Interpretation of the Magnetic Field Signals Emitted by Encoded Asphalt Pavement Materials

 ,
,  and
and 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
2.1. Materials
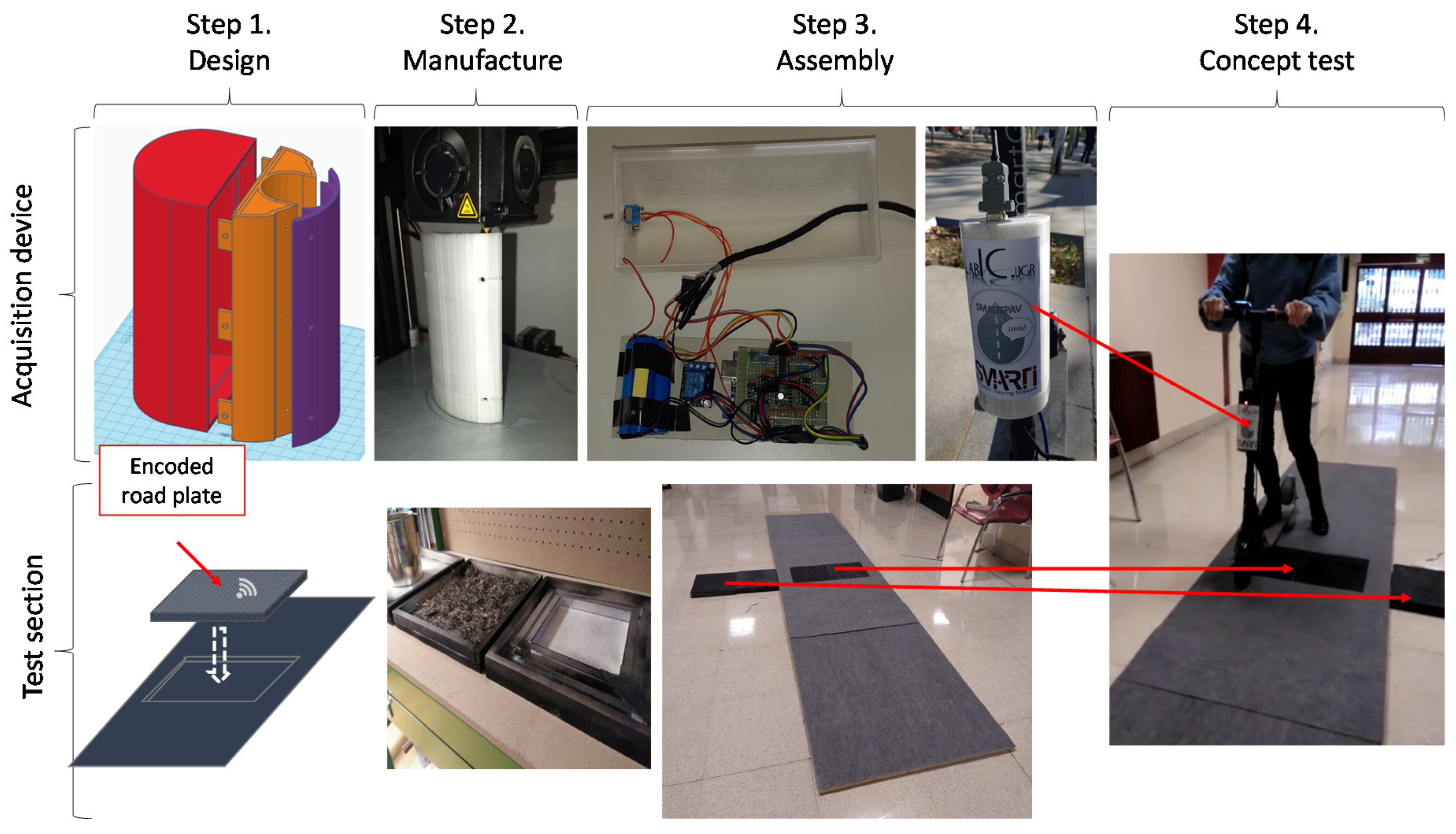
- Firstly, to create elements with a high concentration of steel fibers, which is required for magnetic field detection.
- Secondly, the fabrication of practical elements, which can be easily placed inside the surface course of existing pavements with minimal processing.
- Thirdly, the reduction in fiber grouping during mixing. This was achieved by preheating the fibers and incorporating them after the aggregates but before the asphalt binder in the mixing process. A discontinuous granulometry was used for the asphalt mixture, with fine aggregates (maximum size of 6 mm) and a rich content of asphalt binder (8%).
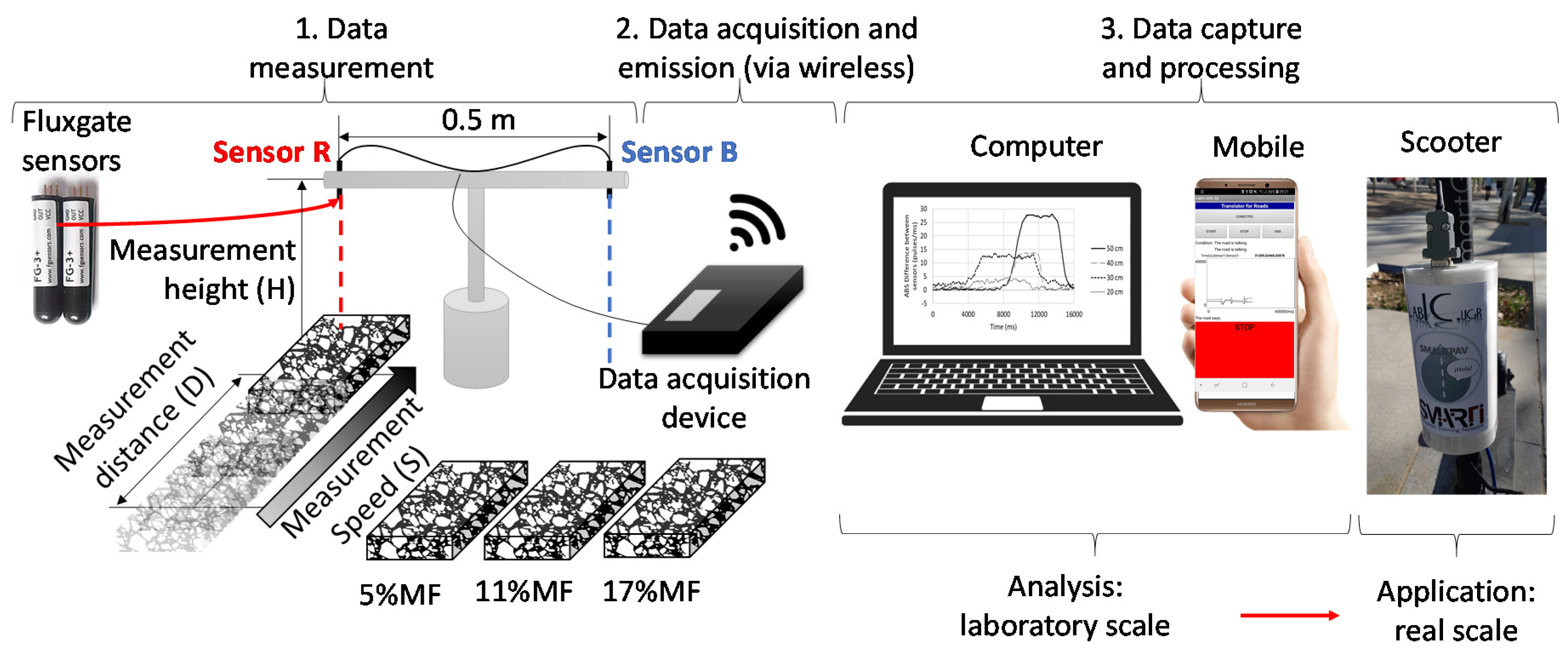
2.2. Methods
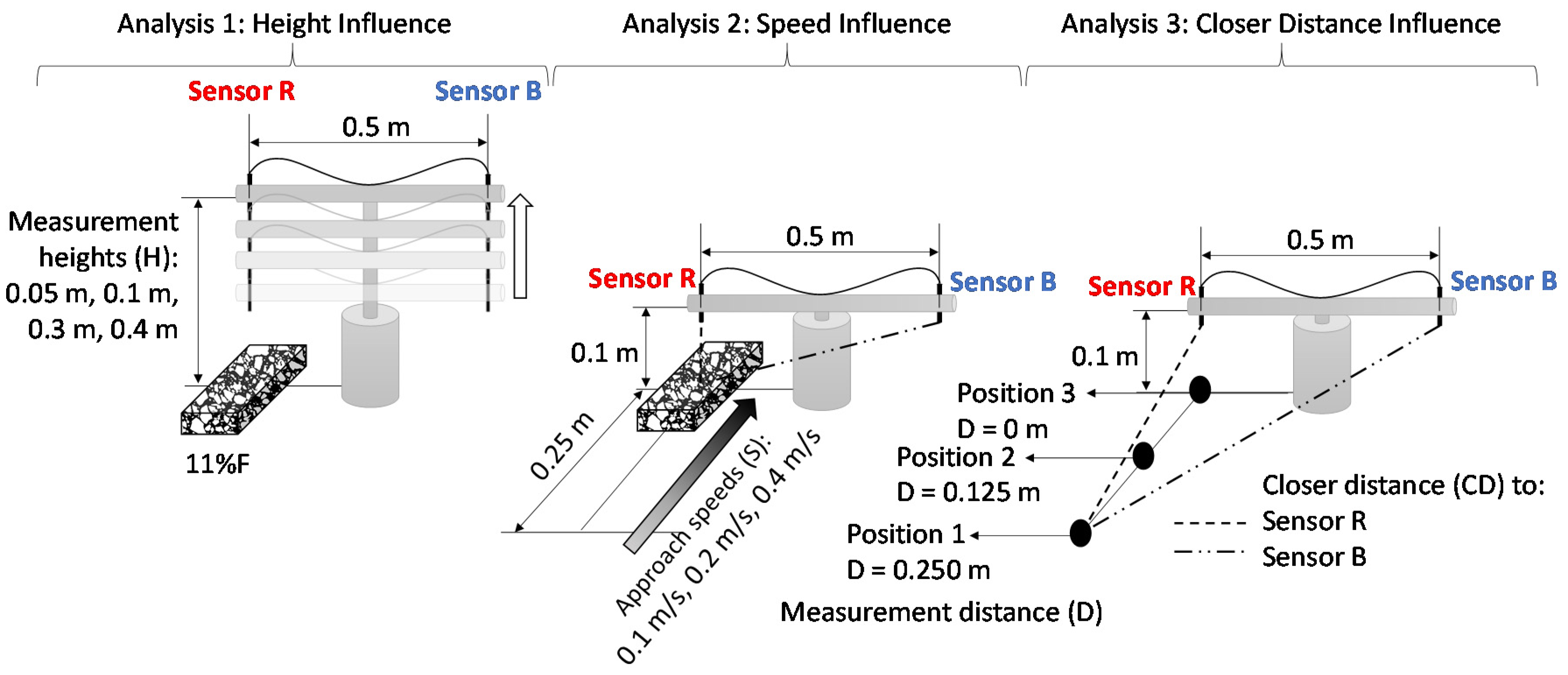
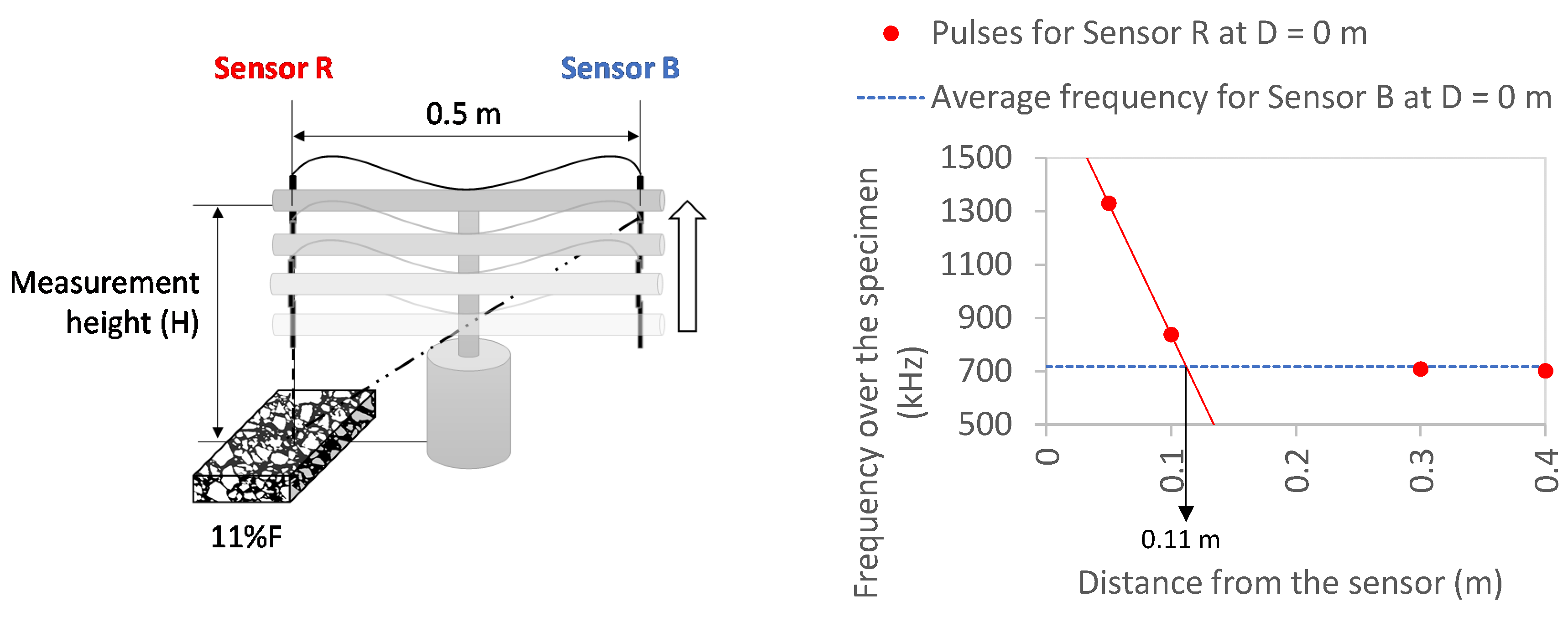
- Analysis 1. Height influence: variation of the magnetic field strength depending on the height (H = 0.05 m, 0.1 m, 0.3 m and 0.4 m).
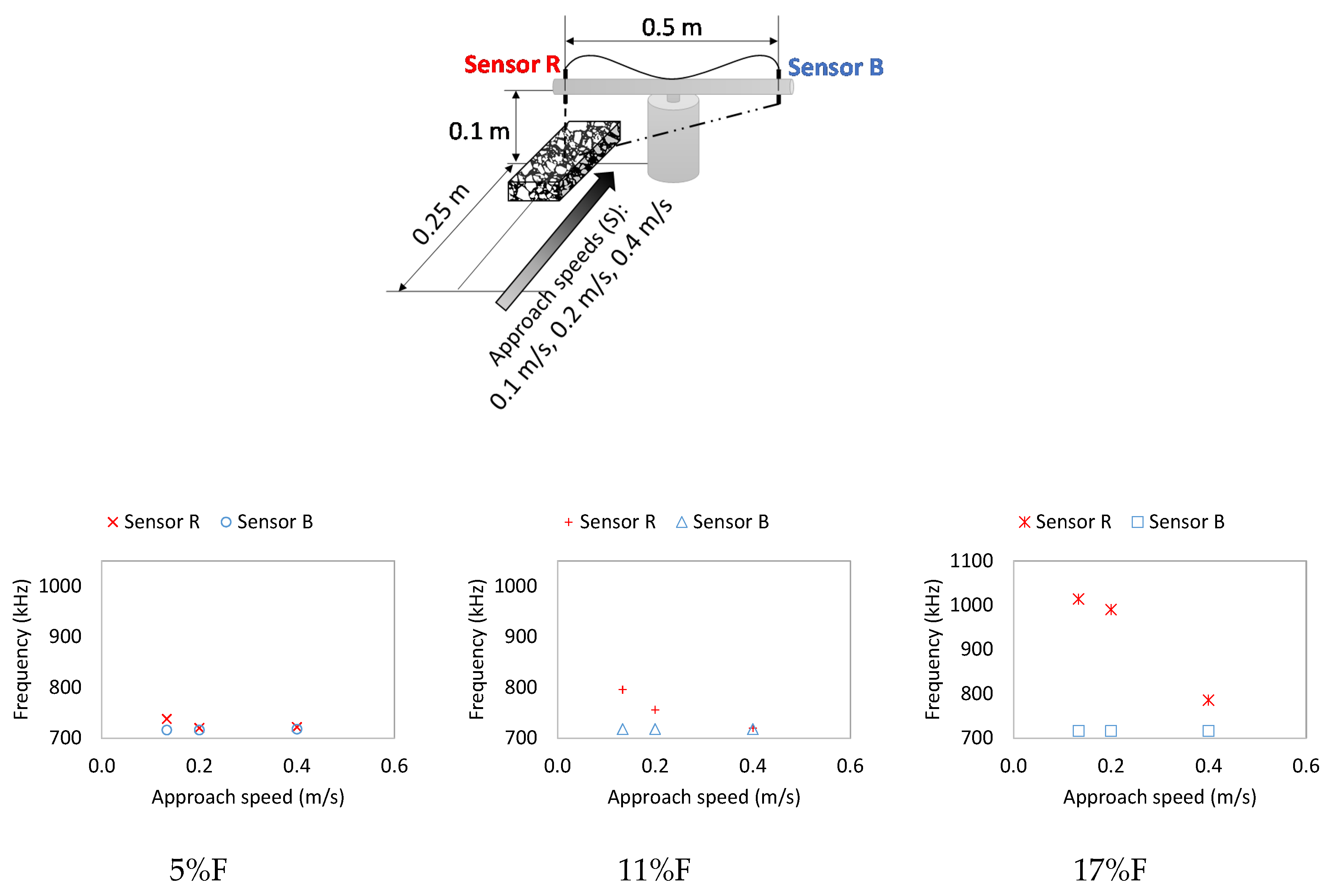
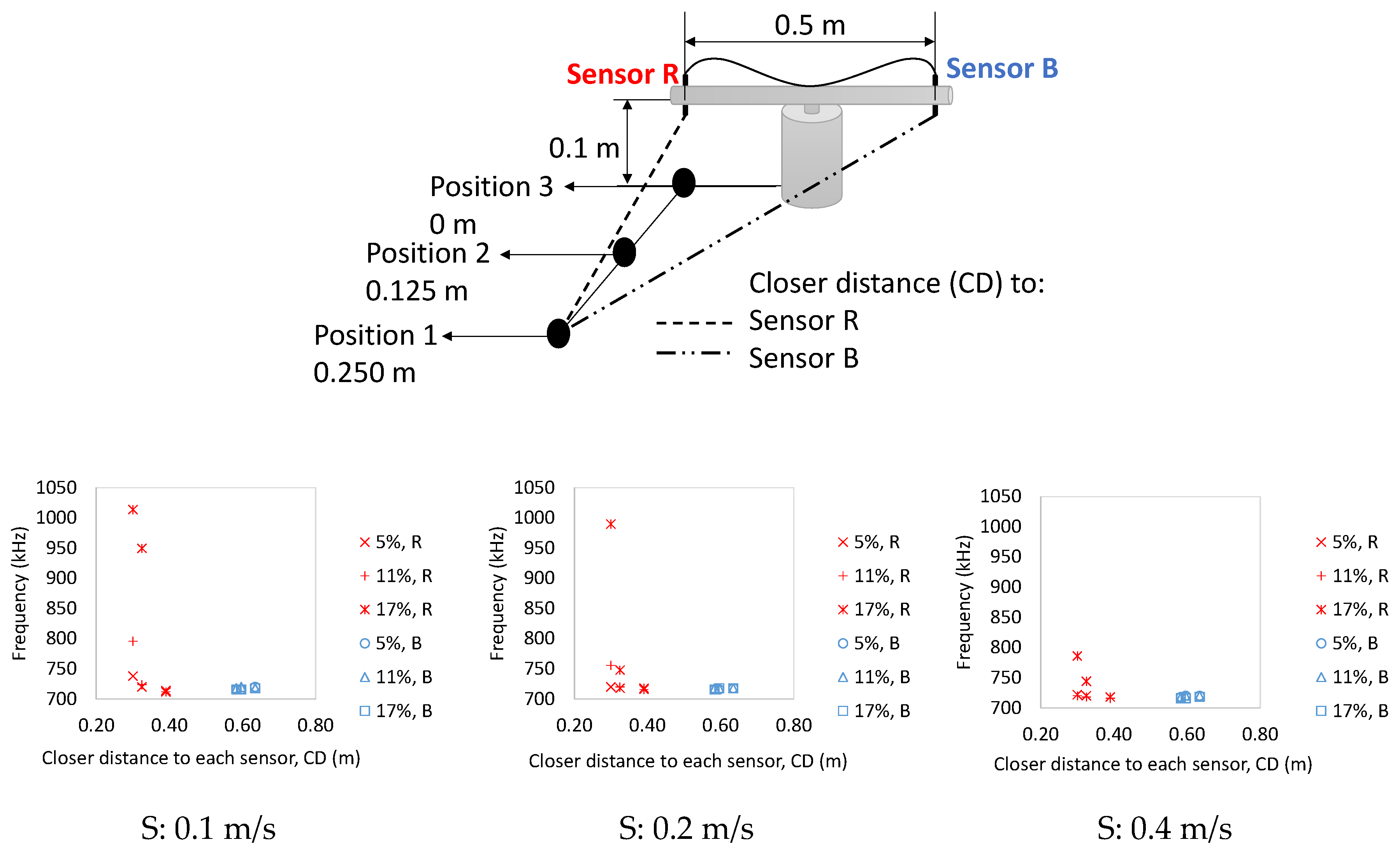
- Analysis 2. Speed influence: variation of the magnetic field strength depending on the approach speed of the encoded sample (S = 0.1 m/s, 0.2 m/s and 0.4 m/s).
- Analysis 3. Closer distance influence: variation of the magnetic field strength depending on the closer distance to the sensor (CD). As shown in Figure 4, the CD (dashed lines) depends on the measurement distance (D: Position 1 = 0.250 m, Position 2 = 0.125 m and Position 3 = 0 m) and the height of measurement (H = 0.1 m).
3. Results
4. Discussion
5. Conclusions
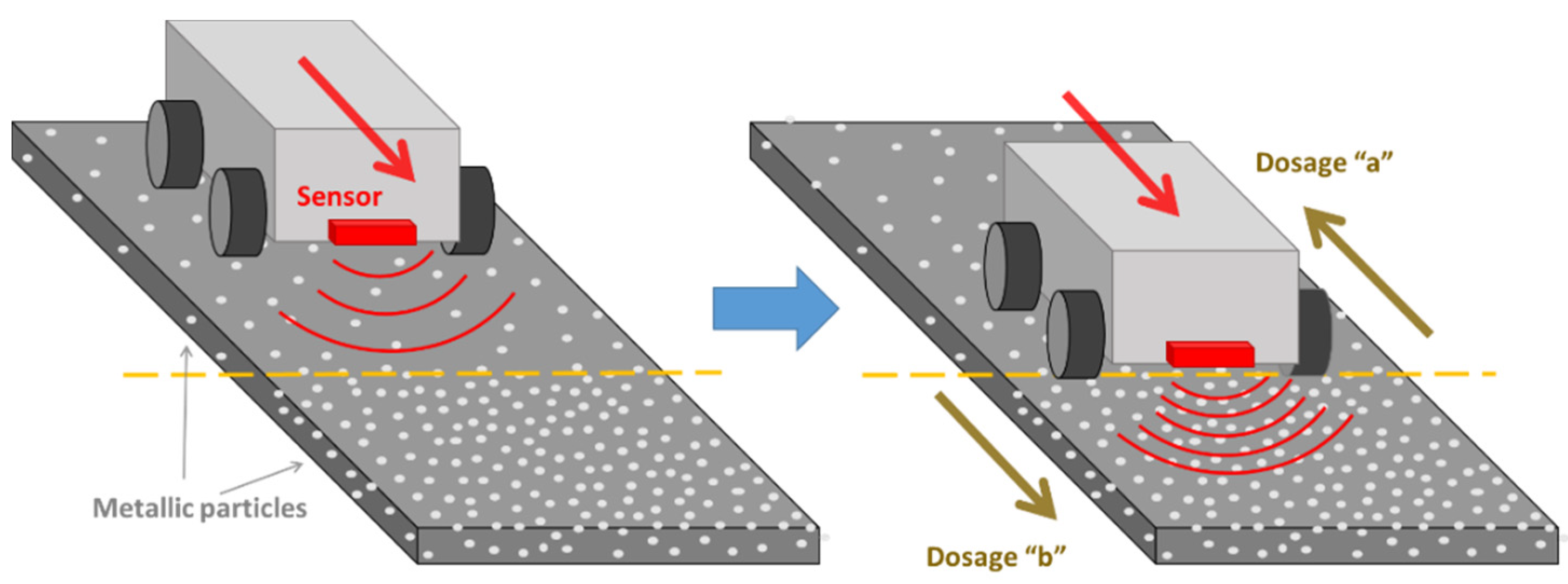
- The magnetic field signal emitted by encoded asphalt materials depends on the placement height of the sensor, the vehicle approach speed and horizontal distance of the encoded asphalt specimens.
- A proof of concept validates the possible use of the encoded asphalt materials inside the required protocols to reach a more reliable implementation of AVs. This tool could be used in future work related to the development of this technology.
- Encoded asphalt materials, and their associated technologies, could greatly support road-to-vehicle communications and better help the successful implementation of AVs.
Author Contributions
Funding
Conflicts of Interest
References
- Kim, M.-K.; Park, J.-H.; Oh, J.; Lee, W.-S.; Chung, D. Identifying and prioritizing the benefits and concerns of connected and autonomous vehicles: A comparison of individual and expert perceptions. Res. Transp. Bus. Manag. 2019, 32, 100438. [Google Scholar] [CrossRef]
- Bagloee, S.A.; Tavana, M.; Asadi, M.; Oliver, T. Autonomous vehicles: Challenges, opportunities, and future implications for transportation policies. J. Mod. Transp. 2016, 24, 284–303. [Google Scholar] [CrossRef]
- Hohenberger, C.; Spörrle, M.; Welpe, I.M. Not fearless, but self-enhanced: The effects of anxiety on the willingness to use autonomous cars depend on individual levels of self-enhancement. Technol. Forecast. Soc. Chang. 2017, 116, 40–52. [Google Scholar] [CrossRef]
- König, M.; Neumayr, L. Users’ resistance towards radical innovations: The case of the self-driving car. Transp. Res. Part F Traffic Psychol. Behav. 2017, 44, 42–52. [Google Scholar] [CrossRef]
- Howard, D.; Dai, D. Public Perceptions of Self-driving Cars: The Case of Berkeley, California. In Proceedings of the 93rd Annual Meeting of the Transportation Research Board Original Submission, Washington, DC, USA, 12–16 January 2014. [Google Scholar]
- Bansal, P.; Kockelman, K.M.; Singh, A. Assessing public opinions of and interest in new vehicle technologies: An Austin perspective. Transp. Res. Part C Emerg. Technol. 2016, 67, 1–14. [Google Scholar] [CrossRef]
- Ro, Y.; Ha, Y. A Factor Analysis of Consumer Expectations for Autonomous Cars. J. Comput. Inf. Syst. 2019, 59, 52–60. [Google Scholar] [CrossRef]
- Van Brummelen, J.; O’Brien, M.; Gruyer, D.; Najjaran, H. Autonomous vehicle perception: The technology of today and tomorrow. Transp. Res. Part C Emerg. Technol. 2018, 89, 384–406. [Google Scholar] [CrossRef]
- Moreno-Navarro, F.; Iglesias, G.R.; Rubio-Gámez, M.C. Encoded asphalt materials for the guidance of autonomous vehicles. Autom. Constr. 2019, 99, 109–113. [Google Scholar] [CrossRef]
- Fényes, D.; Németh, B.; Gáspár, P.; Asszonyi, M. Possibilities of vehicle state estimation using big data approaches. In Proceedings of the 16th Mini Conference on Vehicle System Dynamics, Identification and Anomalies, Budapest, Hungary, 5–7 November 2018; pp. 395–401. [Google Scholar]
- Arvind, C.S.; Senthilnath, J. Autonomous Vehicle for Obstacle Detection and Avoidance Using Reinforcement Learning. In Soft Computing for Problem Solving; Springer: Singapore, 2020; Volume 1048. [Google Scholar]
- Guo, J.; Deng, W.; Zhang, S.; Qi, S.; Li, X.; Wang, C.; Wang, J. A Novel Method of Radar Modeling for Vehicle Intelligence. SAE Int. J. Passeng. Cars Electron. Electr. Syst. 2017, 10, 50–56. [Google Scholar] [CrossRef]
- Lee, S.; Kim, Y.; Kahng, H.; Lee, S.K.; Chung, S.; Cheong, T.; Shin, K.; Park, J.; Kim, S.B. Intelligent traffic control for autonomous vehicle systems based on machine learning. Expert Syst. Appl. 2020, 144, 113074. [Google Scholar] [CrossRef]
- Koopman, P.; Wagner, M. Autonomous Vehicle Safety: An Interdisciplinary Challenge. IEEE Intell. Transp. Syst. Mag. 2017, 9, 90–96. [Google Scholar] [CrossRef]
- Grembek, O.; Kurzhanskiy, A.; Medury, A.; Varaiya, P.; Yu, M. Making intersections safer with I2V communication. Transp. Res. Part C Emerg. Technol. 2019, 102, 396–410. [Google Scholar] [CrossRef]
- Bakibillah, A.S.M.; Kamal, M.A.S.; Tan, C.P.; Hayakawa, T.; Imura, J.-I. Event-Driven Stochastic Eco-Driving Strategy at Signalized Intersections from Self-Driving Data. IEEE Trans. Veh. Technol. 2019, 68, 8557–8569. [Google Scholar] [CrossRef]
- Buzachis, A.; Celesti, A.; Galletta, A.; Fazio, M.; Fortino, G.; Villari, M. A multi-agent autonomous intersection management (MA-AIM) system for smart cities leveraging edge-of-things and Blockchain. Inf. Sci. (NY) 2020, 522, 148–163. [Google Scholar] [CrossRef]
- Teng, H.; Liu, Y.; Liu, A.; Xiong, N.N.; Cai, Z.; Wang, T.; Liu, X. A novel code data dissemination scheme for Internet of Things through mobile vehicle of smart cities. Future Gener. Comput. Syst. 2019, 94, 351–367. [Google Scholar] [CrossRef]
- Teng, H.; Liu, W.; Wang, T.; Liu, A.; Liu, X.; Zhang, S. A Cost-Efficient Greedy Code Dissemination Scheme through Vehicle to Sensing Devices (V2SD) Communication in Smart City. IEEE Access 2019, 7, 16675–16694. [Google Scholar] [CrossRef]
- Teng, H.; Liu, W.; Wang, T.; Kui, X.; Zhang, S.; Xiong, N.N. A Collaborative Code Dissemination Schemes through Two-Way Vehicle to Everything (V2X) Communications for Urban Computing. IEEE Access 2019, 7, 145546–145566. [Google Scholar] [CrossRef]
- Momen, M.M.A.; Fayed, H.A.; Aly, M.H.; Ismail, N.E.; Mokhtar, A. An efficient hybrid visible light communication/radio frequency system for vehicular applications. Opt. Quantum Electron. 2019, 51, 364. [Google Scholar] [CrossRef]
- Vieira, M.A.; Vieira, M.; Louro, P.; Vieira, P. Cooperative vehicular communication systems based on visible light communication. Opt. Eng. 2018, 57, 076101. [Google Scholar] [CrossRef]
- Kim, Y.H.; Chung, Y.H.O. Experimental demonstration of highway I2V using visible light communications. Appl. Opt. 2016, 55, 5840–5845. [Google Scholar] [CrossRef]
- Gheorghiu, R.A.; Bədescu, I.; Timnea, R.S. Infrastructure to vehicle communications using inductive loops. WSEAS Trans. Commun. 2014, 13, 596–605. [Google Scholar]
- Leiva-Padilla, P.; Moreno-Navarro, F.; Iglesias, G.R.; Rubio-Gámez, M.C. Analysis of the mechanical response of asphalt materials manufactured with metallic fibres under the effect of magnetic fields. Smart Mater. Struct. 2019, 29, 015033. [Google Scholar] [CrossRef]
- Leiva-Padilla, P.; Moreno-Navarro, F.; Iglesias, G. A Review of the Contribution of Mechanomutable Asphalt Materials towards Addressing the Upcoming Challenges of Asphalt Pavements. Infrastructures 2020, 5, 23. [Google Scholar] [CrossRef]
- Li, J.; Wang, Y.; Zhang, X.; Ji, C.; Shi, J. Sensitivity and Resolution Enhancement of Coupled-Core Fluxgate Magnetometer by Negative Feedback. IEEE Trans. Instrum. Meas. 2019, 5, 23. [Google Scholar] [CrossRef]
- Zhi, M.; Tang, L.; Qiao, D. Design and analysis of miniature tri-axial fluxgate magnetometer. Mod. Phys. Lett. B 2017, 31, 1750040. [Google Scholar] [CrossRef]
- Rühmer, D.; Shanmuganathan, P.; Ludwig, F.; Schilling, M. Spatial and field resolution of wire-wound fluxgates in magnetic dipole fields. Sens. Actuators A Phys. 2012, 173, 30–35. [Google Scholar] [CrossRef]
- NHTSA. Preliminary Statement of Policy Concerning Automated Vehicles; NHTSA: Washington, DC, USA, 2013.











© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Leiva-Padilla, P.; Moreno-Navarro, F.; Iglesias, G.; Rubio-Gamez, M.C. Interpretation of the Magnetic Field Signals Emitted by Encoded Asphalt Pavement Materials. Sustainability 2020, 12, 7300. https://doi.org/10.3390/su12187300
Leiva-Padilla P, Moreno-Navarro F, Iglesias G, Rubio-Gamez MC. Interpretation of the Magnetic Field Signals Emitted by Encoded Asphalt Pavement Materials. Sustainability. 2020; 12(18):7300. https://doi.org/10.3390/su12187300
Chicago/Turabian StyleLeiva-Padilla, Paulina, Fernando Moreno-Navarro, Guillermo Iglesias, and Mª Carmen Rubio-Gamez. 2020. "Interpretation of the Magnetic Field Signals Emitted by Encoded Asphalt Pavement Materials" Sustainability 12, no. 18: 7300. https://doi.org/10.3390/su12187300
APA StyleLeiva-Padilla, P., Moreno-Navarro, F., Iglesias, G., & Rubio-Gamez, M. C. (2020). Interpretation of the Magnetic Field Signals Emitted by Encoded Asphalt Pavement Materials. Sustainability, 12(18), 7300. https://doi.org/10.3390/su12187300