A Flexible Tool for Modeling and Optimal Dispatch of Resources in Agri-Energy Hubs





Abstract
1. Introduction
- Ehub Modeling Tool [34]. This consists of a set of MATLAB® scripts for creating input case study data, which are sent and then executed in the optimization package AIMMS. It also incorporates R code for visualizing the results of the simulations. A subsequent version was released in Python, which includes a graph-based modeling tool. Software available at: https://github.com/hues-platform/ehub-modeling-tool.
- EHCM Toolbox [35]. An object-oriented programming tool that was conceived to deal with the control necessities of a building and entirely in MATLAB®. Consequently, it might lack flexibility in certain aspects, which is counterbalanced by a sophisticated model for batteries and the possibility to integrate detailed building dynamics from another toolbox. Software available at: https://control.ee.ethz.ch/software/BRCM-Toolbox1.html.
- MATPOWER Optimal Scheduling Tool [36] (MOST). This is an extension of the MATPOWER package, a free and open-source set of MATLAB® files for solving steady-state electric power scheduling problems. MOST can be used to solve from simple deterministic unconstrained problems to stochastic, security-constrained, combined unit-commitment, and multi-period optimal power flow problems. The current implementation is limited to DC power flow modeling of the network, so it is a bit limited when it comes to multi-energy systems (MESs) and EHs. Software available at: https://github.com/MATPOWER/most.
- IMAKUS [37]. This is the name given to a deterministic model of the German power system aimed at making investment decisions on storage and conventional generation assets. Although it was implemented in MATLAB® code using a generic formulation, its authors do not clarify its possible use on other regions or with other resources than electricity. No support website.
- LUSYM [38]. A tool quite similar to MOST in the sense that it is focused on the electricity sector and allows the introduction of nearly the same constraints in the problem. The main difference resides in the use of GAMS together with MATLAB®, which are interfaced so that GAMS is used for solving the optimization problem and MATLAB® for processing the input and output data. No support website.
- EUPowerDispatch [39]. This is another tool for the optimal dispatch of the power system, but particularized at the European level, and it uses GAMS and MATLAB® in the same way that LUSYM does. More information available at: https://ses.jrc.ec.europa.eu/eupowerdispatch-model.
- Software Library for Multi-Energy Systems (an official name has not been given yet) [40]. This is probably the most flexible and complete of the alternatives, is based on object-oriented programming, and is derived from the generalized modeling framework for MESs proposed by Long. It is intended to be used for MPC applications rather than scheduling problems. The same version was built both in Python and MATLAB®, although none of them is freely available. No support website.
2. Conversion and Storage Model
2.1. Prior Formulation
2.2. Device-Dependent Fixed and Variable Loads
3. ODEHubs Toolbox
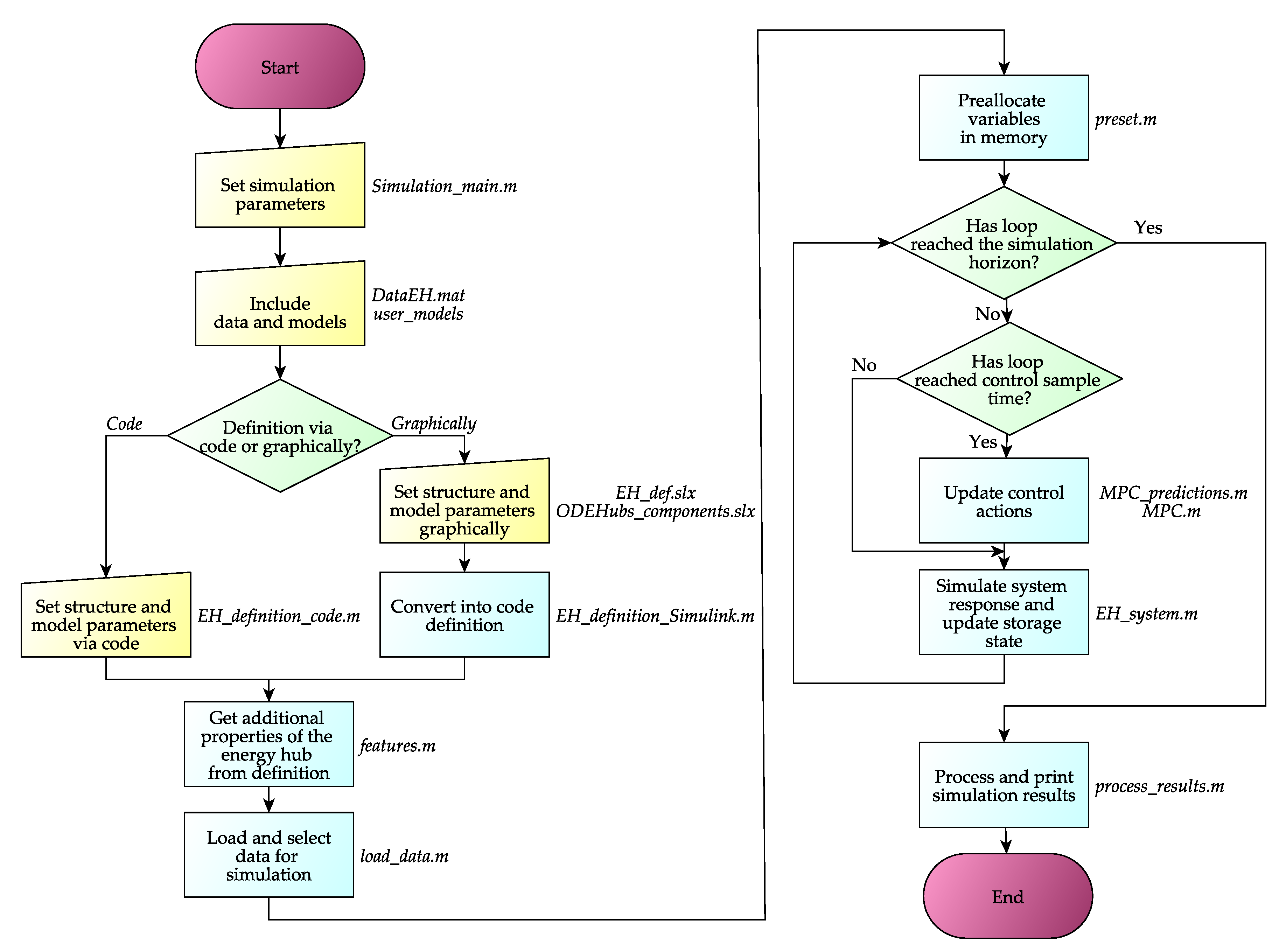
- Simulation_main.m is the base of the flowchart and is where most functions are called. At the beginning of the file, a set of parameters, whose use is clarified below, are declared, and users might need to modify these lines prior to simulation. A struct variable called EH is created during its execution and used to store variables and communicate them to other functions.
- DataEH.mat is a file in the binary data container format that the MATLAB® program uses, with a single timetable variable called dataEH stored in it. This type of variable allows the grouping of column-oriented data in a table where each row represents a date and time. Thus, the columns consist of all the time-dependent variables required to simulate the system, such as the demanded outputs or weather conditions. Users are responsible for including the data that they need in this format, with the freedom to choose the name of each column/variable. Columns may be empty if no data are required to be loaded, but the timetable needs to be generated according to the simulation start time and horizon (see these parameters’ definition below).
- The folder user_models contains any function that users might need to define time-variable parameters in Equations (1)–(17). They need to be arranged following the syntax parameter = function (data, date, samples, tm), so that parameter is a vector of values obtained from data (which is an automatically filtered version of dataEH) starting at the time declared in date in each tm period of time during the horizon samples.
- EH_definition_code.m is the function employed to set the properties of the energy hubs, and it includes the parameters related to Equations (1)–(17) via MATLAB® code. The file provided by the authors of this work for the case study presented in Section 4 can be used as a template for other systems just by adapting its content.
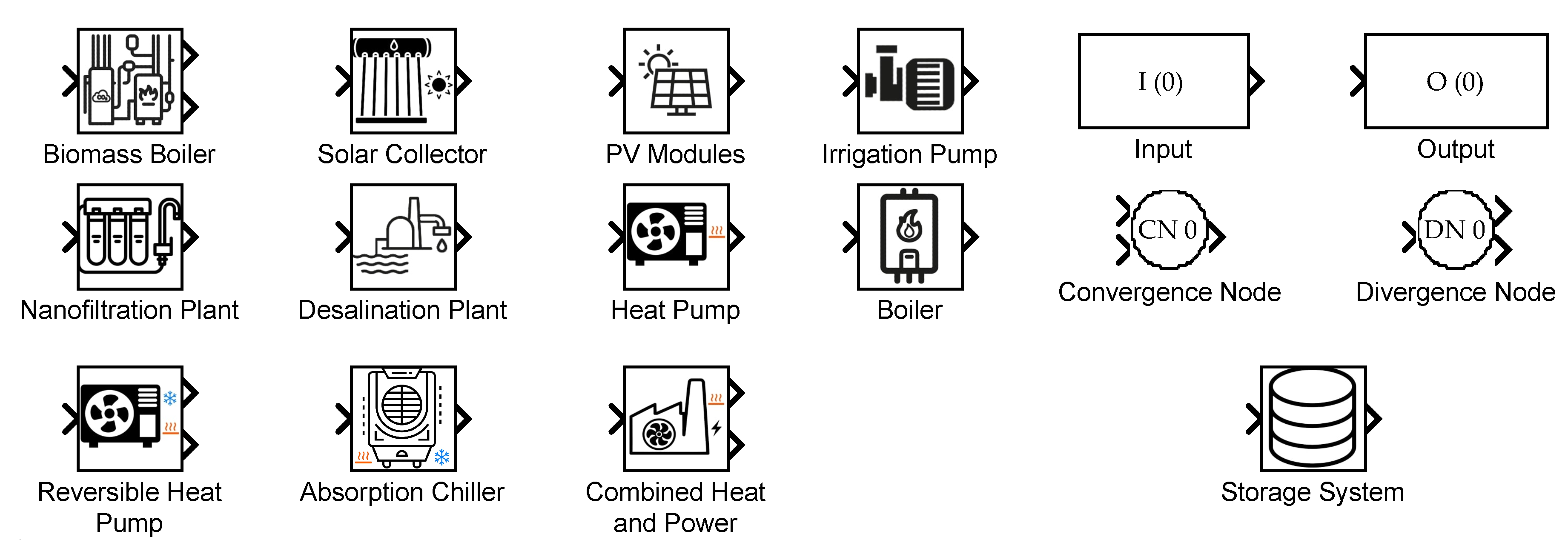
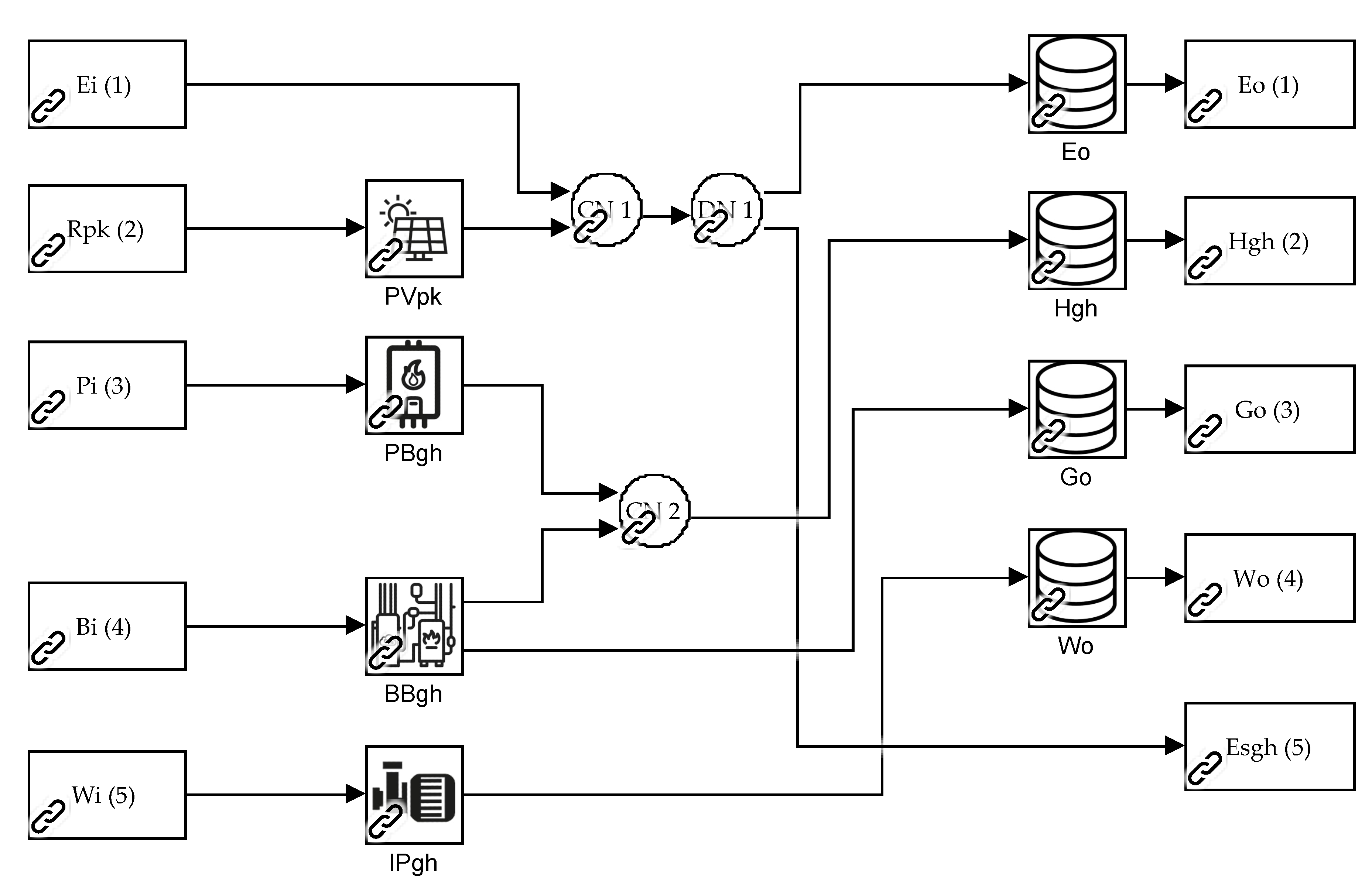
- ODEHubs_components.slx is the Simulink® library, which, with the support of the user_models folder, incorporates the predefined models of several storage and conversion devices developed during the CHROMAE project [21] (Figure 3). Its blocks, which are described in the next subsection, are employed to build Simulink® models that represent any EH either by copying and pasting from the library or by dragging from the library browser if ODEHubs_components.slx is added. As in any other library, the file is locked when first opened, but users, and even the developers in future releases of ODEHubs, might add new blocks if necessary.
- EH_def.slx is the default name given to the Simulink® model employed to define the EH graphically, although any other syntactically valid name can be used if specified in Simulation_main.m, which easily allows one to change between different EHs in each simulation. The case study presented in Section 4 constitutes an example of how to build and configure this file.
3.1. ODEHubs’s Block Library
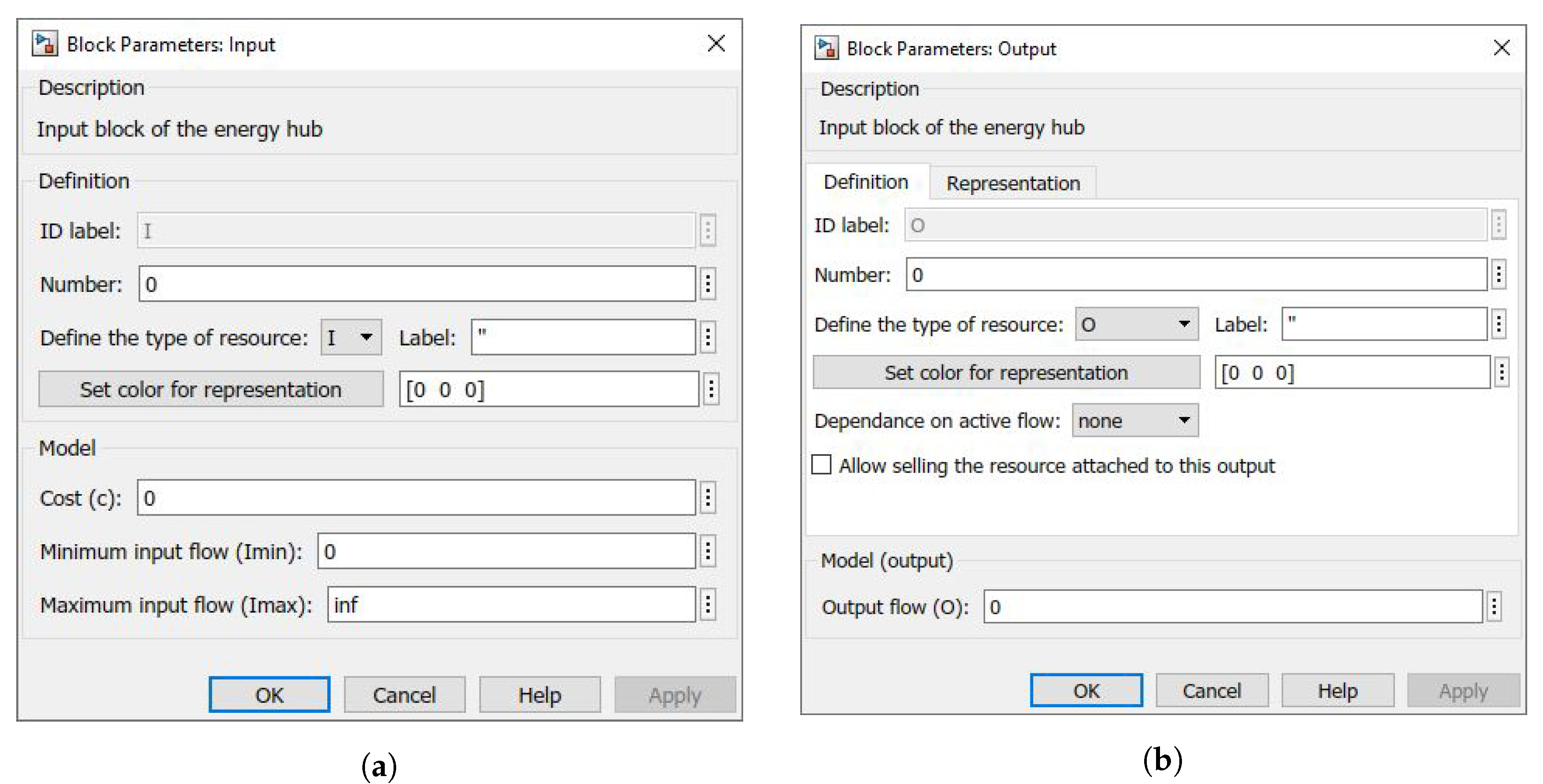
- Input blocks (Figure 4a) characterize the available resources of the EH. Their main parameters are the cost of acquiring the resource, part of vector , and the maximum and minimum values of the input flow, which compose vectors and .
- Output blocks (Figure 4b) characterize the loads or demands of the EH. Their main parameter is the value of this flow, part of vector O, or, alternatively, the constant of proportionality mentioned in Section 2.2, if it is a variable device-dependent load. The mask of these blocks allows the definition of this dependence as well as the sale of resources through that output, in which case additional parameters are made visible and editable: the price of selling the resource, part of vector , and the maximum and minimum values of the market flow, which compose vectors and .
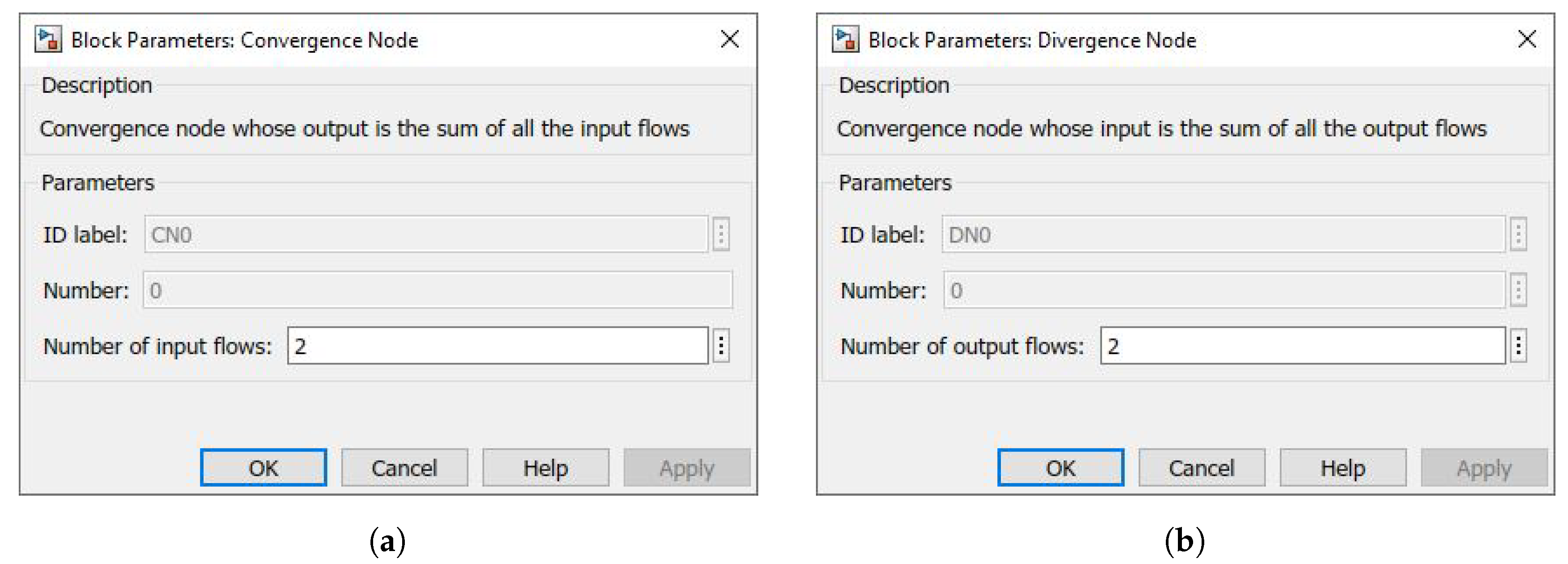
- convergence Node and Divergence Node blocks (Figure 5) do not currently have any utility and, in practice, could be omitted, but, because of the way Simulink® treats the signals between blocks, they will be needed in future releases of ODEHubs to allow users to merge and split flows numerically in simulations via Simulink®. For this reason, the diagrams must incorporate these blocks at any time that several flows converge into a single flow (so the sum of the original flows equals the resulting flow) or whenever a flow diverges into different sub-flows (so the sum of the sub-flows equals the original flow). Their only configurable parameter is the number of converging or diverging flows, respectively.
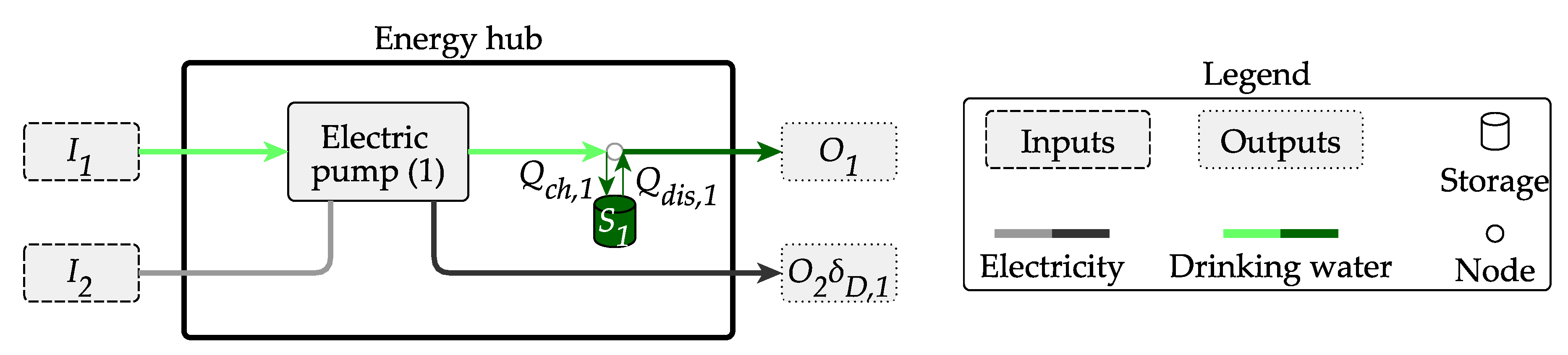
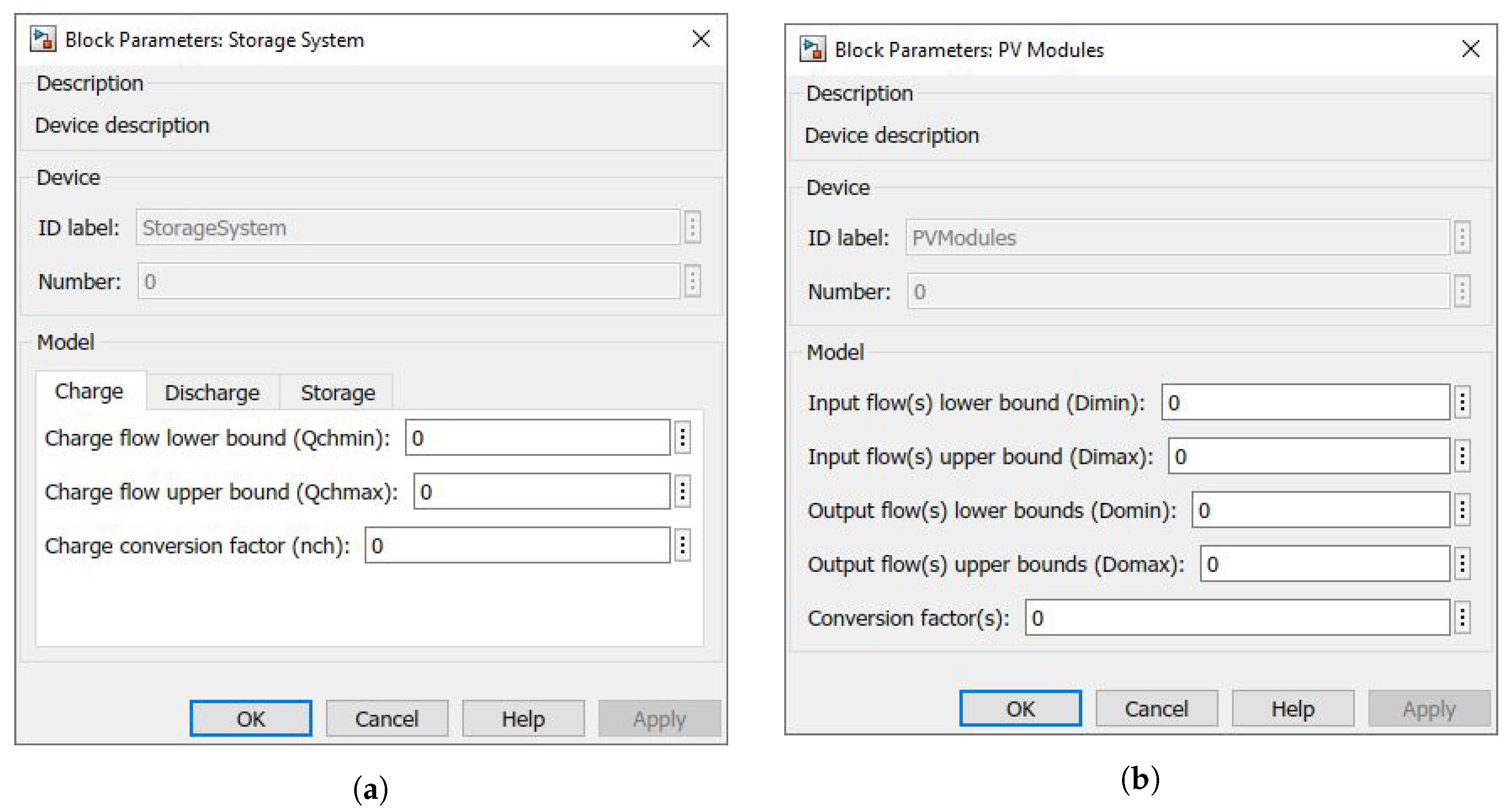
- or less Storage System blocks (Figure 6a) need to be used to characterize the storage devices of the EH. The output of each of these blocks must be connected any Output block where energy, mass, or volume is stored. Their parameters, which are arranged in tabs, allow the definition of the charge and discharge flows and the capacity of each storage system, so they are elements of the vectors , , , , , and ; they also allow the definition of the efficiency of each storage process, taking part of the matrices , , and . Additionally, the initial state of the storage system must be defined in the Storage tab.
- blocks (Figure 6b) corresponding to devices need to be included in the Simulink® model employed to define the EH graphically. As depicted in Figure 3, ODEHubs’s library consists of some predefined blocks with the same parameters: limits for the input(s) and output(s) of each device related to vectors , , , and , and the conversion factor(s) between them, which are required to build matrices , , and .
3.2. Main Configuration Parameters
- EH.simparam.nm defines the simulation horizon and, thus, depending on EH.simparam.tm, how many times the loop is executed to obtain the evolution of the system according to its dynamic, that is, updating the state of the storage systems through EH_system.m (which is still in its beta phase).
- EH.simparam.tm defines the time between two consecutive steps of the system’s simulation.
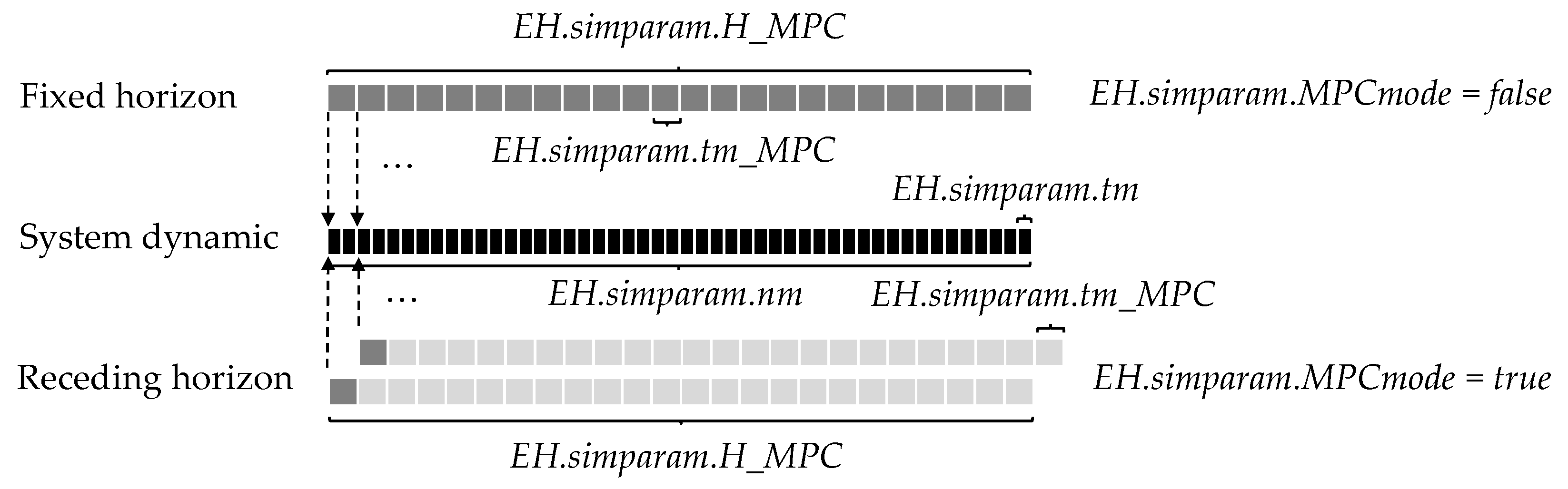
- EH.simparam.tm_MPC defines the time between two consecutive updates of the control action, which is calculated by MPC.m and kept constant at each iteration if EH.simparam.tm_MPC>EH.simparam.tm, and, together with EH.simparam.H_MPC, the number of samples of the model employed for optimization. It cannot be lower than the sample time of the system EH.simparam.tm.
- EH.simparam.H_MPC defines the control horizon, which can be lower than EH.simparam.nm if only the first control action is computed (receding horizon strategy), but needs to be equal to this one for the scheduling mode (fixed horizon strategy). In the first case (MPC mode active), ODEHubs allows also one to apply the variable horizon strategy exemplified in [41].
- EH.simparam.MPCmode determines whether the fixed horizon strategy or the receding horizon strategy is applied. Note that dataEH must contain data for EH.simparam.nm in the first case and for EH.simparam.nm plus EH.simparam.H_MPC in the second one.
4. Case Study
4.1. Parameters and Modeling
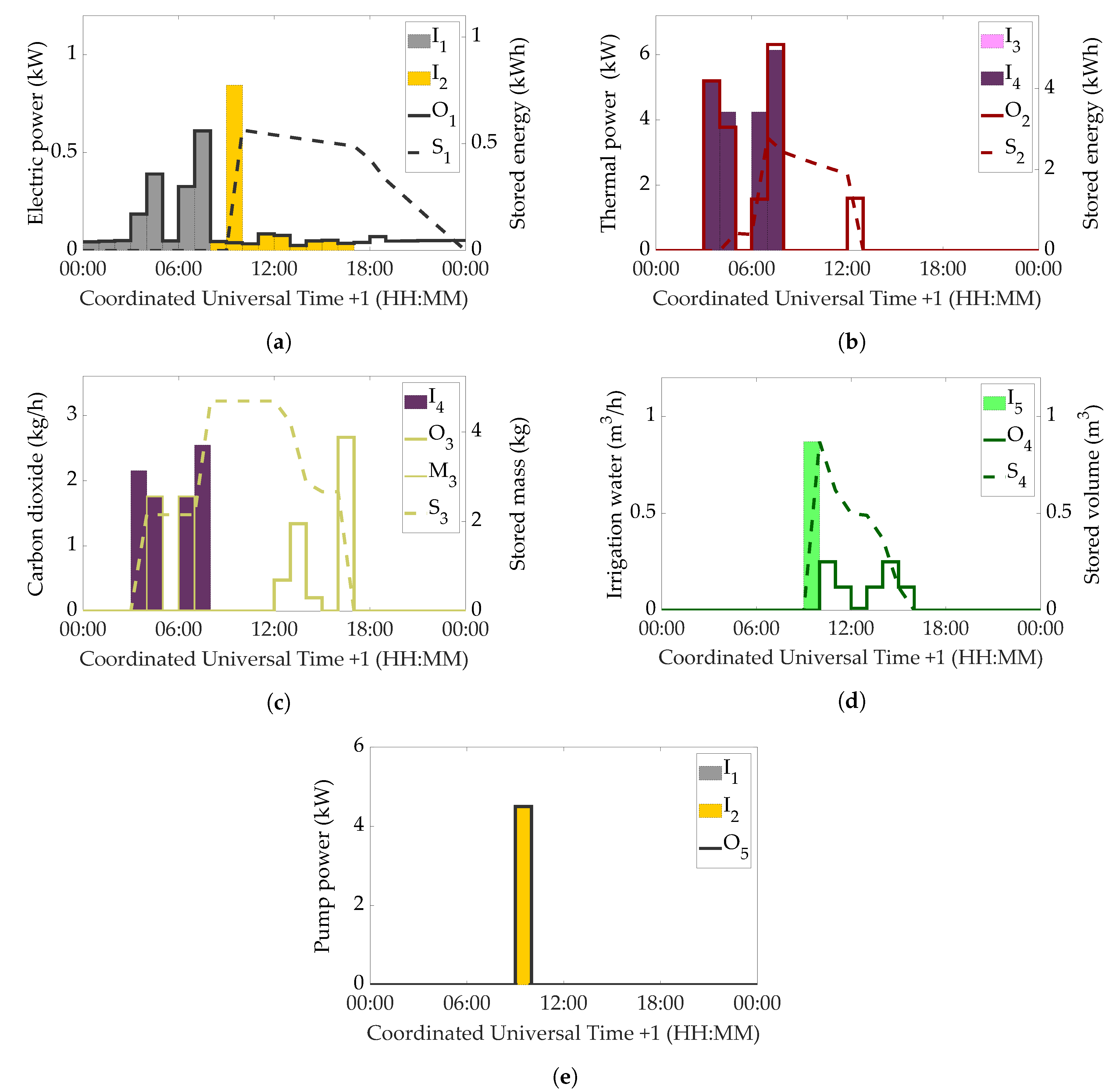
4.2. Simulation Results
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| EH | energy hub |
| MES | multi-energy system |
| MG | microgrid |
| MPC | model predictive control |
| ODEHubs | Optimal Dispatch for Energy Hubs |
| PSO | particle swarm optimization |
| PV | photovoltaic |
| RES | renewable energy sources |
| VPP | virtual power plant |
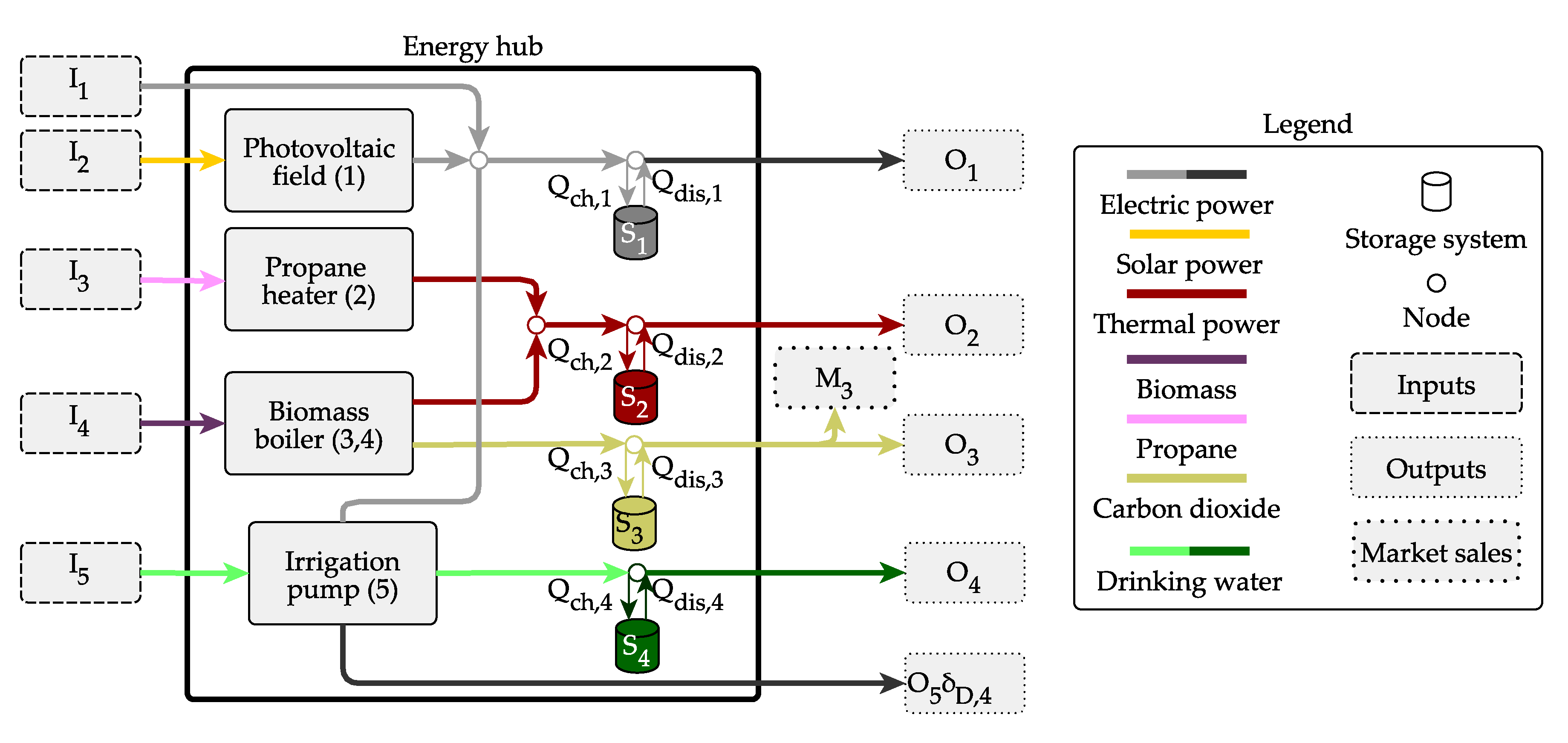
Appendix A. Greenhouse Model in ODEHubs

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Vector P | Path | Vector P | Path |
|---|---|---|---|
| I1→O1 | I1→O5 | ||
| I2→D1→O1 | I2→D1→O5 | ||
| I3→D2→O2 | I4→D3→O2 | ||
| I4→D4→O3 | I5→D5→O4 |
References
- Mohammadi, M.; Noorollahi, Y.; Mohammadi-ivatloo, B.; Yousefi, H. Energy hub: From a model to a concept—A review. Renew. Sustain. Energy Rev. 2017, 80, 1512–1527. [Google Scholar] [CrossRef]
- Ehsan, A.; Yang, Q. Optimal integration and planning of renewable distributed generation in the power distribution networks: A review of analytical techniques. Appl. Energy 2018, 210, 44–59. [Google Scholar] [CrossRef]
- Chicco, G.; Mancarella, P. Distributed multi-generation: A comprehensive view. Renew. Sustain. Energy Rev. 2009, 13, 535–551. [Google Scholar] [CrossRef]
- Geidl, M.; Koeppel, G.; Favre-Perrod, P.; Klöckl, B.; Andersson, G.; Fröhlich, K. Energy hubs for the future. IEEE Power Energy Mag. 2006, 5, 24–30. [Google Scholar] [CrossRef]
- Geidl, M.; Andersson, G. Optimal power flow of multiple energy carriers. IEEE Trans. Power Syst. 2007, 22, 145–155. [Google Scholar] [CrossRef]
- Sadeghi, H.; Rashidinejad, M.; Moeini-Aghtaie, M.; Abdollahi, A. The energy hub: An extensive survey on the state-of-the-art. Appl. Therm. Eng. 2019, 161, 114071. [Google Scholar] [CrossRef]
- Maroufmashat, A.; Taqvi, S.T.; Miragha, A.; Fowler, M.; Elkamel, A. Modeling and optimization of energy hubs: A comprehensive review. Inventions 2019, 4, 50. [Google Scholar] [CrossRef]
- Mancarella, P. MES (multi-energy systems): An overview of concepts and evaluation models. Energy 2014, 65, 1–17. [Google Scholar] [CrossRef]
- Farah, A.; Hassan, H.; Abdelshafy, M.A.; Mohamed, M.A. Optimal scheduling of hybrid multi-carrier system feeding electrical/thermal load based on particle swarm algorithm. Sustainability 2020, 12, 4701. [Google Scholar] [CrossRef]
- Konneh, D.; Howlader, H.; Shigenobu, R.; Senjyu, T.; Chakraborty, S.; Krishna, N. A multi-criteria decision maker for grid-connected hybrid renewable energy systems selection using multi-objective particle swarm optimization. Sustainability 2019, 11, 1188. [Google Scholar] [CrossRef]
- Menezes Morato, M.; da Costa Mendes, P.R.; Normey-Rico, J.E.; Bordons, C. Optimal operation of hybrid power systems including renewable sources in the sugar cane industry. IET Renew. Power Gener. 2017, 11, 1237–1245. [Google Scholar] [CrossRef]
- Galvan, E.; Mandal, P.; Chakraborty, S.; Senjyu, T. Efficient energy-management system using a hybrid transactive-model predictive control mechanism for prosumer-centric networked microgrids. Sustainability 2019, 11, 5436. [Google Scholar] [CrossRef]
- Bordons, C.; Garcia-Torres, F.; Ridao, M.Á. Model predictive control of interconnected microgrids and electric vehicles. Rev. Iberoam. Autom. Inform. Ind. 2020, 17, 239–253. [Google Scholar] [CrossRef]
- Gil, J.D.; Roca, L.; Berenguel, M. Modeling and automatic control in solar membrane distillation: Fundamentals and proposals for its technological development. Rev. Iberoam. Autom. Inform. Ind. 2020, 17, 329–342. [Google Scholar] [CrossRef]
- Nawalany, G.; Sokołowski, P. Improved energy management in an intermittently heated building using a large broiler house in central Europe as an example. Energies 2020, 13, 1371. [Google Scholar] [CrossRef]
- Shen, Y.; Wei, R.; Xu, L. Energy consumption prediction of a greenhouse and optimization of daily average temperature. Energies 2018, 11, 65. [Google Scholar] [CrossRef]
- Van Beveren, P.J.M.; Bontsema, J.; van Straten, G.; van Henten, E.J. Optimal utilization of a boiler, combined heat and power installation, and heat buffers in horticultural greenhouses. Comput. Electron. Agric. 2019, 162, 1035–1048. [Google Scholar] [CrossRef]
- Ouammi, A.; Achour, Y.; Dagdougui, H.; Zejli, D. Optimal operation scheduling for a smart greenhouse integrated microgrid. Energy Sustain. Dev. 2020, 58, 129–137. [Google Scholar] [CrossRef]
- Muñoz, M.; Gil, J.D.; Roca, L.; Rodríguez, F.; Berenguel, M. An IoT architecture for water resource management in agroindustrial environments: A case study in Almería (Spain). Sensors 2020, 20, 596. [Google Scholar] [CrossRef]
- Mérida García, A.; Fernández García, I.; Camacho Poyato, E.; Montesinos Barrios, P.; Rodríguez Díaz, J.A. Coupling irrigation scheduling with solar energy production in a smart irrigation management system. J. Clean. Prod. 2018, 175, 670–682. [Google Scholar] [CrossRef]
- ARM-TEP197. CHROMAE Project (DPI2017-85007-R). 2017. Available online: http://www2.ual.es/chromae/ (accessed on 1 September 2020).
- Web Site of the ARM Group. Automatic Control, Robotics, and Mechatronics (ARM) Research Group (TEP-197). 2020. Available online: https://arm.ual.es/arm-group/ (accessed on 1 August 2020).
- Allegrini, J.; Orehounig, K.; Mavromatidis, G.; Ruesch, F.; Dorer, V.; Evins, R. A review of modeling approaches and tools for the simulation of district-scale energy systems. Renew. Sustain. Energy Rev. 2015, 52, 1391–1404. [Google Scholar] [CrossRef]
- Van Beuzekom, I.; Gibescu, M.; Slootweg, J. A review of multi-energy system planning and optimization tools for sustainable urban development. In Proceedings of the 2015 IEEE Eindhoven PowerTech, Eindhoven, The Netherlands, 29 June–2 July 2015; pp. 1–7. [Google Scholar] [CrossRef]
- Groissböck, M. Are open source energy system optimization tools mature enough for serious use? Renew. Sustain. Energy Rev. 2019, 102, 234–248. [Google Scholar] [CrossRef]
- Ringkjøb, H.K.; Haugan, P.M.; Solbrekke, I.M. A review of modeling tools for energy and electricity systems with large shares of variable renewables. Renew. Sustain. Energy Rev. 2018, 96, 440–459. [Google Scholar] [CrossRef]
- International Business Machines Corporation (IBM). IBM ILOG CPLEX Optimization Studio. 2019. Available online: https://www.ibm.com/es-es/products/ilog-cplex-optimization-studio (accessed on 1 September 2020).
- Bisschop, J.; Meeraus, A. On the development of a general algebraic modeling system in a strategic planning environment. In Applications; Mathematical Programming Studies; Springer: Heidelberg/Berlin, Germany, 1982; Volume 20, pp. 1–29. [Google Scholar]
- Fourer, R.; Gay, D.M.; Kernighan, B. AMPL: A mathematical programming language. In Algorithms and Model Formulations in Mathematical Programming; Wallace, S.W., Ed.; Springer: Berlin/Heidelberg, Germany, 1989; pp. 150–151. [Google Scholar]
- Bisschop, J. AIMMS–Optimization Modeling; Paragon Decision Technology B.V: Haarlem, The Netherlands, 2006. [Google Scholar]
- The MathWorks, Inc. MATLAB R2020a. 2020. Available online: http://es.mathworks.com/products/matlab/ (accessed on 1 August 2020).
- R Core Team. R: A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria, 2013. [Google Scholar]
- Van Rossum, G.; Drake, F.L., Jr. Python Reference Manual; Centrum voor Wiskunde en Informatica: Amsterdam, The Netherlands, 1995. [Google Scholar]
- Bollinger, L.A.; Dorer, V. The Ehub Modeling Tool: A flexible software package for district energy system optimization. Energy Procedia 2017, 122, 541–546. [Google Scholar] [CrossRef]
- Darivianakis, G.; Georghiou, A.; Smith, R.S.; Lygeros, J. EHCM Toolbox. 2015. Available online: https://people.ee.ethz.ch/~building/ehcmToolbox/EHCM_Documentation.pdf (accessed on 1 August 2020).
- Zimmerman, R.D.; Murillo-Sánchez, C.E. Matpower Optimal Scheduling Tool (MOST) User’s Manual, Version 1.0.2. 2019. Available online: https://github.com/MATPOWER/most/blob/master/docs/MOST-manual.pdf (accessed on 1 August 2020).
- Kühne, M.R. Drivers of Energy Storage Demand in the German Power System: An Analysis of the Influence of Methodology and Parameters on Modeling Results. Ph.D. Thesis, Technical University of Munich, Munich, Germany, 2016. [Google Scholar]
- Van den Bergh, K.; Bruninx, K.; Delarue, E.; D’haeseleer, W. LUSYM: A Unit Commitment Model Formulated as a Mixed-Integer Linear Program; KU Leuven Energy Institute, TME Branch Energy Environment: Leuven, Germany, 2014; Volume 7. [Google Scholar]
- Brancucci Martinez-Anido, C. Electricity without Borders—The Need for Cross-Border Transmission Investment in Europe. Ph.D. Thesis, Delft University of Technology, Delft, The Netherlands, 2013. [Google Scholar]
- Long, S. Generalized Modeling Framework for Multi-Energy Systems with Model Predictive Control Applications. Ph.D. Thesis, University of Manchester, Manchester, UK, 2019. [Google Scholar]
- Ramos-Teodoro, J.; Rodríguez, F.; Berenguel, M.; Torres, J.L. Heterogeneous resource management in energy hubs with self-consumption: Contributions and application example. Appl. Energy 2018, 229, 537–550. [Google Scholar] [CrossRef]
- Löfberg, J. YALMIP: A toolbox for modeling and optimization in MATLAB. In Proceedings of the 2004 IEEE International Conference on Robotics and Automation, New Orleans, LA, USA, 2–4 September 2004; pp. 284–289. [Google Scholar] [CrossRef]
- Foundation, C. Cajamar Experimental Station. 2020. Available online: https://www.fundacioncajamar.es/es/comun/estacion-experimental-palmerillas/ (accessed on 1 September 2020).
- Sánchez-Molina, J.A.; Rodríguez, F.; Guzmán, J.L.; Arahal, M.R. Virtual sensors for designing irrigation controllers in greenhouses. Sensors 2012, 12, 15244–15266. [Google Scholar] [CrossRef]
- Sánchez-Molina, J.A.; Reinoso, J.V.; Acién, F.G.; Rodríguez, F.; López, J.C. Development of a biomass-based system for nocturnal temperature and diurnal CO2 concentration control in greenhouses. Biomass Bioenergy 2014, 67, 60–71. [Google Scholar] [CrossRef]
- Ramos-Teodoro, J.; Rodríguez, F.; Berenguel, M. Photovoltaic facilities modeling for an energy hub management with heterogeneous resources. In Proceedings of the XVI CEA Symposium on Control Engineering, Almeria, Spain, 7–9 March 2018; pp. 23–30. (In Spanish). [Google Scholar]
- Ramos-Teodoro, J. Energy Management of a Heterogeneous Production System under the Energy Hub Paradigm. Master’s Thesis, Department of Systems Engineering and Automation, University Carlos III of Madrid, Madrid, Spain, 2017. (In Spanish). [Google Scholar]
- The MathWorks Inc. Documentation: Intlinprog. Available online: https://es.mathworks.com/help/optim/ug/intlinprog.html (accessed on 1 September 2020).
- Evins, R.; Orehounig, K.; Dorer, V.; Carmeliet, J. New formulations of the ‘energy hub’ model to address operational constraints. Energy 2014, 73, 387–398. [Google Scholar] [CrossRef]
- am Ende, D.J.; am Ende, M.T. Chemical Engineering in the Pharmaceutical Industry: Drug Product Design, Development, and Modeling; John Wiley & Sons: Hoboken, NJ, USA, 2019; p. 567. [Google Scholar]
- Aydın, E.; Arkun, Y.; Is, G. Economic model predictive control (EMPC) of an industrial diesel hydroprocessing plant. IFAC-PapersOnLine 2016, 49, 568–573. [Google Scholar] [CrossRef]
- Tran, T.; Ling, K.; Maciejowski, J.M. Economic model predictive control—A review. In Proceedings of the 31st International Symposium on Automation and Robotics in Construction, Sydney, Australia, 9–11 July 2014; Volume 31, p. 1. [Google Scholar]
- Skaf, J.; Boyd, S.P. Design of affine controllers via convex optimization. IEEE Trans. Autom. Control 2010, 55, 2476–2487. [Google Scholar] [CrossRef]
- Long, S.; Marjanovic, O.; Parisio, A. Generalized control-oriented modeling framework for multi-energy systems. Appl. Energy 2019, 235, 320–331. [Google Scholar] [CrossRef]
- Nassourou, M.; Blesa, J.; Puig, V. Optimal energy dispatch in a smart micro-grid system using economic model predictive control. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2020, 234, 96–106. [Google Scholar] [CrossRef]
- Ramos-Teodoro, J.; Rodríguez, F.; Castilla, M.; Berenguel, M. Modeling of production, consumption and storage of heterogeneous resources of a agri-food district with renewable energies. In Proceedings of the X Iberian Congress on Agro-Engineering, Huesca, Spain, 3–6 September 2019; pp. 190–198. (In Spanish) [Google Scholar] [CrossRef]
- Evins, R. Multi-level optimization of building design, energy system sizing and operation. Energy 2015, 90, 1775–1789. [Google Scholar] [CrossRef]
- Montoya, O.D.; Gil-González, W.; Avila-Becerril, S.; Garces, A.; Espinosa-Pérez, G. Distributed energy resources integration in AC grids: A family of passivity-based controllers. Rev. Iberoam. Autom. Inform. 2019, 16, 212–221. (In Spanish) [Google Scholar] [CrossRef]
- Gómez, F.J.; Yebra, L.J.; Giménez, A.; Torres-Moreno, J.L. Modeling of batteries for application in light electric urban vehicles. Rev. Iberoam. Autom. Inform. Ind. 2019, 16, 459–466. (In Spanish) [Google Scholar] [CrossRef]












| 0 kW | ∞ | 0 kW | 0 kW | 0 kW | [46] | 0 kW | ∞ |
| 0 kW | ∞ | 0 kW | 0 kW | 0 kW | 6.8 kg/h | 0 kW | ∞ |
| 0 kg/h | ∞ | 0 kg/h | ∞ | 1 kg/h | 40 kg/h | 0 kW | ∞ |
| 0 kg/h | ∞ | 0 kg/h | 0 kg/h | 1 kg/h | 40 kg/h | 0 kg/h | ∞ |
| 0 m3/h | ∞ | 0 kW | 0 kW | 0 m3/h | ∞ | 0 m3/h | 5 m3/h |
| Coeff. | Value | Coeff. | Value | Coeff. | Value | Coeff. | Value |
| [46] | 0.98 | 0.7 | 0.8 | ||||
| 11.54 | 0.94 | 0.9 | 0.9 | ||||
| 4.25 | 1 | 1 | 1 | ||||
| 1.76 | 1 | 1 | 1 | ||||
| 1 | 1 | 1 | 1 |
| 0 kW | 3 kW | 0 kW | 3 kW | 0 kWh | 11 kWh |
| 0 kW | 104.5 kW | 0 kW | 104.5 kW | 0 kWh | 116.1 kWh |
| 0 kg/h | 51 kg/h | 0 kW | 51 kg/h | 0 kg | 25.2 kg |
| 0 m3/h | 3 m3/h | 0 m3/h | 3 m3/h | 0 m3 | 6 m3 |
| 0 kW | 0 kW | 0 kW | 0 kW | 0 kWh | 0 kWh |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ramos-Teodoro, J.; Giménez-Miralles, A.; Rodríguez, F.; Berenguel, M. A Flexible Tool for Modeling and Optimal Dispatch of Resources in Agri-Energy Hubs. Sustainability 2020, 12, 8820. https://doi.org/10.3390/su12218820
Ramos-Teodoro J, Giménez-Miralles A, Rodríguez F, Berenguel M. A Flexible Tool for Modeling and Optimal Dispatch of Resources in Agri-Energy Hubs. Sustainability. 2020; 12(21):8820. https://doi.org/10.3390/su12218820
Chicago/Turabian StyleRamos-Teodoro, Jerónimo, Adrián Giménez-Miralles, Francisco Rodríguez, and Manuel Berenguel. 2020. "A Flexible Tool for Modeling and Optimal Dispatch of Resources in Agri-Energy Hubs" Sustainability 12, no. 21: 8820. https://doi.org/10.3390/su12218820
APA StyleRamos-Teodoro, J., Giménez-Miralles, A., Rodríguez, F., & Berenguel, M. (2020). A Flexible Tool for Modeling and Optimal Dispatch of Resources in Agri-Energy Hubs. Sustainability, 12(21), 8820. https://doi.org/10.3390/su12218820