Stochastic Electric Vehicle Network Considering Environmental Costs



Abstract
1. Introduction
1.1. Related Studies
1.2. Objectives and Contributions
2. Methodology
2.1. Modeling
2.1.1. Environmental Costs
2.1.2. Logit-Based Stochastic User Equilibrium
2.1.3. Stochastic User Equilibrium for EVs with Environmental Costs
2.2. Algorithm
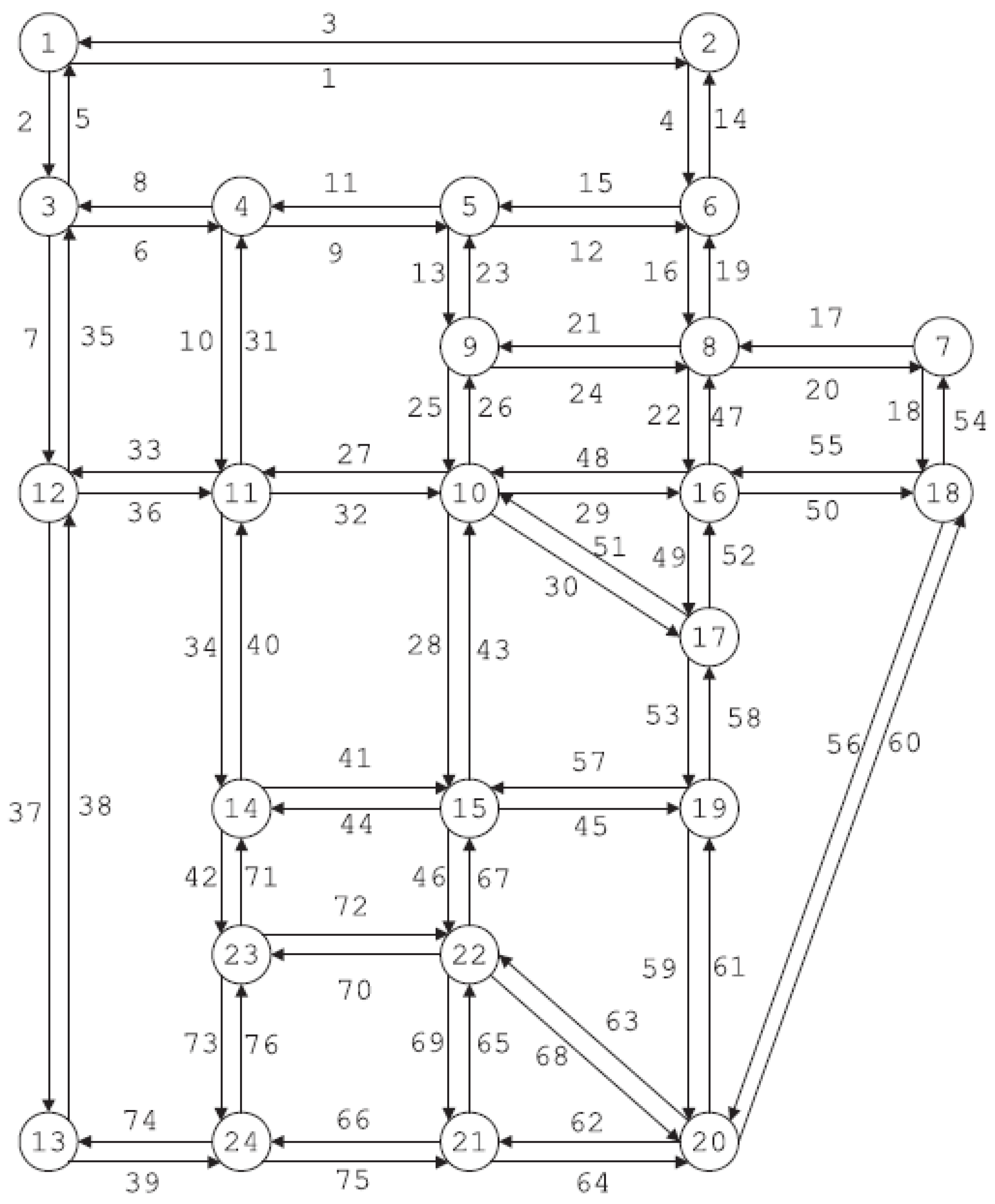
3. Numerical Example
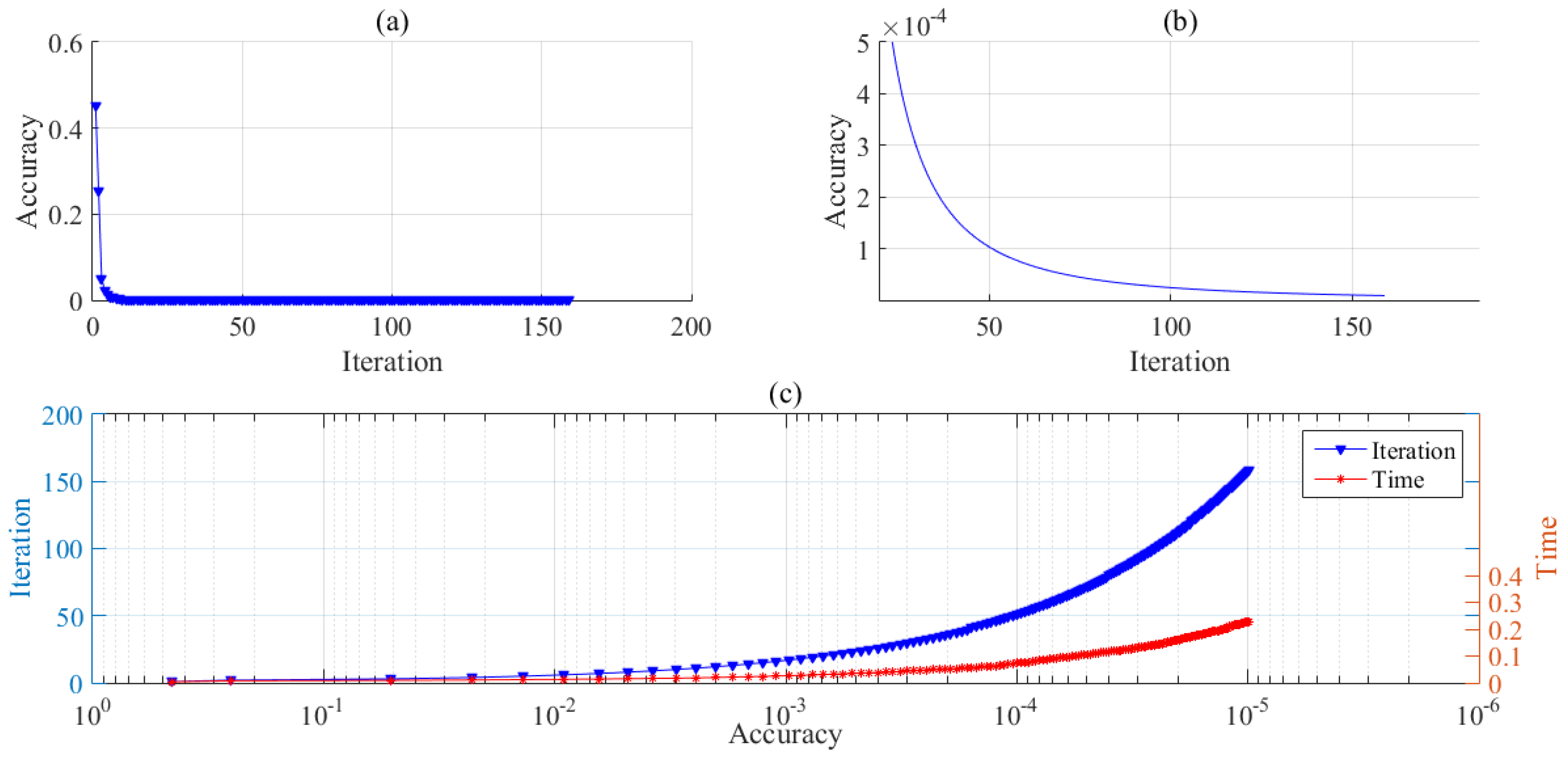
3.1. Calculation Feasibility
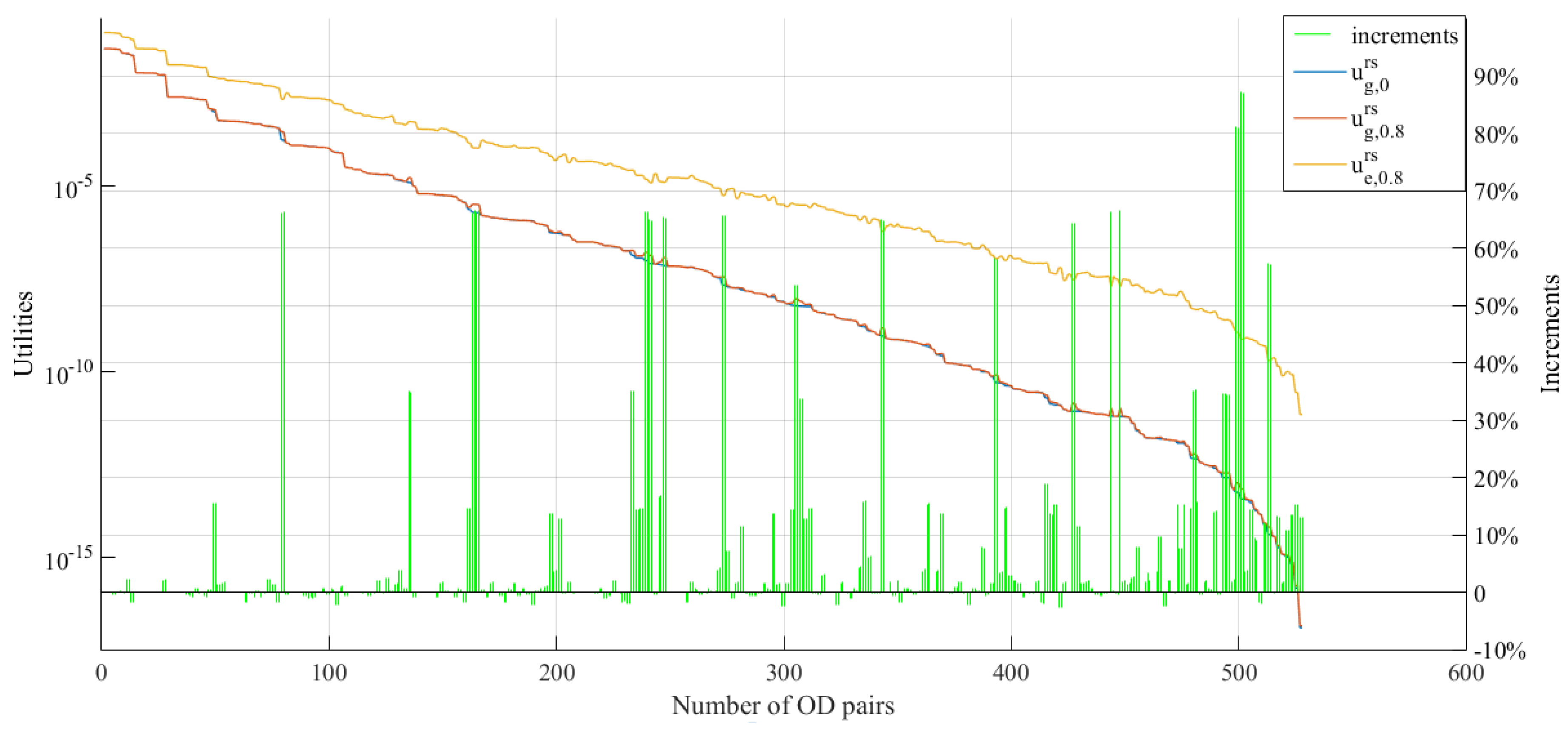
3.2. Comparative Analysis
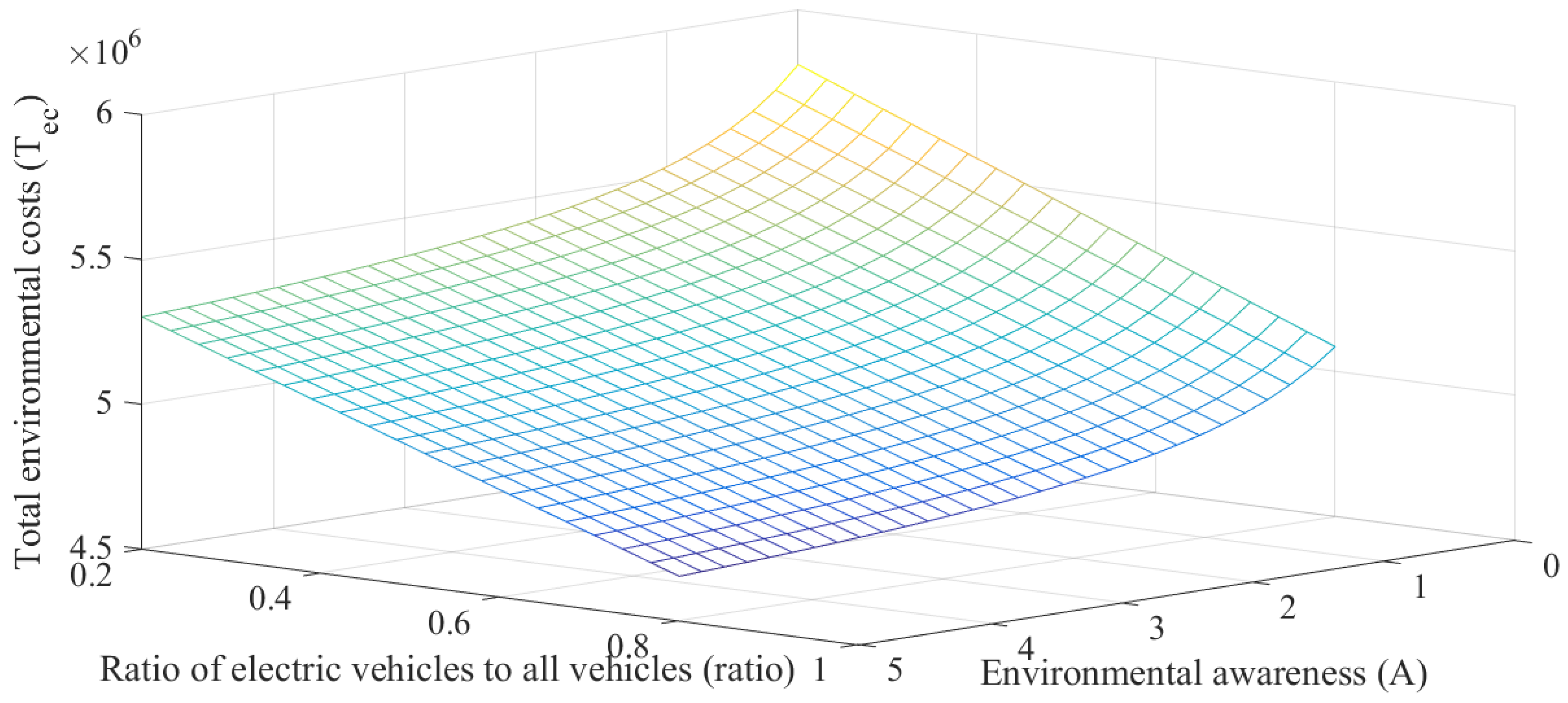
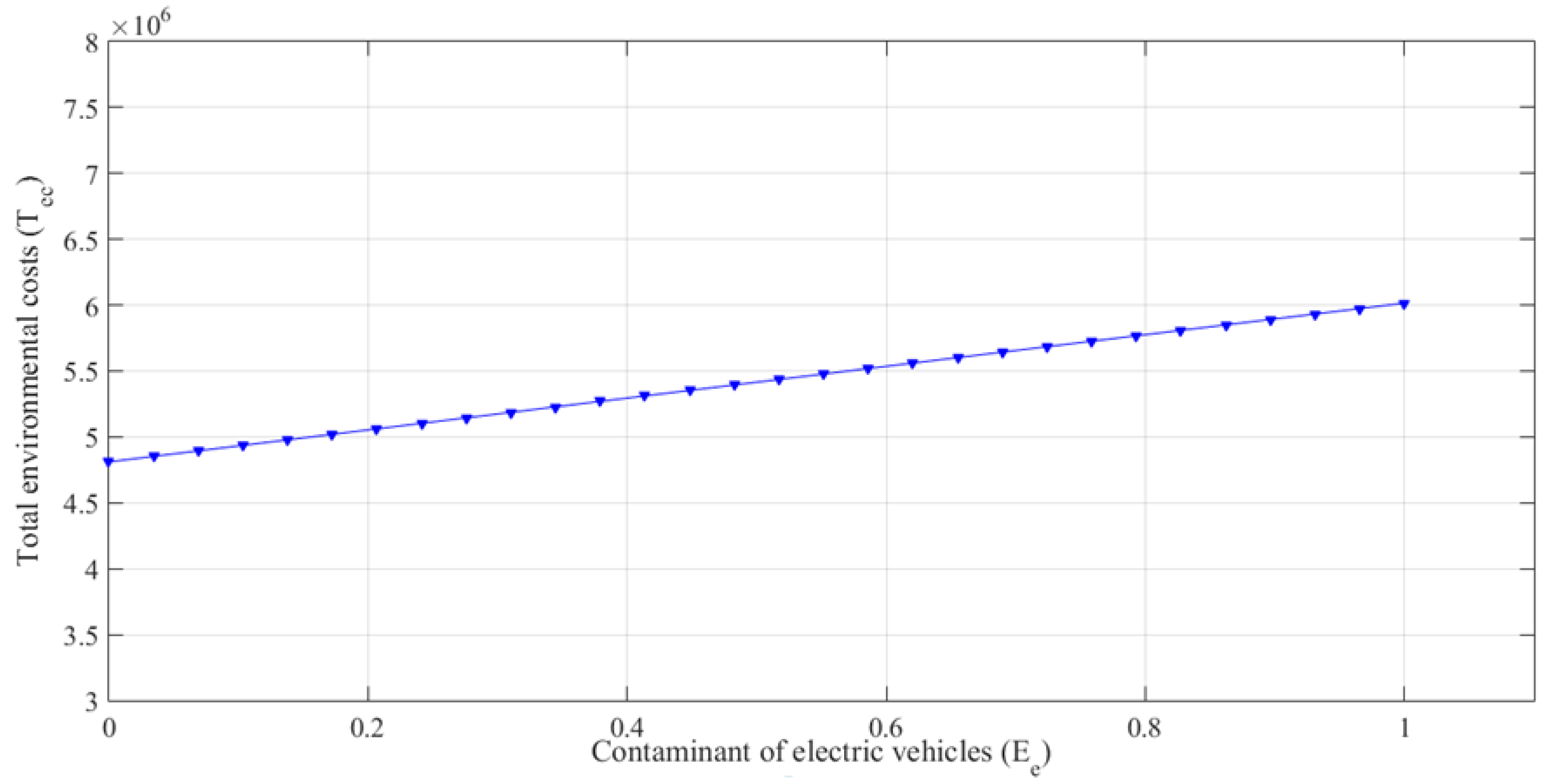
3.3. Sensitivity Analysis
4. Discussions and Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Notations
| Sets | |
| set of links, where | |
| set of vehicles, , denotes electric vehicles, denotes gas vehicles | |
| set of route between origin-destination (OD) pairs , | |
| set of nodes, where | |
| set of OD pairs, | |
| Parameters | |
| environmental awareness | |
| travel cost of vehicle on path between OD pairs | |
| capacity of link | |
| physical length of link | |
| contaminant of EVs | |
| probability for vehicle to choose route between OD pairs | |
| traffic demand of vehicle between OD pairs | |
| ratio of the number of EVs to that of all vehicles in the network | |
| generalized costs of vehicle on link | |
| utility of OD pair for the vehicle | |
| travel cost perception of vehicle | |
| link-path incidence parameter, where if link is contained by path between OD pairs , and , otherwise | |
| Variables | |
| path flow of vehicle on path between OD pairs ; | |
| link flow of vehicle on link ; , | |
References
- Addison, J. National Academies Predicts 13 to 40 Million Plug-ins by 2030. Available online: http://www.cleanfleetreport.com/plug-in-hybrids/national-academies-40-million-plug-ins (accessed on 19 May 2018).
- Lin, Z.; Greene, D.L. Promoting the market for plug-in hybrid and battery electric vehicles: Role of recharge availability. Transp. Res. Rec. J. Transp. Res. Board 2011, 2252, 49–56. [Google Scholar] [CrossRef]
- Jafari, E.; Boyles, S.D. Multicriteria stochastic shortest path problem for electric vehicles. Netw. Spat. Econ. 2017, 17, 1043–1070. [Google Scholar] [CrossRef]
- Yi, Z.; Smart, J.; Shirk, M. Energy impact evaluation for eco-routing and charging of autonomous electric vehicle fleet: Ambient temperature consideration. Transp. Res. Part C Emerg. Technol. 2018, 89, 344–363. [Google Scholar] [CrossRef]
- Sun, X.; Lu, H.; Chu, W. A low-carbon-based bilevel optimization model for public transit network. Math. Probl. Eng. 2013, 2013. [Google Scholar] [CrossRef]
- Jiang, N.; Xie, C. Computing and analyzing mixed equilibrium network flows with gasoline and electric vehicles. Comput. Aided Civ. Infrastruct. Eng. 2014, 29, 626–641. [Google Scholar] [CrossRef]
- Blackman, A.; Alpízar, F.; Carlsson, F.; Rivera, M. A contingent valuation approach to estimating regulatory costs: Mexico’s day without driving program. J. Assoc. Environ. Resour. Econ. 2018, 5, 15–21. [Google Scholar] [CrossRef]
- Zhu, W.; Yang, D.; Huang, J. A hybrid optimization strategy for the maintenance of the wheels of metro vehicles: Vehicle turning, wheel re-profiling, and multi-template use. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit. 2018, 232, 832–841. [Google Scholar] [CrossRef]
- Bauer, G.S.; Greenblatt, J.B.; Gerke, B.F. Cost, energy, and environmental impact of automated electric taxi fleets in Manhattan. Environ. Sci. Technol. 2018, 52, 4920–4928. [Google Scholar] [CrossRef] [PubMed]
- Ioakimidis, C.S.; Thomas, D.; Rycerski, P.; Genikomsakis, K.N. Peak shaving and valley filling of power consumption profile in non-residential buildings using an electric vehicle parking lot. Energy 2018, 148, 148–158. [Google Scholar] [CrossRef]
- Tang, Y.; Zhang, Q.; Li, Y.; Wang, G.; Li, Y. Recycling mechanisms and policy suggestions for spent electric vehicles’ power battery—A case of Beijing. J. Clean. Prod. 2018, 186, 388–406. [Google Scholar] [CrossRef]
- Mazur, C.; Offer, G.J.; Contestabile, M.; Brandon, N.B. Comparing the effects of vehicle automation, policy-making and changed user preferences on the uptake of electric cars and emissions from transport. Sustainability 2018, 10, 676. [Google Scholar] [CrossRef]
- Park, E.; Lim, J.; Cho, Y. Understanding the emergence and social acceptance of electric vehicles as next-generation models for the automobile industry. Sustainability 2018, 10, 662. [Google Scholar] [CrossRef]
- Ma, J.; Li, D.; Cheng, L.; Lou, X.; Sun, C.; Tang, W. Link restriction: Methods of testing and avoiding braess paradox in networks considering traffic demands. J. Transp. Eng. Part A Syst. 2018, 144. [Google Scholar] [CrossRef]
- Kitthamkesorn, S.; Chen, A.; Xu, X.; Ryu, S. Modeling mode and route similarities in network equilibrium problem with go-green modes. Netw. Spat. Econ. 2016, 16, 33–60. [Google Scholar] [CrossRef]
- Mahmassani, H.S.; Chang, G.-L. On boundedly rational user equilibrium in transportation systems. Transp. Sci. 1987, 21, 89–99. [Google Scholar] [CrossRef]
- Guo, X.; Yang, H.; Liu, T.L. Bounding the inefficiency of logit-based stochastic user equilibrium. Eur. J. Oper. Res. 2010, 201, 463–469. [Google Scholar] [CrossRef]
- Barros, C.P.; Managi, S. French nuclear electricity plants: Productivity and air pollution. Energy Sources Part B Econ. Plan. Policy 2016, 11, 718–724. [Google Scholar] [CrossRef]
- Kuang, A.W.; Huang, Z.X. Stochastic user equilibrium traffic assignment with multiple user classes and elastic demand. In Proceedings of the 2010 International Conference on Intelligent Computation Technology and Automation, Changsha, China, 11–12 May 2010; pp. 394–397. [Google Scholar] [CrossRef]
- Ma, J.; Cheng, L.; Li, D. Road maintenance optimization model based on dynamic programming in urban traffic network. J. Adv. Transp. 2018, 2018, 11. [Google Scholar] [CrossRef]
- Daganzo, C.; Sheffi, Y. On stochastic models of traffic assignment. Transp. Sci. 1977, 11, 253–274. [Google Scholar] [CrossRef]
- Li, D.; Miwa, T.; Morikawa, T.; Liu, P. Incorporating observed and unobserved heterogeneity in route choice analysis with sampled choice sets. Transp. Res. Part C Emerg. Technol. 2016, 67, 31–46. [Google Scholar] [CrossRef]
- Li, D.; Miwa, T.; Morikawa, T. Modeling time-of-day car use behavior: A bayesian network approach. Transp. Res. Part D Transp. Environ. 2016, 47, 54–66. [Google Scholar] [CrossRef]
- McFadden, D. Conditional logit analysis of qualitative choice behavior. In Frontiers in Econometrics; Acedemic Press: New York, NY, USA, 1973; pp. 105–142. [Google Scholar]
- Luce, R.D. Individual Choice Behavior: A Theoretical Analysis; John Wiley & Sons: New York, NY, USA, 1959. [Google Scholar]
- Almond, J. Traffic assignment with flow-dependent journey times. In Vehicular Traffic Science; Elsevier: New York, NY, USA, 1967; pp. 222–234. [Google Scholar]
- Robinson, S. Springer Series in Operations Research; Springer: New York, NY, USA, 1997; ISBN 9781461271291. [Google Scholar]
- Leblanc, L.J. An algorithm for the discrete network design problem. Transp. Sci. 1975, 9, 183–199. [Google Scholar] [CrossRef]
- Wang, D.Z.W.; Lo, H.K. Global optimum of the linearized network design problem with equilibrium flows. Transp. Res. Part B 2010, 44, 482–492. [Google Scholar] [CrossRef]
- Wang, S.; Gardner, L.; Waller, S.T. Global optimization method for robust pricing of transportation networks under uncertain demand. In Proceedings of the 92nd Annual Meeting of Transportation Research Board to be Considered for Presentation and Publication in Transportation Research Record, Washington, DC, USA, 13–17 January 2013; pp. 33–48. [Google Scholar]
- Di, Z.; Yang, L.; Qi, J.; Gao, Z. Transportation network design for maximizing flow-based accessibility. Transp. Res. Part B Methodol. 2018, 110, 209–238. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Iteration | Accuracy | Iteration | Accuracy | Iteration | Accuracy | Iteration | Accuracy |
|---|---|---|---|---|---|---|---|
| 1 | 4.5 × 10−1 | 10 | 3.0 × 10−3 | 60 | 7.2 × 10−5 | 120 | 1.8 × 10−5 |
| 3 | 5.1 × 10−2 | 20 | 6.9 × 10−4 | 80 | 4.0 × 10−5 | 140 | 1.3 × 10−5 |
| 6 | 9.1 × 10−3 | 30 | 3.0 × 10−4 | 100 | 2.5 × 10−5 | 159 | 9.9 × 10−6 |
| # of Link | F0.8 | F0 | # of Link | F0.8 | F0 | # of Link | F0.8 | F0 |
|---|---|---|---|---|---|---|---|---|
| 1 | 1790 | 1774 | 27 | 8339 | 8237 | 53 | 6257 | 6185 |
| 2 | 2729 | 2701 | 28 | 7290 | 6960 | 54 | 4919 | 5058 |
| 3 | 1792 | 1775 | 29 | 7949 | 8381 | 55 | 5650 | 5911 |
| 4 | 2810 | 2809 | 30 | 2130 | 1796 | 56 | 5467 | 5566 |
| 5 | 2728 | 2700 | 31 | 3207 | 3110 | 57 | 5926 | 6157 |
| 6 | 3461 | 3461 | 32 | 8277 | 8175 | 58 | 6256 | 6185 |
| 7 | 2921 | 2840 | 33 | 4963 | 4991 | 59 | 3092 | 3011 |
| 8 | 3468 | 3468 | 34 | 6193 | 6462 | 60 | 5456 | 5557 |
| 9 | 5178 | 5173 | 35 | 2913 | 2832 | 61 | 3092 | 3011 |
| 10 | 3168 | 3074 | 36 | 4945 | 4969 | 62 | 2649 | 2611 |
| 11 | 5156 | 5148 | 37 | 4619 | 4628 | 63 | 3581 | 3397 |
| 12 | 3912 | 3972 | 38 | 4591 | 4598 | 64 | 2639 | 2602 |
| 13 | 3759 | 3750 | 39 | 4344 | 4338 | 65 | 3905 | 3932 |
| 14 | 2811 | 2809 | 40 | 6188 | 6459 | 66 | 4174 | 4347 |
| 15 | 3931 | 3977 | 41 | 3894 | 3881 | 67 | 8269 | 8277 |
| 16 | 5703 | 5706 | 42 | 3317 | 3207 | 68 | 3582 | 3397 |
| 17 | 3214 | 3116 | 43 | 7333 | 7003 | 69 | 3878 | 3902 |
| 18 | 4929 | 5065 | 44 | 3885 | 3874 | 70 | 4350 | 4301 |
| 19 | 5722 | 5712 | 45 | 5925 | 6156 | 71 | 3321 | 3210 |
| 20 | 3224 | 3123 | 46 | 8236 | 8242 | 72 | 4357 | 4307 |
| 21 | 782 | 633 | 47 | 4915 | 4967 | 73 | 2995 | 2848 |
| 22 | 4929 | 4980 | 48 | 7948 | 8380 | 74 | 4317 | 4308 |
| 23 | 3719 | 3718 | 49 | 6228 | 6344 | 75 | 4190 | 4368 |
| 24 | 781 | 632 | 50 | 5651 | 5912 | 76 | 3006 | 2857 |
| 25 | 7329 | 7302 | 51 | 2129 | 1795 | |||
| 26 | 7289 | 7270 | 52 | 6229 | 6345 |
| # of OD Pair | (r–s) | |||
|---|---|---|---|---|
| 25 | (1–14) | 1.338 × 10−12 | 1.084 × 10−8 | 1.159 × 10−12 |
| 50 | (4–2) | 5.909 × 10−8 | 1.511 × 10−5 | 5.868 × 10−8 |
| 75 | (2–17) | 2.910 × 10−10 | 3.192 × 10−7 | 2.803 × 10−10 |
| 100 | (12–3) | 2.479 × 10−3 | 1.831 × 10−2 | 2.479 × 10−3 |
| 125 | (4–10) | 3.510 × 10−7 | 5.719 × 10−5 | 3.521 × 10−7 |
| 150 | (22–4) | 1.659 × 10−12 | 1.612 × 10−8 | 1.513 × 10−12 |
| 175 | (5–16) | 3.447 × 10−8 | 8.709 × 10−6 | 3.307 × 10−8 |
| 200 | (12–6) | 6.746 × 10−10 | 7.515 × 10−7 | 6.697 × 10−10 |
| 225 | (7–8) | 1.104 × 10−2 | 4.947 × 10−2 | 1.105 × 10−2 |
| 250 | (20–7) | 1.233 × 10−4 | 2.476 × 10−3 | 1.233 × 10−4 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, J.; Cheng, L.; Li, D.; Tu, Q. Stochastic Electric Vehicle Network Considering Environmental Costs. Sustainability 2018, 10, 2888. https://doi.org/10.3390/su10082888
Ma J, Cheng L, Li D, Tu Q. Stochastic Electric Vehicle Network Considering Environmental Costs. Sustainability. 2018; 10(8):2888. https://doi.org/10.3390/su10082888
Chicago/Turabian StyleMa, Jie, Lin Cheng, Dawei Li, and Qiang Tu. 2018. "Stochastic Electric Vehicle Network Considering Environmental Costs" Sustainability 10, no. 8: 2888. https://doi.org/10.3390/su10082888
APA StyleMa, J., Cheng, L., Li, D., & Tu, Q. (2018). Stochastic Electric Vehicle Network Considering Environmental Costs. Sustainability, 10(8), 2888. https://doi.org/10.3390/su10082888