Daily Monitoring of Shallow and Fine-Grained Water Patterns in Wet Grasslands Combining Aerial LiDAR Data and In Situ Piezometric Measurements

Abstract
1. Introduction
2. Materials and Methods
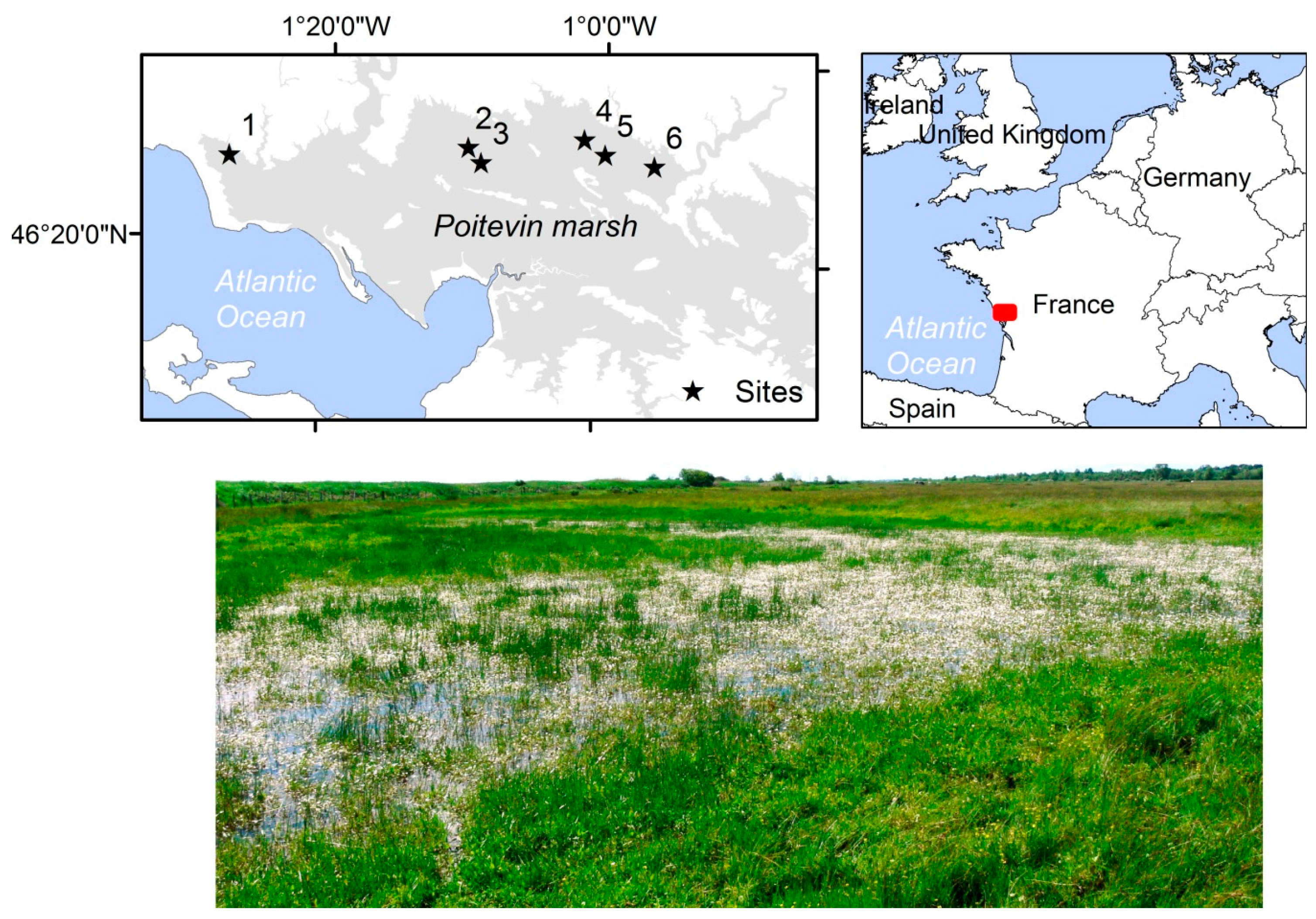
2.1. Study Area
2.2. Data Collection and Pre-Processing
2.3. Model Calibration and Validation
2.4. Spatiotemporal Monitoring and Characterization of the Flood Patterns
3. Results
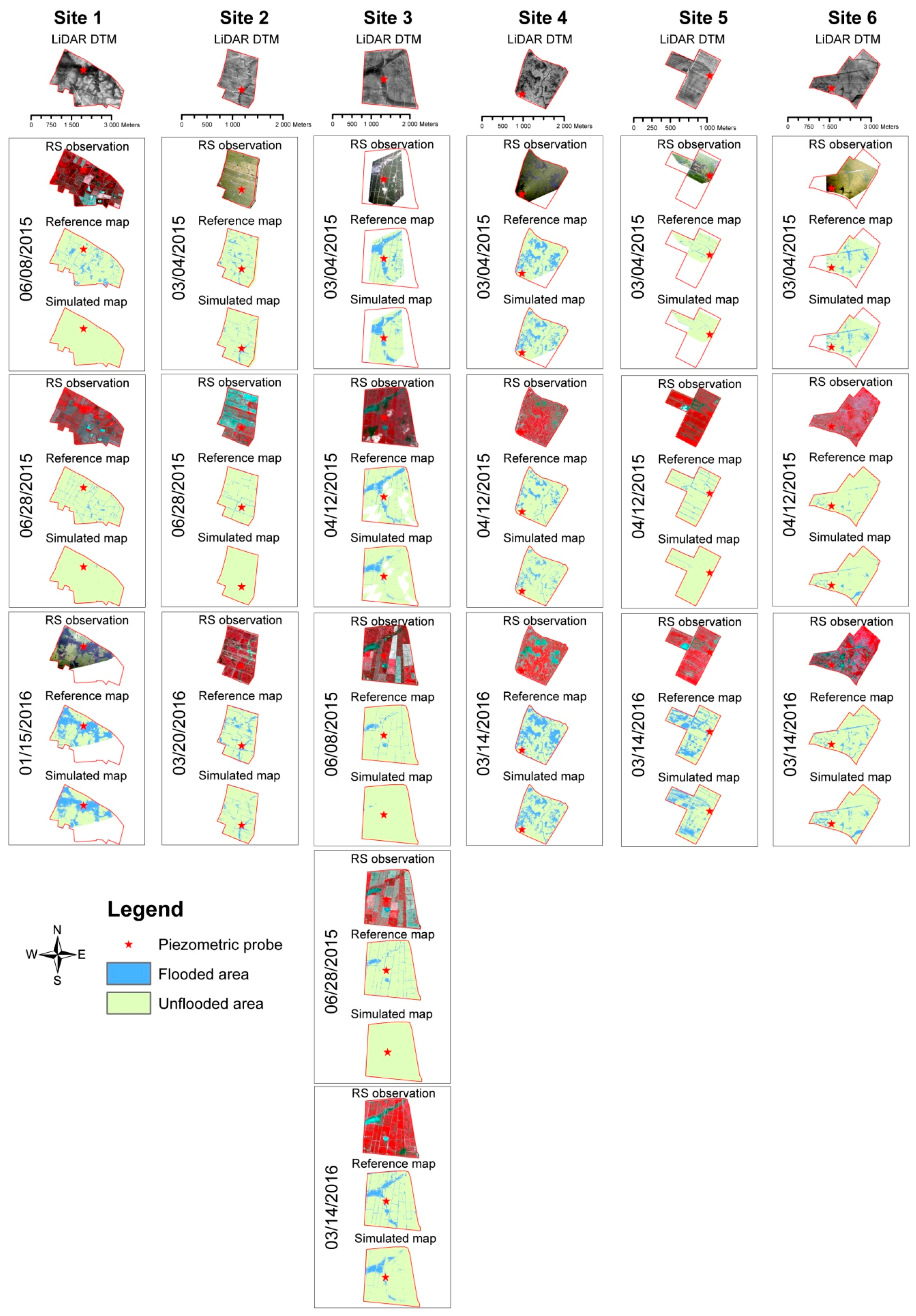
3.1. Accuracy Assessment
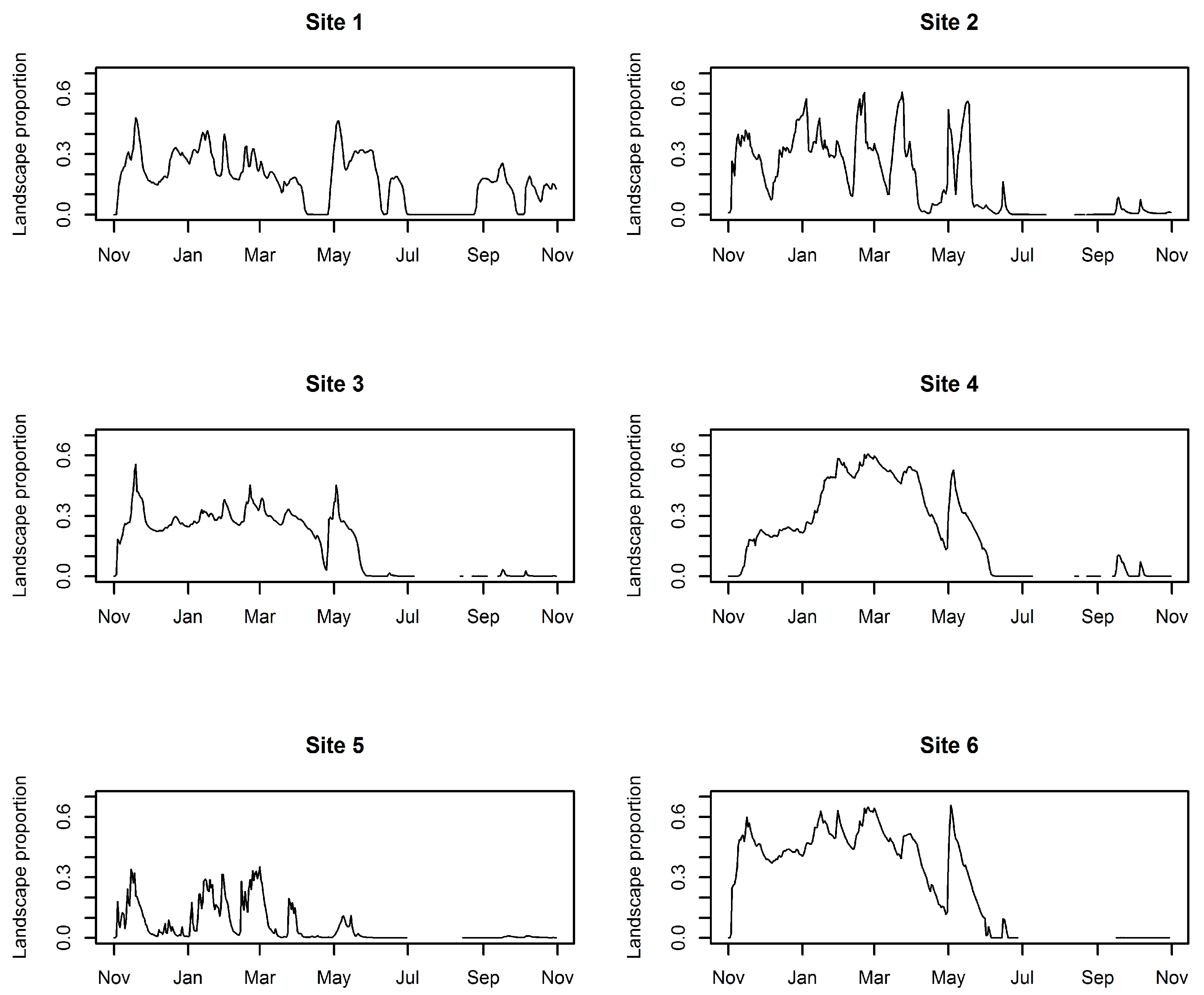
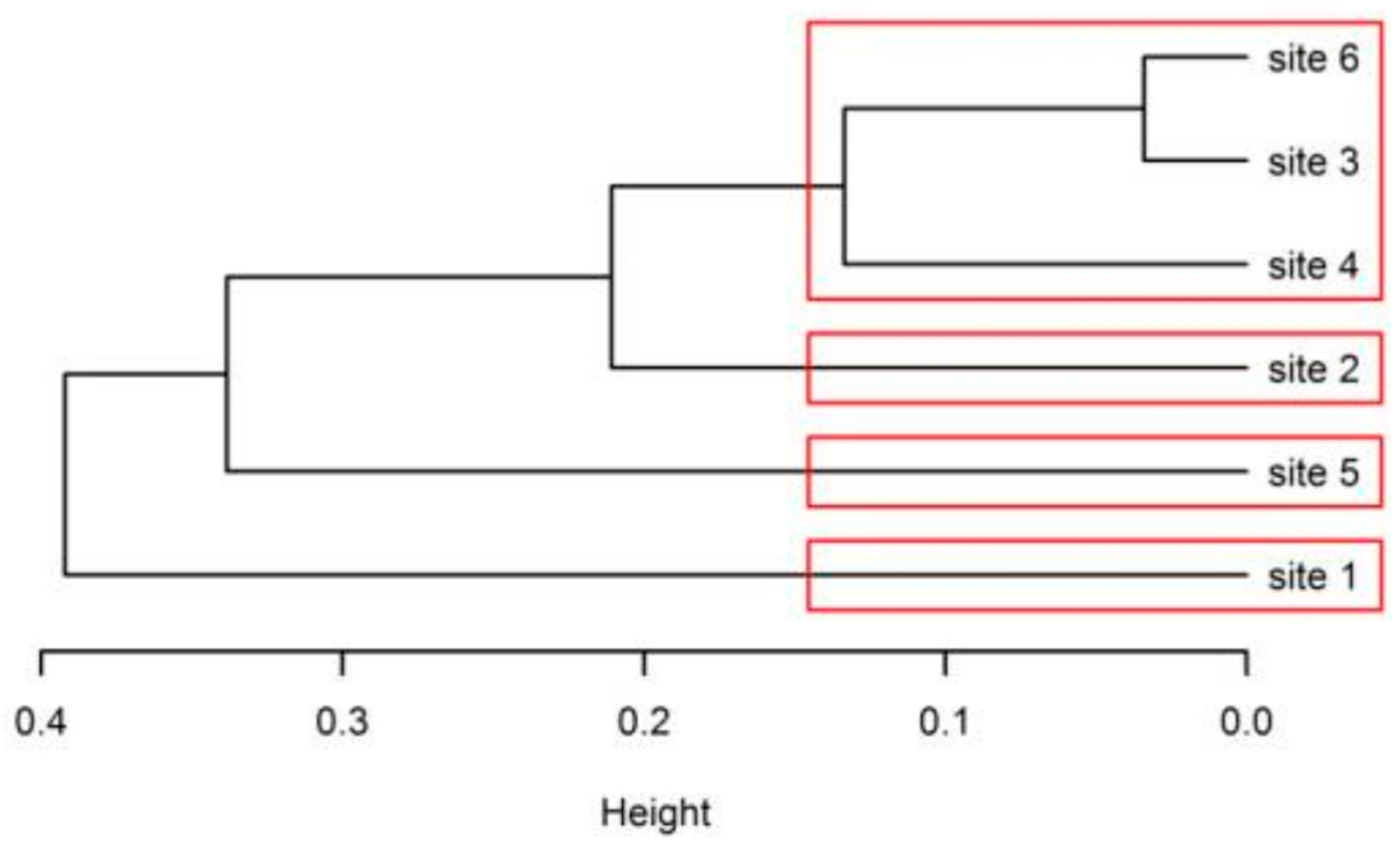
3.2. Spatiotemporal Characterization of the Flood Patterns
4. Discussion
4.1. Model Performance and Limitations
4.2. Toward a Better Knowledge of Ecohydrological Processes
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Maltby, E.; Barker, T. The Wetlands Handbook; Wiley-Blackwell: Oxford, UK, 2009. [Google Scholar]
- Acreman, M.; Holden, J. How wetlands affect floods. Wetlands 2013, 33, 773–786. [Google Scholar] [CrossRef]
- Surridge, B.W.J.; Heathwaite, A.L.; Baird, A.J. Phosphorus mobilisation and transport within a long-restored floodplain wetland. Ecol. Eng. 2012, 44, 348–359. [Google Scholar] [CrossRef]
- Violle, C.; Bonis, A.; Plantegenest, M.; Cudennec, C.; Damgaard, C.; Marion, B.; Le Cœur, D.; Bouzillé, J.-B. Plant functional traits capture species richness variations along a flooding gradient. Oikos 2011, 120, 389–398. [Google Scholar] [CrossRef]
- Żmihorski, M.; Pärt, T.; Gustafson, T.; Berg, Å. Effects of water level and grassland management on alpha and beta diversity of birds in restored wetlands. J. Appl. Ecol. 2016, 53, 587–595. [Google Scholar] [CrossRef]
- Lefebvre, G.; Germain, C.; Poulin, B. Contribution of rainfall vs. water management to Mediterranean wetland hydrology: Development of an interactive simulation tool to foster adaptation to climate variability. Environ. Model. Softw. 2015, 74, 39–47. [Google Scholar] [CrossRef]
- Dash, J.; Ogutu, B.O. Recent advances in space-borne optical remote sensing systems for monitoring global terrestrial ecosystems. Prog. Phys. Geogr. 2016, 40, 322–351. [Google Scholar] [CrossRef]
- Yan, K.; Di Baldassarre, G.; Solomatine, D.P.; Schumann, G.J.-P. A review of low-cost space-borne data for flood modelling: Topography, flood extent and water level. Hydrol. Process. 2015, 29, 3368–3387. [Google Scholar] [CrossRef]
- Marti-Cardona, B.; Dolz-Ripolles, J.; Lopez-Martinez, C. Wetland inundation monitoring by the synergistic use of ENVISAT/ASAR imagery and ancilliary spatial data. Remote Sens. Environ. 2013, 139, 171–184. [Google Scholar] [CrossRef]
- Cazals, C.; Rapinel, S.; Frison, P.-L.; Bonis, A.; Mercier, G.; Mallet, C.; Corgne, S.; Rudant, J.-P. Mapping and characterization of hydrological dynamics in a coastal marsh using high temporal resolution sentinel-1A images. Remote Sens. 2016, 8, 570. [Google Scholar] [CrossRef]
- Malinowski, R.; Höfle, B.; Koenig, K.; Groom, G.; Schwanghart, W.; Heckrath, G. Local-scale flood mapping on vegetated floodplains from radiometrically calibrated airborne LiDAR data. ISPRS J. Photogramm. Remote Sens. 2016, 119, 267–279. [Google Scholar] [CrossRef]
- Malinowski, R.; Groom, G.; Schwanghart, W.; Heckrath, G. Detection and delineation of localized flooding from worldview-2 multispectral data. Remote Sens. 2015, 7, 14853–14875. [Google Scholar] [CrossRef]
- Bates, P.D. Integrating remote sensing data with flood inundation models: How far have we got? Hydrol. Process. 2012, 26, 2515–2521. [Google Scholar] [CrossRef]
- Jung, Y.; Merwade, V. Uncertainty quantification in flood inundation mapping using generalized likelihood uncertainty estimate and sensitivity analysis. J. Hydrol. Eng. 2012, 17, 507–520. [Google Scholar] [CrossRef]
- Hopkinson, C.; Chasmer, L.E.; Sass, G.; Creed, I.F.; Sitar, M.; Kalbfleisch, W.; Treitz, P. Vegetation class dependent errors in lidar ground elevation and canopy height estimates in a boreal wetland environment. Can. J. Remote Sens. 2005, 31, 191–206. [Google Scholar] [CrossRef]
- Costabile, P.; Macchione, F.; Natale, L.; Petaccia, G. Flood mapping using LIDAR DEM. Limitations of the 1-D modeling highlighted by the 2-D approach. Nat. Hazards 2015, 77, 181–204. [Google Scholar] [CrossRef]
- Maksimović, Č.; Prodanović, D.; Boonya-Aroonnet, S.; Leitão, J.P.; Djordjević, S.; Allitt, R. Overland flow and pathway analysis for modelling of urban pluvial flooding. J. Hydraul. Res. 2009, 47, 512–523. [Google Scholar] [CrossRef]
- Ozdemir, H.; Sampson, C.; de Almeida, G.A.; Bates, P.D. Evaluating scale and roughness effects in urban flood modelling using terrestrial LIDAR data. Hydrol. Earth Syst. Sci. 2013, 10, 5903–5942. [Google Scholar] [CrossRef]
- Bates, P.D.; Marks, K.J.; Horritt, M.S. Optimal use of high-resolution topographic data in flood inundation models. Hydrol. Process. 2003, 17, 537–557. [Google Scholar] [CrossRef]
- Liu, Q.Q.; Singh, V.P. Effect of microtopography, slope length and gradient, and vegetative cover on overland flow through simulation. J. Hydrol. Eng. 2004, 9, 375–382. [Google Scholar] [CrossRef]
- Özgen, I.; Teuber, K.; Simons, F.; Liang, D.; Hinkelmann, R. Upscaling the shallow water model with a novel roughness formulation. Environ. Earth Sci. 2015, 74, 7371–7386. [Google Scholar] [CrossRef]
- Huang, S.; Young, C.; Feng, M.; Heidemann, K.; Cushing, M.; Mushet, D.M.; Liu, S. Demonstration of a conceptual model for using LiDAR to improve the estimation of floodwater mitigation potential of Prairie Pothole Region wetlands. J. Hydrol. 2011, 405, 417–426. [Google Scholar] [CrossRef]
- Costabile, P.; Costanzo, C.; Macchione, F. A storm event watershed model for surface runoff based on 2D fully dynamic wave equations. Hydrol. Process. 2013, 27, 554–569. [Google Scholar] [CrossRef]
- Yang, J.; Chu, X. A new modeling approach for simulating microtopography-dominated, discontinuous overland flow on infiltrating surfaces. Adv. Water Resour. 2015, 78, 80–93. [Google Scholar] [CrossRef]
- Negishi, J.N.; Sagawa, S.; Sanada, S.; Kume, M.; Ohmori, T.; Miyashita, T.; Kayaba, Y. Using airborne scanning laser altimetry (LiDAR) to estimate surface connectivity of floodplain water bodies. River Res. Appl. 2012, 28, 258–267. [Google Scholar] [CrossRef]
- Lang, M.; McDonough, O.; McCarty, G.; Oesterling, R.; Wilen, B. Enhanced detection of wetland-stream connectivity using lidar. Wetlands 2012, 32, 461–473. [Google Scholar] [CrossRef]
- Hauer, C.; Mandlburger, G.; Schober, B.; Habersack, H. Morphologically related integrative management concept for reconnecting abandoned channels based on airborne lidar data and habitat modelling. River Res. Appl. 2014, 30, 537–556. [Google Scholar] [CrossRef]
- Džubáková, K.; Piégay, H.; Riquier, J.; Trizna, M. Multi-scale assessment of overflow-driven lateral connectivity in floodplain and backwater channels using LiDAR imagery. Hydrol. Process. 2015, 29, 2315–2330. [Google Scholar] [CrossRef]
- Shook, K.; Pomeroy, J.W.; Spence, C.; Boychuk, L. Storage dynamics simulations in prairie wetland hydrology models: Evaluation and parameterization. Hydrol. Process. 2013, 27, 1875–1889. [Google Scholar] [CrossRef]
- Cazorzi, F.; Fontana, G.D.; Luca, A.D.; Sofia, G.; Tarolli, P. Drainage network detection and assessment of network storage capacity in agrarian landscape. Hydrol. Process. 2013, 27, 541–553. [Google Scholar] [CrossRef]
- Maclean, I.M.D.; Bennie, J.J.; Scott, A.J.; Wilson, R.J. A high-resolution model of soil and surface water conditions. Ecol. Model. 2012, 237, 109–119. [Google Scholar] [CrossRef]
- Duncan, P.; Hewison, A.J.M.; Houte, S.; Rosoux, R.; Tournebize, T.; Dubs, F.; Burel, F.; Bretagnolle, V. Long-term changes in agricultural practices and wildfowling in an internationally important wetland, and their effects on the guild of wintering ducks. J. Appl. Ecol. 1999, 36, 11–23. [Google Scholar] [CrossRef]
- Council Directive 92/43/EEC Conservation of natural habitats and of wild flora and fauna. Int. J. Eur. Commun. 1992, L206, 7–49.
- Laben, C.A.; Brower, B.V. Process for Enhancing the Spatial Resolution of Multispectral Imagery Using Pan-Sharpening. U.S. Patent US6011875, 4 January 2000. [Google Scholar]
- Blaschke, T. Object based image analysis for remote sensing. ISPRS J. Photogramm. Remote Sens. 2010, 65, 2–16. [Google Scholar] [CrossRef]
- Pontius, R.; Millones, M. Death to Kappa: Birth of quantity disagreement and allocation disagreement for accuracy assessment. Int. J. Remote Sens. 2011, 32, 4407–4429. [Google Scholar] [CrossRef]
- Paparrizos, J.; Gravano, L. K-Shape: Efficient and Accurate Clustering of Time Series. In Proceedings of the 2015 ACM SIGMOD International Conference on Management of Data (SIGMOD ’15), Melbourne, Australia, 31 May–4 June 2015; ACM: New York, NY, USA, 2015; pp. 1855–1870. [Google Scholar]
- Sarda-Espinosa, A. Dtwclust: Time Series Clustering Along with Optimizations for the Dynamic Time Warping Distance. Available online: https://cran.r-project.org/web/packages/dtwclust/index.html (accessed on 28 February 2018).
- Hladik, C.; Alber, M. Accuracy assessment and correction of a LIDAR-derived salt marsh digital elevation model. Remote Sens. Environ. 2012, 121, 224–235. [Google Scholar] [CrossRef]
- Golden, H.E.; Lane, C.R.; Amatya, D.M.; Bandilla, K.W.; Raanan Kiperwas, H.; Knightes, C.D.; Ssegane, H. Hydrologic connectivity between geographically isolated wetlands and surface water systems: A review of select modeling methods. Environ. Model. Softw. 2014, 53, 190–206. [Google Scholar] [CrossRef]
- Keys, T.A.; Jones, C.N.; Scott, D.T.; Chuquin, D. A cost-effective image processing approach for analyzing the ecohydrology of river corridors. Limnol. Oceanogr. Methods 2016, 14, 359–369. [Google Scholar] [CrossRef][Green Version]
- Kadlec, R.H. Overland flow in wetlands: Vegetation resistance. J. Hydraul. Eng. 1990, 116, 691–706. [Google Scholar] [CrossRef]
- McDonough, O.T.; Lang, M.W.; Hosen, J.D.; Palmer, M.A. Surface hydrologic connectivity between delmarva bay wetlands and nearby streams along a gradient of agricultural alteration. Wetlands 2014, 35, 41–53. [Google Scholar] [CrossRef]
- Legleiter, C.J.; Overstreet, B.T.; Glennie, C.L.; Pan, Z.; Fernandez-Diaz, J.C.; Singhania, A. Evaluating the capabilities of the CASI hyperspectral imaging system and Aquarius bathymetric LiDAR for measuring channel morphology in two distinct river environments. Earth Surf. Process. Landf. 2016, 41, 344–363. [Google Scholar] [CrossRef]
- Krause, S.; Lewandowski, J.; Dahm, C.N.; Tockner, K. Frontiers in real-time ecohydrology—A paradigm shift in understanding complex environmental systems. Ecohydrology 2015, 8, 529–537. [Google Scholar] [CrossRef]
- Wassen, M.J.; Peeters, W.H.M.; Venterink, H.O. Patterns in vegetation, hydrology, and nutrient availability in an undisturbed river floodplain in Poland. Plant Ecol. 2003, 165, 27–43. [Google Scholar] [CrossRef]
- Ma, Y.; Wu, H.; Wang, L.; Huang, B.; Ranjan, R.; Zomaya, A.; Jie, W. Remote sensing big data computing: Challenges and opportunities. Future Gener. Comput. Syst. 2015, 51, 47–60. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Site | Area (ha) | Min–Max Altimetry (meters) | Ditch Density (meters/ha) | Land Owner | Flood Retention |
|---|---|---|---|---|---|
| 1 | 215 | 1.4–2.6 | 87 | Private | Yes |
| 2 | 68 | 1.8–2.9 | 163 | Private | No |
| 3 | 103 | 1.2–2.3 | 114 | Private | Yes |
| 4 | 95 | 1.9–2.7 | 79 | Municipal | Yes |
| 5 | 15 | 1.9–3.0 | 233 | Private | No |
| 6 | 167 | 2.1–3.1 | 54 | Municipal | Yes |
| Acquisition Date | Sensor | Spatial Resolution | Site Coverage |
|---|---|---|---|
| 4 March 2015 | Microlight aircraft | 1.0 m | 2, 3, 4, 5, 6 |
| 12 April 2015 | SPOT-6 | 1.5 m | 3, 4, 5, 6 |
| 8 June 2015 | SPOT-6 | 1.5 m | 1, 3 |
| 28 June 2015 | SPOT-7 | 1.5 m | 1, 2, 3 |
| 15 January 2016 | Microlight aircraft | 1.0 m | 1 |
| 14 March 2016 | SPOT-7 | 1.5 m | 3, 4, 5, 6 |
| 20 March 2016 | SPOT-6 | 1.5 m | 2 |
| Site 1 | Site 2 | Site 3 | Site 4 | Site 5 | Site 6 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Calibration | Offset (cm) | 26 | 18 | 18 | 16 | 06 | 19 | ||||||
| Validation | Date | OA | Kloc | OA | Kloc | OA | Kloc | OA | Kloc | OA | Kloc | OA | Kloc |
| 4 March 2015 | na | na | 89.5 | 0.39 | 82.3 | 0.73 | 79.9 | 0.78 | 93.8 | 0.42 | 91.9 | 0.75 | |
| 12 April 2015 | na | na | na | na | 87.4 | 0.64 | 87.5 | 0.55 | 92.9 | 0.58 | 94.4 | 0.43 | |
| 8 June 2015 | 88.9 | 0.42 | na | na | 94.1 | 0.88 | na | na | na | na | na | na | |
| 28 June 2015 | 92.9 | 0.24 | 94.6 | 0.81 | 93.0 | 0.98 | na | na | na | na | na | na | |
| 15 January 2016 | 84.7 | 0.82 | na | na | na | na | na | na | na | na | na | na | |
| 14 March 2016 | na | na | na | na | 89.4 | 0.64 | 79.7 | 0.77 | 76.0 | 0.48 | 88.2 | 0.41 | |
| 20 March 2016 | na | na | 85.5 | 0.53 | na | na | na | na | na | na | na | na | |
| Mean | 88.8 | 0.49 | 89.9 | 0.58 | 89.2 | 0.77 | 82.3 | 0.70 | 87.6 | 0.49 | 91.5 | 0.53 | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rapinel, S.; Rossignol, N.; Gore, O.; Jambon, O.; Bouger, G.; Mansons, J.; Bonis, A. Daily Monitoring of Shallow and Fine-Grained Water Patterns in Wet Grasslands Combining Aerial LiDAR Data and In Situ Piezometric Measurements. Sustainability 2018, 10, 708. https://doi.org/10.3390/su10030708
Rapinel S, Rossignol N, Gore O, Jambon O, Bouger G, Mansons J, Bonis A. Daily Monitoring of Shallow and Fine-Grained Water Patterns in Wet Grasslands Combining Aerial LiDAR Data and In Situ Piezometric Measurements. Sustainability. 2018; 10(3):708. https://doi.org/10.3390/su10030708
Chicago/Turabian StyleRapinel, Sébastien, Nicolas Rossignol, Oliver Gore, Olivier Jambon, Guillaume Bouger, Jérome Mansons, and Anne Bonis. 2018. "Daily Monitoring of Shallow and Fine-Grained Water Patterns in Wet Grasslands Combining Aerial LiDAR Data and In Situ Piezometric Measurements" Sustainability 10, no. 3: 708. https://doi.org/10.3390/su10030708
APA StyleRapinel, S., Rossignol, N., Gore, O., Jambon, O., Bouger, G., Mansons, J., & Bonis, A. (2018). Daily Monitoring of Shallow and Fine-Grained Water Patterns in Wet Grasslands Combining Aerial LiDAR Data and In Situ Piezometric Measurements. Sustainability, 10(3), 708. https://doi.org/10.3390/su10030708