pedestrian and a turning vehicle at signalized intersections. They presented a probabilistic model of pedestrian behavior to signalized crosswalks. In order to model the behavior of pedestrians, they took not only pedestrian physical states but also contextual information into account. They proposed a model based on the Dynamic Bayesian Network which integrated relationships among the intersection context information and the pedestrian behavior in the same way as a human. The particle filter was used to estimate the pedestrian states, including position, crossing decision, and motion type. Experimental evaluation using real traffic data showed that this model is able to recognize the pedestrian crossing decision in a few seconds from the traffic signal and pedestrian position information. This information was assumed to be obtained with the development of Connected Vehicle [15].
Millard-Ball performed an analysis without considering strategic interactions with other road users. He used game theory to analyze the interaction between pedestrians and autonomous vehicles, focusing on driving at a crossing. He found that the strategic shortcomings of the autonomous vehicle in cities would slow down all traffic [16].
Chinese and Pakistani researchers proposed a new cellular automata model to address this issue, where different autonomous and manual vehicles and manual are compared in terms of fundamental traffic parameters. Their model results suggest that autonomous vehicles can raise the flow rate of any network considerably, despite the running heterogeneous traffic flow [17].
Medina-Tapia and Robusté created a model for a circular city based on continuous approximations, considering demand surfaces over the city. Numerical results from our model predict direct and indirect effects of connected and autonomous vehicles. Direct effects will be positive for our cities: less street supply is needed to accommodate the traffic, congestion levels decrease: travel costs may decrease by 30%. Some indirect effects will counterbalance these positive effects: a decrease of 20% in the value of travel time can reduce the total cost by a third; induced demand could be as high as 50%, bringing equivalent total costs in the future scenario; the vehicle-kilometers traveled could also affect the future scenario; and increases in city size and urban sprawl [18].
A paper from Hungarian researchers proposed a tunable intersection control algorithm for autonomous vehicles, with the aim to minimize both traveling time and energy consumption while guaranteeing collision-free passage of the vehicles. For this purpose, a Model Predictive Control has been designed with tunable performances. The proposed algorithm was validated in the CarSim environment by comparing its solution with a simulation-based optimization. Also, a complex example was tested with a newly entering vehicle joining the optimization process. The results demonstrated the effectiveness of the proposed centralized controller [19].
Other researchers proposed a multilevel cloud system for autonomous vehicles which was built over the Tactile Internet. In addition, base stations at the edge of the radio-access network (RAN) with different technologies of antennas are used in our system. Finally, simulation results show that the proposed system with multilevel clouding can significantly reduce the round-trip latency and the network congestion. In addition, our system can be adapted in the mobility scenario [20].
An analysis of the scientific literature led to the conclusion that the breakthrough in the development of autonomous cars will only intensify in the near future. This breakthrough is likely to be further exacerbated by the European Union’s green course, which is Europe’s new growth strategy. Its goal is to become the world’s first climate-neutral continent by 2050. All industrial value chains will play a key role in this process, as all investment will focus on increasing the economy’s resilience to climate change. In order to contribute to the set goals, we, set the following tasks:
- Identify groups of key criteria that will pose the greatest challenges for the development of autonomous cars in the city;
- Carry out a survey of experts from both Lithuania and other countries (Sweden, Italy, Estonia, Latvia, Poland, and Croatia) and use the Kendall method to calculate the weights of the main groups of criteria;
- Offer at least three autonomous car travel development concepts, which should become a conceptual tool for the ongoing development of ITS and C-ITS;
- Present the conclusions of the scientific discussion at the end of the article.
2. Compilation and Evaluation of the List of Main Groups of Criteria
The list of the main groups of criteria was compiled by means of an expert analysis of various articles, published by researchers from other countries. After the authors agreed on the final list of criteria, it was submitted to the experts for evaluation. The experts were selected on the basis of work experience and possession of a scientific degree in the field of examination. The expert group consisted of 13 experts working in Lithuania (innovation, ITS, electronic communications, autonomous car legislation, and policy-making areas) and 8 experts from other countries (Sweden, Italy, Estonia, Latvia, Poland, and Croatia). Twenty-two experts questionnaires were sent for peer review, indicating the criteria of the main groups selected by the authors. The Kendall method was chosen for the evaluation, the essence of which is to evaluate the criteria on a scale of one to eight and to rank them from the highest to the lowest value of the criterion. Also, each expert was given the opportunity to comment and make suggestions on the selected criteria. Following the evaluation of the expert surveys, no comments or suggestions were received on the proposed criteria. After evaluating the questionnaires completed by twenty-two experts, twenty-one expert questionnaires were selected for further evaluation, but one questionnaire was incorrectly completed, and thus was rejected.
It is important to mention that the aim of our research was to identify the groups of key criteria that will pose the greatest challenges for the future development of autonomous cars in the city. Once the groups of key criteria have been identified, future scientific articles will examine the quantitative and qualitative criteria for each group separately. The following are selected key groups of criteria and their brief descriptions (Figure 1).
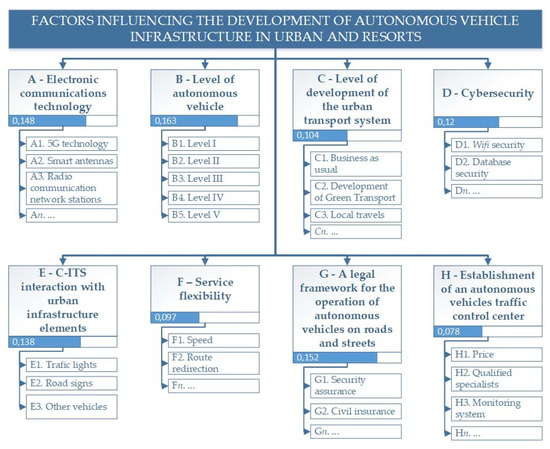
Figure 1.
Criteria weights for the main groups of criteria.
Group A. Electronic communications technology. Recently, especially in countries in the European Union, public reactions and spreading misinformation on the topic of 5G communication have been observed. This group was selected by our co-authors because autonomous car manufacturers emphasize that 5G communication technologies, due to their features and essential operating principles, must emerge in cities to ensure the uninterrupted movement of autonomous cars. Also, we see a high risk of public concern about the dissemination of misinformation about the effects of 5G on the environment, human health, and even the links with COVID-19. However, the European Commission notes that the European Union has the highest standards of consumer protection in the world, the protection of public health and the security of citizens is a priority, and that the same highest standards of security apply to the new e-communication technology generation.
Group B. Level of car autonomy. Currently, most experts agree that the level of autonomy of the car is at technological level 3. According to the SAE International Technical Standard [21], a fully autonomous car is currently what is being pursued, with development moving in a consistent direction to reach such a goal. In addition, there are a variety of automated control options that are already available on the market that can automate part of the driving process. SAE International Technical Standard [21] provides a taxonomy for motor vehicle automation ranging in level from no automation to full automation (Table 1). However, it provides detailed definitions only for the highest three levels of automation provided in the taxonomy (namely, conditional, high, and full automation) in the context of motor vehicles (hereafter also referred to as ”vehicle“ or ”vehicles“) and their operation on public roadways. These latter levels of advanced automation refer to cases in which the dynamic driving task is performed entirely by an automated driving system during a given driving mode or trip. Popular media and legislative references to “autonomous“ or “self-driving“ vehicles encompass some or all of these levels of automation. These definitions can be used to describe the automation of (1) on-road vehicles, (2) particular systems within those vehicles, and (3) the operation of those vehicles. ”On-road“ refers to public roadways that collectively serve users of vehicles of all classes and automation levels (including no automation), as well as motorcyclists, pedal cyclists, and pedestrians.

Table 1.
SAE International Technical Standard provides Terminology for Motor Vehicle Automated Driving Systems [21].
The main higher goals of automatic steering are the following [22]:
- Safety: reduce accidents caused by human error;
- Efficiency and environmental objectives: increase the efficiency of the transport system and reduce congestion through new urban mobility solutions. It will also facilitate smoother urban traffic and reduce vehicle energy consumption and emissions;
- Convenience: enable user freedom for other activities when automated systems are activated;
- Social inclusion: ensure all user groups can utilize the transport, including the elderly and the disabled;
- Accessibility: facilitate access to the city center.
Group C. Level of development of the urban transport system. Each city’s transport system and its development level are different and often depend on the historically formed network of streets and the location of buildings with various intended purposes. This set of criteria is very much needed for autonomous cars, which are assessed from levels 1–3 [21]. As a practical example, in 2017, for the first time in Lithuania, an autonomous vehicle was tested on the streets of Vilnius Old Town. During testing, the vehicle faced challenges with the level of infrastructure development of the existing urban transport system. The autonomous car was not able to recognize the stationary “green arrow sign“ on the traffic lights, the intensive movement of pedestrians and cyclists in the narrow streets of the old town hindered the smooth movement of the autonomous vehicle, and it was unable to recognize temporary road signs, and so on.
Group D. Cyber security. It is obvious that the technologies of the future will radically change our lives—autonomous smart devices (pumps, lawn mowers, etc.), autonomous cars, virtual reality, and so on. Some experts estimate that there are currently about 200 billion devices connected to the Internet that are programmable and automated, and such changes are drastically changing our lifestyle habits. However, there is a huge problem—most technologies can be hacked or disabled. Every year, thousands of security vulnerabilities are discovered in the equipment of well-known manufacturers. A few of them are some of the strongest in cyber security, but still face a myriad of security challenges every year.
Group E. Interoperability of C-ITS with urban infrastructure elements. This set of criteria is one of the most important for the interaction of autonomous vehicles with the ecosystem of infrastructure elements. In order for autonomous vehicles to move freely on city streets, safe and developed infrastructure must be in place, and to achieve this, communication between vehicles and infrastructure must be also be present. The importance of this set of criteria can be justified by a South Korean research project that, in 2017, installed a 320,000 m2 city-wide area (K-City) for autonomous cars that is being tested under real conditions.
Group F. Service flexibility. It is likely that autonomous cars will appear in every city in the near future, although in the beginning, they may be used mainly in public transport, designed to carry a larger number of passengers. However, for them to appear on urban streets, a competitive range of services must be offered to compete with what traditional public transport has to offer. For example, autonomous cars must be fast, safe, comfortable, have the ability to re-route in the event of a change in weather conditions or accidents, and overall offer a more effective service.
Group D. A legal framework has been created that does not hinder the operation of autonomous vehicles on roads and streets. Most countries in the world are already working intensively on the legal framework for autonomous vehicles. The aim is to allow manufacturers not only to test autonomous vehicles as soon as possible, but also to allow consumers to use them safely in public traffic. For example, in 2011, the U.S. state of Nevada was the first to legalize autonomous car testing on public roads and Japan launched the first autonomous car tests on public roads in 2013. EU countries are also working hard on changes to the legislation, but there is a greater focus on autonomous car testing. The reason for this is that it is not yet entirely clear who takes responsibility for accidents in public traffic; when the accident occurred through the fault of the autonomous vehicle, the conditions of compulsory civil insurance, etc., have not been resolved and discussed.
Group H. Establishment of an autonomous traffic management center. As the number of autonomous cars will only increase in the future and they will be moving without drivers, there will be a need to set up autonomous traffic control centers. Universities will have to develop study programs that will train suitably qualified IT specialists, autonomous vehicle operators, autonomous transport engineers, and so on. These professionals will need to be able to remotely implement coordination processes related to the autonomous vehicle infrastructure ecosystem. The main function of this center would be to provide autonomous vehicle management services, autonomous vehicle ecosystem monitoring, and other functions.
Following an expert survey, the consistency of expert opinions needs to be assessed. When calculating the correlation coefficient, it is possible to determine whether the opinions of two experts are agreed, but if the number of experts is higher, the concordance coefficient W is calculated according to the concordance coefficient W [23,24,25,26,27].
First, the sum of the rank of each evaluation indicator is determined according to Equation (1):
where Pjk—k-th expert evaluation for the j-th assessment indicator, k—the experts authority coefficient.
The following is the average value of the evaluation indicator according to Equation (2):
where ”r“ is the number of experts.
The sum of the squares of the deviations of the evaluation results for each evaluation indicator according to Equation (3):
where ”m“ is the number of evaluation indicators.
The average sum of the ranks of all evaluation indicators is calculated according to Equation (4):
The concordance coefficient W is calculated according to Equation (5):
If the χ2 calculated using Equation (5) is greater than the χ2lent according to the table, obtained from the table expression χ2 table with a certain degree of freedom , and assuming a significance level of α = 0.05 (the usual value of α used in practice), the expert opinions are considered to be consistent.
When calculating the significance of evaluation indicators, the best value is the largest numerical expression [28,29,30]. The significance of the evaluation indicators is calculated according to Equation (6):
The sum of the significance indicators of the calculated assessment indicators is equal to 1. Significance indicates how many times one assessment indicator is more important than another assessment indicator. Taking advantage of this, it is possible to carry out a further selection of assessment indicators and select only those assessment indicators that have the highest value in each intended group [31,32,33,34].
Calculations using the Kendall method show that the group B criterion, “level of car autonomy“ (0.163), will have the greatest weight for the development of alternative car trips with autonomous cars. The second most important was elected by the experts to be the Group G criterion “legal framework created that does not hinder the operation of autonomous vehicles on roads and streets“ (0.152). The experts chose third place to be Group A criterion “electronic communications technology“ (0.148). More detailed criteria weights for the main groups of criteria are shown in Figure 1.
3. Autonomous Car Travel Development Concepts
Taking into account the available data, intelligent transport systems have been installed and developed, as well as the adaption of autonomous cars at the appropriate level in the common transport system, the authors have offered three autonomous car trip development concepts.
The first concept involves autonomous smart travel planning from the point of choice to the final point (Figure 2). Travel planning is performed using only developed intelligent transport systems and the start and end points are determined using GPS coordinates. According to the obtained GPS movement, vehicles, and services are selected for possible use (private car, public transport (buses, trolleybuses, metro, tram, etc.)), as well as transport sharing services (cars, bicycles, scooters, etc.), and transportation services (on-demand transport) or a combination thereof, and the trip route is planned and finalized. The travel plan also includes different types of movement (by foot, while driving or waiting), as well as providing vehicle (mode of transportation) change points (stops, stations, Park and Ride sites, etc.).
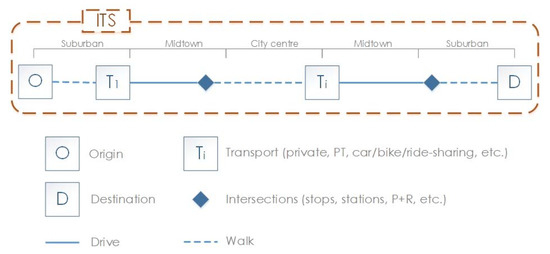
Figure 2.
The first concept.
Prerequisites for ITS to operate throughout the whole territory, i.e., in the suburbs, the midtown area, and the city center, and the location of public transport stops, transfer and traffic sharing service sites must be close to the start and end points.
This concept could include level 0–1 autonomous vehicles, where the driver must monitor traffic conditions and control the vehicle during the journey. In essence, this concept does not replace the existing transport system, it facilitates only the planning and re-planning of the travel route in the current time, depending on the traffic situation and the circumstances prevailing throughout the transport system. Thanks to convenient travel planning and a large choice of vehicles, this concept allows you to partially give up your own car, requires no greater need for parking spaces in the city, and reduces vehicle traffic in the central area of the city.
The second concept involves self-intelligent travel planning from the point of choice to the end point, involving autonomous vehicles operating in the transport system (Figure 3). Travel planning is carried out using both developed intelligent transport systems and adapting the capabilities of cooperative intelligent transport systems. The start and end points are determined using GPS coordinates. According to the obtained trajectory, possible vehicles and services are selected (analogous to the first concept) or a combination thereof, and autonomous vehicles or their systems (public transport, transport sharing services) are included and the trip is planned. The travel plan also includes different types of movement (by foot, while driving or waiting), as well as providing vehicle (mode of transportation) change points (stops, stations, Park and Ride sites, etc.).
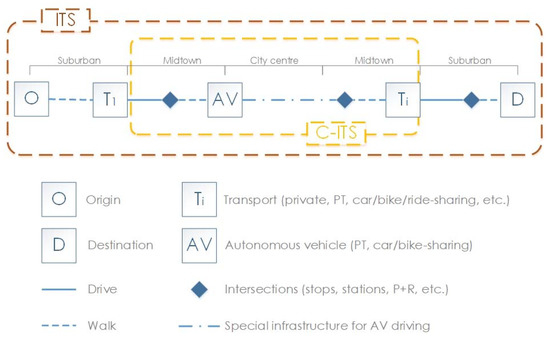
Figure 3.
The second concept.
According to this concept, ITS should operate throughout the territory, i.e., in the suburbs, the midtown area, and the city center, and the operation of C-ITS should be ensured in the central part of the city, and as far as possible into the midtown area. Such a communication system could be operated by level 2–3 autonomous vehicles, where the AV accelerates, brakes, and drives itself, but the driver must be ready to drive the car in case of changes in traffic conditions and take control of the vehicle at any time. In areas with an uninterrupted traffic regime (often in the midtown part of the city), the driving environment is monitored by the autonomous car system, in areas with heavy traffic with different transport modes (often in the city center, where it is difficult to predict obstacles—pedestrians, cyclists, goods delivery transport, etc.—the driving environment must be monitored by the driver and, if necessary, the driver should take control of the autonomous car).
The operation of this concept requires the development of additional infrastructure to ensure a smooth real-time connection between vehicles, road infrastructure, and road users. The safe and secure operation of the system requires a communication signal that is reliable, free, and has a low latency. The main means used to support such a communication signal are Dedicated Short Range Communications (DSRC). This connection uses 5.9 GHz radio waves. It is very important that C-ITS can interact not only with the 5.9 GHz signal, but also with other rapidly evolving signals, such as 2G, 3G, 4G, WiMax, and so on. Also, due to the different operating principles of AV and conventional cars, they need to provide a separate traffic infrastructure or redevelop the existing, separate lanes only for AV.
Thanks to convenient travel planning and a large selection of vehicles, this concept allows you to partially give up your own car. The operation of AV in the central part of the city would reduce investments in transport infrastructure (parking lots, new street connections) by reducing the number of vehicles, reducing traffic congestion, increasing the attractiveness of autonomous public transport or transport sharing services.
The third concept is described as including intelligent smart travel planning from the point of choice to the final point, using only autonomous vehicles (Figure 4). Travel planning is carried out using both developed intelligent transport systems and adapting the capabilities of cooperative intelligent transport systems. The start and end points are determined using GPS coordinates. Based on the obtained trajectory, the AV itself selects the optimal route and plans the trip. In this concept, AV can be used as any mode of transport (private transport, public transport, transport sharing services, freight transport, shuttle/taxi services, etc.). The travel plan also includes different types of movement (by foot, while driving or waiting), as well as providing vehicle (mode of transportation) change points (stops, stations etc.).
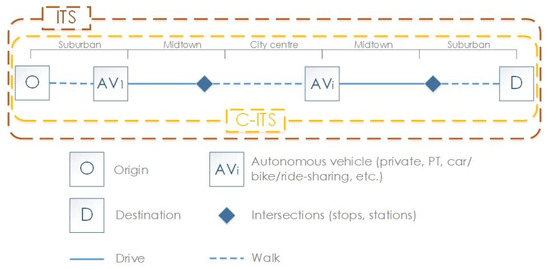
Figure 4.
The third concept.
According to this concept, ITS, and as far as possible C-ITS, must operate throughout the territory, i.e., in the suburbs, the midtown area, and the city center. Such a communication system could operate level 4–5 autonomous vehicles, where AV automatic control can fully control the vehicle, maintain vehicle control, even when the driver does not intervene in the event of changed driving conditions (for example, in an emergency).
The existing communication infrastructure can be adapted to the operation of this concept; it is necessary only to ensure the communication signals for the operation of the system, which would be reliable, free of charge, and with a short time delay.
This concept allows you to give up your own car, but there is a certain need to have your own AV. In any case, heavy AV traffic would be more efficient than any road transport system in operation to date. The integration of AV into the transport system would reduce investments in transport infrastructure (parking lots, new street connections, etc.), significantly reduce air pollution, the subsequent use of resulting free areas for green spaces, investment projects, and reduce traffic congestion and the number of accidents.
The proposed concepts for the development of autonomous cars infrastructure are principled, which should be used as a core for the development of further details of the systems. It is very important to understand that each city’s transport system is distinctive and has some unique features, while cities themselves and their urban development can also influence the application of the proposed concepts. Therefore, the concepts proposed by the authors should be seen as an axis for infrastructure development, while the specific elements, the combination of interoperability between the systems, etc., should be analysed in the context of a particular city.
4. Conclusions
Calculations using the Kendall method show that the criteria of the ”car automation level“ group (0.163), ”created legal basis that does not interfere with the operation of autonomous vehicles on roads and streets“ group (0.152), and ”electronic communications technology“ group criteria (0.148) will have the greatest weight for the development of alternative autonomous trips.
Taking into account the available data, intelligent transport systems have been installed and developed, as well as the adaptation of autonomous cars at the appropriate level in the common transport system, the best three autonomous car trip development concepts are as follows:
- The first development option includes autonomous smart travel planning from the point of choice to the final point (travel planning is performed using only developed intelligent transport systems and possible vehicles and services or a combination thereof are selected according to the obtained trajectory, after which the trip is planned);
- The second development option is where autonomous intelligent travel planning from the point of choice to the final point, and includes autonomous vehicles operating in the transport system (travel planning is carried out using both developed intelligent transport systems and adapting the capabilities of cooperative intelligent transport systems possibilities, as well as possible vehicles and services, which are selected and the trip is planned according to the obtained trajectory);
- The third development option is where independent intelligent travel planning from the point of choice to the final point is performed by using only autonomous vehicles (travel planning is performed using both developed intelligent transport systems and the capabilities of cooperative intelligent transport systems, as well as the AV, which itself chooses the optimal route and plans a trip).
Of all the possible development options, the first would have the least impact on the existing urban transport system, while the most realistic development option would be the second, where travel planning involves both autonomous and other vehicles. The second development option could be a step towards the achievement of third, where all travel planning is done using only autonomous vehicles.
Author Contributions
All authors contributed equally to this work. V.P. developed project idea, analysed data, conducted the expert interviews, contributed to draft the paper. J.D. developed the model of quantitative and qualitative data collection, created graphs and figures, outlined conclusions and recommendations, performed calculations of weights and multiple criteria analysis, created tables, and contributed to draft the paper. R.U.-V. developed project idea, led the development of the methodology and contributed to draft the paper. T.K. analysed data, contributed to the revision of draft version and improvement of final paper. All authors discussed the results and commented on the paper. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by Vilnius Gediminas Technical University.
Conflicts of Interest
The authors declare no conflict of interest.
References
- U.S. Department of Transportation National Highway Traffic Safety Administration. Traffic Safety Facts. 2015. Available online: https://crashstats.nhtsa.dot.gov/Api/Public/ViewPublication/812115 (accessed on 13 August 2020).
- Bertoncello, M.; Wee, D. Ten Ways Autonomous Driving Could Redefine the Automotive World. 2015. Available online: http://www.mckinsey.com/insights/automotive_and_assembly/ten_ways_autonomous_driving_could_redefine_the_automotive_world (accessed on 12 November 2012).
- Tokody, D.; Albini, A.; Ady, L.; Raynai, Z.; Pongrácz, F. Safety and Security through the Design of Autonomous Intelligent Vehicle Systems and Intelligent Infrastructure in the Smart City. Interdiscip. Descr. Complex Syst. 2018, 16, 384–396. [Google Scholar] [CrossRef]
- Koopman, P.; Wagner, M. Autonomous Vehicle Safety: An Interdisciplinary Challenge. IEEE Intell. Transp. Syst. Mag. 2017, 9, 90–96. [Google Scholar] [CrossRef]
- Thierer, A.D.; Hagemann, R. Removing Roadblocks to Intelligent Vehicles and Driverless Cars. Wake For. JL Pol’y 2014, 5, 339. [Google Scholar] [CrossRef]
- Young, K.L.; Rudin-Brown, C.M. Designing Automotive Technology for Cross-Cultural Acceptance. In Driver Acceptance of New Technology; Ashgate Publishing Limited: Surrey UK, 2018; pp. 317–332. [Google Scholar]
- Wang, S.; Deng, Z.; Yin, G. An Accurate GPS-IMU/DR Data Fusion Method for Driverless Car Based on a Set of Predictive Models and Grid Constraints. Sensors 2016, 16, 280. [Google Scholar] [CrossRef]
- Dedes, G.C.; Mouskos, K.C. GPS/IMU/Video/Radar Absolute/Relative Positioning Communication/Computation Sensor Platform for Automotive Safety Applications. U.S. Patent 8,639,426, 28 January 2014. [Google Scholar]
- Carratu, M.; Iacono, S.D.; Pietrosanto, A.; Paciello, V. Self-alignment procedure for IMU in automotive context. In Proceedings of the 2019 IEEE 17th International Conference on Industrial Informatics (INDIN), Helsinki, Finland, 22–25 July 2019; Volume 1, pp. 1815–1820. [Google Scholar]
- Malinverno, M.; Avino, G.; Casetti, C.; Chiasserini, C.F.; Malandrino, F.; Scarpina, S. Performance Analysis of C-V2I-Based Automotive Collision Avoidance. In Proceedings of the 2018 IEEE 19th International Symposium on ”A World of Wireless, Mobile and Multimedia Networks“ (WoWMoM), Chania, Greece, 12–15 June 2018; pp. 1–9. [Google Scholar] [CrossRef]
- Dong, C.; Wang, H.; Li, Y.; Liu, Y.; Chen, Q. Economic comparison between vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2I) at freeway on-ramps based on microscopic simulations. IET Intell. Transp. Syst. 2019, 13, 1726–1735. [Google Scholar] [CrossRef]
- Bonnefon, J.-F.; Shariff, A.; Rahwan, I. The social dilemma of autonomous vehicles. Science 2016, 352, 1573–1576. [Google Scholar] [CrossRef]
- Haboucha, C.J.; Ishaq, R.; Shiftan, Y. User preferences regarding autonomous vehicles. Transp. Res. Part C Emerg. Technol. 2017, 78, 37–49. [Google Scholar] [CrossRef]
- Ratner, S. Taxation of Autonomous Vehicles in Cities and States. 2018. Available online: https://papers.ssrn.com/sol3/papers.cfm?abstract_id=3285525 (accessed on 4 August 2020).
- Talebpour, A.; Mahmassani, H.S. Influence of connected and autonomous vehicles on traffic flow stability and throughput. Transp. Res. Part C Emerg. Technol. 2016, 71, 143–163. [Google Scholar] [CrossRef]
- Millard-Ball, A. Pedestrians, Autonomous Vehicles, and Cities. J. Plan. Educ. Res. 2016, 38, 6–12. [Google Scholar] [CrossRef]
- Tanveer, M.; Kashmiri, F.A.; Naeem, H.; Yan, H.; Qi, X.; Rizvi, S.M.A.; Wang, T.; Lu, H. An Assessment of Age and Gender Characteristics of Mixed Traffic with Autonomous and Manual Vehicles: A Cellular Automata Approach. Sustainability 2020, 12, 2922. [Google Scholar] [CrossRef]
- Medina-Tapia, M.; Robusté, F. Implementation of Connected and Autonomous Vehicles in Cities Could Have Neutral Effects on the Total Travel Time Costs: Modeling and Analysis for a Circular City. Sustainability 2019, 11, 482. [Google Scholar] [CrossRef]
- Mihály, A.; Farkas, Z.; Gáspár, P. Multicriteria Autonomous Vehicle Control at Non-Signalized Intersections. Appl. Sci. 2020, 10, 7161. [Google Scholar] [CrossRef]
- Khayyat, M.; Alshahrani, A.; Alharbi, S.; Elgendy, I.; Paramonov, A.; Koucheryavy, A. Multilevel Service-Provisioning-Based Autonomous Vehicle Applications. Sustainability 2020, 12, 2497. [Google Scholar] [CrossRef]
- SAE International. SAE International Technical Standart Provides Terminology for Motor Vehicle Automated Driving Systems. 2014. Available online: http://standards.sae.org/j3016_201401/ (accessed on 4 August 2020).
- ERTRAC. Connected Automated Driving Roadmap. Deliverable on ERTRAC Working Group ”Connectivity and Automated Driving“. 2019. Available online: https://www.ertrac.org/uploads/documentsearch/id57/ERTRAC-CAD-Roadmap-2019.pdf (accessed on 13 August 2020).
- Kendall, M. Rank Correlation Methods, 4th ed.; Griffin: London, UK, 1970; 272p. [Google Scholar]
- Kendall, M.G.; Gibbons, J.D. Rank Correlation Methods, 5th ed.; Oxford University Press: New York, NY, USA, 1990. [Google Scholar]
- Zavadskas, E.K.; Peldschus, F.; Kaklauskas, A. Multiple Criteria Evaluation of Projects in Construction; Technika: Vilnius, Lithuania, 1994. [Google Scholar]
- Zavadskas, E.K.; Vilutienė, T. A multiple criteria evaluation of multi-family apartment block’s maintenance contractors: I—Model for maintenance contractor evaluation and the determination of its selection criteria. Build. Environ. 2006, 41, 621–632. [Google Scholar] [CrossRef]
- Palevičius, V.; Burinskienė, M.; Antucheviciene, J.; Šaparauskas, J. Comparative Study of Urban Area Growth: Determining the Key Criteria of Inner Urban Development. Symmetry 2019, 11, 406. [Google Scholar] [CrossRef]
- Ginevicius, R. A new determining method for the criteria weights in multi-criteria evaluation. Int. J. Inf. Technol. Decis. Mak. 2011, 10, 1067–1095. [Google Scholar] [CrossRef]
- KrishanKumar, R.; Ravichandran, K.; Kar, S.; Cavallaro, F.; Zavadskas, E.K.; Mardani, A. Scientific Decision Framework for Evaluation of Renewable Energy Sources under Q-Rung Orthopair Fuzzy Set with Partially Known Weight Information. Sustainability 2019, 11, 4202. [Google Scholar] [CrossRef]
- Roy, J.; Sharma, H.K.; Kar, S.; Zavadskas, E.K.; Saparauskas, J. An extended COPRAS model for multi-criteria decision-making problems and its application in web-based hotel evaluation and selection. Econ. Res. -Ekon. Istraživanja 2019, 32, 219–253. [Google Scholar] [CrossRef]
- Lakusic, S.; Barauskas, A.; Mateckis, K.J.; Palevičius, V.; Antucheviciene, J. Ranking conceptual locations for a park-and-ride parking lot using EDAS method. J. Croat. Assoc. Civ. Eng. 2018, 70, 975–983. [Google Scholar] [CrossRef]
- Podvezko, V.; Zavadskas, E.K.; Podviezko, A. An extension of the New Objective Weight Assessment Methods Cilos and Idocriw to Fuzzy Mcdm. Econ. Comput. Econ. Cybern. Stud. Res. 2020, 54, 59–76. [Google Scholar] [CrossRef]
- KrishanKumar, R.; Mishra, A.R.; Ravichandran, K.S.; Peng, X.; Zavadskas, E.K.; Cavallaro, F.; Mardani, A. A Group Decision Framework for Renewable Energy Source Selection under Interval-Valued Probabilistic linguistic Term Set. Energies 2020, 13, 986. [Google Scholar] [CrossRef]
- Zolfani, S.H.; Chatterjee, P. Comparative Evaluation of Sustainable Design Based on Step-Wise Weight Assessment Ratio Analysis (SWARA) and Best Worst Method (BWM) Methods: A Perspective on Household Furnishing Materials. Symmetry 2019, 11, 74. [Google Scholar] [CrossRef]




Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).