Resonance Detection Strategy for Multi-Parallel Inverter-Based Grid-Connected Renewable Power System Using Cascaded SOGI-FLL


Abstract
1. Introduction
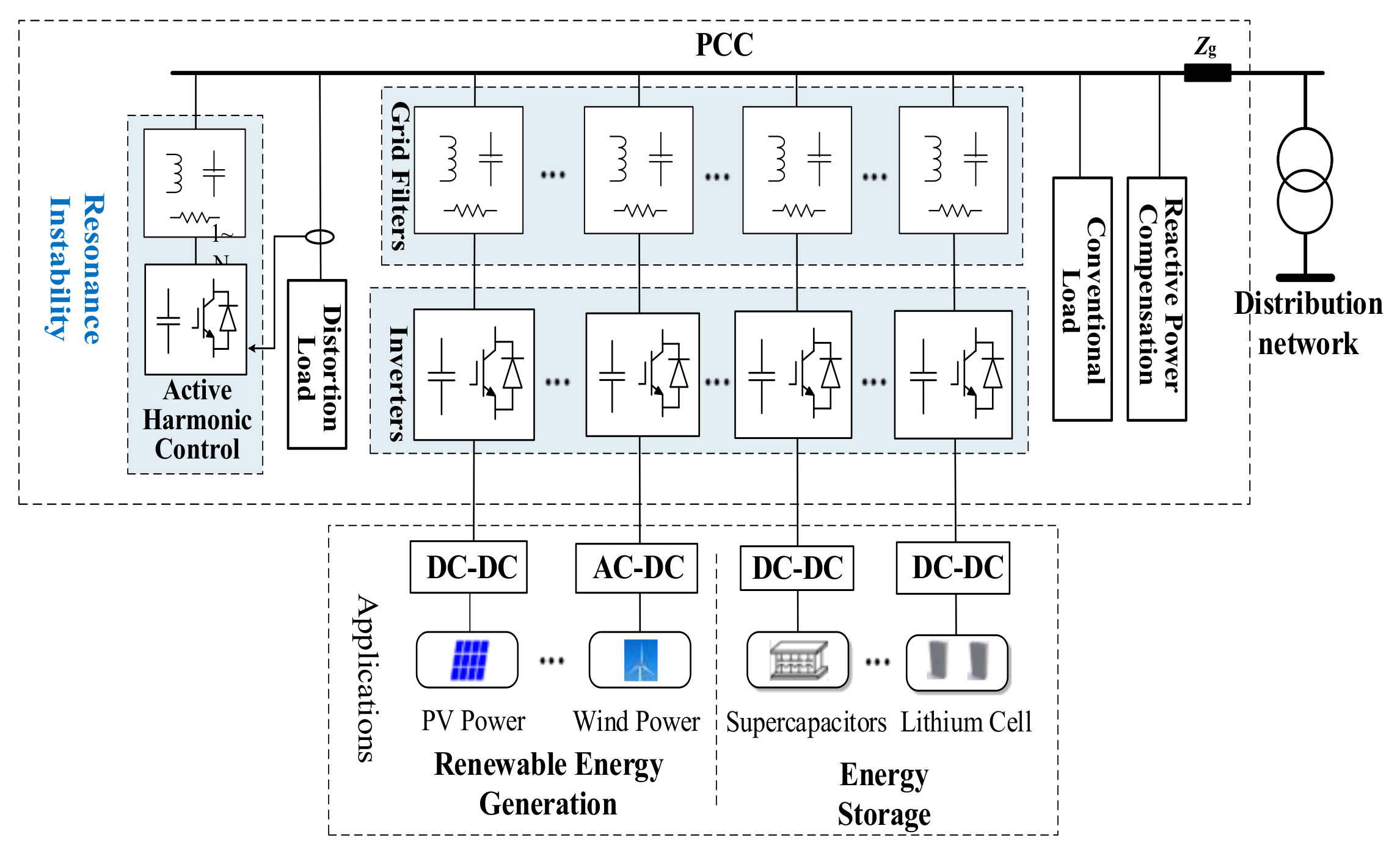
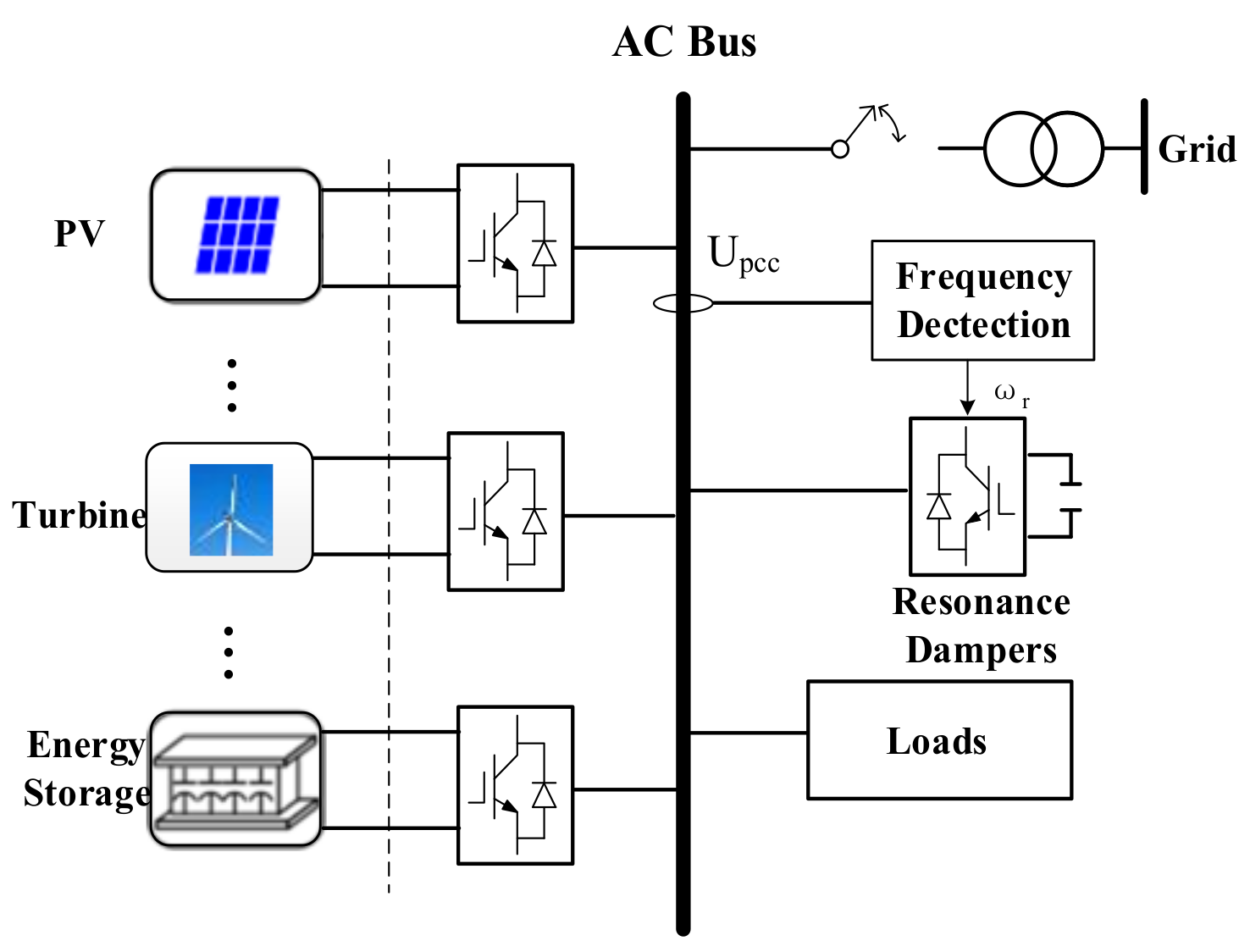
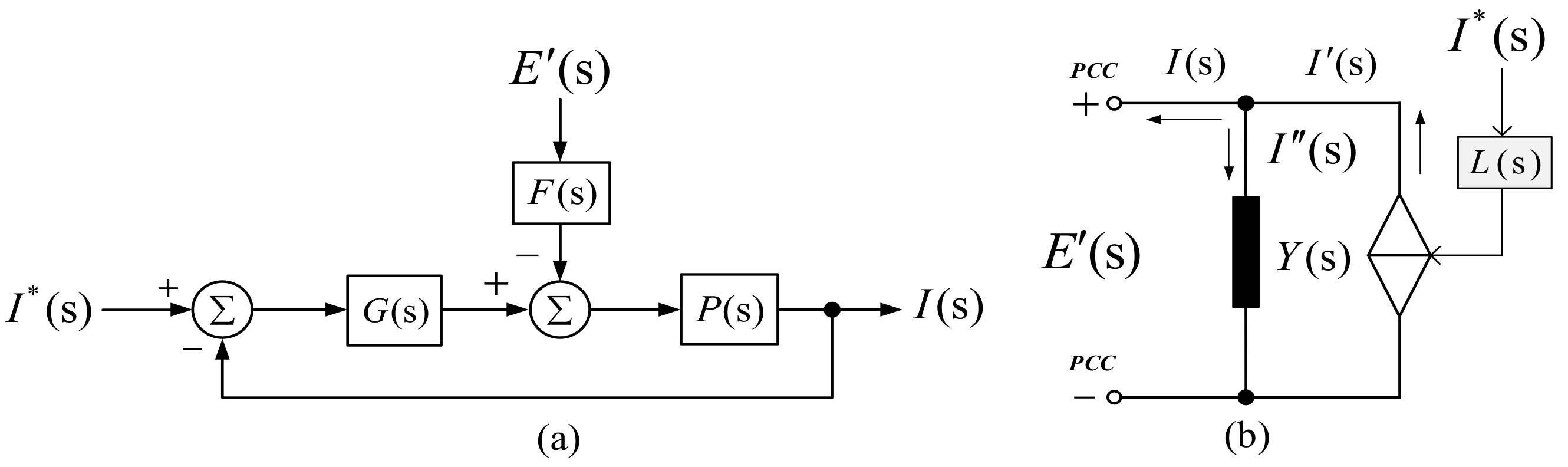
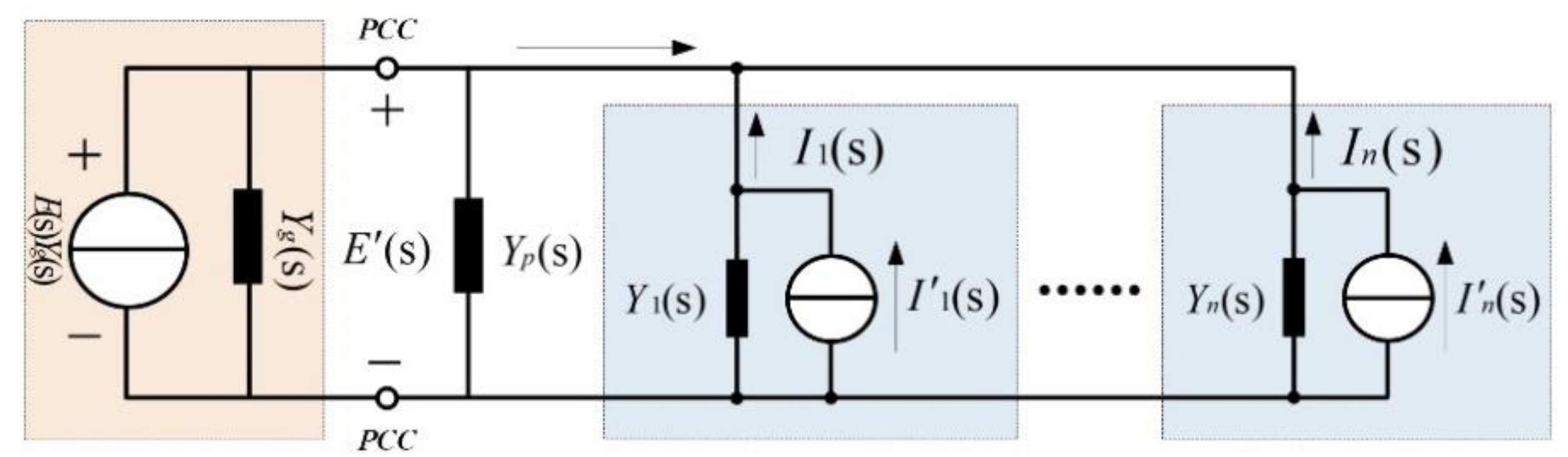
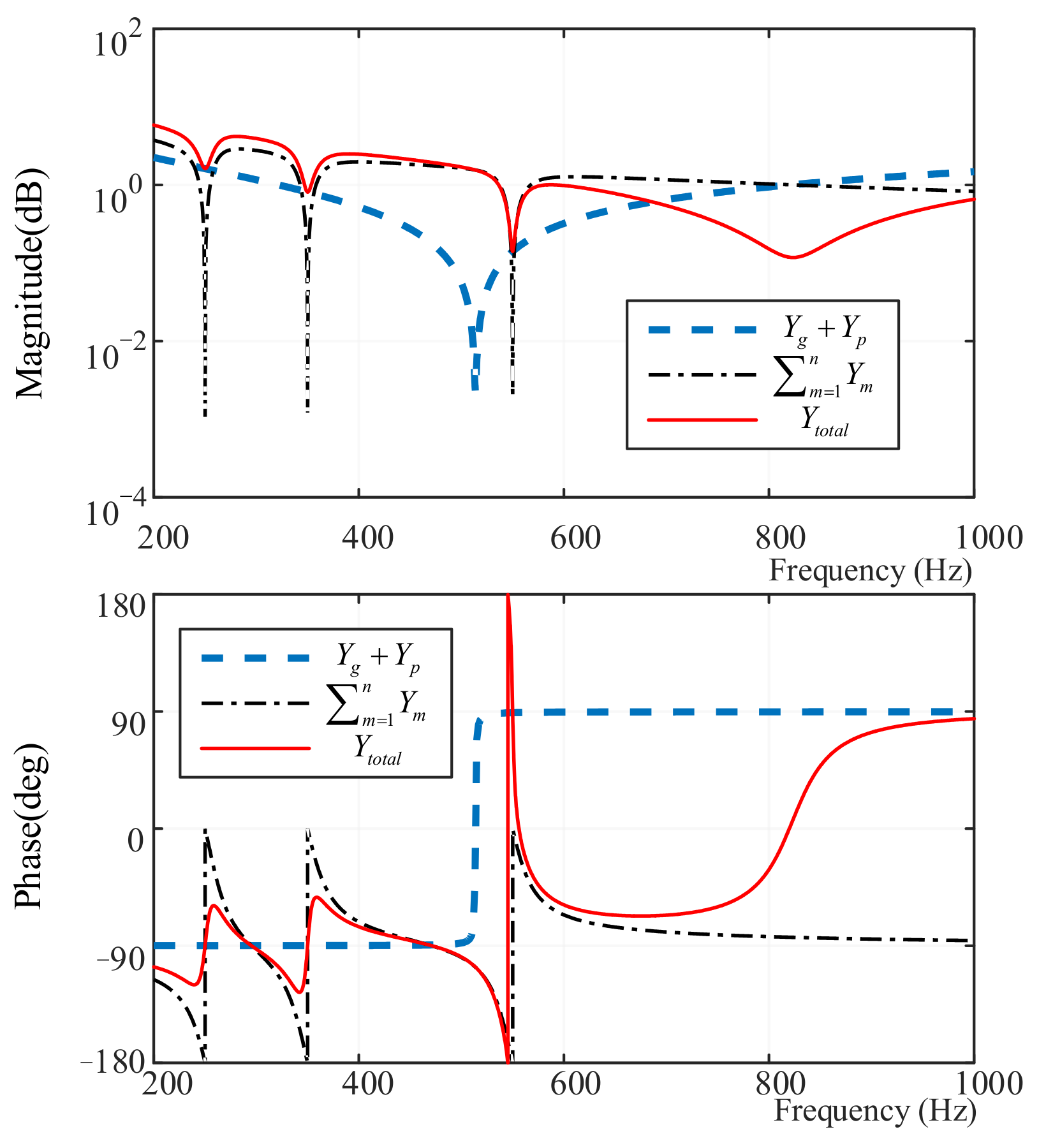
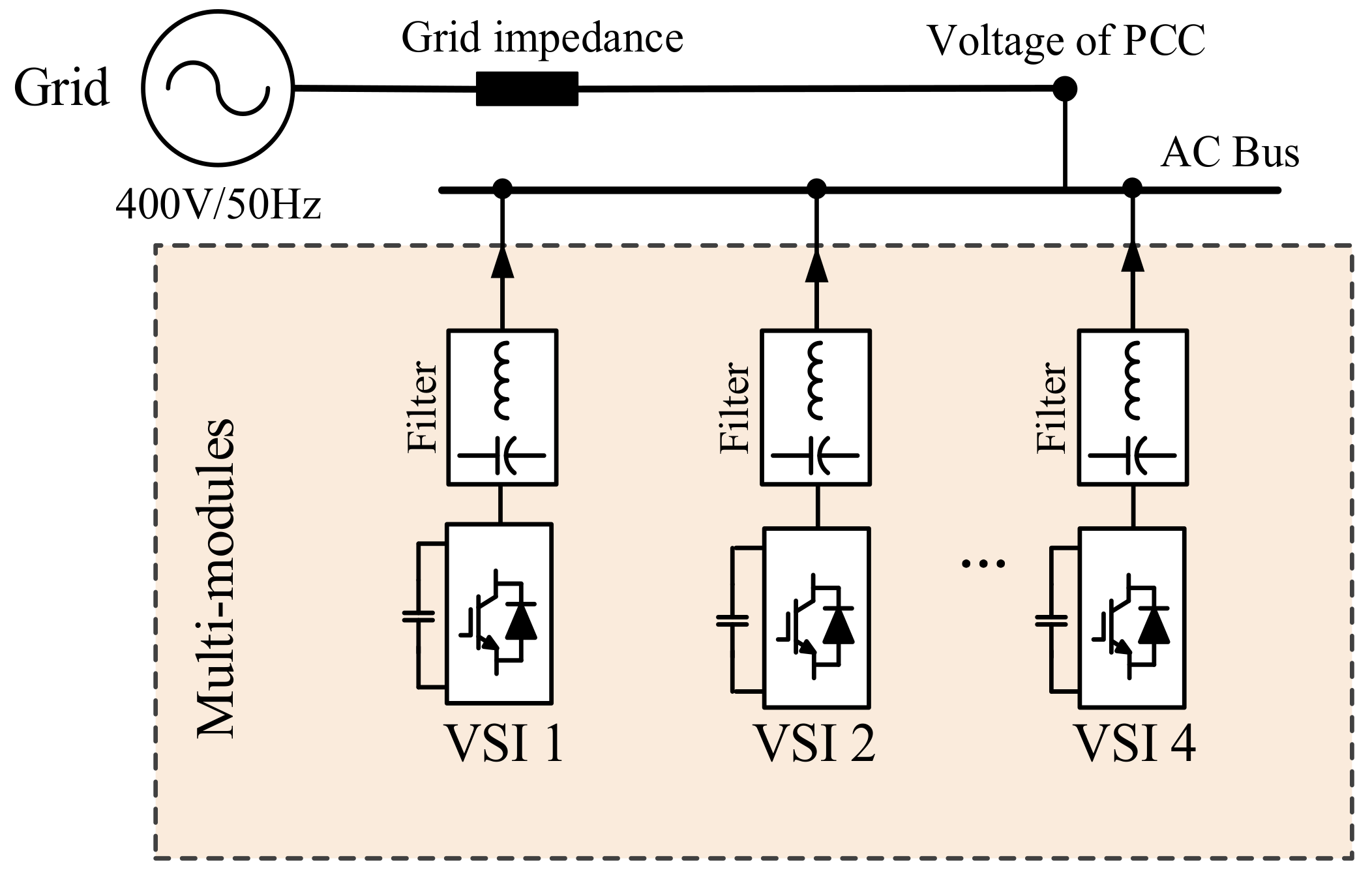
2. Modeling and Analysis of Multi-Parallel Inverters System
3. The Proposed Cascaded Second-Order Generalized Integrator-Frequency Locked Loop (SOGI-FLL)-Based Resonance Detection Method
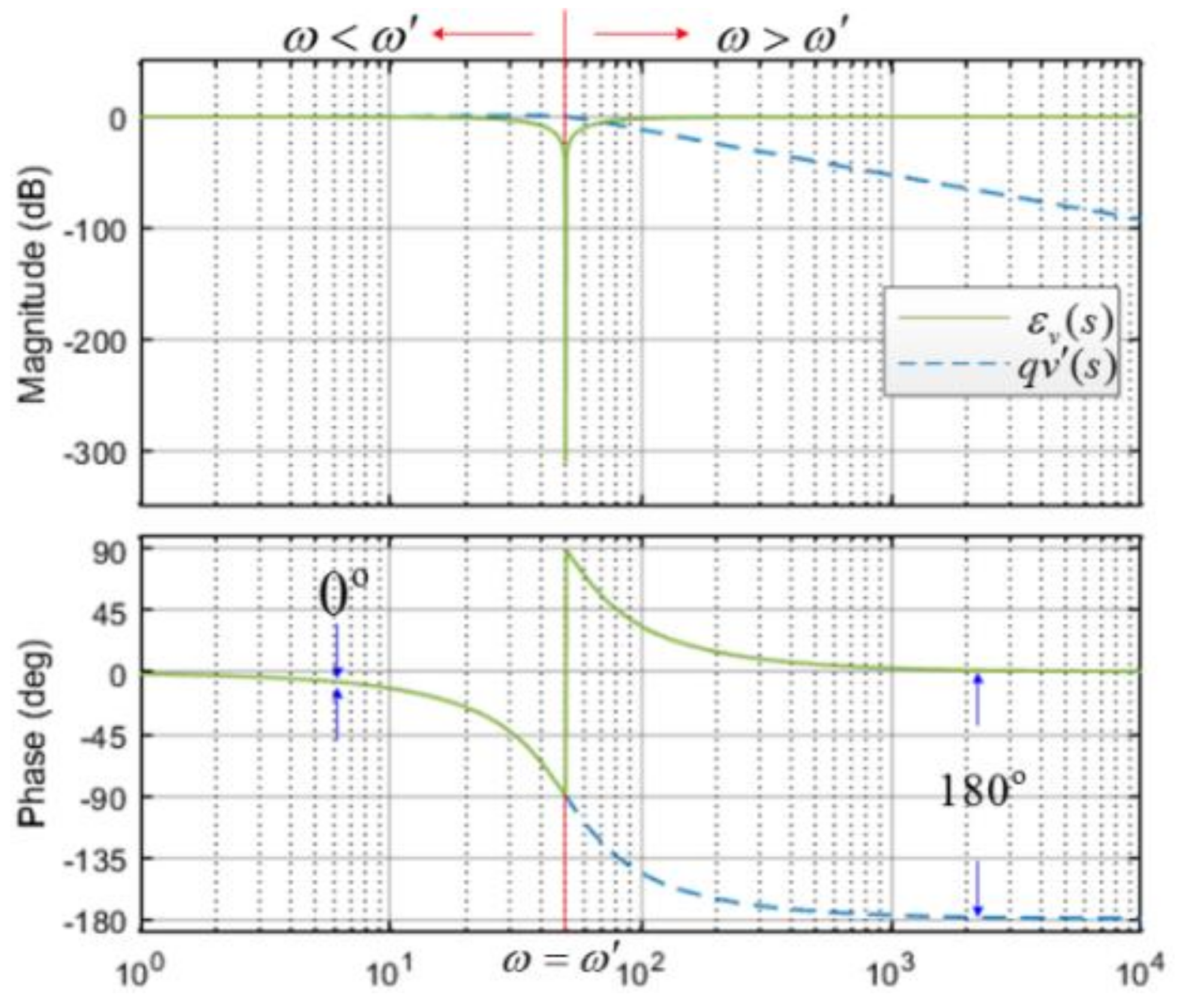
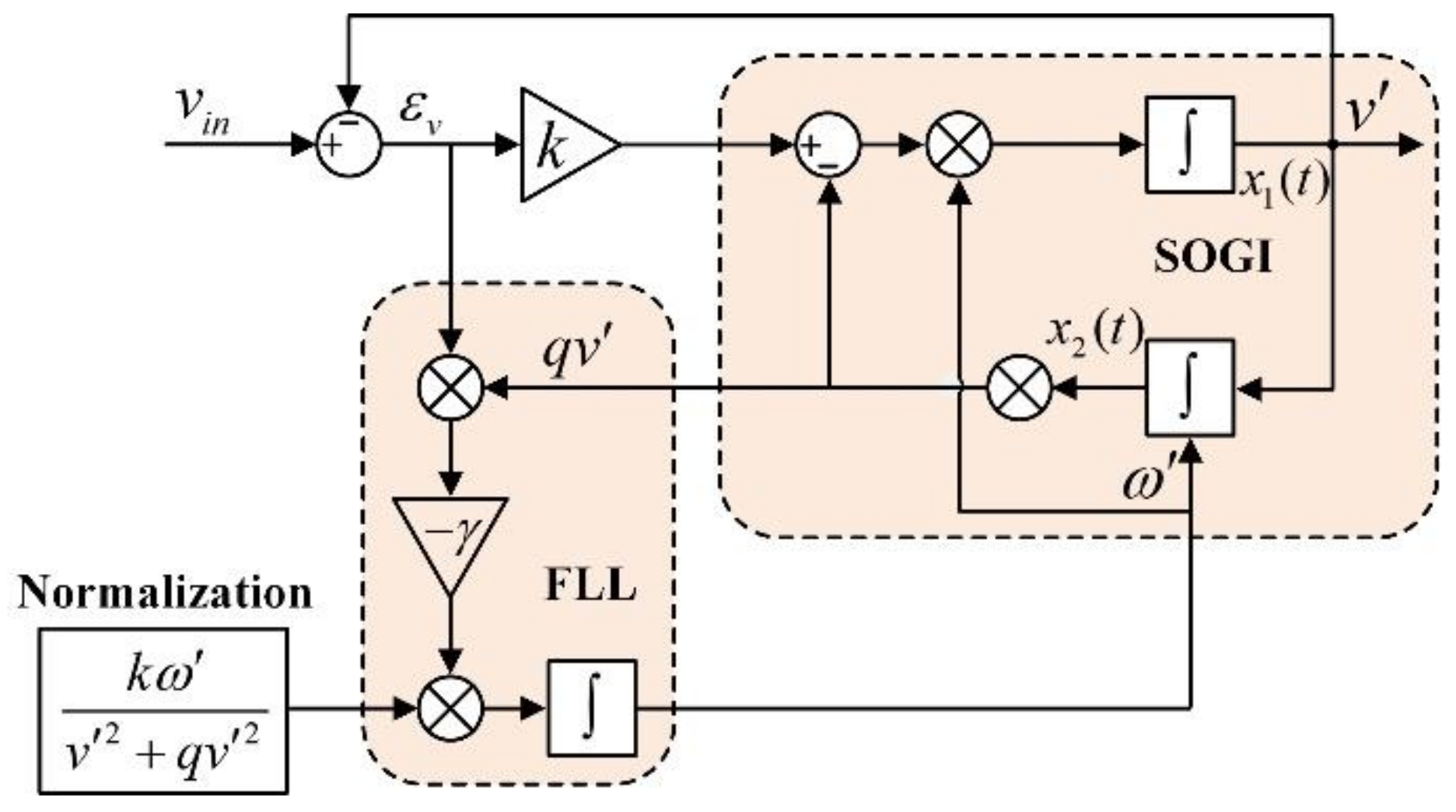
3.1. Frequency Self-Adaptive SOGI-FLL
3.2. Mathematical Description of SOGI-FLL
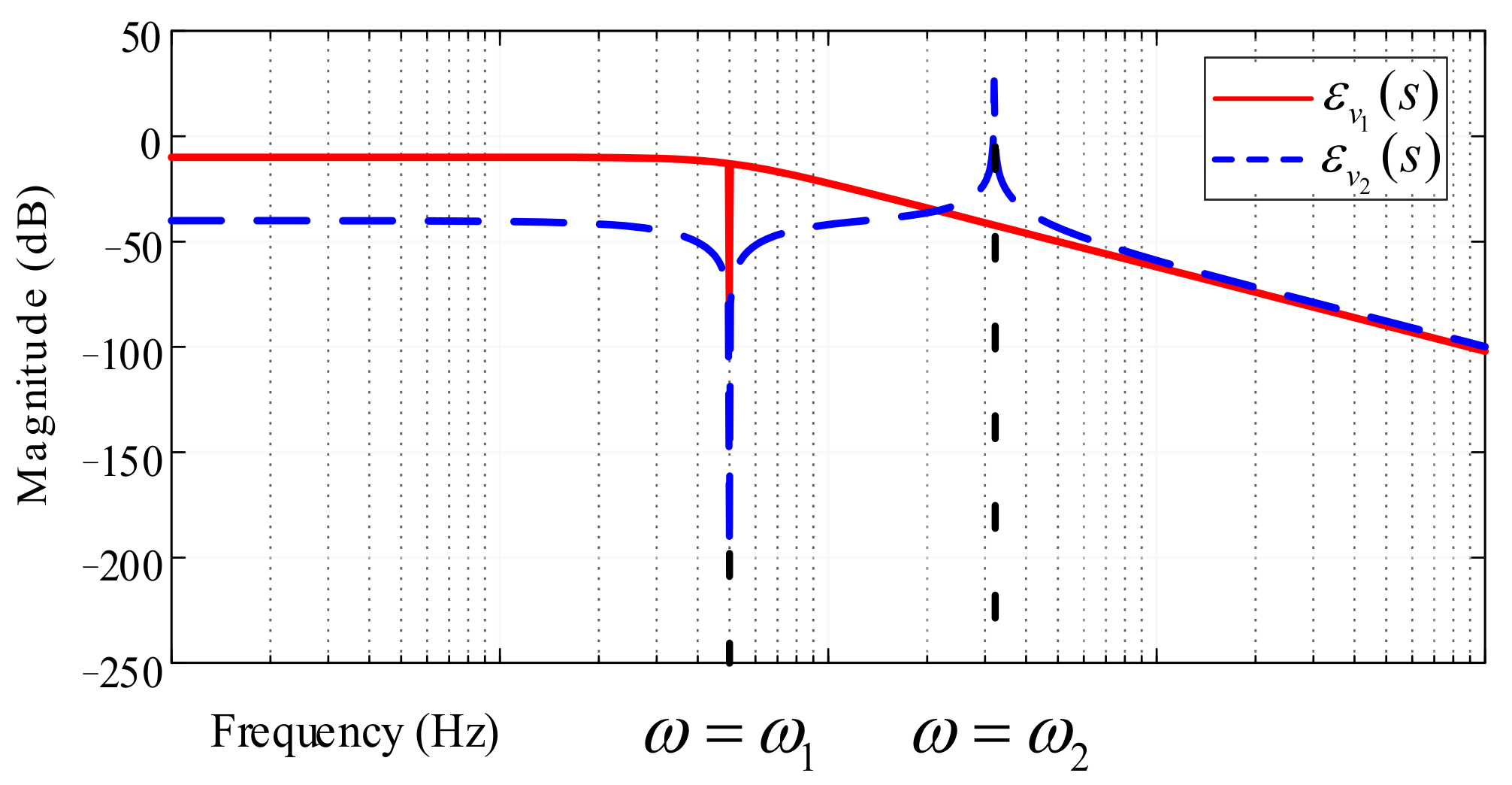
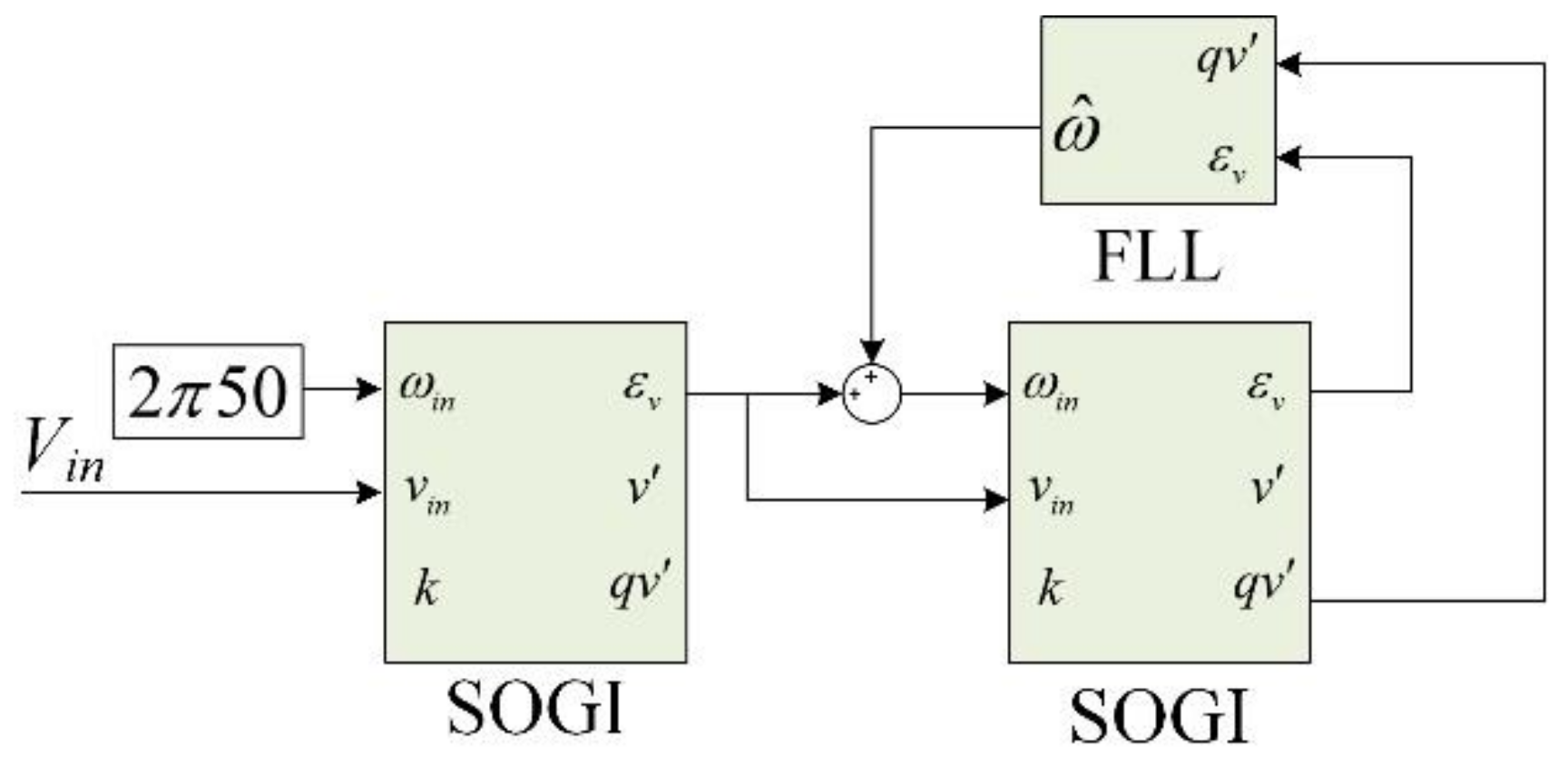
3.3. The Proposed Cascaded and Normalized SOGI-FLL Strategy
4. Simulation and HIL-Based Emulation Results
4.1. MATLAB-Based Simulation Results
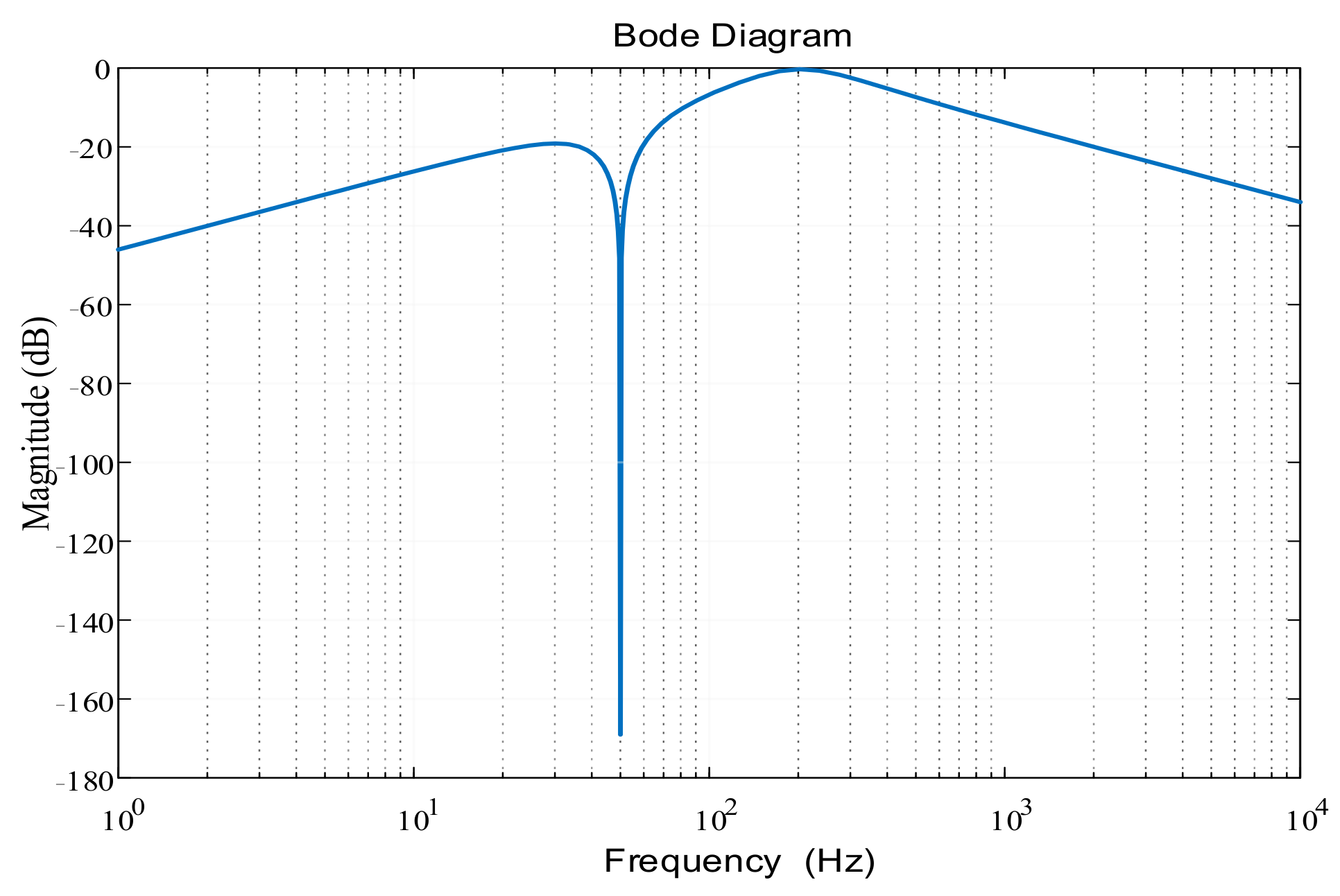
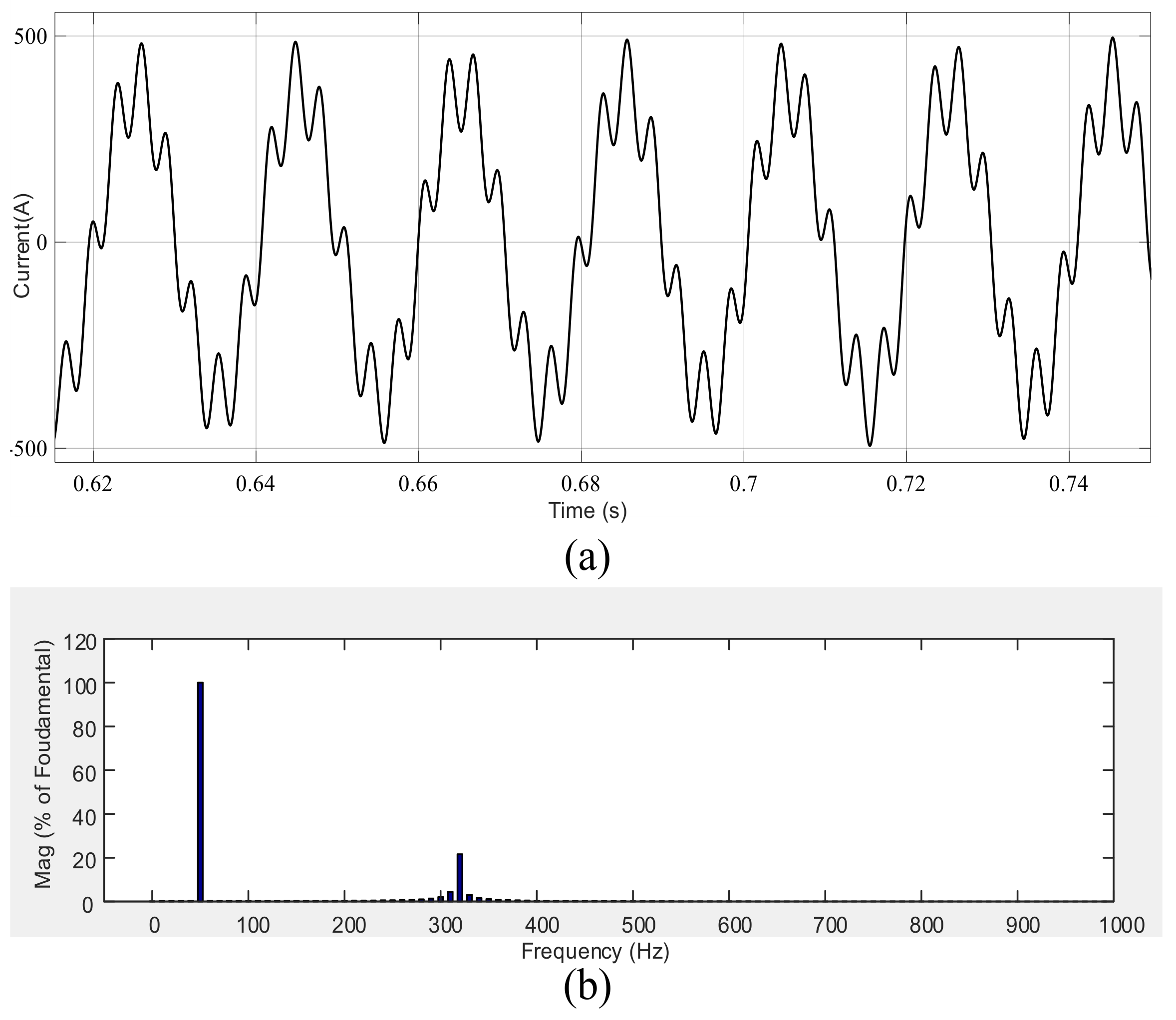
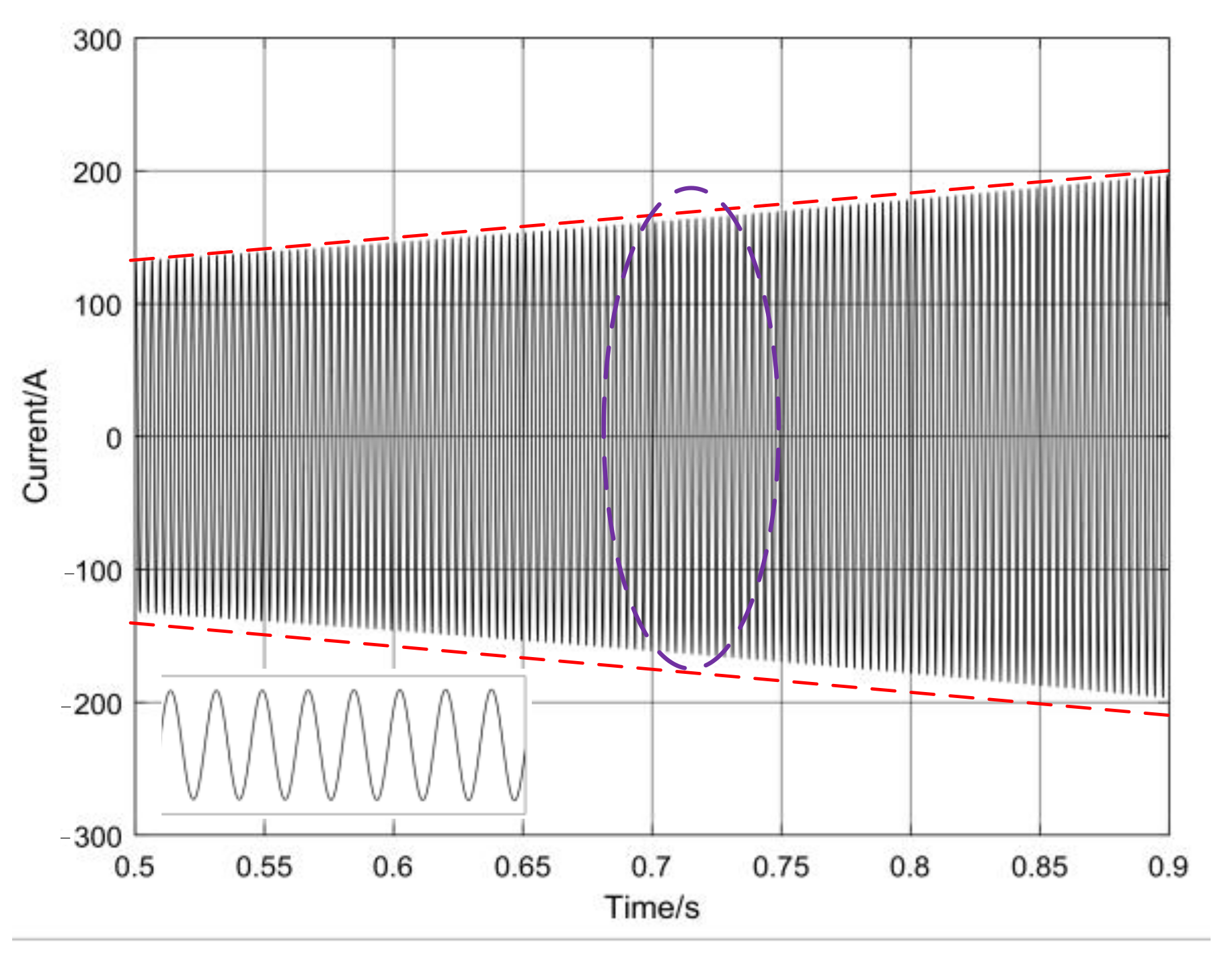
4.1.1. Resonance Extraction Effect Validation
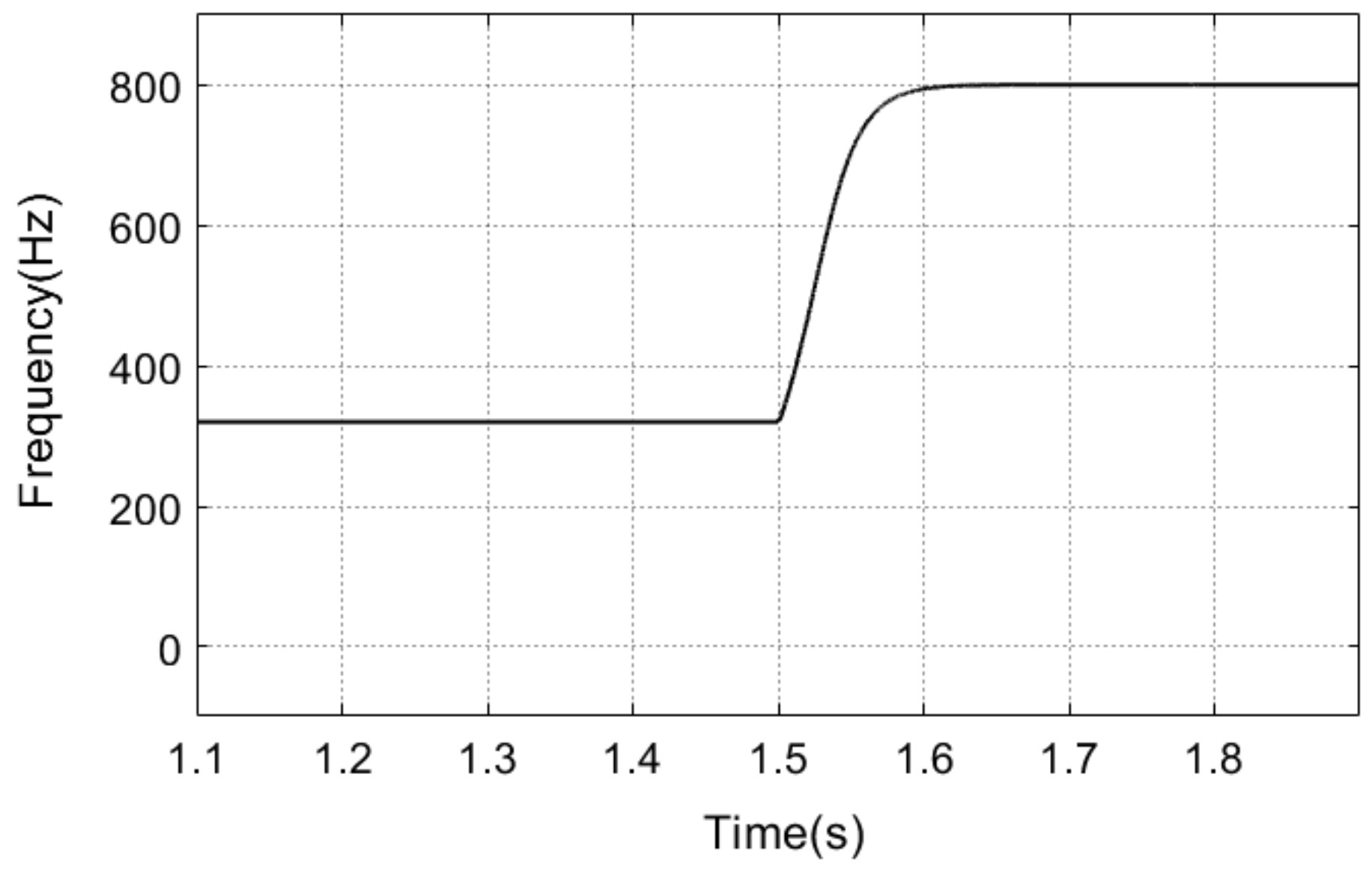
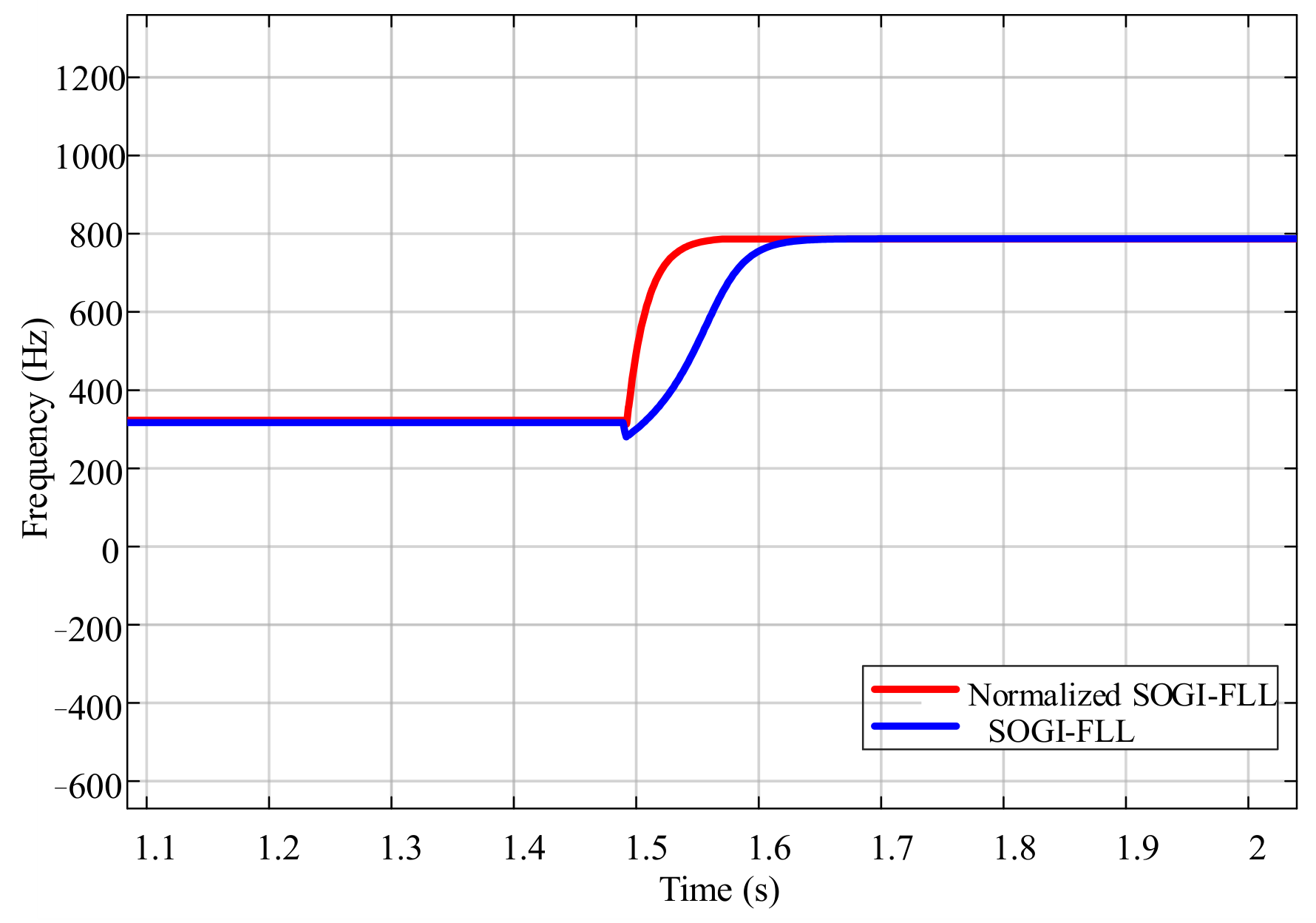
4.1.2. Comparison of Detection Speed
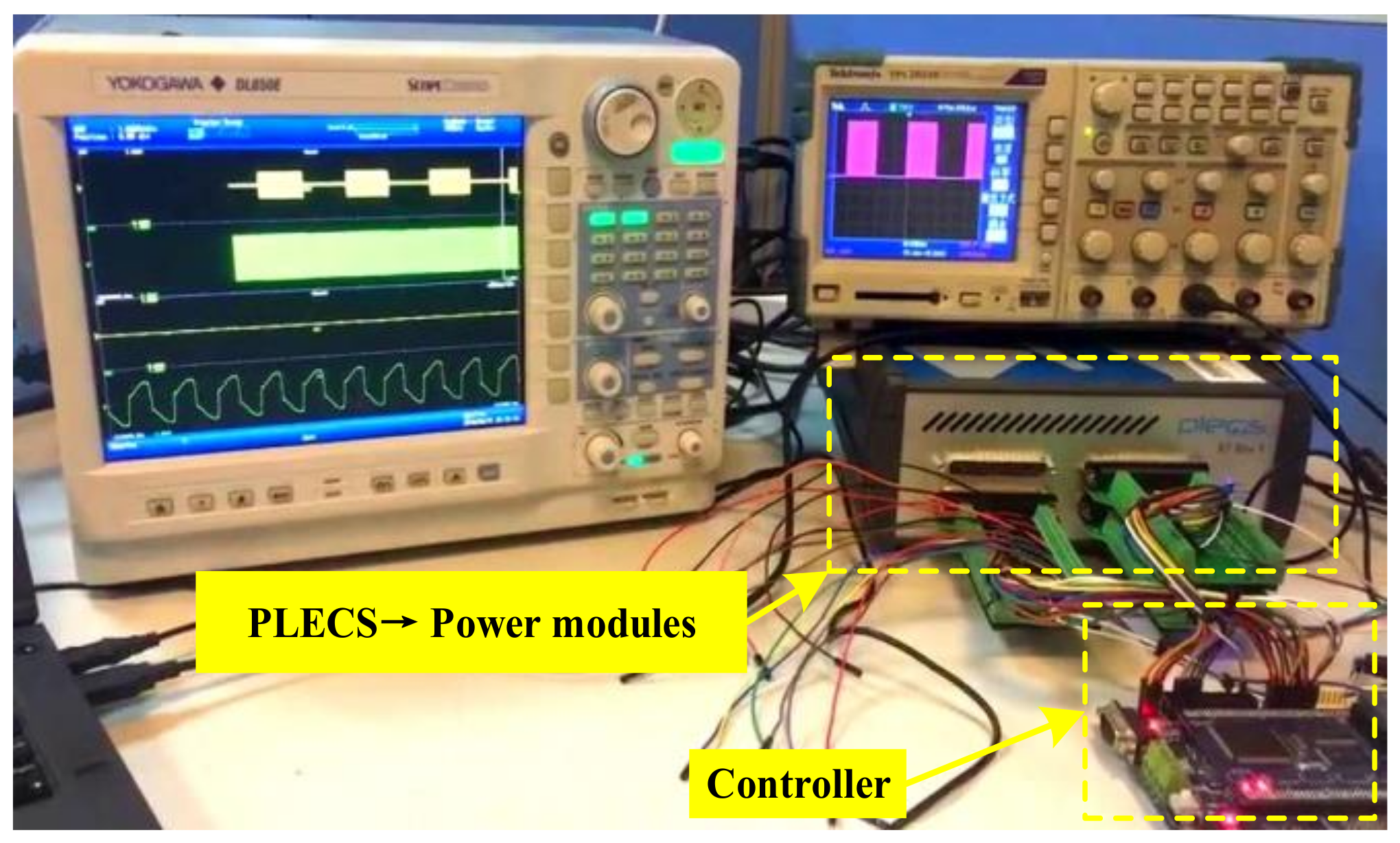
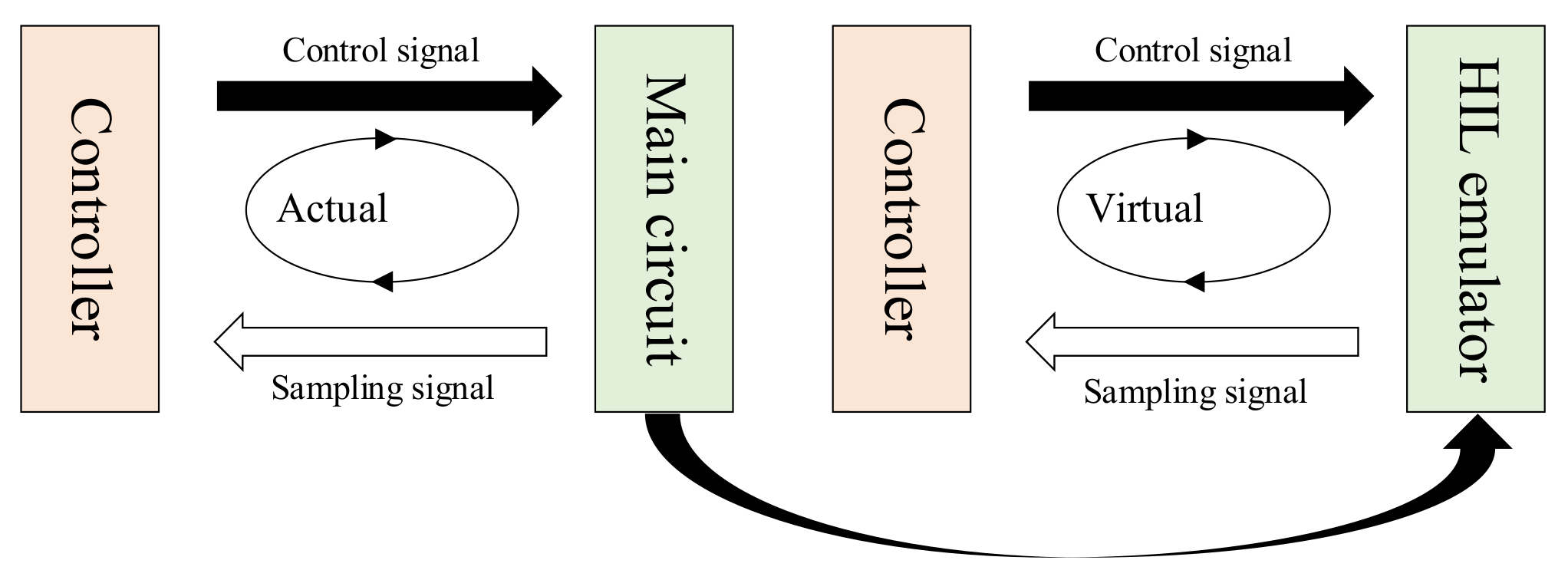
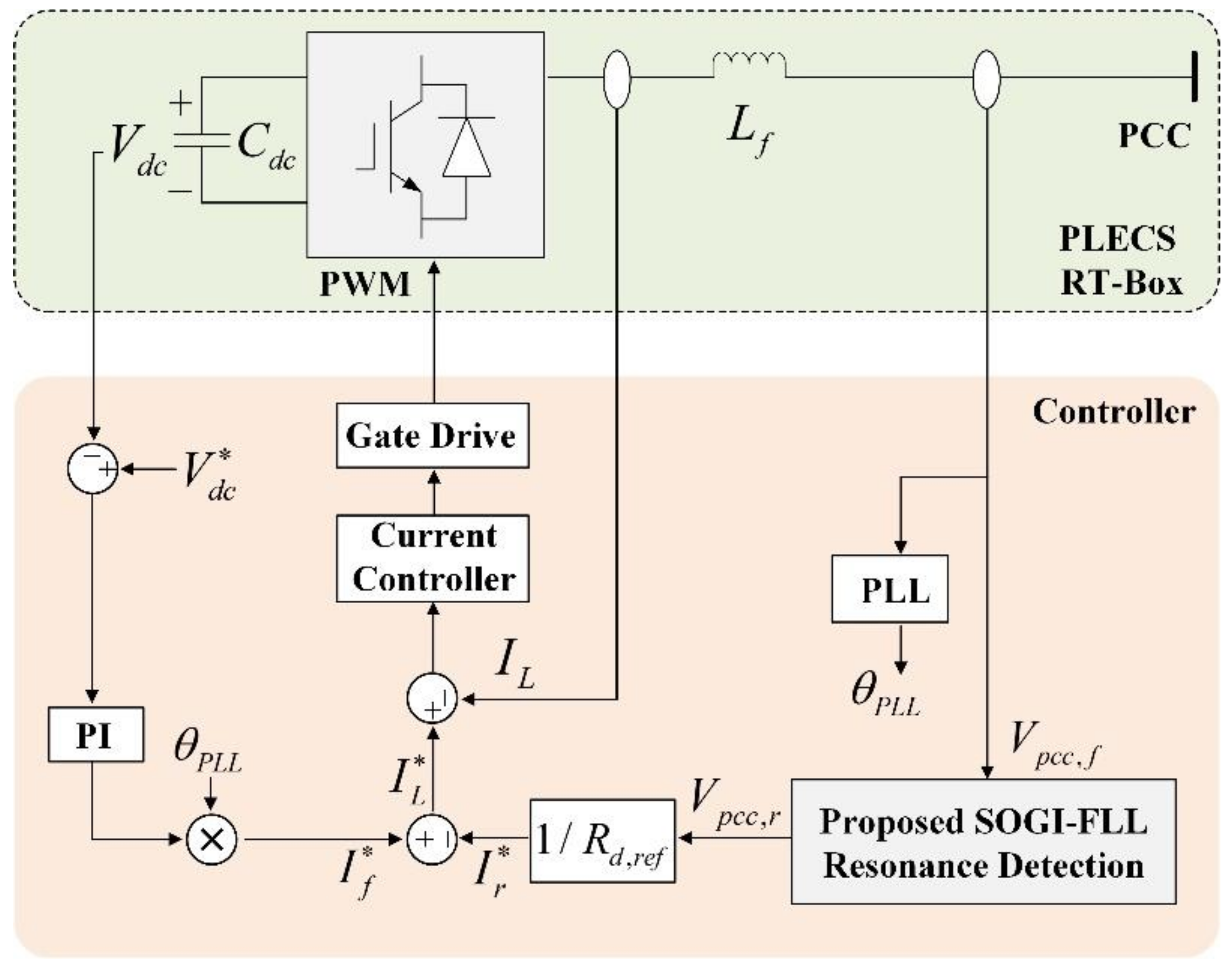
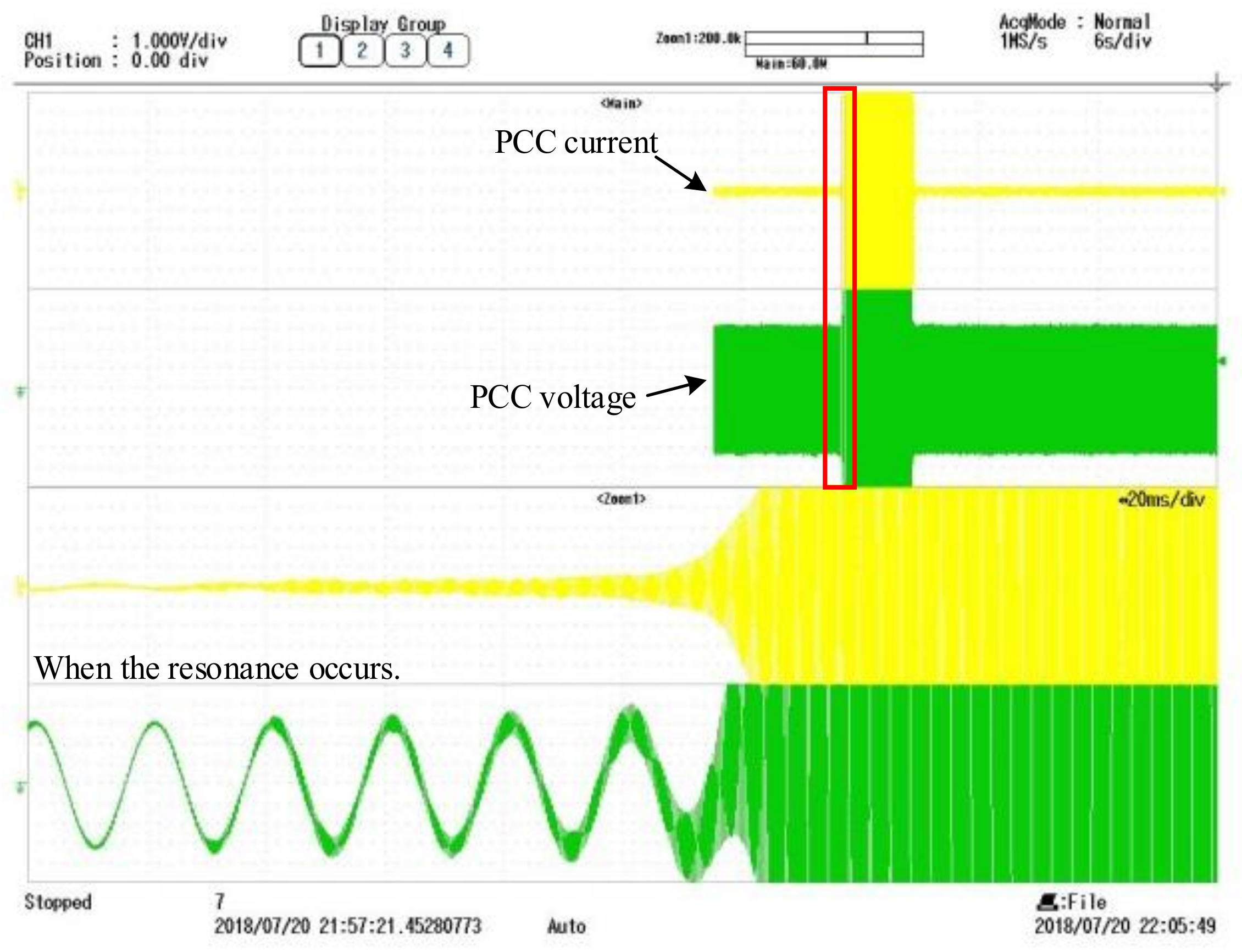
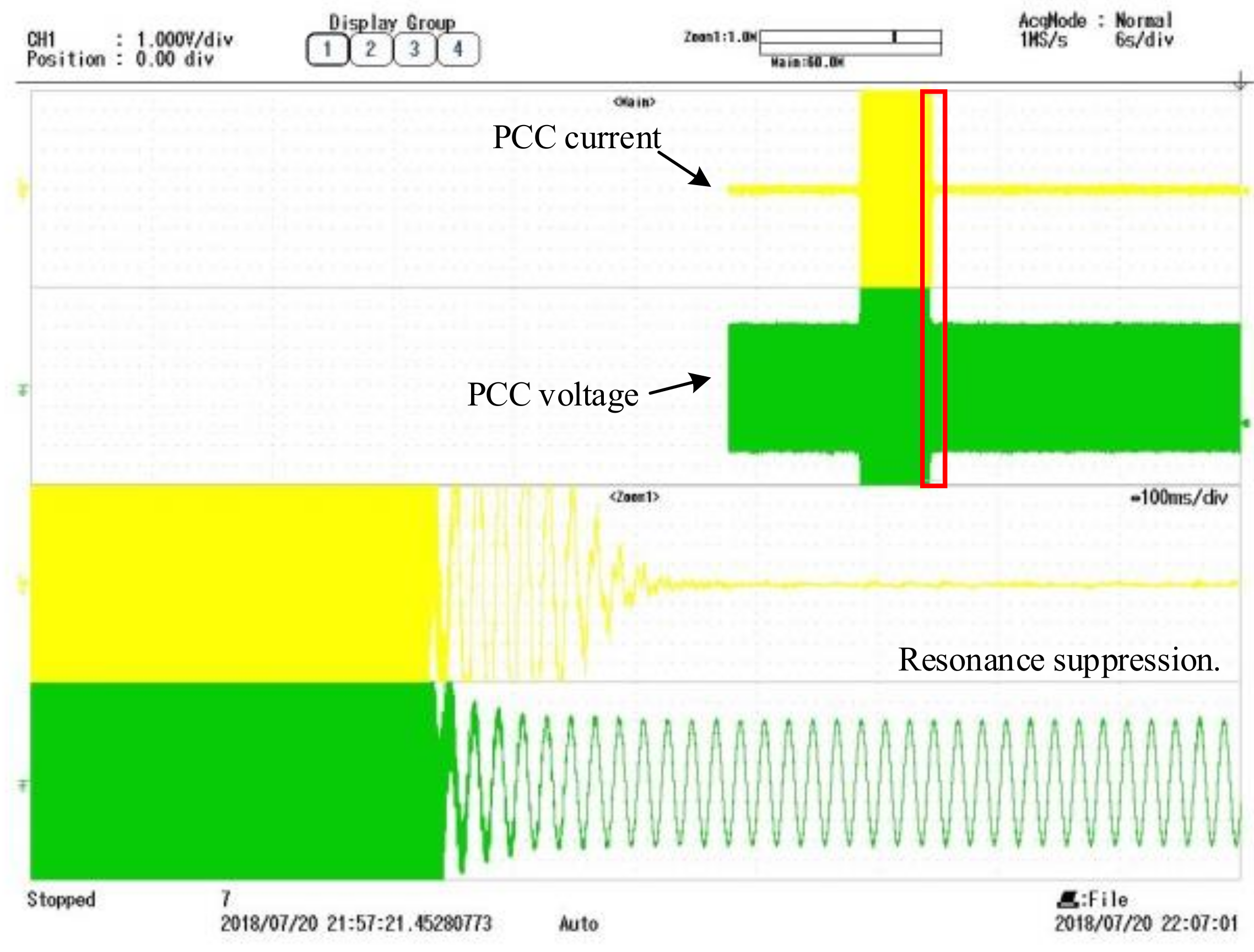
4.2. Hardware-in-the-Loop (HIL)-Based Emulation Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Yang, D.; Ruan, X.; Wu, H. Impedance Shaping of the Grid-Connected Inverter with LCL Filter to Improve Its Adaptability to the Weak Grid Condition. IEEE Trans. Power Electron. 2014, 29, 5795–5805. [Google Scholar] [CrossRef]
- Blaabjerg, F.; Teodorescu, R.; Liserre, M.; Timbus, A.V. Overview of Control and Grid Synchronization for Distributed Power Generation Systems. IEEE Trans. Ind. Electron. 2006, 53, 1398–1409. [Google Scholar] [CrossRef]
- Cao, W.; Fan, D.; Liu, K.; Zhao, J.; Ruan, L.; Wu, X. Resonance Detection Strategy for Multiple Grid-Connected Inverters-based System Using Cascaded Second-Order Generalized Integrator. In Proceedings of the International Power Electronics Conference (IPEC-Niigata 2018—ECCE Asia), Niigata, Japan, 20–24 May 2018. [Google Scholar]
- Wang, X.; Blaabjerg, F.; Liserre, M.; Chen, Z.; He, J.; Li, Y. An active damper for stabilizing power-electronics-based AC systems. IEEE Trans. Power Electron. 2014, 29, 3318–3329. [Google Scholar] [CrossRef]
- Wang, F.; Feng, X.; Zhang, L.; Du, Y.; Su, J. Impedance-based analysis of grid harmonic interactions between aggregated flyback micro-inverters and the grid. IET Power Electron. 2018, 11, 453–459. [Google Scholar] [CrossRef]
- Ebrahimzadeh, E.; Blaabjerg, F.; Wang, X.; Bak, C.L. Harmonic Stability and Resonance Analysis in Large PMSG-Based Wind Power Plants. IEEE Trans. Sustain. Energy 2018, 9, 12–23. [Google Scholar] [CrossRef]
- Harnefors, L.; Wang, X.; Yepes, A.G.; Blaabjerg, F. Passivity-Based Stability Assessment of Grid-Connected VSCs—An Overview. IEEE J. Emerg. Sel. Top. Power Electron. 2016, 4, 116–125. [Google Scholar] [CrossRef]
- Wang, X.; Blaabjerg, F.; Wu, W. Modeling and Analysis of Harmonic Stability in an AC Power-Electronics-Based Power System. IEEE Trans. Power Electron. 2014, 29, 6421–6432. [Google Scholar] [CrossRef]
- Wang, Y.; Yuan, Y. Inertia Provision and Small Signal Stability Analysis of a Wind-Power Generation System Using Phase-Locked Synchronized Equation. Sustainability 2019, 11, 1400. [Google Scholar] [CrossRef]
- He, J.; Li, Y.W.; Bosnjak, D.; Harris, B. Investigation and Active Damping of Multiple Resonances in a Parallel-Inverter-Based Microgrid. IEEE Trans. Power Electron. 2013, 28, 234–246. [Google Scholar] [CrossRef]
- Yu, J.; Deng, L.; Song, D.; Pei, M. Wide Bandwidth Control for Multi-Parallel Grid-Connected Inverters with Harmonic Compensation. Energies 2019, 12, 571. [Google Scholar] [CrossRef]
- Bai, H.; Wang, X.; Loh, P.C.; Blaabjerg, F. Passivity Enhancement of Grid-Tied Converters by Series LC-Filtered Active Damper. IEEE Trans. Ind. Electron. 2017, 64, 369–379. [Google Scholar] [CrossRef]
- Jia, L.; Ruan, X.; Zhao, W.; Lin, Z.; Wang, X. An Adaptive Active Damper for Improving the Stability of Grid-Connected Inverters under Weak Grid. IEEE Trans. Power Electron. 2018, 33, 9561–9574. [Google Scholar] [CrossRef]
- Golestan, S.; Guerrero, J.M.; Vasquez, J.C.; Abusorrah, A.M.; Al-Turki, Y. A Study on Three-Phase FLLs. IEEE Trans. Power Electron. 2019, 34, 213–224. [Google Scholar] [CrossRef]
- Dong, D.; Wen, B.; Mattavelli, P.; Boroyevich, D.; Xue, Y. Grid-synchronization modeling and its stability analysis for multi-paralleled three-phase inverter systems. In Proceedings of the IEEE Applied Power Electronics Conference and Exposition (APEC), Long Beach, CA, USA, 17–21 March 2013. [Google Scholar]
- Zeng, J.; Zhang, Z.; Qiao, W. An Interconnection and Damping Assignment Passivity-Based Controller for a DC–DC Boost Converter with a Constant Power Load. IEEE Trans. Ind. Appl. 2014, 50, 2314–2322. [Google Scholar] [CrossRef]
- Yan, Z.; He, H.; Li, J.; Su, M.; Zhang, C. Double fundamental frequency PLL with second order generalized integrator under unbalanced grid voltages. In Proceedings of the International Power Electronics and Application Conference and Exposition, Shanghai, China, 5–8 November 2014. [Google Scholar]
- Golestan, S.; Mousazadeh, S.Y.; Guerrero, J.M.; Vasquez, J.C. A Critical Examination of Frequency-Fixed Second-Order Generalized Integrator-Based Phase-Locked Loops. IEEE Trans. Power Electron. 2017, 32, 6666–6672. [Google Scholar] [CrossRef]
- Zhang, C.; Zhao, X.; Wang, X.; Chai, X.; Zhang, Z.; Guo, X. A Grid Synchronization PLL Method Based on Mixed Second- and Third-Order Generalized Integrator for DC Offset Elimination and Frequency Adaptability. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 6, 1517–1526. [Google Scholar] [CrossRef]
- Kherbachia, A.; Chouderb, A.; Bendiba, A.; Kara, K.; Barkat, S. Enhanced structure of second-order generalized integrator frequency-locked loop suitable for DC-offset rejection in single-phase systems. Electr. Power Syst. Res. 2019, 170, 348–357. [Google Scholar] [CrossRef]
- Golestan, S.; Guerrero, J.M.; Vasquez, J.C.; Abusorrah, A.M.; Al-Turki, Y. Modeling, Tuning, and Performance Comparison of Second-Order-Generalized-Integrator-Based FLLs. IEEE Trans. Power Electron. 2018, 33, 10229–10239. [Google Scholar] [CrossRef]
- Yan, Q.; Zhao, R.; Yuan, X.; Ma, W.; He, J. A DSOGI-FLL-Based Dead-Time Elimination PWM for Three-Phase Power Converters. IEEE Trans. Power Electron. 2019, 34, 2805–2818. [Google Scholar] [CrossRef]
- Yi, H.; Wang, X.; Blaabjerg, F.; Zhuo, F. Impedance Analysis of SOGI-FLL-Based Grid Synchronization. IEEE Trans. Power Electron. 2017, 32, 7409–7413. [Google Scholar] [CrossRef]
- Ren, X.; Lyu, Z.; Li, D.; Zhang, Z.; Zhang, S. Synchronization Signal Extraction Method based on Enhanced DSSOGI-FLL in Power Grid Distortion. Syst. Sci. Control Eng. 2018, 6, 305–313. [Google Scholar] [CrossRef]
- Rodriguez, P.; Luna, A.; Candela, I.; Mujal, R.; Teodorescu, R.; Blaabjerg, F. Multiresonant Frequency-Locked Loop for Grid Synchronization of Power Converters under Distorted Grid Conditions. IEEE Trans. Ind. Electron. 2011, 58, 127–138. [Google Scholar] [CrossRef]
- Rodriguez, P.; Luna, A.; Candela, I.; Teodorescu, R.; Blaabjerg, F. Grid synchronization of power converters using multiple second order generalized integrators. In Proceedings of the 34th Annual Conference of IEEE Industrial Electronics, Orlando, FL, USA, 10–13 November 2008. [Google Scholar]
- Matas, J.; Castilla, M.; Miret, J.; de Vicuña, L.G.; Guzman, R. An Adaptive Prefiltering Method to Improve the Speed/Accuracy Tradeoff of Voltage Sequence Detection Methods under Adverse Grid Conditions. IEEE Trans. Ind. Electron. 2014, 61, 2139–2151. [Google Scholar] [CrossRef]
- Wang, X.; Blaabjerg, F.; Liserre, M. An active damper to suppress multiple resonances with unknown frequencies. In Proceedings of the IEEE Applied Power Electronics Conference and Exposition (APEC-2014), Fort Worth, TX, USA, 16–20 March 2014. [Google Scholar]
- Yu, C.; Xu, H.; Liu, C.; Wang, Q.; Zhang, X. Modeling and Analysis of Common-Mode Resonance in Multi-Parallel PV String Inverters. IEEE Trans. Energy Convers. 2019, 34, 446–454. [Google Scholar] [CrossRef]
- Li, Z.; Xia, K.; Jiang, Q.; Wang, Y.; Xu, P. Analysis and simulation on active damping control of resonance in multi-parallel grid-connected inverters system. In Proceedings of the 2017 20th International Conference on Electrical Machines and Systems (ICEMS), Sydney, Australia, 11–14 August 2017; pp. 1–5. [Google Scholar]
- Cao, W.; Liu, K.; Wang, S.; Kang, H.; Fan, D.; Zhao, J. Harmonic Stability Analysis for Multi-Parallel Inverter-Based Grid-Connected Renewable Power System Using Global Admittance. Energies 2019, 12, 2687. [Google Scholar] [CrossRef]
- Liu, F.; Liu, J.; Zhang, H.; Xue, D. Stability Issues of Z + Z Type Cascade System in Hybrid Energy Storage System (HESS). IEEE Trans. Power Electron. 2014, 29, 5846–5859. [Google Scholar] [CrossRef]
- Bendib, A.; Chouder, A.; Kara, K.; Kherbachi, A.; Barkat, S. SOGI-FLL Based Optimal Current Control Scheme for Single-Phase Grid-Connected Photovoltaic VSIs with LCL Filter. In Proceedings of the 2018 International Conference on Electrical Sciences and Technologies in Maghreb (CISTEM), Algiers, Algeria, 28–31 October 2018; pp. 1–6. [Google Scholar]
- Freijedo, F.D.; Rodriguez-Diaz, E.; Dujic, D. Stable and Passive High-Power Dual Active Bridge Converters Interfacing MVDC Grids. IEEE Trans. Ind. Electron. 2018, 65, 9561–9570. [Google Scholar]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values | |
|---|---|---|
| Fundamental current signal i0 | Amplitude | 100 A |
| Frequency | 50 Hz | |
| Resonant current signal i1 | Amplitude | 20 A |
| Frequency | 320 Hz | |
| Resonant current signal i2 | Amplitude | 20 A |
| Frequency | 800 Hz | |
| The gain of SOGI-FLL k | 1.414 | |
| The negative gain of FLL γ | −100 | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cao, W.; Liu, K.; Kang, H.; Wang, S.; Fan, D.; Zhao, J. Resonance Detection Strategy for Multi-Parallel Inverter-Based Grid-Connected Renewable Power System Using Cascaded SOGI-FLL. Sustainability 2019, 11, 4839. https://doi.org/10.3390/su11184839
Cao W, Liu K, Kang H, Wang S, Fan D, Zhao J. Resonance Detection Strategy for Multi-Parallel Inverter-Based Grid-Connected Renewable Power System Using Cascaded SOGI-FLL. Sustainability. 2019; 11(18):4839. https://doi.org/10.3390/su11184839
Chicago/Turabian StyleCao, Wu, Kangli Liu, Haotian Kang, Shunyu Wang, Dongchen Fan, and Jianfeng Zhao. 2019. "Resonance Detection Strategy for Multi-Parallel Inverter-Based Grid-Connected Renewable Power System Using Cascaded SOGI-FLL" Sustainability 11, no. 18: 4839. https://doi.org/10.3390/su11184839
APA StyleCao, W., Liu, K., Kang, H., Wang, S., Fan, D., & Zhao, J. (2019). Resonance Detection Strategy for Multi-Parallel Inverter-Based Grid-Connected Renewable Power System Using Cascaded SOGI-FLL. Sustainability, 11(18), 4839. https://doi.org/10.3390/su11184839