Unintended Effects of Autonomous Driving: A Study on Mobility Preferences in the Future

Abstract
1. Introduction
2. Environmental Impacts of Autonomous Driving
2.1. Positive Environmental Effects
2.1.1. Positive Impacts on Traffic System Performance
2.1.2. Positive Impacts on Travel Mode Choice
2.2. Rebound Effects as Negative Environmental Effects
2.2.1. Negative Impacts of Increased Travel Demand
2.2.2. Negative Impacts of Empty Runs
2.2.3. Negative Impacts of Unintended Shifts in Mode Choice
3. Theory and Research in Travel Mode Choice
3.1. Theory of Travel Mode Choice and Random Utility
- Travel time is the total time required to cover a distance from A to B. Depending on the travel mode, travel time includes not only the actual time spent travelling but also various activities such as finding a parking space, walking times from an origin to the access point, transfer times, or waiting times at stops.
- Travel costs include all costs for the use of a travel mode. For users, it is often only variable costs or perceived costs that are relevant [57].
- Comfort includes all the features that make a ride pleasant for the user. Thus, comfort consists of several sub-attributes such as the quality of seats, probability of sitting, possibility to transport goods, the passenger’s privacy, level of crowdedness, and quality of time due to efficient time utilization.
- Flexibility refers to the possibility to use the travel mode at your own discretion and adapt it to your own needs.
- Availability of the travel modes is given if it is accessible to a user and ready for operation when the user wants or needs it.
- Reliability refers to the extent to which a travel mode carries out a trip as intended or scheduled.
- Safety describes the condition that gives the passenger the feeling of confidence that a travel mode will take him or her safely to a destination.
3.2. Changes in Private Car Characteristics
3.3. Changes in Carsharing Characteristics
4. Methodology
5. Results
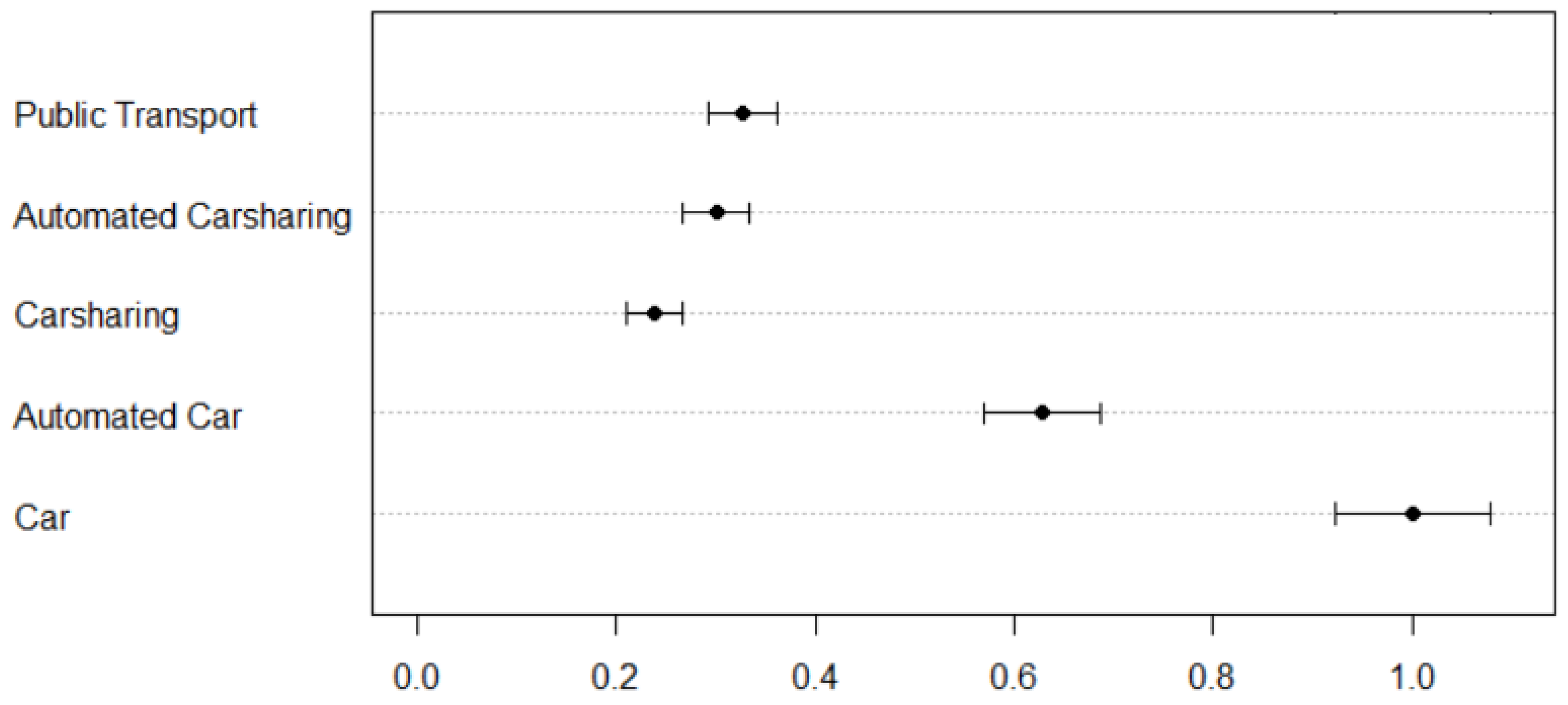
5.1. Preferences of the Various Travel Modes
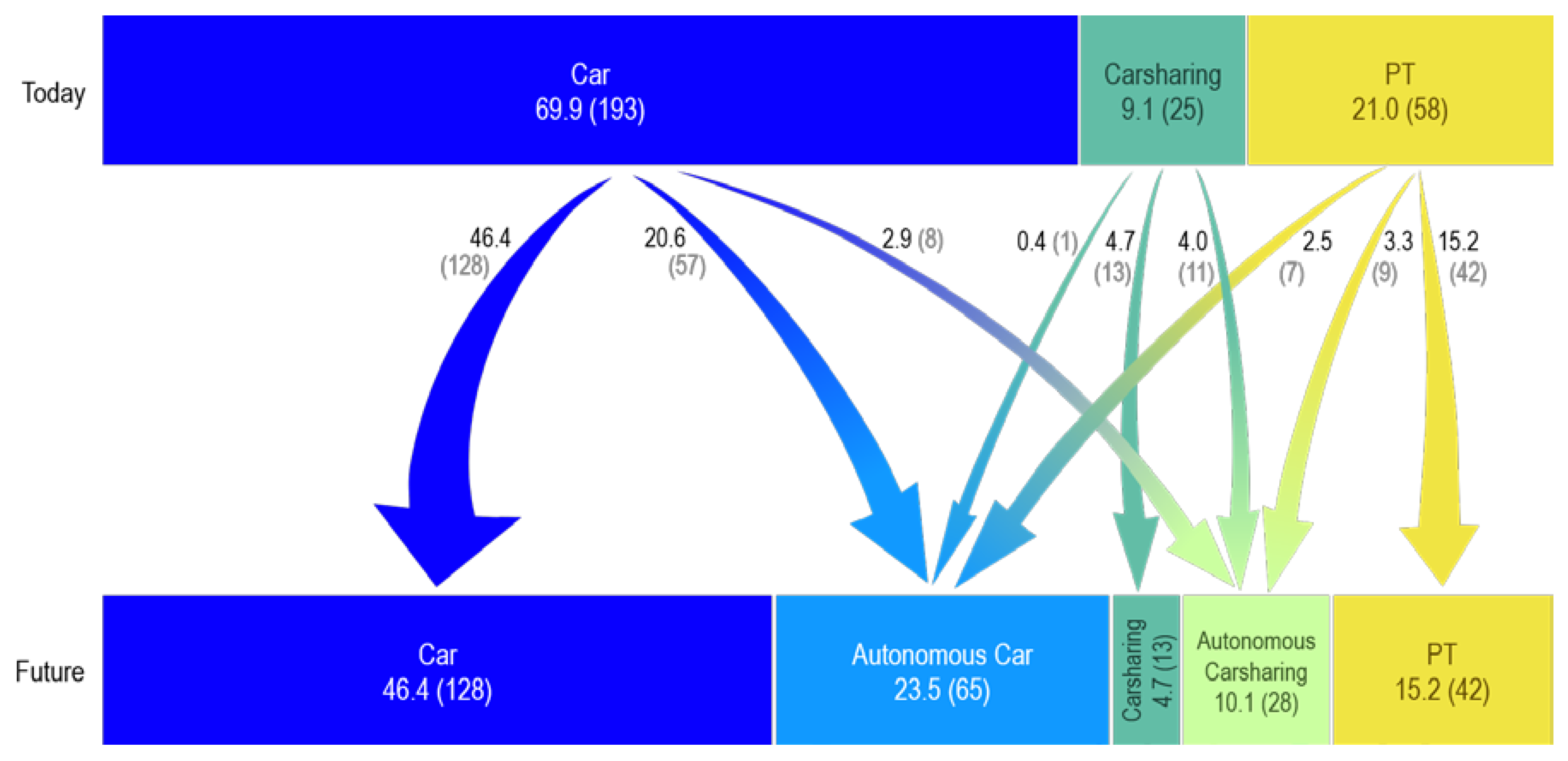
5.2. Changes in the First-Choice Preference
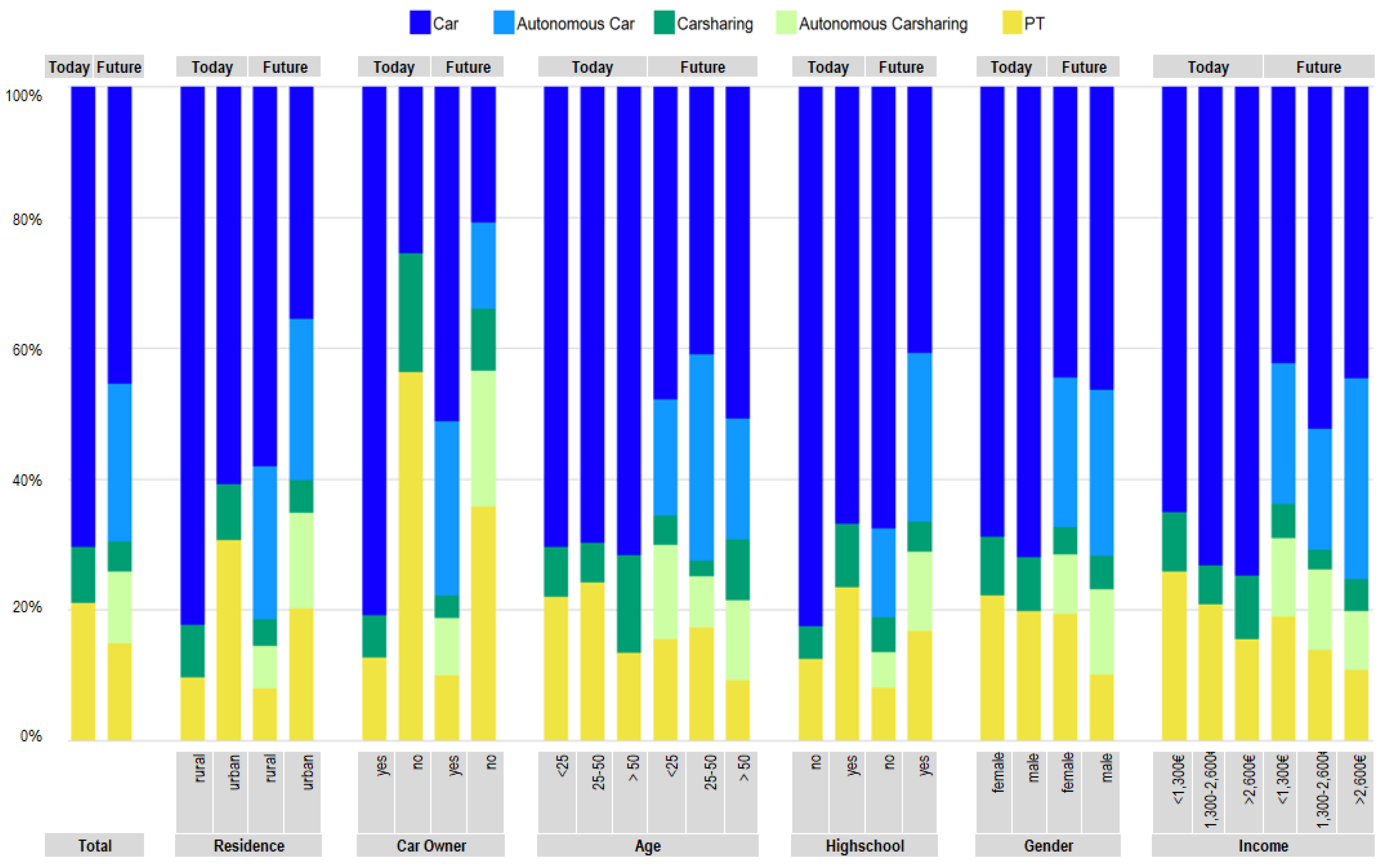
5.3. Group-Dependent Results
5.2.1. Place of Residence
5.2.2. Car Ownership
5.2.3. Age
5.2.4. Education
5.2.5. Gender
5.2.6. Income
6. Discussion
6.1. The Private Car is Still Preferred over Automated Alternative Modes
6.2. Carsharing Strongly Benefits from Automation
6.3. Public Transport as Loser of Vehicle Automation
6.4. The Impact of Individual Characteristics on Travel Mode Choice
7. Imitations and Implications for Future Research
8. Conclusions
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- Gao, P.; Kaas, H.-W.; Mohr, D.; Wee, D. Automotive Revolution: Perspective towards 2030: How the Convergence of Disruptive Technology-Driven Trends Could Transform the Auto Industry; Advanced Industries; McKinsey & Company: New York, NY, USA, 2016. [Google Scholar]
- International Energy Agency. Transport Energy and CO2: Moving towards Sustainability; OECD Publishing: Paris, France, 2009. [Google Scholar]
- Kramers, A.; Höjer, M.; Lövehagen, N.; Wangel, J. ICT for Sustainable Cities: How ICT can support an environmentally sustainable development in cities. In Proceedings of the First International Conference on Information and Communication Technologies for Sustainability ETH, Zürich, Switzerland, 14–16 February 2013; pp. 183–188. [Google Scholar]
- Gössling, S.; Schröder, M.; Späth, P.; Freytag, T. Urban Space Distribution and Sustainable Transport. Transp. Rev. 2016, 36, 659–679. [Google Scholar] [CrossRef]
- Höjer, M.; Wangel, J. Smart sustainable cities: Definition and challenges. In ICT Innovations for Sustainability; Springer: New York, NY, USA, 2015; pp. 333–349. [Google Scholar]
- Owczarzak, L.; Żak, J. Design of passenger public transportation solutions based on autonomous vehicles and their multiple criteria comparison with traditional forms of passenger transportation. Transp. Res. Procedia 2015, 10, 472–482. [Google Scholar] [CrossRef]
- Spieser, K.; Treleaven, K.; Zhang, R.; Frazzoli, E.; Morton, D.; Pavone, M. Toward a systematic approach to the design and evaluation of automated mobility-on-demand systems: A case study in Singapore. In Road Vehicle Automation; Springer: New York, NY, USA, 2014; pp. 229–245. [Google Scholar]
- Bischoff, J.; Maciejewski, M. Simulation of city-wide replacement of private cars with autonomous taxis in Berlin. Procedia Comput. Sci. 2016, 83, 237–244. [Google Scholar] [CrossRef]
- Krueger, R.; Rashidi, T.H.; Rose, J.M. Preferences for shared autonomous vehicles. Transp. Res. Part C Emerg. Technol. 2016, 69, 343–355. [Google Scholar] [CrossRef]
- Binswanger, M. Technological progress and sustainable development: What about the rebound effect? Ecolog. Econ. 2001, 36, 119–132. [Google Scholar] [CrossRef]
- Walnum, H.J.; Aall, C.; Løkke, S. Can Rebound Effects Explain Why Sustainable Mobility Has Not Been Achieved? Sustainability 2014, 6, 9510–9537. [Google Scholar] [CrossRef]
- Pargman, D.; Eriksson, E.; Friday, A. Limits to the Sharing Economy. In Proceedings of the Second Workshop on Computing Within Limits, Irvine, CA, USA, 8–10 June 2016; ACM: New York, NY, USA, 2016. [Google Scholar]
- Milakis, D.; Van Arem, B.; Van Wee, B. Policy and society related implications of automated driving: A review of literature and directions for future research. J. Intell. Transp. Syst. 2017, 21, 324–348. [Google Scholar] [CrossRef]
- Payre, W.; Cestac, J.; Delhomme, P. Intention to use a fully automated car: Attitudes and a priori acceptability. Transp. Res. Part F Traffic Psychol. Behav. 2014, 27, 252–263. [Google Scholar] [CrossRef]
- SAE International. Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles 6; SAE International: Warrendale, PA, USA, 2016. [Google Scholar]
- Trommer, S.; Kolarova, V.; Fraedrich, E.; Kröger, L.; Kickhöfer, B.; Kuhnimhof, T.; Lenz, B.; Phleps, P. Autonomous Driving—The Impact of Vehicle Automation on Mobility Behaviour; ifmo: Munich, Germany, 2016. [Google Scholar]
- Fagnant, D.J.; Kockelman, K. Preparing a nation for autonomous vehicles: Opportunities, barriers and policy recommendations. Transp. Res. Part A Policy Pract. 2015, 77, 167–181. [Google Scholar] [CrossRef]
- Brown, A.; Gonder, J.; Repac, B. An analysis of possible energy impacts of automated vehicle. In Road Vehicle Automation; Springer: New York, NY, USA, 2014; pp. 137–153. [Google Scholar]
- Ringenson, T.; Höjer, M.; Kramers, A.; Viggedal, A. Digitalization and Environmental Aims in Municipalities. Sustainability 2018, 10, 1278. [Google Scholar] [CrossRef]
- Greenblatt, J.B.; Saxena, S. Autonomous taxis could greatly reduce greenhouse-gas emissions of US light-duty vehicles. Nat. Clim. Chang. 2015, 5, 860–863. [Google Scholar] [CrossRef]
- Walker, W.E.; Marchau, V.A. Dynamic adaptive policymaking for the sustainable city: The case of automated taxis. Int. J. Transp. Sci. Technol. 2017, 6, 1–12. [Google Scholar] [CrossRef]
- Begg, D. A 2050 Vision for London: What Are the Implications of Driverless Transport? Transport Times: London, UK, 2014. [Google Scholar]
- Anderson, J.M.; Nidhi, K.; Stanley, K.D.; Sorensen, P.; Samaras, C.; Oluwatola, O.A. Autonomous Vehicle Technology: A Guide for Policymakers; Rand Corporation: Santa Monica, CA, USA, 2014. [Google Scholar]
- Greenblatt, J.B.; Shaheen, S. Automated vehicles, on-demand mobility, and environmental impacts. Curr. Sustain. Renew. Energy Rep. 2015, 2, 74–81. [Google Scholar] [CrossRef]
- Fagnant, D.J.; Kockelman, K.M.; Bansal, P. Operations of Shared Autonomous Vehicle Fleet for the Austin, Texas Market. Transp. Res. Rec. J. Transp. Res. Board 2015, 2536, 98–106. [Google Scholar] [CrossRef]
- Stocker, A.; Lazarus, J.; Becker, S.; Shaheen, S. North American College/University Market Carsharing Impacts: Results from Zipcar’s College Travel Study 2015; Transportation Research Sustainability Center: Berkeley, CA, USA, 2016. [Google Scholar]
- Burns, L.D. Sustainable mobility: A vision of our transport future. Nature 2013, 497, 181–182. [Google Scholar] [CrossRef] [PubMed]
- Burghout, W.; Rigole, P.J.; Andreasson, I. Impacts of shared autonomous taxis in a metropolitan area. In Proceedings of the 94th Annual Meeting of the Transportation Research Board, Washington, DC, USA, 11–15 January 2015. [Google Scholar]
- Sorrell, S. Energy, Economic Growth and Environmental Sustainability: Five Propositions. Sustainability 2010, 2, 1784–1809. [Google Scholar] [CrossRef]
- Walnum, H.J.; Aall, C. Transportation: Challenges to Curbing Greenhouse Gas Emissions from Road Freight Traffic. In Rethinking Climate and Energy Policies; Springer: Cham, Switzerland, 2016; pp. 243–266. [Google Scholar]
- Santarius, T.; Walnum, H.J.; Aall, C. Conclusions: Respecting Rebounds for Sustainability Reasons. In Rethinking Climate and Energy Policies; Springer: Cham, Switzerland, 2016; pp. 287–294. [Google Scholar]
- Becker, S. Rebound-Effekte bei privater Pkw-Nutzung: Versuch einer empirischen Annäherung. GAIA-Ecolog. Perspect. Sci. Soc. 2015, 24, 132–133. [Google Scholar] [CrossRef]
- Buhl, J.; von Geibler, J.; Echternacht, L.; Linder, M. Rebound effects in Living Labs: Opportunities for monitoring and mitigating re-spending and time use effects in user integrated innovation design. J. Clean. Prod. 2017, 151, 592–602. [Google Scholar] [CrossRef]
- Berkhout, P.H.; Muskens, J.C.; Velthuijsen, J.W. Defining the rebound effect. Energy Policy 2000, 28, 425–432. [Google Scholar] [CrossRef]
- Wang, Q.; Gao, Z.; Tang, H.; Yuan, X.; Zuo, J. Exploring the Direct Rebound Effect of Energy Consumption: A Case Study. Sustainability 2018, 10, 259. [Google Scholar] [CrossRef]
- Du, Q.; Li, Y.; Bai, L. The Energy Rebound Effect for the Construction Industry: Empirical Evidence from China. Sustainability 2017, 9, 803. [Google Scholar] [CrossRef]
- Cuijpers, C. An Empirical Investigation into the Economics of House Heating; Katholieke Universiteit Leuven, Centrum voor Economische Studiën: Leuven, Belgium, 1996. [Google Scholar]
- Klein, Y.L. An econometric model of the joint production and consumption of residential space heat. South. Econ. J. 1988, 55, 351–359. [Google Scholar] [CrossRef]
- Palmer, G. Does Energy Efficiency Reduce Emissions and Peak Demand? A Case Study of 50 Years of Space Heating in Melbourne. Sustainability 2012, 4, 1525–1560. [Google Scholar] [CrossRef]
- Dubin, J.A.; Miedema, A.K.; Chandran, R.V. Price effects of energy-efficient technologies: A study of residential demand for heating and cooling. RAND J. Econ. 1986, 17, 310–325. [Google Scholar] [CrossRef]
- Roy, J. The rebound effect: Some empirical evidence from India. Energy Policy 2000, 28, 433–438. [Google Scholar] [CrossRef]
- Schleich, J.; Mills, B.; Dütschke, E. A brighter future? Quantifying the rebound effect in energy efficient lighting. Energy Policy 2014, 72, 35–42. [Google Scholar] [CrossRef]
- Greening, L.A.; Greene, D.L.; Difiglio, C. Energy efficiency and consumption—The rebound effect—A survey. Energy Policy 2000, 28, 389–401. [Google Scholar] [CrossRef]
- Byun, J.; Park, S.; Jang, K. Rebound Effect or Induced Demand? Analyzing the Compound Dual Effects on VMT in the U.S. Sustainability 2017, 9, 219. [Google Scholar] [CrossRef]
- Chitnis, M.; Sorrell, S.; Druckman, A.; Firth, S.K.; Jackson, T. Turning lights into flights: Estimating direct and indirect rebound effects for UK households. Energy Policy 2013, 55, 234–250. [Google Scholar] [CrossRef]
- Schettkat, R. Analyzing Rebound Effects. In International Economics of Resource Efficiency; Bleischwitz, R., Welfens, P.J.J., Zhang, Z., Eds.; Physica-Verlag HD: Heidelberg, Germany, 2011; pp. 253–278. ISBN 978-3-7908-2600-5. [Google Scholar]
- Davidson, P.; Spinoulas, A. Driving alone versus riding together-How shared autonomous vehicles can change the way we drive. Road Transp. Res. J. Aust. N. Z. Res. Pract. 2016, 25, 51–66. [Google Scholar]
- KIT (Institut für Verkehrswesen, Karlsruher Institut für Technologie). German Mobility Panel; KIT: Karlsruge, Germany, 2017. [Google Scholar]
- Litman, T. Autonomous Vehicle Implementation Predictions; Victoria Transport Policy Institute: Victoria, BC, Canada, 2017. [Google Scholar]
- Pakusch, C.; Bossauer, P.; Shakoor, M.; Stevens, G. Using, Sharing, and Owning Smart Cars. In Proceedings of the 13th International Joint Conference on e-Business and Telecommunications (ICETE 2016), Lisbon, Portugal, 26–28 July 2016; Volume 2, pp. 19–30. [Google Scholar]
- Ravi Sekhar, C. Mode Choice Analysis: The Data, the Models and Future Ahead. Int. J. Traffic Transp. Eng. 2014. [Google Scholar] [CrossRef]
- Jou, R.-C.; Hensher, D.A.; Liu, Y.-H.; Chiu, C.-S. Urban commuters’ mode-switching behaviour in Taipai, with an application of the bounded rationality principle. Urban Stud. 2010, 47, 650–665. [Google Scholar] [CrossRef]
- Simon, H.A. A behavioral model of rational choice. Q. J. Econ. 1955, 69, 99–118. [Google Scholar] [CrossRef]
- Train, K.E. Discrete Choice Methods with Simulation; Cambridge University Press: Cambridge, UK, 2009; ISBN 1-139-48037-5. [Google Scholar]
- Lancaster, K.J. A new approach to consumer theory. J. Political Econ. 1966, 74, 132–157. [Google Scholar] [CrossRef]
- Steg, L. Can public transport compete with the private car? IATSS Res. 2003, 27, 27–35. [Google Scholar] [CrossRef]
- Gardner, B.; Abraham, C. What drives car use? A grounded theory analysis of commuters’ reasons for driving. Transp. Res. Part F Traffic Psychol. Behav. 2007, 10, 187–200. [Google Scholar] [CrossRef]
- Howard, D.; Dai, D. Public perceptions of self-driving cars: The case of Berkeley, California. In Proceedings of the Transportation Research Board 93rd Annual Meeting, Washington, DC, USA, 12–16 January 2014; Volume 14. [Google Scholar]
- Pakusch, C.; Bossauer, P. User Acceptance of Fully Autonomous Public Transport. In Proceedings of the 14th International Joint Conference on e-Business and Telecommunications (ICETE 2017), Madrid, Spain, 26–28 July 2017; Volume 2, pp. 52–60. [Google Scholar]
- Franzen, A. Umweltbewusstsein und Verkehrsverhalten-Empirische Analysen zur Verkehrsmittelwahl und der Akzeptanz Umweltpolitischer Massnahmen; Rueegger Verlag: Zurich, Switzerland, 1997. [Google Scholar]
- Wödl, S.; Pakusch, C.; Bossauer, P.; Stevens, G. Auswirkungen vollautomatisierter PKWs auf die Verkehrsmittelwahl. Int. Verkehrswesen 2017, 69, 68–72. [Google Scholar]
- Pakusch, C.; Weber, T.; Stevens, G.; Bossauer, P. Akzeptanz autonomer Verkehrsmittel: Eine Analyse relativer Mehrwerte selbstfahrender Autos im Vergleich zu heutigen Verkehrsmitteln. In Proceedings of the Tagungsband Wirtschaftsinformatik 2018, Data Driven X—Turning Data into Value, Lünerburg, Germany, 6–9 March 2018; pp. 938–949. [Google Scholar]
- Cyganski, R.; Fraedrich, E.; Lenz, B. Travel-time valuation for automated driving: A use-case-driven study. In Proceedings of the 94th Annual Meeting of the TRB, Washington, DC, USA, 11–15 January 2015. [Google Scholar]
- Eimler, S.C.; Geisler, S. Zur Akzeptanz Autonomen Fahrens-Eine A-Priori Studie. In Mensch & Computer Workshopband; Walter de Gruyter GmbH: Berlin, Germany, 2015; pp. 533–540. [Google Scholar]
- Nordhoff, S. Mobility 4.0: Are Consumers Ready to Adopt Google’s Self-Driving Car? University of Twente: Enschede, The Netherlands, 2014. [Google Scholar]
- Schoettle, B.; Sivak, M. A survey of public opinion about connected vehicles in the US, the UK, and Australia. In Proceedings of the 2014 International Conference on Connected Vehicles and Expo (ICCVE), Vienna, Austria, 3–7 November 2014; pp. 687–692. [Google Scholar]
- Kyriakidis, M.; Happee, R.; de Winter, J.C. Public opinion on automated driving: Results of an international questionnaire among 5000 respondents. Transp. Res. Part F Traffic Psychol. Behav. 2015, 32, 127–140. [Google Scholar] [CrossRef]
- David, H.A. The Method of Paired Comparisons; Griffin: London, UK, 1963; Volume 12. [Google Scholar]
- Rahman, F.; Yoshida, S.; Kojima, A.; Kubota, H. Paired Comparison Method to Prioritize Traffic Calming Projects. J. East. Asia Soc. Transp. Stud. 2015, 11, 2472–2487. [Google Scholar]
- Bortz, J.; Döring, N. Forschungsmethoden und Evaluation; Springer: Berlin, Germany, 2013. [Google Scholar]
- Agresti, A. An Introduction to Categorical Data Analysis; Wiley: New York, NY, USA, 1996; Volume 135. [Google Scholar]
- NIST. Binomial Proportion Test; National Institute of Standards and Technology: Gaithersburg, MD, USA, 2015. [Google Scholar]
- Bamberg, S.; Ajzen, I.; Schmidt, P. Choice of travel mode in the theory of planned behavior: The roles of past behavior, habit, and reasoned action. Basic Appl. Soc. Psychol. 2003, 25, 175–187. [Google Scholar] [CrossRef]
- Nordhoff, S.; van Arem, B.; Merat, N.; Madigan, R.; Ruhrort, L.; Knie, A.; Happee, R. User Acceptance of Driverless Shuttles Running in an Open and Mixed Traffic Environment. In Proceedings of the 12th ITS European Congress, Strasbourg, France, 19–22 June 2017. [Google Scholar]
- Agarwal, R.; Prasad, J. Are individual differences germane to the acceptance of new information technologies? Decis. Sci. 1999, 30, 361–391. [Google Scholar] [CrossRef]
- Kim, K.; Ahn, S.J.G. The Role of Gamification in Enhancing Intrinsic Motivation to Use a Loyalty Program. J. Interact. Mark. 2017, 40, 41–51. [Google Scholar] [CrossRef]
- Vlahogianni, E.I.; Barmpounakis, E.N. Gamification and sustainable mobility: Challenges and opportunities in a changing transportation landscape. Low Carbon Mobil. Futur. Cities Princ. Appl. 2017, 6. [Google Scholar] [CrossRef]
- Kazhamiakin, R.; Marconi, A.; Perillo, M.; Pistore, M.; Valetto, G.; Piras, L.; Avesani, F.; Perri, N. Using gamification to incentivize sustainable urban mobility. In Proceedings of the 2015 IEEE First International Smart Cities Conference (ISC2), Guadalajara, Mexico, 25–28 October 2015; pp. 1–6. [Google Scholar]
- Meurer, J.; Stein, M.; Randall, D.; Rohde, M.; Wulf, V. Social dependency and mobile autonomy: Supporting older adults’ mobility with ridesharing ICT. In Proceedings of the SIGCHI Conference on Human Factors in Computing Systems, Toronto, ON, Canada, 26 April–1 May 2014; ACM: New York, NY, USA, 2014; pp. 1923–1932. [Google Scholar]
- Stein, M.; Meurer, J.; Boden, A.; Wulf, V. Mobility in Later Life: Appropriation of an Integrated Transportation Platform. In Proceedings of the 2017 CHI Conference on Human Factors in Computing Systems, Denver, CO, USA, 6–11 May 2017; ACM: New York, NY, USA, 2017; pp. 5716–5729. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
| P40 | P205 | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| P40 | C 1 | AC | CS | ACS | PT | Total | P205 | C 1 | AC | CS | ACS | PT | Total |
| C | 0 | 1 | 0 | 1 | 2 | C | 1 | 1 | 1 | 1 | 4 | ||
| AC | 1 | 1 | 1 | 1 | 4 | AC | 0 | 0 | 1 | 1 | 2 | ||
| CS | 0 | 0 | 0 | 1 | 1 | CS | 0 | 1 | 1 | 0 | 2 | ||
| ACS | 1 | 0 | 1 | 1 | 3 | ACS | 0 | 0 | 0 | 1 | 1 | ||
| PT | 0 | 0 | 0 | 0 | 0 | PT | 0 | 0 | 1 | 0 | 1 | ||
| Consistency coefficient: 1.0 | Consistency coefficient: 1.0 | ||||||||||||
| C 1 | AC | CS | ACS | PT | Total | Utility Scale Value | (±CI) | Rank | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| num | % | num | % | num | % | num | % | num | % | ||||||||||
| C | 180 | 59.6 | * 2 | 249 | 82.5 | * | 237 | 78.5 | * | 223 | 73.8 | * | 889 | 1.00 | (±0.08) | 1 | |||
| AC | 122 | 40.4 | * | 199 | 65.9 | * | 224 | 74.2 | * | 193 | 63.9 | * | 738 | 0.63 | (±0.06) | 2 | |||
| CS | 53 | 17.5 | * | 103 | 34.1 | * | 124 | 41.1 | * | 122 | 40.4 | * | 402 | 0.24 | (±0.03) | 5 | |||
| ACS | 65 | 21.5 | * | 78 | 25.8 | * | 178 | 58.9 | * | 160 | 53.0 | 481 | 0.30 | (±0.03) | 4 | ||||
| PT | 79 | 26.2 | * | 109 | 36.1 | * | 180 | 59.6 | * | 142 | 47.0 | 510 | 0.33 | (±0.04) | 3 | ||||
| Today | Future | |||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Type | Total | C 1 | CS | PT | Sum 2 | p3 | C | AC | CS | ACS | PT | Sum | p | |||||||||
| N | % | n | % | n | % | n | % | N | n | % | n | % | n | % | n | % | n | % | N | |||
| 302 | 100 | 204 | 70.3 | 25 | 8.6 | 61 | 21.0 | 290 | 128 | 45.4 | 68 | 24.1 | 13 | 4.6 | 31 | 11.0 | 42 | 14.9 | 282 | |||
| Residence | ||||||||||||||||||||||
| rural | 127 | 42.1 | 102 | 82.3 | 10 | 8.1 | 12 | 9.7 | 124 | 0.00 | 72 | 58.1 | 29 | 23.4 | 5 | 4 | 8 | 6.5 | 10 | 8.1 | 124 | 0.00 |
| urban | 175 | 57.9 | 85 | 60.7 | 12 | 8.6 | 43 | 30.7 | 140 | 56 | 35.4 | 39 | 24.7 | 8 | 5.1 | 23 | 14.6 | 32 | 20.3 | 158 | ||
| Car Owner | ||||||||||||||||||||||
| yes | 242 | 80.1 | 190 | 80.6 | 15 | 6.4 | 30 | 12.8 | 235 | 0.00 | 117 | 51.1 | 61 | 26.6 | 8 | 3.5 | 20 | 8.7 | 23 | 10.0 | 229 | 0.00 |
| no | 60 | 19.9 | 14 | 25.5 | 10 | 18.2 | 31 | 56.4 | 55 | 11 | 20.8 | 7 | 13.2 | 5 | 9.4 | 11 | 20.8 | 19 | 35.9 | 53 | ||
| Age | ||||||||||||||||||||||
| <25 | 95 | 31.5 | 64 | 70.3 | 7 | 7.7 | 20 | 22.0 | 91 | 0.15 | 43 | 47.8 | 16 | 17.8 | 4 | 4.4 | 13 | 14.4 | 14 | 15.6 | 90 | 0.03 |
| 25–50 | 139 | 46.0 | 92 | 69.7 | 8 | 6.1 | 32 | 24.2 | 132 | 52 | 40.9 | 40 | 31.5 | 3 | 2.4 | 10 | 7.9 | 22 | 17.3 | 127 | ||
| >50 | 68 | 22.5 | 48 | 71.6 | 10 | 14.9 | 9 | 13.4 | 67 | 33 | 50.8 | 12 | 18.5 | 6 | 9.2 | 8 | 12.3 | 6 | 9.2 | 65 | ||
| High School | ||||||||||||||||||||||
| no | 42 | 22.8 | 33 | 82.5 | 2 | 5.0 | 5 | 12.5 | 40 | 0.14 | 25 | 67.6 | 5 | 13.5 | 2 | 5.4 | 2 | 5.4 | 3 | 8.1 | 37 | 0.01 |
| yes | 233 | 77.2 | 151 | 66.8 | 22 | 9.7 | 53 | 23.5 | 226 | 90 | 40.7 | 57 | 25.8 | 10 | 4.5 | 27 | 12.2 | 37 | 16.7 | 221 | ||
| Gender | ||||||||||||||||||||||
| female | 154 | 51.0 | 99 | 68.6 | 13 | 9.0 | 32 | 22.2 | 144 | 0.84 | 64 | 44.4 | 33 | 22.9 | 33 | 22.9 | 13 | 9.0 | 28 | 19.4 | 144 | 0.24 |
| male | 148 | 49 | 105 | 71.9 | 12 | 8.2 | 29 | 19.9 | 146 | 64 | 46.4 | 35 | 23.6 | 35 | 5.1 | 18 | 13.0 | 14 | 10.1 | 138 | ||
| Income | ||||||||||||||||||||||
| <1300€ | 124 | 41.1 | 78 | 65.0 | 11 | 9.2 | 31 | 25.8 | 120 | 0.36 | 49 | 42.2 | 25 | 21.6 | 25 | 21.6 | 14 | 12.1 | 22 | 19.0 | 116 | 0.49 |
| 1300–2600€ | 72 | 23.8 | 49 | 73.1 | 4 | 6.0 | 14 | 20.9 | 67 | 34 | 52.3 | 12 | 18.5 | 12 | 18.5 | 8 | 12.3 | 9 | 13.8 | 65 | ||
| >2600€ | 106 | 35.1 | 77 | 74.8 | 10 | 9.7 | 16 | 15.5 | 103 | 45 | 44.6 | 31 | 30.7 | 31 | 30.7 | 9 | 8.9 | 11 | 10.9 | 101 | ||
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pakusch, C.; Stevens, G.; Boden, A.; Bossauer, P. Unintended Effects of Autonomous Driving: A Study on Mobility Preferences in the Future. Sustainability 2018, 10, 2404. https://doi.org/10.3390/su10072404
Pakusch C, Stevens G, Boden A, Bossauer P. Unintended Effects of Autonomous Driving: A Study on Mobility Preferences in the Future. Sustainability. 2018; 10(7):2404. https://doi.org/10.3390/su10072404
Chicago/Turabian StylePakusch, Christina, Gunnar Stevens, Alexander Boden, and Paul Bossauer. 2018. "Unintended Effects of Autonomous Driving: A Study on Mobility Preferences in the Future" Sustainability 10, no. 7: 2404. https://doi.org/10.3390/su10072404
APA StylePakusch, C., Stevens, G., Boden, A., & Bossauer, P. (2018). Unintended Effects of Autonomous Driving: A Study on Mobility Preferences in the Future. Sustainability, 10(7), 2404. https://doi.org/10.3390/su10072404