1. Introduction
It is reported that millions of people lost their lives from roadway crashes on the freeway around the word, and the number of casualties is still increasing steadily in recent years [
1]. The driver factors, such as mal-operation and fatigue driving, have been considered as the leading cause of most crashes [
2]. To handle this issue, implementing intelligent transportation system (ITS) applications is recognized as a promising means to improve traffic safety [
3]. The 5th generation (5G) mobile network services, an emerging technology, soon to be under large-scale promotion, is believed to have great potential to improve the ITS, especially on autonomous vehicle technologies. In general, it is well-known that 5G networks are characterized by three unique features: (1) ubiquitous connectivity, (2) extremely low latency, and (3) very high-speed data transfer rate (typically of Gbps order) [
4,
5]. Compared with the current.
Long therm evolution(LTE)networks, the 5G networks will significantly improve users’ perceived quality of service (QoS). The 5G wireless communication systems, with improved data rates, capacity, latency, and QoS, are expected to be the panacea to the most existing problem of information transfer in the intelligent transportation systems. The 5G networks are expected to serve the advancement and implementation of self-driving technologies.
Connected and automated vehicles (CAV) is one of the most recent developments of information technology; the emerging communication technologies can significantly improve the safety and efficiency of the transportation road network as well. The main factors that affect CAVs’ longitudinal safety include vehicle dynamics [
6], the intervehicle spacing policy [
7], information flow topology [
8], and the quality of intervehicle sensing and communication [
6,
9]. In particular, communication delay, which inherently exists in vehicle-to-vehicle (V2V) and the vehicle-to-infrastructure (V2I) communications, can significantly compromise longitudinal safety [
9], that is, since the CAV vehicle functionality relies to a large extent on vehicle information transmitted by wireless communication, e.g., the position, velocity, actual, and desired accelerations.
Generally, in communications, connected vehicle technologies can be classified into two categories: V2V communications and the V2I communications. To date, both the V2V and V2I were mostly based on the dedicated short-range communication (DSRC) system. With the 5G era arriving, the V2V and I2V communication systems also could be based on the public 5G mobile network. Under reliable connective communication circumstances, each connected self-driving vehicle can receive real-time dynamic driving status information from other connected vehicles, including position, speed, and acceleration, without the need to construct extra dedicated roadside communication infrastructure. Along with the automatic driving technologies updating, traffic safety and efficiency are expected to improve significantly in the transportation road network, especially on the freeways, there are many traffic accidents, such as rear-end collisions.
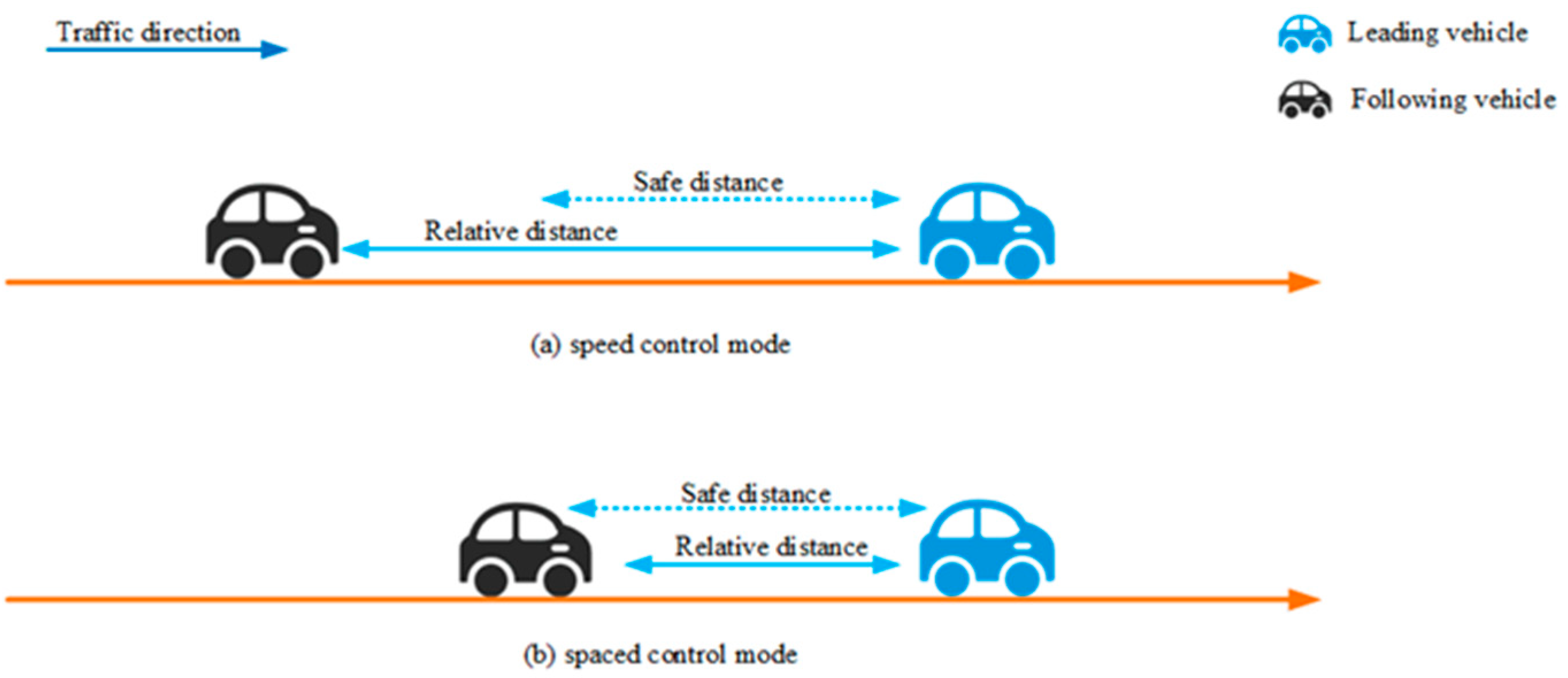
Adaptive cruise control (ACC), as one of the earliest automobile autonomous control systems, has been widely studied and was designed in the last few decades. As illustrated in
Figure 1, ACC vehicles are without communication devices, instead mostly only equipped with sensors, such as radar or lidar, to sense the status of adjacent vehicles. The vehicle-mounted sensors can measure the distance to the preceding vehicle (lead car) and the relative velocity of each vehicle in the same lane. Generally, the ACC system can operate in two modes: one is the speed control mode, which is shown in
Figure 1a, and the other is the spacing control mode, which is shown in
Figure 1b. When the relative distance between the subject vehicle and the preceding car is bigger than the safe distance, the following vehicles travel at the driver-set speed. If the spatial gap between the subject vehicle and the preceding one becomes narrower than the safe distance, then the subject vehicle will transfer to the space control mode smoothly, which is dedicated to maintaining a safe distance from the preceding vehicle. The ACC controller is most widely known for its liner feedback control strategy, where acceleration is proportional to the deviation from target spacing and the relative speed with the preceding vehicle. According to different target spacing, the linear feedback control strategy can be further divided into two categorie: the, constant time headway (CTH) policy [
10] and the constant spacing (CS) policy [
11].
The rapid development of communication technologies, especially short-range communication technology, has been widely integrated into ACC systems. The evolved version of ACC incorporated short-range communication technologies, such as DSRC into the ACC systems to enable cooperative sensing and information exchange. By adding the vehicle-to-vehicle (V2V) or the vehicle-infrastructure (V2I) wireless communication components, the strengthened ACC systems can gain enhanced performance, leading to a cooperative ACC (CACC) system. Therefore, the CACC system is an extension of the ACC system, with timely information transferred between the controlled vehicles which can minimize the speed differences among the vehicles in a platoon and maintain stable and safe headways between adjacent vehicles on the freeway [
12]. All in all, the CACC system is a more sophisticated variant of ACC, and it is going to be commercially available in the near future [
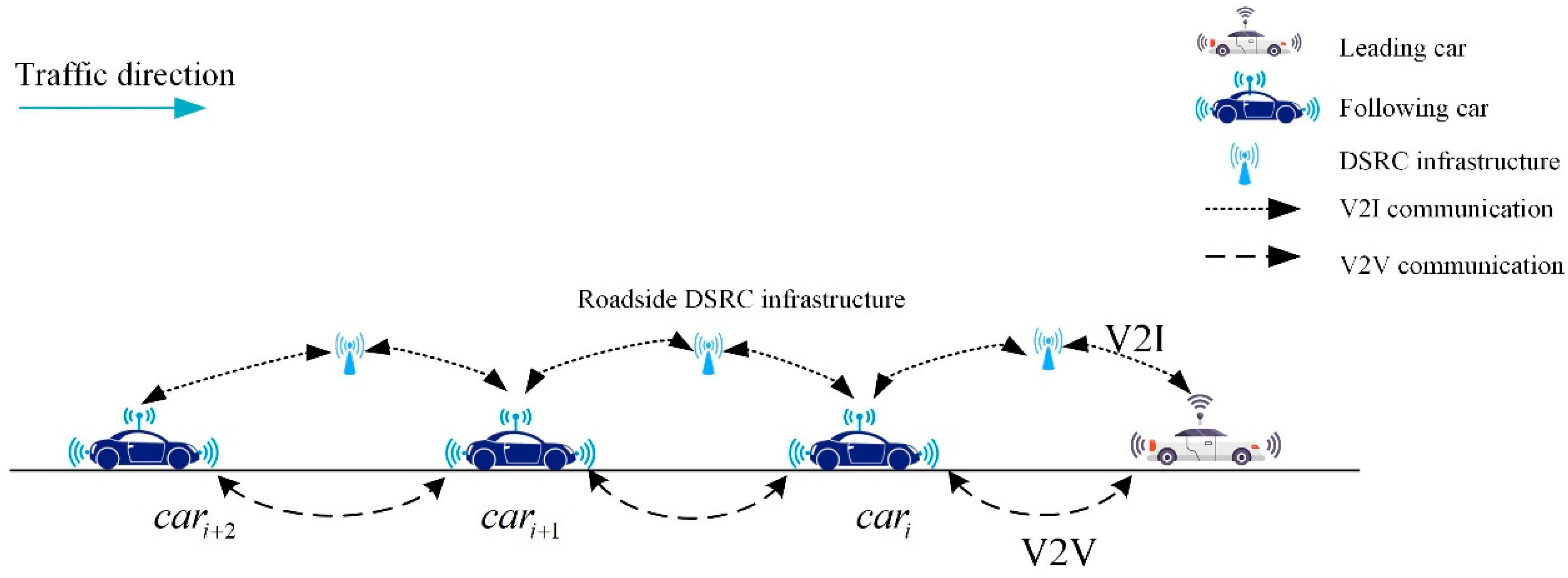
5]. CACC is one of the typical intelligent vehicle longitudinal control strategies which is particularly promising due to its potential to drastically improve the traffic safety level and stability on the freeway. As illustrated in
Figure 2, in the previous DSRC-CACC system, the vehicles under a CACC platoon typically were communicated by the dedicated short-range communication (DSRC) system, due to the current 4G LTE networks not being reliable enough to meet the moving vehicles’ control requirement. Recently, authors in reference [
13] proposed a hybrid IEEE 802.11p–LTE HetNet architecture, which integrated the DSRC and the LTE networks. However, the communication component of the conventional CACC systems typically relied on the dedicated roadside communication infrastructure. Therefore, the CACC vehicles can mostly only function well under the roadside communication infrastructure in well-built circumstances [
13]. Due to the rigid external circumstance limitation, the extensive implementation of the connected CACC vehicles remains sluggish.
The rest of the paper is organized as follows.
Section 2 is a review of related works. Then, an overview of cruise control algorithms is introduced in
Section 3. In this section, the typical ACC and CACC models proposed by the California Partners for Advanced Transit and Highways(PATH) are introduced. Then, a modified CACC algorithm accounting for time delay and is introduced in
Section 4. Several simulation experiments to validate the proposed CACC models are included in
Section 5; the sensitivity analysis is provided in this section as well. Finally, this paper ends with a brief conclusion and recommendation in
Section 6.
2. A Review of Related Work
Though various wireless communication systems exist, V2V and V2I communication are mostly provided by DSRC, based on the Electrical and Electronics Engineers 802.11p (IEEE 802.11p) vehicular communications standards and the Long Term Evolution (4G LTE) by 3rd Generation Partnership Project (3GPP) for vehicular networking standards. In the last 5 years, Mir and Filali [
14] compared the two most viable communication standards, IEEE 802.11p (DSRC) and LTE (4G), for vehicular networking. The results indicated that both IEEE 802.11p and LTE vehicular networking applications are time-critical, and the advantages of DSRC are easy deployment, low cost, and the capability to support V2V communications. Nonetheless, this technology suffers from scalability issues, unbounded delays, and the lack of deterministic quality of service (QoS) guarantees. On the other hand, literature [
15] performed some experiments to evaluate the performance of IEEE 802.11p vehicular communications, while transmitting basic safety messages (BSM). A total of nine experiments were conducted for measuring the latency values while transmitting BSM packets over the IEEE 802.11p radio channel. Their results denoted that the average latency increases with an average distance between the communicating vehicles.
The authors of [
16] studied the IEEE 802.11p-based cooperative driving systems in urban expressways. Their measurements and analyses indicated that setting roadside relay communication stations at the top of the road slopes can effectively reduce Non-Line-of-Sight (NLoS) cases and improve the communication reliability. To provide effective group communication between vehicular ad hoc networks (VANETs), Charitos and Kalivas (2017) [
17] proposed the hybrid IEEE 802.11p-LTE network architecture. In the references [
18,
19], various scenarios for cellular network and vehicular communication were presented, and the authors analyzed the performance of the hybrid communication system, which combined the LTE and the IEEE 802.11p. The results showed that in terms of IEEE 802.11p, the values of communication latency were somewhat higher: approximately between (450–800 ms), compared to the LTE (180–300 ms). With the combination of IEEE 802.11p–LTE, the average delay can be significantly decreased to (110–150 ms).
In 2020, the first commercial release of the fifth-generation cellular system (5G) was launched according to the road map of the 3rd Generation Partnership Project (3GPP) and the International Telecommunication Union (ITU) road map for the International Mobile Telecommunications 2020 system (IMT-2020) [
20,
21]. In the 5G era, the extreme latency, high-speed data transfer, and ubiquitous connectivity will be the salient features of 5G networks, which are expected to bring significant positive effects to self-driving development, especially the CACC system [
4,
5,
22]. In the literature of Sachs and Andersson et al. (2019), the 5G functionality for ultra-reliable and low-latency communication (URLLC) services is detailed described [
23]. It also explained how 5G new radio (NR) and the evolved long-term evolution (LTE) radio interface can achieve guaranteed low-latency wireless transmission. For intelligent transportation systems (ITSs) with URLLC services, it can promote real-time maneuver coordination among autonomous vehicles, and coordination with the transportation infrastructure become reality. According to the requirement of ITU and 3GPP, 5G needs to be able to successfully transmit a 32-B message over the 5G radio interface within 1 ms. Furthermore, the 3GPP further requires that the average latency of 5G radio interface to be decreased to 0.5 ms, which is not required for the 5G evaluation at ITU [
24].
In the majority of CACC systems, the vehicles in the platoon are required to communicate with the nearest preceding vehicle and the leading vehicle [
3]. In order to standardize the vehicular communication system, which is a crucial functional block in the CACC systems, the Connected Vehicle Reference Implementation Architecture (CVRIA) is proposed by the US Department of Transportation. The CVRIA provides the communication framework between vehicles and roadside units, including V2V and V2I [
25]. Under the 3G or 4G era, when the number of served vehicles increases inside the coverage area, the communication bandwidth would become insufficient; therefore, short-range wireless technologies are necessary supplements for vehicular communication. DSRC has been chosen as the standard short-range communication protocol for connected vehicle applications by the Federal Communications Commission (FCC) in the US [
26]. Another form of vehicular network is VANETs, with various features, such as high node mobility and dynamic topology [
27], which is one of the extensively explored methods for vehicular communication. In [
27], the authors discussed the research challenges of routing in VANETs and then analyzed the future trends of VANETs.
According to the literature reviewed, in the previous research, various CACC models were explored and studied in simulation experiments and field tests. However, most of the CACC systems are based on the DSRC system, LTE communication system, or the hybrid network of DSRC and LTE systems. The recent progress in 5th generation wireless systems (5G) shows that the millimeter-wave 5G has an excellent capability of decreasing communication latency. To date, there have been few studies which investigated the potential influences of the next-generation communication technologies on the CACC system, especially the longitudinal safety impacts of CACC fleets. To fulfill this research gap, this paper is focused on quantitatively evaluating the rear-end collision risks of the CACC platoons, which rely on different communication systems. This study also aimed to reduce the rear-end collision risks on the freeway by modifying the typical CACC algorithm. The modified CACC algorithm, which is derived from the California Partners or Advanced Transit and Highways (PATH) [
28,
29], was introduced in this paper. Moreover, to quantitatively evaluate the rear-end collision risks in a CACC fleet, two surrogate safety measures were also applied in this research. To the best of our knowledge, research devoted to the influence of communication delay on the CACC system longitudinal safety has rarely been reported in the literature before.
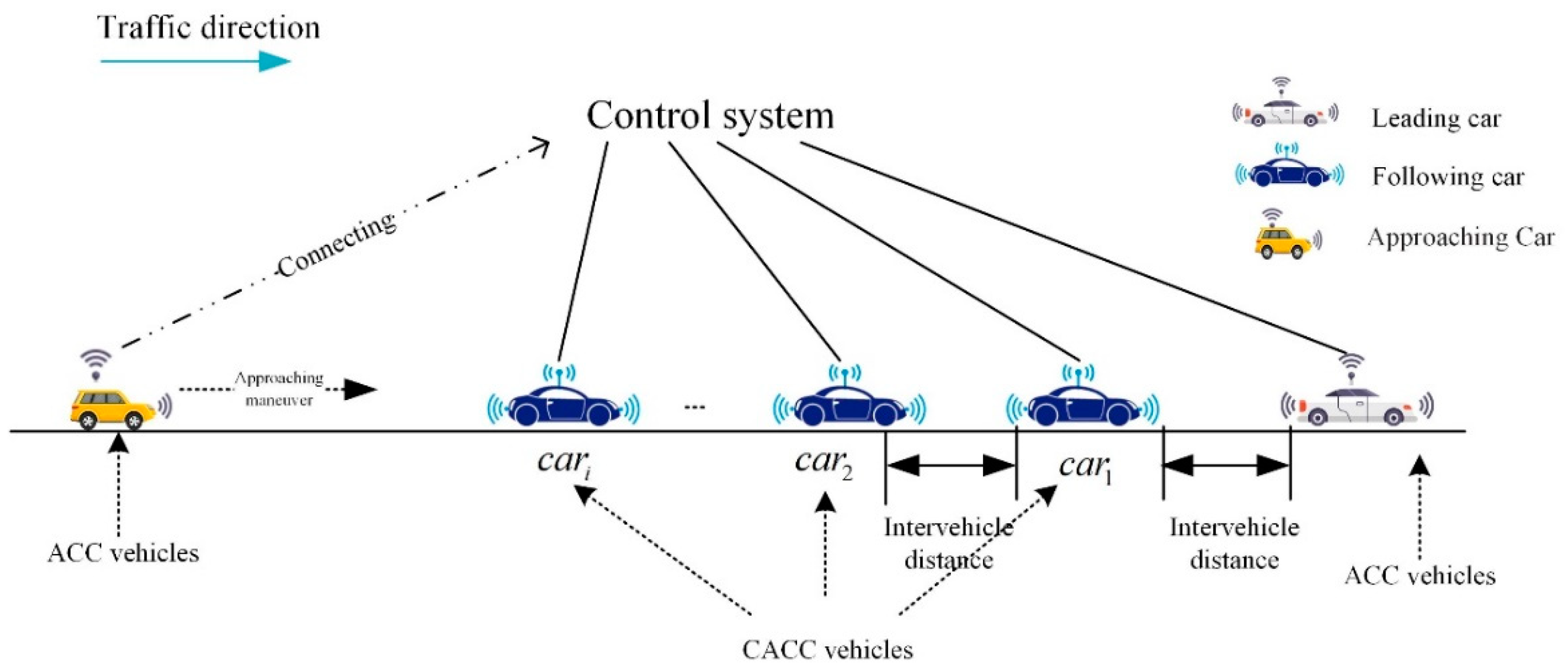
To overcome the communication delay existing in V2V and V2I communication, this paper proposed a novel network topology structure.
Figure 3 illustrates the way that CACC vehicles under the 5G communication system are connected. Compared with the conventional cooperative adaptive cruise control system, vehicles equipped with the 5G communication devices can exchange real-time driving information not only via the dedicated short distance vehicular communication system, but also the widely existing 5G network signal. This provides a new way for the development of connected autonomous vehicles (CAVs), which can enhance their situational awareness and performance through the implementation of more robust system-level vehicle control strategies [
30]. When the highly reliable 5G network circumstance is widely constructed, cooperative ACC platoon driving will become a particularly promising technology to improve road safety, fuel consumption, and traffic throughput without the need to expand the current roadside infrastructure [
5].
5. Simulation Experiments and Results Discussion
To date, as the application of the 5G-mCACC system in practice is rare, it is impractical to quantify the safety performance of the 5G-mCACC system in large scale real-world filed tests. Therefore, simulation experiments are needed to evaluate the proposed modified 5G-CACC system. In this paper, the microscopic simulation testbed was designed and implemented, which was constructed with MATLAB R2018b software. The modified longitudinal control algorithms and surrogate safety measures were used in this section, which are implemented in the simulation testbed to quantify and analyze the impacts of the communication latency to the CACC systems.
5.1. Designed Experiment and Tested Scenarios
The overarching goal of this study is to investigate the longitudinal safety performance of the proposed novel 5G-mCACC system and demonstrate its technical feasibility. To compare the difference between the newly proposed 5G-mCACC system and the previous CACC system, which relied on the traditional communication infrastructures, such as the DSRC communication system, 4G LTE networks, and DSRC–LTE hybrid networks, the comparison experiments were designed and tested in this paper.
As mentioned earlier in this paper, the previous research results verified that the time delay of the DSRC system is approximately between 250–600 ms [
13], and the time delay of the LTE is about 180–300 ms [
14], while the average time delay of the hybrid DSRC–LTE network is significantly decreased to 110–150 ms [
17,
18]. In the subsequent sensitivity analysis comparative experiment, the communication time delay of the CACC system is set as 100 ms, 200 ms, and 300 ms, which represent the time delay caused by the hybrid network, the LTE communication system, and the DSRC system, respectively.
In realistic traffic scenarios, traffic oscillation is a very common phenomenon, which is a kind of traffic disturbance propagation caused by when the leading vehicle stops or accelerates suddenly. If the distance between the preceding vehicle and the following vehicle is insufficient, and the following vehicle does not decelerate in time, a rear-end collision accident may occur. This kind of longitudinal microscopic behavior of the automatically controlled vehicles is simulated in the constructed MATLAB simulation platform.
5.2. Performance of the PATH-ACC System
Firstly, the microscopic behaviors of the PATH-ACC system are simulated in the experiment, which is used as a comparison test of the subsequent CACC experiment. As illustrated in
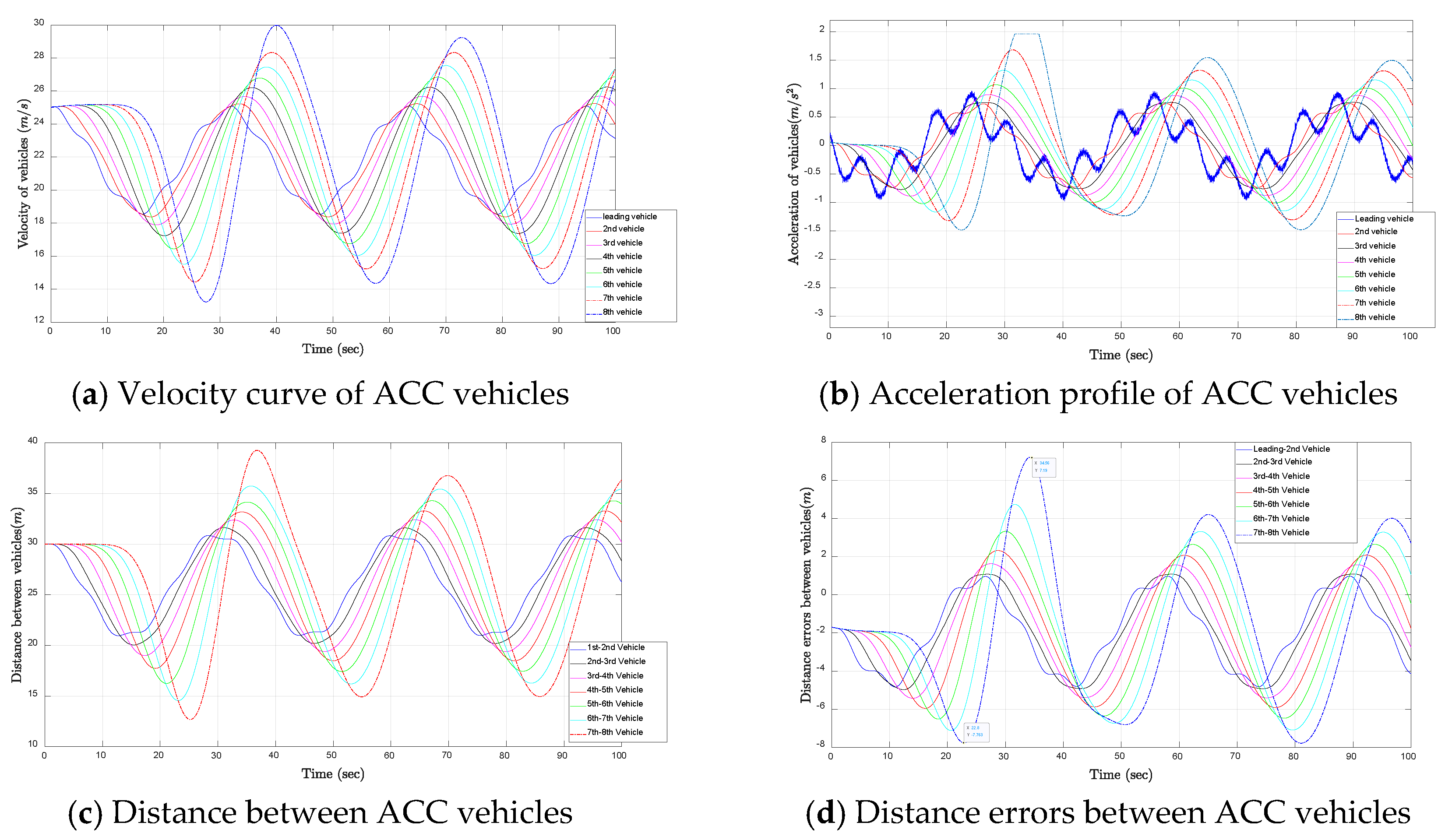
Figure 5, an ACC platoon constructed with eight ACC vehicles is simulated in this section, and the simulation period is set as 100 s.
As is shown above,
Figure 5 illustrates the velocity, acceleration, spacing gap, and distance error curve of the PATH-ACC vehicles under the designed simulation test scenario.
Figure 5 indicates that all the vehicles in the platoon start with an initial velocity of 25 m/s. As shown in
Figure 5b, considering driving comfort, the acceleration of the leading vehicle always ranges within −0.3 g (−2.943
) and 0.2 g (1.962
), which corresponds to the requirements of the ISO 15,622 intelligent transport systems standard [
47].
Figure 5c is the real-time intervehicle spacing gap response graph of the ACC platoon. This picture also indicates that the initial position of each vehicle is set as 30 m apart, which is a little wider than the desired distance gap. Furthermore, to directly reflect the real-time safety situation of every ACC vehicle during the simulation, the distance error convergence curve graph is shown in
Figure 5d. The spacing errors are the deviations between the real-time relative distance and the desired safety distance.
Observing
Figure 5a, it is not difficult to find out that the velocity shockwave is gradually amplified in the ACC platoons. Similar amplified phenomena also can be found in
Figure 5c,d, which indicates that if the disturbance affected the leading vehicle’s behavior cannot be attenuated in time, the distance gap and spacing error between the ACC platoons will be continuously amplified. If the number of vehicles in the ACC platoons continuously increases, then the speed shockwave and the spacing error will be magnified infinitely in the following vehicle. Consequently, this may seriously compromise the platoon vehicle’s longitudinal safety. Furthermore, the spacing error fluctuating range is also reflected in
Figure 5d, which clearly illustrates that the spacing error of the ACC platoons ranges from −7.7
to +7.2
in the most of the simulation period. Finally, from the acceleration response curve
Figure 5b, we can see that, in the ACC platoon, only the second vehicle can feel the acceleration oscillation of the leading vehicle, which means that information dissemination lags in the ACC platoon.
5.3. Performance of the Modified CACC System
In order to compare the safety performance of the modified CACC system with the typical ACC system, in the following comparative experiment, most of the experimental conditions remained unchanged. The only difference between these two experiments is the control algorithm, which is chosen as the unique controlled variable. In addition, the headway time constant of the CACC fleet is set as 0.9 s, and the communication time delay is 0.02 s, which is used to simulate the 5G communication latency. Under the designed tested scenario, the velocity, spacing gap, distance error, and real-time acceleration of the CACC vehicles are recorded as well. The specific performance of the modified 5G-CACC vehicles is shown in
Figure 6.
Figure 6 displays the performances of vehicles controlled by the 5G-mCACC system.
Figure 6a–d represent the velocity, acceleration, intervehicle distance, and space error convergence profile of the fleet in the designed test scenario. From
Figure 6a,c, we can see that, in the 5G-CACC vehicle platoon, the fluctuations of speed and intervehicle distance are mitigated instead of being amplified, which is significantly different from the previous ACC experiment results. Furthermore, the distance error convergence curve
Figure 6d demonstrated that the spacing error of the modified CACC vehicle platoon converges to
, which is significantly smaller than the previous experiment. Furthermore, from
Figure 6b, we can see that the leading vehicle’s abnormal acceleration oscillation attenuated rapidly in this CACC platoon, and at least three following vehicles can respond to the leading vehicles’ acceleration oscillation.
From the above two comparison experiments, one can conclude that the modified CACC system, integrated with 5G communication technology, significantly enhanced the ability to sense upstream traffic condition changes. Compared with the ACC platoons, another significant improvement of the 5G-mCACC system is that the inter-vehicle spacing error fluctuation amplitude reduced about 96.6%. Due to the improvement of the aforementioned two aspects, the string stability of CACC platoons improved consequently. Furthermore, the intervehicle spacing error directly relates to vehicles’ longitudinal safety performance. Therefore, reasonable speculation can be made that the longitudinal safety performance of the modified CACC vehicles is enhanced as well. Furthermore, we can speculate that CACC vehicles’ longitudinal safety improvement is related to the extremely low communication latency of 5G. To demonstrate the rationality of this hypothesis, some sensitivity analysis experiments are conducted in the next section.
5.4. Sensitivity Analyses
The headway time not only has great effects on traffic efficiency, but also influences the longitudinal safety of CACC vehicles. In the sensitivity analysis experiments, the headway time constant is considered as a key parameter to affect the longitudinal safety of the various CACC platoons. Hence, four values of the headway time gap, including 1.2 s, 1.0 s, 0.8 s, and 0.6 s, are selected as the comparative variables in the sensitivity analysis experiments. In order to quantitatively analyze the rear-end collision risk of in various CACC system, the TIT and TET change percentages are calculated as the evaluation indicator. The specific results are shown in
Table 3.
To investigate the longitudinal safety impacts of the communication time delay to the CACC vehicle, CACC systems based on various communication systems were simulated in the sensitivity analysis experiments. According to the previous research literature, four representative vehicular communication ways were analyzed in this section. The time delays 300 ms, 200 ms, 100 ms, and 20 ms correspond to the latency of DSRC, LTE-4G, Hybrid network, and the 5G network, respectively. Besides, the ACC platoon without wireless communication was used as a benchmark for comparing the performances of various CACC systems.
The sensitivity analysis results are shown in
Table 3 and
Figure 7. From these results, we can see that when the headway time gap is over 1 s, the various CACC controllers all performed excellently without significant difference, especially the hybrid LTE-DSRC CACC and the 5G-CACC, both of which can almost 100% eliminate the rear-end collision risks in the tested experimental scenarios. This indicates that the larger the headway time gap constant, the weaker the communication latency influence on CACC vehicles’ longitudinal safety performance.
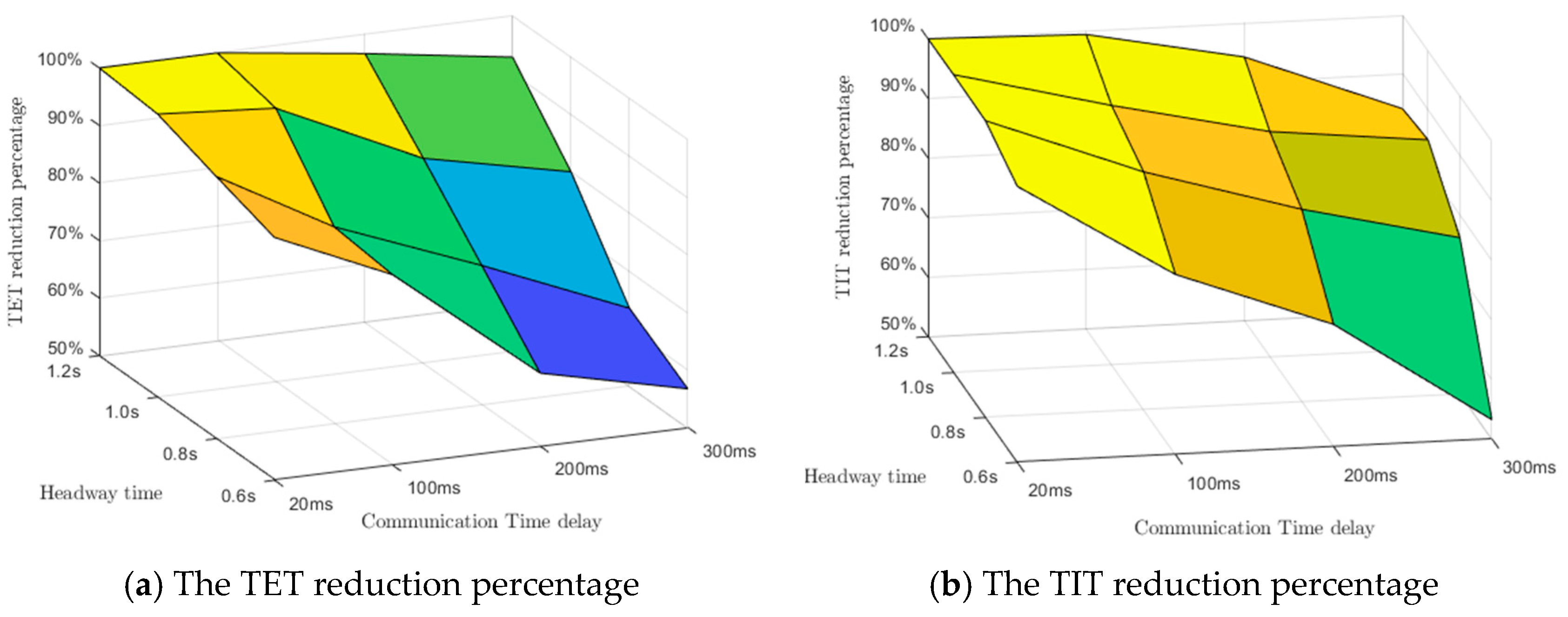
With the time gap decreasing, the influence of communication latency becomes gradually more significant. As illustrated in
Figure 7, when the headway time constant decreased to 0.8 s, the TET and TIT reduction percentage of the DSRC-CACC and LTE-CACC systems decreased more significantly than the 5G-CACC system. Specifically, as the
Figure 7a displays, compared with the ACC system, when the headway time gap decreased to 0.8 s, the 5G-CACC can still reduce about 96% of rear-end collision risks, while the hybrid LTE-DSRC CACC, the LTE-CACC, and the pure DSRC-CACC system can only reduce about 85%, 74%, and 60% rear-end collision risks, respectively. This demonstrates that the extremely low latency, as one of the unique characteristics of the 5G communication system, shows significant advantages in reducing the rear-end collision risks of the CACC platoon. The sensitivity analysis results also suggested that, compared with the sensor-based ACC system, the CACC system based on various wireless communication showed its advantage in enhancing the longitudinal vehicle safety, which is consistent with the previous major study.
From the sensitivity analysis results, we can also conclude that the CACC vehicle based on different wireless communication has different minimal headway time gaps. The CACC system relies on dedicated short-range communications (DSRC) and the long term evolution (LTE) can just function well when the desired headway time is over 1.0 s. Even the hybrid-network can just work well when the headway time is no less than 0.8 s. It is proved that the modified CACC control algorithm with the support of 5G wireless communication can narrow the desired minimal headway time to 0.6 s without significantly increasing the longitudinal rear-end collision risk. The sensitivity analysis results suggest that communication delay is crucial for the CACC platoon performance. This supports the hypothesis that the 5G-CACC system with extremely low communication latency has significant advantages for improving traffic efficiency and reducing rear-end collision risks.
6. Conclusions and Recommendations
This article mainly aimed to investigate the longitudinal safety impacts of the communication time delay on CACC platoons. The safety impacts were measured by the surrogate safety measures of the TIT and TET indicators. A modified CACC vehicle control algorithm accounting for communication latency is proposed in this paper. To verify the feasibility of the proposed control algorithm, we compared the performance of the PATH ACC algorithm and the modified CACC by the simulation experiments. The obtained comparative experimental results reveal that the modified CACC control algorithm can not only dramatically reduce the inter-vehicle spacing error in the platoon, but also enhance the string stability of the CACC vehicle.
Furthermore, to quantitatively evaluate the longitudinal safety impacts of communication latency to the modified CACC system, the CACC platoon constructed, based on DSRC, LTE, and the hybrid DSRC-LTE, were investigated, respectively, in the sensitivity analysis experiments. The sensitivity analysis results suggest that the performance of the platoon is strictly related to the applied wireless communication style. Compared with other kinds of communication systems, the experimental results suggest that the new 5G-CACC system with extremely low communication latency has significant advantages in reducing the rear-end crash risks, especially when the headway time of the CACC platoon decreased to 0.6 s. With the commercial application of the 5G communication network, the unique features of 5G, such as the extremely low latency and ubiquitous connectivity, bring opportunities for the development of the CACC system. It is expected that road safety and traffic efficiency can be enhanced with the combination of different communication technologies in the future.
In this research, only the longitudinal safety impacts, the rear-end collision risks of the CACC platoon, were analysed. In fact, the application of new vehicular communication technologies may also benefit the cooperation of lane change behavior of vehicles on a freeway. Cooperative lane change is another challenging research field. On the other hand, another feature of CACC not considered in this research is CACC longitudinal stability, which is always a key area of CACC research. Furthermore, vehicle-to-vehicle communications can be affected by many external conditions, such as the weather and driver factors, which can significantly impact the results as well. The authors recommend that further research focuses on these issues.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}