
Demagnetization Fault Diagnosis for PMSM Drive System with Dual Extended Kalman Filter


Abstract
1. Introduction
2. Parameter Mismatch Caused by Demagnetization
3. Proposed Demagnetization Fault Diagnosis Method
3.1. Inductance Calculation Based on Recursive Least Square
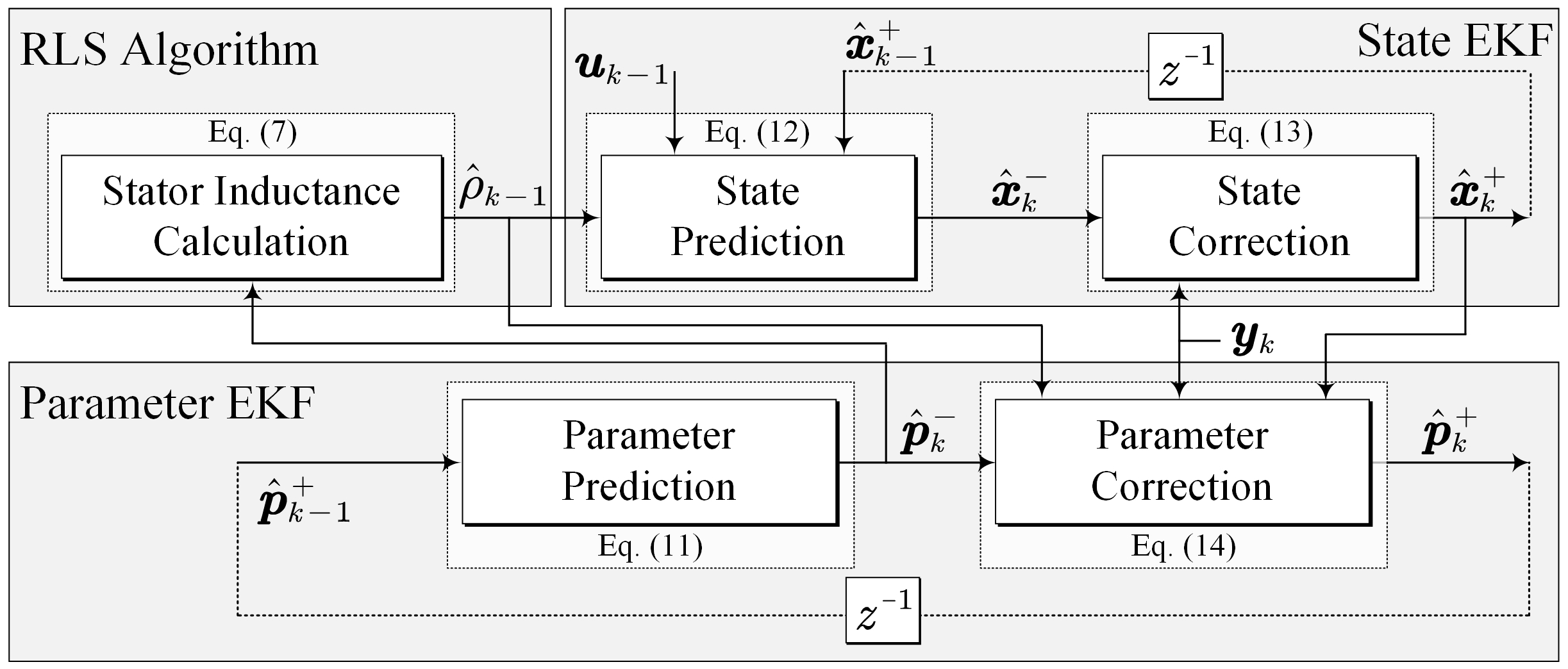
3.2. Flux Linkage Estimatation Based on Dual Extended Kalman Filter
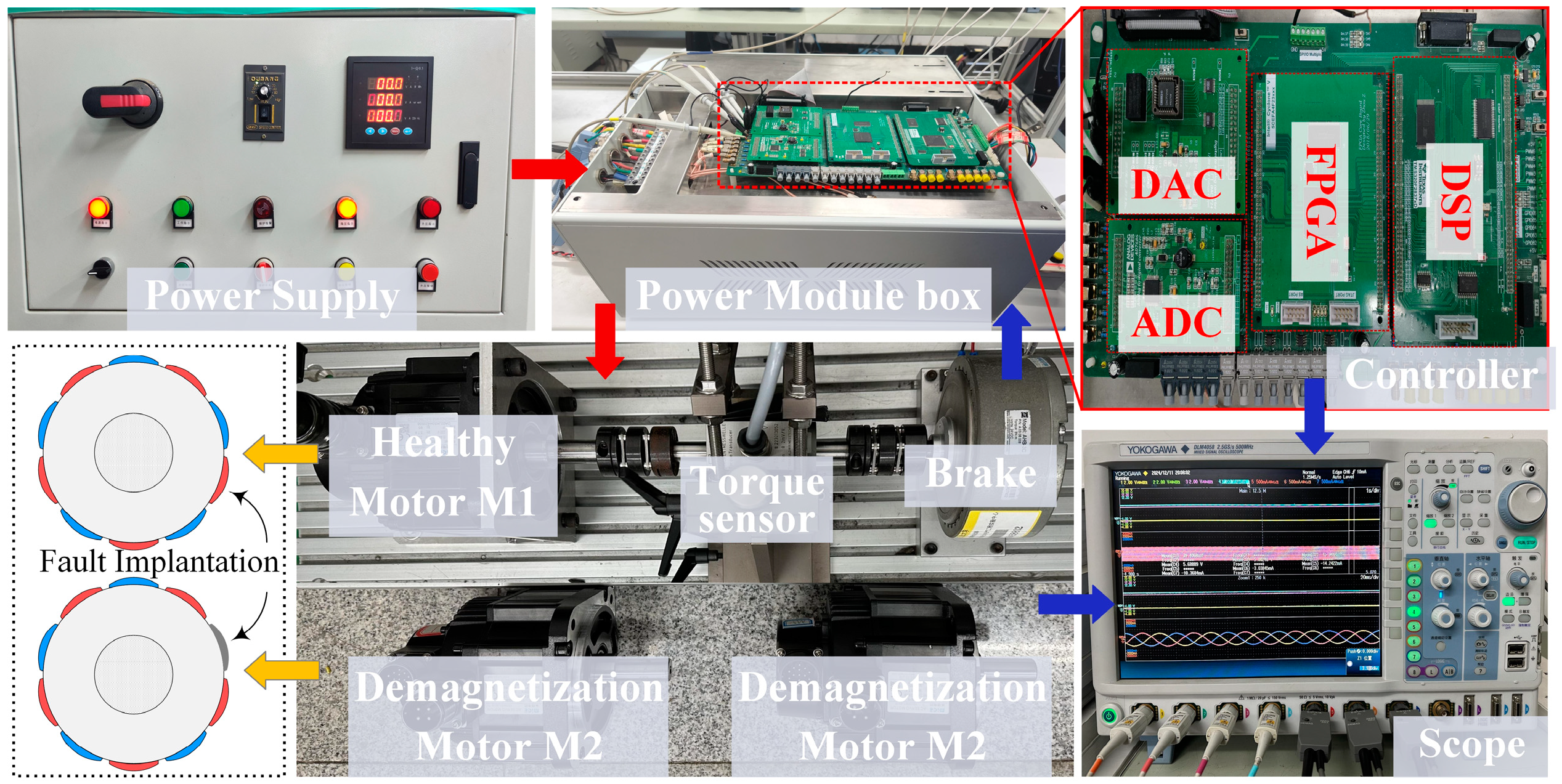
4. Experimental Results
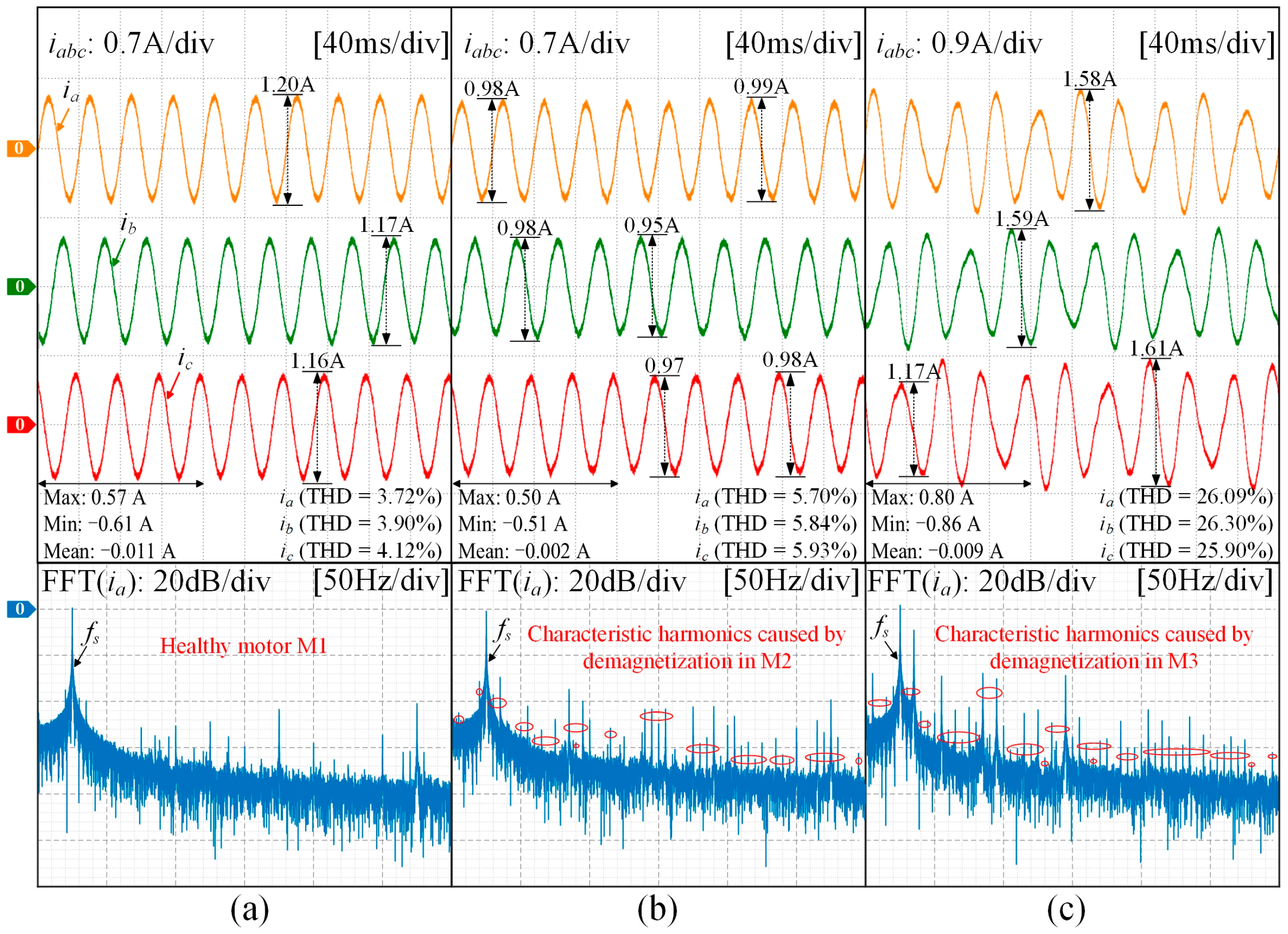
4.1. FFT Analysis of Stator Current After Demagnetization
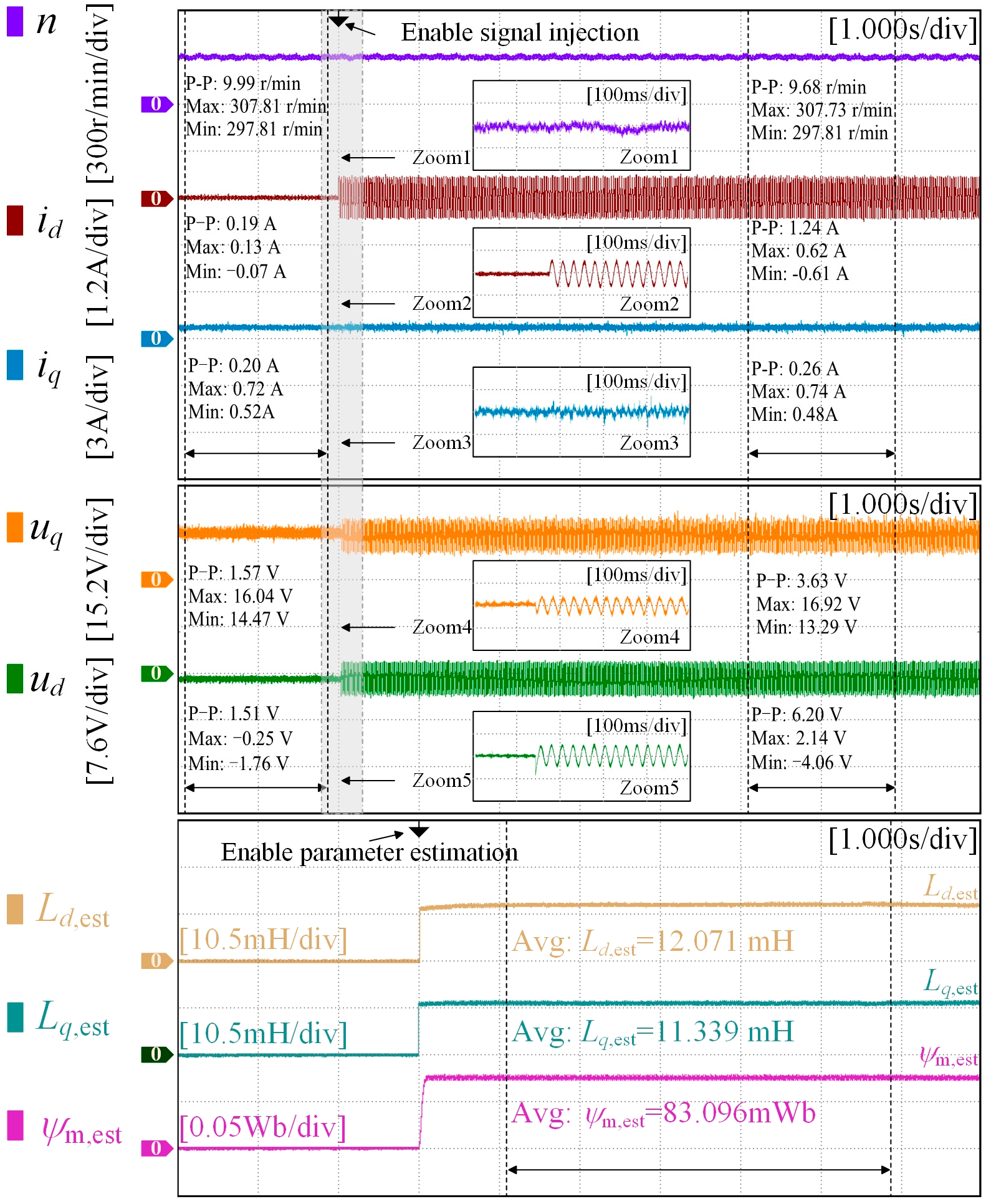
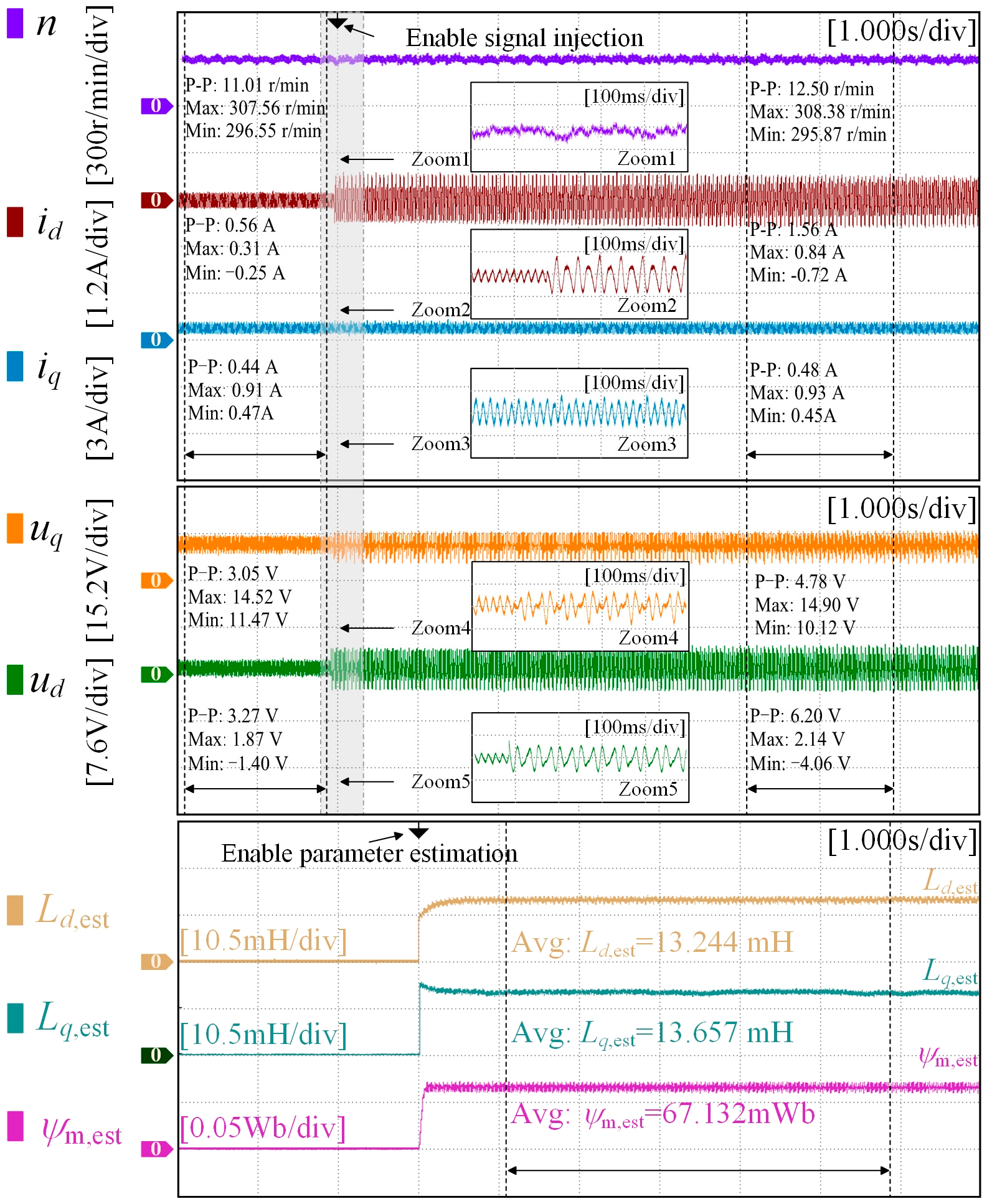
4.2. Experimental Results of Proposed Fault Diagnosis Method
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Faiz, J.; Mazaheri-Tehrani, E. Demagnetization Modeling and Fault Diagnosing Techniques in Permanent Magnet Machines Under Stationary and Nonstationary Conditions: An Overview. IEEE Trans. Ind. Appl. 2016, 53, 2772–2785. [Google Scholar] [CrossRef]
- Lv, K.; Wang, D.; Huang, W.; Hu, J. Research on Fault Indicator for Integrated Fault Diagnosis System of PMSM Based on Stator Tooth Flux. IEEE J. Emerg. Sel. Top. Power Electron. 2023, 12, 985–996. [Google Scholar] [CrossRef]
- Ai, Q.; Wei, H.; Li, T.; Dou, H.; Zhao, W.; Zhang, Y. Online Demagnetization Fault Recognition for Permanent Magnet Motors Based on the Hall-Effect Analog Sampling. IEEE Trans. Power Electron. 2022, 38, 3600–3611. [Google Scholar] [CrossRef]
- Orviz, M.; Laborda, D.F.; Reigosa, D.; Lee, H.J.; Rafaq, M.S.; Lee, S.B.; Briz, F. Demagnetization Detection and Severity Assessment in PMSMs Using Search Coils Exploiting Machine’s Symmetry. IEEE Trans. Ind. Appl. 2023, 59, 4021–4034. [Google Scholar] [CrossRef]
- Kang, J.K.; Yoo, D.W.; Hur, J. Application and Verification of Voltage Angle-Based Fault Diagnosis Method in Six-Phase IPMSM. IEEE Trans. Ind. Appl. 2023, 60, 426–438. [Google Scholar] [CrossRef]
- Ko, Y.; Lee, Y.; Oh, J.; Park, J.; Chang, H.; Kim, N. Current signature identification and analysis for demagnetization fault diagnosis of permanent magnet synchronous motors. Mech. Syst. Signal Process. 2024, 214, 111377. [Google Scholar] [CrossRef]
- Garcia-Calva, T.A.; Gyftakis, K.N.; Skarmoutsos, G.A.; Mueller, M.; Morinigo-Sotelo, D.; Romero-Troncoso, R.D.J. Advanced Signal Processing Techniques for Demagnetization Detection in PM Generators at Variable Speed. IEEE Trans. Ind. Appl. 2023, 60, 174–183. [Google Scholar] [CrossRef]
- Zhan, H.; Wu, L.; Lyu, Z.; Du, Y.; Fang, Y. Uneven Demagnetization Fault Diagnosis in Dual Three-Phase Permanent Magnet Machines Based on Electrical Signal Difference. IEEE Trans. Transp. Electrif. 2022, 9, 3026–3039. [Google Scholar] [CrossRef]
- Zhu, M.; Hu, W.; Kar, N.C. Acoustic Noise-Based Uniform Permanent-Magnet Demagnetization Detection in SPMSM for High-Performance PMSM Drive. IEEE Trans. Transp. Electrif. 2017, 4, 303–313. [Google Scholar] [CrossRef]
- Attestog, S.; Senanayaka, J.S.L.; Khang, H.V.; Robbersmyr, K.G. Robust Active Learning Multiple Fault Diagnosis of PMSM Drives With Sensorless Control Under Dynamic Operations and Imbalanced Datasets. IEEE Trans. Ind. Inform. 2022, 19, 9291–9301. [Google Scholar] [CrossRef]
- Zhu, M.; Yang, B.; Hu, W.; Feng, G.; Kar, N.C. Vold–Kalman Filtering Order Tracking Based Rotor Demagnetization Detection in PMSM. IEEE Trans. Ind. Appl. 2019, 55, 5768–5778. [Google Scholar] [CrossRef]
- Du, B.; Huang, W.; Cheng, Y.; Chen, J.; Tao, R.; Cui, S. Fault Diagnosis and Separation of PMSM Rotor Faults Using Search Coil Based on MVSA and Random Forests. IEEE Trans. Ind. Electron. 2024, 71, 15089–15099. [Google Scholar] [CrossRef]
- Gao, C.; Gao, B.; Xu, X.; Si, J.; Hu, Y. Automatic Demagnetization Fault Location of Direct-Drive Permanent Magnet Synchronous Motor Using Knowledge Graph. IEEE Trans. Instrum. Meas. 2024, 73, 3502312. [Google Scholar] [CrossRef]
- Skowron, M.; Orlowska-Kowalska, T.; Kowalski, C.T. Detection of Permanent Magnet Damage of PMSM Drive Based on Direct Analysis of the Stator Phase Currents Using Convolutional Neural Network. IEEE Trans. Ind. Electron. 2022, 69, 13665–13675. [Google Scholar] [CrossRef]
- Song, J.; Zhao, J.; Zhang, X.; Dong, F.; Zhao, J.; Xu, L.; Yao, Z. Accurate Demagnetization Faults Detection of Dual-Sided Permanent Magnet Linear Motor Using Enveloping and Time-Domain Energy Analysis. IEEE Trans. Ind. Inform. 2019, 16, 6334–6346. [Google Scholar] [CrossRef]
- Zhang, M.; Li, W.; Tang, H. Demagnetization Fault Diagnosis of the Permanent Magnet Motor for Electric Vehicles Based on Temperature Characteristic Quantity. IEEE Trans. Transp. Electrif. 2022, 9, 759–770. [Google Scholar]
- Xie, J.; Long, Z.; Zhang, X.; Qin, G.; Huang, F.; Rao, Z. Demagnetization Fault Diagnosis of PMSM Using Custom Phase Space Reconstruction Image. IEEE Trans. Instrum. Meas. 2023, 72, 3526211. [Google Scholar] [CrossRef]
- Huang, F.; Zhang, X.; Qin, G.; Xie, J.; Peng, J.; Huang, S.; Long, Z.; Tang, Y. Demagnetization Fault Diagnosis of Permanent Magnet Synchronous Motors Using Magnetic Leakage Signals. IEEE Trans. Ind. Inform. 2022, 19, 6105–6116. [Google Scholar] [CrossRef]
- Song, J.; Zhao, J.; Dong, F.; Zhao, J.; Xu, L.; Yao, Z. A New Demagnetization Fault Recognition and Classification Method for DPMSLM. IEEE Trans. Ind. Inform. 2019, 16, 1559–1570. [Google Scholar] [CrossRef]
- Zhang, X.; Tang, J.; Qu, Y.; Qin, G.; Guo, L.; Xie, J.; Long, Z. Few-Shot Fault Diagnosis Based on Heterogeneous Information Fusion and Meta Learning. IEEE Sens. J. 2023, 23, 21433–21442. [Google Scholar] [CrossRef]
- Zhao, K.; Yin, T.; Zhang, C.; He, J.; Li, X.; Chen, Y.; Zhou, R.; Leng, A. Robust model-free nonsingular terminal sliding mode control for PMSM demagnetization fault. IEEE Access 2019, 7, 15737–15748. [Google Scholar] [CrossRef]
- Kang, Y.; Yao, L. Sliding mode observer-based fault diagnosis and continuous control set fault tolerant control for PMSM with demagnetization fault. Measurement 2024, 235, 114867. [Google Scholar] [CrossRef]
- Wang, Q.; Wang, G.; Xiong, X.; Li, Q.; Li, B.; Zhang, G.; Chang, J.; Xu, D. Magnetic Flux Linkage Estimation of PMSM Based on Split Step Decoupling Strategy. IEEE Trans. Transp. Electrif. 2024, 11, 3996–4009. [Google Scholar] [CrossRef]
- Zhao, J.; Wang, L.; Xu, L.; Dong, F.; Song, J.; Yang, X. Uniform Demagnetization Diagnosis for Permanent-Magnet Synchronous Linear Motor Using a Sliding-Mode Velocity Controller and an ALN-MRAS Flux Observer. IEEE Trans. Ind. Electron. 2021, 69, 890–899. [Google Scholar] [CrossRef]
- Wen, D.; Wei, X.; Zhang, W.; Li, S.; Zhang, Y. Improved Supertwisting Nonsingular Fast Terminal Sliding Mode Observer-Based Deadbeat Fault-Tolerant Predictive Control for IPMSM Demagnetization Fault. IEEE Trans. Power Electron. 2024, 39, 13643–13658. [Google Scholar] [CrossRef]
- Yin, S.; Li, X.; Gao, J.; Chen, A.; Han, Y. A Novel Demagnetization Fault Diagnosis Scheme for the IPM Motor Without Parameter Estimation. IEEE Trans. Power Electron. 2024, 39, 15468–15473. [Google Scholar] [CrossRef]
- Zhao, K.; Leng, A.; Zhou, R.; Dai, W.; Wu, S.; Li, T. Demagnetization fault reconstruction for six-phase permanent magnet synchronous motor by improved super-twisting algorithm-based sliding-mode observer. Measurement 2021, 172, 108905. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Symbols | M1 | M2 | M3 |
|---|---|---|---|---|
| Number of pole-pairs | p | 5 | 5 | 5 |
| Rated current | IN | 3.7 A | 3.7 A | 3.7 A |
| Permanent magnet flux | ψm | 0.0843 Wb | 0.0836 Wb | 0.0696 Wb |
| Stator resistance | Rs | 1.203 Ω | 1.226 Ω | 1.275 Ω |
| d-axis inductance | Ld | 11.51 mH | 11.91 mH | 13.82 mH |
| q-axis inductance | Lq | 11.93 mH | 12.54 mH | 14.37 mH |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Published by MDPI on behalf of the World Electric Vehicle Association. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, J.; Li, C.; Zhou, Z. Demagnetization Fault Diagnosis for PMSM Drive System with Dual Extended Kalman Filter. World Electr. Veh. J. 2025, 16, 112. https://doi.org/10.3390/wevj16020112
Wang J, Li C, Zhou Z. Demagnetization Fault Diagnosis for PMSM Drive System with Dual Extended Kalman Filter. World Electric Vehicle Journal. 2025; 16(2):112. https://doi.org/10.3390/wevj16020112
Chicago/Turabian StyleWang, Jiahan, Chen Li, and Zhanqing Zhou. 2025. "Demagnetization Fault Diagnosis for PMSM Drive System with Dual Extended Kalman Filter" World Electric Vehicle Journal 16, no. 2: 112. https://doi.org/10.3390/wevj16020112
APA StyleWang, J., Li, C., & Zhou, Z. (2025). Demagnetization Fault Diagnosis for PMSM Drive System with Dual Extended Kalman Filter. World Electric Vehicle Journal, 16(2), 112. https://doi.org/10.3390/wevj16020112