1. Introduction
Cycling has been receiving attention in the past decade due to its associated benefits, including improving public health, reducing greenhouse gas emissions, alleviating traffic congestion, and increasing the catchment area of public transportation [
1]. It is competitive with cars for short trips in urban regions, as it has a lower total travel cost and sometimes a shorter travel time as well [
2]. These benefits have motivated a worldwide development of bicycle networks and public bike-sharing systems (PBSs) [
3]. At present, there are more than 1,500 PBSs with more than 17 million bicycles in operation [
4].
The provision of a connected bikeway network has been proven to be one of the main measures to motivate cycling because it greatly improves cyclists’ safety (e.g., references [
1,
5]). Buehler and Pucher [
6] revealed three critical elements that a bikeway network can use to increase cycling levels, including (1) separation with the roadway traffic, (2) high continuity and connectivity, and (3) high bikeway density. These elements can also be internalized in other complex measures such as a bicycle level of service (BLOS), bicycle compatibility index, or level of traffic stress. In other words, a bikeway network that can motivate cycling should be a dense network of exclusive and continuous bikeways, in which the cyclists can ride safely and encounter fewer detours. It is noted that these elements are also implicitly covered in the existing bikeway network design models. The bikeways (and the intersections) are required to meet a predefined level of service, and the trip lengths for the origin-destination pairs should be minimized or below a predefined upper bound ([
2,
7]). Though the setup of exclusive bikeways offers a safer cycling environment, its adverse impacts on the existing traffic (e.g., reducing the roadway capacity or on-street parking spaces) should be addressed in order to achieve a balance between the performance of the bikeway and the roadway networks. This introduces bikeway network design problems involving a co-existing roadway network (e.g., references [
8,
9]).
In addition to these elements, the bikeway network design needs to consider the trade-off between the travel time between every origin-destination (O-D) pair and the bikeway construction costs. By increasing the bikeway density, the travel times between the O-D pairs can be reduced, and more cycling activities can thus be motivated ([
2,
10]). However, higher bikeway density incurs a higher bikeway setup cost. Since the setup costs for a bikeway network are often limited, there is a question on how a bikeway design that minimizes total travel times for all cyclists can be achieved under the budget constraint. However, previous bikeway design studies have not addressed this question and only focus on either cost minimization or travel time minimization (e.g., references [
2,
7,
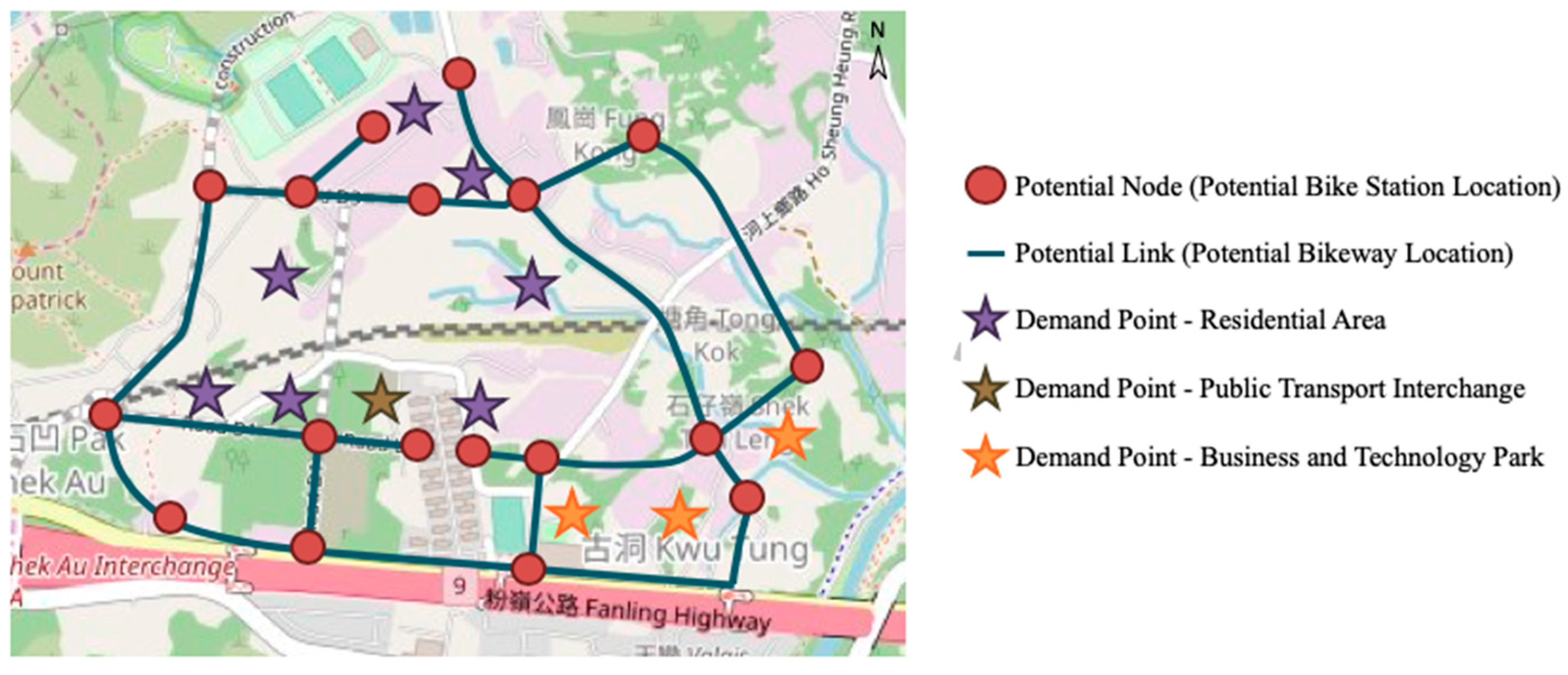
9]). On the other hand, a bikeway network needs to handle its service coverage. A common approach is to assume an aggregated demand at each potential bike station, while the objective of the bikeway network design is to connect all potential stations with minimal costs in order to cover all demands. However, this approach neglects the fact that the demand points (e.g., transport interchanges, tourist spots, and schools) are not located exactly at but instead close to all potential nodes: as long as there is one station proximate to a demand point, the bikeway network can cover that demand point. In other words, it is sufficient to cover all demands by selecting a set of nodes among all potential nodes (this set of nodes can be named as a selected node set), and the bikeway layout that connects these selected nodes must have a
lower construction cost than that connects all potential nodes. This concept of demand coverage is modeled in bike station location design (e.g., reference [
11]) but never in bikeway network design, which is used to determine the selected node set and connect these nodes by using bikeways. This study, therefore, proposes a new bikeway design problem that minimizes the total system travel time between the selected nodes under both the budget and demand coverage constraints.
As the above novel problem involves two types of discrete decisions (i.e., locations of the selected nodes and built bikeways), this study prefers to develop a two-stage heuristic to solve the proposed problem. The first stage node selection is solved by the classic Genetic Algorithm, which has proved to be powerful in solving many combinatorial problems (e.g., reference [
12]). Meanwhile, this stage can also be solved by other meta-heuristics (e.g., a tabu search and large neighborhood search). Nevertheless, no existing heuristic is applicable to solve the second-stage bikeway construction. As a congestion-free transport mode, the travel time of the bikeway is always assumed to be flow-independent and constant (e.g., reference [
7]), and therefore the optimal route for all cyclists of each O-D pair is equivalent to the lowest cost route. Nevertheless, this problem is not equivalent to the shortest path problem because of the budget constraint. The overall bikeway construction cost is limited and sometimes needs to be minimized, which is similar to the minimum spanning tree problem or Steiner tree problem.
Table 1 compares the common shortest path problems and minimum spanning tree problems with respect to the number of origins and destinations considered in these problems and lists out their design objectives, and the common heuristics used to solve these problems (i.e., references [
13,
14,
15,
16,
17,
18]). Regarding the problem type, “1”, “all”, and “some” represent the number of nodes chosen to be the origins/ destinations, in which “some” indicates that a subset of nodes among all nodes are selected to be the origins/ destinations (which cannot be “one” or “all”). It is noted that unselected nodes can be included in the “selective” case if they can reduce the total cost and maintain the connectivity of the selected nodes. The design objectives can be classified into two classes, cost (weight) minimization, and travel time minimization. The former aims to determine a network that connects the nodes with minimal weight, and the latter aims for a set of minimal cost routes between the origin(s) and the destination(s). In other words, the former guarantees a minimal overall construction cost while the latter provides minimal travel costs between the O-D pairs, but none of them can provide an intermediate solution, which is a network with minimal total travel time under a given budget, especially in the case with a selected set of nodes. In addition, the studied problem should be distinguished from the Generalized Minimum Spanning Tree (G-MST) problem [
19] which aims to connect part of the nodes in the network with minimum construction cost. In G-MST, each node has been firstly allocated to a group, and the resultant network requires that all groups should be connected, which implies that at least one node in each group is required to be connected. However, this study does not have any predefined group as not all nodes are selected, so the requirement that at least one element in each group cannot be held. As the studied problem differs from the above-discussed problems significantly, the heuristics used in those problems cannot be applied directly and thus a novel heuristic, namely the elimination heuristic, is constructed to solve the second stage problem. Moreover, as shown in
Table 1, both our proposed problem and solution method are novel to the literature while it can be applied in other network design problems.
To summarize, the main contributions of this study include:
We propose a novel bikeway network design problem that covers all demand sources and minimizes the total travel times of all cyclists under a budget constraint;
We propose a two-stage solution method based on the genetic algorithm and an elimination heuristic which determines the selected node set that covers all demand sources and the bikeway layout respectively;
We investigate the effect of weights of the elimination factor, budget, and size of the selected node set on the final design. Two case studies in Hong Kong are provided to illustrate the effectiveness and applicability of the model.
The outline of this paper is listed below.
Section 2 presents the problem descriptions and
Section 3 describes the solution method.
Section 4 provides the numerical results and
Section 5 provides a real case example. A conclusion is given in
Section 6.
2. Problem Descriptions
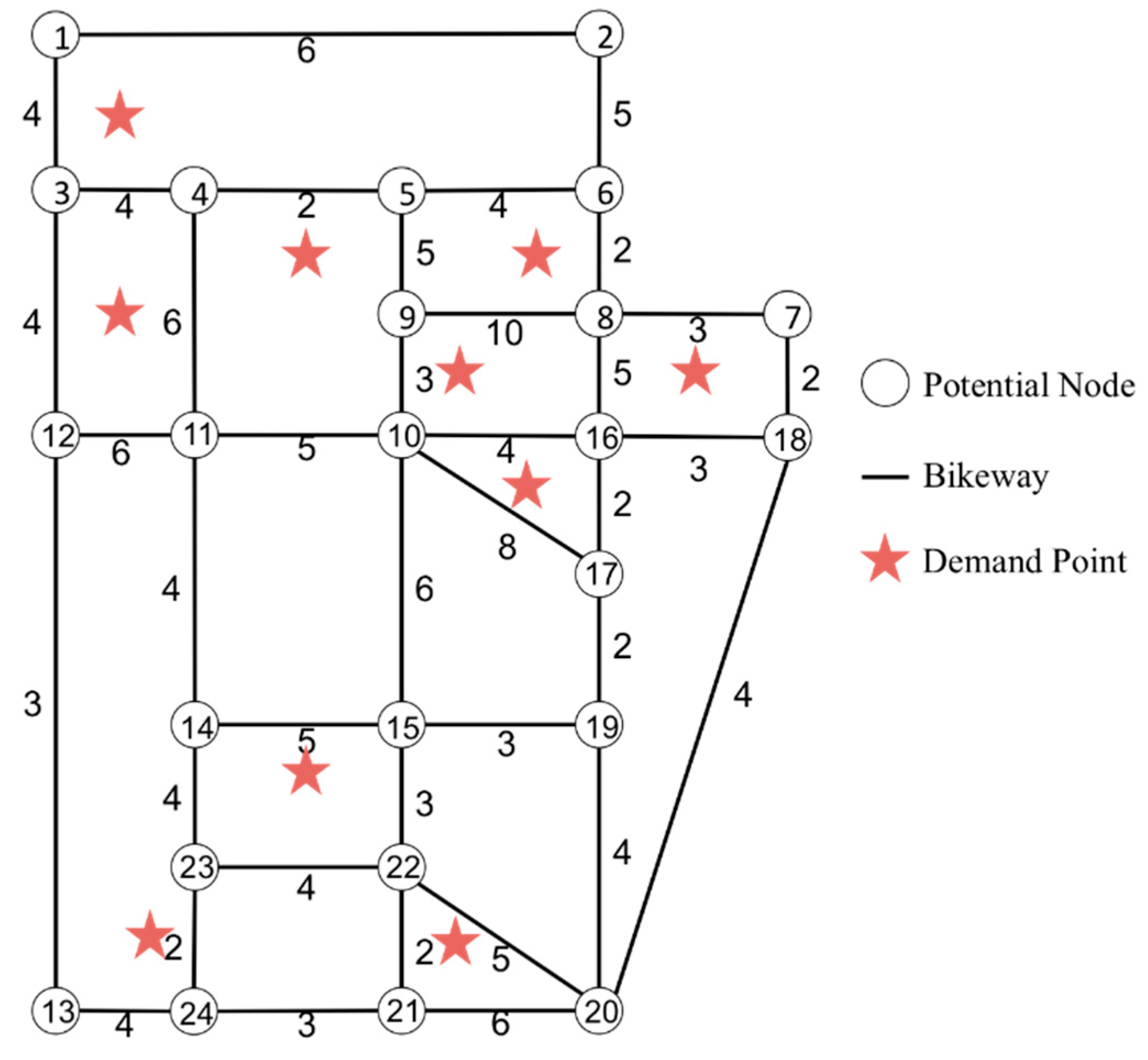
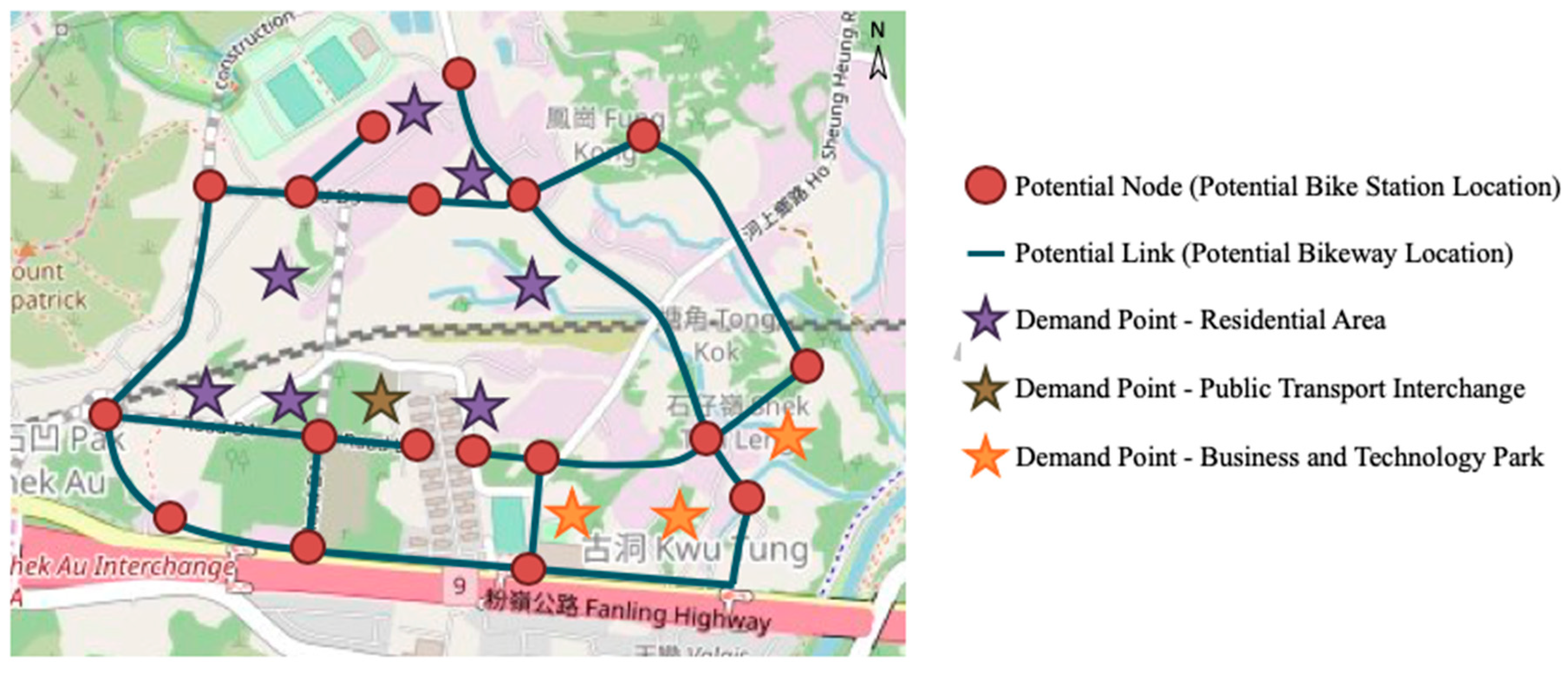
The design problem is described below. We firstly consider a potential bikeway network
G(
V,
E) with potential bike station location (i.e., node) set
V, potential bikeway set
E, and demand point set
D. The total demand traveling from point
k to point
l is denoted as
, where
, and each bikeway that directly connects stations
i and
j, i.e.,
, has the setup cost
where
. The travel time
between the nodes can be different with respect to the travel direction to consider the case that the bikeway is built on a slope. In other words, the downhill travel time can be greatly reduced compared to the uphill travel time. Each demand point
is considered as “covered” when there is at least one proximate bike station for convenient bicycle pick up/ drop off (which should be less than 500 m, as revealed by reference [
20]). This defines
as the set of potential bike stations which are proximate to demand point
k, where
. It is also assumed that every demand point is covered by at least one potential bike station (i.e.,
). The budget for the total bikeway construction is set to be
B. For simplicity, all potential bike stations are assumed to have unlimited capacity.
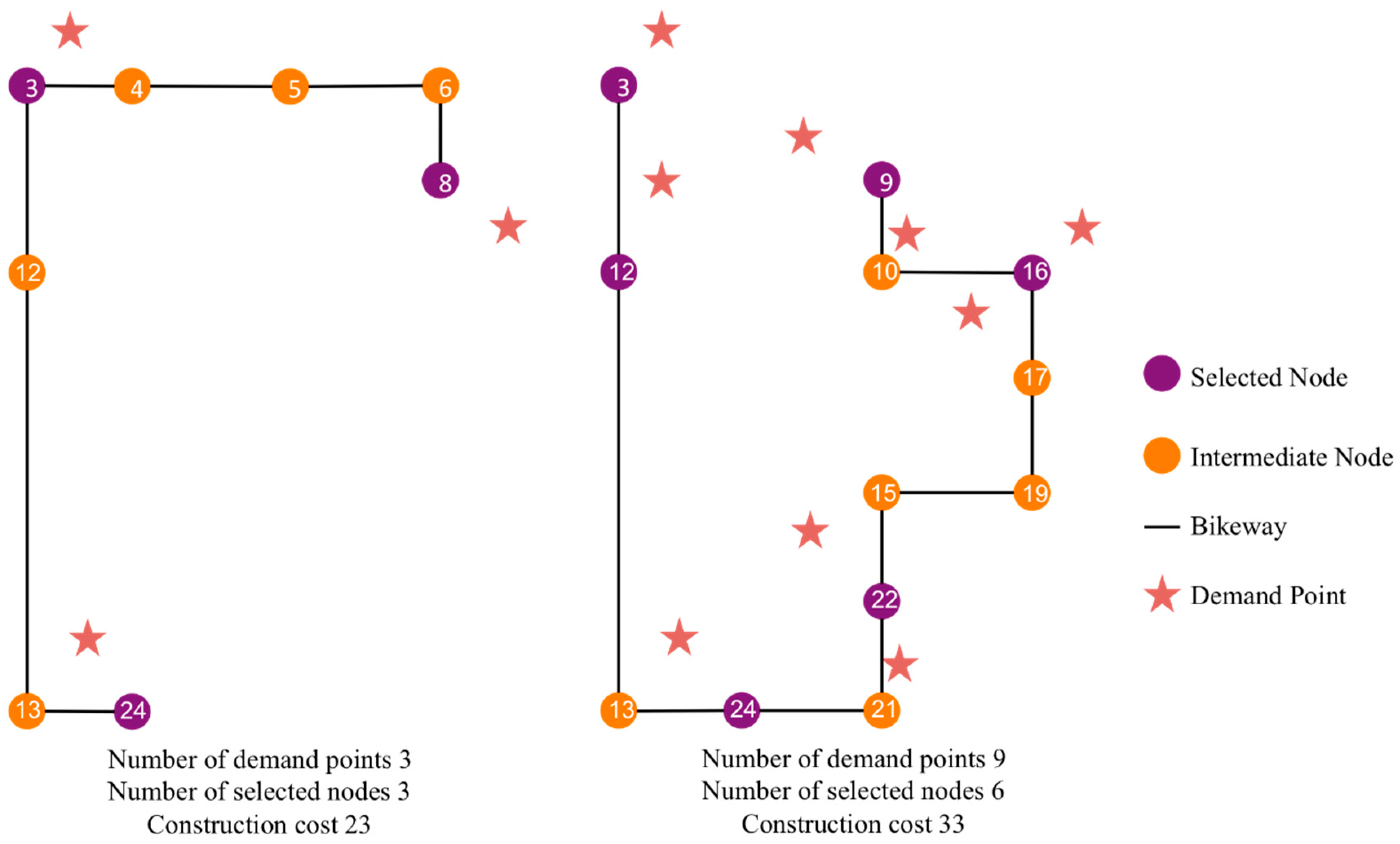
This design problem involves two types of design decisions. The first type is to determine whether a node is picked as a selected node, denoted by a binary decision variable which equals 1 if node i becomes a selected node and 0 otherwise. A selected node is defined as a node that covers at least one demand source and is connected by at least one bikeway. To separate the selected nodes from the unselected nodes, all selected nodes are put into a new set S, where . The second type is the binary decision variable for opening a bikeway , which equals 1 if the bikeway that connects nodes i and j is constructed and 0 otherwise. An additional note is that we have assumed that every built bikeway has sufficient capacity to accommodate all bike flows and thus the travel time can be a flow-independent constant. In other words, if the bikeway travel time is flow-dependent, a possible extension is to include the third type of decision variables, flow on each bikeway, in the design problem.
This problem involves determining the bikeway layout under four following conditions: (a) the total travel times of all cyclists is minimized, (b) all demand points are covered, (c) all selected node pairs are connected by bikeways, and (d) the total bikeway setup cost does not exceed the budget.
The design objective based on condition (a) can be expressed as
where
denotes the lowest travel time between stations
i and
j based on the constructed bikeways, where
. For the demand between points
k and
l,
, the shortest path is determined among a maximum of
possible paths formed by the potential bike stations close to these two points. Among these paths, the shortest path is the one that has the minimum travel time and the origin and destination of the path are selected nodes. When both points share the same selected node, the travel time between the nodes becomes 0. When there are multiple shortest paths with respect to time between a pair of selected nodes, all demands are assigned to the path with the lowest setup cost. As a result, all demands of a pair of selected nodes are only assigned to a single shortest path.
Proposition 1. For every feasible solution to the problem, there exists at least one path between every pair of demand sources.
Proof. Condition (b) implies that at least one bike station proximate to a demand source is a selected node to cover all demand points. Thus, both the origin and the destination of every pair of demand sources have been covered by the selected node. From condition (c), every pair of selected nodes must be connected by at least one path. Therefore, there must be at least one path between every pair of demand sources and this completes the proof. □
Condition (b) (i.e., demand coverage constraint) is satisfied when all demand points are covered by at least one selected node, which can be expressed as
Constraint (2) ensures that at least one potential bike station proximate to each demand point is a selected node. The connectivity between the selected nodes (i.e., conditions (c)) is hard to be expressed solely by and as the paths between the selected nodes can involve links that consist of unselected nodes. Unlike the minimum spanning tree, we can neither exclude cycles nor set exact bounds to the number of links because the final network layout is unlikely to be tree-like. The connectivity condition can, therefore, be described by the following set of necessary but not sufficient conditions: first, each selected node is connected by at least, but not exactly, one bikeway; and second, the two ends of an opened bikeway can be both unselected nodes.
Finally, condition (d) can be formulated as the total bikeway setup cost cannot exceed a given budget
B, which can be expressed as
As the problem contains the complicated connectivity constraint which cannot be expressed mathematically, metaheuristics should be adopted to solve the problem.
3. The Two-Stage Solution Method
This section presents a two-stage solution method to solve the proposed problem. A genetic algorithm (GA) is adopted firstly to determine the optimal selected node set, and a proposed elimination heuristic (EH) determines the optimal bikeway layout that minimizes the total travel cost without violating the budgetary constraint based on the selected node set.
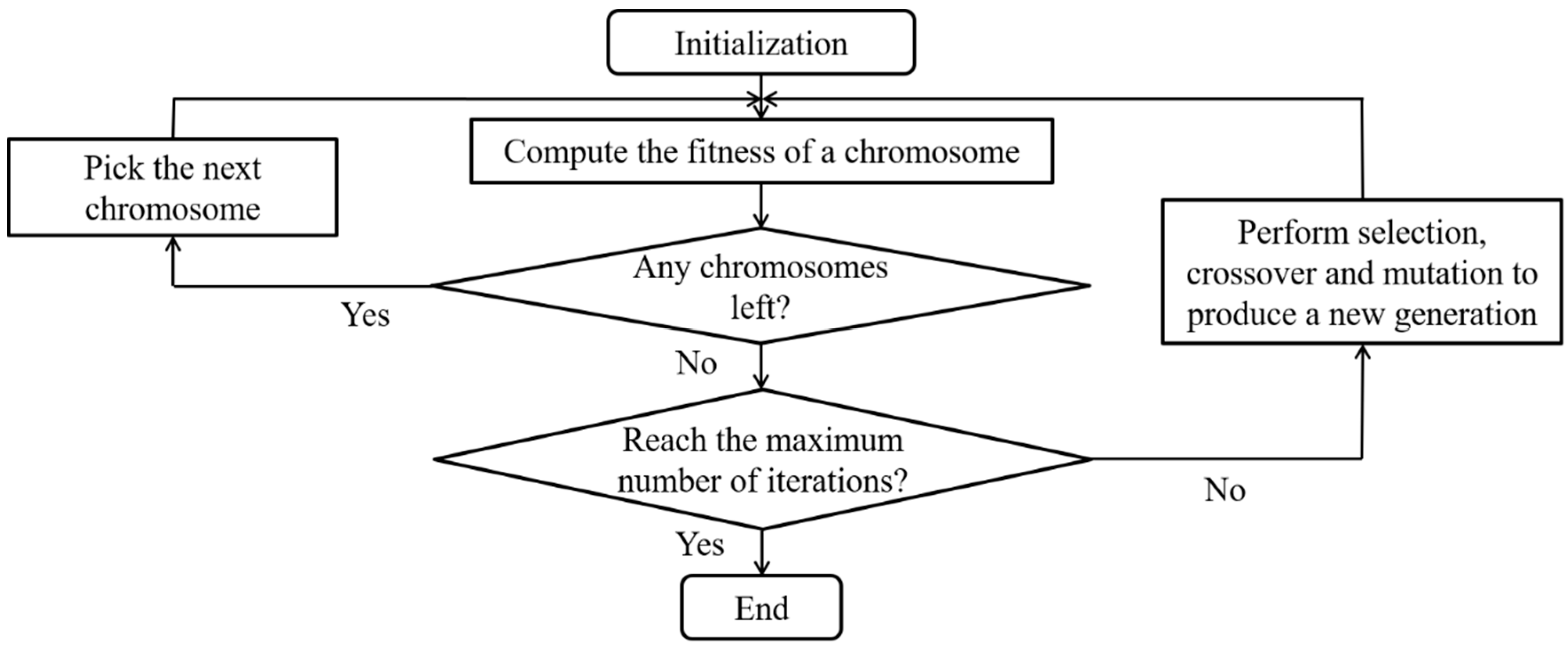
3.1. The Genetic Algorithm
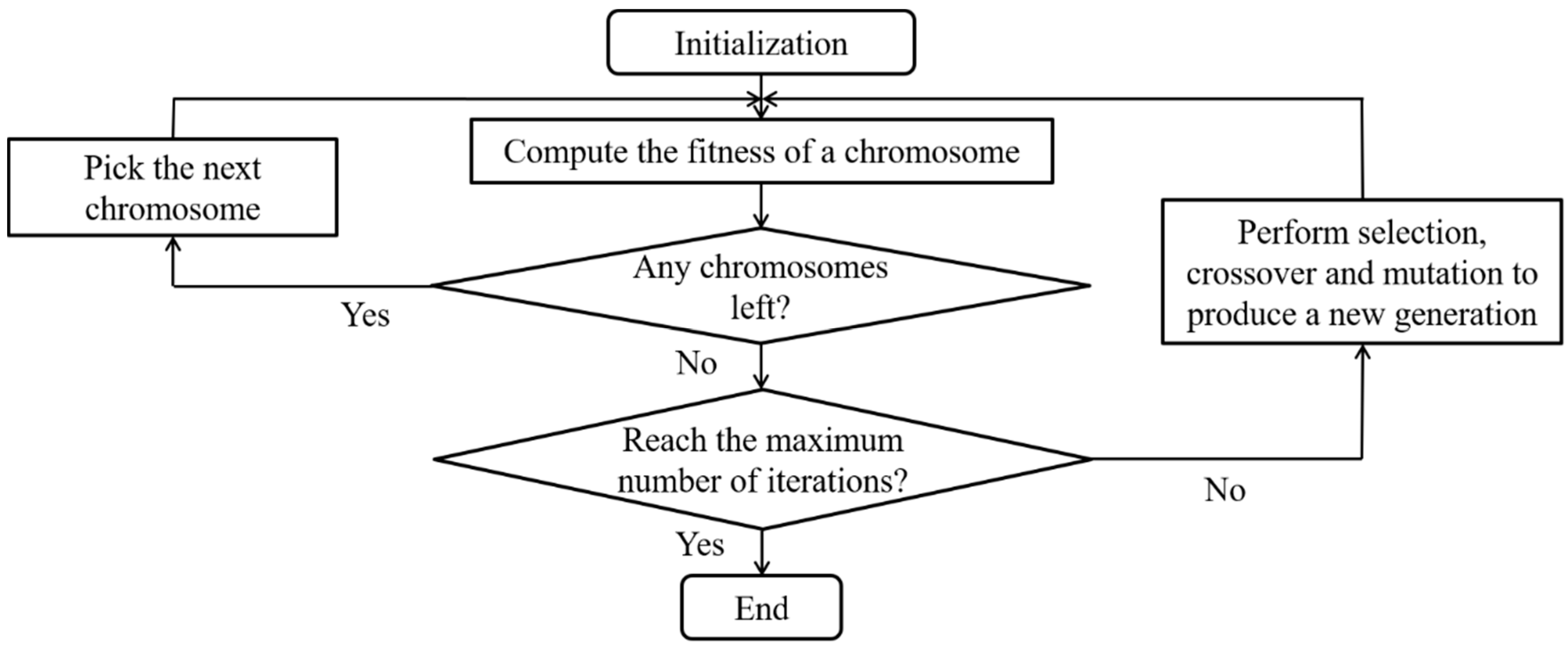
Figure 1 illustrates the general scheme of the GA for determining the optimal node set. At first, a population of solutions is initialized randomly, in which each individual (solution) in GA is represented by a chain of binary digits with length |
V| (number of potential stations). The number of ‘1’s on each chain can be interpreted as the selected nodes of that solution. After evaluating the fitness of all initial solutions, the truncation selection method is adopted to select the
x% of the fittest parents in the population and duplicate
times to replace the less fit parents. For example, when the fittest 50% of parents are selected from a population of 100 individuals, the selected parents are duplicated 2 times so that a population of 100 individuals can be maintained. Then the parents would have a certain probability of undergoing crossover and mutation for generating new offspring. In the crossover, a crossover point along the chain is randomly selected, and all digits beyond that point are swapped between the two parents. In mutation, a random position in the solution is picked for flipping the bit at that position (as each position can be either 0 or 1). After the crossover and mutation processes, the solutions are compared to remove replicated solutions. Meanwhile, an elitist selection is carried out in GA by storing the best solution from the current generation to be carried over to the next iteration without alteration. The above process is repeated until the maximum number of iterations is reached.
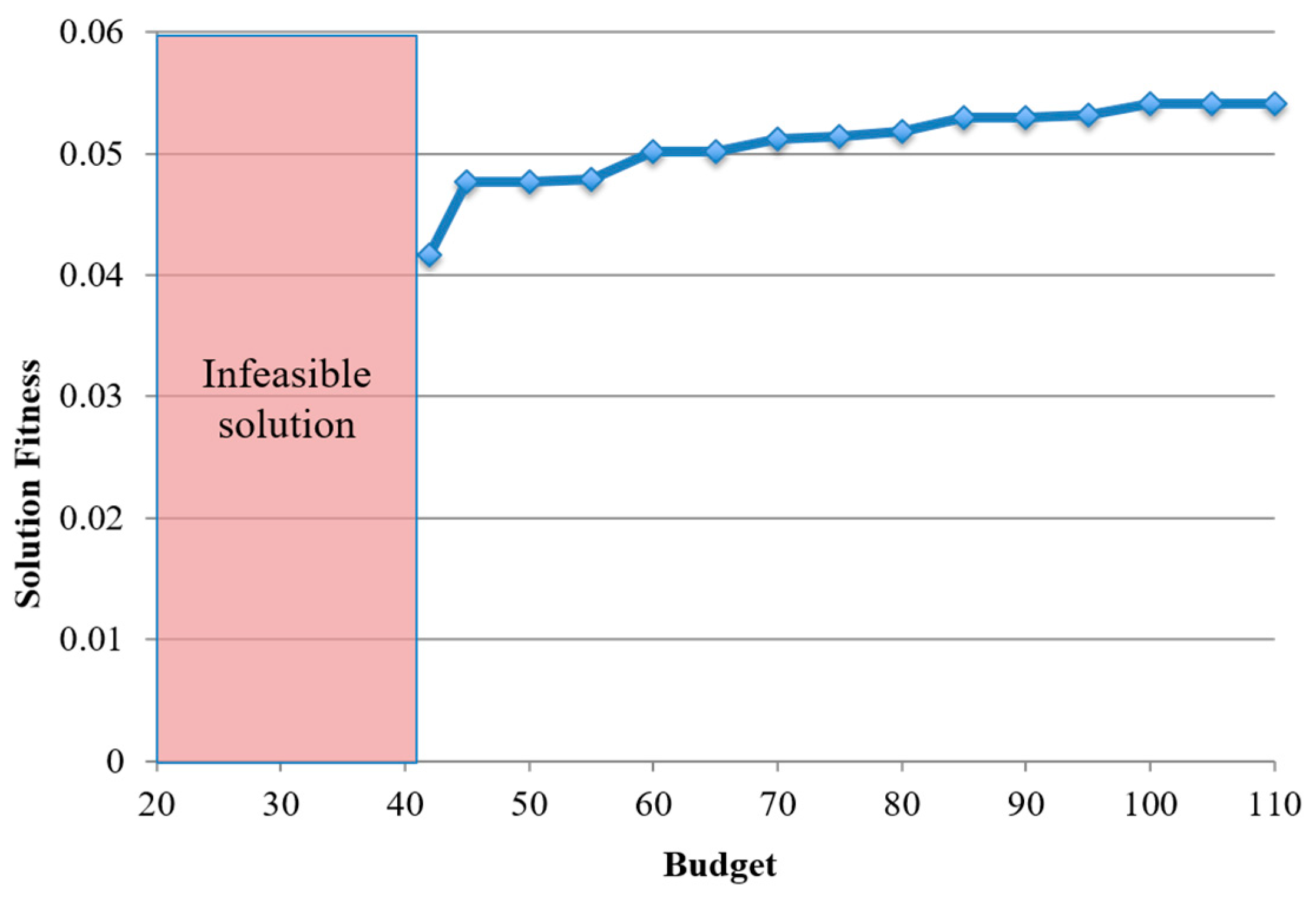
Every generated solution needs to undergo a three-stage solution fitness evaluation. The first stage is a demand coverage check that verifies whether the selected nodes can cover all demand sources. The solution is regarded as infeasible if the selected nodes cannot cover all demand points: its fitness is not further evaluated and a large penalty is imposed. In contrast, a selected station set that can cover all demand points is regarded as feasible and its fitness is then evaluated by the elimination heuristic. The second stage is used to evaluate if the cost of the bikeway network falls below the budget. The elimination heuristic (introduced in
Section 3.2) aims to determine a feasible bikeway layout for a given selected node set (from stage 1) which connects all selected nodes and does not exceed the budget. If all selected nodes cannot be
completely connected under the given budget, the selected node set is also classified as infeasible, and a smaller penalty (compared with the penalty for demand coverage) is imposed on that infeasible node set. After screening out the infeasible solutions, the third stage is to determine the objective values (total system travel times) of the remaining feasible solutions, and the solution fitness can be calculated as the reciprocal of the objective value.
3.2. Elimination Heuristic
The EH is applied to every selected station set which covers all demand points (determined by GA) in order to determine a feasible bikeway layout that does not violate the budget constraint. The steps of the EH are as follows:
- Step 1
Obtain the network GF with the shortest paths between all pairs of selected nodes EF. Terminate if budget B is not exceeded.
- Step 2
Assign an elimination factor to each link in GF according to its path count and cost . List and sort the links in descending order .
- Step 3
Remove the link with the largest in the list and evaluate the network connectivity. Undo the link removal if the selected nodes become disconnected.
- Step 4
Remove the evaluated link from the list.
- Step 5
Repeat Step 3 until the cost is equal to or lower than B. If the cost is still higher than B after removing all possible links, a penalty is given to the selected node set to denote the solution infeasibility.
Step 1 is to construct a network GF(VF, EF) which consists of the node set VF and path set EF, in which VF and EF correspond to the selected node set S and the set of shortest paths between the selected node pairs respectively. To determine EF based on the original network G(V, E) and S, this study applies the minimum spanning tree algorithm (with respect to travel time) for |S| times. The information of all shortest paths between all pairs of selected nodes (e.g., total cost, total travel time, and links included in the path) is then determined and stored. In other words, all selected nodes can reach other selected nodes with the lowest travel times. At this stage, the resultant bikeway network at this step has the lowest total system travel time and the highest total construction cost as most bikeways are constructed.
Step 2 is to determine the order of elimination of the built bikeways given in Step 1 by using the elimination factor to meet the budget constraint. The link-based factor is composed of two parts, the construction cost , and the path count , and expressed as , where a and b are the non-negative weights for the cost and reciprocal of the path count, respectively. Path count describes the number of shortest paths using the link which can be determined based on the stored path information in Step 1. In other words, links that have higher costs or fewer shortest paths have a larger elimination factor, which implies higher chances to be eliminated. Using this factor is better than simply removing links with respect to cost because it avoids removing high-cost links used by a large number of shortest paths. For simplicity, the elimination factors of all links remain unchanged throughout the evaluation of each solution. In addition, the bikeways which perform as the only link that connects the selected node with other nodes are automatically removed from the list despite a low path count or a high construction cost.
Step 3 evaluates the connectivity between the selected nodes to determine whether any selected node pairs have been permanently disconnected after each bikeway removal. Instead of reconstructing all paths EF, this step focuses on checking those paths that include the removed link. The heuristic determines whether the two ends of the removed link can be connected by a new path using other built bikeways. If they cannot be connected, the removed link is restored; if they can be connected, the travel times of those affected paths are updated.
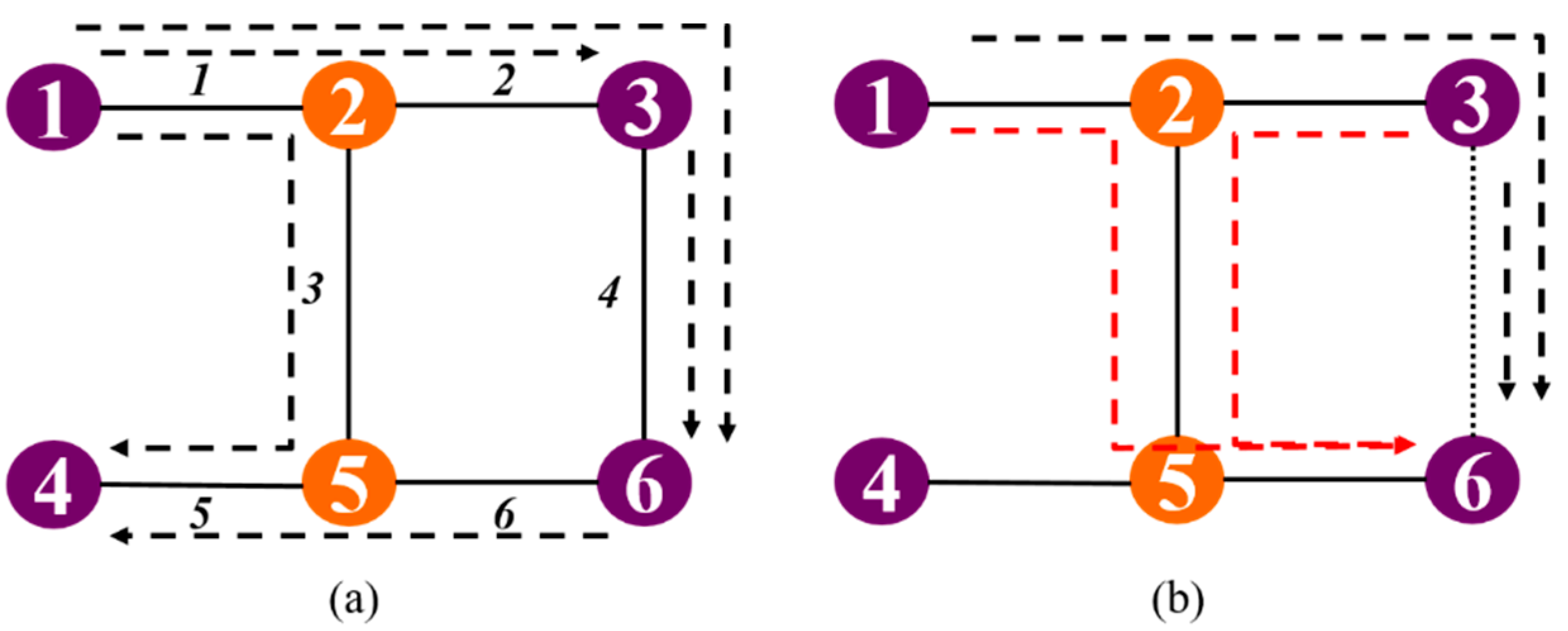
The calculation of the updated travel time is not equivalent to the simple addition of the difference in travel time between the new path and the removed link, which can be explained by an example shown in
Figure 2a,b. In these figures, nodes 1, 3, 4, and 6 are the selected nodes while nodes 2 and 5 are not. The solid lines denote the built bikeways, the black dotted lines with arrow denote the shortest paths between the selected nodes, and the italic numbers denote the link number.
Figure 2a,b show that the initial shortest paths between the selected nodes and the case after link 4 is removed, respectively. When link 4 is removed (in
Figure 2b), two shortest paths (between nodes 3-6 and nodes 1- 6) need to be re-routed and the updated shortest path between nodes 3 and 6 becomes 2-3-6. Meanwhile, if this updated shortest path sequence between nodes 3 and 6 is directly substituted into the original shortest path between nodes 1 and 6 (i.e., 1-2-4), the shortest path becomes 1-2-2-3-6 that link 2 is visited twice consecutively which shows a redundant visit on link 2. Therefore, the updated shortest path between nodes 1 and 6 should completely remove the duplicated links and thus becomes a path with link sequence 1-3-6.
Based on these two cases, the network connectivity evaluation and path updates follow the following steps:
- Step 3.1
Determine the new shortest path W that joins the two ends of the removed link V and store its link sequence.
- Step 3.2
Update the shortest paths in EF that contain V by directly substituting I with W.
- Step 3.3
Determine the updated travel time T’ and link sequence of each shortest path following the below rules:
- (a)
If it has no duplicated link, then T’ is the sum of the original travel time and the travel time difference between V and W, and the updated link sequence is obtained by simply substituting V with W.
- (b)
If there are duplicated links, T’ is calculated by firstly following Step 3.3(a) and then subtracting two times the sum of the duplicated links along the route, and the duplicated links are removed from the link sequence of the updated shortest path formed in Step 3.2.
After removing a link, the path counts of all built bikeways are updated and the built bikeways with zero path count are then immediately removed from the list.
Finally, Step 5 is the termination criteria of the EH in which the heuristic stops only if the total setup cost is lower than the given budget. To distinguish the infeasible solutions with the feasible ones, a large penalty is imposed when the network connectivity is not conserved. This gives preferences to the all-connected networks instead of disjoint networks.
6. Conclusions and Future Directions
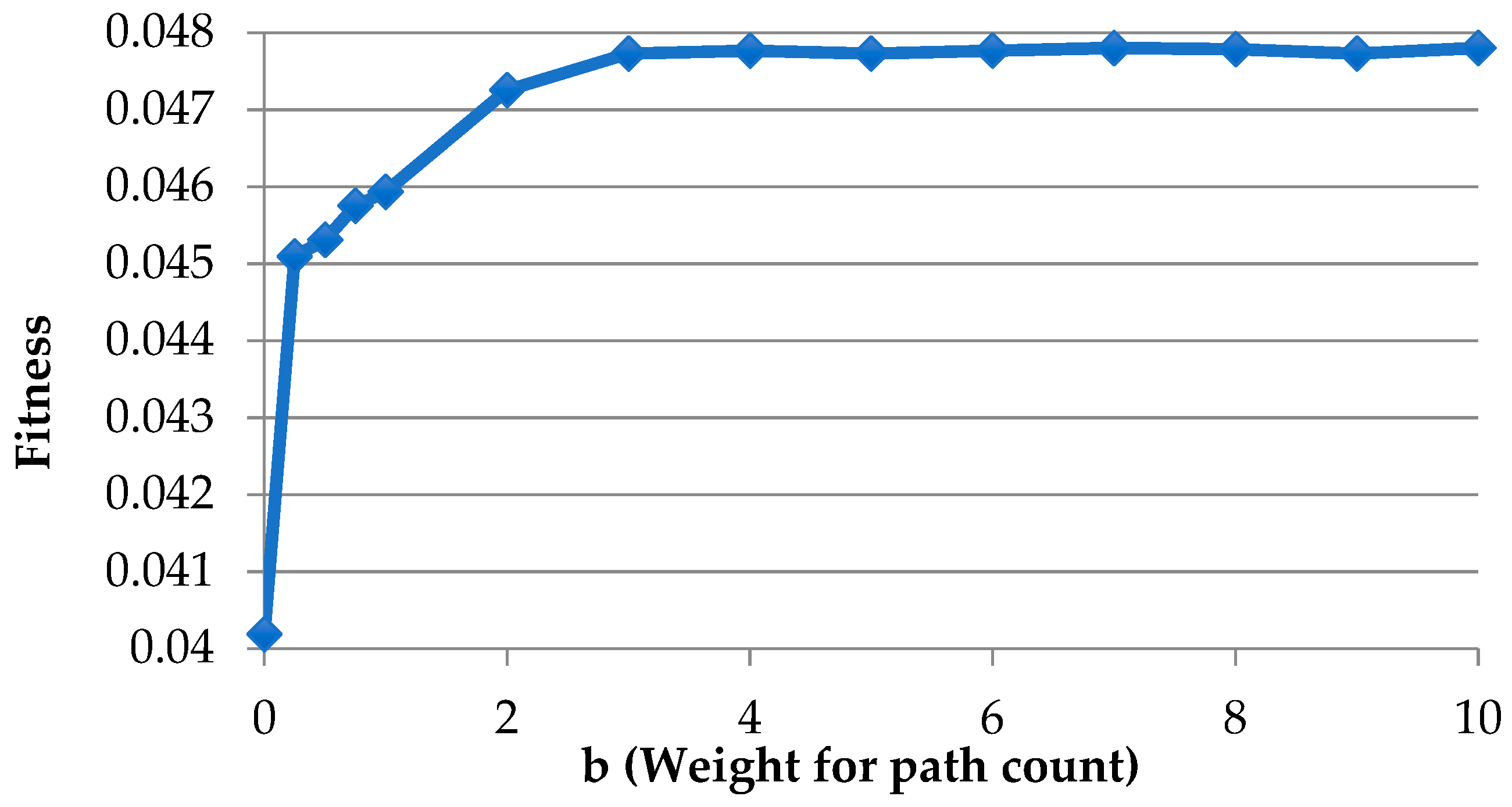
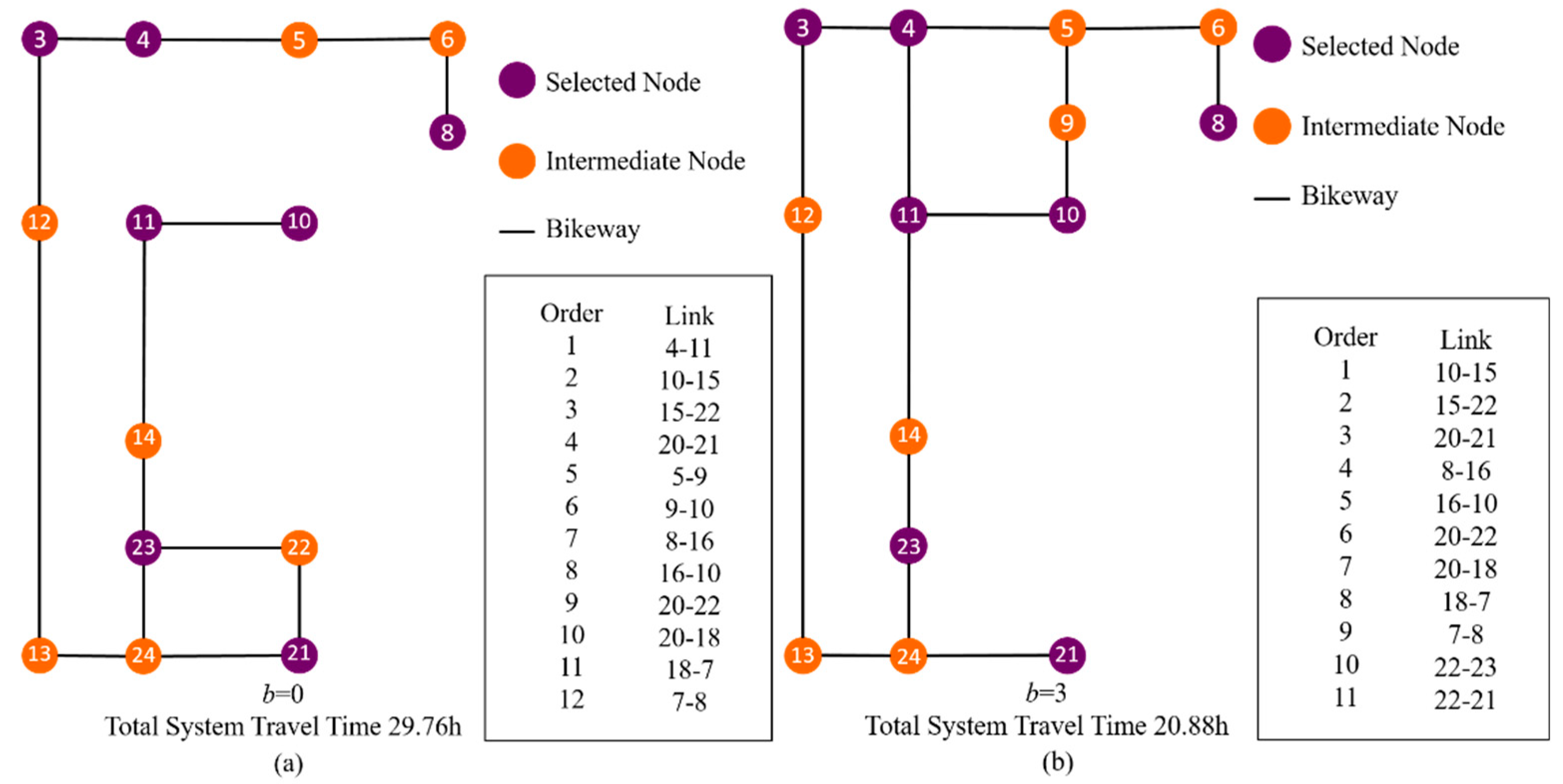
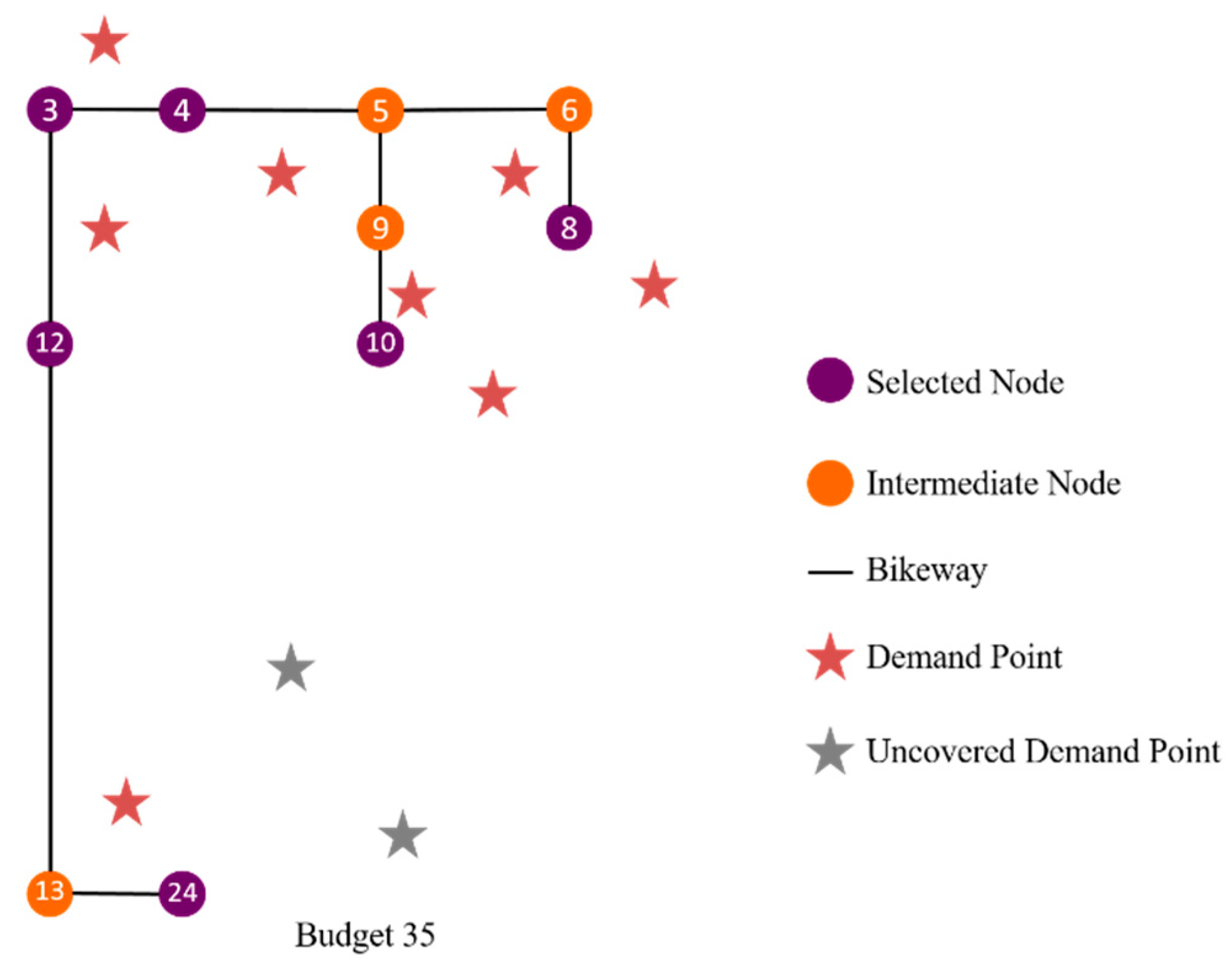
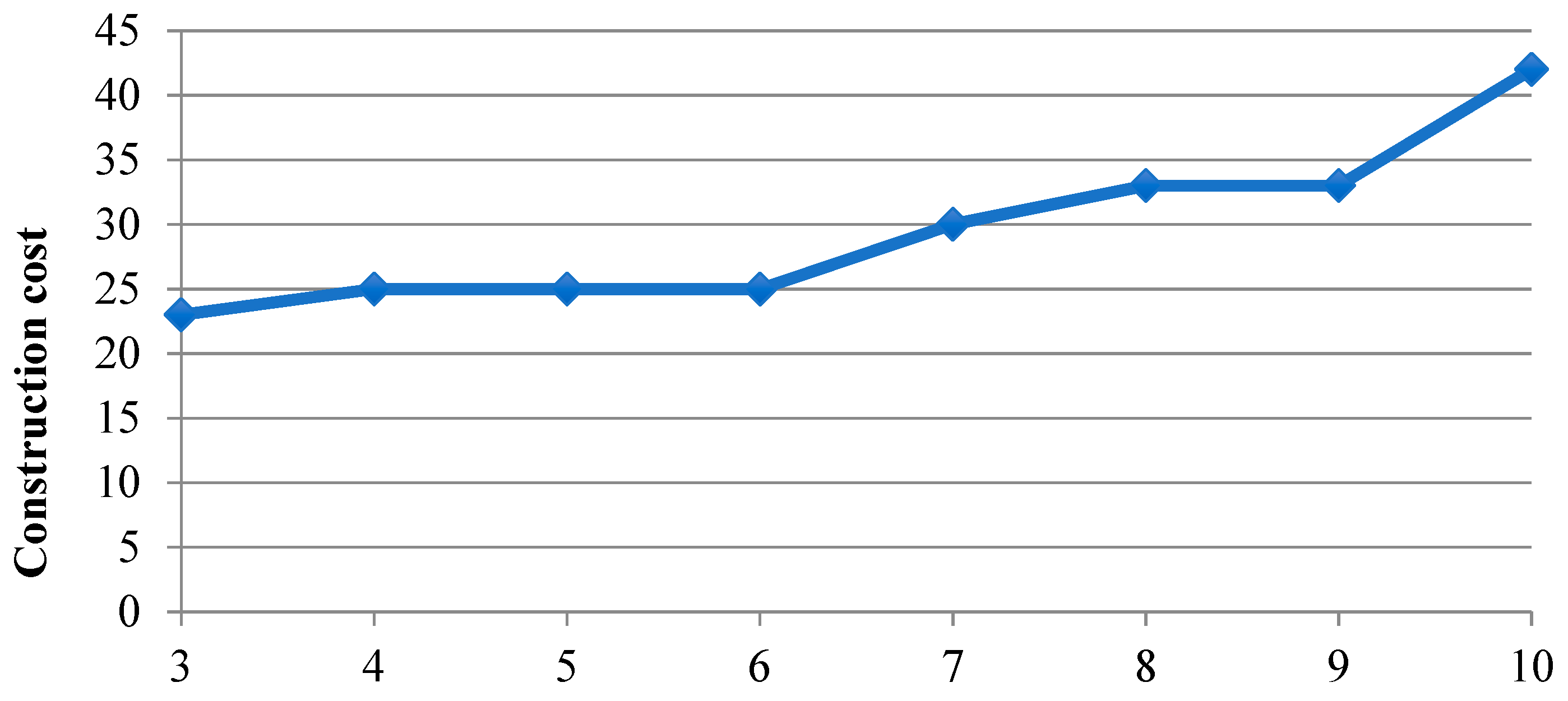
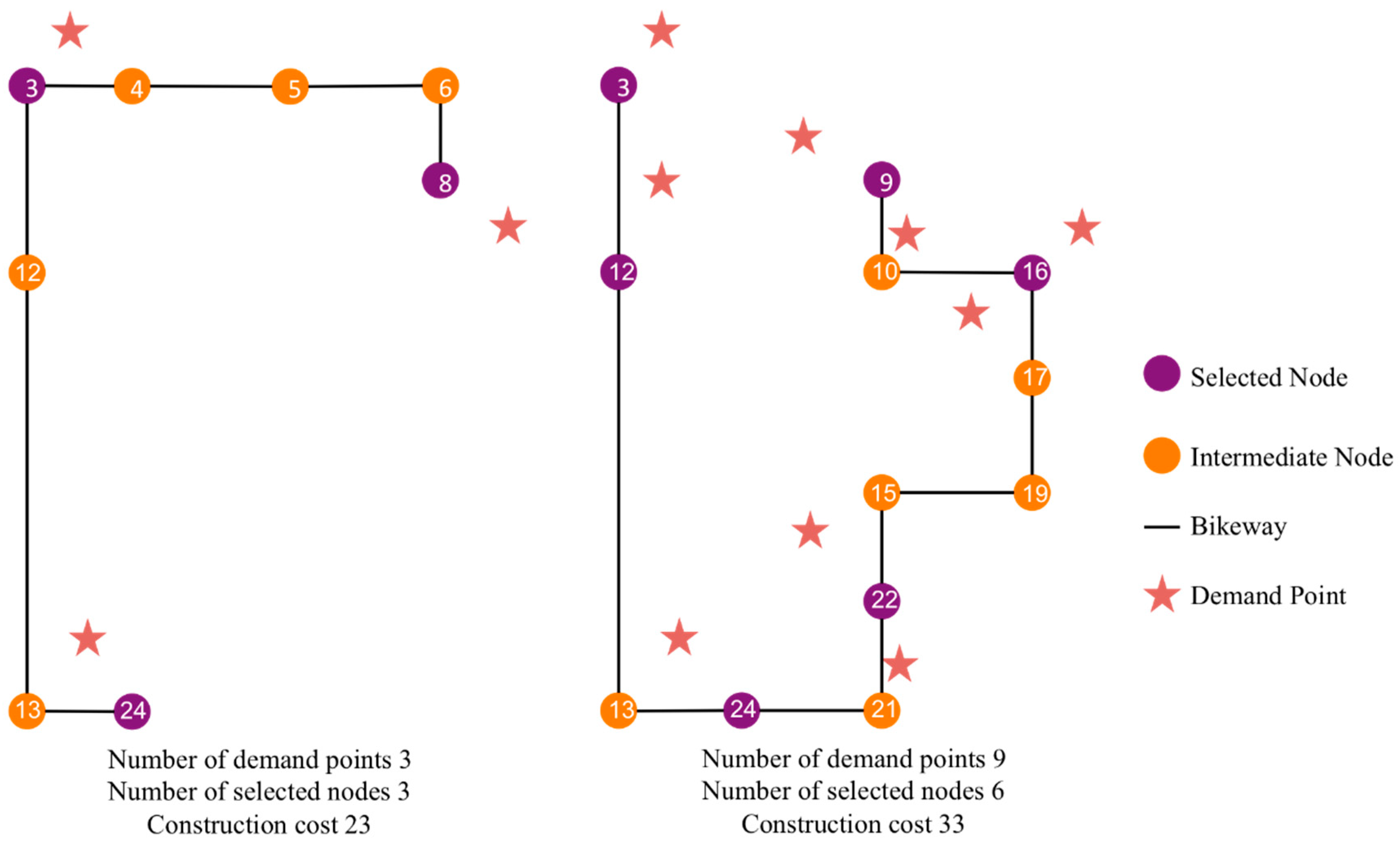
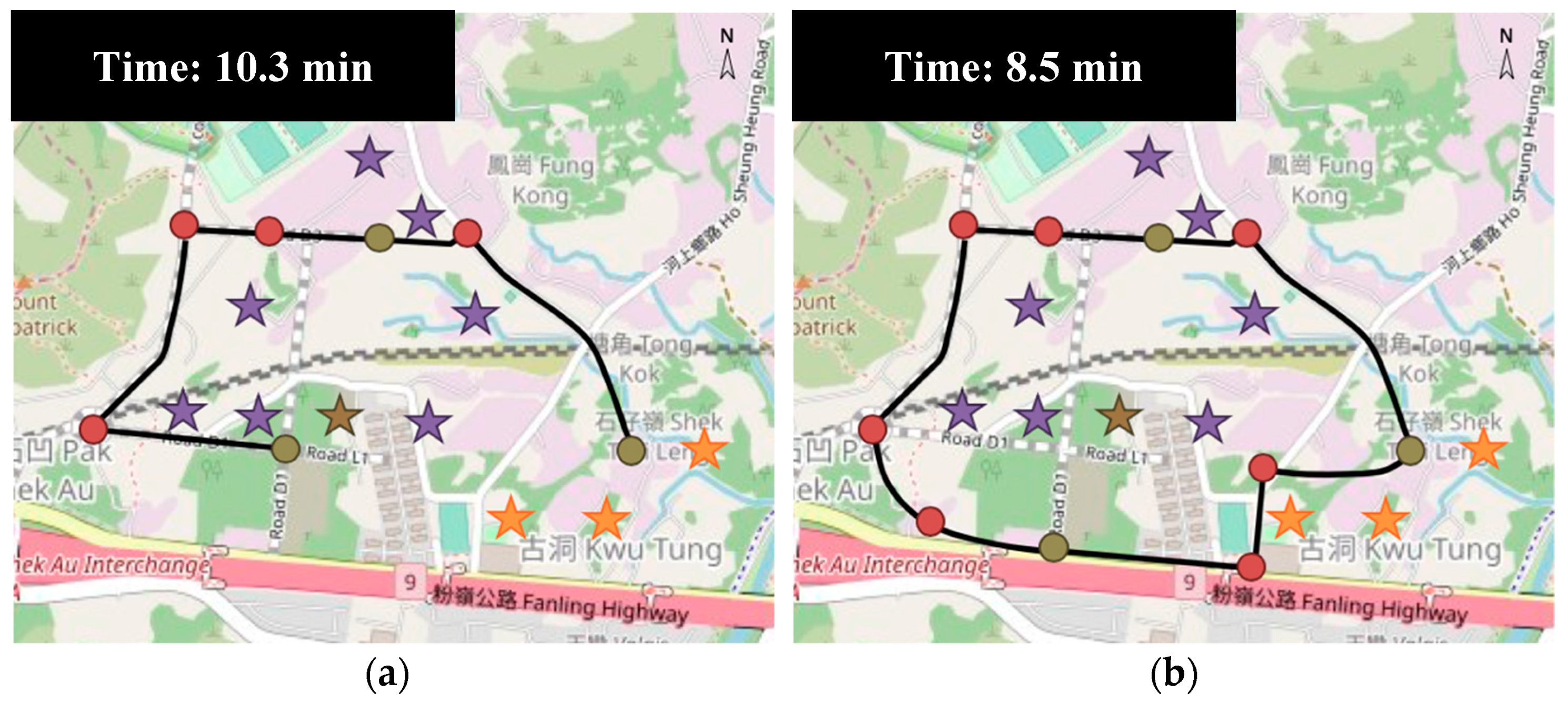
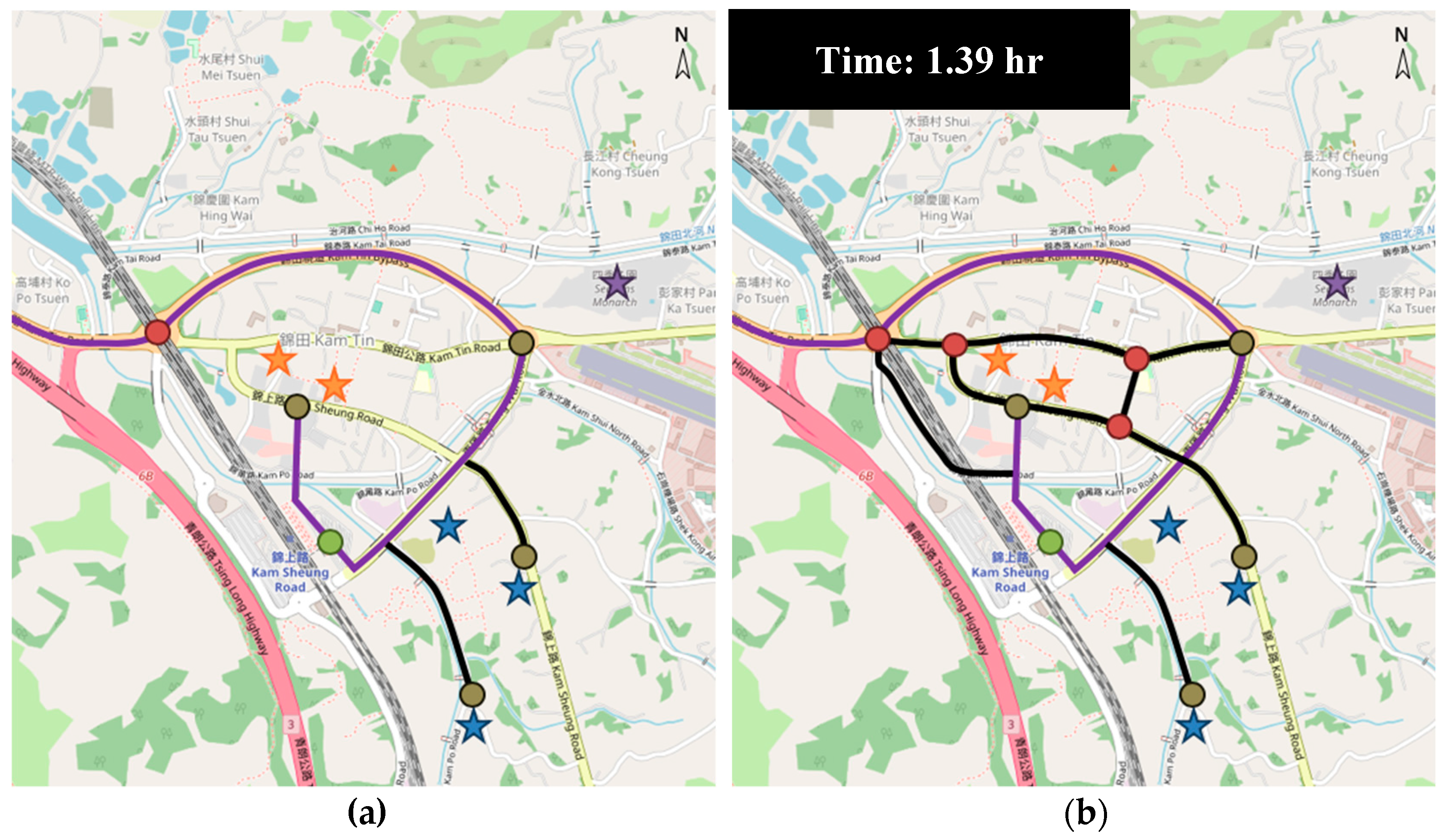
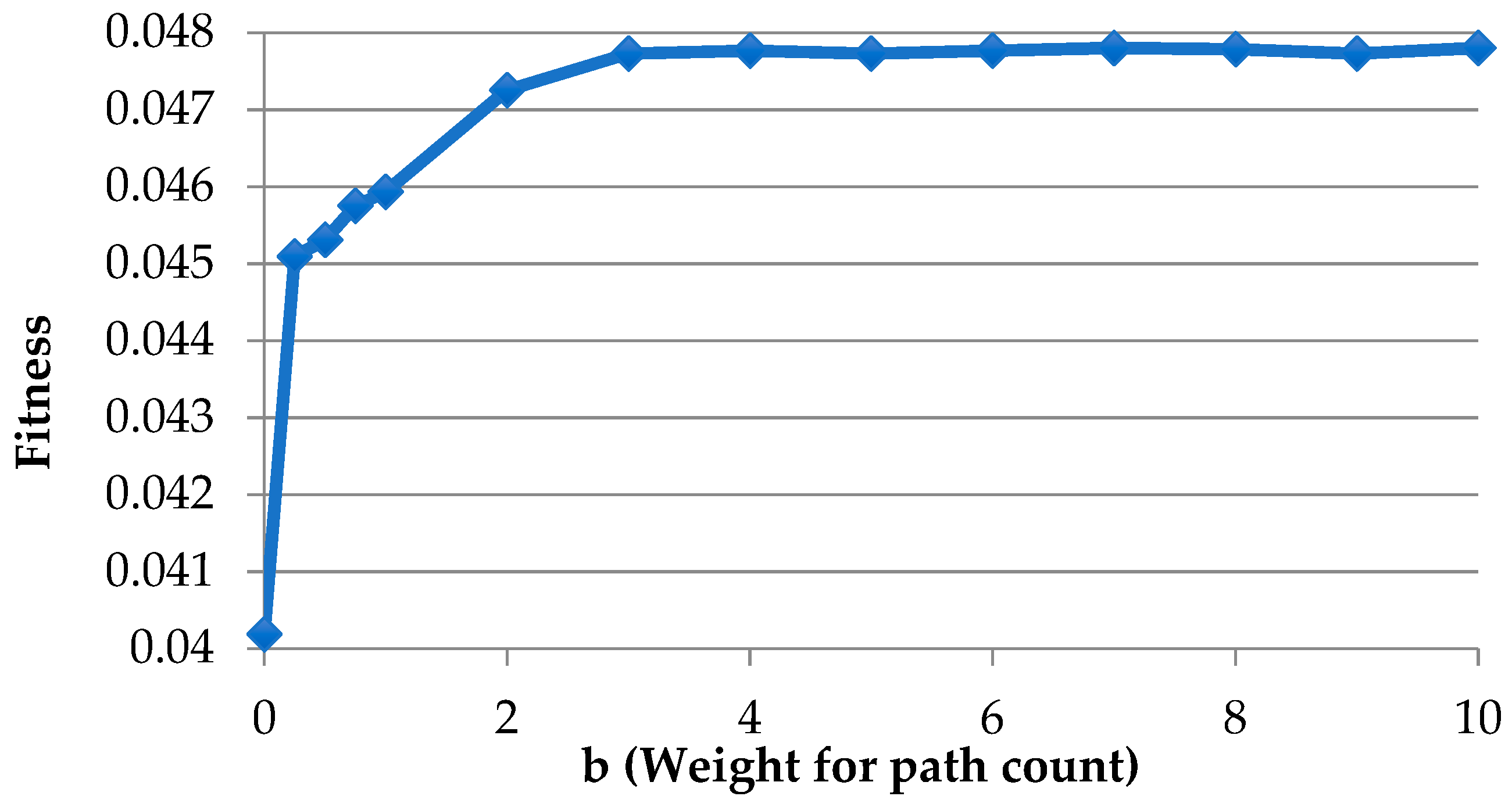
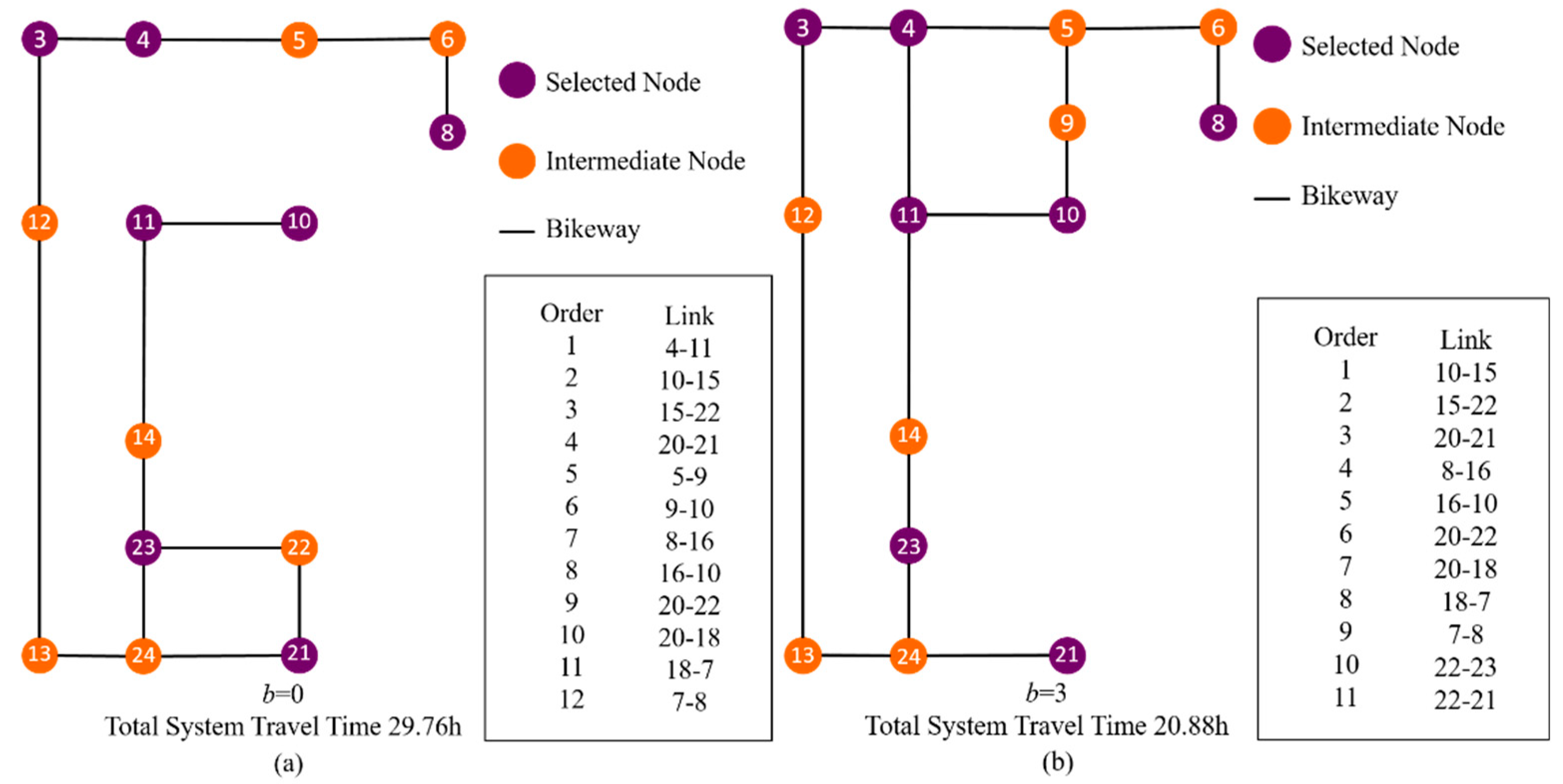
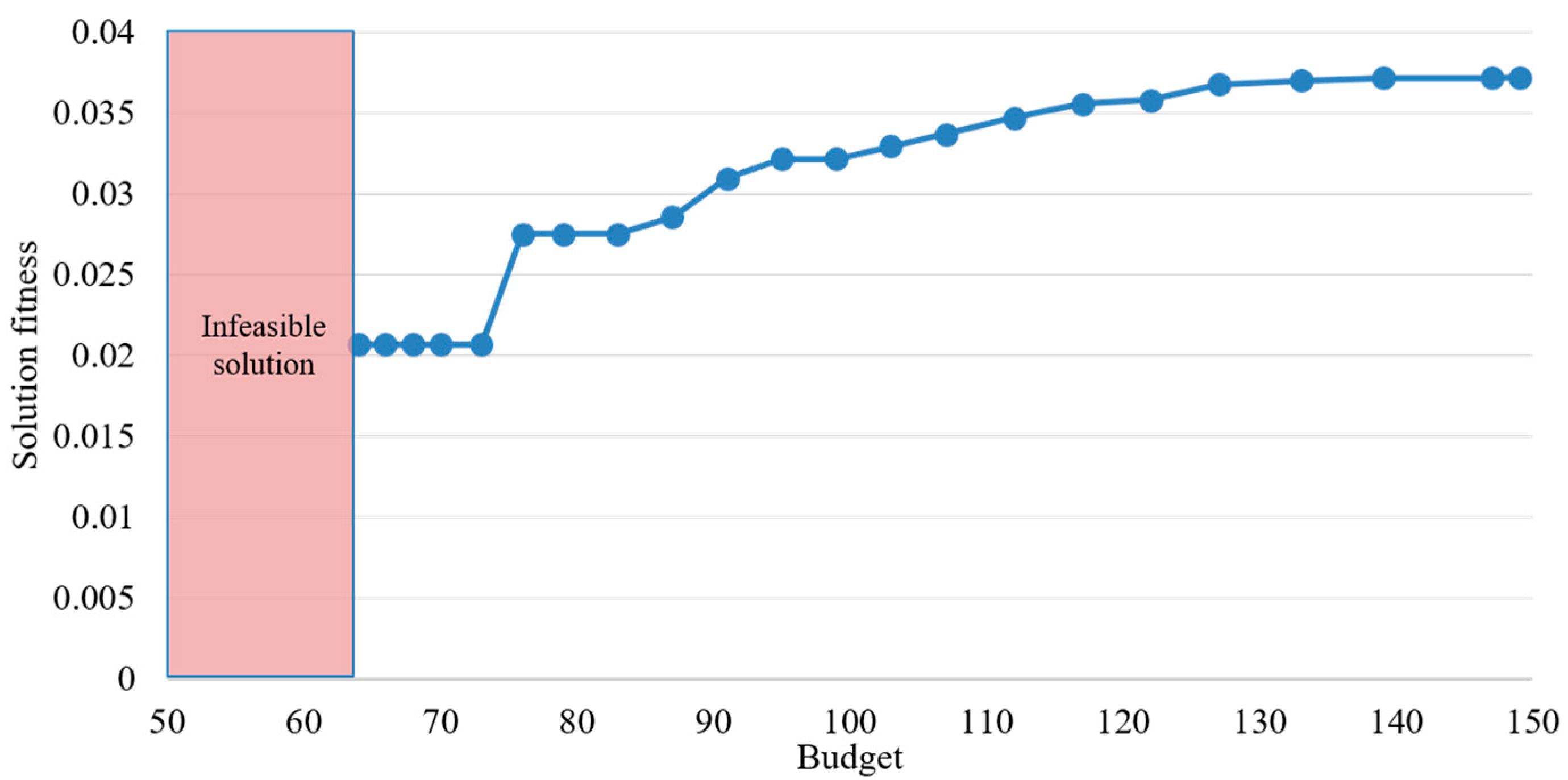
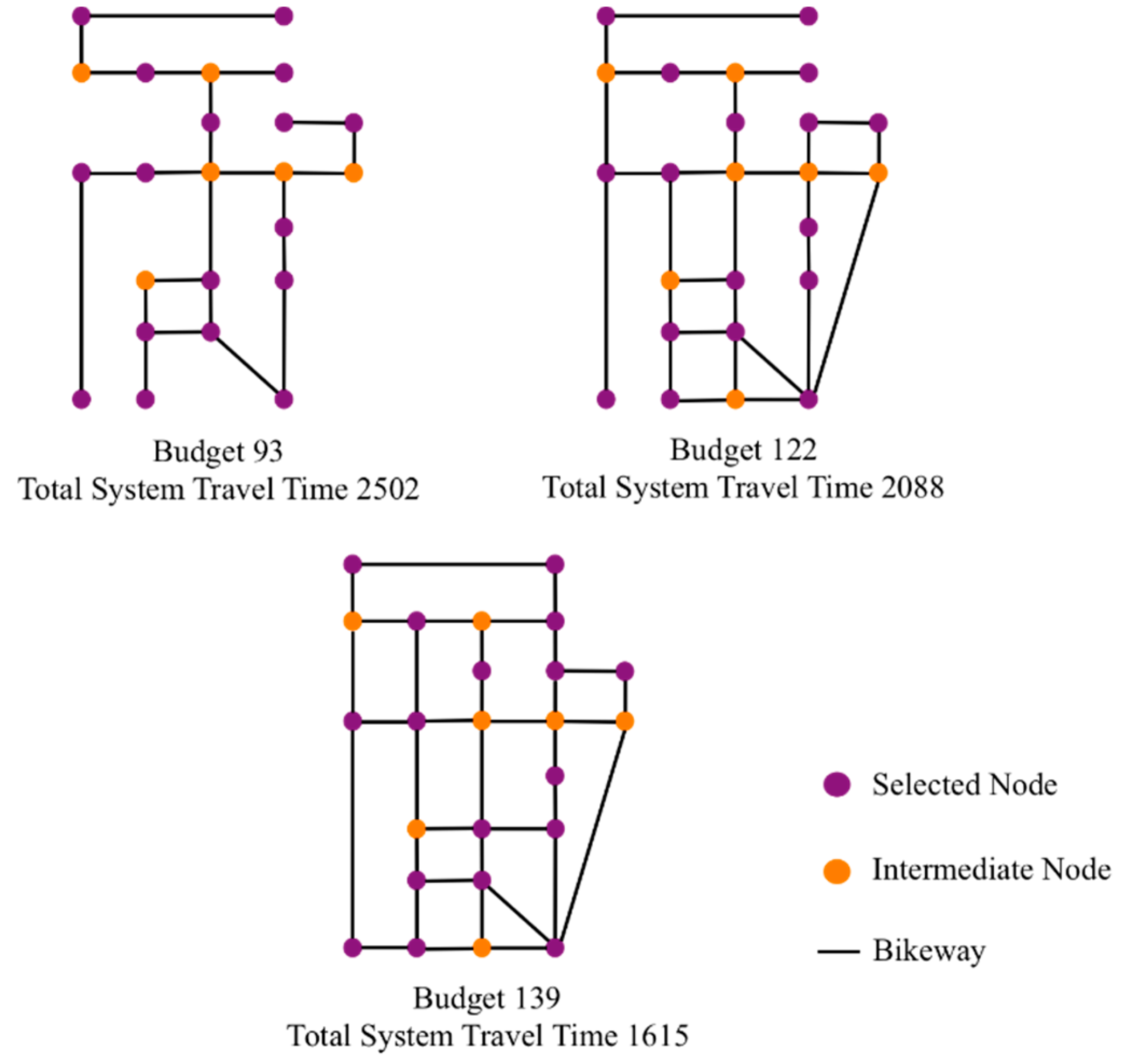
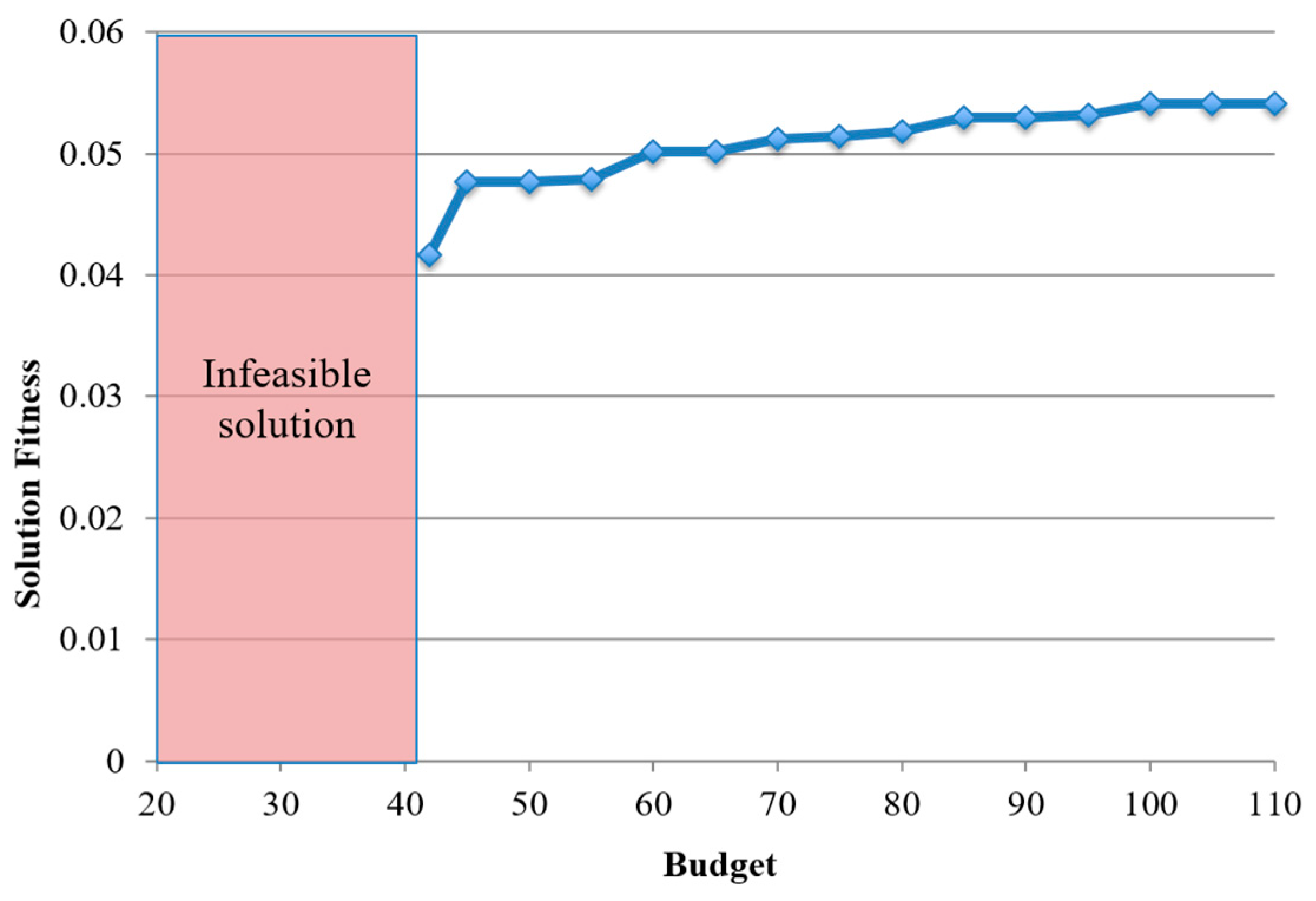
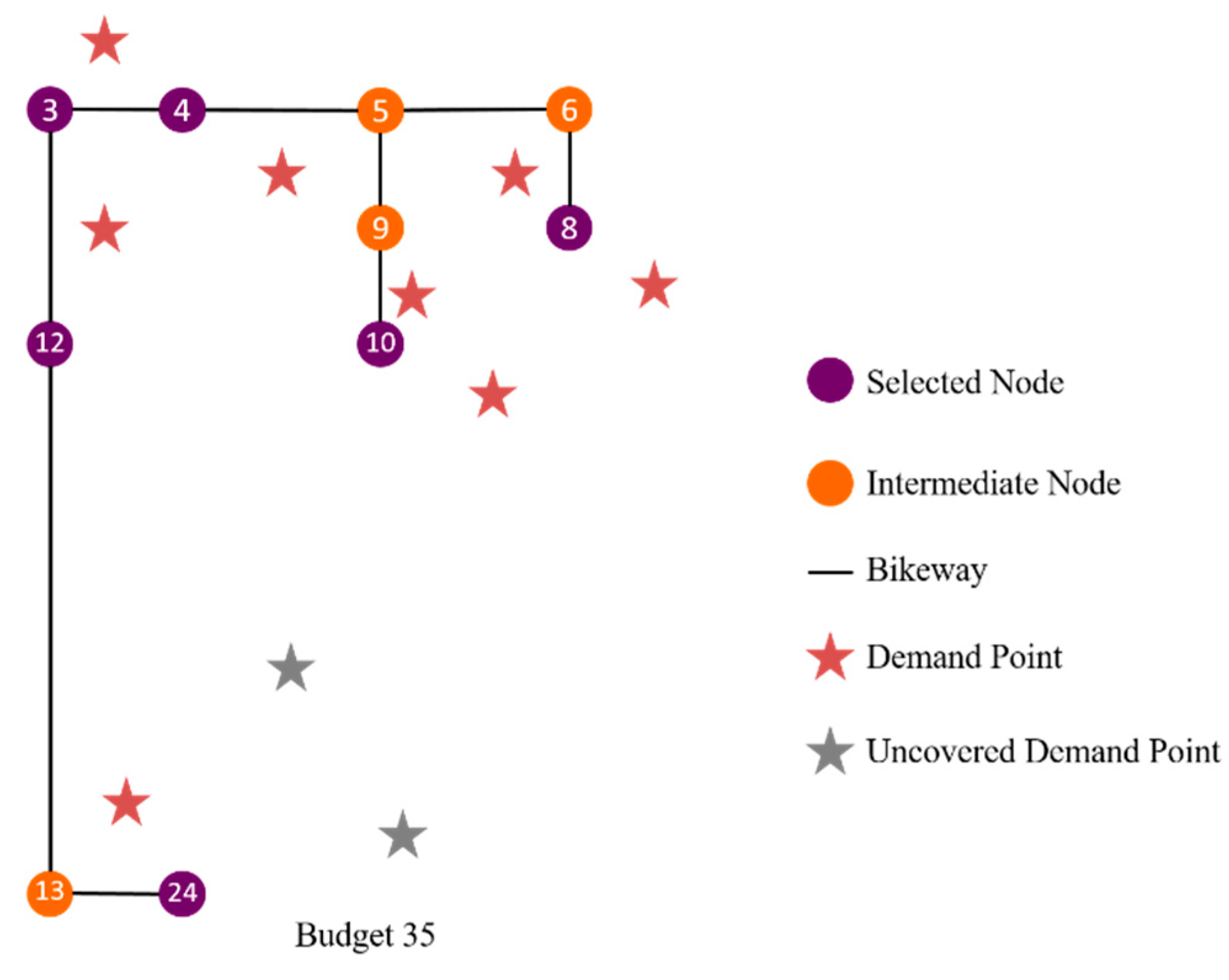
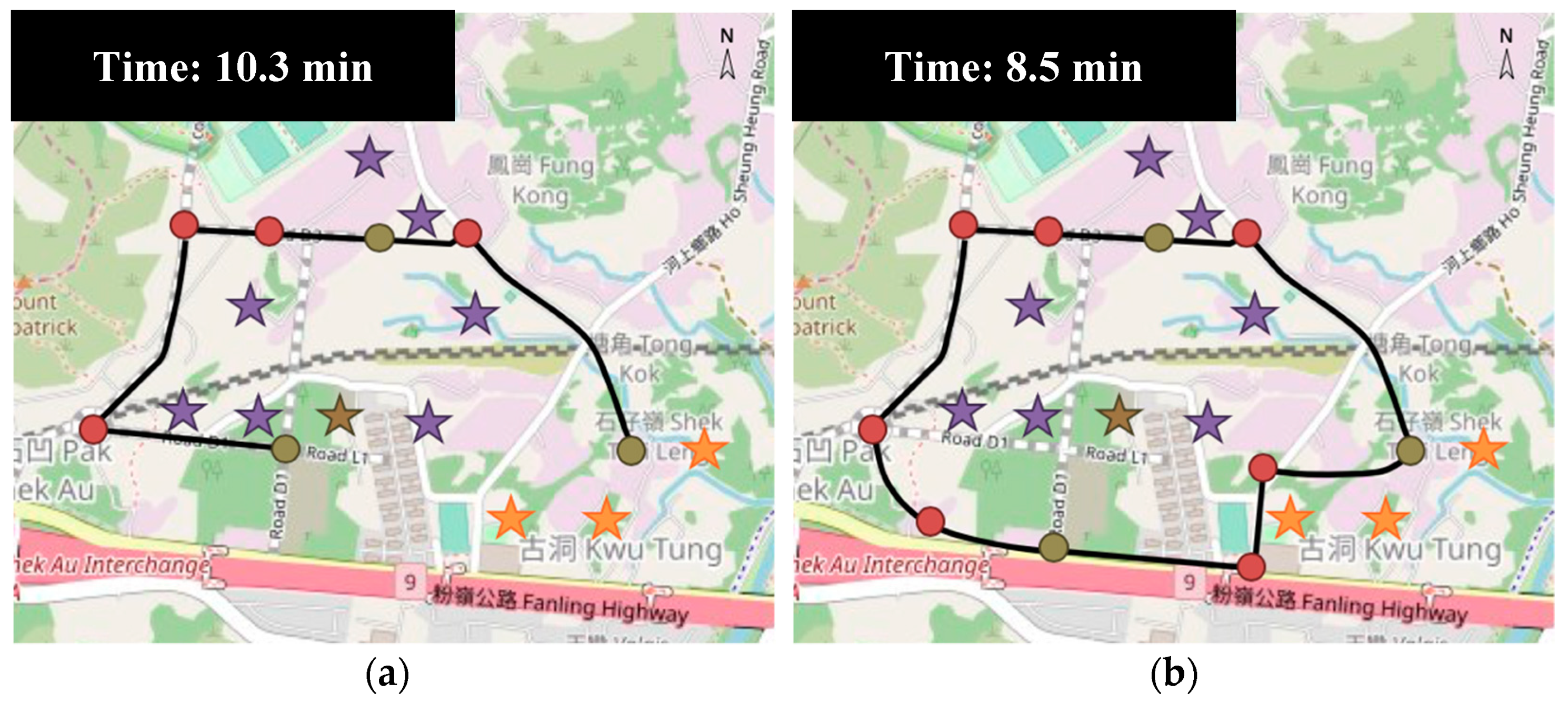
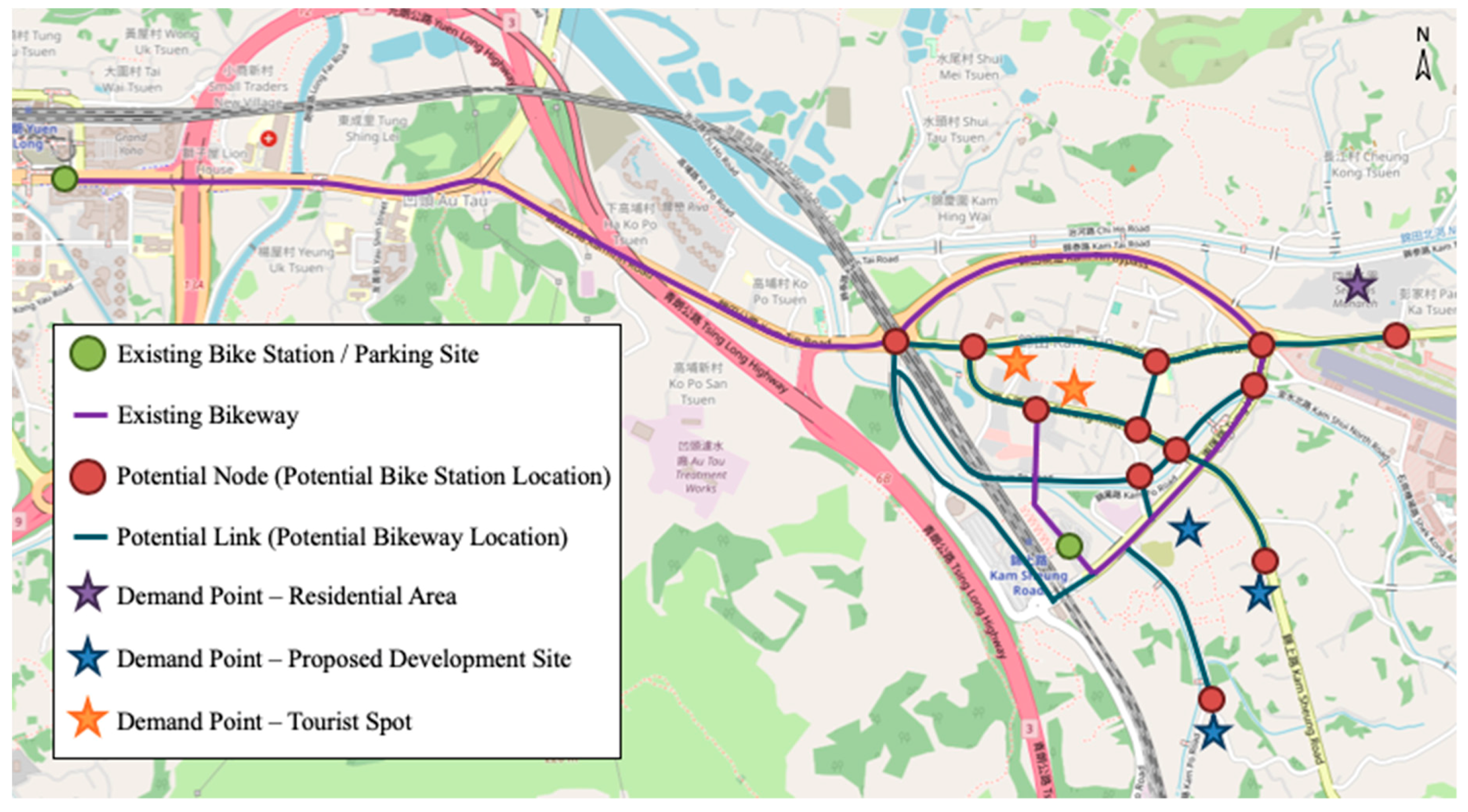
In spite of the significant role of bikeway in motivating cycling, there are very few existing bikeway network design models, and some design objectives and constraints have not been simultaneously taken into consideration. This study proposes a new bikeway network design problem that minimizes the total system travel time between a set of selected nodes under a budget constraint, in which all potential demands must be covered by the selected nodes and all selected nodes must be interconnected. An efficient two-step solution method is proposed to determine the selected node set and the bikeway layout separately. The genetic algorithm is employed to determine the selected node set that covers all demand points, while a novel elimination heuristic is employed to remove the bikeways between the shortest paths of the selected nodes (constructed by the shortest path algorithm) according to the elimination factor (which is a weighted sum of the setup cost and path count). Numerical studies showed that (1) the weights for elimination factors can significantly change the network layout and thus the solution quality; (2) a higher budget can change the network topology and improve the solution fitness whenever the selected node set is fixed or flexible; and (3) the construction cost increases with the number of demand points. The case studies in two Hong Kong new towns showed that the model can handle design problems with or without existing bikeways under various budget levels. This model can, therefore, be adapted to similar bike-sharing system designs because (1) it ensures that the resultant bike station locations have complete demand coverage, (2) all bike stations can be well-connected by the bikeway network, and (3) the designed network can satisfy the budget constraint. Furthermore, the model is not only applicable to new system designs but can also capture the existence of built bikeways and bike stations for system expansion.
Future research could be done in the following directions. First, other design constraints or measures, such as BLOS, could be included in the model. Second, the model assumes that the demand between every demand point pair is identical, while it can be relaxed in future studies by considering varying demand levels of all demand sources, elastic travel demand with respect to travel time, or uncertainties between the selected nodes. Third, the bikeway setup cost is assumed to be proportional to the length of links only, but it can also be influenced by other factors, such as the type of bikeway (e.g., exclusive bikeway, shared bikeway with vehicle roadway) and pavement type. Future studies can be extended to multi-type bikeway design problems. Fourth, the generalized travel cost of each bikeway can include other attributes in addition to travel time, including the number of turns and intersections, the percentage of greening, and the provision of cycling facilities along with a candidate link. Moreover, the route choice behavior of the cyclists can be remodeled by including other route choice attributes (such as traffic flow of automobile on the edges) or using other mathematical forms such as the bi-objective model [
28]. Finally, the Genetic Algorithm used in the two-stage solution method can be replaced by other new meta-heuristics or hybrid meta-heuristics, such as the Artificial Bee Colony algorithm, Tabu Search, or Large Neighborhood Search. Comparative studies can be carried out to determine which of the solution methods has a higher computation efficiency.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}