
Fast Finite-Time Composite Controller for Vehicle Steer-by-Wire Systems with Communication Delays


Abstract
1. Introduction
- A dynamical model for the SBW system is systematically formulated to incorporate the inherent time delays in the transmission channel connecting the hand wheel and the steering actuation module. Moreover, the model accommodates parametric system uncertainties and external disturbances.
- A new control strategy, denoted by the FFTCC, is devised to address the challenge of rapid finite-time convergence of tracking errors in the time-delayed SBW systems. This proposed fast finite-time convergent observer-based control is specifically designed to accommodate the time delays inherent in the transmission channel, ensuring robust performance in different communication scenarios.
- A new fast-scaling finite-time ESO is constructed to estimate unmeasured velocity variables and the unknown overall disturbances in rapid finite-time instances. By integrating the unmeasured variable and the lumped perturbations into the proposed FFTCC, the proposed composite control scheme is explicitly realized. The overall closed-loop stability is proved as global finite time by the Lyapunov theory.
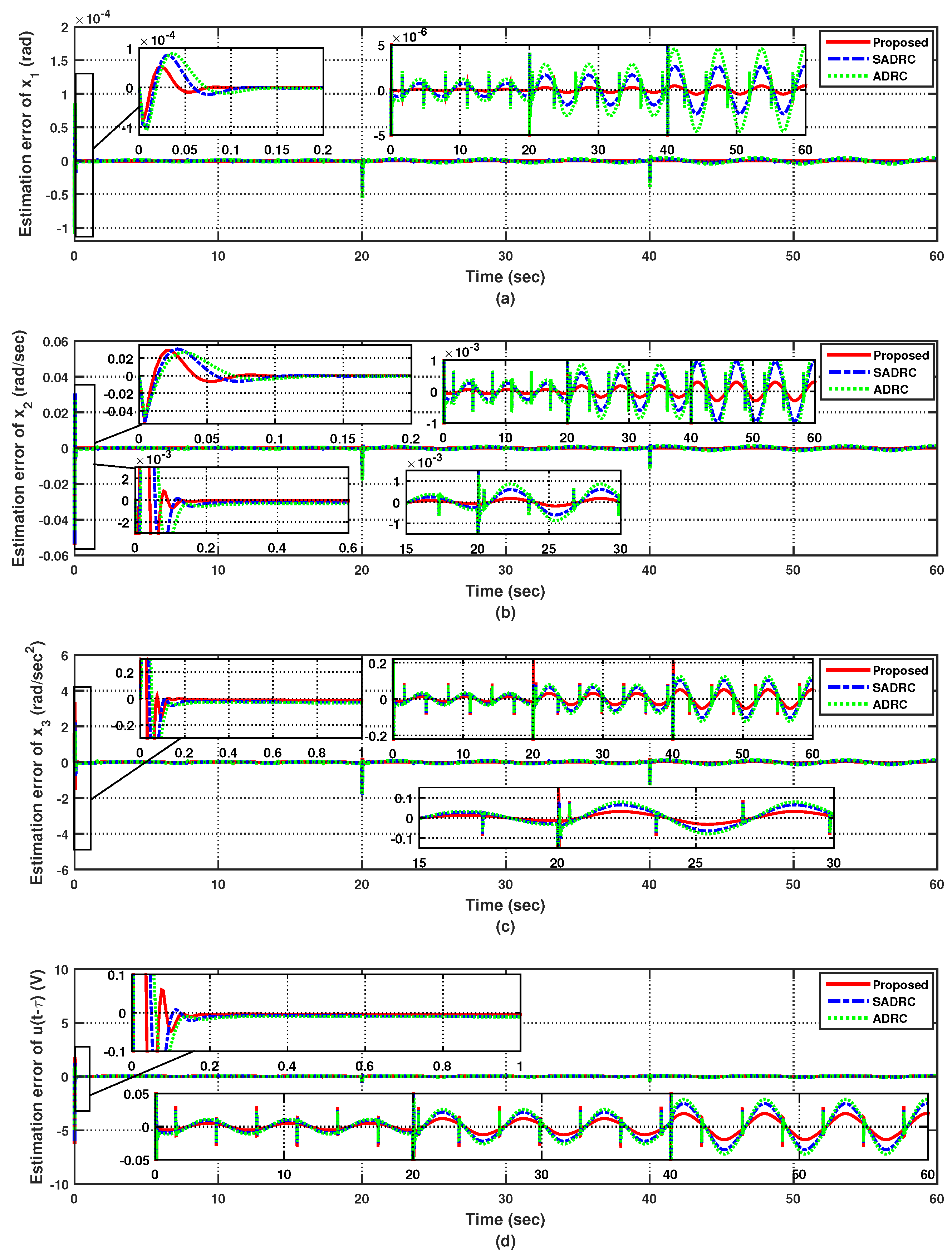
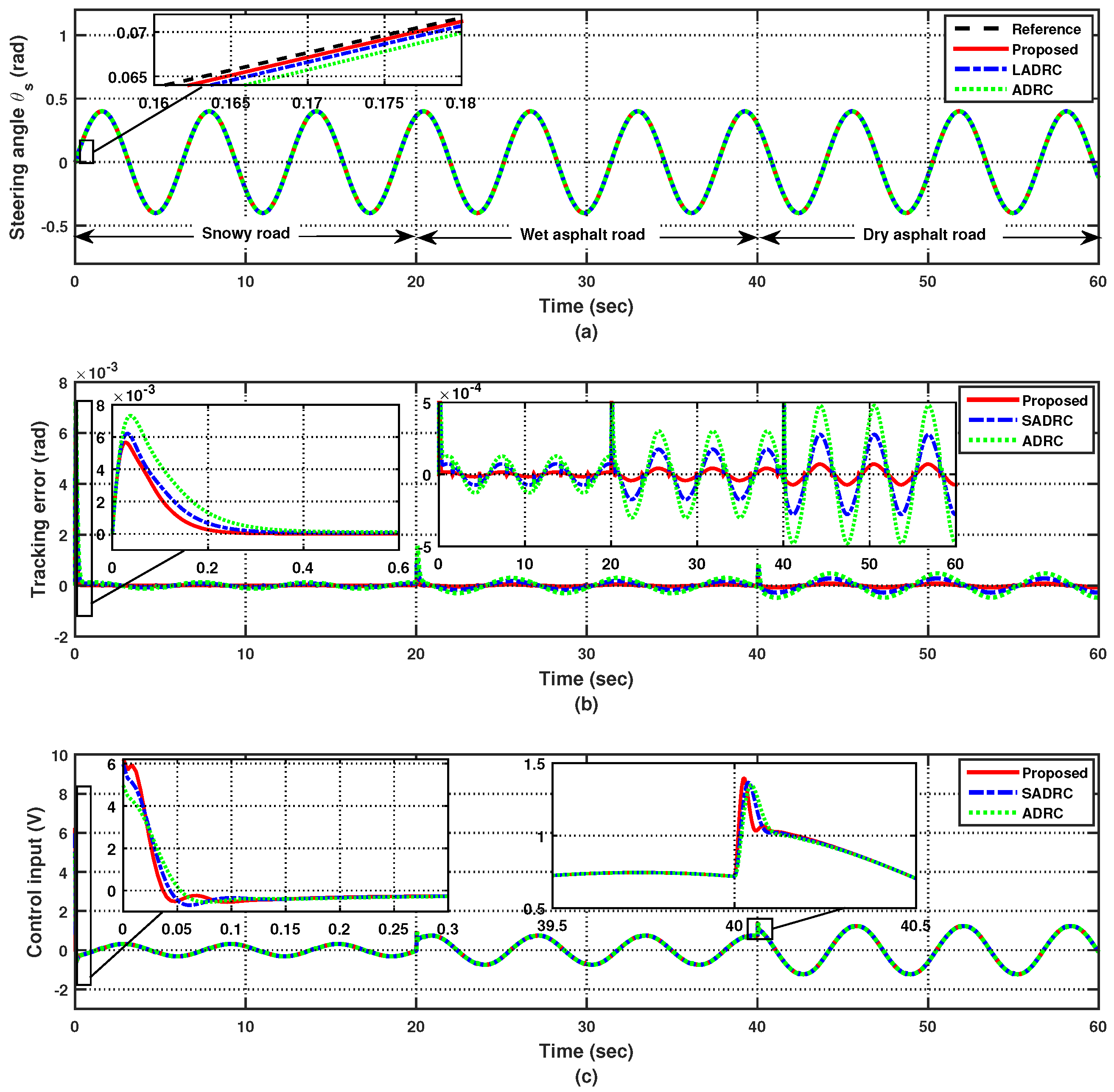
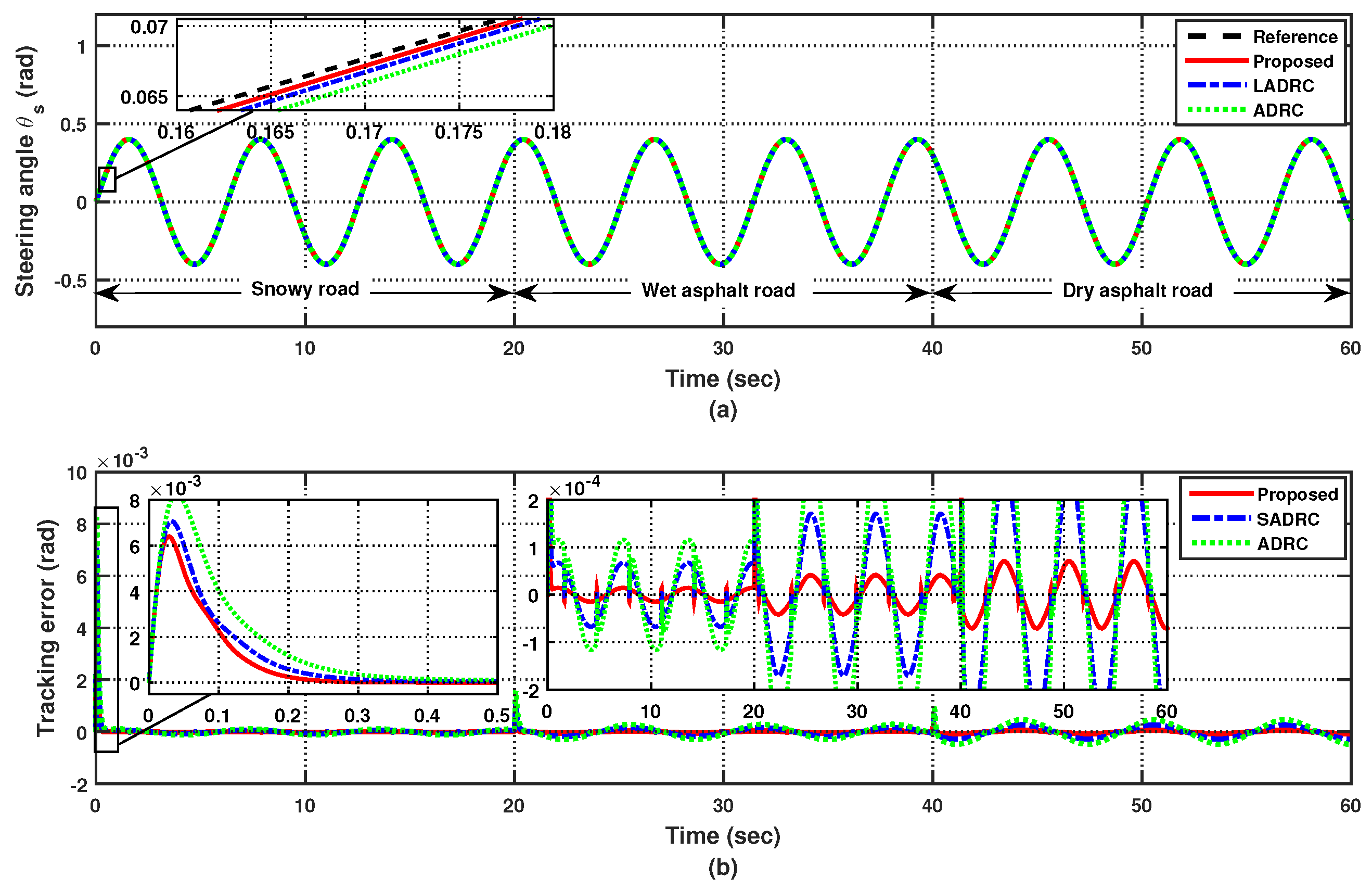
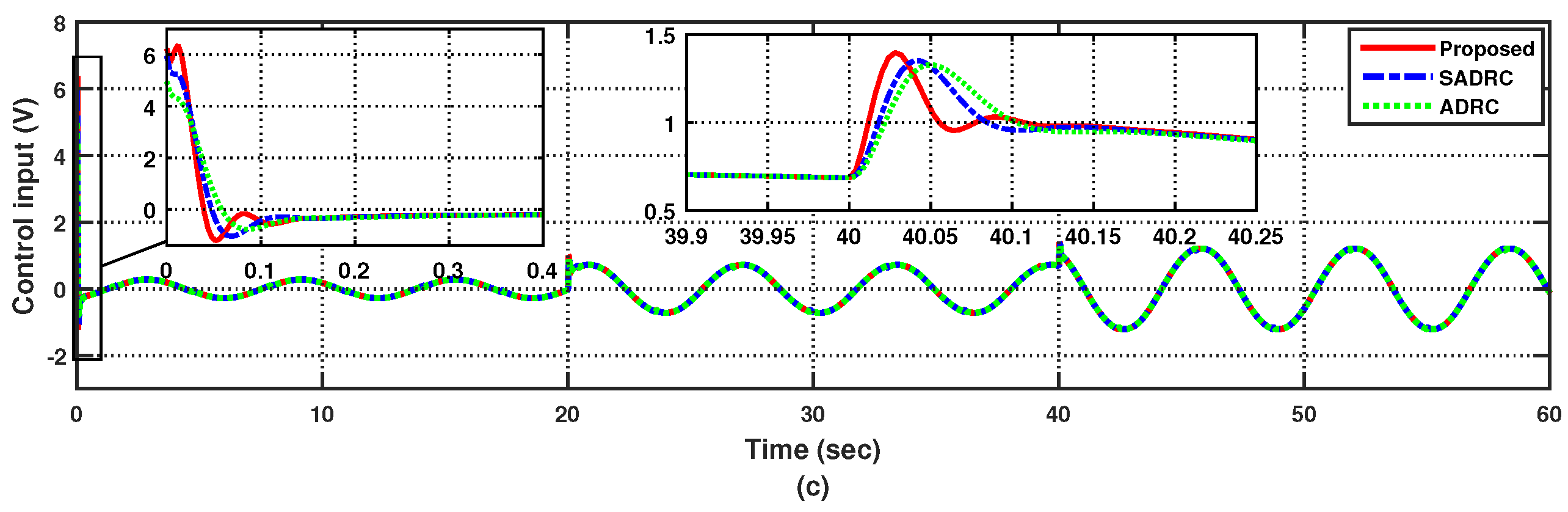
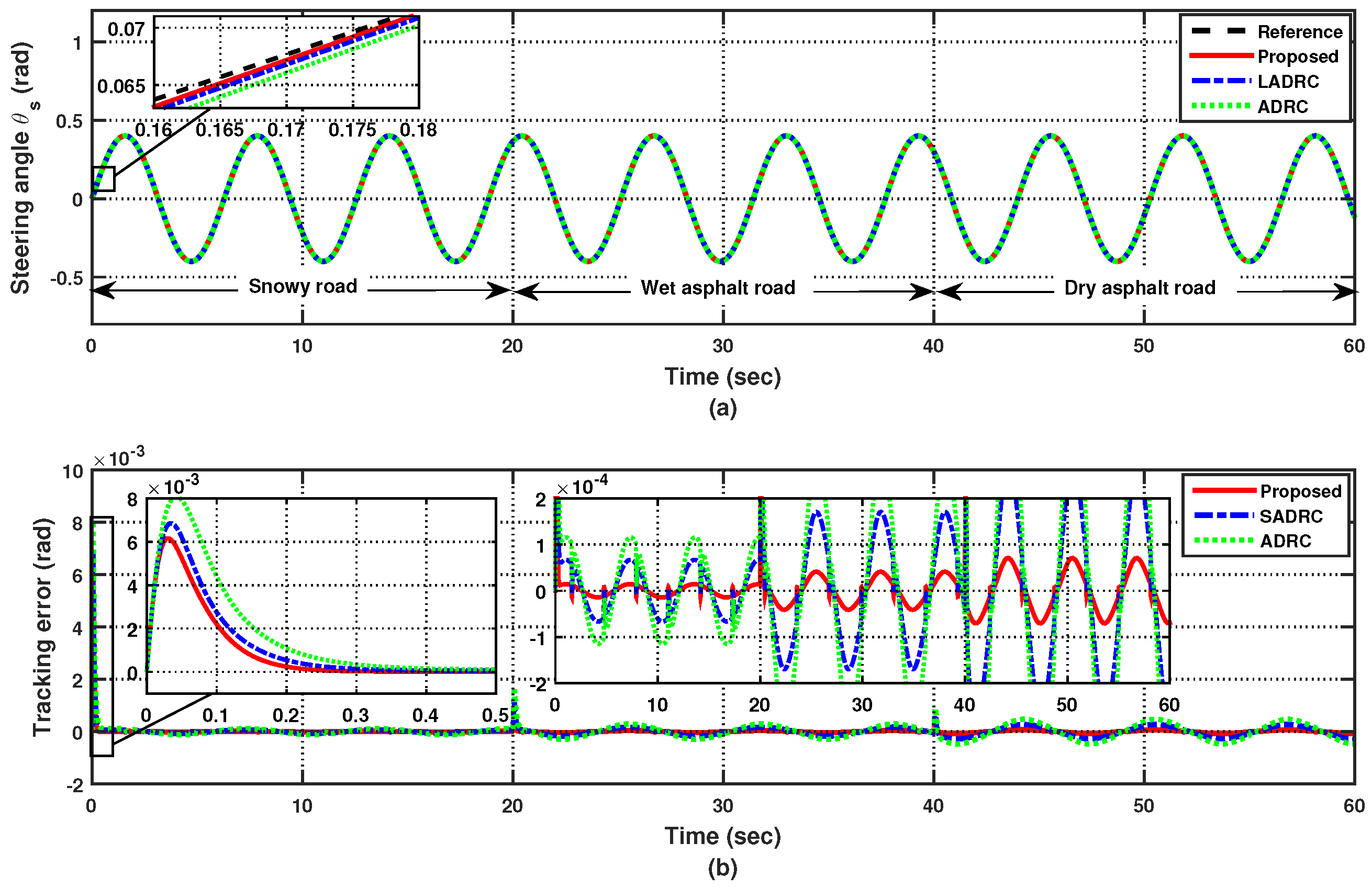
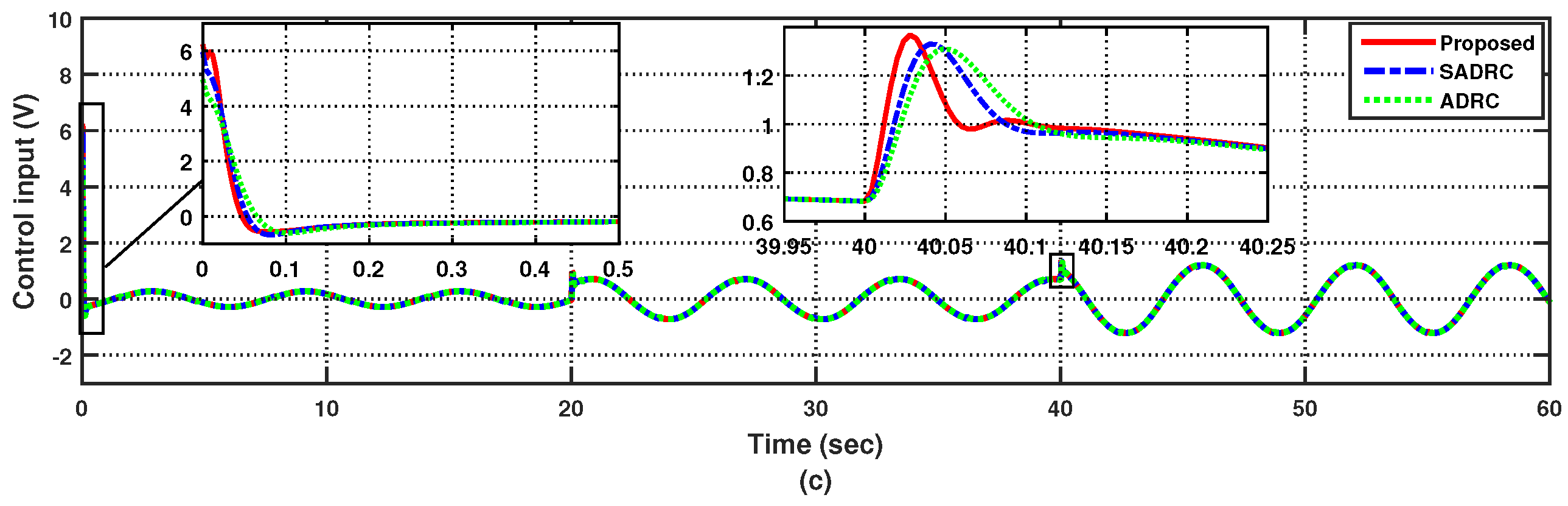
- The effectiveness of our designed controller is rigorously evaluated under three distinct scenarios, providing a comprehensive assessment of its performance. To validate its efficacy, simulation results are compared against two benchmark control methods—scaling ADRC (SADRC) and well-known ADRC. This comparative analysis serves to underscore the advantages and advancements offered by the introduced fast finite-time convergent observer-based control.
2. Description and Mathematical Modeling of the SBW Plant
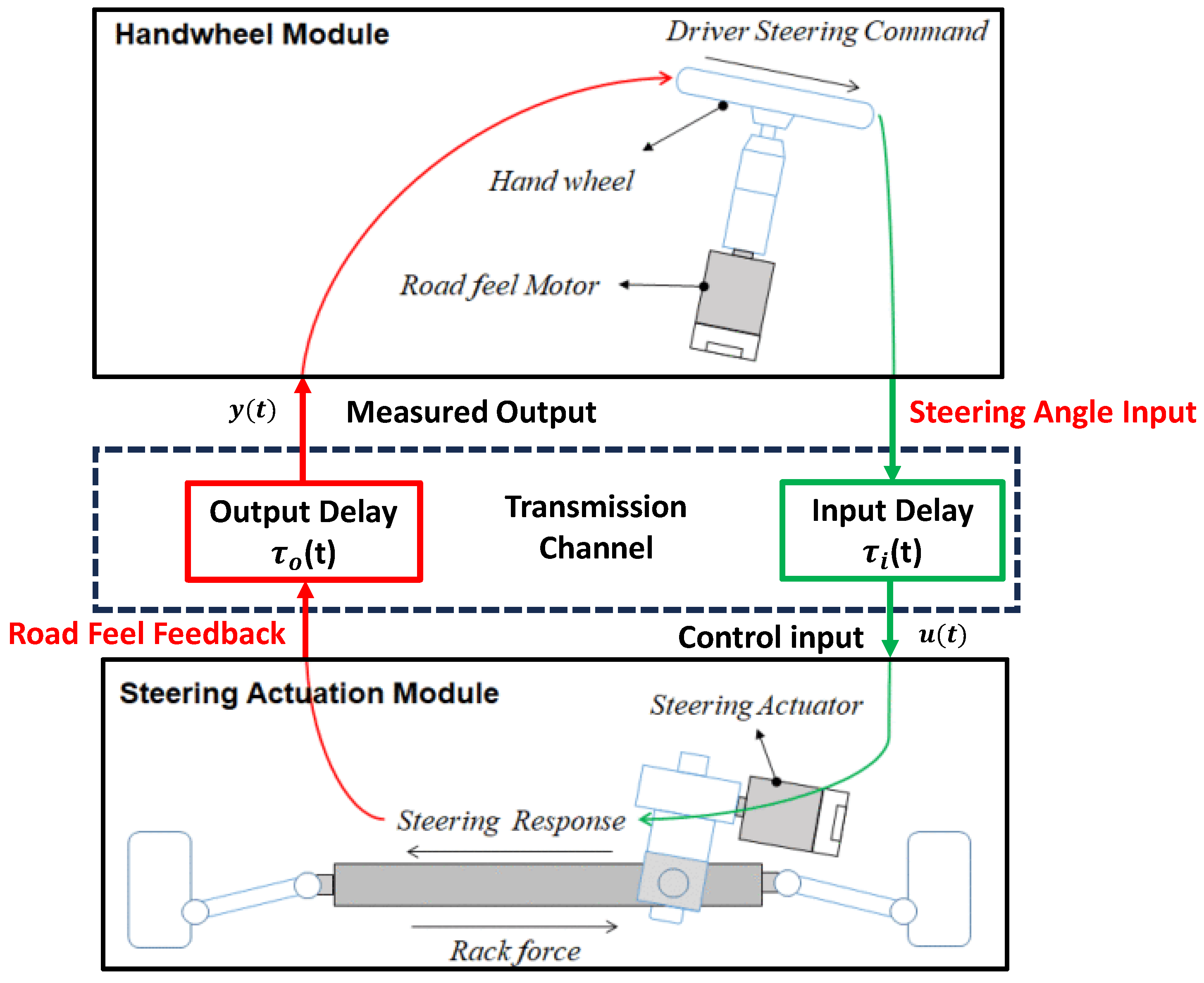
2.1. Architecture of the SBW Plant
2.2. Plant Modeling of the SBW System
2.3. Dynamic Model of the Time-Delayed SBW System with Transmission Channel
3. Control Design
3.1. Helpful Definitions and Lemmas
- 1.
- When there exists a real number , then the continuous scalar function is called a homogeneous function of degree p, such that for
- 2.
- When there exists a real number , the continuous vector field is called a homogeneous vector of degree p, such that for
- 1.
- The homogeneous function and its homogeneity degree, are, respectively, and , where is the dilation weight of the corresponding variable .
- 2.
- A positive-definite and homogeneous function is , which has a degree and the same dilation weight . Then, we conclude that: (a) there exists a constant such that ; (b) also the homogeneous function and its homogeneous degree, are, respectively, and with respect to the dilation weight .
3.2. Change in the SBW Coordinates
3.3. Design of FTC via State Error Feedback
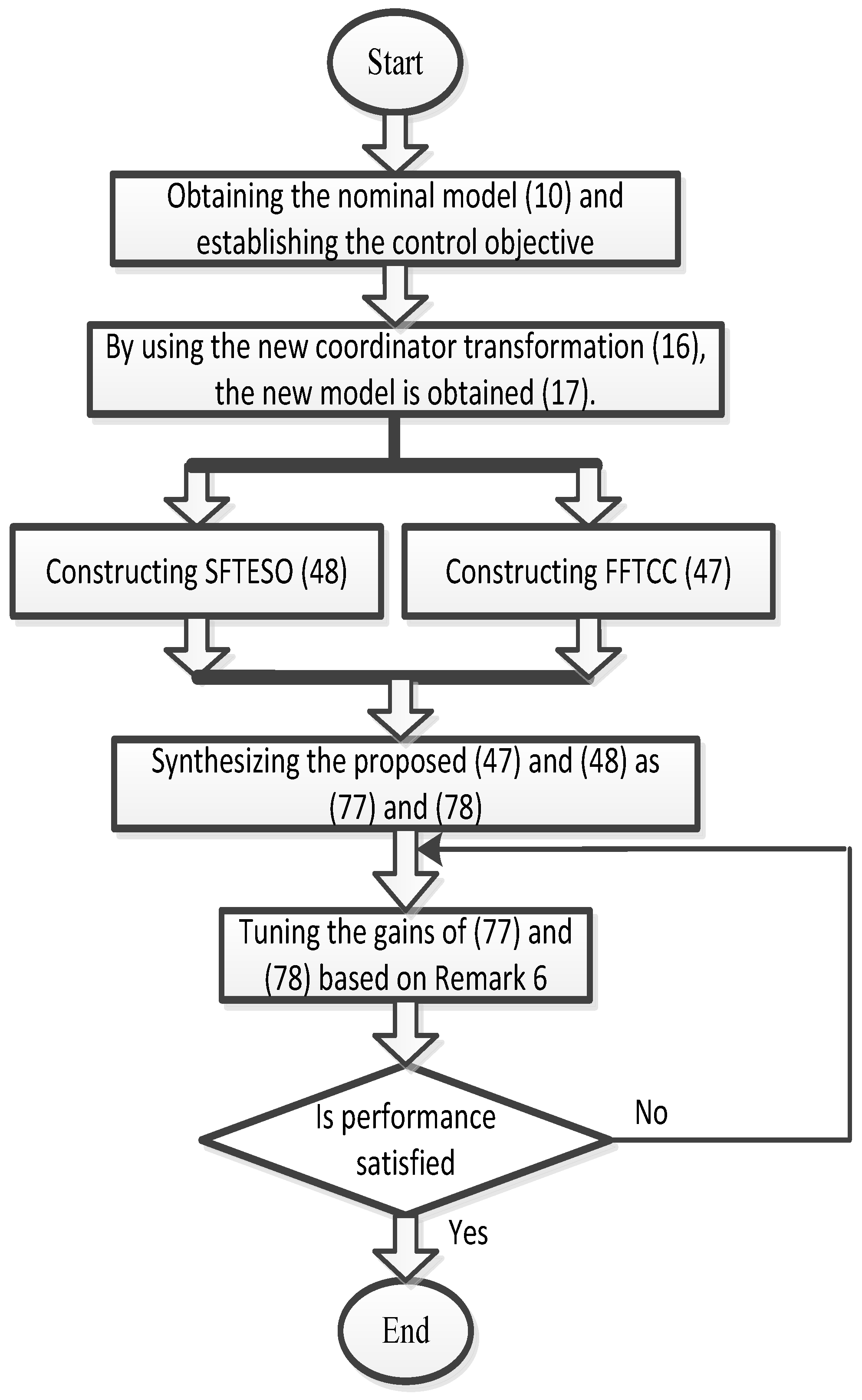
3.4. Design of Fast Finite-Time Composite Controller (FFTCC)
- 1.
- When the lumped disturbance is slow invariant, i.e., , the total closed-loop stability is globally uniformly FTS;
- 2.
- The tracking error variables and estimation errors will move in within an arbitrarily small confined neighborhood in a finite-timewhen the SBW is subject to the time-varying lumped disturbance, i.e., , where , and are positive gains; and are constants found later; and , and are, respectively, the estimations of , and ζ.
- 1.
- Choose an appropriate positive constant and a negative constant . It is illustrated from the proof of Theorem 2 that L and α should be larger to guarantee a much quicker convergence rate and better anti-disturbance performance.
- 2.
- 3.
- 4.
- For the above, , and α are tuned by adopting a trial-and-error manner until a better control performance is achieved.
4. Simulation Results
4.1. Case 1: Nominal Steering for a Sinusoidal Reference Following the Input and Output Time Delay
4.2. Case 2: Uncertain Steering for a Sinusoidal Reference Following the Input and Output Time Delay
4.3. Case 3: Uncertain Steering for a Sinusoidal Reference Following the Time-Varying Delays and External Disturbances
5. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Chen, T.; Xu, X.; Chen, L.; Jiang, H.; Cai, Y.; Li, Y. Estimation of longitudinal force, lateral vehicle speed, and yaw rate for four-wheel independent driven electric vehicles. Mech. Syst. Signal Process. 2018, 101, 377–388. [Google Scholar] [CrossRef]
- Wang, R.; Hu, C.; Wang, Z.; Yan, F.; Chen, N. Integrated optimal dynamics control of 4WD4WS electric ground vehicle with tire-road frictional coefficient estimation. Mech. Syst. Signal Process. 2015, 60, 727–741. [Google Scholar] [CrossRef]
- Zhang, L.; Zhang, Z.; Wang, Z.; Deng, J.; Dorrell, D.G. Chassis coordinated control for full X-by-wire vehicles-A review. Chin. J. Mech. Eng. 2021, 34, 1–25. [Google Scholar] [CrossRef]
- Wang, Z.; Li, Y.; Kaku, C.; Zheng, H. Trajectory Tracking Control of Intelligent X-by-Wire Vehicles. World Electr. Veh. J. 2022, 13, 205. [Google Scholar] [CrossRef]
- Chen, T.; Cai, Y.; Chen, L.; Xu, X.; Sun, X. Trajectory tracking control of steer-by-wire autonomous ground vehicle considering the complete failure of vehicle steering motor. Simul. Model. Pract. Theory 2021, 109, 102235. [Google Scholar] [CrossRef]
- Huang, C.; Naghdy, F.; Du, H. Sliding mode predictive tracking control for uncertain steer-by-wire system. Control Eng. Pract. 2019, 85, 194–205. [Google Scholar] [CrossRef]
- Kong, H.; Liu, T.; Fang, Y.; Yan, J. Robust steering control for a steer-by-wire automated guided vehicle via fixed-time adaptive recursive sliding mode. Trans. Inst. Meas. Control 2023, 45, 2590–2601. [Google Scholar] [CrossRef]
- Pietruch, M.; Wetula, A.; Młyniec, A. Influence of the Accuracy and CAN Frame Period of the Steering Wheel Angle Sensor (SAS) on the Trajectory of a Steer-by-Wire-Equipped Car. IEEE Access 2022, 10, 106110–106116. [Google Scholar] [CrossRef]
- Shao, W.; Liang, X.; Fang, T.; Zhao, L.; Hu, Y. Active steering stability control of steer-by-wire vehicles based on variable horizon-robust model predictive control. J. Braz. Soc. Mech. Sci. Eng. 2023, 45, 410. [Google Scholar] [CrossRef]
- Sun, Z.; Zheng, J.; Man, Z.; Wang, H. Robust control of a vehicle steer-by-wire system using adaptive sliding mode. IEEE Trans. Ind. Electron. 2015, 63, 2251–2262. [Google Scholar] [CrossRef]
- Wang, H.; Man, Z.; Kong, H.; Zhao, Y.; Yu, M.; Cao, Z.; Zheng, J.; Do, M.T. Design and implementation of adaptive terminal sliding-mode control on a steer-by-wire equipped road vehicle. IEee Trans. Ind. Electron. 2016, 63, 5774–5785. [Google Scholar] [CrossRef]
- Sun, Z.; Zheng, J.; Wang, H.; Man, Z. Adaptive fast non-singular terminal sliding mode control for a vehicle steer-by-wire system. IET Control Theory and Appl. 2017, 11, 1245–1254. [Google Scholar] [CrossRef]
- Sun, Z.; Zheng, J.; Man, Z.; Fu, M.; Lu, R. Nested adaptive super-twisting sliding mode control design for a vehicle steer-by-wire system. Mech. Syst. Signal Process. 2019, 122, 658–672. [Google Scholar] [CrossRef]
- Shi, Q.; He, S.; Wang, H.; Stojanovic, V.; Shi, K.; Lv, W. Extended state observer based fractional order sliding mode control for steer-by-wire systems. IET Control Theory and Appl. 2023; early view. [Google Scholar]
- Liang, X.; Zhao, L.; Wang, Q.; Chen, W.; Xia, G.; Hu, J.; Jiang, P. A novel steering-by-wire system with road sense adaptive friction compensation. Mech. Syst. Signal Process. 2022, 169, 108741. [Google Scholar] [CrossRef]
- Shukla, H.; Roy, S.; Gupta, S. Robust adaptive control of steer-by-wire systems under unknown state-dependent uncertainties. Int. J. Adapt. Control Signal Process. 2022, 36, 198–208. [Google Scholar] [CrossRef]
- Ye, M.; Wang, H. Robust adaptive integral terminal sliding mode control for steer-by-wire systems based on extreme learning machine. Comput. Electr. Eng. 2020, 86, 106756. [Google Scholar] [CrossRef]
- Zhang, J.; Wang, H.; Ma, M.; Yu, M.; Yazdani, A.; Chen, L. Active front steering-based electronic stability control for steer-by-wire vehicles via terminal sliding mode and extreme learning machine. IEEE Trans. Veh. Technol. 2020, 69, 14713–14726. [Google Scholar] [CrossRef]
- Zhao, J.; Yang, K.; Cao, Y.; Liang, Z.; Li, W.; Xie, Z.; Wong, P.K. Observer-Based Discrete-Time Cascaded Control for Lateral Stabilization of Steer-by-Wire Vehicles With Uncertainties and Disturbances. IEEE Trans. Circuits Syst. Regul. Pap. 2023. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, Y.; Wang, Y.; Chai, T. Neural output feedback control of automobile steer-by-wire system with predefined performance and composite learning. IEEE Trans. Veh. Technol. 2023, 72, 5906–5921. [Google Scholar] [CrossRef]
- Li, Z.; Jiao, X.; Zhang, T. Robust H∞ Output Feedback Trajectory Tracking Control for Steer-by-Wire Four-Wheel Independent Actuated Electric Vehicles. World Electr. Veh. J. 2023, 14, 147. [Google Scholar] [CrossRef]
- Shah, M.B.N.; Husain, A.R.; Aysan, H.; Punnekkat, S.; Dobrin, R.; Bender, F.A. Error handling algorithm and probabilistic analysis under fault for CAN-based steer-by-wire system. IEEE Transactions Ind. Inform. 2016, 12, 1017–1034. [Google Scholar] [CrossRef]
- Lu, Y.; Liang, J.; Wang, F.; Yin, G.; Pi, D.; Feng, J.; Liu, H. An active front steering system design considering the CAN network delay. IEEE Transactions Transp. Electrif. 2023, 9, 5244–5256. [Google Scholar] [CrossRef]
- Ye, Q.; Wang, R.; Cai, Y.; Chadli, M. The stability and accuracy analysis of automatic steering system with time delay. ISA Trans. 2020, 104, 278–286. [Google Scholar] [CrossRef] [PubMed]
- Yang, Y.; Yan, Y.; Xu, X. Fractional order adaptive fast super-twisting sliding mode control for steer-by-wire vehicles with time-delay estimation. Electronics 2021, 10, 2424. [Google Scholar] [CrossRef]
- Zhang, B.; Zhao, W.; Wang, C.; Lian, Y. Layered Time-delay Robust Control Strategy for Yaw Stability of SBW Vehicles. IEEE Trans. Intell. Veh. 2023, 8, 1–11. [Google Scholar] [CrossRef]
- Yih, P.; Gerdes, J.C. Modification of vehicle handling characteristics via steer-by-wire. IEEE Trans. Control Syst. Technol. 2005, 13, 965–976. [Google Scholar] [CrossRef]
- Rajamani, R. Vehicle Dynamics and Control; Springer: New York, NY, USA, 2012. [Google Scholar]
- Wang, H.; Kong, H.; Man, Z.; Tuan, D.; Cao, Z.; Shen, W. Sliding mode control for steer-by-wire systems with AC motors in road vehicles. IEEE Trans. Ind. Electron. 2013, 61, 1596–1611. [Google Scholar] [CrossRef]
- Baviskar, A.; Wagner, J.R.; Dawson, D.M.; Braganza, D.; Setlur, P. An adjustable steer-by-wire haptic-interface tracking controller for ground vehicles. IEEE Trans. Veh. Technol. 2008, 58, 546–554. [Google Scholar] [CrossRef]
- Wu, Q.; Yu, L.; Wang, Y.W.; Zhang, W.A. LESO-based position synchronization control for networked multi-axis servo systems with time-varying delay. IEEE/CAA J. Autom. Sin. 2020, 7, 1116–1123. [Google Scholar] [CrossRef]
- Moulay, E.; Perruquetti, W. Finite time stability conditions for non-autonomous continuous systems. Int. J. Control 2008, 81, 797–803. [Google Scholar] [CrossRef]
- Bhat, S.P.; Bernstein, D.S. Finite-time stability of continuous autonomous systems. SIAM J. Control Optim. 2000, 38, 751–766. [Google Scholar] [CrossRef]
- Bacciotti, A.; Rosier, L. Liapunov Functions and Stability in Control Theory; Springer: Berlin/Heidelberg, Germany, 2005. [Google Scholar]
- Li, J.; Qian, C.; Ding, S. Global finite-time stabilisation by output feedback for a class of uncertain nonlinear systems. International Journal of Control. Int. J. Control 2010, 83, 2241–2252. [Google Scholar] [CrossRef]
- Zhu, W.; Du, H.; Li, S.; Yu, X. Design of output-based finite-time convergent composite controller for a class of perturbed second-order nonlinear systems. IEEE Trans. Syst. Man, Cybern. Syst. 2020, 51, 6768–6778. [Google Scholar] [CrossRef]
- Hong, Y.; Huang, J.; Xu, Y. On an output feedback finite-time stabilization problem. IEEE Trans. Autom. Control 2001, 46, 305–309. [Google Scholar] [CrossRef]
- Orlov, Y.; Aoustin, Y.; Chevallereau, C. Finite time stabilization of a perturbed double integrator—Part I: Continuous sliding mode-based output feedback synthesis. IEEE Trans. Autom. Control 2010, 56, 614–618. [Google Scholar] [CrossRef]
- Levant, A. Higher-order sliding modes, differentiation and output-feedback control. Int. J. Control 2003, 76, 924–941. [Google Scholar] [CrossRef]
- Li, G.; Wang, X.; Li, S. Finite-time output consensus of higher-order multiagent systems with mismatched disturbances and unknown state elements. IEEE Trans. Syst. Man, Cybern. Syst. 2017, 49, 2571–2581. [Google Scholar] [CrossRef]
- Qian, C.; Lin, W. Output feedback control of a class of nonlinear systems: A nonseparation principle paradigm. IEEE Trans. Autom. Control 2002, 47, 1710–1715. [Google Scholar] [CrossRef]
- Du, H.; Qian, C.; Yang, S.; Li, S. Recursive design of finite-time convergent observers for a class of time-varying nonlinear systems. Automatica 2013, 49, 601–609. [Google Scholar] [CrossRef]
- Han, J. From PID to Active Disturbance Rejection Control. IEEE Trans. Ind. Electron. 2009, 56, 900–906. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbols | Descriptions | Values | Units |
|---|---|---|---|
| Equivalent inertial moment of the SBW system | 85.5 | kg m2 | |
| Equivalent viscous damping friction of the SBW system | 218.8 | N ms/rad | |
| Coulomb friction constant | 4.2 | N m | |
| Scale factor to account for transmitting from the linear motion of the rack to the steering angle of front wheels | 6.0 | - | |
| Gear ratio between the pinion and rack system | 3.0 | - | |
| Gear ratio of the gear head | 8.5 | - | |
| Scale factor accounting for converting from the input voltage of steering motor to the output torque of steering motor | 1.8 | - |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rsetam, K.; Khawwaf, J.; Zheng, Y.; Cao, Z.; Man, Z. Fast Finite-Time Composite Controller for Vehicle Steer-by-Wire Systems with Communication Delays. World Electr. Veh. J. 2024, 15, 132. https://doi.org/10.3390/wevj15040132
Rsetam K, Khawwaf J, Zheng Y, Cao Z, Man Z. Fast Finite-Time Composite Controller for Vehicle Steer-by-Wire Systems with Communication Delays. World Electric Vehicle Journal. 2024; 15(4):132. https://doi.org/10.3390/wevj15040132
Chicago/Turabian StyleRsetam, Kamal, Jasim Khawwaf, Yusai Zheng, Zhenwei Cao, and Zhihong Man. 2024. "Fast Finite-Time Composite Controller for Vehicle Steer-by-Wire Systems with Communication Delays" World Electric Vehicle Journal 15, no. 4: 132. https://doi.org/10.3390/wevj15040132
APA StyleRsetam, K., Khawwaf, J., Zheng, Y., Cao, Z., & Man, Z. (2024). Fast Finite-Time Composite Controller for Vehicle Steer-by-Wire Systems with Communication Delays. World Electric Vehicle Journal, 15(4), 132. https://doi.org/10.3390/wevj15040132